167



114
CAPITOLO 11
IL PIANO CARTESIANO
11.1 I numeri reali
Considera le seguenti proposizioni aperte:
a) Il quadrato di un numero razionale è uguale a 5.
b) Un numero razionale esprime la misura dell’ipotenusa di un triangolo rettangolo isoscele i cui
cateti hanno misura unitaria.
È facile osservare (ed è possibile dimostrarlo) che, nell’insieme dei numeri razionali, non esistono
numeri che rendono vera la proposizione a) o la proposizione b).
Problemi di questo tipo hanno portato alla “costruzione” di un nuovo insieme numerico.
Nel capitolo 2 abbiamo chiamato numero razionale qualsiasi numero decimale limitato finito
(positivo o negativo) e qualsiasi numero decimale illimitato periodico (positivo o negativo).
Esistono numeri decimali illimitati non periodici? La risposta è affermativa.
Già nella scuola media hai incontrato numeri di questo tipo:
• il numero π (solitamente approssimato a 3.14) che esprime il rapporto fra la misura di una
circonferenza ed il suo diametro;
• il numero 2 che esprime il rapporto fra la lunghezza della diagonale di un quadrato ed il
suo lato.
I numeri come 3 1, 2, 2, 5 , ...3
π π , 3 e quelli che rendono vere proposizioni del tipo a) e b) sono
chiamati numeri irrazionali .
Possiamo dare, allora, la seguente definizione:
si chiama numero irrazionale un qualsiasi numero decimale illimitato non periodico.
L’ insieme dei numeri irrazionali si indica con I .
È ovvio che i numeri irrazionali, così come quelli razionali, possono essere preceduti dal segno “+”
o dal segno “−”; si hanno, dunque, numeri irrazionali positivi e numeri irrazionali negativi.
Si chiama insieme dei numeri reali e si indica con R l’insieme ottenuto dall’unione dell’insieme
dei numeri razionali con l’insieme dei numeri irrazionali .
In simboli: R = Q ∪∪∪∪ I
È evidente che:
Q ∩∩∩∩ I = ∅∅∅∅; Q ⊂⊂⊂⊂ R; I ⊂⊂⊂⊂ R.

115
Con l’introduzione dei numeri reali viene risolto anche il problema di poter associare ad ogni
segmento un numero che esprima la sua lunghezza rispetto ad una unità di misura fissata:
� se il rapporto fra due segmenti è espresso da un numero razionale, i due segmenti si dicono
commensurabili;
� se il rapporto fra due segmenti è espresso da un numero irrazionale, i due segmenti si
dicono incommensurabili.
Poiché non è possibile indicare tutte le cifre decimali di un numero irrazionale, possiamo solo
scriverne un valore approssimato per difetto o per eccesso.
Se scriviamo un numero irrazionale (approssimato per difetto) indicando solo la prima cifra
decimale si dice che esso è approssimato “a meno di un decimo”, se lo scriviamo indicando le prime
due cifre decimali si dice che esso è approssimato “a meno di un centesimo” e così via.
Con l’introduzione dell’insieme dei numeri reali, la rappresentazione degli insiemi numerici con i
diagrammi di Eulero − Venn è la seguente:
Nell’insieme dei numeri reali sono definite le operazioni di somma algebrica, moltiplicazione,
divisione e vale la legge di annullamento del prodotto.
In seguito approfondiremo il concetto di numero reale e studieremo le operazioni definite in R.
PROVA TU
Quali, fra i seguenti numeri sono numeri irrazionali?
25
π ; 2,12; 3 4− ; 5,37; 2 73
; 5 .π−
R
Q
N Z

116
11.2 Rappresentazione dei numeri reali
Nel capitolo 2 abbiamo detto che i numeri naturali si rappresentano su una semiretta orientata e che
abbiamo preferito rappresentarli su una retta orientata perché, successivamente, avremmo
“arricchito” tale retta. Infatti la “retta dei numeri” è stata, successivamente, “arricchita” con la
rappresentazione degli interi (relativi) e dei numeri razionali.
Tuttavia, se ad ogni numero razionale corrisponde un punto sulla retta, non accade il viceversa, cioè
ad ogni punto della retta non corrisponde un numero razionale. È come se, la “retta dei numeri
razionali” avesse dei “buchi”.
La “retta dei numeri”, dunque, può essere ancora “arricchita”.
A ciascuno di questi “buchi” corrisponde un numero irrazionale.
Esiste, allora, una corrispondenza biunivoca fra l’insieme dei numeri reali ed i punti di una
retta: ad ogni numero reale è associato un solo punto della retta e, viceversa, ad ogni punto
della retta è associato un solo numero reale.
Per questo motivo, si dice che l’insieme dei numeri reali è un insieme continuo.
Come procedere per rappresentare un numero reale su una retta?
Sappiamo già rappresentare sulla retta un numero razionale; vediamo, con un esempio, come
possiamo rappresentare un numero irrazionale.
Esempio
Rappresentiamo i numeri irrazionali 2 e 2− .
Siano r una retta orientata (per convenzione, da sinistra verso destra) ed AB un segmento la cui
misura, rispetto all’unità di misura prefissata, sia 2 ; applichiamo al segmento AB una isometria ϕ
tale che
( )( )φ A = O
φ B = B', B'
B' segua O
r
∈
Al punto B' così ottenuto corrisponde il numero irrazionale2 .
Al punto C' , simmetrico di B' rispetto al punto O (al quale è associato il numero 0), corrisponde il
numero irrazionale 2− .
ϕ ϕ
r

117
Tuttavia, non è sempre necessario rappresentare i numeri reali con la massima precisione; possiamo
rappresentarli anche in maniera approssimata, purchè sia rispettato l’ordinamento. Non c’è, quindi,
bisogno di “riportare” sempre il segmento avente quella data misura, ma è sufficiente, spesso,
stabilire fra quali interi esso è compreso o, comunque, quale, tra due numeri irrazionali, precede
l’altro.
La retta sulla quale rappresentiamo i numeri reali è detta anche retta reale o asse reale.
Esempio
Rappresentiamo i numeri reali
a) 7− , b) 12
a) 7− è l’opposto di 7 ; determiniamo, allora, due interi tali che uno sia il maggiore fra i
quadrati che precedono 7 e l’altro sia il minore fra i quadrati che seguono 7. I due numeri cercati
sono 4 e 7; si ha: 4 < 7 < 9 ⇒ 2 < 7 < 3.
“Per simmetria”, si avrà −3 < 7− < −2
Rappresentiamo 7− associandolo ad un punto compreso fra −3 e −2:
b) Per rappresentare 12 , determiniamo due interi con le stesse caratteristiche dell’esempio a); i
due numeri cercati sono 9 e 16; si ha: 9 < 12 < 16 ⇒ 3 < 12 < 4.
Rappresentiamo 12 associandolo ad un punto compreso fra 3 e 4:
PROVA TU
1) Completa le seguenti relazioni inserendo i simboli <, > in modo che esse risultino vere:
5 .....3; 2 ..... 2;3
837 ..... ;2
23 .....5; ..... 8;π 8 ..... 10 .
2) Rappresenta i seguenti numeri reali:
23
− , 3− , 12
, 2− , 65
, 5
3) Rappresenta i seguenti numeri reali:
3 2; 3 7−
(suggerimento: determina due interi che siano cubi perfetti tali che ………..)
− 7− 7− 7− 7
12121212

118
11.3 Ascisse su una retta
Nel paragrafo precedente abbiamo visto che esiste una corrispondenza biunivoca fra i punti di una
retta e l’insieme dei numeri reali.
Consideriamo, allora, una retta r sulla quale scegliamo:
• un orientamento o verso di percorrenza (per consuetudine, da sinistra verso destra);
• un punto O come origine delle due semirette nelle quali la retta resta divisa dal punto stesso;
• un punto A (che segue O); il segmento OA è l’unità di misura.
Si dice, allora, che sulla retta è stato fissato un sistema di ascisse (fig.1):
(fig. 1)
Scegliamo, sulla retta r, un punto C in modo che O preceda C.
Al punto C è possibile associare il numero reale che esprime la misura del segmento OC rispetto al
segmento OA e, poiché C segue O, esso sarà preceduto dal segno “+”: questo numero reale
(positivo) è chiamato ascissa di C. Come per i numeri razionali, anche per i numeri reali il segno
“+” si può omettere.
In fig. 2, la misura del segmento OC rispetto al segmento OA è 3 OC 3OA =
: il punto C, dunque, ha
ascissa 3 e si scrive C(3).
fig. 2 Scegliamo, sulla retta r, un punto E in modo che O segua E.
Al punto E è possibile associare il numero reale che esprime la misura del segmento EO rispetto al
segmento OA e, poiché E precede O, esso sarà preceduto dal segno “−” : tale numero (negativo) è
l’ascissa di E.
In fig. 3, la misura del segmento EO rispetto al segmento OA è 2 EO 2OA =
; il punto E, dunque,
ha ascissa −2 e si scrive E(−2).
fig. 3
La misura del segmento OA è, ovviamente, 1; quindi l’ascissa di A è 1 e si scrive A(1).
Il segmento OO ha misura nulla; quindi l’ascissa di O è 0 e si scrive O(0).
119
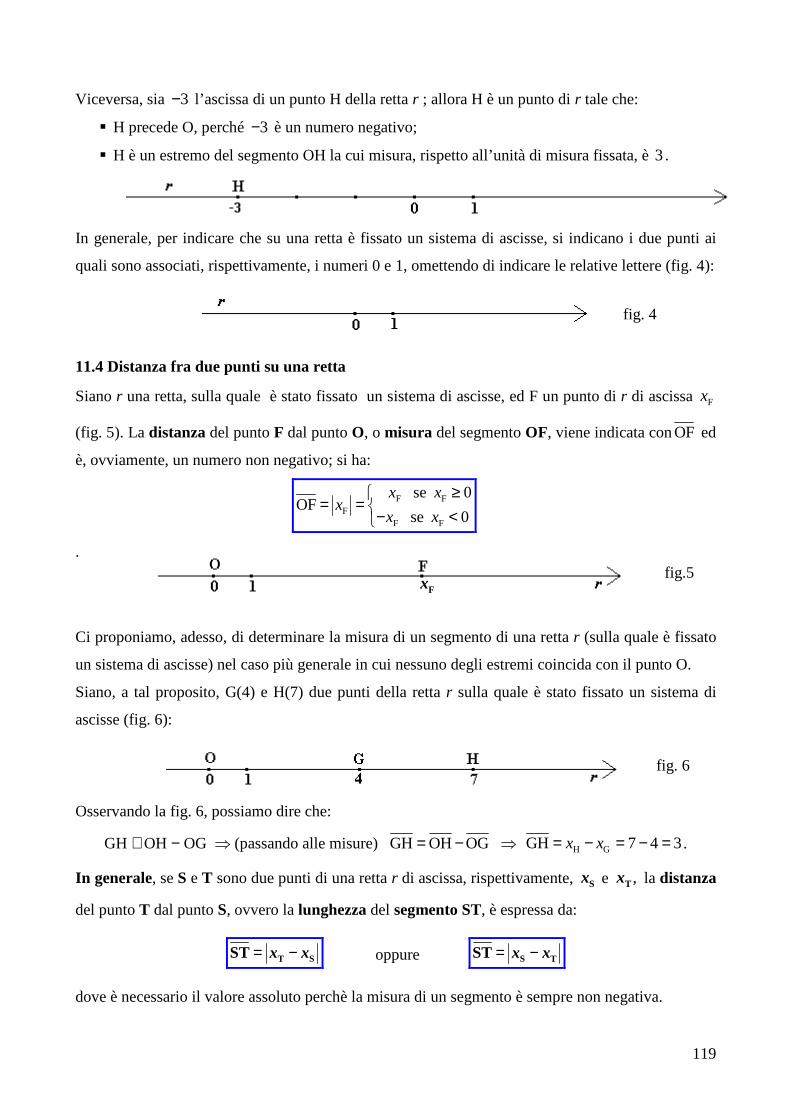
Viceversa, sia 3− l’ascissa di un punto H della retta r ; allora H è un punto di r tale che:
� H precede O, perché 3− è un numero negativo;
� H è un estremo del segmento OH la cui misura, rispetto all’unità di misura fissata, è 3.
In generale, per indicare che su una retta è fissato un sistema di ascisse, si indicano i due punti ai
quali sono associati, rispettivamente, i numeri 0 e 1, omettendo di indicare le relative lettere (fig. 4):
fig. 4
11.4 Distanza fra due punti su una retta
Siano r una retta, sulla quale è stato fissato un sistema di ascisse, ed F un punto di r di ascissa Fx
(fig. 5). La distanza del punto F dal punto O, o misura del segmento OF, viene indicata conOF ed
è, ovviamente, un numero non negativo; si ha:
F FF
F F
se 0OF
se 0
x xx
x x
≥= = − <
. fig.5
Ci proponiamo, adesso, di determinare la misura di un segmento di una retta r (sulla quale è fissato
un sistema di ascisse) nel caso più generale in cui nessuno degli estremi coincida con il punto O.
Siano, a tal proposito, G(4) e H(7) due punti della retta r sulla quale è stato fissato un sistema di
ascisse (fig. 6):
fig. 6
Osservando la fig. 6, possiamo dire che:
GH ≅ OH − OG ⇒ (passando alle misure) GH OH OG= − ⇒ H GGH 7 4 3x x= − = − = .
In generale, se S e T sono due punti di una retta r di ascissa, rispettivamente, Sx e ,Tx la distanza
del punto T dal punto S, ovvero la lunghezza del segmento ST, è espressa da:
= −T SST x x oppure = −S TST x x
dove è necessario il valore assoluto perchè la misura di un segmento è sempre non negativa.
Fx

120
ATTENZIONE
AB ≠ AB
Infatti:
• AB indica un segmento di estremi A e B e, quindi, è una figura del piano;
• AB è la misura del segmento AB rispetto ad una prefissata unità di misura e, quindi è un
numero reale (≥ 0).
Un segmento è sempre diverso da un numero!
PROVA TU
Sia t una retta sulla quale è stato fissato un sistema di ascisse.
a) Rappresenta sulla retta t i seguenti punti:
B(4); F(−3); G32
; H12
−
; T( )5 .
b) Determina la distanza fra le coppie di punti:
B e F; F e H; G e B.
c) Determina la lunghezza dei segmenti:
FG; HG; BH.
11.5 Punto medio di un segmento su una retta
Sia s una retta sulla quale è stato fissato un sistema di ascisse e siano C e D due punti di s di ascissa,
rispettivamente, 4 e 9: C(4), D(9).
Sia M il punto medio di CD; determiniamo l’ascissa di M (fig. 7):
fig. 7
Indichiamo con Mx l’ascissa di M.
Osserviamo che (per definizione di punto medio di un segmento) CM ≅ MD ⇒ CM MD= .
Poiché M è interno al segmento CD, si ha M C M C
D M D M
0
0
x x x x
x x x x
> ⇒ − > > ⇒ − >
⇒ M C M
D M M
CM 4
MD 9
x x x
x x x
= − = −
= − = −
Formalizzando la relazione CM MD= , si ottiene la seguente equazione (incognita Mx ):
M M4 9x x− = −
s

121
Risolviamo l’equazione ottenuta:
M M4 9x x− = − ⇒ M2 9 4x = + ⇒ M2 13x = ⇒ M132
x =
Abbiamo, così, determinato l’ascissa del punto M (punto medio di CD): 13M2
.
Generalizziamo, adesso, il procedimento seguito nell’esempio precedente.
Siano A( )Ax e B( )Bx due punti di una retta r sulla quale è stato fissato un sistema di ascisse; sia M
il punto medio del segmento AB (fig. 8). Determiniamo l’ascissa Mx del punto M.
fig. 8
Osserviamo che AM ≅ MB ⇒ AM MB= .
Poiché M è interno al segmento AB, si ha M A M A
B M B M
0
0
x x x x
x x x x
> ⇒ − > > ⇒ − >
⇒ M A
B M
AM
MB
x x
x x
= −
= −
Formalizzando la relazione AM MB= , si ottiene la seguente equazione:
M A B Mx x x x− = −
Risolviamo l’equazione ottenuta, nell’incognita Mx :
M A B Mx x x x− = − ⇒ M A B2x x x= + ⇒ A BM 2
x xx
+=
In sintesi, dati i punti A ( )Ax e B( )Bx , l’ascissa Mx del punto medio M di AB è
A BM 2
x xx
++++====
PROVA TU
Dati i punti
F(3), K(−4), S(−6), P23
,
determina l’ascissa del punto medio di ciascuno dei seguenti segmenti:
a) KS; PF
b) KP; SP
r Ax Bx
122
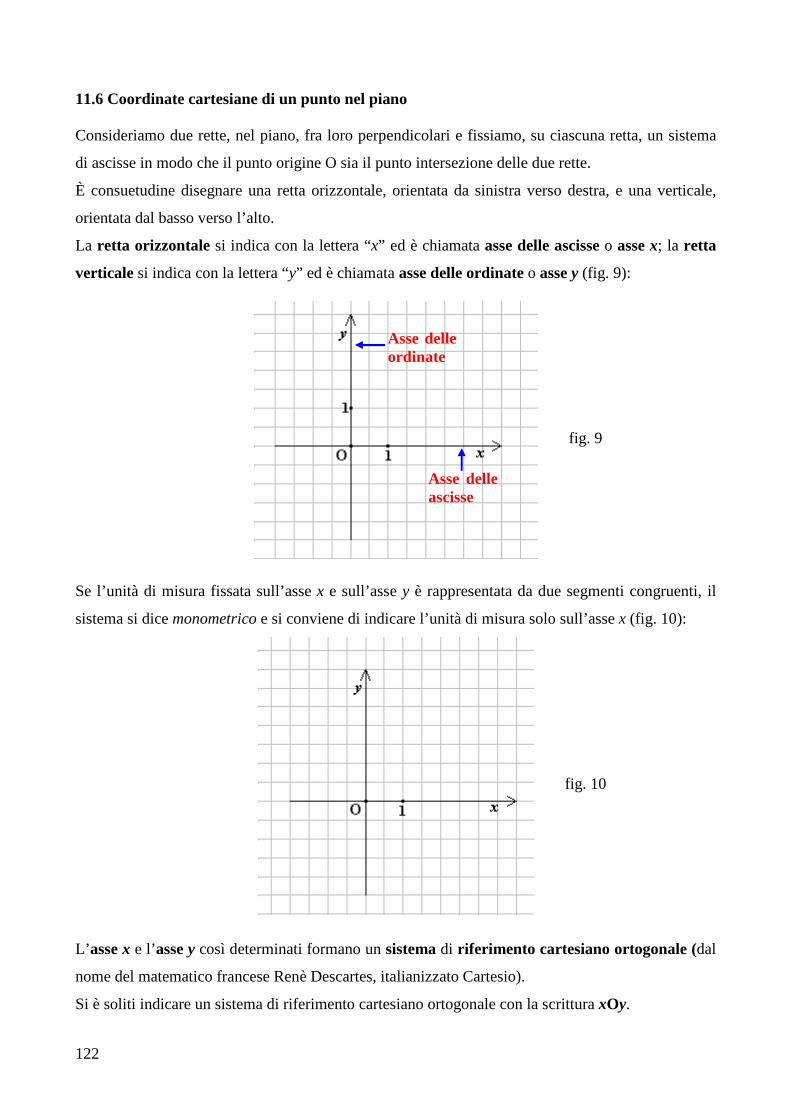
11.6 Coordinate cartesiane di un punto nel piano
Consideriamo due rette, nel piano, fra loro perpendicolari e fissiamo, su ciascuna retta, un sistema
di ascisse in modo che il punto origine O sia il punto intersezione delle due rette.
È consuetudine disegnare una retta orizzontale, orientata da sinistra verso destra, e una verticale,
orientata dal basso verso l’alto.
La retta orizzontale si indica con la lettera “x” ed è chiamata asse delle ascisse o asse x; la retta
verticale si indica con la lettera “y” ed è chiamata asse delle ordinate o asse y (fig. 9):
fig. 9
Se l’unità di misura fissata sull’asse x e sull’asse y è rappresentata da due segmenti congruenti, il
sistema si dice monometrico e si conviene di indicare l’unità di misura solo sull’asse x (fig. 10):
fig. 10
L’ asse x e l’asse y così determinati formano un sistema di riferimento cartesiano ortogonale (dal
nome del matematico francese Renè Descartes, italianizzato Cartesio).
Si è soliti indicare un sistema di riferimento cartesiano ortogonale con la scrittura xOy.
Asse delle ordinate
Asse delle ascisse

123
1T 1T
Un piano nel quale è fissato un sistema di riferimento cartesiano ortogonale prende il nome di
piano cartesiano.
L’asse x e l’asse y dividono il piano cartesiano in quattro parti; ciascuna di esse si chiama
quadrante. In figura 11 sono indicati i nomi dei quattro quadranti.
fig. 11
Sia, ora, T un punto del piano cartesiano.
Indichiamo con 1T la proiezione di T sull’asse x e con 2T la proiezione di T sull’asse y; 1T ha
ascissa 2 (fig. 12a) e 2T ha ascissa 3 (fig. 12b).
fig. 12a
fig. 12b
Al punto T del piano, allora, resta associata la coppia ordinata ( )2,3 ; i numeri 2 e 3 sono le
coordinate cartesiane di T e si scrive T ( )2,3 .
Il primo elemento della coppia (2) si chiama ascissa di T, il secondo elemento (3) si chiama
ordinata di T.
2T
I quadrante II quadrante
III quadrante IV quadrante
2T

124
Possiamo ripetere il procedimento esposto in precedenza per qualsiasi punto del piano.
In generale, dunque, ad ogni punto P del piano è possibile associare una coppia ordinata di
numeri reali, indicata con (x, y), dove x rappresenta l’ascissa e y l’ordinata di P e si scrive P(x, y).
PROVA TU
Individua le coordinate cartesiane dei punti rappresentati nella seguente figura:
� Adesso, siano 3 e 5 le ascisse di due punti A e B appartenenti, rispettivamente, all’asse x e
all’asse y (fig. 13a). Indichiamo con a la perpendicolare all’asse x passante per A, con b la
perpendicolare all’asse y passante per B e sia C = a ∩ b (fig. 13b).
fig. 13a fig. 13b
Alla coppia ordinata (3, 5), dunque, è associato il punto C.

125
Ovviamente, per quanto osservato in precedenza, il primo elemento della coppia (3) è l’ascissa di C
ed il secondo elemento (5) è l’ordinata di C.
È possibile applicare il procedimento appena descritto a qualunque coppia ordinata di numeri reali.
In generale, quindi, ad ogni coppia ordinata di numeri reali corrisponde un punto del piano
(cartesiano).
Possiamo, allora, così sintetizzare:
• ad ogni punto del piano (cartesiano) corrisponde una coppia ordinata di numeri reali ;
• ad ogni coppia ordinata di numeri reali corrisponde un punto del piano (cartesiano).
Osservazione
Coppie ordinate di numeri reali sono elementi del prodotto cartesiano = ×2R R R; quindi, la
relazione che ad ogni elemento di 2R associa un punto P del piano α è una funzione biunivoca.
f : (x, y) ∈∈∈∈ 2R →→→→ P ∈∈∈∈αααα è una funzione biunivoca
Nella fig. 14 sono rappresentati i punti ( )E 2,1− , ( )F 4, 1− , ( )G 3, 2− − , ( )H 1,2 .
fig. 14
Osserviamo che:
• H è situato nel I quadrante: l’ascissa di H è positiva, l’ordinata di H è positiva;
• E è situato nel II quadrante: l’ascissa di E è negativa, l’ordinata di E è positiva;
• G è situato nel III quadrante: l’ascissa di G è negativa, l’ordinata di G è negativa;
• F è situato nel IV quadrante: l’ascissa di F è positiva, l’ordinata di F è negativa.

126
Una semplice riflessione ci permette di generalizzare (fig. 15):
fig. 15
� i punti del I quadrante hanno ascissa positiva e ordinata positiva;
� i punti del II quadrante hanno ascissa negativa e ordinata positiva;
� i punti del III quadrante hanno ascissa negativa e ordinata negativa;
� i punti del IV quadrante hanno ascissa positiva e ordinata negativa;
� i punti dell’asse delle ascisse hanno ordinata 0;
� i punti dell’asse delle ordinate hanno ascissa 0;
� il punto O (origine degli assi) ha coordinate (0,0).
PROVA TU
Rappresenta in un piano cartesiano i punti
a) A(−1, 3); B(4, −3); 4C 5,5
−
;
b) D(2, 0); E(0, −4); 1F 7,2
.
11.7 Distanza fra due punti nel piano cartesiano
Considerati due punti F e G in un piano cartesiano, si possono verificare i seguenti casi:
a) F e G hanno la stessa ordinata;
b) F e G hanno la stessa ascissa;
c) F e G hanno ascissa diversa e ordinata diversa.
x > 0 y > 0
x > 0 y < 0
x < 0 y > 0
x < 0 y < 0

127
Determiniamo la distanza fra i due punti nei diversi casi.
a) F e G hanno la stessa ordinata.
Siano ( )F 3,− 2 e G( )4,2 due punti del piano cartesiano; indichiamo con 1F la proiezione di F
sull’asse delle ascisse e con 1G la proiezione di G sull’asse delle ascisse (fig. 16):
fig. 16
Osserviamo che:
• 1FF // 1GG perché perpendicolari alla stessa retta (asse delle ascisse);
• ( )1 1 1 1FF OH GG OH FF (perchGG ;è?)≅ ∧ ≅ ⇒ ≅
• 1F e F hanno la stessa ascissa (−3);
• 1G e G hanno la stessa ascissa (4).
Il quadrilatero 1 1FG GF è un parallelogramma per avere due lati opposti paralleli e congruenti; in
particolare, è un rettangolo perché due angoli consecutivi sono angoli retti.
I lati opposti FG e 1 1FG sono, pertanto, paralleli e congruenti; quindi:
� FG è parallelo all’asse delle ascisse;
� i segmenti FG e 1 1FG hanno la stessa misura.
Il segmento 1 1FG è situato sull’asse delle ascisse che è una retta sulla quale è stato fissato un
sistema di ascisse; siamo, quindi, in grado di determinarne la lunghezza:
1 11 1 G FFG .x x= −
Ma 1 1F F G Gex x x x= = e 1 1FG FG= ; si ottiene, allora:
( )G FFG 4 3 4 3 7 7.x x= − = − − = + = =
1F 1G

128
Proviamo, insieme, a generalizzare.
Riferendoti alla figura 17, nella quale sono rappresentati i punti ( )A AA ,x y e ( )B AB ,x y , completa
le seguenti proposizioni:
fig. 17
� A1 e A hanno la stessa …………….…..… (…....);
� B1 e B hanno la stessa …………….…….. (…....);
Il quadrilatero ………………… è un rettangolo e, quindi, i segmenti …….. e ………. sono
………………………… e …………………………; pertanto:
� AB è ……………………… all’asse delle ascisse;
� i segmenti AB e 1 1A B hanno la …………… misura.
Il segmento A1B1 è un segmento dell’asse delle ……………….; quindi la sua lunghezza
è 1 1A B ..................= ; poichè 1 1A B .............= si ottiene ................. .AB ====
Dalle considerazioni precedenti possiamo dedurre che:
Se due punti A ( )A A,x y e B ( )B B,x y del piano cartesiano hanno la stessa ordinata, il segmento
AB è parallelo all’asse delle ascisse e la distanza di A da B (o lunghezza del segmento AB) è data
dal valore assoluto della differenza delle ascisse dei due punti.
In simboli:
y y x x ⇒ A B B Aasse ascisse AB= ΑΒ ⁄⁄= ΑΒ ⁄⁄= ΑΒ ⁄⁄= ΑΒ ⁄⁄ ⇒⇒⇒⇒ = −= −= −= −
A1 B1
Ax Bx
Ay
129
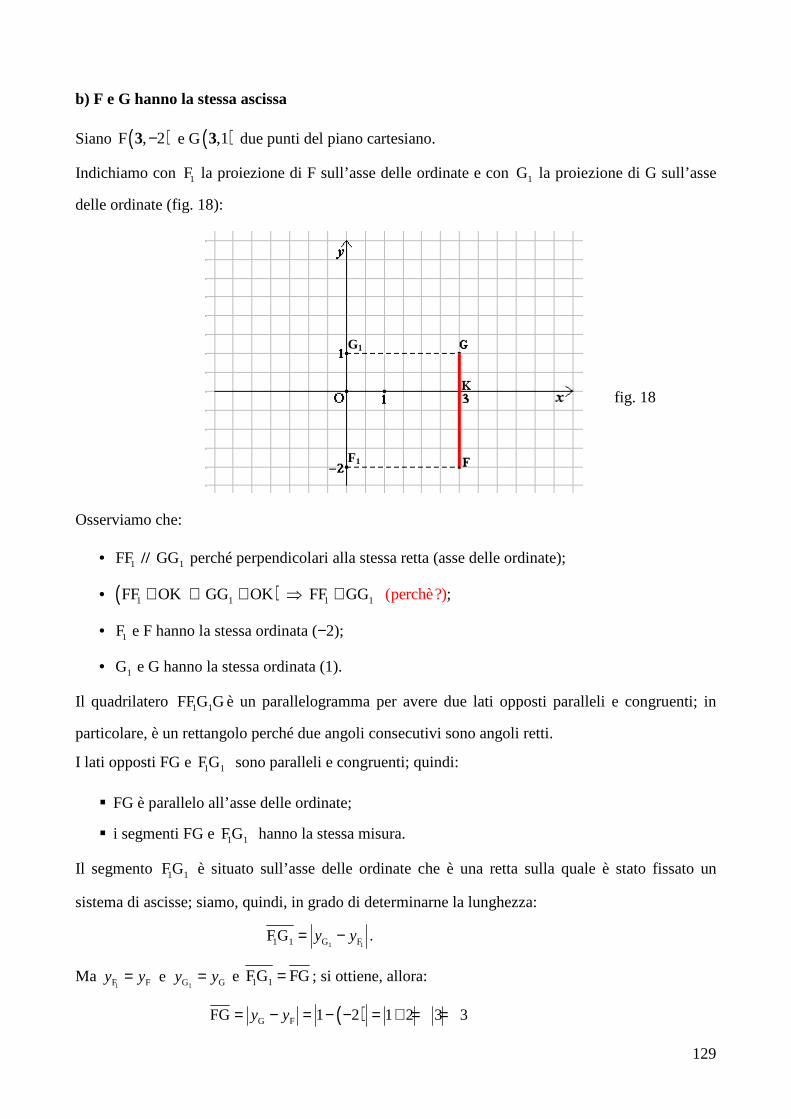
b) F e G hanno la stessa ascissa
Siano ( )F , 2−3 e G( ),13 due punti del piano cartesiano.
Indichiamo con 1F la proiezione di F sull’asse delle ordinate e con 1G la proiezione di G sull’asse
delle ordinate (fig. 18):
fig. 18
Osserviamo che:
• 1FF // 1GG perché perpendicolari alla stessa retta (asse delle ordinate);
• ( )1 1 1 1FF OK GG OK FF (perchè?)GG ;≅ ∧ ≅ ⇒ ≅
• 1F e F hanno la stessa ordinata (−2);
• 1G e G hanno la stessa ordinata (1).
Il quadrilatero 1 1FFG Gè un parallelogramma per avere due lati opposti paralleli e congruenti; in
particolare, è un rettangolo perché due angoli consecutivi sono angoli retti.
I lati opposti FG e 1 1FG sono paralleli e congruenti; quindi:
� FG è parallelo all’asse delle ordinate;
� i segmenti FG e 1 1FG hanno la stessa misura.
Il segmento 1 1FG è situato sull’asse delle ordinate che è una retta sulla quale è stato fissato un
sistema di ascisse; siamo, quindi, in grado di determinarne la lunghezza:
1 11 1 G FFG .y y= −
Ma 1 1F F G Gey y y y= = e 1 1FG FG= ; si ottiene, allora:
( )G FFG 1 2 1 2 3 3y y= − = − − = + = =
F1
G1

130
Proviamo a generalizzare.
Osserva la figura 19, nella quale sono rappresentati i punti ( )A AA ,x y e ( )A BB ,x y .
fig. 19
Completa le seguenti proposizioni:
Il quadrilatero ……………. è un rettangolo e, quindi, i segmenti AB e A1B1 sono
……………………… e ………………………………..; pertanto:
� AB è ……………….. all’asse delle ordinate;
� i segmenti AB e 1 1A B hanno la ……………. misura.
Il segmento A1B1 è un segmento dell’asse delle ………………………..; quindi la sua lunghezza è
1 1A B ..............= ; poichè 1 1A B ...........= si ottiene ................ .AB ====
Dalle considerazioni precedenti possiamo dedurre che:
Se due punti A ( )A A,x y e B ( )B B,x y del piano cartesiano hanno la stessa ascissa, il segmento AB
è parallelo all’asse delle ordinate e la distanza di A da B (o lunghezza del segmento AB) è data
dal valore assoluto della differenza delle ordinate dei due punti.
In simboli:
y y ⇒ B A B Aasse ordinate ABx x= ΑΒ ⁄⁄= ΑΒ ⁄⁄= ΑΒ ⁄⁄= ΑΒ ⁄⁄ ⇒⇒⇒⇒ = −= −= −= −
c) F e G hanno ascissa diversa e ordinata diversa
Siano ( )F 3,2 e ( )G 8,6 due punti di un piano cartesiano.
Indichiamo con s la parallela all’asse delle ascisse passante per F e con t la parallela all’asse delle
ordinate passante per G; sia K = s ∩ t (fig. 20):
A1
B1
Ax
Ay
yB

131
fig. 20
Determiniamo le coordinate di K.
• GK è un segmento parallelo all’asse delle ordinate; l’ascissa di K, allora, è uguale all’ascissa
di G; quindi 8=K Gx x==== .
• FK è un segmento parallelo all’asse delle ascisse; l’ordinata di K, allora, è uguale all’ordinata
di F; quindi 2=K Fy y==== .
Il punto K ha coordinate (8, 2).
Le rette s e t sono perpendicolari tra di loro perché parallele a rette perpendicolari tra di loro
(quali?); il triangolo FGK, dunque, è un triangolo rettangolo dove GF è l’ipotenusa, FK e GK sono
i due cateti.
Applicando il teorema di Pitagora al triangolo FGK, si ottiene:
2 2 2 2 2GF FK GK GF FK GK= + ⇒ = + (**)
Osserviamo che:
FK // asse delle ascisse ⇒ (per quanto detto al punto a) di questo paragrafo) ⇒
⇒ K FFK x x= − ⇒ FK 8 3 5 5= − = =
GK // asse delle ordinate ⇒ (per quanto detto al punto b) di questo paragrafo) ⇒
⇒ K GGK y y= − ⇒ GK 2 6 4 4= − = − =
Sostituiamo le misure, così ottenute, nella relazione (**); si ottiene:
2 2 2 2GF FK GK 5 4 25 16 41. = + = + = + =
132
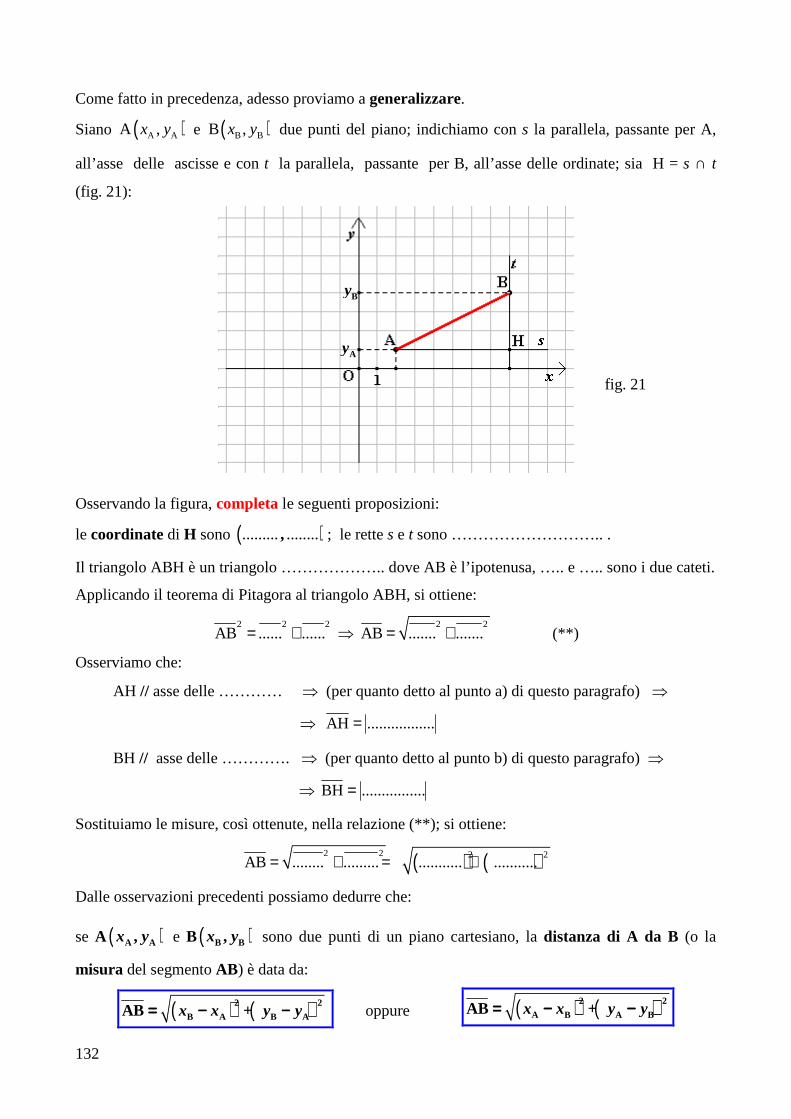
Come fatto in precedenza, adesso proviamo a generalizzare.
Siano ( )A AA ,x y e ( )B BB ,x y due punti del piano; indichiamo con s la parallela, passante per A,
all’asse delle ascisse e con t la parallela, passante per B, all’asse delle ordinate; sia H = s ∩ t
(fig. 21):
fig. 21
Osservando la figura, completa le seguenti proposizioni:
le coordinate di H sono ( )......... ........ , ; le rette s e t sono ……………………….. .
Il triangolo ABH è un triangolo ……………….. dove AB è l’ipotenusa, ….. e ….. sono i due cateti.
Applicando il teorema di Pitagora al triangolo ABH, si ottiene:
2 2 2 2 2AB ...... ...... AB ....... .......= + ⇒ = + (**)
Osserviamo che:
AH // asse delle ………… ⇒ (per quanto detto al punto a) di questo paragrafo) ⇒
⇒ AH .................=
BH // asse delle …………. ⇒ (per quanto detto al punto b) di questo paragrafo) ⇒
⇒ BH ................=
Sostituiamo le misure, così ottenute, nella relazione (**); si ottiene:
( ) ( )2 2 2 2AB ........ ......... ........... ........... = + = +
Dalle osservazioni precedenti possiamo dedurre che:
se A ( )A A,x y e B ( )B B,x y sono due punti di un piano cartesiano, la distanza di A da B (o la
misura del segmento AB) è data da:
( ) ( )2 2
B A B AAB += − −= − −= − −= − −x x y y oppure ( ) ( )2 2
A B A BAB +x x y y= − −= − −= − −= − −
Ay
By

133
Nello schema seguente sono sintetizzati i risultati ottenuti:
se A( )A A,x y e B( )B B,x y sono due punti di un piano cartesiano, si ha:
� =
A BB A
asse ordinate
ABx x
x x
ΑΒ ⁄⁄ΑΒ ⁄⁄ΑΒ ⁄⁄ΑΒ ⁄⁄==== ⇒⇒⇒⇒
−−−−
� −
A BB A
AB asse ascisse
ABy y
y y
⁄⁄⁄⁄⁄⁄⁄⁄==== ⇒⇒⇒⇒
====
� ( ) ( ) ( ) 2 2
A B A B B A B AABx x y y x x y y≠ ∧ ≠≠ ∧ ≠≠ ∧ ≠≠ ∧ ≠ ⇒⇒⇒⇒ = − + −= − + −= − + −= − + −
ATTENZIONE
E’ ovvio che:
• se un segmento è parallelo all’asse delle ascisse, tutti i suoi punti hanno la stessa ordinata;
• se un segmento è parallelo all’asse delle ordinate, tutti i suoi punti hanno la stessa ascissa.
PROVA TU
Determina la lunghezza di ciascuno dei segmenti aventi per estremi le seguenti coppie di punti:
a) F(2, −3) G(3, −3)
b) M(−1, −4) H(−1, −7)
c) T(4, 2) S(−2, 5)
11.8 Punto medio di un segmento nel piano cartesiano
Sia FG un segmento del piano cartesiano; si possono verificare i seguenti casi:
a) FG parallelo all’asse delle ascisse;
b) FG parallelo all’asse delle ordinate;
c) FG non è parallelo ad alcuno degli assi coordinati.
Determiniamo le coordinate del punto medio M del segmento FG nei diversi casi.
a) FG parallelo all’asse delle ascisse
Nella figura 22 sono rappresentati i punti F(2, 4) e G(8, 4); siano M( )M M,x y il punto medio di FG e
F1, G1, M1 le proiezioni, rispettivamente, di F, G, M sull’asse delle ascisse.

134
fig. 22
Osserviamo che:
� FG parallelo all’asse delle ascisse ⇒ M F G 4y y y= = =
� MM 1 parallelo all’asse delle ordinate ⇒ 1M Mx x=
� 1 11 1 1
1
FG GF rettangoloMM asse di FG
MM asse di FG
⇒
⇒ 1M punto medio di 1 1FG
1M , dunque, è il punto medio di un segmento situato sull’asse delle ascisse e, per quanto visto nel
paragrafo 11.5, si ha:
1 1
1
F G F GM M
2 8 10 52 2 2 2
x x x xx x
+ + += = = = = =
In definitiva, le coordinate di M sono (5, 4).
Proviamo a generalizzare: ci proponiamo di trovare una relazione che permetta di determinare le
coordinate del punto medio di un segmento, parallelo all’asse delle ascisse, note le coordinate degli
estremi del segmento stesso.
Nella figura 23 sono rappresentati i punti A( )A A,x y e B( )B A,x y ; siano M( )M M,x y il punto medio
di AB e A1, B1, M1 le proiezioni, rispettivamente, di A, B, M sull’asse delle ascisse.
fig. 23
M1 F1 G1
Ax Bx
F1 F1
M1 A1 B1

135
Riferendoti alla figura, completa le seguenti proposizioni:
� AB …………………… all’asse delle ascisse ⇒ M ..........y =
� MM 1 …………………. all’asse delle ordinate ⇒ 1M........... x=
� 1 11 1 1
1
A B BA ..................MM ............. di A B
MM asse di ............
⇒
⇒ 1M punto medio di ………… .
1M è il punto medio di un segmento situato sull’asse delle ………………….; si ha, allora:
1M M
...... ...... ...... ......2 ......
x x+ += ⇒ =
Dalle osservazioni precedenti, possiamo dedurre che:
se AB è parallelo all’asse delle ascisse, le coordinate del punto medio M di AB sono
;= A BM M A2
x xx y y
++++ ====
b) FG parallelo all’asse delle ordinate
Nella figura 24 sono rappresentati i punti F(4, −2) e G(4, 5); siano M( )M M,x y il punto medio di FG
e F1, G1, M1 le proiezioni, rispettivamente, di F, G, M sull’asse delle ordinate.
(fig. 24)
Osserviamo che:
� FG parallelo all’asse delle ordinate ⇒ M F G 4x x x= = =
� MM 1 parallelo all’asse delle ascisse ⇒ 1M My y=
� 1 11 1 1
1
G GFF rettangoloMM asse di FG
MM asse di FG
⇒
⇒ 1M punto medio di 1 1FG
F1
M 1
G1

136
1M , dunque, è il punto medio di un segmento situato sull’asse delle ordinate e, per quanto visto nel
paragrafo 11.5, si ha:
1 1
1
F G F GM M
2 5 32 2 2 2
y y y yy y
+ + − += = = = =
In definitiva, le coordinate di M sono
34,2
.
Come nel caso precedente, generalizziamo: ci proponiamo di trovare una relazione che permetta di
determinare le coordinate del punto medio di un segmento, parallelo all’asse delle ordinate, essendo
note le coordinate degli estremi del segmento stesso.
Nella figura 25 sono rappresentati i punti A( )A A,x y e B( )A B,x y ; siano M( )M M,x y il punto medio
di AB e A1, B1, M1 le proiezioni, rispettivamente, di A, B, M sull’asse delle ordinate.
(fig. 25)
Riferendoti alla figura, completa le seguenti proposizioni:
� AB ……………. all’asse delle ordinate ⇒ M .......x =
� MM 1 ………….. all’asse delle ascisse ⇒ 1M....... y=
� 1 11
1
A ABB ................MM asse di ............
MM .......... di AB
⇒
⇒ 1M punto medio di ………. .
1M è il punto medio di un segmento situato sull’asse delle ……………..; si ha, allora:
1M M
...... ...... ...... .......2 .....
y y+ += ⇒ =
Dalle osservazioni precedenti, possiamo dedurre che:
se AB è parallelo all’asse delle ascisse, le coordinate del punto medio M di AB sono:
M Ax x==== ; A BM 2
y yy
++++====
A1
B1
M 1
By

137
c) FG non è parallelo ad alcuno degli assi coordinati.
Nella figura 26 sono rappresentati i punti F( )3,2 e G( )12,8 ; siano M( )M M,x y il punto medio di
FG, 1 1 1F , G , M le proiezioni, rispettivamente, di F, G, M sull’asse delle ascisse e 2 2 2F , G , M le
proiezioni, rispettivamente, di F, G, M sull’asse delle ordinate.
fig. 26
Osserviamo che: 1M Mx x= e
2M My y=
1F F 3x x= = e 2F F 2y y= =
1G G 12x x= = e 2G G 8y y= =
Inoltre, i segmenti FF1, MM1 e GG1 sono tra loro paralleli, l’asse delle ascisse e la retta passante
per FG sono due trasversali.
Possiamo, allora, applicare il teorema del fascio di rette parallele:
“Dato un fascio di rette parallele tagliato da due trasversali, a segmenti congruenti su una
trasversale corrispondono segmenti congruenti sull’altra trasversale”.
Al segmento FM, sulla retta passante per FG, corrisponde il segmento F1M1 sull’asse delle ascisse e
al segmento MG, sulla retta passante per FG, corrisponde il segmento M1G1 sull’asse delle ascisse;
poiché FM è congruente a MG, il segmento F1M1 è congruente al segmento M1G1.
In simboli: FM ≅ MG ⇒ F1M1 ≅ M1G1.
M1 è, dunque, il punto medio di F1G1 e, per quanto visto nel paragrafo 11.5, si ha:
1 1
1
F GM
3 12 152 2 2
x xx
+ += = =
G1 F1 M1
F2
M2
G2

138
I segmenti FF2, MM2, GG2 sono tra loro paralleli; l’asse delle ordinate e la retta passante per FG
sono due trasversali.
Applichiamo ancora il teorema del fascio di rette parallele.
Al segmento FM, sulla retta passante per FG, corrisponde il segmento F2M2 sull’asse delle ordinate
e al segmento MG, sulla retta passante per FG, corrisponde il segmento M2G2 sull’asse delle
ordinate; poiché FM è congruente a MG, il segmento F2M2 è congruente al segmento M2G2.
In simboli: FM ≅ MG ⇒ F2M2 ≅ M2G2.
M2, dunque, è il punto medio del segmento F2G2 e, per quanto visto nel paragrafo 11.5, si ha:
2 2
2
F GM
2 8 10 52 2 2
y yy
+ += = = =
Possiamo, allora, dire che le coordinate di M , punto medio di FG, sono
15, 52
.
Adesso generalizziamo: ci proponiamo di trovare una relazione che permetta di determinare le
coordinate del punto medio di un segmento, note le coordinate degli estremi del segmento stesso.
Nella figura 27 sono rappresentati i punti A( )A A,x y e B( )B B,x y ; siano M( )M M,x y il punto medio
di AB, 1 1 1A , B , M le proiezioni, rispettivamente, di F, G, M sull’asse delle ascisse e 2 2 2A , B , M le
proiezioni, rispettivamente, di F, G, M sull’asse delle ordinate.
fig. 27
Riferendoti alla figura, completa le seguenti proposizioni:
� M ......x = , M ......y =
� 1A ......x = ,
2A ......y =
� 1B ......x = ,
2By =
A2
B2
M2
A1 B1 M1
Ay
By
Ax Bx

139
Inoltre, i segmenti AA1, MM1 e BB1 sono tra loro ………………….., l’asse delle ascisse e la retta
passante per AB sono due …………………………….…. .
Possiamo, allora, applicare il teorema del fascio di rette parallele.
Al segmento AM, sulla retta passante per AB, corrisponde il segmento ……….. sull’asse delle
ascisse e al segmento MB, sulla retta passante per AB, corrisponde il segmento ………. sull’asse
delle ascisse; poiché AM è ……………………………. a MB, anche il segmento A1M1 è
…………………..………. al segmento M1B1.
In simboli: AM ≅ ……….. ⇒ ………… ≅ M1B1.
M1 è, dunque, il punto …………….. di A1B1 e, per quanto visto nel paragrafo 11.5, si ha:
1
AM
............. ......2 2
xx
++= =
Prova tu a determinare l’ordinata di M, ripetendo il procedimento seguito per determinare l’ascissa
di M.
M....... ......
2y +=
Dalle osservazioni precedenti, possiamo dedurre che:
le coordinate del punto medio M di un segmento AB di estremi A( )A A,x y e B( )B B,x y sono:
2
+A BM
x xx ==== ; A B
M 2y y
y++++====
PROVA TU
Determina le coordinate del punto medio di ciascuno dei segmenti che hanno per estremi le seguenti
coppie di punti:
a) A( )5,2− ; B( )2,4
b) H 2,43
; S 52,2
−
11.9 Baricentro di un triangolo
Ci proponiamo di determinare una relazione fra le coordinate del baricentro di un triangolo e le
coordinate dei suoi vertici.
A tal proposito, siano E( )2,4 , F( )5,14 e K( )12,6 tre vertici di un triangolo, M il punto medio del
segmento FK e G il baricentro del triangolo.
Per quanto detto nel paragrafo 11.8, le coordinate di M sono: M5 12 17
2 2x += = , M
14 6 102
y += = .

140
Indichiamo con E1, G1, M1 le proiezioni, rispettivamente, di E, G, M sull’asse delle ascisse e con E2,
G2, M2 le proiezioni, rispettivamente, di E, G, M sull’asse delle ordinate (fig. 28):
fig. 28
È ovvio che:
1E E 2x x= = ; 1G Gx x= ;
1M M172
x x= =
2E E 4y y= = ; 2G Gy y= ;
2M M 10y y= =
Ricordiamo, inoltre, che:
il baricentro del triangolo divide ciascuna mediana in due parti tali che quella che contiene il
vertice è doppia dell’altra.
Il segmento EG, dunque, è il doppio del segmento GM: EG ≅ 2GM.
I segmenti EE1, GG1 e MM1 sono tra loro paralleli, l’asse delle ascisse e la retta passante per EM
sono due trasversali.
Possiamo, quindi, applicare il teorema di Talete:
Dato un fascio di rette parallele tagliate da due trasversali, a segmenti proporzionali su una
trasversale corrispondono segmenti proporzionali sulla seconda trasversale.
Al segmento EG, sulla retta passante per EM, corrisponde il segmento E1G1 sull’asse delle ascisse e
al segmento GM, sulla retta passante per EM, corrisponde il segmento G1M1 sull’asse delle ascisse;
poiché EG è il doppio di GM, anche il segmento E1G1 è il doppio del segmento G1M1.
In simboli: EG ≅ 2GM ⇒ E1G1 ≅ 2G1M1 e, passando alle loro misure, 1 1 1 1E G 2G M= .
G1 172
E1 M1
E2
M2
G2

141
Indicate con ( )G G,x y le coordinate di G, formalizziamo la relazione precedente:
1 1 1 1E G 2G M= ⇒ ( )G E M G2x x x x− = − ⇒ G G172 22
x x − = −
Risolviamo l’equazione ottenuta (incognita Gx ):
G G172 22
x x − = −
⇒ G G2 17 2x x− = − ⇒ G3 19x = ⇒ G193
x =
I segmenti EE2, GG2 e MM2 sono tra loro paralleli, l’asse delle ordinate e la retta passante per EM
sono due trasversali.
Applichiamo ancora il teorema di Talete.
Al segmento EG, sulla retta passante per EM, corrisponde il segmento E2G2 sull’asse delle ordinate
e al segmento GM, sulla retta passante per EM, corrisponde il segmento G2M2 sull’asse delle
ordinate; poiché EG è il doppio di GM, anche il segmento E2G2 è il doppio del segmento G2M2.
In simboli: EG ≅ 2GM ⇒ E2G2 ≅ 2G2M2 e, passando alle loro misure, 2 2 2 2E G 2G M= .
Formalizziamo la relazione precedente:
2 2 2 2E G 2G M= ⇒ ( )G E M G2y y y y− = − ⇒ ( )G G4 2 10y y− = −
Risolviamo l’equazione ottenuta (incognita Gy ):
( )G G4 2 10y y− = − ⇒ G G4 20 2y y− = − ⇒ G3 24y = ⇒ G 8y =
In definitiva, le coordinate del baricentro G del triangolo EFK sono: ,
19 83
.
Adesso, generalizziamo: vogliamo determinare una relazione che consenta di determinare le
coordinate del baricentro di un triangolo, note le coordinate dei vertici del triangolo.
fig. 29
MxAx G1 A1 M1
A2
M2
G2

142
Siano A( )A A,x y , B( )B B,x y e C( )C C,x y tre punti di un piano cartesiano, M( )M M,x y il punto
medio del segmento BC e G il baricentro del triangolo ABC.
Indichiamo con A1, G1, M1 le proiezioni, rispettivamente, di A, G, M sull’asse delle ascisse e con
A2, G2, M2 le proiezioni, rispettivamente, di A, G, M sull’asse delle ordinate (fig. 29):
Per quanto detto nel paragrafo 11.8, si ha:
M...... ......
.....x += ; M
...... ...........
y +=
Riferendoti alla fig. 29, completa le seguenti relazioni:
1A ......x = ; 1G .......x = ;
1M...... ............
.....x += =
2A ......y = ; 2G ......y = ;
2M...... ............
......y += =
Per la proprietà del ………, il segmento AG è il ……………. del segmento GM: AG ≅…..GM.
Inoltre, i segmenti AA1, GG1 e MM1 sono tra loro ……………………, l’asse delle ascisse e la retta
passante per AM sono due ………………………; possiamo, allora, applicare il Teorema di
………………………. .
Al segmento AG, sulla retta passante per AM, corrisponde il segmento ………. sull’asse delle
ascisse e al segmento GM, sulla retta passante per AM, corrisponde il segmento …………. sull’asse
delle ascisse; poiché AG è il ………… di GM, anche il segmento A1G1 è il doppio del segmento
…………... .
In simboli:
AG ≅ 2……… ⇒ ……… ≅ 2G1M1 e, passando alle loro misure, 1 1A G 2.........= .
Indicate con ( )G G,x y le coordinate di G, formalizziamo la relazione precedente:
1 1....... 2G M= ⇒ ( )G A 2 ..... ......x x− = − ⇒ G A...... ......2 ......
2x x + − = −
Risolviamo l’equazione ottenuta (incognita Gx ):
B CG A G2
2
x xx x x
+ − = −
⇒ B C G..... ..... 2x x x− = + − ⇒ G..... ..... ..... .....x = + + ⇒
⇒ G..... ..... .....
3x + +=
Prova tu a determinare l’ordinata di G, ripetendo il procedimento seguito per determinarene
l’ascissa.
G....... ...... ......
3y + +=

143
Dalle osservazioni precedenti, possiamo dedurre che:
le coordinate del baricentro G di un triangolo di vertici A ( )A A,x y , B ( )B B,x y e C ( )C C,x y sono:
+ +A B CG 3
x x xx ==== ;
+A B CG 3
y y yy
++++====
PROVA TU
Determina le coordinate del baricentro di un triangolo avente per vertici i seguenti punti:
a) R( )3, 1− − , S( )0,2 , T( )4, 3−
b) F 2, 53
−
, K 13,2
−
, N( )5, 3−
11.10 Funzioni e loro rappresentazione grafica
Ricordiamo la definizione di funzione (par. 4.5):
dati due insiemi A e B, una relazione ℜℜℜℜ da A verso B è una funzione se e solo se ogni elemento di
A ha una sola immagine in B.
In simboli:
ℜℜℜℜ: A →→→→ B funzione ⇔⇔⇔⇔ ∀∀∀∀ x ∈∈∈∈ A, ∃∃∃∃ y ∈∈∈∈ B / x ℜℜℜℜ y
Ricordiamo, inoltre, che le funzioni, in generale, sono indicate con le lettere minuscole
dell’alfabeto: f, g, h, a, ……
Se gli insiemi A e B sono insiemi numerici, la funzione è detta numerica ed il generico elemento x
di A è chiamato variabile indipendente, il generico elemento y di B è chiamato variabile
dipendente. L’immagine (o corrispondente) di un elemento di A tramite una funzione f, viene
indicato, solitamente, con la scrittura f (x).
Il grafico di una funzione numerica f da A verso B è l’insieme Gf = ( ){ }, ( ) / ( )x f x x A f x B∈ ∧ ∈ ;
la coppia ( ), ( )x f x può essere, allora, interpretata come coppia di coordinate cartesiane di un
punto nel piano e, dunque, il grafico di una funzione può essere rappresentato come insieme di
punti nel piano cartesiano: il primo elemento della coppia rappresenta l’ascissa, il secondo
l’ ordinata.
Ad esempio, dati gli insiemi A = { }3, 1,1, 3− − e B = { }/ 0 4y y∈ ≤ ≤Q , sia f una funzione da A
verso B così definita: ( ) 3 1xf xx+= .

144
Per determinare le coppie del grafico di f possiamo costruire una tabella formata da due colonne e
da un numero di righe pari al numero degli elementi di A: nella prima colonna riportiamo gli
elementi di A, nella seconda le loro immagini (fig. 31a); oppure possiamo costruire una tabella
formata da due righe e da un numero di colonne pari al numero degli elementi di A: nella prima riga
riportiamo gli elementi di A, nella seconda le loro immagini (fig. 31b).
fig. 31b
fig. 31a
La rappresentazione tabulare di Gf è, dunque, la seguente:
Gf = ( ) ( )8 103, , 1,2 , 1,4 , 3,3 3
− −
Ad ogni elemento di Gf corrisponde, allora, un punto del piano cartesiano.
I punti azzurri della fig. 32 costituiscono la rappresentazione grafica della funzione f.
fig. 32
� Rappresentiamo, adesso, la funzione g : R → R / g(x) = 2 1x − .
Costruiamo, dunque, una tabella con due righe: nella prima riportiamo alcuni numeri reali scelti
a piacere e nella seconda le loro immagini tramite la funzione g.
x f (x)
−3 83
−1 2
1 4
3 103
x −3 −1 1 3
f (x) 83
2 4 103
x −3 −2 −1 0 1 2 3
f(x) 8 3 0 −1 0 3 8
83
103

145
Sia G1 = ( ) ( ) ( ) ( ) ( ) ( ) ( ){ }3,8 , 2,3 , 1,0 , 0, 1 , 1,0 , 2,3 , 3,8− − − − ; è facile intuire che G1 ⊂ Gf.
Osserva le figure 33a e 33b:
fig. 33a fig. 33b
Nella fig. 33a sono rappresentati gli elementi ( ), ( )x g x ∈ G1.
Poichè il dominio della funzione g è l’insieme dei numeri reali, tutti i punti dell’asse delle ascisse
hanno una immagine e, quindi, possiamo unire i punti rappresentati in precedenza con una linea. La
linea azzurra della fig. 33b costituisce la rappresentazione grafica della funzione g.
� Rappresentiamo la funzione h(x): Q − {−1} → Q / y = 2 11
xx
−+
.
Costruiamo la tabella che consente di determinare alcuni elementi del grafico di h(x).
Sia G2 = ( ) ( ) ( )7 5 1 1 53, , , 4 2,5 , 0, 1 , ,0 , 1, 2,1 , 3,2 2 2 2 4
− − − −
; è ovvio che G2 ⊂ Gh.
Nella figura 34a è rappresentato l’insieme G2.
x −3 52
− −2 0 12
1 2 3
y = h(x) 72
4 5 −1 0 12
1 54

146
Sappiamo che esistono punti della retta che non hanno come corrispondente un numero razionale e,
di conseguenza, esistono punti del piano cartesiano che non hanno come immagine una coppia di
numeri razionali. Non è, allora, corretto rappresentare la funzione h unendo i punti di G2 con una
linea, così come abbiamo fatto con la funzione g dell’esempio precedente.
Tuttavia, poiché fra due numeri razionali vi sono infiniti numeri razionali, si conviene anche in
questo caso, di rappresentare la funzione h unendo con una linea i punti di G2 (fig. 34b).
fig. 34a fig. 34b
OSSERVAZIONI
a) La rappresentazione grafica di una funzione, avente per dominio un insieme infinito (le funzioni
g e h degli esempi precedenti), ottenuta unendo con una linea alcuni punti del grafico della
funzione, è, generalmente, una rappresentazione approssimata della funzione stessa dal momento
che non siamo in grado di determinare le immagini di tutti gli elementi del suo dominio.
b) Consideriamo le funzioni g (abbiamo sostituito g(x) con y) e h degli esempi precedenti:
(�) y = 2 1x − ; (��) y = 2 11
xx
−+
Da un punto di vista formale, queste scritture sono delle equazioni in due variabili (x e y);
applicando i principi di equivalenza, possono essere ridotte a forma normale ottenendo:
(�) 2 1 0x y− − = ; (��) 2x – xy – y – 1 = 0
72
54
12
12
− 52
72
54
− 52
12
12

147
La stessa funzione, dunque, può essere espressa in due modi diversi:
1) da un’equazione in cui al primo membro c’è soltanto la variabile y e al secondo membro
una espressione il cui valore dipende da x; in generale y = f (x);
2) da un’equazione ridotta a forma normale e, quindi, in generale P(x, y) = 0.
Nel caso 1) si dice che la funzione è espressa da una equazione in forma esplicita; nel caso 2) si
dice che la funzione è espressa da una equazione in forma implicita .
Come al solito, non mancano casi particolari: esistono funzioni espresse da equazioni nelle quali
è presente una sola delle due variabili; esse possono essere considerate sempre equazioni in due
variabili avente nullo il coefficiente della variabile non presente.
Ad esempio: x = 1; y2 – 1 = 0.
Parleremo, indifferentemente, di rappresentazione dell’equazione y = f (x) o di rappresentazione
della funzione (relazione) di equazione y = f (x) o di grafico della funzione y = f (x).
c) Alle funzioni g e h e, quindi alle loro equazioni, è stato possibile associare una curva del piano
cartesiano.
Questa proprietà è più generale: ogni equazione in due variabili (che ha insieme soluzione non
vuoto) può essere rappresentata nel piano cartesiano e la sua rappresentazione grafica è una
linea, curva o retta, oppure un insieme di punti.
Viceversa, ogni linea del piano cartesiano è la rappresentazione grafica di una equazione.
Mentre è abbastanza semplice associare ad una equazione una linea del piano (è sufficiente
rappresentarla) , non sempre è agevole associare ad una linea del piano una equazione.
Ma, attenzione: la stessa equazione può avere rappresentazioni grafiche diverse.
Facciamo un esempio.
Consideriamo una relazione da R verso Z espressa dall’equazione x2 + y2 – 4 = 0; il suo grafico è,
allora, G = ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ){ }2,0 , 2,0 , 0, 2 , 0,2 , 3,1 , 3,1 , 3, 1 , 3, 1− − − − − − ; i punti azzurri
della figura 35a costituiscono la sua rappresentazione grafica.
fig.35a
3 3−−−−

148
Consideriamo, adesso, la relazione da R verso R espressa dalla stessa x2 + y2 – 4 = 0; la sua
rappresentazione grafica è data dalla linea azzurra della figura 35b.
fig. 35b
d) Data una equazione, siamo in grado di determinare alcuni punti del piano che appartengono alla
rappresentazione grafica dell’equazione. Viceversa, dato un punto del piano come fare per
stabilire se appartiene o no alla rappresentazione grafica dell’equazione?
Osserviamo che i punti che appartengono alla linea che rappresenta una funzione (o relazione)
sono tali che la coppia formata dalle loro coordinate è una soluzione dell’equazione che esprime
la funzione (relazione).
Allora, per stabilire se un punto del piano appartiene alla rappresentazione grafica di una
funzione (relazione), è sufficiente stabilire se le coordinate del punto del piano verificano
l’equazione che esprime la funzione (relazione).
Ad esempio:
a) stabiliamo se il punto P(−2,1) appartiene alla rappresentazione grafica della funzione di
equazione y = 2x2 – x – 4.
Sostituiamo le coordinate di P nell’equazione che esprime la funzione; si ottiene:
1 = 2(−2)2 – (−2) – 4 ⇒ 1 = 8 + 2 – 4 ⇒ 1 = 6
L’uguaglianza ottenuta è chiaramente FALSA, quindi la coppia (−2,1) non è una soluzione
dell’equazione e, pertanto, il punto P non appartiene alla rappresentazione della funzione
data.
b) stabiliamo se il punto S(1, −3) appartiene alla rappresentazione grafica della funzione di
equazione y = 2x2 – x – 4.
Sostituiamo le coordinate di S nell’equazione che esprime la funzione ; si ottiene:
−3 = 2(1)2 – 1 – 4 ⇒ −3 = 2 – 1 – 4 ⇒ −3 = −3
L’uguaglianza ottenuta è VERA, quindi la coppia (1, −3) è una soluzione dell’equazione e,
pertanto, il punto S appartiene alla rappresentazione grafica della funzione data.
3−−−− 3

149
PROVA TU
1) Rappresenta, nel piano cartesiano, la funzione
h: A → B / h(x) = 2 12
x −
essendo A = { }3, 1,1, 3, 5− − e B = { }/ 5 14y Z y∈ − ≤ < .
2) Rappresenta, nel piano cartesiano, la funzione g di equazione y = 2x – 5 avente per dominio e
codominio l’insieme dei numeri reali.
3) Rappresenta, nel piano cartesiano, la funzione g di equazione y = 2x – 5 avente per dominio
l’insieme { }/ 3 9A x x= ∈ ≤ <N e codominio l’insieme dei numeri naturali
4) Rappresenta nel piano cartesiano la funzione k di equazione y = x2 + 1 avente per dominio e
codominio l’insieme dei numeri razionali.
5) Rappresenta nel piano cartesiano la funzione k di equazione y = x2 + 1 avente per dominio
l’insieme { }/ 3 9D x x= ∈ − < <Z e codominio l’insieme dei numeri interi.
6) Stabilisci, per ciascuna delle seguenti funzioni, se i punti a fianco indicati appartengono alla
sua rappresentazione grafica:
a) 2 1xyx+= A( )52,
2− ; D( )1, 2− − ; H( )103,
3
b) 5 0x y− + = F( )2, 7− ; S( )2,7− ; M( )2,2
c) 2 0x y+ = B( )1,− − 2 ; K( )1 ,12
− ; T( )1, 2
11.11 Equazione di una retta parallela agli assi cartesiani
Nel precedente paragrafo abbiamo detto che, se è abbastanza agevole associare ad una equazione la
sua rappresentazione grafica, non sempre è possibile associare ad una linea (retta o curva) del piano
la sua equazione.
Ricordiamo, inoltre, che l’equazione di una funzione esprime una relazione fra le coordinate dei
punti del piano che appartengono alla rappresentazione grafica della funzione stessa.
Così, se l’equazione di una funzione è y = 2x, la sua rappresentazione grafica è una linea formata
dai punti del piano cartesiano per i quali l’ordinata è il doppio dell’ascissa.
In questo paragrafo vogliamo provare ad associare a particolari linee del piano una equazione.
Esaminiamo la linea più semplice del piano: la retta.
Due rette particolari del piano cartesiano sono i due assi cartesiani: l’asse delle ascisse e l’asse
delle ordinate. E’ possibile associare a ciascuna di esse una equazione?
150
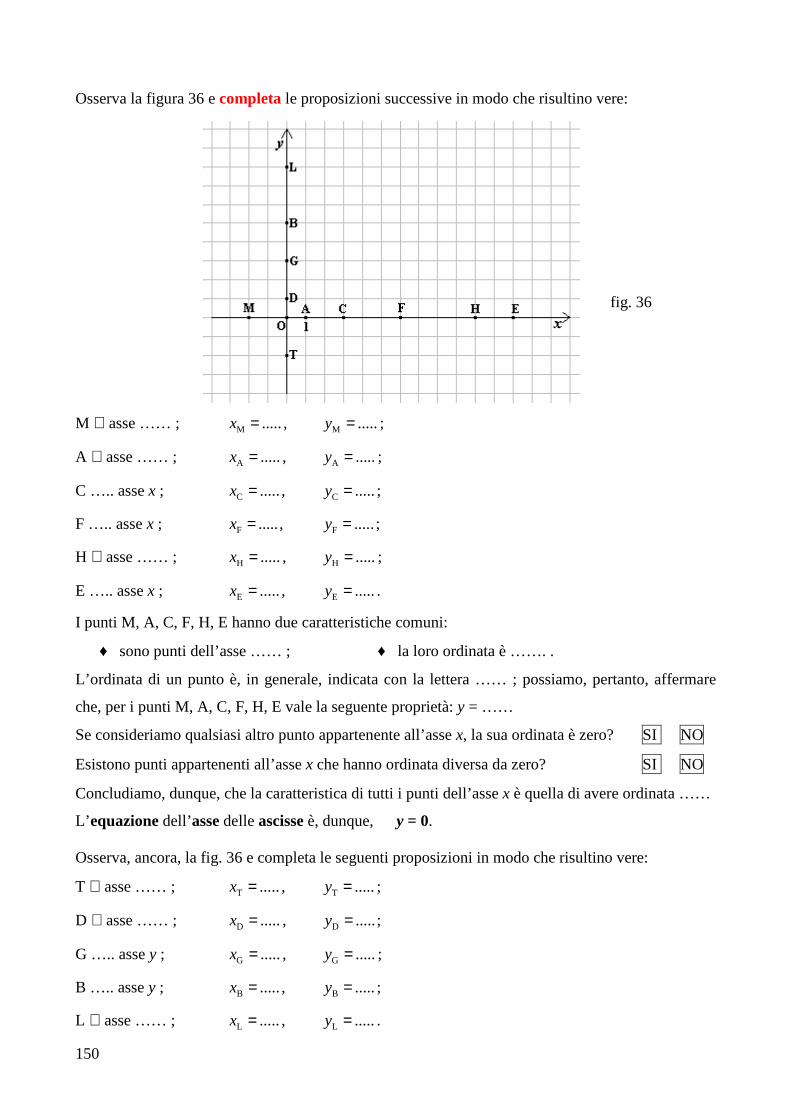
Osserva la figura 36 e completa le proposizioni successive in modo che risultino vere:
fig. 36
M ∈ asse …… ; M .....x = , M .....y = ;
A ∈ asse …… ; A .....x = , A .....y = ;
C ….. asse x ; C .....x = , C .....y = ;
F ….. asse x ; F .....x = , F .....y = ;
H ∈ asse …… ; H .....x = , H .....y = ;
E ….. asse x ; E .....x = , E .....y = .
I punti M, A, C, F, H, E hanno due caratteristiche comuni:
♦ sono punti dell’asse …… ; ♦ la loro ordinata è ……. .
L’ordinata di un punto è, in generale, indicata con la lettera …… ; possiamo, pertanto, affermare
che, per i punti M, A, C, F, H, E vale la seguente proprietà: y = ……
Se consideriamo qualsiasi altro punto appartenente all’asse x, la sua ordinata è zero? SI NO
Esistono punti appartenenti all’asse x che hanno ordinata diversa da zero? SI NO
Concludiamo, dunque, che la caratteristica di tutti i punti dell’asse x è quella di avere ordinata ……
L’ equazione dell’asse delle ascisse è, dunque, y = 0.
Osserva, ancora, la fig. 36 e completa le seguenti proposizioni in modo che risultino vere:
T ∈ asse …… ; T .....x = , T .....y = ;
D ∈ asse …… ; D .....x = , D .....y = ;
G ….. asse y ; G .....x = , G .....y = ;
B ….. asse y ; B .....x = , B .....y = ;
L ∈ asse …… ; L .....x = , L .....y = .

151
I punti T, D, G, B, L hanno due caratteristiche comuni:
� sono punti dell’asse …… ;
� la loro ascissa è ……. .
L’ascissa di un punto è, in generale, indicata con la lettera …… ; possiamo, pertanto, affermare che,
per i punti T, D, G, B, L vale la seguente proprietà: x = ……
Se consideriamo qualsiasi altro punto appartenente all’asse y, la sua ascissa è zero? SI NO
Esistono punti appartenenti all’asse y che hanno ascissa diversa da zero? SI NO
Possiamo, allora, concludere che la caratteristica di tutti i punti dell’asse y è quella di avere ascissa
…… .
L’ equazione dell’asse delle ordinate è, dunque, x = 0.
Osserva la figura 37:
fig. 37
Completa le seguenti proposizioni in modo che esse risultino vere:
� A ∈ ….. ; A .....x = , A .....y = ;
Z ∈ ..… ; Z .....x = , Z .....y = ;
T ∈ ..… ; T .....x = , T .....y = .
I punti A, Z, T hanno due caratteristiche comuni:
� sono punti della retta …… ;
� la loro ordinata è ……. .
L’ordinata di un punto è, in generale, indicata con la lettera …… ; possiamo, pertanto, affermare
che, per i punti A, Z, T vale la seguente proprietà: y = ……
Se consideriamo qualsiasi altro punto appartenente alla retta v, la sua ordinata è −2? SI NO
Esistono punti appartenenti alla retta v che hanno ordinata diversa da −2? SI NO

152
Possiamo, allora, concludere che la caratteristica di tutti i punti della retta v è quella di avere
ordinata uguale a …… .
L’ equazione della retta v è, dunque, y = −−−−2.
� S ∈ ….. ; S .....x = , S .....y = ;
M ∈ ..… ; M .....x = , M .....y = ;
B ∈ ..… ; B .....x = , B .....y = .
I punti S, M, B hanno due caratteristiche comuni:
� sono punti della retta …… ;
� la loro ordinata è ……. .
L’ordinata di un punto è, in generale, indicata con la lettera …… ; possiamo, pertanto, affermare
che, per i punti S, M, B vale la seguente proprietà: y = ……
Se consideriamo qualsiasi altro punto appartenente alla retta t, la sua ordinata è 3? SI NO
Esistono punti appartenenti alla retta t che hanno ordinata diversa da 3? SI NO
Possiamo, allora, concludere che la caratteristica di tutti i punti della retta t è quella di avere
ordinata uguale a …… .
L’ equazione della retta t è, dunque, y = 3.
� P ∈ ….. ; P .....x = , P .....y = ;
D ∈ ..… ; D .....x = , D .....y = ;
H ∈ ..… ; H .....x = , B .....y = ;
I punti P, D, H hanno due caratteristiche comuni:
� sono punti della retta …… ;
� la loro ordinata è ……. .
L’ordinata di un punto è, in generale, indicata con la lettera …… ; possiamo, pertanto, affermare
che, per i punti P, D, H vale la seguente proprietà: y = ……
Se consideriamo qualsiasi altro punto appartenente alla retta s, la sua ordinata è 5? SI NO
Esistono punti appartenenti alla retta s che hanno ordinata diversa da 5? SI NO
Possiamo, allora, concludere che la caratteristica di tutti i punti della retta s è quella di avere
ordinata uguale a …… .
L’ equazione della retta s è, dunque, y = 5.

153
Le rette v, s, t sono ……………………… all’asse delle ……………. .
Le equazione delle rette v, s, t sono dello stesso tipo, cioè sono del tipo y = “numero”.
I punti appartenenti ad una qualsiasi altra retta, parallela all’asse delle ascisse, hanno SI NO
tutti la stessa ordinata?
Esistono rette parallele all’asse delle ascisse i cui punti abbiano ordinate diverse tra SI NO
loro?
Possiamo, allora, concludere che la caratteristica dei punti appartenenti ad una retta parallela
all’asse delle ascisse è quella di avere la ................... ordinata.
In generale, quindi, l’equazione di una retta parallela all’asse delle ascisse è y = k (k ∈ R).
Osserva la figura 38:
fig. 38
Completa le seguenti proposizioni in modo che esse risultino vere:
� R ∈ ….. ; R .....x = , R .....y = ;
K ∈ ..… ; K .....x = , K .....y = ;
C ∈ ..… ; C .....x = , C .....y = .
I punti R, K, C hanno due caratteristiche comuni:
� sono punti della retta …… ;
� la loro ascissa è ……. .
L’ascissa di un punto è, in generale, indicata con la lettera …… ; possiamo, pertanto, affermare
che, per i punti R, K, C vale la seguente proprietà: x = ……
Se consideriamo qualsiasi altro punto appartenente alla retta a, la sua ascissa è −3? SI NO
Esistono punti appartenenti alla retta a che hanno ascissa diversa da −3? SI NO

154
Possiamo, allora, concludere che la caratteristica di tutti i punti della retta a è quella di avere
ascissa uguale a …… .
L’ equazione della retta a è, dunque, x = −−−−3.
� L ∈ ….. ; L .....x = , L .....y = ;
N ∈ ..… ; N .....x = , N .....y = ;
W ∈ ..… ; W .....x = , W .....y = .
I punti L, N, W hanno due caratteristiche comuni:
� sono punti della retta …… ;
� la loro ascissa è ……. .
L’ascissa di un punto è, in generale, indicata con la lettera …… ; possiamo, pertanto, affermare
che, per i punti L, N, W vale la seguente proprietà: x = ……
Se consideriamo qualsiasi altro punto appartenente alla retta b, la sua ascissa è 3? SI NO
Esistono punti appartenenti alla retta b che hanno ascissa diversa da 3? SI NO
Possiamo, allora, concludere che la caratteristica di tutti i punti della retta b è quella di avere
ascissa uguale a …… .
L’ equazione della retta b è, dunque, x = 3.
� Q ∈ ….. ; Q .....x = , Q .....y = ;
G ∈ ..… ; G .....x = , G .....y = ;
E ∈ ..… ; E .....x = , E .....y = ;
I punti Q, G, E hanno due caratteristiche comuni:
� sono punti della retta …… ;
� la loro ascissa è ……. .
L’ascissa di un punto è, in generale, indicata con la lettera …… ; possiamo, pertanto, affermare
che, per i punti Q, G, E vale la seguente proprietà: x = ……
Se consideriamo qualsiasi altro punto appartenente alla retta c, la sua ascissa è 9? SI NO
Esistono punti appartenenti alla retta c che hanno ascissa diversa da 9? SI NO
Possiamo, allora, concludere che la caratteristica di tutti i punti della retta c è quella di avere
ascissa uguale a …… .
L’ equazione della retta c è, dunque, x = 9.
155
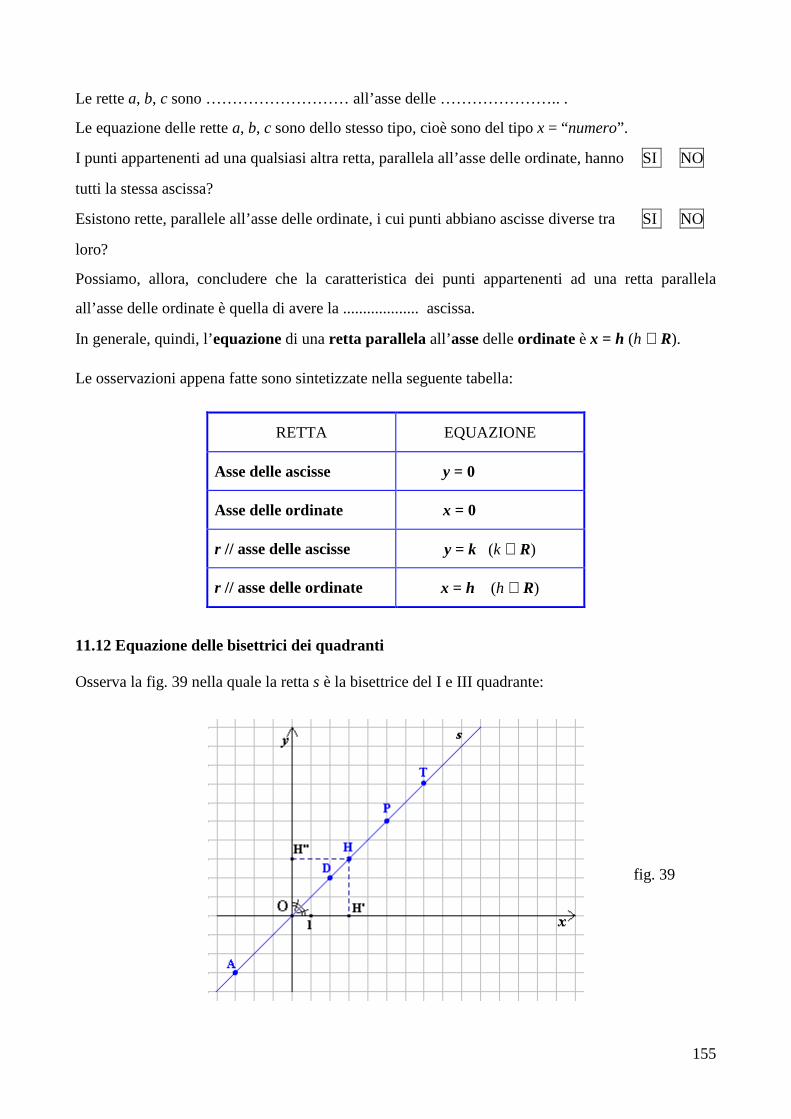
Le rette a, b, c sono ……………………… all’asse delle ………………….. .
Le equazione delle rette a, b, c sono dello stesso tipo, cioè sono del tipo x = “numero”.
I punti appartenenti ad una qualsiasi altra retta, parallela all’asse delle ordinate, hanno SI NO
tutti la stessa ascissa?
Esistono rette, parallele all’asse delle ordinate, i cui punti abbiano ascisse diverse tra SI NO
loro?
Possiamo, allora, concludere che la caratteristica dei punti appartenenti ad una retta parallela
all’asse delle ordinate è quella di avere la ................... ascissa.
In generale, quindi, l’equazione di una retta parallela all’asse delle ordinate è x = h (h ∈ R).
Le osservazioni appena fatte sono sintetizzate nella seguente tabella:
RETTA EQUAZIONE
Asse delle ascisse y = 0
Asse delle ordinate x = 0
r // asse delle ascisse y = k (k ∈ R)
r // asse delle ordinate x = h (h ∈ R)
11.12 Equazione delle bisettrici dei quadranti
Osserva la fig. 39 nella quale la retta s è la bisettrice del I e III quadrante:
fig. 39
156
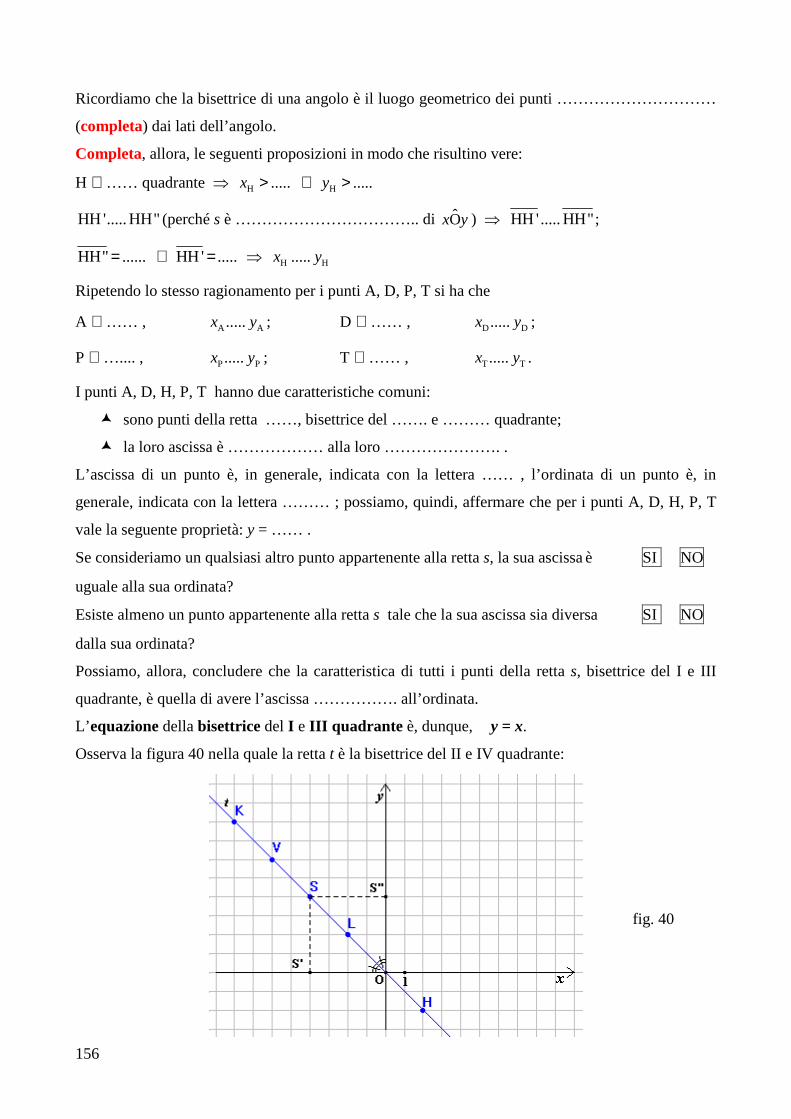
Ricordiamo che la bisettrice di una angolo è il luogo geometrico dei punti …………………………
(completa) dai lati dell’angolo.
Completa, allora, le seguenti proposizioni in modo che risultino vere:
H ∈ …… quadrante ⇒ H .....x > ∧ H .....y >
HH'.....HH" (perché s è …………………………….. di Ox y ) ⇒ HH'..... HH" ;
HH" ...... = ∧ HH' ..... = ⇒ H H.....x y
Ripetendo lo stesso ragionamento per i punti A, D, P, T si ha che
A ∈ …… , A A.....x y ; D ∈ …… , D D.....x y ;
P ∈ ….... , P P.....x y ; T ∈ …… , T T.....x y .
I punti A, D, H, P, T hanno due caratteristiche comuni:
� sono punti della retta ……, bisettrice del ……. e ……… quadrante;
� la loro ascissa è ……………… alla loro …………………. .
L’ascissa di un punto è, in generale, indicata con la lettera …… , l’ordinata di un punto è, in
generale, indicata con la lettera ……… ; possiamo, quindi, affermare che per i punti A, D, H, P, T
vale la seguente proprietà: y = …… .
Se consideriamo un qualsiasi altro punto appartenente alla retta s, la sua ascissa è SI NO
uguale alla sua ordinata?
Esiste almeno un punto appartenente alla retta s tale che la sua ascissa sia diversa SI NO
dalla sua ordinata?
Possiamo, allora, concludere che la caratteristica di tutti i punti della retta s, bisettrice del I e III
quadrante, è quella di avere l’ascissa ……………. all’ordinata.
L’ equazione della bisettrice del I e III quadrante è, dunque, y = x.
Osserva la figura 40 nella quale la retta t è la bisettrice del II e IV quadrante:
fig. 40

157
Ricordando, ancora una volta, che i punti della bisettrice di un angolo sono ………………………...
dai lati dell’angolo, completa le seguenti proposizioni in modo che risultino vere:
S ∈ …… quadrante ⇒ S .....x < ∧ S .....y >
SS'.....SS" (perché s è …………………………….. di Ox y ) ⇒ SS'.....SS" ;
SS" ....... = ∧ SS' ....... = ;
ma S .....x < ⇒ S ......x = − ; S .....y > ⇒ S ......y = ;
si ottiene, dunque:
SS'.....SS" ⇒ S S.....y x −
Ripetendo lo stesso ragionamento per i punti H, L, V, K si ha che
H ∈ …… , H H.....y x − ; L ∈ …… , L L.....y x − ;
V ∈ ….... , V V.....y x − ; K ∈ …… , K K.....y x − .
I punti H, L, S, V, K hanno due caratteristiche comuni:
� sono punti della retta ……, bisettrice del ……. e ……… quadrante;
� la loro ascissa è l’……………… della loro …………………. .
L’ascissa di un punto è, in generale, indicata con la lettera …… , l’ordinata di un punto è, in
generale, indicata con la lettera ……… ; possiamo, quindi, affermare che per i punti H, L, S, V, K
vale la seguente proprietà: y = …… .
Se consideriamo un qualsiasi altro punto appartenente alla retta t, la sua ascissa è SI NO
uguale all’opposto della sua ordinata?
Esiste almeno un punto appartenente alla retta t tale che la sua ascissa non sia SI NO
uguale all’opposto della sua ordinata?
Possiamo, allora, concludere che la caratteristica di tutti i punti della retta t, bisettrice del II e IV
quadrante, è quella di avere l’ascissa uguale all’……………….. della sua ordinata.
L’ equazione della bisettrice del II e IV quadrante è, dunque, y = −−−− x.
Le osservazioni appena fatte sono sintetizzate nella seguente tabella:
RETTA EQUAZIONE
Bisettrice del I e III quadrante y = x
Bisettrice del II e IV quadrante y = −−−− x

158
11.13 Equazione di una generica retta passante per l’origine degli assi
Siano A, D, H punti della retta r (figg. 41a e 41b).
fig.41a
fig. 41b
Completa:
• A .....x = , A .....y = ⇒ A(…... , …...).
esiste una relazione fra le coordinate di A? SI NO
Se hai risposto SI, qual è la relazione? ........ = ……..
• D .....x = , D .....y = ⇒ D(…... , …...);
esiste una relazione fra le coordinate di D? SI NO
Se hai risposto SI, qual è la relazione? ........ = ……..
• H .....x = , H .....y = ⇒ H(…... , …...);
esiste una relazione fra le coordinate di H? SI NO
Se hai risposto SI, qual è la relazione? ........ = ……..
Le coordinate dei punti A, D, H hanno, dunque, una stessa caratteristica: l’ordinata è ....………..
dell’ascissa. In simboli, ….. = …… .
Possiamo, allora, congetturare che fra le coordinate dei punti della retta r esista la stessa relazione.
Indichiamo con (x, y) le coordinate di un generico punto C della retta r (fig. 41b). Completa:
DD ' è …………………… a CC', quindi il triangolo ODD' è simile al triangolo OCC'. I due
triangoli, allora, hanno i lati omologhi in proporzione:
DD ' .......OD' .......
= ⇒ DD' .......OD' .......
= (�)
159
Ma, DD' = …… , OD' = ……. ;
CC' = ……. , OC' = ……. .
Sostituendo nella (�) le misure determinate, si ottiene:
DD' .......OD' .......
= ⇒ .....
2 .....y= ⇒ y = ………..
La relazione che esiste fra le coordinate del punto C è, dunque, …………… alla relazione che
esiste fra le coordinate dei punti A, D, H.
Poiché C è un punto qualsiasi di r, possiamo dire che la caratteristica di tutti i punti di r è quella di
avere l’ordinata …………. dell’ascissa; l’ equazione della retta r è : y = ………. .
Le coordinate del punto O(0,0), origine degli assi, sono soluzione dell’equazione y = 2x? SI NO
Possiamo, allora, dire che O(0, 0) …………………… alla retta r .
In sintesi:
� l’ equazione della retta r è: y = 2x;
� la retta r passa per l’origine degli assi.
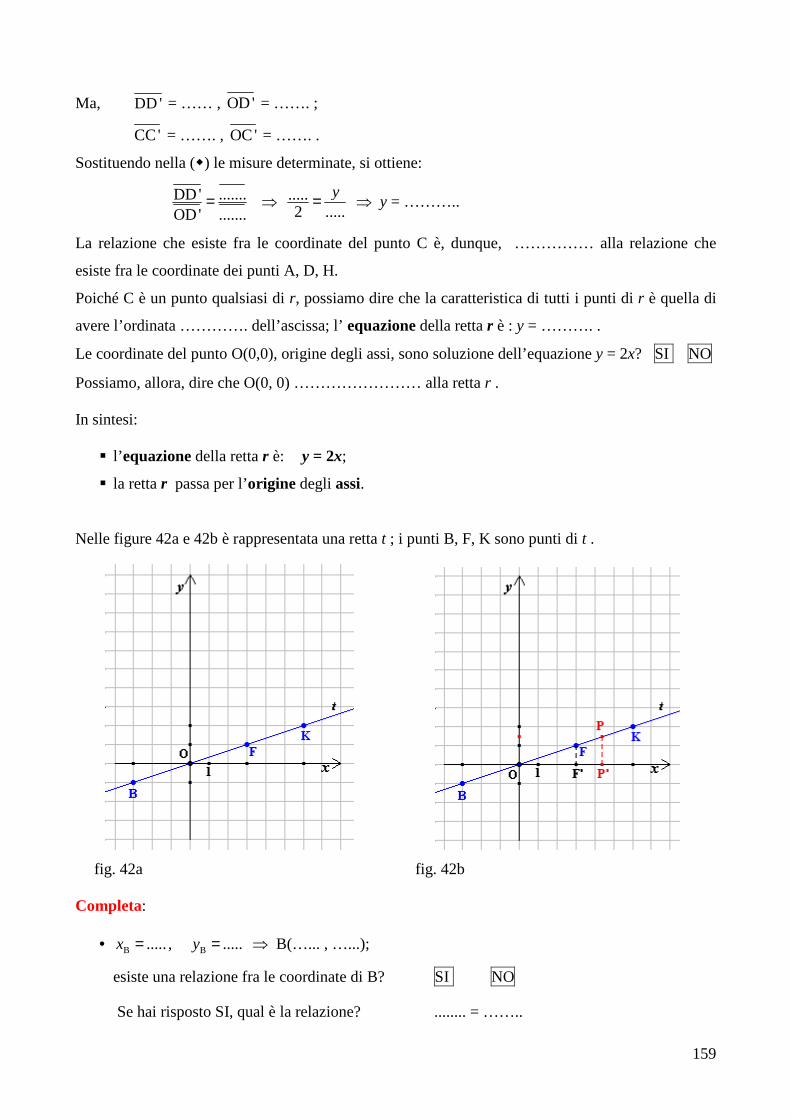
Nelle figure 42a e 42b è rappresentata una retta t ; i punti B, F, K sono punti di t .
fig. 42a fig. 42b
Completa:
• B .....x = , B .....y = ⇒ B(…... , …...);
esiste una relazione fra le coordinate di B? SI NO
Se hai risposto SI, qual è la relazione? ........ = ……..

160
• F .....x = , F .....y = ⇒ F(…... , …...);
esiste una relazione fra le coordinate di F? SI NO
Se hai risposto SI, qual è la relazione? ........ = ……..
• K .....x = , K .....y = ⇒ K(…... , …...).
esiste una relazione fra le coordinate di K? SI NO
Se hai risposto SI, qual è la relazione? ........ = ……..
Le coordinate dei punti B, F, K hanno, dunque, una stessa caratteristica: l’ordinata è
....…………….. dell’ascissa. In simboli, ….. = …… .
Possiamo, allora, congetturare che fra le coordinate dei punti della retta t esista la stessa relazione.
Indichiamo con (x, y) le coordinate di un generico punto P della retta t (fig. 42b). Completa:
FF' è …………………… a PP', quindi il triangolo OFF' è simile al triangolo OPP'. I due
triangoli, allora, hanno i lati omologhi in proporzione:
FF' .......OF' .......
= ⇒ FF' .......OF' .......
= (��)
Ma, FF' = …… , OF' = ……. ;
PP' = …… , OP' = ……. .
Sostituendo nella (��) le misure determinate, si ottiene:
FF' .............. OP '
= ⇒ .....3 .....
y= ⇒ y = ………..
La relazione che esiste fra le coordinate del punto P è, dunque, …………… alla relazione che
esiste fra le coordinate dei punti B, F, K.
Poiché P è un punto qualsiasi di t, possiamo dire che la caratteristica di tutti i punti di t è quella di
avere l’ordinata ………………….. dell’ascissa; l’ equazione della retta t è : y = ………. .
Le coordinate del punto O(0,0), origine degli assi, sono soluzione dell’equazione 13
y x= ? SI NO
Possiamo, allora, dire che O(0, 0) …………………… alla retta t .
In sintesi:
� l’ equazione della retta t è: 13
y x==== ;
� la retta t passa per l’origine degli assi.
161
PROVA TU
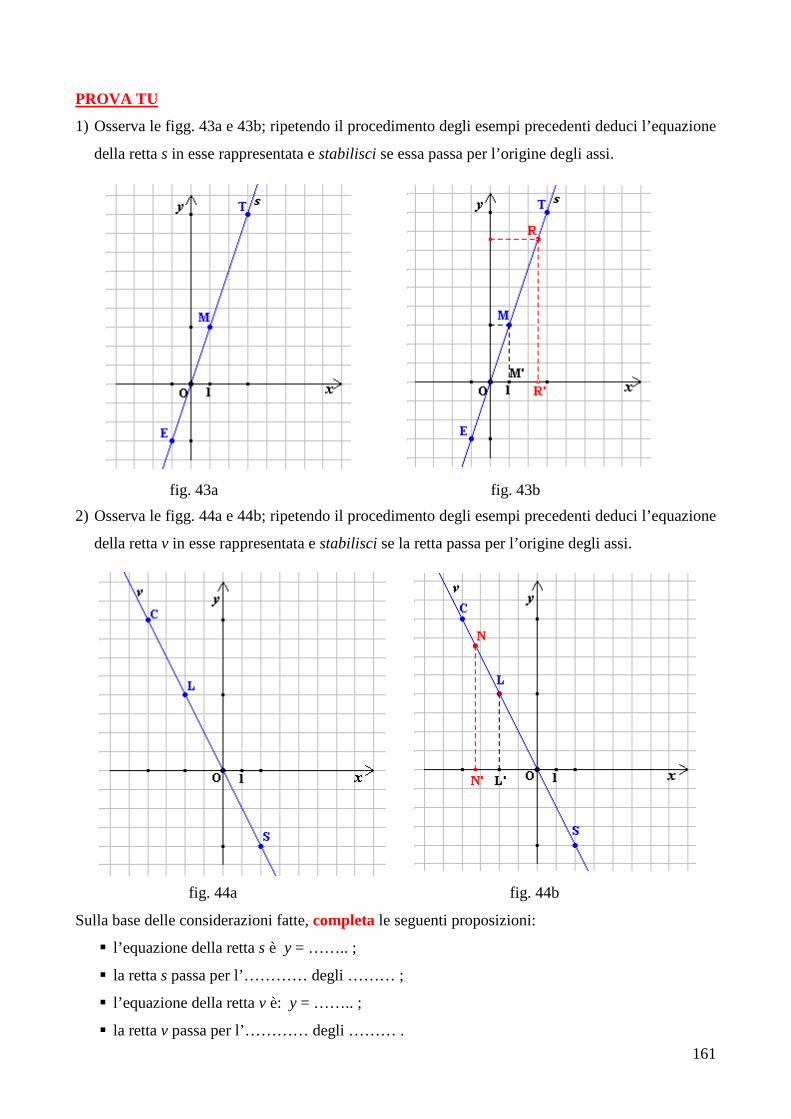
1) Osserva le figg. 43a e 43b; ripetendo il procedimento degli esempi precedenti deduci l’equazione
della retta s in esse rappresentata e stabilisci se essa passa per l’origine degli assi.
fig. 43a fig. 43b
2) Osserva le figg. 44a e 44b; ripetendo il procedimento degli esempi precedenti deduci l’equazione
della retta v in esse rappresentata e stabilisci se la retta passa per l’origine degli assi.
fig. 44a fig. 44b
Sulla base delle considerazioni fatte, completa le seguenti proposizioni:
� l’equazione della retta s è y = …….. ;
� la retta s passa per l’………… degli ……… ;
� l’equazione della retta v è: y = …….. ;
� la retta v passa per l’………… degli ……… .

162
Nella seguente tabella sono sintetizzate le considerazioni svolte in precedenza:
RETTA EQUAZIONE PASSA PER O(0,0)
r y = 2x SI
t
13
y x= SI
s y = 3x SI
v y = −2x SI
bisettrice I, III quadrante y = x SI
bisettrice II, IV quadrante y = −x SI
Analizzando la tabella, completa le seguenti affermazioni:
• tutte le rette considerate passano per l’……………………… degli …….….. ;
• l’equazione di ciascuna retta è del tipo y = f (x), dove f (x) è un ………………….….. di
………….. grado;
• Le equazioni della seconda colonna, dunque, sono del tipo y = m…. (m ∈ R).
Possiamo, allora, generalizzare e affermare che tutte le rette passanti per l’origine degli assi hanno
equazione simile a quella delle rette della tabella?
Prima di rispondere è necessario riflettere; non dimentichiamo che, spesso, esistono casi particolari.
Infatti, …… anche gli assi cartesiani passano per l’origine degli assi!
� L’equazione dell’asse x è: y = ……. Per quale valore di m essa si ottiene dall’equazione y = mx ?
a −1; b 0; c 1; d 3; e nessun valore di m
L’equazione dell’asse x, dunque, è un’equazione del tipo y = mx.
� L’equazione dell’asse y è: x = …….. Per quale valore di m si ottiene dall’equazione y = mx ?
a 1; b 0; c −1; d 7; e nessun valore di m
L’equazione dell’asse y, dunque, non è un’equazione del tipo y = mx.
Adesso, possiamo generalizzare:
l’ equazione di una retta passante per l’origine degli assi, diversa dall’asse delle ordinate, è:
y = mx (m ∈ R).
Viceversa, ogni equazione del tipo y = mx ( m∈ R ) ha, come rappresentazione grafica, una retta
passante per l’origine degli assi.

163
PROVA TU
Quali, fra le seguenti, è l’equazione di una retta passante per l’origine degli assi cartesiani?
a) 6y x= − ; b) 22y x= ; c) 1y x= + ; d) 1y = ; e) 0y =
Le considerazioni appena svolte, permettono di affermare che la rappresentazione grafica di una
funzione del tipo y = mx, al variare di m nell’insieme dei numeri reali, è una retta passante per
l’origine degli assi del sistema cartesiano fissato nel piano.
Quali indicazioni sulla retta possiamo dedurre dal valore di m?
Nella fig. 45 sono rappresentate le rette r, t, v della precedente tabella:
fig. 45
Osservando la fig. 45, completa le risposte alle seguenti domande.
a) Considera la retta t :
• Per quale valore di m, dall’equazione generica y = mx, si ottiene l’equazione di t ?
m = …….. .
• Il valore di m trovato è positivo o negativo? m ….. 0.
• In quali quadranti sono situati i punti della retta t (distinti dall’origine degli assi)?
I punti della retta t sono situati nel ………….. quadrante e nel ………………. quadrante.
b) Considera la retta r :
• Per quale valore di m, dall’equazione generica y = mx, si ottiene l’equazione di r ?
m = …….. .
• Il valore di m trovato è positivo o negativo? m ….. 0.
• In quali quadranti sono situati i punti della retta r (distinti dall’origine degli assi)?
I punti della retta r sono situati nel ………….. quadrante e nel ………………. quadrante.
y = 13
x
y = 2x
y = −−−−3x

164
c) Considera la retta v :
• Per quale valore di m, dall’equazione generica y = mx, si ottiene l’equazione di v ?
m = …….. .
• Il valore di m trovato è positivo o negativo? m ….. 0.
• In quali quadranti sono situati i punti della retta v (distinti dall’origine degli assi)?
I punti della retta v sono situati nel ………….. quadrante e nel ………………. quadrante.
Rappresenta, nel piano cartesiano della fig. 46, la retta a di equazione 23
y x= − .
fig. 46
Dalla geometria euclidea, sai che la retta passante per due punti distinti del piano è ………..….. .
In generale, per rappresentare una retta nel piano cartesiano, dunque, è necessario determinare le
coordinate di due suoi punti.
Sicuramente un punto della retta a è l’…………………….. degli assi, perché la sua equazione è del
tipo y = …….. .
Per determinare il secondo punto della retta a è sufficiente assegnare alla variabile indipendente x
un valore a piacere e determinare la sua immagine:
x = 3 ⇒ 2 3 2 1 23
y y y= − ⋅ ⇒ = − ⋅ ⇒ = −
Il secondo punto della retta a è, quindi, R(3, …….).
Per rappresentare la retta a basta tracciare la retta passante per i punti O(…., ….) e R(…., …..).
Osserva, adesso, la retta a e, come hai fatto in precedenza, completa le risposte alle seguenti
domande:
• Per quale valore di m, dall’equazione generica y = mx, si ottiene l’equazione di a ?
m = …….. .
• Il valore di m trovato è positivo o negativo? m ….. 0.

165
• In quali quadranti sono situati i punti della retta a (distinti dall’origine degli assi)?
I punti della retta a sono situati nel ………….. quadrante e nel ………………. quadrante.
Osservando le figg. 45 e 46 e riflettendo sulle risposte date alle precedenti domande nei diversi casi,
avrai, sicuramente, notato che:
� se m > ….. , i punti delle rette sono situati nel ………….. e …………….. quadrante;
� se m < ….. , i punti delle rette sono situati nel ………….. e …………….. quadrante.
Viceversa,
� se i punti delle rette sono situati nel primo e terzo quadrante, m >….. ;
� se i punti delle rette sono situati nel secondo e quarto quadrante, m < ….. .
Siamo portati, allora, a pensare che questa sia una proprietà più generale.
Vediamo, allora, se è possibile generalizzare.
Siano d una retta passante per l’origine degli assi situata nel primo e terzo quadrante e P(a, b) un
generico punto di d (fig. 47a e fig. 47b) [operiamo come se le coordinate fossero “diverse” nelle
due figure]:
fig. 47a fig. 47b
L’equazione della retta d è del tipo y = mx e, poiché P è un punto di d, le sue coordinate sono
soluzione dell’equazione stessa. Sostituendo le coordinate di P nell’equazione della retta d, si
ottiene:
b = ma ⇒ bma
=
Completa:
P(a, b) ∈ I quadrante ⇒ a > ….. ∧ b > ….. ⇒ ......ba
> ⇒ m > ….. ;
P(a, b) ∈ III quadrante ⇒ a < ….. ∧ b < ….. ⇒ ......ba
> ⇒ m > ….. .

166
Adesso, siano g una retta passante per l’origine degli assi situata nel secondo e quarto quadrante e
P(a, b) un generico punto di g (fig. 48a e fig.48b) [operiamo come se le coordinate fossero
“diverse” nelle due figure]:
fig. 48a fig. 48b
L’equazione della retta g è del tipo y = mx e, poiché P è un punto di g, le sue coordinate sono
soluzione dell’equazione stessa. Sostituendo le coordinate di P nell’equazione della retta g, si
ottiene:
b = ma ⇒ bma
=
Completa:
P(a, b) ∈ II quadrante ⇒ a < ….. ∧ b > ….. ⇒ ......ba
< ⇒ m < ….. ;
P(a, b) ∈ IV quadrante ⇒ a > ….. ∧ b < ….. ⇒ ......ba
< ⇒ m < ….. .
Dalle precedenti osservazioni emerge un’altra considerazione molto importante: bma
==== , cioè il
valore di m è uguale al rapporto fra l’ordinata e l’ascissa di un generico punto della retta stessa.
Allora, qualunque punto si consideri appartenente ad una retta passante per l’origine degli assi
(diversa dall’asse delle ordinate), il rapporto fra l’ordinata e l’ascissa è costante.
La funzione y = mx è tale che il rapporto yx
si mantiene costante al variare di x nell’insieme dei
numeri reali.
Ricorderai che, grandezze con queste caratteristiche, sono direttamente proporzionali.
Possiamo dire, allora, che la proporzionalità diretta è espressa dalla funzione y = mx e la sua
rappresentazione grafica è una retta passante per l’origine degli assi.

167
� Sia y = 3x l’equazione della retta a passante per l’origine degli assi; completa la seguente tabella:
x −3 −1 0 2 83
y −3 0
Consideriamo le seguenti coppie di punti della retta a:
A(−3, ….) e B(2, ….) ; C(−1, −3) e B(2, ….); B(2, ….) e F( )8, ....3
Completa la seguente tabella dove nella seconda colonna è indicata la differenza delle ascisse
(∆x), nella terza colonna la differenza delle ordinate (∆y), nell’ultima colonna è indicato il
rapporto fra la differenza delle ordinate e la differenza delle ascisse yx
∆ ∆
:
Coppia di punti ∆x ∆y yx
∆∆
A, B …… …… ……
C, B ….. …… ……
B, F …… …… ……
Che cosa osservi nell’ultima colonna?
…………………………………………………………………………………………………………
Deduciamo, allora, che il rapporto ∆∆∆∆∆∆∆∆
yx
è costante ed è uguale al valore di m.
Al rapporto ∆
∆
yx
si dà il nome di rapporto incrementale.
PROVA TU
Verifica che se, nell’equazione y = mx, m > 0, allora i punti della retta sono punti del primo e del
terzo quadrante; se, nell’equazione y = mx, m < 0, allora i punti della retta sono punti del secondo e
quarto quadrante.
(Suggerimento: se (a, b) sono le coordinate di un punto P della retta, si ha bma
= e poiché m > 0,
anche ba
> 0; quindi b > ….. ∧ a > ….., oppure ..... .....b a< ∧ < . Il punto P appartiene
………………. ; se m < 0, anche ……………….. ).

168
In sintesi:
Sia y = mx l’equazione di una retta passante per l’origine degli assi:
� m > 0 ⇔ la retta è situata nel primo e terzo quadrante;
� m < 0 ⇔ la retta è situata nel secondo e quarto quadrante;
� ∆
∆
yx
è costante e ∆
∆====y
mx
Quali altre indicazioni può dare il valore di m?
Indichiamo con α l’angolo che una retta passante per l’origine degli assi forma con la direzione
positiva dell’asse delle ascisse (fig.49a e fig. 49b):
fig. 49a fig. 49b
Osserva la fig. 49a e rispondi ai seguenti quesiti:
In quale quadrante sono situati i punti della retta d di ordinata positiva?
a I b II c III d IV
Il lato OP dell’angolo α, rispetto all’angolo formato dalle direzioni positive degli assi cartesiani:
a è interno b coincide con l’asse x c è esterno d coincide con l’asse y
Possiamo, allora, dire che l’angolo α è ………….. dell’angolo xOy e, quindi, α è un angolo
……………
L’equazione della retta d è y = ………. , con m ….. 0.

169
Osserva la fig. 49b e rispondi ai seguenti quesiti:
In quale quadrante sono situati i punti della retta s di ordinata positiva?
a I b II c III d IV
Il lato OP dell’angolo α, rispetto all’angolo formato dalle direzioni positive degli assi cartesiani:
a è interno b coincide con l’asse x c è esterno d coincide con l’asse y
Possiamo, allora, dire che l’angolo α è ………….. dell’angolo xOy e, quindi, α è un angolo
……………
L’equazione della retta s è y = ………. , con m ….. 0.
Possiamo, così, sintetizzare:
� m > 0 ⇔ αααα angolo acuto;
� m < 0 ⇔ αααα angolo ottuso.
Dall’ultima osservazione e dagli esempi precedenti, possiamo dedurre che dal valore di m dipende
l’angolo α che la retta forma con la direzione positiva dell’asse delle ascisse, ossia l’inclinazione
della retta sull’asse delle ascisse.
Per questo motivo m prende il nome di coefficiente angolare della retta o pendenza della retta.
Conveniamo di indicare sempre con la lettera α l’angolo che una retta forma con la direzione
positiva dell’asse x .
Nella fig. 50 sono rappresentate le rette:
a : y = 13
x ; b: y = 34
x; c : y = x; d : y = 12
x
Osserva il primo quadrante della fig. 50 e completa:
fig. 50
La semiretta Oc è la ……………………….. del ……….. quadrante, quindi α = …..° .
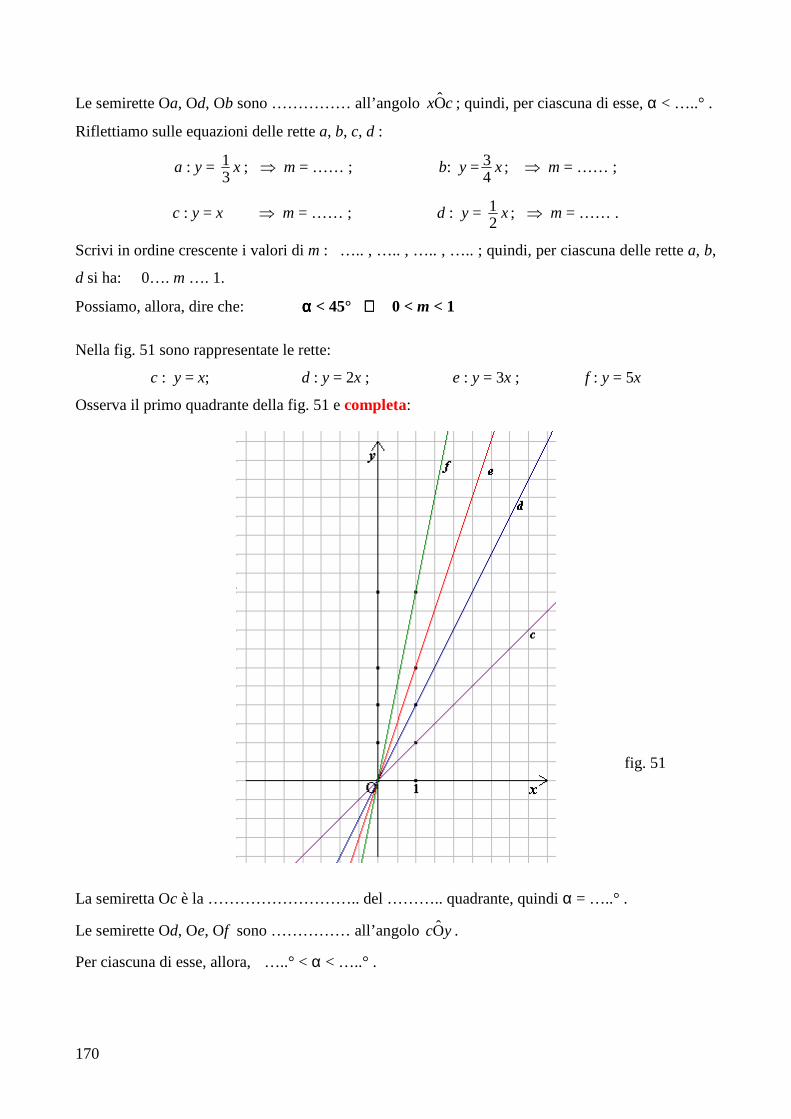
170
Le semirette Oa, Od, Ob sono …………… all’angolo Ox c ; quindi, per ciascuna di esse, α < …..° .
Riflettiamo sulle equazioni delle rette a, b, c, d :
a : y = 13
x ; ⇒ m = …… ; b: y = 34
x; ⇒ m = …… ;
c : y = x ⇒ m = …… ; d : y = 12
x; ⇒ m = …… .
Scrivi in ordine crescente i valori di m : ….. , ….. , ….. , ….. ; quindi, per ciascuna delle rette a, b,
d si ha: 0…. m …. 1.
Possiamo, allora, dire che: αααα < 45° ⇔⇔⇔⇔ 0 < m < 1
Nella fig. 51 sono rappresentate le rette:
c : y = x; d : y = 2x ; e : y = 3x ; f : y = 5x
Osserva il primo quadrante della fig. 51 e completa:
fig. 51
La semiretta Oc è la ……………………….. del ……….. quadrante, quindi α = …..° .
Le semirette Od, Oe, Of sono …………… all’angolo Oc y.
Per ciascuna di esse, allora, …..° < α < …..° .

171
Riflettiamo sulle equazioni delle rette c, d, e, f :
c : y = x; ⇒ m = …… ; d : y = 2x ; ⇒ m = …… ;
e : y = 3x ; ⇒ m = …… ; f : y = 5x ; ⇒ m = …… ;
Scrivi in ordine crescente i valori di m : ….. , ….. , ….. , ….. ; quindi, per ciascuna delle rette d, e,
f si ha: m …. 1.
Possiamo, allora, dire che: 45° < αααα < 90° ⇔⇔⇔⇔ m > 1
Inoltre, osservando le figure 50 e 51, notiamo che, se il coefficiente angolare è positivo, a
coefficiente angolare maggiore corrisponde un angolo αααα maggiore.
Nella figura 52 sono rappresentate le rette;
g : y = −x ; h : y = −2x ; k : y = −4x ; m: y = −5x
Osserva il secondo quadrante della fig. 52 e completa:
fig. 52
La semiretta Og è la ……………………….. del …………….. quadrante, quindi α = …..° .
Le semirette Oh, Ok, Om sono …………… all’angolo Oy g .
Per ciascuna di esse, allora, …..° < α < …..° .
Riflettiamo sulle equazioni delle rette g, h, k, m :
g : y = −x ; ⇒ m = …… ; h : y = −2x ; ⇒ m = …… ;
k : y = −4x ; ⇒ m = …… ; m: y = −5x; ⇒ m = …… ;

172
Scrivi in ordine crescente i valori di m : ….. , ….. , ….. , ….. ; quindi, per ciascuna delle rette h, k,
m si ha: m …. −1.
Possiamo, allora, dire che: 90° < αααα < 135° ⇔⇔⇔⇔ m < −−−−1
Nella fig. 53 sono rappresentate le rette:
g : y = −x ; r : 12
y x= − ; s : 23
y x= − ; t : 56
y x= −
Osserva il secondo quadrante della fig. 52 e completa:
fig. 53
La semiretta Og è la ……………………….. del …………….. quadrante, quindi α = …..° .
Le semirette Or, Os, Ot sono …………… all’angolo Ox g .
Per ciascuna di esse, allora, …..° < α < …..° .
Riflettiamo sulle equazioni delle rette g, r, s, t :
g : y = −x ; ⇒ m = …… ; r : 12
y x= − ; ⇒ m = …… ;
s : 23
y x= − ; ⇒ m = …… ; t : 56
y x= − ; ⇒ m = …… .
Scrivi in ordine crescente i valori di m: ….. , ….. , ….. , ….. ; quindi, per ciascuna delle rette r, s,
t si ha: −1 …. m …. 0.
Possiamo, allora, dire che:
135° < αααα < 180° ⇔⇔⇔⇔ −−−−1 < m < 0
Inoltre, osservando le figure 52 e 53, notiamo che, se il coefficiente angolare è negativo, a
coefficiente angolare minore corrisponde un angolo αααα maggiore.

173
Sintetizziamo, adesso, i risultati raggiunti in questo paragrafo:
� l’ equazione di una retta passante per l’origine degli assi, tranne l’asse delle ordinate, è una
equazione del tipo y = mx (m ∈ R);
� la rappresentazione grafica di un’equazione del tipo y = mx (m ∈ R) è una retta passante per
l’origine degli assi cartesiani e distinta dall’asse delle ordinate;
� la funzione y = mx esprime la legge della proporzionalità diretta ;
� ∆
∆
yx
è costante ;
� m = ;∆
∆
yx
� il coefficiente m prende il nome di coefficiente angolare o pendenza;
� m > 0 ⇔ αααα angolo acuto; m < 0 ⇔ αααα angolo ottuso;
in particolare:
���� m < −1 ⇔ 90° < α < 135°;
���� −1 ≤ m < 0 ⇔ 135° ≤ α < 180°;
���� 0 < m ≤ 1 ⇔ 0 < α ≤ 45°;
���� m > 1 ⇔ 45° < α < 90°.
PROVA TU
1) Quale delle seguenti rette è situata nel primo e terzo quadrante?
a) 43
y x= − ; b) 47
y x= ; c) y = 3; d) y x= − ; e) 2y = − .
2) Per ciascuna delle seguenti rette, stabilisci se l’angolo α è acuto o ottuso:
a) y x= − ; b) 32
y x= ; c) 5y x= − ; d) 54
y x= − ; e) 16
y x= − .
3) Quale delle seguenti rette forma con la direzione dell’asse x l’angolo maggiore?
a) 56
y x= ; b) 107
y x= − ; c) y x= − ; d) 75
y x= ; e) 3 .4
y x= −
11.14 Equazione di una generica retta non passante per l’origine degli assi
Siano r la retta di equazione y = 3x e v�
un vettore avente la stessa direzione e lo stesso verso
dell’asse delle ordinate e tale che 2v =� .
Applichiamo alla retta r la traslazione τ v� di vettore v
�
.
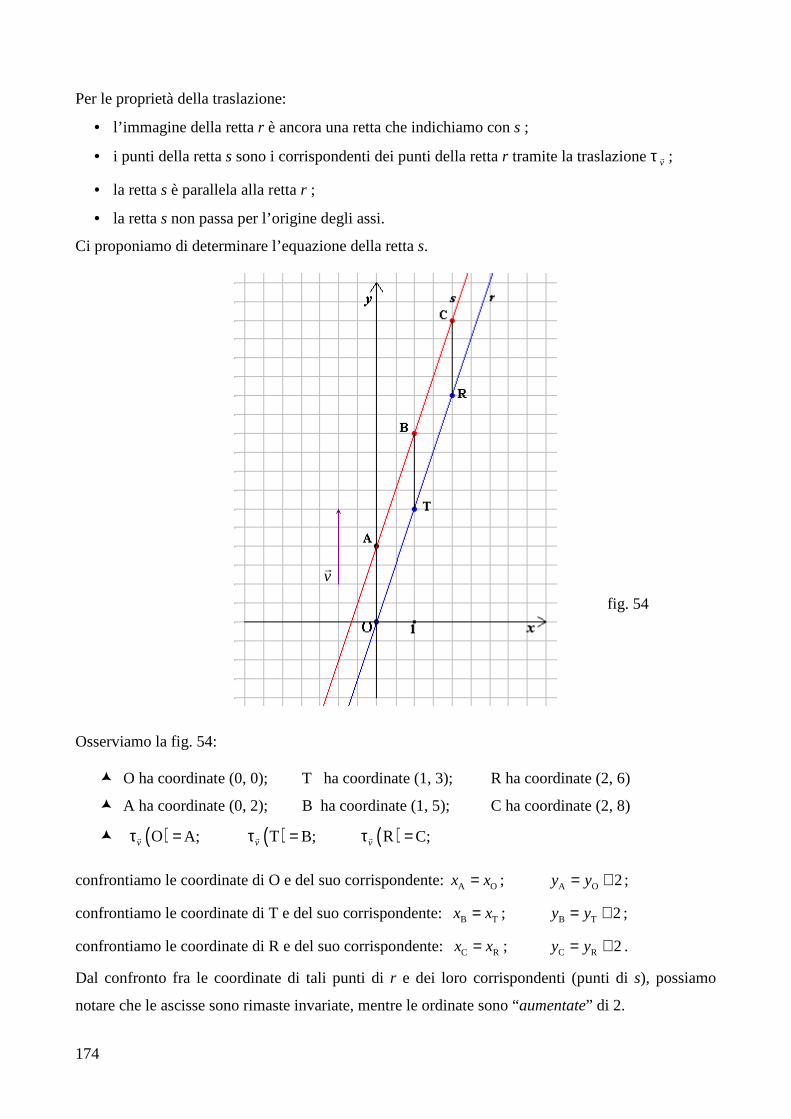
174
Per le proprietà della traslazione:
• l’immagine della retta r è ancora una retta che indichiamo con s ;
• i punti della retta s sono i corrispondenti dei punti della retta r tramite la traslazione τ v� ;
• la retta s è parallela alla retta r ;
• la retta s non passa per l’origine degli assi.
Ci proponiamo di determinare l’equazione della retta s.
fig. 54
Osserviamo la fig. 54:
� O ha coordinate (0, 0); T ha coordinate (1, 3); R ha coordinate (2, 6)
� A ha coordinate (0, 2); B ha coordinate (1, 5); C ha coordinate (2, 8)
� ( )Ovτ =� A; ( )Tvτ =� B; ( )Rvτ =� C;
confrontiamo le coordinate di O e del suo corrispondente: A Ox x= ; A O 2y y= + ;
confrontiamo le coordinate di T e del suo corrispondente: B Tx x= ; B T 2y y= + ;
confrontiamo le coordinate di R e del suo corrispondente: C Rx x= ; C R 2y y= + .
Dal confronto fra le coordinate di tali punti di r e dei loro corrispondenti (punti di s), possiamo
notare che le ascisse sono rimaste invariate, mentre le ordinate sono “aumentate” di 2.
v�

175
Ricordiamo che, per ciascun punto di r, l’ordinata è il triplo dell’ascissa; quindi:
O O3y x= ; T T3y x= ; R R3y x=
Possiamo, allora, scrivere:
A O3 2y x= + ; B T3 2y x= + ; C R3 2y x= +
D’altra parte, abbiamo già osservato che: A Ox x= , B Tx x= , C Rx x= ; quindi, si ottiene:
A A3 2y x= + ; B B3 2y x= + ; C C3 2y x= +
Siamo portati, allora, a congetturare che le coordinate dei punti di s siano legate dalla seguente
relazione: l’ordinata è data dalla somma del triplo dell’ascissa con il numero 2.
Vediamo, allora, se questa relazione vale per qualsiasi punto della retta s .
Sia P(a, b) un generico punto della retta r (fig. 55):
fig. 55
Osserviamo che:
� P ∈ r ; Q ∈ s ;
� P ha coordinate (a, b); Q ha coordinate (a, b + 2) (perché?);
� ( )Pvτ =� Q;
Poiché P è un punto di r , b = 3a ; quindi, le coordinate di Q sono (a, 3a + 2).
v�

176
Allora, la relazione che esiste fra le coordinate del punto Q è quella che avevamo congetturato:
l’ordinata è uguale alla somma del triplo dell’ascissa con il numero 2; in simboli: y = 3x + 2.
L’ equazione della retta s è, allora: y = 3x + 2.
Facciamo subito qualche osservazione:
• la retta s non passa per l’origine degli assi;
• s è parallela a r e, quindi, le due rette formano con la direzione positiva dell’asse delle ascisse
angoli congruenti;
• nell’equazione di r e nell’equazione di s il coefficiente di x è uguale:
• la sua equazione è del tipo y = f (x) dove f (x) è un polinomio di primo grado.
Un altro esempio.
Siano t la bisettrice del secondo e quarto quadrante (qual è la sua equazione? ………..) e la retta a
la sua immagine nella traslazione τ di vettore v�
, essendo v�
un vettore avente la stessa direzione
dell’asse delle ordinate, verso opposto a quello dell’asse delle ordinate e modulo 1v =� (fig. 56):
fig.56
Dall’analisi della figura si ha che:
� O ha coordinate (0, 0); D ha coordinate (−1, 1); E ha coordinate (−2, 2)
� G ha coordinate (0, −1); H ha coordinate (−1, 0); K ha coordinate (−2, 1)
� ( )Ovτ =� G; ( )Dvτ =� H; ( )Evτ =� K;
confrontiamo le coordinate di O e del suo corrispondente G: G Ox x= ; G O 1y y= − ;
confrontiamo le coordinate di D e del suo corrispondente H: H Dx x= ; H D 1y y= − ;
confrontiamo le coordinate di E e del suo corrispondente K: K Ex x= ; K E 1y y= − .
v�

177
Dal confronto fra le coordinate di tali punti di t e dei loro corrispondenti (punti di a), possiamo
notare che le ascisse sono rimaste invariate, mentre le ordinate sono “diminuite” di 1.
Ricordiamo che, per ciascun punto di t, l’ordinata è l’opposto dell’ascissa; quindi:
O Oy x= − ; D Dy x= − ; E Ey x= −
Possiamo, allora, scrivere:
G O 1y x= − − ; H D 1y x= − − ; K E 1y x= − −
D’altra parte, abbiamo già osservato che: G Ox x= , D Hx x= , K Ex x= ; quindi, si ottiene:
G G 1y x= − − ; H H 1y x= − − ; K K 1y x= − −
Siamo portati, allora, a congetturare che le coordinate dei punti di a siano legate dalla seguente
relazione: l’ordinata è uguale alla differenza fra l’opposto dell’ascissa e il numero 1.
Procedendo come nell’esempio precedente, verifica che questa relazione vale per qualsiasi punto
della retta a .
Possiamo, allora, dire che l’equazione della retta a è 1y x= − −= − −= − −= − − .
Ancora qualche osservazione:
• la retta a non passa per l’origine degli assi;
• a è parallela a t e, quindi, le due rette formano con la direzione positiva dell’asse delle ascisse
angoli congruenti;
• nell’equazione di t e nell’equazione di a il coefficiente di x è uguale;
• l’equazione della retta a è del tipo y = f (x) dove f (x) è un polinomio di primo grado.
PROVA TU
Rappresenta, in un piano cartesiano, la retta d di equazione y = −2x e la sua immagine h nella
traslazione τ di vettore v�
, essendo v�
un vettore avente stessa direzione e stesso verso dell’asse
delle ordinate e 1v =� .
Anche per le rette d e h possiamo fare considerazioni analoghe alle precedenti:
• la retta h non passa per l’origine degli assi;
• h è parallela a d e, quindi, le due rette formano con la direzione positiva dell’asse delle ascisse
angoli congruenti;
• nell’equazione di d e nell’equazione di h il coefficiente di x è uguale;
• l’equazione della retta h è del tipo y = f (x) dove f (x) è un polinomio di primo grado.

178
Alla luce delle considerazioni fatte per ciascuno degli esempi precedenti, siamo portati a fare la
seguente congettura:
� una retta non passante per l’origine è ottenuta per traslazione da una retta passante per
l’origine degli assi;
� l’equazione di una retta non passante per l’origine degli assi è del tipo y = f (x) dove f (x) è
un polinomio di primo grado.
E, allora, generalizziamo.
Siano r una retta di equazione y = mx ed s la sua immagine in una traslazione di vettore v�
avente
stessa direzione dell’asse delle ordinate, verso uguale o opposto a quello dell’asse delle ordinate e
modulo v q=� .
fig. 57a fig. 57b
Osserva le fig. 57a e 57b:
� P ∈ r ; Q ∈ s ;
� P ha coordinate (a, b);
� ( )Pvτ =� Q.
Distinguiamo due casi:
1) v�
ha lo stesso verso dell’asse delle ordinate (fig. 57a): le coordinate di Q sono (a, b + q).
Dal momento che P è un punto di r , b = ma ; quindi, le coordinate di Q sono (a, ma + q).
Poiché P è un qualsiasi punto di r, queste osservazioni valgono in generale; possiamo, perciò,
affermare che qualsiasi punto della retta s ha coordinate del tipo (x, mx + q).
L’equazione della retta s è, quindi: y = mx + q.
v�
v�
179
2) v�
ha verso opposto a quello dell’asse delle ordinate (fig. 57b): le coordinate di Q sono (a, b − q).
Dal momento che P è un punto di r , b = ma ; quindi, le coordinate di Q sono (a, ma − q).
Poiché P è un qualsiasi punto di r, queste osservazioni valgono in generale; possiamo, perciò,
affermare che qualsiasi punto della retta s ha coordinate del tipo (x, mx − q).
L’equazione della retta s è, quindi: y = mx −−−− q.
Osserviamo che:
y = mx −−−− q ⇔ y = mx + (−−−− q).
In ogni caso, dunque, l’equazione della retta s può essere scritta nella forma y = mx + q, dove q è
preceduto dal segno “+” se v�
ha lo stesso verso dell’asse delle ordinate, q è preceduto dal segno
“−” se v�
ha verso opposto a quello dell’asse delle ordinate.
Possiamo, allora, così sintetizzare:
l’equazione di una retta non passante per l’origine degli assi, e non parallela agli assi cartesiani, è
del tipo y = mx + q ; viceversa, la rappresentazione grafica di una equazione del tipo y = mx + q è
una retta non passante per l’origine degli assi.
Ma, l’equazione y = mx + q può essere associata a tutte le rette non passanti per l’origine degli
assi?
Come al solito, esistono casi particolari:
a) rette parallele all’asse delle ascisse;
b) rette parallele all’asse delle ordinate.
a) l’equazione di una retta parallela all’asse delle ascisse è del tipo y = k (par. 11.11).
Esiste almeno un valore di m per il quale questa equazione può essere ottenuta dall’equazione
y = mx + q ?
La risposta è affermativa; infatti se m = 0, dall’equazione y = mx + q si ottiene y = q che esprime
una retta parallela all’asse delle ascisse.
b) l’equazione di una retta parallela all’asse delle ordinate è del tipo x = h (par. 11.11).
Esiste almeno un valore di m per il quale questa equazione può essere ottenuta dall’equazione
y = mx + q ? Questa volta la risposta è negativa: non esiste alcun valore di m per il quale
dall’equazione y = mx + q si possa ottenere una equazione del tipo x = h.
Possiamo, allora, concludere che:
y = mx + q (m, q ∈ R ∧ q ≠≠≠≠ 0) è l’equazione di una retta non passante per l’origine
degli assi e non parallela all’asse delle ordinate.
OSSERVAZIONI
Quali indicazioni possono dare i valori di m e q nell’equazione y = mx + q?

180
Sappiamo che una retta non passante per l’origine degli assi si ottiene per traslazione da una retta
passante per l’origine degli assi ed inoltre rette che si corrispondono in una traslazione sono
parallele; dunque, gli angoli che tali rette formano con la direzione positiva dell’asse delle ascisse
sono congruenti.
Il significato di m, pertanto, è lo stesso:
• il valore di m dà indicazioni sull’inclinazione della retta sull’asse delle ascisse e, ovviamente
anche in questa equazione, prende il nome di coefficiente angolare o pendenza della retta.
Inoltre, nell’equazione y = mx , si ha m = yx
∆∆ .
E’ facile dimostrare che anche nell’equazione y = mx + q, il valore di m è uguale al rapporto fra la
differenza delle ordinate e la differenza dell’ascisse di due qualsiasi punti della retta.
Siano P e T due punti distinti di una retta di equazione y = mx + q; allora:
P P P T
P TT T
x a y ma q y yyx x xx b y mb q
= ⇒ = + −∆ ⇒ =∆ −= ⇒ = +
e, quindi:
( ) ( ) ( )possiamo semplificare,perchè?ma q mb q m a bma q mb qy
mx a b a b a b
+ − + −+ − −∆ = == = = =∆ − − − .
Osserva le figure 54 e 56 e la retta che è stata rappresentata nell’esercizio proposto a pag. 54;
successivamente completa la seguente tabella:
Equazione q Coordinate del punto intersezione
della retta con l’asse y
y = 3x + 2 …… (0, …..)
y = −x − 1 …… (0, …..)
y = −2x + 1 …… (0, …..)
Confronta la seconda e la terza colonna: il termine q dell’equazione è ……………. all’ordinata del
punto intersezione della retta con l’asse delle ordinate.
Verifica , con altri esempi, questa proprietà.
Il termine q dell’equazione indica, allora, l’ordinata del punto intersezione della retta con l’asse
delle ordinate; per questo motivo esso prende il nome di ordinata all’origine .
Infatti, tale valore si ottiene assegnando ad x il valore zero.

181
Sintetizziamo, adesso, i risultati raggiunti in questo paragrafo:
� Una retta non passante per l’origine degli assi è immagine di una retta passante per
l’origine degli assi nella traslazione di un opportuno vettore avente la stessa direzione
dell’asse delle ordinate;
� l’ equazione di una retta non passante per l’origine degli assi e non parallela all’asse delle
ordinate, è una equazione del tipo y = mx + q { }( )0m R∈ ∧ ∈ −R q ;
� la rappresentazione grafica di un’equazione del tipo y = mx + q { }( )0m R∈ ∧ ∈ −R q è una
retta non passante per l’origine degli assi cartesiani e non parallela all’asse delle ordinate;
� il termine q indica l’ordinata del punto intersezione della retta con l’asse delle ordinate;
� il termine q si chiama ordinata all’origine ;
� ∆
∆
yx
è costante e ∆∆∆∆==== ∆∆∆∆
ym
x
� il coefficiente m si chiama coefficiente angolare o pendenza;
� m > 0 ⇔ αααα angolo acuto; m < 0 ⇔ αααα angolo ottuso;
in particolare:
���� m < −1 ⇔ 90° < α < 135°;
���� −1 ≤ m < 0 ⇔ 135° ≤ α < 180°;
���� 0 < m ≤ 1 ⇔ 0 < α ≤ 45°;
���� m > 1 ⇔ 45° < α < 90°.
PROVA TU
1) Una sola delle seguenti equazioni ha come rappresentazione grafica una retta non passante per
l’origine degli assi; quale?
a) 2 1y x= − + ; b) 3 1y x= + ; c) 4y x= − ; d) 0y = ; e) 23y x=
2) Scrivi l’equazione di una retta che incontri l’asse delle ordinate nel punto F(0, −1) e tale che
α < 45°.
3) La retta a di equazione y = 3x – 5 è ottenuta della retta y = 3x applicando una traslazione di
vettore:
a) v�
avente la stessa direzione, stesso verso dell’asse delle ordinate e 5v =� ;
b) v�
avente la stessa direzione, verso opposto a quello dell’asse delle ordinate e 6v =� ;
c) v�
avente la stessa direzione, verso opposto a quello dell’asse delle ordinate e 5v =� .

182
11.15 Rette parallele
Consideriamo le rette a: y = 2x – 3 e b: y = 2x + 4 (fig. 58):
fig. 58a fig. 58b
Completa:
Osservando l’equazione delle due rette, notiamo che esse hanno lo ………… coefficiente angolare.
Per le considerazioni fatte nel paragrafo 11.14, la retta a è ottenuta dalla retta r : y = …..
applicando una traslazione di vettore 1v�
dove 1v�
è un vettore avente ………… direzione ma verso
…………… a quello dell’asse delle ordinate e 1v�
= …….. ; la retta a, quindi, è parallela alla retta r.
La retta b è ottenuta dalla retta r : y = 2x applicando una traslazione di vettore 2v�
dove 2v�
è un
vettore avente ………. direzione, ……….. verso dell’asse delle ordinate e 2v�
= ………; la retta b e
la retta r sono, quindi parallele.
Poiché le rette a e b sono entrambe parallele alla retta r, esse sono parallele fra di loro.
In generale, siano s: y = mx + h e t: y = mx + k due rette del piano; per quanto osservato nel
paragrafo 11.14, la retta s è ottenuta applicando alla retta r: y = mx una traslazione di vettore 1v�
,
dove 1v�
è un opportuno vettore avente la stessa direzione dell’asse delle ordinate; la retta t è
ottenuta applicando alla retta r: y = mx una traslazione di vettore 2v�
, dove 2v�
è un opportuno
vettore avente la stessa direzione dell’asse delle ordinate.
Le rette s e t, dunque, sono parallele fra di loro perché entrambe parallele alla retta r.
Possiamo, allora, dire che due rette aventi lo stesso coefficiente angolare sono parallele.

183
Viceversa, se due rette sono parallele, allora hanno lo stesso coefficiente angolare.
Infatti, se due rette sono parallele, hanno la stessa inclinazione sull’asse delle ascisse e, quindi, lo
stesso coefficiente angolare.
Sintetizziamo, adesso, i risultati raggiunti in questo paragrafo:
⇔ a ba b m m⁄⁄ =⁄⁄ =⁄⁄ =⁄⁄ =
PROVA TU
1) Quali, fra le seguenti rette sono parallele?
a: y = −3x + 4; b: y = −4x − 4; c: y = x + 3;
d: y = x + 4 ; e: y = −3 ; f : y = 6
2) Scrivi l’equazione della retta a parallela alla retta t: y = 4x e passante per il punto B(0, 2).
11.16 Rette perpendicolari
Nella figura 59 sono rappresentate le rette r : y = 2x ed s: y = 12
x− ; siano P il punto di r e Q il
punto di s entrambi di ascissa 1.
fig. 59
Osservando la figura potremmo affermare che le rette r ed s sono perpendicolari.
Cerchiamo, allora, di stabilire se la nostra idea è corretta.
A tal proposito, consideriamo il triangolo POQ e stabiliamo se, per esso, vale il teorema di Pitagora
e, quindi, se vale la relazione ( ) ( ) ( )2 2 2OP OQ PQ+ = .
Le coordinate di P sono (1, 2); le coordinate di Q sono ( )11,2
− ; le coordinate di O sono (0,0).

184
Allora: ( )22 2OP 1 2 1 4 5= + = + = ; ( ) ( )22
2 1 1 5OQ 1 12 4 4
= + − = + = ;
( ) ( ) ( ) ( )2 2 22 1 1 5 25PQ 2 22 2 2 4
= − − = + = =
Inoltre: ( ) ( )2 2 5 25OP OQ 54 4
+ = + =
Dal momento che ( )2 25PQ4
= , abbiamo ottenuto che ( ) ( ) ( )2 2 2OP OQ PQ+ = .
Per il triangolo POQ, allora, vale il teorema di Pitagora e, quindi, esso è un triangolo rettangolo;
l’angolo retto è l’angolo di vertice O; le rette r ed s sono perpendicolari.
Poniamo, adesso, la nostra attenzione sui coefficienti angolari delle rette r ed s:
• il coefficiente angolare di r è .....rm = ;
• il coefficiente angolare di s è ......sm = ;
• il loro prodotto ......r sm m⋅ = .
E’ solo un caso?
Rappresenta nel piano cartesiano le rette v: 23
y x= e u: 32
y x= − e siano H e K i punti,
rispettivamente, di v e u entrambi di ascissa 1.
Seguendo l’esempio precedente, verifica che per il triangolo HOK vale il teorema di Pitagora; il
triangolo HOK è, dunque, un triangolo ……………… , l’angolo retto è l’angolo di vertice …..…. .
Le rette v ed u sono, quindi, …………………………. .
Osserva i coefficienti angolari delle rette v e u:
• il coefficiente angolare di v è .....vm = ;
• il coefficiente angolare di u è ......um = ;
• il loro prodotto ......v um m⋅ = .
Forse, allora, non è un caso; proviamo a generalizzare (fig. 60):
fig. 60

185
Siano a: y = mx e b: 1y xm
= − ( )0m≠ due rette e T ed R i punti, rispettivamente, di a e b entrambi
di ascissa 1.
Le coordinate di T sono (1, m); le coordinate di R sono ( )11,m
− ; le coordinate di O sono (0,0).
Consideriamo il triangolo ORT; si ha
( )22 2 2OT 1 1m m= + = + ; ( ) ( )22
22
1 1OR 1 1m m
= + − = + ;
( ) ( ) ( )2 22 1 1TR m mm m
= − − = +
Quindi: ( ) ( ) ( )22 22 2
2 21 1 1OT OR 1 1 2m m m
mm m+ = + + + = + + = + .
Dal momento che ( ) ( )22 1TR mm
= + , abbiamo ottenuto che ( ) ( ) ( )2 2 2OT OR TR+ = .
Per il triangolo TOR, allora, vale il teorema di Pitagora e, quindi, esso è un triangolo rettangolo;
l’angolo retto è l’angolo di vertice O; le rette a ed b sono perpendicolari.
Poniamo, adesso, la nostra attenzione sui coefficienti angolari delle rette a ed b:
• il coefficiente angolare di a è .....am = ;
• il coefficiente angolare di b è ......bm = ;
• il loro prodotto .........a bm m⋅ = .
Possiamo, allora, concludere che:
date le rette a: y mx= e b: 'y m x= , se il prodotto dei loro coefficienti angolari è −−−−1, le rette a e b
sono perpendicolari; in simboli:
1m m'⋅ = −⋅ = −⋅ = −⋅ = − ⇒⇒⇒⇒ a ⊥⊥⊥⊥ b
Dall’analisi degli esempi precedenti possiamo dire che condizione sufficiente affinchè due rette
siano perpendicolari è che il prodotto dei loro coefficienti angolari sia −−−−1.
Cerchiamo di stabilire se tale condizione è anche necessaria.
Consideriamo, a tal proposito, due rette s: y hx= e t : y kx= tra loro perpendicolari; siano P e Q due
punti, rispettivamente, di s e t entrambi di ascissa1 (fig. 61):

186
fig. 61
Osserviamo che:
P ∈ s ⇒ P (1, h); Q ∈ t ⇒ Q (1, k); O (0,0)
Il triangolo POQ è un triangolo rettangolo e, quindi, per esso vale il teorema di Pitagora:
( ) ( ) ( )2 2 2OP OQ PQ+ =
Ma ( )22 2 2OP 1 1h h= + = + ; ( )2
2 2 2OQ 1 1k k= + = + ; ( ) ( )2 2
PQ h k= −
Sostituendo nella relazione precedente, si ottiene:
( )22 21 1h k h k+ + + = − ⇒ 2 2 2 22 2h k h k hk+ + = + − ⇒ 2 2hk= − ⇒ 1hk = −
Ricordando che sm h= e tm k= , possiamo concludere che se le rette sono perpendicolari, il
prodotto dei coefficienti angolari è −−−−1. In simboli: a ⊥⊥⊥⊥ b ⇒⇒⇒⇒ 1m m'⋅ = −⋅ = −⋅ = −⋅ = − .
E, quindi: condizione necessaria affinchè due rette siano perpendicolari è che il prodotto dei
loro coefficienti angolari sia −−−−1.
Possiamo, allora, così sintetizzare i risultati ottenuti:
le rette a: y mx= e b: 'y m x= sono perpendicolari se e solo se il prodotto dei loro coefficienti
angolari è −−−−1. In simboli:
a ⊥⊥⊥⊥ b ⇔⇔⇔⇔ 1m m'⋅ = −⋅ = −⋅ = −⋅ = −
E opportuno osservare che la condizione di perpendicolarità appena determinata vale solo se le rette
a e b sono distinte dagli assi cartesiani (perché?).

187
Nel determinare la relazione che deve esistere fra i coefficienti angolari di due rette affinchè esse
siano perpendicolari, abbiamo considerato soltanto rette espresse da equazioni del tipo y mx= , cioè
rette passanti per l’origine degli assi cartesiani.
E se le rette non passano per l’origine degli assi cartesiani?
Ricorderai che una retta non passante per l’origine degli assi è ottenuta per …………………………
da una retta passante per l’origine degli assi e, quindi, è ad essa ……………………… .
Allora, se due rette passanti per l’origine degli assi sono perpendicolari, lo sono anche le rette ad
esse parallele.
Possiamo allora generalizzare:
Due rette a e b, non parallele agli assi cartesiani, sono perpendicolari se e solo se il prodotto dei
loro coefficienti angolari è −−−−1. In simboli:
a ⊥⊥⊥⊥ b ⇔⇔⇔⇔ 1a bm m⋅ = −⋅ = −⋅ = −⋅ = −
Osserviamo che ( 1a bm m⋅ = − ∧ am ≠ 0) ⇒ 1b
am
m= − .
Il numero 1am
− si chiama antireciproco di am .
La condizione di perpendicolarità fra due rette può essere, allora, formulata anche nel modo
seguente:
Due rette, non parallele agli assi cartesiani, sono perpendicolari se e solo se i loro coefficienti
angolari sono uno l’antireciproco dell’altro . In simboli:
a ⊥⊥⊥⊥ b ⇔⇔⇔⇔ 1b
a
mm
= −= −= −= −
PROVA TU
1) Quali, fra le seguenti rette, sono fra loro perpendicolari?
a) 3 24
y x= − + ; b) 5y x= ; c) 1 15
y x= − ; d) 5 2y x= − + ;
e) 3 44
y x= − ; f) 4 63
y x= − − ; g) 1 15
y x= − − ; h) 15
y x= − .
2) Scrivi l’equazione delle retta s perpendicolare alla retta t: 2 13
y x= − e passante per A(0,1).
OSSERVAZIONE
Nel paragrafo 11.10 abbiamo detto che l’equazione di una funzione può essere espressa in due
modo: in forma esplicita e in forma implicita.
Anche l’equazione di una retta, quindi, può essere espressa in forma implicita.

188
Per passare dalla forma esplicita a quella implicita basta applicare i principi di equivalenza delle
equazioni.
Completa:
Forma esplicita Forma implicita
2 1y x= − 2x – y – 1 = 0
4 13
y x= − − …………………
1 32 4
y x= − …………………
3y x= …………………
5y = …………………
2x = − …………………
Osserviamo la tabella:
• i polinomi della seconda colonna sono di ………….. grado;
• non tutti i polinomi della seconda colonna sono ……….………… .
In generale, l’equazione di una retta, in forma implicita, è un’equazione, ridotta a forma normale, nella quale
il primo membro è un polinomio in due variabili di primo grado, quindi è del tipo 0ax by c+ + = [a, b, c ∈
R ∧ (a,b) ≠ (0,0)].
Al variare dei coefficienti a, b, c nell’insieme dei numeri reali, otteniamo:
se a ≠ 0, b ≠ 0, c = 0 l’equazione diventa ……. + ……. = 0 ⇒ y = ……. : è l’equazione di una retta
………………………………………………………………………….. ;
se a ≠ 0, b = 0, c ≠ 0 l’equazione diventa ….…. + ….…. = 0 ⇒ x = ……. : è l’equazione di una retta
………………………………………………………………………….. ;
se a = 0, b ≠ 0, c ≠ 0 l’equazione diventa ….…. + ….…. = 0 ⇒ y = ……. : è l’equazione di una retta
………………………………………………………………………….. ;
se a ≠ 0, b = 0, c = 0 l’equazione diventa ………. = 0: è l’equazione di una retta
……………………………………………………………………….. ;
Se a = 0, b ≠ 0, c = 0 l’equazione diventa ………. = 0; è l’equazione di una retta
………………………………………………………………………….. .
Come puoi osservare, tutte le rette del piano cartesiano si possono ottenere dall’equazione 0ax by c+ + = ,
al variare di a, b, c nell’insieme dei numeri reali.

189
Come determinare il coefficiente angolare m e l’ordinata all’origine q della retta se la sua equazione è in
forma implicita?
E’ sufficiente scriverla in forma ……………… .
Ad esempio: qual è il coefficiente angolare della retta 2 1 0x y− + = ? E qual è l’ordinata all’origine?
2 1 0 ...... ..... ...... .......x y y y− + = ⇒ − = − ⇒ = + ; il suo coefficiente angolare è .......m= ; l’ordinata
all’origine è q = ……….. .
Generalizziamo e riscriviamo in forma esplicita l’equazione 0ax by c+ + = :
0ax by c+ + = ⇒ ....... ......by = − − ⇒ ..... .....yb b
= − − (quale condizione dobbiamo imporre?)
Allora,
• il coefficiente angolare è ;amb
= −= −= −= −
• l’ordinata all’origine è cqb
= −= −= −= − .
PROVA TU
La rappresentazione grafica delle seguenti equazioni è una retta; determinane il coefficiente
angolare e l’ordinata all’origine:
a) 6 3 1 0x y− + = ; b) 2 0x y− = ; c) 3 0x+ = ;
d) 3 1 0x y− − = ; e) 3 0y + = ; f) 2 5 7 0x y− − =
11.17 Equazioni: interpretazione grafica
Consideriamo l’equazione 4 2 3x x− = − + , poniamo la nostra attenzione sul primo e secondo
membro dell’equazione stessa.
� Primo membro: 4x – 2.
Il valore dell’espressione 4x – 2 dipende dal valore attribuito alla variabile x; tale espressione è,
dunque, una funzione. Sia, allora, f (x) = 4x – 2.
� Secondo membro: −x + 3.
Il valore dell’espressione −x + 3 dipende dal valore attribuito alla variabile x; tale espressione è,
dunque, una funzione. Sia, allora, g (x) = −x + 3.
Completa:
le funzioni f (x) e g(x) sono espresse da un polinomio di ….…… grado; la loro rappresentazione
grafica, dunque, è una ………… .
Indichiamo con a e b, rispettivamente, la rappresentazione grafica di f (x) e g(x) (fig. 62):

190
fig. 62
Dal momento che a bm m≠ , le rette a e b sono incidenti; sia P = a ∩ b.
Indichiamo con Px l’ascissa del punto P.
Osserviamo che:
• poichè P ∈ a, la sua ordinata si ottiene sostituendo, nell’espressione di f (x), alla variabile x
l’ascissa di P, quindi P P4 2y x= − ;
• poiché P ∈ b, la sua ordinata si ottiene sostituendo, nell’espressione di g(x), alla variabile x
l’ascissa di P, quindi P P 3y x= − + .
Si ottiene, allora, per la proprietà transitiva P P4 2 3x x− = − + ; in simboli:
P PP P
P P
P 4 24 2 3
P 3
a y xx x
b y x
∈ ⇒ = − ⇒ − = − +
∈ ⇒ = − +
L’ascissa del punto P rende vera l’uguaglianza 4x – 2 = −x + 3; quindi, Px è una soluzione
dell’equazione 4x – 2 = −x + 3.
Dalla fig. 62 deduciamo che P 1x = ; eseguiamo, allora, la verifica:
4 1 2 1 3⋅ − = − + ⇒ 4 2 2− = ⇒ 2 = 2
Possiamo, allora, affermare che:
la soluzione dell’equazione 4x – 2 = −−−−x + 3 è rappresentata dall’ascissa del punto intersezione
delle rette a e b.
Consideriamo, adesso, l’equazione 3x – 6 = 0 (equazione ridotta a forma normale).
Ripetendo il ragionamento fatto precedentemente, indichiamo con f (x) e g(x), rispettivamente, il
primo ed il secondo membro dell’equazione; quindi f (x) = 3x – 6 e g(x) = 0.

191
Entrambe le funzioni hanno, come rappresentazione grafica, una retta; in particolare la funzione
g(x) ha, come rappresentazione grafica, l’asse delle ascisse (fig. 63).
Indichiamo con s la rappresentazione
grafica di f(x).
fig. 63
La retta s e l’asse delle ascisse sono incidenti (perché?), sia T = s ∩ asse ascisse.
Osserviamo che:
• poiché T ∈asse delle ascisse, T 0y = ;
• poiché T ∈ s, la sua ordinata si ottiene sostituendo, nell’espressione di f(x), alla variabile x
l’ascissa di T, quindi T T3 6y x= − .
Si ottiene, allora, per la proprietà transitiva T3 6 0x − = ; in simboli:
TT
T T
T asse ascisse 03 6 0
T 3 6
yx
s y x
∈ ⇒ = ⇒ − =
∈ ⇒ = −
L’ascissa del punto T rende vera l’uguaglianza 3x – 6 = 0; quindi, Tx è una soluzione
dell’equazione 3x – 6 = 0.
Dalla fig. 63 deduciamo che T 2x = ; eseguiamo, allora, la verifica:
3 2 6 0⋅ − = ⇒ 6 6 0− = ⇒ 0 = 0
Possiamo, allora, affermare che:
la soluzione dell’equazione 3x – 6 = 0 è rappresentata dall’ascissa del punto intersezione della
retta s con l’asse delle ascisse.
Nei due esempi precedenti sono state prese in considerazione equazioni di primo grado, ma
l’interpretazione data ad esse può essere, ovviamente, estesa ad equazioni di qualsiasi tipo.

192
Possiamo, allora, generalizzare.
Indicati con f(x) e g(x), rispettivamente, il primo ed il secondo membro, un’equazione è una
uguaglianza del tipo f(x) = g(x).
Dal punto di vista grafico, le soluzioni di un’equazione sono rappresentate dalle ascisse dei punti
intersezione delle due funzioni f(x) e g(x);
in particolare, se l’equazione è ridotta a forma normale, quindi è del tipo f(x) = 0, le sue soluzioni
sono rappresentate dalle ascisse dei punti intersezione della funzione f(x) con l’asse delle ascisse.
Osserva, attentamente, i seguenti esempi:
Esempi
Risolviamo le seguenti equazioni:
a) 3 4 3 5x x− = + b) 5 3 3 2x x+ = −
a) Sia ( ) 3 4f x x= − e ( ) 3 5g x x= + .
Entrambe le funzioni f(x) e g(x) hanno come rappresentazione grafica una retta.
Osserviamo che le due rette hanno
• coefficiente angolare uguale;
• ordinata all’origine diversa.
Le due rette sono parallele e distinte e, quindi, non hanno punti in comune.
L’equazione non ha soluzioni. L’insieme soluzione è S = ∅.
b) Sia ( ) 5 3h x x= + e ( ) 3 2k x x= − .
Entrambe le funzioni h(x) e k(x) hanno come rappresentazione grafica una retta.
Osserviamo che le due rette hanno
• coefficiente angolare diverso;
• ordinata all’origine uguale.
Le due rette sono incidenti ed entrambe intersecano l’asse delle ordinate nel punto ( )P 0,3 .
Il punto P è, dunque, il punto intersezione delle rette h(x) e k(x); la soluzione dell’equazione è
rappresentata dall’ascissa del punto P e, dunque, la sua soluzione è 0x = . L’insieme soluzione è
{ }S 0= .
PROVA TU
Risolvi graficamente le seguenti equazioni:
a) 5 2 4x x− = − ; 3 9 1x x+ = − +
b) 8 2 0x− = ; 4 12 0x− =
c) 3 1x x+ = − ; 4 2 2 4x x− = +

193
ESERCIZI CAPITOLO 11
Il piano cartesiano
Conoscenza e comprensione
1) Che cosa si intende per numero irrazionale? E per numero reale?
2) Una sola delle seguenti affermazioni è corretta; quale?
a) Un numero razionale non è un numero reale.
b) Un numero reale può essere un numero razionale.
c) Un numero intero non è un numero reale.
d) Un numero reale è un numero razionale.
e) Un numero razionale è sempre minore di un numero reale.
3) Con quale insieme numerico sono in corrispondenza biunivoca i punti di una retta?
4) Come procedi per rappresentare un numero irrazionale?
5) Rappresenta i seguenti numeri reali:
2π ; 6− ; 23; 154
; 2 5
6) Completa inserendo i simboli >, < in modo che le seguenti relazioni siano vere:
a) ..... 8π ; b) 1 ..... 12
− − ; c) 65 .....3π ; d) 3.....2 2π− −
7) Che cosa si intende per sistema di ascisse su una retta?
8) Siano ( )AA x e ( )BB x due punti di una retta orientata. Una sola delle seguenti affermazioni è
corretta; quale?
a) A BAB x x= − ; b) A BAB x x= − ; c) B AAB x x= + ;
d) B AAB x x= ⋅ e) B AAB x x= − .
9) Siano ( )AA x e ( )BB x due punti di una retta orientata e M il punto medio del segmento AB. Una
sola delle seguenti affermazioni è corretta; quale?
a) A BM 2
x xx
⋅= ; b) A BM 2
x xx
−= ; c) M A Bx x x= + ;
d) B AM 2
x xx
+= ; e) ( )M B A2x x x= + .
10) Che cosa si intende per sistema di riferimento cartesiano ortogonale?
11) Che cosa si intende per ascissa di un punto nel piano cartesiano? E per ordinata?
12) In quali quadranti le coordinate di un punto sono concordi?
13) In quali quadranti le coordinate di un punto sono discordi?

194
14) L’ascissa di un punto P di un piano cartesiano non è negativa. Quale delle seguenti affermazioni è
sicuramente falsa?
a) Il punto P è un punto dell’asse delle ascisse;
b) il punto P è un punto del IV quadrante;
c) il punto P è un punto dell’asse delle ordinate;
d) il punto P è un punto del I quadrante;
e) il punto P è un punto del II quadrante.
15) L’ordinata di un punto P di un piano cartesiano non è positiva. Quale delle seguenti affermazioni
è sicuramente falsa?
a) Il punto P è un punto dell’asse delle ascisse;
b) il punto P è un punto del IV quadrante;
c) il punto P è un punto dell’asse delle ordinate;
d) il punto P è un punto del I quadrante;
e) il punto P è un punto del III quadrante.
16) Vero o Falso?
a) Il punto P(2, −h) non è un punto del I quadrante . V F
b) Se k < 0, il punto T(−k, −3) è un punto del IV quadrante. V F
c) Sia G(−b, c), se c ≤ 0 allora G è un punto del III quadrante. V F
d) Il punto H(2a, 3) non è un punto dell’asse y. V F
e) Se p ≥ 0 e s ≤ 0, allora il punto Q(p, s) può coincidere con l’origine degli assi. V F
f) Se b ≥ 2, S(b – 2, −1) è un punto dell’asse y o è del I quadrante. V F
g) B(m, −2m) è sicuramente un punto del II o del IV quadrante. V F
17) Vero o Falso?
Siano A( )A A,x y e B( )B B,x y due punti di un piano cartesiano.
a) A Bx x= ⇒ AB ∩ asse y = ∅ V F
b) ( )A B A B, discordix x y y= ∧ ⇒ AB ∩ asse x = ∅ V F
c) A B, discordix x ⇒ AB ∩ asse x ≠ ∅ V F
d) A Bx x= ⇒ AB parallelo all’asse delle ordinate V F
e) AB parallelo asse delle ascisse ⇒ A By y= V F
f) AB non parallelo all’asse delle ascisse ⇒ A Bx x≠ V F

195
18) Siano F(h, h – 1) e G(h + 1, 2h) due punti di un piano cartesiano; le seguenti affermazioni sono
vere o false?
a) Il segmento FG non può essere parallelo ad alcuno dei due assi cartesiani. V F
b) Il triangolo OFG, dove O è l’origine degli assi, può essere rettangolo. V F
c) Se h < 0, i punti del segmento FG non appartengono al I quadrante. V F
d) Se h ≥ 1, tutti i punti del segmento FG sono situati nel I quadrante. V F
19) Siano A( )A,h y e B( )B,h y due punti di un piano cartesiano; una sola delle seguenti affermazioni
è corretta:
a) A BAB y y= − ;
b) B AAB y y= − ;
c) AB 2h= ;
d) A BAB y y= − ;
e) A BAB y y= +
20) Come si calcola la lunghezza di un segmento non parallelo ad alcuno degli assi cartesiani?
21) Siano F( )6,8− e P( )5,4m− ; per quale valore di m la lunghezza di FP è 4?
a) −2; b) 2; c) −3; d) −1; e) 3
22) Le seguenti proposizioni si riferiscono al triangolo di vertici A( )2,2 , B( )8,2 e C( )2, 6− ; una sola
di esse è falsa. Quale?
a) Il suo perimetro misura 24;
b) la sua area misura 24;
c) è un triangolo rettangolo;
d) il triplo dell’ipotenusa è cinque volte il cateto minore;
e) almeno una delle precedenti proposizioni è falsa.
23) Come determini le coordinate del punto medio di un segmento nel piano cartesiano?
24) Del segmento di estremi K( )4 3,7 5
− e Q( )3 5,7 3
− si può dire che:
a) è parallelo all’asse x;
b) è perpendicolare all’asse x;
c) la sua lunghezza è 215
;
d) il suo punto medio è un punto del II quadrante;
e) il suo punto medio ha coordinate ( )161,10
−

196
25) Come determini le coordinate del baricentro di un triangolo?
26) Il baricentro del triangolo di vertici D( )1, 2− , M ( )3,0− , T( )2,5 :
a) è un punto del I quadrante;
b) è un punto dell’asse delle ascisse;
c) ha coordinate ( )1,0 ;
d) ha coordinate ( )1,0− ;
e) è un punto dell’asse delle ordinate.
27) Le seguenti affermazioni si riferiscono al triangolo di vertici A( )1 ,02
, B( )3 13,10 5
− − e C( )0, 3− ;
una sola di esse è vera. Quale?
a) è un triangolo isoscele;
b) è un triangolo rettangolo;
c) il suo baricentro ha coordinate ( )1 28,15 15
− −
d) uno dei punti medi dei suoi lati ha coordinate ( )1 28,5 5
− ;
e) tutte le precedenti affermazioni sono false.
28) Qual è l’equazione di una retta, non parallela agli assi cartesiani, in forma esplicita? E quale quella
in forma implicita?
29) Una sola delle seguenti affermazioni è falsa; quale?
a) ∀ m, q ∈ R, la rappresentazione grafica della funzione y = mx + q è una retta.
b) Tutte le rette del piano hanno equazione del tipo y = mx + q (m, q ∈ R).
c) Una retta parallela all’asse delle ordinate ha equazione del tipo x = q.
d) ∀ m∈ R, la rappresentazione grafica della funzione y = mx è una retta passante per l’origine
degli assi.
e) L’asse delle ascisse ha equazione y = 0 .
30) Qual è il significato del coefficiente di x e del termine noto nell’equazione di una retta in forma
esplicita?
31) Se l’equazione di una retta, non parallela all’asse delle ordinate, è espressa in forma implicita, qual
è il suo coefficiente angolare?
32) Siano A( )A A,x y e B( )B B,x y due punti di un piano cartesiano; allora il coefficiente angolare m
della retta passante per A e per B è:
a) A B
B A
;y y
mx x
−= − b) A B
A B
y ym
x x+= + ; c) B A
B A
y ym
x x−= − ; d) B A
B A
x xm
y y−= −

197
33) Quale relazione esiste fra i coefficienti angolari di due rette fra loro perpendicolari? E fra i
coefficienti angolari di due rette parallele?
34) Vero o Falso?
a) Una retta passante per l’origine degli assi ha equazione y = mx. V F
b) Se una retta ha equazione y = x, la retta è la bisettrice del I e III quadrante. V F
c) Se una retta ha equazione x + y = 0, la retta è la bisettrice del II e IV quadrante. V F
d) Tutte le rette passanti per l’origine degli assi hanno equazione del tipo V F
ax + by = 0.
e) Se l’equazione di una retta è del tipo y = mx + q, il punto intersezione della V F
retta con l’asse delle ordinate ha coordinate (0, q).
f) Se l’equazione di una retta è del tipo ax + by + c = 0, il punto intersezione V F
della retta con l’asse delle ordinate ha coordinate (0, c).
g) Se l’equazione di una retta è del tipo ax + by + c = 0, il punto intersezione V F
della retta con l’asse delle ascisse ha coordinate (c, 0).
h) Una retta parallela all’asse delle ordinate ha coefficiente angolare zero. V F
i) Una retta parallela all’asse delle ascisse ha coefficiente angolare zero. V F
j) Se il coefficiente angolare di una retta è −1, la retta è parallela alla bisettrice V F
del II e IV quadrante.
k) Se il coefficiente angolare di una retta è 1, la retta è perpendicolare alla V F
bisettrice del I e III quadrante.
l) Se una retta forma con la direzione positiva dell’asse delle ascisse un angolo V F
ottuso, il suo coefficiente angolare è negativo.
m) Due rette sono perpendicolari se il rapporto fra i loro coefficienti angolari V F
è −1.
n) Le rette di equazioni ax + by + c = 0 e bx − ay + 2c = 0 sono perpendicolari. V F
35) Indicati con α l’angolo che una retta forma con la direzione positiva dell’asse delle ascisse e con
m il suo coefficiente angolare, quale delle seguenti proposizioni è vera?
a) m < −1 ⇒ 90° < α < 135°;
b) m = 1 ⇒ α ≤ 45°;
c) α = 90° ⇒ m = 0;
d) α > 45° ⇒ m > 0;
e) α < 45° ⇒ m < 0

198
36) Una sola, fra le seguenti rette, non è perpendicolare alla retta : 4 5 1 0a x y − + = . Quale?
a) :5 4 6 0b x y − − = ;
b) 3 10:8
xd y − = ;
c) 5: 24
g y x = − + ;
d) : 4 9 0m x y 5 + − = ;
e) : 15 0h y x 8 −12 − = .
37) Della retta :3 2 3 0t x y − + = possiamo dire che:
a) passa per P( )0,1 ;
b) è perpendicolare alla retta di equazione 6 9 1 0y x− + = ;
c) forma, con la direzione positiva dell’asse delle ascisse, un angolo maggiore di 45°;
d) è parallela alla retta di equazione 2 13
y x= + ;
e) è perpendicolare alla bisettrice del I e III quadrante.
38) Siano α, β e γ gli angoli che le rette : 5 0r x y − + = , : 4 5 0s x y 3 − + = , : 2 3 0t y x − = ,
rispettivamente, formano con la direzione positiva dell’asse delle ascisse. Quale delle seguenti
relazioni è vera?
a) α < β < γ; b) β < α < γ; c) β = γ ∧ β < α; d) β < γ <α; e) γ < β <α.
39) Una retta passa per A( )1,0− e H( )1,3− ; qual è la sua equazione?
a) 3 0x− = ;
b) 1y = − ;
c) 4 4 0x+ = ;
d) 3 0x y+ − = ;
e) 1 0x− = .
40) Una retta passa per C( )3,0− ed è perpendicolare alla retta passante per H( )1, 1− − e T( )2,2 ; allora
possiamo dire che:
a) è parallela alla bisettrice del I e III quadrante;
b) l’ordinata all’origine è −3;
c) ha coefficiente angolare 3;
d) è perpendicolare alla retta : 2 6 3 0s x y − + = ;
e) è parallela alla bisettrice del II e IV quadrante.
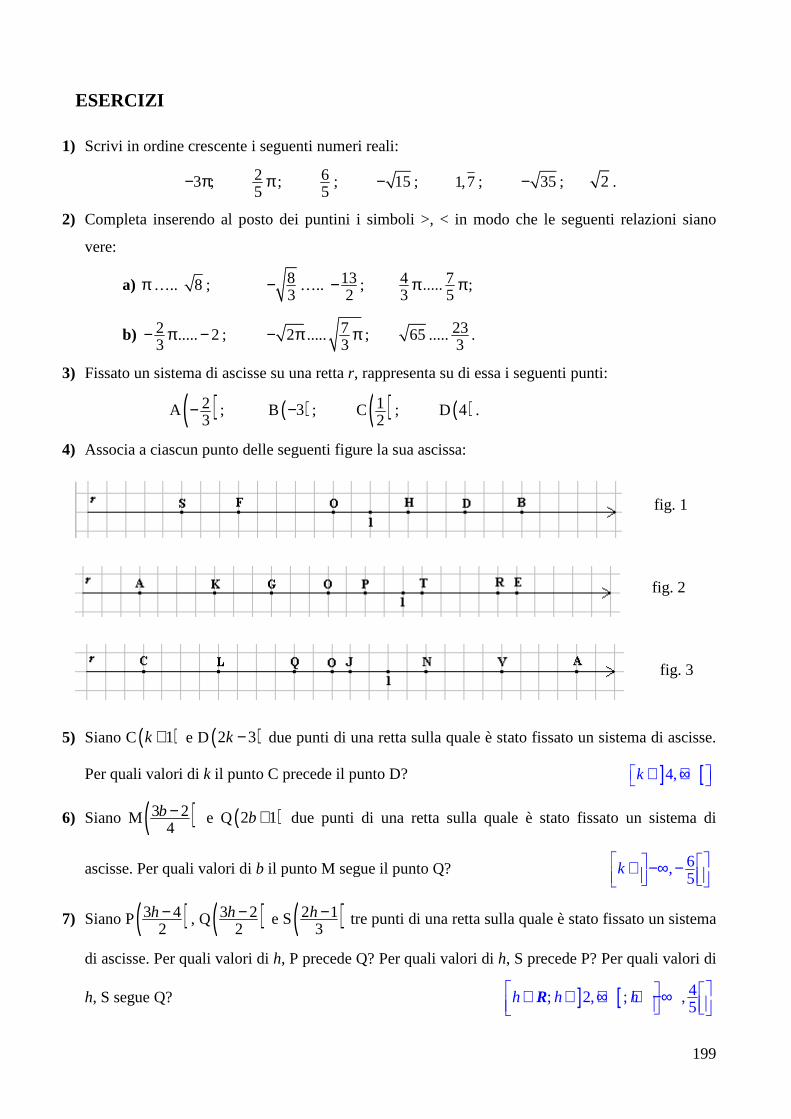
199
ESERCIZI
1) Scrivi in ordine crescente i seguenti numeri reali:
−3π; 25
π ; 65
; 15− ; 1,7; 35− ; 2 .
2) Completa inserendo al posto dei puntini i simboli >, < in modo che le seguenti relazioni siano
vere:
a) π ….. 8 ; 83
− ….. 132
− ; 4 73 5
π ..... π ;
b) 2 ..... 23
− π − ; 72 .....3
− π π ; 2365 .....3
.
3) Fissato un sistema di ascisse su una retta r, rappresenta su di essa i seguenti punti:
A ( )23
− ; B( )3− ; C( )12
; D( )4 .
4) Associa a ciascun punto delle seguenti figure la sua ascissa:
fig. 1
fig. 2
fig. 3
5) Siano C( )1k + e D( )2 3k − due punti di una retta sulla quale è stato fissato un sistema di ascisse.
Per quali valori di k il punto C precede il punto D? ] [4,k ∈ +∞
6) Siano M( )3 24
b− e Q( )2 1b+ due punti di una retta sulla quale è stato fissato un sistema di
ascisse. Per quali valori di b il punto M segue il punto Q? 6,5
k ∈ −∞ −
7) Siano P( )3 42
h− , Q( )3 22
h− e S( )2 13
h− tre punti di una retta sulla quale è stato fissato un sistema
di ascisse. Per quali valori di h, P precede Q? Per quali valori di h, S precede P? Per quali valori di
h, S segue Q? ] [ 4; 2, ; ,5
h h h ∈ ∈ +∞ ∈ −∞
R
200
8) Calcola la distanza fra i punti, distinti dall’origine, delle seguenti figure:
fig. 4
fig. 5
fig.6
9) Sia a una retta sulla quale è stato fissato un sistema di ascisse; determina la distanza fra le seguenti
coppie di punti:
a) E( )122
− ; G( )2,3+ b) F( )52
− ; H( )43
−
c) K ( )2 13
+ ; M( )1,23 d) P( )2− ; T( )45
+
10) Sia s una retta sulla quale è stato fissato un sistema di ascisse; dopo aver rappresentato su di essa i
punti A( )32
− , B( )23
+ , C( )3− , D( )5− , determina la lunghezza dei segmenti AB, BC, AD, CD.
11) Siano T( )4− e B due punti di una retta sulla quale è stato fissato un sistema di ascisse tali che B
segue T e TB 6= . Qual è l’ascissa di B? ( )B 2 +
12) Siano F( )53
+ e K due punti di una retta sulla quale è stato fissato un sistema di ascisse. Determina
l’ascissa di K sapendo che esso precede F e che KF 6= . ( )13K3
−
13) Siano G( )37
− e H due punti di una retta sulla quale è stato fissato un sistema di ascisse.
Determina l’ascissa di H sapendo che GH 4= . (Distingui i due casi: H precede G; H segue G)
( ) ( )31 25H H7 7
− ∨ +
14) L’ascissa di un punto P di una retta s sulla quale è stato fissato un sistema di ascisse è 136
− . Qual
è l’ascissa dei punti G e H che hanno distanza 4 dal punto P? ( ) ( )11 37G H6 6
∨ −

201
Esempio
Siano A( )23
− e B( )4+ due punti di una retta sulla quale è stato fissato un sistema di ascisse.
Determina l’ascissa del punto P, interno al segmento AB, tale che il triplo del segmento AP sia
congruente alla metà del segmento AB.
Risolviamo il problema schematizzando i passaggi da eseguire:
1. Individuare la richiesta del problema → ascissa del punto P
2. Assegnare incognita → ascissa di P: x
3. Porre condizioni accettabilità → P interno ad AB ⇒ x ∈∈∈∈ Q / 2 43
− < <− < <− < <− < <x
4. Scrivere altri elementi in funzione di x → AP : ( )23
x− − ; AB : ( )243
− −
5. Impostare equazione risolvente →
Triplo di AP congruente alla metà di AB
3 AP ≅ 12
AB ⇒ 13AP AB2
=
( ) ( )2 23AP 3 33 3
x x = − − = +
( ) ( )1 1 2 1 2AB 4 42 2 3 2 3
= − − = +
Equazione:
( ) ( )2 1 23 43 2 3
x+ = +
6. Risolvere l’equazione → ( ) ( )2 1 23 4
3 2 3x+ = + ⇒ 1 143 2
2 3x+ = ⋅ ⇒
⇒ 73 23
x = − + ⇒ 133
x = ⇒ 19
x =
7. Controllare accettabilità della
soluzione →
19
∈∈∈∈ Q ∧ 2 1 43 9
− < < ;
la soluzione è accettabile.
8. Scrivere insieme soluzione o risposta → L’ascissa di P è 19
15) Sia s una retta sulla quale è stato fissato un sistema di ascisse. Determina l’ascissa di un punto K
equidistante dall’origine e dal punto A( )45
. ( )2K5
16) Sia r una retta sulla quale è stato fissato un sistema di ascisse. Determina l’ascissa del punto C di r
sapendo che C precede O e che OC è il triplo di OF, dove F ha ascissa 79
. ( )7C3
−
17) Sia r una retta sulla quale è stato fissato un sistema di ascisse. Determina l’ascissa del punto P
della retta r equidistante dai punti E( )34
− e H( )12
+ . ( )1P8
−

202
18) Siano D( )3+ e H( )65
− due punti di una retta t; determina l’ascissa del punto S della retta t
equidistante dai punti D e H. ( )9S10
19) Siano A( )32
− e B( )56
− due punti della retta a sulla quale è stato fissato un sistema di ascisse.
Determina l’ascissa del punto Q, interno al segmento AB, tale che il triplo del segmento AQ sia
congruente al doppio del segmento AB. ( )19Q18
−
20) Siano F( )1− e L( )34
+ due punti di una retta sulla quale è stato fissato un sistema di ascisse; sia B
un punto che precede F. Determina l’ascissa di B in modo tale che il triplo del segmento BF sia
congruente al doppio del segmento FL. ( )13B6
−
21) Siano M( )52
− e P( )74
due punti di una retta sulla quale è stato fissato un sistema di ascisse.
Determina l’ascissa di un punto Q, interno a MP, in modo che il segmento differenza fra MQ e QP
misuri 134
. ( )5Q4
22) Siano A( )6+ e B( )32
+ due punti di una retta sulla quale è stato fissato un sistema di ascisse.
Determina l’ascissa di un punto C sapendo che C segue A e BC ≅ 169
AB. ( )19C2
23) Siano D( )2− e F( )83
+ due punti della retta b sulla quale è stato fissato un sistema di ascisse.
Determina l’ascissa di un punto L della retta b sapendo che 5LD 2DF≅ . (Distingui i due casi: L
esterno aDF ; L interno a DF ). ( ) ( )58 2L L15 15
− ∨ −
24) Dati i punti S( )4+ e T( )113
− di una retta sulla quale è stato fissato un sistema di ascisse,
determina l’ascissa del punto V, interno al segmento ST, in modo che il rapporto fra VS e TV
valga 3. ( )7V4
−
25) Siano M( )7− , F( )1− e P tre punti di una retta sulla quale è stato fissato un sistema di ascisse.
Qual è l’ascissa di P se F divide MP in parti proporzionali ai numeri 4 e 7? ( )19P2

203
26) Siano A( )4− e B( )12
− due punti di una retta sulla quale è stato fissato un sistema di ascisse; sia D
un punto che divide il segmento AB in parti proporzionali ai numeri 3 e 4. Qual è l’ascissa di D?
( )5D2
−
27) Siano G( )32
+ e F( )1k − due punti di una retta sulla quale è stato fissato un sistema di ascisse; per
quale valore di k la distanza fra G ed F vale 72
? (Osserva che non è indicata la posizione di F
rispetto a G). [ ]1k k= 6 ∨ = −
28) Siano M( )2 3a − e Q( )4 3a− due punti di una retta sulla quale è stato fissato un sistema di ascisse.
Determina il valore di a in modo che MQ 3= . 425
a a = ∨ =
29) Siano D( )4 2h− e G( )5h+ due punti di una retta sulla quale è stato fissato un sistema di ascisse.
Per quale valore di h il punto P( )3+ è equidistante da D e da G? 35
h =
30) Siano D( )3 2m− e G( )57
due punti di una retta sulla quale è stato fissato un sistema di ascisse.
Determina per quale valore di m il punto K( )1m− divide il segmento DG in due parti tali che
5DK ≅ 2KG. 1156
m =
31) Siano P( )2 1a− e Q( )5+ due punti di una retta sulla quale è stato fissato un sistema di ascisse. Per
quale valore di a il punto T( )32
+ divide il segmento PQ in parti proporzionali ai numeri 1 e 2?
38
a =
32) A ( )125
− , B( )2 13
k − , C( )35
+ e D( )95
+ sono punti di una retta sulla quale è stato fissato un
sistema di ascisse.
a) Se A precede B, per quale valore di k il segmento AB è doppio del segmento CD?
b) Se A precede B, per quale valore di k il segmento differenza fra AB e CD misura 3?
c) Se A segue B, per quale valore di k i segmenti AB e CD sono proporzionali ai numeri 3 e 4?
d) Se A segue B, per quale valore di k il segmento somma fra AB e CD misura 5?
1 16 89 44a) ; b ; c ; d2 5 20 5
k k k = ) = ) = − ) −

204
Per ciascuna delle seguenti coppie di punti di una retta, sulla quale è stato fissato un sistema di
ascisse, determina l’ascissa del punto medio:
33) A ( )3− B( )5− ; F( )2+ H( )8+ .
34) D ( )34
− E( )58
+ ; K( )59
− P( )43
− .
35) C( )1,2+ M ( )29
− ; Q( )35
− T( )2− .
36) R( )2,3+ S( )1,2 ; V( )73
+ N( )3+ .
Esempio
Sia M( )4+ il punto medio del segmento AB, essendo A( )1− ; determiniamo l’ascissa del punto B.
Risolviamo il problema schematizzando i passaggi da eseguire:
1. Individuare la richiesta del problema → ascissa del punto B
2. Assegnare incognita → ascissa di B: x
3. Porre condizioni accettabilità → B segue M ⇒ x ∈∈∈∈ Q / x > 4
4. Scrivere altri elementi in funzione di x → A BM M
12 2
x x xx x+ − += ⇒ =
5. Impostare equazione risolvente → 142
x− +=
6. Risolvere l’equazione → 14 8 1 92
x x x− += ⇒ = − + ⇒ =
7. Controllare accettabilità della
soluzione → 9 ∈∈∈∈ Q ∧ 9 > 4 ;
la soluzione è accettabile.
8. Scrivere insieme soluzione o risposta → L’ascissa di B è 9
Indicato con M il punto medio di un segmento AB, determina l’ascissa dell’estremo mancante:
37) A ( )3− M( )12
− ; A( )23
− M( )14
+ .
38) B ( )910
− M ( )34
− ; B( )2+ M( )3− .
39) A ( )2,5+ M ( )34
− ; B( )52
+ M( )0,5− .

205
Rappresenta i seguenti punti in un piano nel quale è fissato un sistema di assi cartesiani
ortogonali:
40) S( )3, 1− + ; M ( )2, 5+ − ; Q( )0, 3− .
41) P( )2,03
− ; T( )5,16
; N( )5, 32
− .
42) D ( )2,0 ; G( )3 1,5 3
− − ; K ( )14,2
+ − .
43) A ( )12,65
− ; F( )40,9
; H( )0,0
44) Scrivi le coordinate dei punti rappresentati nelle seguenti figure:
fig.7
i.
fig. 8
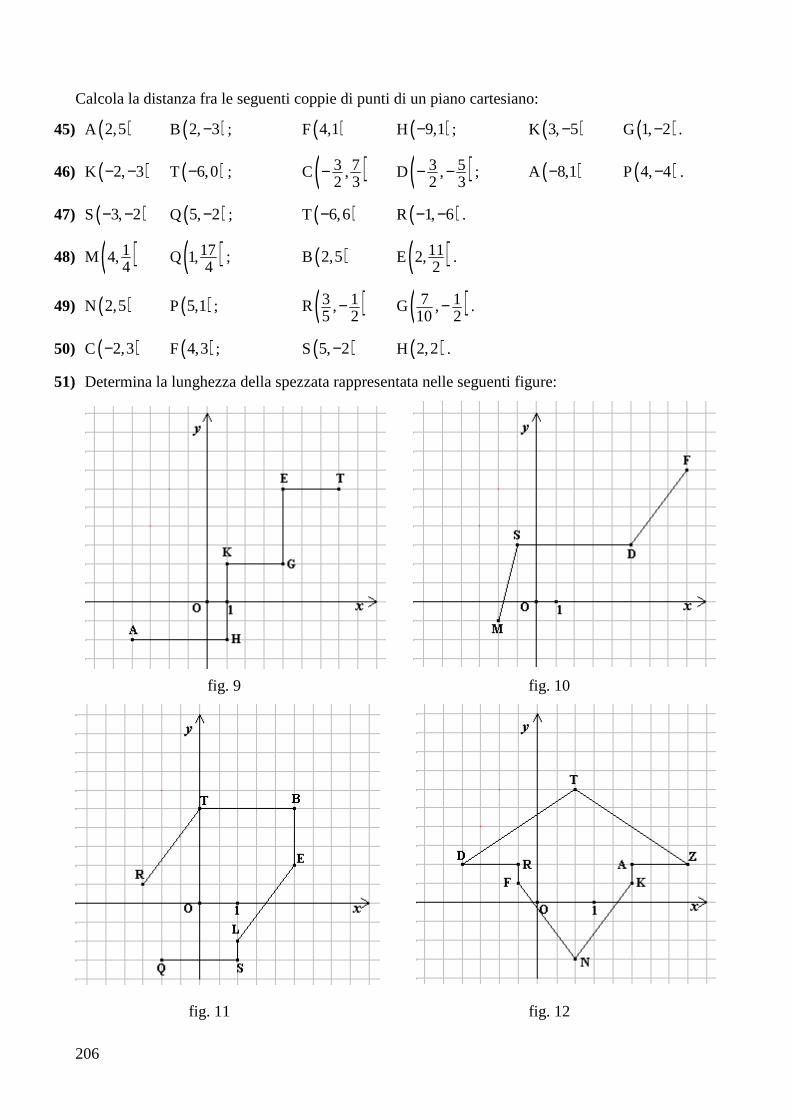
206
Calcola la distanza fra le seguenti coppie di punti di un piano cartesiano:
45) A ( )2,5 B( )2, 3− ; F( )4,1 H( )9,1− ; K( )3, 5− G( )1, 2− .
46) K ( )2, 3− − T( )6,0− ; C( )3 7,2 3
− D( )3 5,2 3
− − ; A( )8,1− P( )4, 4− .
47) S( )3, 2− − Q( )5, 2− ; T( )6,6− R( )1, 6− − .
48) M ( )14,4
Q( )171,4
; B( )2,5 E( )112,2
.
49) N ( )2,5 P( )5,1 ; R( )3 1,5 2
− G( )7 1,10 2
− .
50) C( )2,3− F( )4,3 ; S( )5, 2− H( )2,2 .
51) Determina la lunghezza della spezzata rappresentata nelle seguenti figure:
fig. 9 fig. 10
fig. 11 fig. 12

207
Esempio
Siano A( )2, 3− e B( )5,h due punti di un piano cartesiano. Determina il valore di h affinchè la
lunghezza del segmento AB sia 5.
Risolviamo il problema schematizzando i passaggi da eseguire:
1. Individuare la richiesta del problema
→ ordinata del punto B
2. Assegnare incognita → ordinata di B: h
3. Porre condizioni accettabilità → h ∈∈∈∈ Q
4. Scrivere altri elementi in
funzione di x →
( )( ) ( ) ( ) ( ) ( )
2
2 2 2 2 2
A B A B
AB 5 AB 25
AB 2 5 3x x y y h
= ⇒ =
= − + − = − + − −
5. Impostare equazione risolvente → ( ) ( )2 22 5 3 25h− + − − =
6. Risolvere l’equazione →
( ) ( )( )( )
{ }
2 2 2
2
2 5 3 25 9 9 6 25
6 7 0 7 1 0
7 0 1 0 1
S 7,1
h h h
h h h h
h h h h
− + − − = ⇒ + + + = ⇒
⇒ + − = ⇒ + − = ⇒⇒ + = ∨ − = ⇒ = −7 ∨ = ⇒⇒ = −
7. Controllare accettabilità della
soluzione → 1 ∈∈∈∈ Q ⇒ 1 soluzione accettabile;
−−−−7 ∈∈∈∈ Q ⇒ −−−−7 soluzione accettabile.
8. Scrivere insieme soluzione o
risposta →
Il problema ha due soluzioni: B ( )5,1 ∨ B( )5, 7− .
52) Siano A( )12,0 e B( )6,a due punti di un piano cartesiano. Determina il valore di a affinchè la
lunghezza del segmento AB sia 10. [ ]8a = ±
53) Siano C( )2, 3− e D( )3,m− due punti di un piano cartesiano. Determina il valore di m affinchè la
lunghezza del segmento CD sia 13. [ ]9 15m m= − ∨ =
54) Siano A( )1 ,22
− e B( ),0k due punti di un piano cartesiano. Per quale valore di k il punto B dista
52
da A? [ ]2 1k k= − ∨ =
55) Per quale valore di b la lunghezza del segmento di estremi P( )3 ,2
b e S( )7 9,6 4
− − è 103
?
17 14 4
b b = − ∨ = −

208
56) Siano A( )3,5− , B( )9, 11− , C( )2,3− e D( )4,b punti di un piano cartesiano; per quale valore di b
il segmento AB è doppio del segmento CD? [ ]5 11b b= − ∨ =
57) Siano A( )1,2− , B( )8,2a , C( )4, 12− − e D( )11,8 punti di un piano cartesiano. Per quale valore di
a i segmenti AB e CD sono proporzionali ai numeri 3 e 5? [ ]5 7a a= − ∨ =
58) Qual è il perimetro del triangolo di vertici F( )3,2− , G( )3,2 e M( )0, 2− ? [16]
59) Siano A( )3, 5− , B( )3,1 e C( )1, 2− − i vertici di un triangolo. Qual è il suo perimetro? [16]
60) Qual è il perimetro del triangolo di vertici F( )1,3 , H( )1,7 e G( )2,7− ? E la sua area? [12, 6]
61) Siano R( )2,1 , T( )8,1 e Q( )3,h i vertici di un triangolo. Per quale valore di h l’area del triangolo
misura 9? [ ]2 4h h= − ∨ =
62) Il triangolo di vertici A( )0,3 , B( )2,7 e C( )6,5 è isoscele? Perché?
63) Il punto K è un punto dell’asse y ed è equidistante dai punti M( )1, 1− − e P( )4,2 ; quali sono le
sue coordinate? ( )K 0,3
64) Determina il perimetro del quadrilatero di vertici H ( )8,14− , G( )0, 1− , K ( )12,8 e F( )4,23 [64]
65) Per quale valore di a il punto D( ), 1a − è equidistante dai punti E( )0,1 e G( )4,3− ? 72
a = −
66) Verifica che il triangolo di vertici G( )1,4 , H( )3,3 e F( )1,0− è un triangolo rettangolo.
(Suggerimento: se un triangolo è rettangolo, i suoi lati devono verificare il teorema di Pitagora.)
67) Il punto C è equidistante dai punti A( )2, 3− e B( )1, 2− . Determina le coordinate di C sapendo che
l’ordinata è la metà dell’ascissa. ( )C 8,4
Determina le coordinate del punto medio dei segmenti che hanno per estremi le seguenti coppie di
punti:
68) T ( )5, 3− − S( )4, 1− ; N( )2,3− D( )6,2− .
69) A ( )6,10− B( )4, 3− ; K( )3,15
− M( )1 1,10 2
− .
70) F( )5 3,12 5
H( )3 3,8 2
− ; C( )2, 5− − L( )6, 8− − .
71) R( )1,3 P( )1 7,2 2
; D( )1 2,2 3
− G( )3 4,2 3
.

209
Indicato con M il punto medio di un segmento, determina le coordinate dell’estremo mancante:
72) A ( )1 , 52
− M( )13 1,2 2
− ; D ( )21,
3− M( )5 1,
6 12.
73) B ( )2, 2− − M( )0,0 ; M( )5 ,52
P( )11,112
.
74) F( )13,4
− M( )3 1,2 2
; M( )1 ,02
S( )1 1,3 3
− .
75) Siano F( )2 1,0k − e H( )3,1 due punti di un piano nel quale è stato fissato un sistema di assi
cartesiani ortogonali. Per quale valore di k, l’ascissa del punto medio G del segmento FH è 12
?
Determina le coordinate di G per il valore di k determinato. ( )1 1 1; G ,2 2 2
k = −
76) Per quale valore di h, il punto medio del segmento di estremi A( ),2 1h h− e B( )2,3h h− è tale che
la sua ascissa è il triplo dell’ordinata? 113
h =
77) Sia M( )2 , 1a a− il punto medio del segmento AB, dove A ha coordinate ( )2, 3a+ . Determina le
coordinate del punto B sapendo che la sua ascissa è i 23
dell’ordinata. ( )22 33B ,5 5
− −
78) Siano D( )13 ,2
kk + , F( ),0k punti di un piano cartesiano; sia B un punto la cui ascissa è uguale alla
sua ordinata. Determina il valore di k per il quale F è il punto medio del segmento DB. [ ]1k =
79) Siano P( )10,7− , Q( )8,5− e R( )12,1− i vertici di un triangolo. Determina la misura della
mediana relativa al lato QR. [4]
80) Siano F( )2, 1− − , G( )2,0 , H( )7, 9− tre vertici consecutivi del parallelogramma FGHK; quali sono
le coordinate del vertice K? ( )K 3, 10 −
81) Sia M il punto medio dell’ipotenusa del triangolo rettangolo di vertici D( )3,5 , E( )9,5 , G( )3, 3− .
Verifica che i triangoli DMG e DME sono isosceli.
82) Verifica che il triangolo di vertici H( )1,3− , M ( )5,0− e P( )1, 3− − è isoscele; successivamente
calcola il suo perimetro e la sua area. [16; 12]
83) I punti G( )2, 2− , K ( )5,2 e S( )8, 2− sono i vertici di un triangolo. Verifica che esso è isoscele.
Indicati con P e T i punti medi, rispettivamente, della base e di uno dei lati obliqui, verifica che il
lato obliquo è il doppio del segmento PT.

210
Determina le coordinate del baricentro dei triangoli aventi per vertici le seguenti terne di punti:
84) A ( )3,6 F( )0, 3− T( )6,0
85) D ( )5, 2− − G( )3, 52
− − K( )1 ,12
86) E( )1,6− L( )2,0 N( )8,5
87) H ( )3,14
B( )5 , 14
− S( )3,04
−
88) C( )1 3,2 5
− R( )7 2,4 3
Q( )40,5
−
Nelle seguenti terne di punti, G indica il baricentro di un triangolo e gli altri punti sono due dei
tre vertici del triangolo; determina le coordinate del terzo vertice del triangolo:
89) A ( )3, 2− − B( )2, 2− G( )0, 1−
90) K ( )2,4− F( )1,1 G( )2 1,3 3
91) G( )70,3
D( )1,3 F( )1,0−
92) L ( )4 12,5 5
G( )4,23
Q( )6 8,5 5
93) S( )1,2 N( )0, 3− G( )11,3
−
94) Dato l’insieme A ={ }/ 0 8a a∈ < ≤N . Rappresenta, nel piano cartesiano, la funzione da A verso N
espressa dall’equazione 3 1 0x y− + = .
95) Sia B = { }/ 5 7m m∈ − ≤ <Z . Rappresenta, nel piano cartesiano, la funzione da B verso Z espressa
dall’equazione 2 2y x x= − .
96) Sia H = { }/ 3 9b b∈ − < <Z ; rappresenta, nel piano cartesiano la funzione, da H verso Z, espressa
dall’equazione 4 3y x= − .
97) Rappresenta, nel piano cartesiano, la funzione da { }0−R
verso R espressa dall’equazione
2 0x xy− − = .
98) Rappresenta, nel piano cartesiano, la funzione, da R verso R, espressa dall’equazione 4 5y x= − .
99) Rappresenta, nel piano cartesiano, la funzione, da R verso R, espressa dall’equazione 2 2 4x y+ = .
100) Rappresenta, nel piano cartesiano, la funzione, da R verso R, 22 3 0x y x− + − = .
101) Rappresenta, nel piano cartesiano, la funzione, da R verso R, 1 32 4
y x= − .

211
Stabilisci, per ciascuna delle seguenti funzioni, se i punti a fianco indicati appartengono alla loro
rappresentazione grafica:
102) 3 2y x= − D( )1, 5− − ; M( )0,2 ; T( )2, 43
− − ; H( )1 1,2 2
− .
103) 22 3 1y x x= + − A( )0, 1− ; F( )2,1− ; B( )3,8− ; S( )2,15 .
104) 3 5 9 0x y+ − = H( )3,0 ; C( )2, 3− − ; R( )3 7,2 5
; L( )1 8,5 3
.
105) 2 2
2x xyx
− += − E( )0, 2− ; K( )3, 3− ; P( )2,0− ; V( )1 1− .
106) 2 3 5 0x xy x+ − + = Q( )32,2
− ; B( )1,9− ; G( )1 15,2 2
; L( )32,2
− .
107) 2 22 4 8 0x y x y+ − + − = H( )0,8 ; R( )2,4 ; J( )3,4 ; F( )3,2 .
108) 2 1 0y y x+ − + = F( )15, 3− − ; K( )1 11,2 4
− ; T( )5, 2− − ; N( )5,2− .
109) 2 2 3 0x y x y+ − = C( )1,2− ; S( )2, 4− ; A( )1 3,3 13
− ; P( )2,0− .
Il grafico di quali, fra le seguenti equazioni, è una retta?
110) 2 0xy− = ; 2 1 0x− = ; 3 5 0x y− + = .
111) 2 6 0y − = ; 2 0x y+ = ; 2 2 0x x y− + = .
112) 2 3 5x y xy− + = ; 4 3 0y x− = ; 35 1x y+ = .
113) 4 3 0x− = ; 2 22 0x y− + = ; 37
xy −= .
Le rette passanti per le seguenti coppie di punti sono parallele all’asse delle ascisse?
114) F( )2,1− S( )1,1 SI NO
115) K ( )3, 22
− − D( )3,22
− SI NO
116) A ( )0, 3− R( )3, 3− − SI NO
117) C( )12,3
− H( )12,3
SI NO
118) M ( )1,3− B( )2,5 SI NO
119) E( )4,0 K( )1,03
− SI NO
Le rette passanti per le seguenti coppie di punti sono parallele all’asse delle ordinate?
120) H ( )3,3 B( )3, 3− SI NO

212
121) C( )2,3 S( )3,2 SI NO
122) R( )1 ,22
− A( )1 ,12
− SI NO
123) D ( )3, 2− − P( )3, 2− SI NO
124) L ( )1, 1− Q( )1, 3− SI NO
125) T ( )20,3
− J( )30,2
− SI NO
Rappresenta, in un piano cartesiano, le rette aventi le seguenti equazioni:
126) 1y = − ; 25
x = ; 4 0x− = .
127) 6x = − ; 5 0y + = ; 2 3 0x− = .
128) 3 4 0y − = ; 52
x = − ; 5 10 0y − = .
129) Scrivi l’equazione delle rette rappresentate nelle seguenti figure:
fig. 13 fig. 14
fig. 15 fig. 16

213
Scrivi l’equazione della retta passante per le seguenti coppie di punti:
130) N ( )3,24
− D( )6 1,8 2
− ; Q( )3, 2− H( )1 , 22
− .
131) A ( )1,0− S( )1,3− ; K( )0, 6− L( )0,5 .
132) M ( )1 3,3 2
− C( )31,2
; L( )42,3
− S( )42,3
.
133) E( )5,0 R( )1,0− ; G( )3, 3− T( )3,3 .
Esempio
Rappresentiamo, in un piano cartesiano, le rette aventi le seguenti equazioni:
a) 32
y x= ; b) 3 0x y+ =
a) Per rappresentare una retta in un piano è sufficiente individuare due punti che le appartengono.
L’equazione della retta è espressa in forma esplicita ed è del tipo y mx= ; quindi il suo grafico è
una retta passante per l’origine degli assi cartesiani.
Per individuarne un altro, assegniamo, in modo arbitrario, un valore alla variabile x e
determiniamo il corrispondente valore della variabile y: 32 2 32
x y= ⇒ = ⋅ = .
Il punto A di coordinate ( )2,3 è il secondo punto della retta.
Rappresentiamo, nel piano cartesiano, il punto A e tracciamo la retta che passa per l’origine degli
assi e per il punto A; si ottiene la seguente figura:
La retta rappresentata nella figura è il grafico della funzione 32
y x= .

214
b) L’equazione della retta è espressa in forma implicita e, mancando il termine di grado 0, il suo
grafico è una retta passante per l’origine degli assi.
Per determinare un altro punto della retta, è opportuno scrivere l’equazione in forma
esplicita: 3y x= − .
Adesso, procediamo come nel caso a): assegniamo, in modo arbitrario, un valore alla variabile x
e determiniamo il corrispondente valore della variabile y: 1 3 1 3x y= ⇒ = − ⋅ = − .
Il punto C di coordinate ( )1, 3− è il secondo punto della retta.
La rappresentazione grafica dell’equazione 3 0x y+ = si ottiene tracciando la retta che passa per
l’origine degli assi cartesiani e per il punto C, come nella seguente figura:
Rappresenta, in un piano cartesiano, le rette aventi le seguenti equazioni:
134) 3y x= ; 0x y− = .
135) 4y x= − ; 2 0x y− − = .
136) 3 3 0x y+ = ; 34
y x= − .
137) 4 9 0x y− = ; 5y x= − .
138) 43
y x= − ; 2 8 0x y+ = .
139) 12
y x= ; 5 3 0x y− = .
140) 2 0x y− = ; 45
y x= .
141) 1 02
x y− = ; 6 5 0x y− = .

215
Esempio
Determiniamo l’equazione della retta rappresentata nella seguente figura:
Dalla figura deduciamo che:
a) la retta non è parallela agli assi cartesiani;
b) la retta passa per l’origine degli assi;
c) S ha coordinate ( )5,3 .
L’equazione della retta, pertanto, è del tipo y mx= .
Calcoliamo il valore di m (coefficiente angolare): y
mx
∆= ∆ ⇒ S O
S O
y ym
x x−= − ⇒ 3 0 3
5 0 5m −= =− .
Sostituiamo il valore così ottenuto nell’equazione y mx= ; si ottiene: 35
y x==== .
Questa è l’equazione della retta rappresentata della figura precedente.
142) Determina l’equazione della retta rappresentata in ciascuna delle seguenti figure:
fig. 17 fig.18

216
fig. 19 fig. 20
fig. 21 fig. 22
143) La retta b passa per l’origine degli assi ed ha coefficiente angolare −2; qual è la sua equazione?
144) La retta t ha coefficiente angolare 12
− e passa per l’origine degli assi; qual è la sua equazione?
145) Determina l’equazione della retta passante per l’origine degli assi e per Q( )2,6 .
146) Scrivi l’equazione della retta passante per l’origine degli assi e per M( )5,0− .
147) Una retta passa per l’origine degli assi e per A( )1, 23
− ; qual è la sua equazione?
148) Una retta passa per F( )0,4 e per l’origine degli assi; scrivi la sua equazione.
149) La retta a passa per S( )3 1,2 2
− e per l’origine degli assi; scrivi l’equazione di a.
150) Determina l’equazione della retta passante per l’origine degli assi e per D( )2,3− .

217
151) La retta s passa per l’origine degli assi ed ha lo stesso coefficiente angolare della retta passante per
L ( )1,2− e H( )3,4 ; qual è la sua equazione?
152) La retta d, passante per l’origine degli assi, ha coefficiente angolare uguale a quello della retta
passante per G( )2,35
e P( )10,2
− ; qual è l’equazione della retta d?
153) La retta b passa per l’origine degli assi ed ha lo stesso coefficiente angolare della retta passante
per C( )7,2 e T( )3,2− . Qual è la sua equazione?
154) Il coefficiente angolare della retta v, passante per l’origine degli assi, è il triplo di quello della retta
di equazione 2 4 0x y− = . Qual è l’equazione della retta v?
155) La retta k passa per l’origine degli assi e il suo coefficiente angolare è la metà di quello della retta
passante per D( )1,0− e T( )5,0 . Qual è l’equazione della retta k?
Rappresenta, in un piano cartesiano, le seguenti equazioni:
156) 4 2y x= − + ; 5 1 0x y− − = ; 56
y x= − + .
157) 6 3 2 0x y− + = ; 4 2 0x y− + = ; 8 4 3 0x y− + = .
158) 5 22
y x= − − ; 833
y x= − + ; 2 3 0y x− + = .
Esempi
Scriviamo l’equazione delle rette rappresentate nelle figg. 23 e 24:
fig.23 fig. 24
� Dall’analisi della fig. 23 deduciamo che:
• la retta non è parallela agli assi coordinati;
• passa per i punti A( )0,3 e Q( )3, 1− − ;
• A è il punto intersezione con l’asse delle ordinate.

218
L’equazione della retta, dunque, è del tipo y mx q= + ed il valore di q è 3; il valore di m
(coefficiente angolare) è dato dal rapporto yx
∆∆ .
Calcoliamo il valore di m: ( )3 1 3 1 4
0 3 3 3y
mx
− −∆ += = = = −∆ − −
Sostituendo i valori così determinati per m e q nell’equazione y mx q= + , si ottiene l’equazione
della retta: 4 33
y x = − +
� Dall’analisi della fig. 24 deduciamo che:
• la retta non è parallela agli assi coordinati;
• passa per i punti L( )3,5− e K( )3, 1− .
L’equazione della retta, quindi, è del tipo y mx q= + .
Calcoliamo il valore di m: ( )5 1 5 1 6 1
3 3 6 6y
mx
− −∆ += = = = − = −∆ − − − .
Sostituendo il valore di m così determinato nell’equazione y mx q= + , si ottiene:
y x q= − + (�)
Per determinare il valore di q posssiamo procedere in due modi.
I modo
Ricordiamo che:
� una retta r non passante per l’origine degli assi si ottiene per traslazione da una retta s
passante per l’origine degli assi e le rette r ed s sono fra loro parallele.
Osserva la seguente figura:
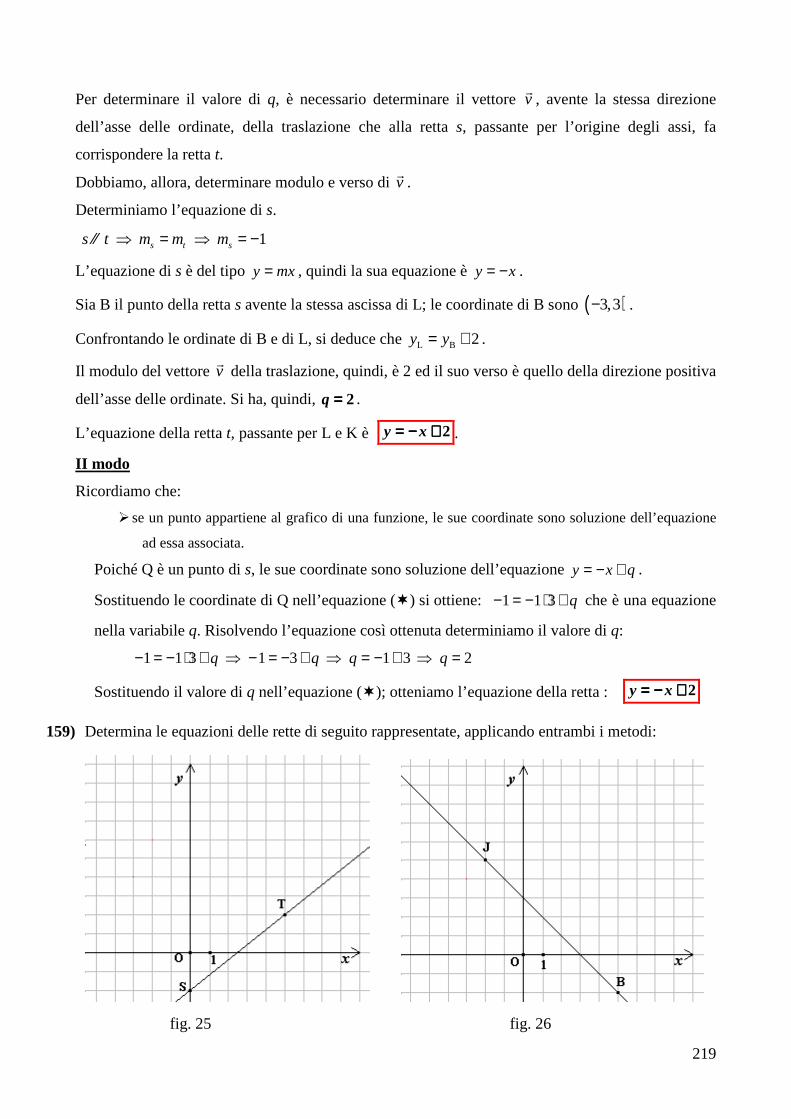
219
Per determinare il valore di q, è necessario determinare il vettore v
�
, avente la stessa direzione
dell’asse delle ordinate, della traslazione che alla retta s, passante per l’origine degli assi, fa
corrispondere la retta t.
Dobbiamo, allora, determinare modulo e verso di v�
.
Determiniamo l’equazione di s.
1s t ss t m m m ⁄⁄ ⇒ = ⇒ = −
L’equazione di s è del tipo y mx= , quindi la sua equazione è y x= − .
Sia B il punto della retta s avente la stessa ascissa di L; le coordinate di B sono ( )3,3− .
Confrontando le ordinate di B e di L, si deduce che L B 2y y= + .
Il modulo del vettore v�
della traslazione, quindi, è 2 ed il suo verso è quello della direzione positiva
dell’asse delle ordinate. Si ha, quindi, 2q ==== .
L’equazione della retta t, passante per L e K è 2y x= − += − += − += − + .
II modo
Ricordiamo che:
� se un punto appartiene al grafico di una funzione, le sue coordinate sono soluzione dell’equazione
ad essa associata.
Poiché Q è un punto di s, le sue coordinate sono soluzione dell’equazione y x q= − + .
Sostituendo le coordinate di Q nell’equazione (�) si ottiene: 1 1 3 q− = − ⋅ + che è una equazione
nella variabile q. Risolvendo l’equazione così ottenuta determiniamo il valore di q:
1 1 3 1 3 1 3 2q q q q− = − ⋅ + ⇒ − = − + ⇒ = − + ⇒ =
Sostituendo il valore di q nell’equazione (�); otteniamo l’equazione della retta : 2y x= − += − += − += − +
159) Determina le equazioni delle rette di seguito rappresentate, applicando entrambi i metodi:
fig. 25 fig. 26

220
fig. 27 fig. 28
fig. 29 fig.30
fig. 31 fig. 32

221
Il grafico di ciascuna delle seguenti equazioni è una retta; dopo averla rappresentata in un piano
cartesiano, determina:
a) il suo coefficiente angolare;
b) le coordinate del punto intersezione della retta con l’asse delle ordinate;
c) l’intervallo a cui appartiene l’angolo α che la retta forma con la direzione positiva dell’asse
delle ascisse e, se possibile, l’ampiezza dell’angolo α.
160) 2 3y x= − ; 3 6y x= − − ; 2 8 0x y− = .
161) 2 4 5 0x y− + = ; 2 0x y− + = ; 7 14 3 0x y− + = .
162) 8 4 5 0x y+ − = ; 4 1 0x y+ − = ; 9 12 11 0x y− + = .
163) 4 4 9 0x y+ − = ; 10 25 20 0x y− + = ; 6 15
y x= − .
164) 2 17
xy −= ; 6 415xy −= ; 4 2
3y x= − + .
165) 6 32
xy += ; 6 0x y− = ; 455
y x= − + .
166) 3 7 0x y+ = ; 14 19 3
y x= − ; 12 4 5 0x y− + = .
167) La prima colonna della seguente tabella contiene alcune coppie di punti; completala inserendo
nella seconda colonna il coefficiente angolare della retta passante per i due punti, nella terza
colonna indicando l’intervallo di appartenenza dell’angolo α, essendo α l’angolo che la retta
forma con la direzione positiva dell’asse delle ascisse:
Coppia di punti
Coefficiente angolare y
mx
∆ = ∆ α
A ( )2,4− B( )3,0 4 0 42 3 5
m −= = −− − 135° < α <180°
D ( )3,6− O( )0,0
O( )0,0 G( )1, 2−
M ( )2,3− T( )5, 4−
S( )1, 2− C( )3, 5−
L ( )2 1,3 2
− − P( )5 3,3 2
E( )1 3,4 2
− T( )5 5,2 4
−
F( )5,0− I( )0, 8−

222
168) Dati i punti:
R( )2,2− , A( )1 1,2 2
, F( )204,5
− − , K( )2 3,3 2
− − , C( )2,3− ;
S( )1 1,2 2
− − , D( )2 4,5 10
− , H( )7 21,4 8
− ; T( )5 5,2 2
; L( )4, 4−
completa la seguente tabella inserendo nella prima colonna i punti appartenenti alla bisettrice del I
e III quadrante, nella seconda colonna i punti appartenenti alla bisettrice del II e IV quadrante,
nella terza colonna i punti che non appartengono ad alcuna bisettrice.
Bisettrice I e III quadrante
Bisettrice II e IV quadrante
Non appartenenti ad alcuna bisettrice
Esempio
Determiniamo l’equazione delle rette passanti per:
a) H ( )2,5− P( )2, 4− −
b) D( )2, 1− S( )2, 1− −
c) R( )3,5− G( )1, 3−
a) Osserviamo le coordinate dei punti H e P: H P 2x x= = − .
La retta passante per H e P è parallela all’asse delle ordinate; la sua equazione è 2x = −= −= −= − .
b) Osserviamo le coordinate dei punti D e S: D S 1y y= = − .
La retta passante per D e S è parallela all’asse delle ascisse; la sua equazione è 1y = −= −= −= − .
c) Osserviamo le coordinate di R e G: R Gx x≠ ; R Gy y≠ .
La retta passante per R e G non è parallela ad alcuno degli assi cartesiani; la sua equazione è del
tipo y mx q= + . Per determinare m e q si procede come nell’esempio di pag. 104.
Scrivi le equazioni delle rette passanti per le seguenti coppie di punti:
169) D ( )1,2− S( )3, 1− [ ]3 4 5 0x y+ − =
170) K ( )1,2 M( )5,3 [ ]4 7 0x y− + =
171) E( )1, 4− − H( )2,1 [ ]5 3 7 0x y− − =

223
172) Z ( )3 4,2 3
− T( )3 19,2 12
− [ ]2 3 0x+ =
173) R( )9,3 A( )5,3− [ ]3 0y− =
174) P( )5,5 V( )1,6− [ ]6 35 0x y+ − =
175) B ( )1 1,2 2
− − R( )3 1,4 2
− [ ]8 2 5 0x y+ + =
176) L ( )4,6 T( )8,4 [ ]2 16 0x y+ − =
177) I ( )4,8− K( )4, 7− − [ ]4 0x+ =
178) F( )75,3
− Q( )18,3
− [ ]2 3 17 0x y− − =
179) N ( )5,1 C( )3, 1− [ ]4 0x y− − =
180) G( )84,3
H( )8 8,3 3
− [ ]3 8 0y− =
181) A ( )30,5
− K( )2,0 [ ]3 10 6 0x y− − =
Stabilisci quali, fra le rette di ciascun gruppo, sono tra loro parallele:
182) 3y x= − + ; 3 3 4 0x y+ − = ; 2 2 5 0x y− + = ; 2 2y x= − .
183) 2 3 0x y− + = ; 2 5y x= − ; 6 3 1 0x y− − = ; 2 9y x= − .
184) 13 19
y x= + ; 3 8 0y − = ; 6 0y + = ; 6 0x+ = .
185) 5 3 15 0x y+ + = ; 6 310xy += − ; 6 10 5 0x y+ − = ; 3 4
5y x= − .
186) 2 4 1 0x y− − = ; 4 12 5 0x y− + = ; 2 5 0x y− + = ; 12 24 6 0x y− − = .
187) 7 32
y x= − ; 2 7 3 0x y+ − = ; 16 35 10 0x y− + = ; 4 14 21 0y x− + = .
Stabilisci quali, fra le rette di ciascun gruppo, sono tra loro perpendicolari:
188) 2 5y x= − + ; 2 3 0x y− − = ; 2 2 0x y+ + = ; 2 12
xy −= .
189) 3 2 0x y− = ; 6 4 0x y− + = ; 4 16
y x= − ; 2 3 6 0x y+ − = .
190) 10 4 7 0x y− + = ; 5 2 8 0x y+ + = ; 5 2 0y − = ; 2 55
xy += − .
191) 2 9 0x− = ; 9 2 0x+ = ; 9 2 0y + = ; 4 18 9 0x y− + = .
192) 5 7y x= − ; 2 14 5 0x y− + = ; 21 3 4 0x y+ − = ; 5 35 14 0x y+ − = .

224
Esempi
Determiniamo l’equazione della retta s in modo che:
a) passi per A( )25,3
− e sia parallela all’asse delle ordinate;
b) passi per T( )7 ,22
− e sia parallela all’asse delle ascisse;
c) passi per Q( )3, 4− − e sia perpendicolare all’asse delle ordinate;
d) passi per D( )8,15
− e sia perpendicolare all’asse delle ascisse;
e) passi per F( )5,7 e sia parallela alla retta a: 3 0x y− = ;
f) passi per M( )5,3− e sia perpendicolare alla retta b passante per H( )2, 5− e I( )0, 2− .
a) I punti che appartengono ad una retta parallela all’asse delle ordinate hanno la stessa ascissa.
Poiché A 5x = − , l’equazione della retta s è 5x = −= −= −= − .
b) I punti che appartengono ad una retta parallela all’asse delle ascisse hanno la stessa ordinata.
Poiché T 2y = , l’equazione della retta s è 2y ==== .
c) Una retta perpendicolare all’asse delle ordinate è parallela all’asse delle ascisse.
Dobbiamo, allora, determinare l’equazione della retta s che passa per Q ed è parallela all’asse
delle ascisse. Per quanto detto al punto a), l’equazione della retta s è y 4= −= −= −= − .
d) Una retta perpendicolare all’asse delle ascisse è parallela all’asse delle ordinate.
Dobbiamo, allora, determinare l’equazione della retta s che passa per D ed è parallela all’asse
delle ordinate. Per quanto detto al punto b), l’equazione della retta s è 85
x = −= −= −= − .
e) La retta a, e quindi anche la retta s, non è parallela ad alcuno degli assi cartesiani. L’equazione di
s è, allora, del tipo y mx q= + .
Indicati con am e sm i coefficienti angolari, rispettivamente delle rette a e s, si ha:
a ⁄⁄⁄⁄⁄⁄⁄⁄ s ⇒⇒⇒⇒ a sm m==== .
Il coefficiente angolare di a è 13am = e, quindi, 1
3sm ==== ; l’equazione di s diventa 13
y x q= + .
Per determinare il valore di q, si sostituiscono ad x e ad y, rispettivamente, l’ascissa e l’ordinata
di F; si ottiene: 1 5 5 167 5 7 73 3 3 3
q q q= ⋅ + ⇒ = + ⇒ = − = .
L’equazione della retta s è 1 163 3
y x= += += += + .

225
f) Osservando le coordinate di H e I possiamo dire che la retta b non è parallela ad alcuno degli assi
cartesiani; anche la retta S, allora, non è parallela ad alcuno degli assi cartesiani. La sua
equazione, dunque, è del tipo y mx q= + .
Indicati con bm e sm i coefficienti angolari, rispettivamente delle rette b e s, si ha:
b ⊥⊥⊥⊥ s ⇒⇒⇒⇒ 1⋅ ⇒ −1s b sb
m m mm
= − == − == − == − = .
Determiniamo bm e sm : ( )5 2 5 2 3
2 0 2 2b
ym
x− − −∆ − += = = = −∆ − ; 2
3sm ====
Sostiuendo il valore di sm così ottenuto nell’equazione y mx q= + , si ottiene: 23
y x q= + .
Per determinare q, procediamo come nell caso e); si ha:
( )2 10 103 5 3 33 3 3
q q q= ⋅ − + ⇒ = − + ⇒ = + ⇒ 193
q ==== .
Pertanto, l’equazione della retta b è 2 193 3
y x= += += += + .
Determina l’equazione della retta t in modo che:
193) passi per C( )1,1− e sia parallela all’asse delle ordinate; [ ]1 0x+ =
194) passi per N( )2, 3− e sia parallela all’asse delle ascisse; [ ]3 0y+ =
195) passi per B( )1,2 e sia parallela alla retta : 4 1a y x = − − ; [ ]4 6 0x y+ − =
196) passi per G( )4,9 e sia perpendicolare all’asse delle ascisse; [ ]4 0x− =
197) passi per E( )50,4
− e sia parallela alla retta : 1 0m x y − + = ; [ ]4 4 5 0x y− − =
198) passi per T( )4, 6− − e sia perpendicolare alla retta : 3 6 1 0d x y + − = ; [ ]2 2 0x y− + =
199) passi per K( )5, 7− e sia perpendicolare all’asse delle ordinate; [ ]7 0y+ =
200) passi per L( )1,3 e sia parallela alla retta s passante per P( )1, 4− − e J( )0, 3− ; [ ]2y x= +
201) passi per B( )3, 4− e sia perpendicolare alla retta : 3 5 0h x y − + = ; [ ]3 5y x= − +
202) passi per H( )1,2− e sia parallela alla retta : 2 3g y x = − + ; [ ]2 0x y+ =
203) passi per I( )7,2− e sia perpendicolare alla retta r passante per E( )50,2
− e K( )1 1,2 2
− − ;
[ ]4 15 0x y− + =
204) passi per A( )2,3− e sia parallela alla retta d passante per N( )3,7− e T( )3,12− ; [ ]2 0x+ =
205) passi per F( )0, 5− e sia perpendicolare alla retta n passante per G( )3, 6− e L( )3,8 . [ ]5y = −

226
Risolvi graficamente le seguenti equazioni:
206) 2 2x x= − { }S 2 = −
207) 6 7 3 7x x− = − { }S 0 =
208) 7 11 24 5
x x− −= { }S 3 =
209) 7 14 0x− = { }S 2 =
210) 3 2 2 4x x− = − + [ ]S= ∅
211) 1 1 2x x− = − { }S 0 =
212) 4 16 0x+ = { }S 4 = −
213) ( )2 6x x− + = + { }S 4 = −
Esercizi di riepilogo
214) Sia 1:2
r y x = − ; determina l’equazione della retta b immagine di r nella traslazione di vettore v�
,
dove v�
è un vettore avente la stessa direzione dell’asse dell’ordinate, verso uguale a quello
positivo dell’asse delle ordinate e modulo 3.
215) Siano : 2 4 0h x y − = e v�
un vettore avente la stessa direzione dell’asse delle ordinate, verso
opposto a quello psitivo dell’asse delle ordinate e modulo 5. Qual è l’equazione della retta
corrispondente di h nella traslazione di vettore v�
?
216) Sia s la retta passante per A( )1, 3− e B( )2,2− . Determina modulo e verso del vettore v�
della
traslazione che alla retta m passante per l’origine degli assi fa corrispondere la retta s. 43
v =
�
217) Determina modulo e verso del vettore v�
, avente la stessa direzione dell’asse delle ordinate, della
traslazione che alla retta : 3a y x = − fa corrispondere la retta t passante per M( )1 , 22
− . 12
v =
�
218) Il punto H( )2, 1− appartiene alla retta g, immagine della retta :5 2 0d y x − = nella traslazione di
vettore v�
, avente direzione uguale a quella dell’asse delle ordinate. Qual è il modulo ed il verso
del vettore v�
? 95
v =
�
219) Un vettore v�
ha la stessa direzione dell’asse delle ordinate; quali sono modulo e verso di v�
se il
punto D( )3, 1− − appartiene alla retta s immagine di : 4 3 0k x y − = nella traslazione di vettore v�
?
3v = �

227
220) Siano r e t due rette di equazioni, rispettivamente, 4 1y x= − + e (2 3) 5 0h x y− + = . Per quale
valore di h r è parallela a t?
221) Siano : 4 2 3 0a x y − + = e : 2 ( 3) 5 0b x m y + − − = due rette di un piano cartesiano. Per quale
valore di m le rette a e b sono, fra loro, perpendicolari?
222) Per quale valore di k il punto intersezione delle rette : 2 5s y x k = − e : 3 2g y x = − + è un punto
dell’asse delle ordinate?
223) Per quale valore di a il punto F( )3,6− è un punto della retta ( ): 2 8 0p a x y − + − = .
Verifica che i triangoli, aventi per vertici le seguenti terne di punti, sono rettangoli:
224) O( )0,0 , K( )2,4 , R( )10,0
225) A ( )2,1− , G( )0,5 , L( )8,1
226) F( )4,2− , J( )4,6− , Q( )6,2−
227) Verifica che il quadrilatero di vertici D( )4,1 , F( )3, 4− , H( )2, 1− e L( )3,4 è un parallelogramma.
228) Dopo aver verificato che il quadrilatero di vertici A ( )1,5 , H( )4, 7− − , M ( )2,1 e T( )7,13 è un
parallelogramma, detemina la misura del suo perimetro e l’equazione di ciascuno dei suoi lati.
46; AH :12 5 13 0; HM :
3 11 0
x y x y
x y x y
− + = 4 − 3 − 5 = 0; ΜΤ : 12 − 5 −19 = 0; ΑΤ : 4 − + =
229) Siano A( )2,4 e B( )1, 2− − due vertici consecutivi del rettangolo ABCD. Detemina le coordinate
dei vertici C e D sapendo che D è un punto dell’asse delle ascisse. ( ) ( )C 7, 6 ; D 10,0 −
230) Siano H( )1,3− , N( )1,6− e P( )3,3 i vertici di un triangolo. Determina:
a) l’equazione dei suoi lati; [ ]HN : 1; HP : 3; NP :3 4 21 0x y x y = − = + − =
b) la misura dell’area; [6]
c) la misura del perimetro. [12]
231) Siano C( )1, 2− − , Q( )3,1 e S( )7, 2− i vertici di un triangolo. Dopo aver verificato che il triangolo è
isoscele, determina:
a) la misura dell’area: [12]
b) la misura del perimetro; [18]
c) l’equazione dei suoi lati. [ ]CQ: 4 5 0; CS: 2; QS:3 4 13 0x y y x y 3 − − = = − + − =

228
TEST DI AUTOVALUTAZIONE
1) Quale tra le rette seguenti è parallela alla retta di equazione 5x − 2y + 1 = 0 ?
a) 5 12
y x= − ;
b) 10 3 1 0x y− + = ;
c) 4 1 0x y− + = ;
d) 2 5 1 0x y− + = .
2) I punti A(4, 2), B(−4, 2), C(0, 7) sono:
a) equidistanti dall’origine;
b) vertici di un triangolo rettangolo;
c) vertici di un triangolo isoscele;
d) allineati.
3) Quali fra le seguenti coppie di equazioni rappresenta una coppia di rette perpendicolari?
a) x + y − 2 = 0 e 2x + 2y − 1 = 0 ;
b) 2x − 3y + 1 = 0 e 6x + 4y − 2 = 0 ;
c) 3x + y − 1 = 0 e 2x + 3y − 2 = 0 ;
d) 2x + y − 1 = 0 e 2x − y + 1 = 0.
4) Le rette di equazione 2x + 3y − 1 = 0 e 3x − 2y + 2 = 0 hanno in comune il punto di
coordinate
a) A (2, −1);
b) B (−1, −2);
c) C ( )4 7,13 13
− ;
d) D ( )7 4,13 13
− .
5) La distanza tra il punto ( )1A 0,5
− ed il punto ( )3B 2,5
è:
a) 5 142
;
b) 25
;
c) 2 295
;
d) 5 292
.

229
6) Il punto M (3, 2) è il punto medio del segmento AB. Sapendo che le coordinate di A sono
(1, −2) quali sono le coordinate di B?
a) B (2, 0);
b) B (5, 6);
c) B (6, 5);
d) B (0, 2);
7) La retta passante per i punti A (1, 2) e B (−1,4) ha equazione:
a) x + 2y – 5 = 0 ;
b) x + y – 3 = 0 ;
c) x – y + 3 = 0 ;
d) –x + y – 3 = 0.
8) La retta per P(3,2) parallela alla retta di equazione 2x + 3y + 1 = 0 ha equazione:
a) 2x + 3y – 12 = 0
b) 2x − 3y + 21 = 0
c) 2x – y + 12 = 0
d) 2x − 3y + 12 = 0
9) La retta per P(−2, 5) perpendicolare alla retta x − 2y – 1 = 0 ha equazione:
a) x + y + 1 = 0
b) 2x + y + 1 = 0
c) 2x + y – 1 = 0
d) x + 2y – 1 = 0
Soluzioni
1 2 3 4 5 6 7 8 9
a c b c c b b a c
Punteggio : viene assegnato un punto per ciascuna risposta esatta
Valutazione del test
da 0 a 3 punti: hai una scarsa conoscenza degli argomenti trattati; devi ripassare con attenzione
tutto il capitolo.
4 a 5 punti: hai una conoscenza approssimativa e non sufficiente degli argomenti trattati, devi
approfondire.
da 6 a 7 punti: hai conoscenza sufficienti o discrete ma puoi ancora miglorare.
da 8 a 10 punti: complimenti, hai ottime conoscenze dei contenuti trattati.

230
CAPITOLO 12
I SISTEMI LINEARI
12.1 I sistemi
Luca ha appena conosciuto Giorgio, il fratellino di Marta. Un po’ incuriosito, Luca chiede
a Marta:
� “Marta, simpatico Giorgio; ma quanti anni ha?”
Marta, enigmatica, risponde:
“La differenza fra la mia età e quella di Giorgio è di 7 anni; quattro anni fa io avevo il
doppio dei suoi anni.”
Luca: “Uffa! Se mi ricordassi la tua età …….. .”
� Marta e Lucia, all’Emporio della musica, hanno acquistato alcuni DVD, tutti dello stesso prezzo, e
alcuni CD, anche questi dello stesso prezzo. All’uscita incontrano Luca.
Luca: “Ciao, Marta. È vero che i prezzi di DVD e CD sono scontati? Quanto li hai pagati?”
Marta: “Non te lo dico. Devi sapere, però, che io ho speso 120 € per acquistare tre DVD e
quattro CD, invece Lucia ha speso 110 € per acquistare quattro DVD e due CD.”
Luca: ”E dai Marta! Sei sempre la solita!”
Per aiutare Luca a trovare le risposte alle sue domande, formalizziamo le risposte di Marta con i
simboli della Matematica.
I risposta
“La differenza fra la mia età e quella di Giorgio è di 7 anni; quattro anni fa
io avevo il doppio dei suoi anni.”
Dal momento che non conosciamo né l’età di Marta, né quella di Giorgio, indichiamo con:
■ x l’età di Marta; ■ y l’età di Giorgio (con x > y)
È ovvio che ( ) 2,x y ∈ N
• “La differenza fra la mia età e quella di Giorgio è di 7 anni ” diventa x – y = 7;
• “quattro anni fa io avevo il doppio dei suoi anni” diventa ( )4 2 4x y− = − .
Nella risposta di Marta, le due proposizioni sono legate dalla congiunzione “e” che, nel linguaggio
della logica, si traduce con l’operazione di congiunzione logica.
La risposta di Marta, dunque, con i simboli della Matematica diventa:
( ) ( )7 4 2 4x y x y − = ∧ − = −

231
Ricordiamo che una proposizione, formata da due proposizioni legate fra loro dalla congiunzione
logica, è vera soltanto se entrambe le proposizioni che la compongono sono vere.
La risposta che cerca Luca, allora, è una coppia di numeri che rende vere entrambe le proposizioni.
Indicati con S1 e S2 gli insiemi soluzioni, rispettivamente, di 7x y− = e ( )4 2 4x y− = − , la
soluzione alla domanda di Luca è l’insieme S = S1 ∩ S2
II risposta
“Non te lo dico. Devi sapere, però, che io ho speso 120 € per acquistare tre
DVD e quattro CD, invece Lucia ha speso 110 € per acquistare quattro
DVD e due CD.”
Non conosciamo né il prezzo di un DVD, né il prezzo di un CD; quindi, sia:
■ x il prezzo di un DVD ; ■ y il prezzo di un CD.
Per questo problema ( ) 2,x y ∈Q
• “ io ho speso 120 € per acquistare tre DVD e quattro CD” diventa 3 4 120x y+ = ;
• “Lucia ha speso 110 € per acquistare quattro DVD e due CD” diventa 4 2 110x y+ = .
Nella risposta di Marta, le due proposizioni sono legate dalla congiunzione “invece” che, nel
linguaggio della logica, si traduce con l’operazione di congiunzione logica.
La risposta di Marta, dunque, con i simboli della Matematica, diventa:
( ) ( )3 4 120 4 2 110x y x y+ = ∧ + =
Ancora una volta, la risposta che cerca Luca è una coppia di numeri che rende vere entrambe le
proposizioni. Indicati con S1 e S2 gli insiemi soluzioni, rispettivamente, di 3 4 120x y+ = e
4 2 110x y+ = , la soluzione alla domanda di Luca è l’insieme S = S1 ∩ S2
Dal punto di vista formale, le due risposte di Marta si traducono con proposizioni aperte: due
equazioni legate fra loro dalla congiunzione logica.
Proposizioni come quelle precedenti, cioè proposizioni aperte legate fra loro dalla congiunzione
logica, in Matematica prendono il nome di sistemi e si è soliti scriverle sostituendo il simbolo di
congiunzione logica con una parentesi graffa come evidenziato di seguito:
( ) ( )7 4 2 4x y x y − = ∧ − = − ⇔ ( )7
4 2 4
x y
x y
− = − = −
;
( ) ( )3 4 120 4 2 110x y x y+ = ∧ + = ⇔ 3 4 120
4 2 110
x y
x y
+ = + =
.

232
Si parla di sistemi di equazioni, se le proposizioni aperte sono equazioni (come nei due casi
precedenti); sistemi di disequazioni se le proposizioni aperte sono disequazioni; ecc. …….. .
Possiamo, allora, dare le seguenti definizioni:
■ Si chiama sistema un insieme di proposizioni aperte che devono essere vere
contemporaneamente.
■ Una soluzione di un sistema è un insieme di elementi che rendono vere contemporaneamente
tutte le proposizioni del sistema.
■ Si chiama insieme soluzione di un sistema l’insieme formato da tutte le sue soluzioni.
■ Risolvere un sistema vuol dire determinare tutte le sue soluzioni.
■ Due sistemi si dicono equivalenti se l’insieme soluzione dell’uno è insieme soluzione
dell’altro e viceversa.
Con il linguaggio della Logica:
� Si chiama sistema una proposizione aperta formata da proposizioni aperte legate fra loro
dall’operazione di congiunzione logica.
� L’ insieme soluzione di un sistema è l’insieme intersezione degli insiemi di verità delle
proposizioni aperte che formano il sistema.
���� Risolvere un sistema vuol dire determinare tutti gli elementi del suo insieme di verità.
Per adesso, ci occuperemo soltanto di sistemi di equazioni.
I sistemi di equazioni possono essere classificati in base alle loro soluzioni.
Un sistema di equazioni si dice
� possibile se l’insieme soluzione ha almeno un elemento ed, in particolare:
� determinato se l’insieme soluzione ha un numero finito di elementi,
� indeterminato se l’insieme soluzione ha un numero infinito di elementi;
� impossibile se l’insieme soluzione è l’insieme vuoto.
Inoltre, un sistema di equazioni può essere classificato in base alla forma delle equazioni che lo
compongono.
� Un sistema di equazioni si dice fratto o frazionario se almeno una delle equazioni del sistema
è frazionaria .
� Un sistema di equazioni si dice letterale se almeno una delle equazioni del sistema è letterale.
� Un sistema di equazioni si dice letterale fratto se almeno una delle equazioni del sistema è
frazionaria e almeno una delle equazioni del sistema è letterale.

233
Ancora una definizione:
Si chiama grado di un sistema di equazioni il prodotto dei gradi delle equazioni che lo
compongono.
Ad esempio:
� il sistema 2 3 0
4 0
x y
x y
+ − = + − =
è un sistema di equazioni di primo grado perché entrambe le equazioni del
sistema sono di primo grado.
� Il sistema 5 0
2 1
xy
x y
+ = − =
è un sistema di secondo grado perché la prima equazione del sistema è di
secondo grado e la seconda equazione è di primo grado.
In questo capitolo impareremo a determinare l’ insieme soluzione di sistemi di equazioni di
primo grado, o ad esse riconducibili, contenenti due equazioni in due variabili o tre equazioni in tre
variabili.
I sistemi di equazioni di primo grado sono anche detti sistemi lineari; infatti, tutte le equazioni
del sistema sono di primo grado e, come sappiamo, la loro rappresentazione grafica è una retta.
I sistemi con i quali abbiamo formalizzato le risposte di Marta (pag. 1) sono sistemi di equazioni di
primo grado.
In generale, un sistema lineare di due equazioni in due variabili è del tipo:
' ' '
ax by c
a x b y c
+ = + =
oppure 0
' ' ' 0
ax by c
a x b y c
+ + = + + =
( con coefficienti non tutti nulli)
Se la forma di un sistema lineare è di questo tipo, il sistema si dice ridotto a forma normale.
Per ridurre un sistema di equazioni a forma normale è sufficiente applicare, a ciascuna equazione
del sistema, i principi di equivalenza delle equazioni.
PROVA TU
1) Determina il grado di ciascuno dei seguenti sistemi:
a) 22 3 0
1
x y
x y
+ − =
− = b)
2 2
2
5 3
1
x y x y
x y
+ − =
− = c)
4 5 0
3 0
5 3 4
y x
x z
x y z
− + = − − = − + =
2) Riduci a forma normale i seguenti sistemi lineari:
a) ( )
( )2 1 3 6
5 1 4 3
x y x
x y x
− + = −
− + = + b)
( ) ( )( )5 1 2 5 1 1
2 8
x x y x x
x y
− = − − +
+ =

234
12.2 Classificazione di un sistema lineare
Per il momento, ci limitiamo a considerare sistemi lineari contenenti due equazioni in due variabili.
Prima di determinare l’insieme soluzione di un sistema lineare è opportuno classificarlo in base alle
sue soluzioni, cioè stabilire se esso è determinato, indeterminato, impossibile.
La rappresentazione grafica di ciascuna equazione di un sistema lineare è una retta e, come ben
sappiamo dalla geometria euclidea, due rette nel piano possono essere:
� incidenti: hanno un solo punto in comune e, quindi, l’insieme intersezione ha un solo
elemento;
� parallele e distinte: non hanno alcun punto in comune e, quindi, l’insieme intersezione è
l’insieme vuoto;
� parallele e coincidenti: hanno tutti i punti in comune e, quindi, l’insieme intersezione
contiene un numero infinito di elementi.
Per classificare il sistema, allora, dobbiamo stabilire se le rette, le cui equazioni formano il sistema,
sono incidenti, parallele e distinte oppure parallele e coincidenti.
Ricordiamo che due rette sono parallele (distinte o coincidenti) se hanno coefficiente angolare
uguale.
Esempio 1
Classifichiamo il sistema 2 5
2 0
x y
x y
+ = − =
.
Siano : 2 5r x y + = e : 2 0s x y − = le rette del sistema; determiniamo i loro coefficienti angolari:
2 21r
amb
= − = − = − ; 1 12 2s
amb
= − = − =−
Poiché i due coefficienti angolari non sono uguali, le rette non sono parallele e, quindi, sono
incidenti. La loro intersezione, allora, ha un solo elemento ed il sistema, dunque, è determinato.
In simboli: { }Pr sm m r s ≠ ⇒ ∩ = ⇒ sistema determinato.
Esempio 2
Classifichiamo il sistema 3 2 1
6 4 5
x y
x y
− = − =
Siano : 3 2 1t x y − = e : 6 4 5v x y − = le rette del sistema; riscriviamo le equazioni di t e v in forma
implicita: : 3 2 1 0t x y − − = , : 6 4 5 0v x y − − = ; determiniamo i loro coefficienti angolari:
3 32 2t
amb
= − = − =− ; 3
2
66 34 24v
amb
= − = − = =−
I coefficienti angolari delle rette t e v sono uguali, quindi le rette sono parallele.

235
Adesso dobbiamo stabilire se esse sono distinte o coincidenti; determiniamo, allora, l’ordinata
all’origine di ciascuna delle due rette:
1 12 2t
cqb
−= − = − = −− ; 5 54 4v
cqb
−= − = − = −−
Le rette t e v hanno ordinata all’origine diversa; esse, allora, incontreranno l’asse delle ordinate in
due punti distinti. Le rette t e v sono parallele e distinte e, quindi, non hanno alcun punto in comune
e la loro intersezione è l’insieme vuoto; il sistema è impossibile.
In simboli: ( ) ( )t v t vm m q q = ∧ ≠ ⇒ sistema impossibile.
Esempio 3
Classifichiamo il sistema 3 1
3 9 3
x y
x y
+ = + =
Siano : 3 1p x y + = ed : 3 9 3h x y + = le rette del sistema; riscriviamo le equazioni di t e v in forma
implicita: : 3 1 0p x y + − = ed : 3 9 3 0h x y + − = ; determiniamo i loro coefficienti angolari:
13p
amb
= − = − ; 1
3
3 139h
amb
= − = − = −
I coefficienti angolari delle rette t e v sono uguali, quindi le rette sono parallele.
Adesso dobbiamo stabilire se esse sono distinte o coincidenti; determiniamo, allora, l’ordinata
all’origine di ciascuna delle due rette:
1 13 3p
cqb
−= − = − = ; 1
3
33 19 39v
cqb
−= − = − = =
Le rette t e v hanno uguale ordinata all’origine; esse, allora, incontrano l’asse delle ordinate nello
stesso punto.
Le rette t e v essendo parallele ed avendo un punto in comune (il punto intersezione con l’asse delle
ordinate), sono coincidenti e la loro intersezione contiene un numero infinito di elementi (tutti i
punti delle due rette). Il sistema, quindi, è indeterminato.
In simboli: ( ) ( )p h p hm m q q = ∧ = ⇒ sistema indeterminato.
Generalizzando, possiamo dire che per classificare un sistema lineare del tipo ' ' '
ax by c
a x b y c
+ = + =
(con tutti i coefficienti non nulli) è necessario confrontare fra loro i rapporti ab
− e
''
ab
− (coefficienti angolari delle due rette) e, nel caso in cui essi siano uguali, confrontare i rapporti
cb
− e ''
cb
− (ordinata all’origine di ciascuna delle due rette).

236
Tuttavia, è possibile procedere in un altro modo, forse più semplice.
Osserva le seguenti catene di implicazioni:
� ''
a ab b
− = − ⇒ ''
a ab b
= ⇒ (se ' 0a ≠ , divido ambo i membri dell’uguaglianza per 'a ) ⇒
⇒ 1' 'a
a b b= ⇒ (moltiplico ambo i membri dell’uguaglianza per b) ⇒
' 'a ba b
= .
� ''
c cb b
− = − ⇒ ''
c cb b
= ⇒ (se ' 0c ≠ , divido ambo i membri dell’uguaglianza per 'c ) ⇒
⇒ 1' 'c
c b b= ⇒ (moltiplico ambo i membri dell’uguaglianza per c) ⇒
' 'c bc b
=
In definitiva, ='' ' '
− = −− = −− = −− = − ⇒ ⇒ ⇒ ⇒ a a a bb b a b
; ='' ' '
− = −− = −− = −− = − ⇒ ⇒ ⇒ ⇒ c c c bb b c b
.
Possiamo, allora, dire che:
: 0r ax by c + + = ⁄⁄⁄⁄⁄⁄⁄⁄ : ' ' ' 0s a x b y c + + = ⇔ ' '
a ba b
=
: 0r ax by c + + = coincide con : ' ' ' 0s a x b y c + + = ⇔ ' ' '
a b ca b c
= =
Applichiamo le considerazioni appena fatte ai sistemi lineari del tipo ' ' '
ax by c
a x b y c
+ = + =
; si ottiene:
• ≠' '
a ba b
⇒ rette incidenti ⇒ sistema determinato;
• = ≠' ' '
a b ca b c
⇒ rette parallele distinte ⇒ sistema impossibile;
• = =' ' '
a b ca b c
⇒ rette coincidenti ⇒ sistema indeterminato.
Le considerazioni precedenti si applicano ad un sistema ridotto a forma normale; se il sistema non
lo è, prima si riduce a forma normale e, successivamente, si classifica.
Esempi
Classifichiamo i sistemi:
a) 4 5 1
5 3 2
x y
x y
− = + =
; b) 4 6 5
2 3 3
x y
x y
− = − =
c) 3 2
9 3 6
x y
x y
− = − =
a) Il sistema è ridotto a forma normale.
Osserviamo che:
4, 5 4 5 5;' 5 ' 3 3 ' '' 5, ' 3
a b a b a ba b a ba b
= = − − ⇒ = = = − ⇒ ≠ = =
⇒ sistema determinato.

237
b) Il sistema è ridotto a forma normale.
Osserviamo che:
4, 6 4 62; 2' 2 ' 3 ' '' 2, ' 3
a b a b a ba b a ba b
= = − − ⇒ = = = = ⇒ = −= = −
Inoltre, 55, ' 3' 3
cc cc
= = ⇒ = ; si ha:
' ' 'a b ca b c
= ≠ ⇒ sistema impossibile.
c) Il sistema è ridotto a forma normale.
Osserviamo che:
3, 1 3 1 1 1;' 9 3 ' 3 3 ' '' 9, ' 3
a b a b a ba b a ba b
= = − − ⇒ = = = = ⇒ = −= = −
Inoltre, 2 1, ' 6' 6 3
cc cc
= 2 = ⇒ = = ; si ha:
' ' 'a b ca b c
= = ⇒ sistema indeterminato.
Prova, adesso, a classificare i sistemi con i quali abbiamo formalizzato le risposte di Marta (pag. 1).
Entrambi i sistemi sono …………………………………………. .
PROVA TU
Classifica i seguenti sistemi:
1) 4 0
2 1
x y
x y
+ = + =
; 3
4 4 12
x y
x y
− = − =
2) 8 2 1 0
4 3 0
x y
x y
+ − = − − =
; 3( 1) 2 2
6 2(1 2 ) 4
x y
x y
− + = − − =
12.3 Risoluzione di un sistema lineare: metodo grafico
Nel paragrafo precedente abbiamo imparato a stabilire se un sistema lineare di due equazioni in due
variabili ha soluzioni e, eventualmente, quante sono le sue soluzioni; non siamo ancora in grado,
però, di determinarne le soluzioni.
È chiaro che “troviamo” le soluzioni di un sistema soltanto se esso è determinato.
Nel caso in cui esso sia indeterminato, l’insieme soluzione del sistema è formato da tutti i punti che
appartengono alle due rette coincidenti.
Consideriamo il sistema dell’Esempio 1 del paragrafo precedente:
2 5
2 0
x y
x y
+ = − =

238
Abbiamo già osservato che esso è determinato e, quindi, esiste una sola coppia di numeri reali che
rende vere entrambe le proposizioni del sistema.
Indichiamo con : 2 5r x y + = e : 2 0s x y − = le rette del sistema e sia P il loro punto intersezione.
Rappresentiamole in un piano cartesiano:
Poiché P appartiene alla retta r, le sue coordinate sono soluzione dell’equazione 2 5x y+ = ; poiché
P appartiene alla retta s, le sue coordinate sono soluzione dell’equazione 2 0x y− = .
Le coordinate di P, allora, rendono vere entrambe le equazioni del sistema e, dunque, ne sono la
soluzione. Dalla rappresentazione grafica deduciamo che le coordinate di P sono ( )2,1 .
L’insieme soluzione del sistema è S = ( ){ }2,1 .
Possiamo, allora, sintetizzare:
per risolvere un sistema del tipo ' ' '
+ =+ =+ =+ =+ =+ =+ =+ =
ax by c
a x b y c con il metodo grafico, si procede nel modo
seguente:
� si classifica il sistema;
� si rappresentano, in un piano cartesiano, le rette le cui equazioni formano il sistema;
� nel caso di un sistema determinato, si determinano le coordinate del loro punto
intersezione.
Tale coppia di numeri è la soluzione del sistema.
Esempio
Risolviamo il seguente sistema:
2 2
4 3 11
x y
x y
− = − + =
r
x y
0 5
1 3
s
x y
0 0
4 2

239
Prima di tutto, classifichiamo il sistema.
2, 1 2 1 1 1;' 4 2 ' 3 3 ' '' 4, ' 3
a b a b a ba b a ba b
= = − − ⇒ = = = = − ⇒ ≠ = =
⇒ sistema determinato.
Il sistema, dunque, ha una sola soluzione.
Determiniamo la soluzione del sistema.
Rappresentiamo, nel piano cartesiano, le rette : 2 2a x y − = − e : 4 3 11b x y + = e indichiamo con P
il loro punto intersezione.
La soluzione del sistema è data dalle coordinate del punto P.
Osservando il grafico, tuttavia, non è del tutto agevole determinare le coordinate di P perché la sua
ascissa non è espressa da un numero intero.
Risolvere, dunque, un sistema con il metodo grafico non sempre consente di determinare la
soluzione esatta di un sistema.
PROVA TU
Risolvi, con il metodo grafico, i seguenti sistemi:
2 4 0
1 0
x y
x y
+ − = − − =
; 2 8
3 9 0
x y
x y
− = − − + =
12.4 Metodo di sostituzione
Abbiamo detto, in precedenza, che il metodo grafico non sempre permette di determinare la
soluzione esatta di un sistema.
Vediamo, adesso, uno dei metodi algebrici che ci permettono di determinare la soluzione di un
sistema lineare: il metodo di sostituzione.
Illustriamo questo metodo con un esempio e consideriamo il sistema del paragrafo precedente:
2 2
4 3 11
x y
x y
− = − + =
Sappiamo già che questo sistema è determinato.
b
x y
0 113
3 13
−
a
x y
0 2
−1 0

240
Applicando il primo principio di equivalenza delle equazioni, dalla prima equazione del sistema
ricaviamo la variabile y in funzione della variabile x; si ottiene:
2 2 2 2
4 3 11 4 3 11
x y y x
x y x y
− = − = + ⇒ + = + =
Nella seconda equazione del sistema, sostituiamo alla variabile y l’espressione ottenuta per essa
nella prima equazione; si ottiene:
( )
2 2
4 3 114 3 11
2 22 2
x
x
y xy
xx y
= + = ⇒ + =+ = +
+
La seconda equazione del sistema, adesso, è un’equazione di primo grado contenente la sola
variabile x; possiamo, allora, risolvere questa equazione e determinare, così, il valore della variabile
x. Si ottiene:
2 22 2 2 25 14 6 6 11 10 5
10 2
y xy x y x
x x x x
= += + = + ⇒ ⇒ + + = = = =
Il valore ottenuto per la variabile x, lo sostituiamo nell’espressione ottenuta in precedenza per y. Si
ottiene:
12 2 1 2 32 22
1 12 22
11
2
y y yy
x xx
x
x
= + = + == ⋅ + ⇒ ⇒ ⇒ = = = =
La coppia ( )1 ,32
è la soluzione del sistema; quindi l’insieme soluzione del sistema è S = ( ){ }1 ,32
.
PROVA TU
1) Aiuta Luca a trovare la soluzione alle risposte di Marta (pag. 1).
2) Risolvi i seguenti sistemi con il metodo di sostituzione:
a) 1 0
3 2
x y
x y
+ − = − =
; b) 2 1
34 0
yx
x y
− = + =
12.5 Metodo di confronto
Illustriamo questo metodo ancora con un esempio.
Risolviamo il seguente sistema:
3 2 1
2
x y
x y
− = + =

241
Prima di tutto, classifichiamo il sistema.
3, 2 3 23; 2' 1 ' 1 ' '' 1, ' 1
a b a b a ba b a ba b
= = − − ⇒ = = = = − ⇒ ≠ = =
⇒ sistema determinato.
Il sistema, dunque, ha una sola soluzione.
Determiniamo la soluzione del sistema.
Applicando i principi di equivalenza delle equazioni, determiniamo da ciascuna di esse una
espressione per la stessa variabile.
Ricaviamo una espressione per la variabile y; si ha:
3 12
22
3 2 1 yx y
x yxy
x =− = ⇒ + =
−
= −
Poiché le espressioni 3 12
x− e 2 x− rappresentano la stessa variabile y, per la proprietà transitiva
dell’uguaglianza, esse sono uguali fra di loro.
Adesso, sempre applicando i principi di equivalenza delle equazioni, determiniamo da ciascuna di
esse una espressione per la variabile x; si ottiene:
1 23 2 1 3
22
xx y
x y
y
yx
=− = ⇒ + =
+
= −
Poiché le espressioni 1 2
3y+
e 2 y− rappresentano la stessa variabile x, per la proprietà transitiva
dell’uguaglianza, esse sono uguali fra di loro.
Una equazione del sistema si ottiene, allora, ponendo uguali le espressioni ottenute per la variabile
y; l’altra equazione del sistema si ottiene ponendo uguali le espressioni ottenute per la variabile x.
Il sistema diventa:
1 2
3 12
2
2
3y
x
y
x
+ −
=− − =
Ciascuna delle equazioni del sistema è una equazione di primo grado con una sola variabile;
risolviamo, allora, ciascuna di esse. Si ottiene:
3 1 2 3 1 4 2 5 5 121 2 1 2 6 3 5 5 12
3
x x x x x x
y y y y yy
− = − − = − = = ⇒ ⇒ ⇒ + + = − = = = −
La coppia ( )1,1 è la soluzione del sistema; quindi l’insieme soluzione del sistema è S = ( ){ }1,1 .

242
PROVA TU
Risolvi con il metodo del confronto, i seguenti sistemi:
a)
3 5 0
2 6
x y
x y
− = − =
; b) 2 8 5 0
4 1
x y
x y
− − = + =
OSSERVAZIONE
Talvolta, per risolvere un sistema si può procedere applicando un metodo che possiamo definire
“combinazione” del metodo di sostituzione e del metodo di confronto.
Osserva il seguente esempio.
Risolviamo il sistema 6
4 2 1
x y
x y
− = + =
.
Prima di tutto, classifichiamo il sistema.
1, 1 1 1 1;' 4 ' 2 2 ' '' 4, ' 2
a b a b a ba b a ba b
= = − − ⇒ = = = − ⇒ ≠ = =
⇒ sistema determinato.
Il sistema, dunque, ha una sola soluzione.
Determiniamo la soluzione del sistema.
Applicando i principi di equivalenza delle equazioni, determiniamo da ciascuna di esse una
espressione per la stessa variabile; ad esempio per la variabile y. Si ottiene:
661 44 2 1
2
y xx yxx y y
= −− = ⇒ −+ = =
Poiché le espressioni 6x− e 1 42
x− rappresentano la stessa variabile y, per la proprietà transitiva
dell’uguaglianza, esse sono uguali fra di loro.
Il sistema iniziale è equivalente al sistema formato dall’equazione che si ottiene ponendo uguali le
espressioni della variabile y e da una delle due equazioni che esprimono la variabile y, scelta a
piacere.
Data la loro forma, è conveniente scegliere come seconda equazione del sistema l’equazione
6y x= − . Si ottiene, quindi, il seguente sistema:
1 46
26
xx
y x
− − = = −
La prima equazione di questo sistema è una equazione con la sola variabile x; risolviamo tale
equazione ed il valore ottenuto per la variabile x lo sostituiamo nell’altra equazione del sistema
ottenendo, così, il valore per la variabile y. Si ha dunque:

243
13 13 131 4 2 12 1 4 6 136 6 6 626 6 13 13 36 236 6
6 6 6
x x xx x x xx
y x y xy x y y y
= = =− − = − =− = ⇒ ⇒ ⇒ ⇒ ⇒ = − = − − = − = − = = −
La coppia ( )13 23,6 6
− è la soluzione del sistema; l’insieme soluzione del sistema è S = ( ){ }13 23,6 6
− .
12.6 Metodo di riduzione
Questo metodo si basa sulla seguente proprietà delle uguaglianze numeriche:
( ), , , :a b c d a b c d a c b d∀ ∈ = ∧ = ⇒ + = +R
Ancora una volta, illustriamo questo metodo con alcuni esempi.
Esempio 1
Risolviamo il seguente sistema:
4 5 2
2 5 1
x y
x y
+ = − =
Prima di tutto, classifichiamo il sistema.
4, 5 4 52; 1' 2 ' 5 ' '' 2, ' 5
a b a b a ba b a ba b
= = ⇒ = = = = − ⇒ ≠ −= = −
⇒ sistema determinato.
Osserviamo che i coefficienti della variabile y, nelle due equazioni, sono opposti; applichiamo la
proprietà appena ricordata e sommiamo membro a membro le due equazioni. Otteniamo:
4 5 2
2 5 16 3
x y
x yx
+ = − = =
Adesso, applicando il secondo principio di equivalenza delle equazioni, facciamo in modo che i
coefficienti della variabile x diventino opposti; moltiplichiamo, allora, per −2 ambo i membri della
seconda equazione del sistema. Si ottiene:
4 5 2 4 5 2
2 5 1 4 10 2
x y x y
x y x y
+ = + = ⇒ − = − + = −
Applichiamo la proprietà ricordata in apertura di paragrafo e sommiamo membro a membro le due
equazioni. Otteniamo:
4 5 2
4 10 215 0
x y
x yy
+ = − + = − =
Abbiamo, così, ottenuto due equazioni con una sola variabile.
−2

244
Il sistema 6 3
15 0
x
y
= =
è equivalente al sistema iniziale.
Risolviamo quest’ultimo sistema:
16 32
15 0 0
x x
y y
= = ⇒ = =
La coppia ( )1 ,02
è la soluzione del sistema; l’insieme soluzione del sistema è S = ( ){ }1 ,02
.
Esempio 2
Risolviamo il seguente sistema:
3 4 2
2 3 4
x y
x y
− = − =
Prima di tutto, classifichiamo il sistema.
3, 4 3 4 4;' 2 ' 3 3 ' '' 2, ' 3
a b a b a ba b a ba b
= = − − ⇒ = = = ⇒ ≠ −= = − ⇒ sistema determinato.
Sommando membro a membro le due equazioni, ci proponiamo di ottenere una equazione nella sola
variabile y.
Dobbiamo fare in modo, allora, che i coefficienti della variabile x diventino opposti.
Osservando le due equazioni notiamo che i due coefficienti non sono uno multiplo dell’altro (come
nell’esempio 1) ma sono coprimi. Moltiplichiamo, allora, ambo i membri della prima equazione per
2 e ambo i membri della seconda per −3; si ottiene:
3 4 2 6 8 4
2 3 4 6 9 12
x y x y
x y x y
− = − = ⇒ − = − + = −
Adesso, sommiamo membro a membro le due equazioni; si ottiene:
6 9 128
x y
x yy
6 − 8 = 4− + = − = −
Adesso, dobbiamo fare in modo che siano opposti i coefficienti della variabile y.
Osservando le due equazioni del sistema iniziale, notiamo che anche i coefficienti della variabile y
non sono uno multiplo dell’altro, ma sono coprimi. Moltiplichiamo, allora, ambo i mmbri della
prima equazione per 3 e ambo i membri della seconda equazione per −4; si ottiene:
3 4 2 12
2 3 4 8 12 16
x y x y
x y x y
− = 9 − = 6 ⇒ − = − + = −
2
−3
3
−4

245
Adesso, sommiamo membro a membro le due equazioni; si ottiene:
9 12 6
8 12 1610
x y
x yx
− = − + = − = −
Il sistema 10
8
x
y
= − = −
è equivalente al sistema iniziale.
La coppia ( )10, 8− − è la soluzione del sistema; l’insieme soluzione del sistema è S = ( ){ }10, 8− − .
PROVA TU
Risolvi con il metodo di riduzione i seguenti sistemi:
a)
6 3
2 3 0
x y
x y
− = + =
; b) 4 8 3 0
3 1 0
x y
x y
− − = + + =
OSSERVAZIONE
Talvolta, per risolvere un sistema si può procedere applicando un metodo che possiamo definire
“combinazione” del metodo di sostituzione e del metodo di riduzione.
Risolviamo il seguente sistema:
2 6 3
6 1
x y
x y
− = + =
Prima di tutto, classifichiamo il sistema.
2, 6 2 62; 1' 1 ' 6 ' '' 1, ' 6
a b a b a ba b a ba b
= = − − ⇒ = = = = − ⇒ ≠ = =
⇒ sistema determinato.
Il sistema, dunque, ha una sola soluzione.
Poiché i coefficienti della variabile y, nelle due equazioni, sono opposti, sommando membro a
membro le due equazioni si ottiene una equazione nella sola variabile x. Si ha:
2 6 3
6 13 4
x y
x yx
− = + = =
Il sistema formato dall’equazione così ottenuta e da una delle due equazioni del sistema iniziale,
scelta a piacere, è equivalente al sistema iniziale.
Dobbiamo, allora, risolvere uno dei seguenti sistemi
3 4
6 1
x
x y
= + =
o 3 4
2 6 3
x
x y
= − =

246
Risolviamo il primo dei due sistemi applicando il metodo di sostituzione:
4 44 43 4 3 33 36 1 4 14 18 3 18 16 1
3 18
x xx x x
x y y yy y
= = = = = ⇒ ⇒ ⇒ ⇒ + = + = = −+ = = −
La coppia ( )4 1,3 18
− è la soluzione del sistema; l’insieme soluzione del sistema è S = ( ){ }4 1,3 18
− .
12.7 Metodo di Cramer
Prendiamo, nuovamente, in considerazione il sistema risolto nel paragrafo 12.5:
3 2 1
2
x y
x y
− = + =
È possibile associare al sistema una tabella nella quale sono riportati i coefficienti delle variabili;
nella prima colonna si riportano i coefficienti della variabile x e nella seconda colonna quelli della
variabile y:
3 2M
1 1
− =
In matematica, tabelle di numeri reali, come la tabella M, prendono il nome di matrici .
Abbiamo le seguenti definizioni:
� Una matrice di tipo m n×××× è una tabella di numeri reali formata da m righe e da n colonne.
� Se il numero di righe di una matrice è uguale al numero di colonne la matrice si dice
quadrata.
� In una matrice quadrata, il numero di righe (o colonne) è detto ordine della matrice.
Inoltre, ad ogni matrice quadrata, e solo alle matrici quadrate, è associato un numero reale che
prende il nome di determinante della matrice.
Esempi
a) La matrice A = 1 2 0
4 3 1
− − −
è una matrice di tipo 2 3× perché ha due righe e tre colonne.
b) La matrice F =
2 5
1 3
3 0
7 4
− − − −
è una matrice di tipo 4 2× perché ha quattro righe e due colonne.

247
c) La matrice H =
4 1 5
0 2 3
6 3 1
− − −
è una matrice di tipo 3 3× perché ha tre righe e tre colonne; H è,
quindi, una matrice quadrata di ordine 3.
Le matrici e i determinanti saranno oggetto di studio approfondito nei prossimi anni. Qui ci
interessiamo delle matrici quadrate di ordine 2 e di quelle diordine 3.
In generale, una matrice quadrata di ordine due è del tipo:
Ha b
c d
=
Possiamo pensare agli elementi di questa matrice come ai vertici di un quadrato; gli elementi a e d
si trovano su una diagonale del quadrato, gli elementi c e b sull’altra diagonale, come mostrato di
seguito:
H
=
a
d
b
c
La diagonale si chiama diagonale principale, la diagonale si chiama diagonale secondaria.
Il determinante, solitamente indicato con la lettera D, associato ad una matrice quadrata di ordine
2, è uguale alla differenza fra il prodotto degli elementi della diagonale principale ed il
prodotto degli elementi della diagonale secondaria; in simboli: D = a d c b⋅ − ⋅⋅ − ⋅⋅ − ⋅⋅ − ⋅
Spesso, per evidenziare gli elementi della matrice, il determinante ad essa associato viene indicato
racchiudendo gli elementi della matrice tra due linee verticali:
D = = ⋅ − ⋅a
a db
cc d
b
Una matrice quadrata di ordine tre è del tipo:
a b c
d e f
g h i
Nel caso di questa matrice, possiamo pensare che i suoi elementi siano sui lati di un quadrato di
vertici a, c, i, g; gli elementi a, e, i sono su una diagonale, mentre g, e, c sono sull’altra diagonale
come mostrato in figura:
b
d f
h
ca
g
e
i
La diagonale si chiama diagonale principale, la diagonale si chiama diagonale secondaria.
Esiste una regola che permette di calcolare il determinante associato ad una matrice di ordine 3.
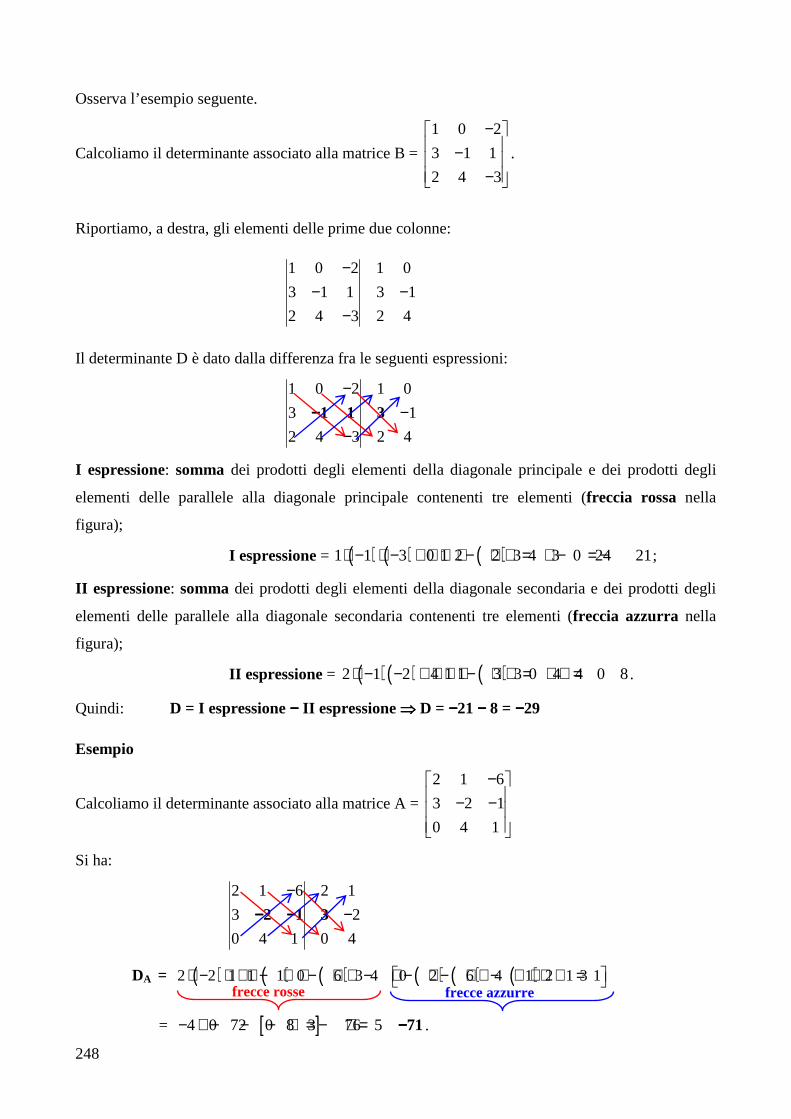
248
Osserva l’esempio seguente.
Calcoliamo il determinante associato alla matrice B =
1 0 2
3 1 1
2 4 3
− − −
.
Riportiamo, a destra, gli elementi delle prime due colonne:
1 0 2 1 0
3 1 1 3 1
2 4 3 2 4
−− −
−
Il determinante D è dato dalla differenza fra le seguenti espressioni:
1 0 2 1 0
3 1
2 4 3 2 4
− −
−1 1 3−−−−
I espressione: somma dei prodotti degli elementi della diagonale principale e dei prodotti degli
elementi delle parallele alla diagonale principale contenenti tre elementi (freccia rossa nella
figura);
I espressione = ( ) ( ) ( )1 1 3 0 1 2 2 3 4 3 0 24 21⋅ − ⋅ − + ⋅ ⋅ + − ⋅ ⋅ = + − = − ;
II espressione: somma dei prodotti degli elementi della diagonale secondaria e dei prodotti degli
elementi delle parallele alla diagonale secondaria contenenti tre elementi (freccia azzurra nella
figura);
II espressione = ( )( ) ( )2 1 2 4 1 1 3 3 0 4 4 0 8⋅ − − + ⋅ ⋅ + − ⋅ ⋅ = + + = .
Quindi: D = I espressione −−−− II espressione ⇒⇒⇒⇒ D = −−−−21 −−−− 8 = −−−−29
Esempio
Calcoliamo il determinante associato alla matrice A =
2 1 6
3 2 1
0 4 1
− − −
Si ha:
2 1 6 2 1
3 2
0 4 1 0 4
− −2 1 3− −− −− −− −
DA = ( ) ( ) ( ) ( ) ( ) ( )2 2 1 1 1 0 6 3 4 0 2 6 4 1 2 1 3 1 ⋅ − ⋅ + ⋅ − ⋅ + − ⋅ ⋅ − ⋅ − ⋅ − + ⋅ − ⋅ + ⋅ ⋅ =
= [ ]4 0 72 0 8 3 76 5− + − − − + = − + = 71−−−− .
frecce rosse frecce azzurre

249
PROVA TU
Calcola il determinante associato alle seguenti matrici:
a) 2 1
5 3
b) 3 2
1 1
− −
c)
2 1 0
3 1 2
5 2 4
− − −
ATTENZIONE
Non confondere la matrice con il determinante ad essa associata: la matrice è una tabella di
numeri reali, il determinante ad essa associato è un numero reale.
In simboli:
a b a b
c d c d≠≠≠≠
A questo punto è lecito chiedersi:
a) perché introdurre il concetto di matrice ed, in particolare, quello di determinante associato ad una
matrice di ordine 2 o di ordine 3?
b) esiste, forse, qualche relazione fra la soluzione di un sistema lineare e il determinante di una matrice
quadrata?
Proviamo a rispondere a queste domande.
In generale, un sistema lineare di due equazioni in due variabili (con coefficienti non nulli) è del
tipo:
' ' '
ax by c
a x b y c
+ = + =
(�)
Applicando il metodo di riduzione, è facile verificare che, se il sistema è determinato, la sua
soluzione è data da:
' '' '' '' '
cb c bxab a bac a cyab a b
− = − − = −
Facciamo qualche osservazione sulla forma delle espressioni ottenute per la variabile x e per la
variabile y:
� sia il numeratore che il denominatore delle espressioni ottenute per le due variabili sono la
differenza fra due prodotti;
� le espressioni ottenute per le due variabili sono due frazioni aventi lo stesso denominatore.

250
Ma anche il determinante associato ad una matrice di ordine 2 è la differenza fra due prodotti;
possiamo, allora, pensare ai numeratori e denominatori delle espressioni ottenute per le due variabili
come determinanti associati ad opportune matrici.
All’inizio del paragrafo abbiamo visto che è possibile associare ad un sistema di due equazioni in
due variabile una matrice quadrata di ordine 2 riportando nelle righe e nelle colonne i coefficienti
delle variabili. Questa matrice prende il nome di matrice dei coefficienti del sistema.
La matrice dei coefficienti del sistema (�) è ' '
a b
a b
; il determinante ad essa associato è:
D = ' '
a b
a b = ' 'ab a b−
Questo determinante è uguale al denominatore delle espressioni ottenute per le due variabili del
sistema.
Calcoliamo, adesso, il determinante associato alla matrice ' '
c b
c b
che si ottiene dalla matrice dei
coefficienti del sistema sostituendo i coefficienti della variabile x con i termini noti delle due
equazioni:
D = ' '
c b
c b = ' 'cb c b−
Questo determinante è uguale al numeratore dell’espressione ottenuta per la variabile x del sistema
e, in seguito, lo indicheremo con Dx.
Possiamo, allora, scrivere che ' '
' '
c b
c bx
a b
a b
= =DD
x
Calcoliamo, adesso, il determinante associato alla matrice ' '
a c
a c
che si ottiene dalla matrice dei
coefficienti del sistema sostituendo i coefficienti della variabile y con i termini noti delle due
equazioni:
D = ' '
a c
a c = ' 'ac a c−
Questo determinante è uguale al numeratore dell’espressione ottenuta per la variabile y del sistema
e, in seguito, lo indicheremo con Dy.
Possiamo, allora, scrivere che ' '
' '
a c
a cy
a b
a b
= =DD
y

251
Ricordiamo che un sistema è:
� determinato se ' '
a ba b
≠ ; ma ' ' ' ' 0 D 0' '
a b ab a b ab a ba b
≠ ⇒ ≠ ⇒ − ≠ ⇒ ≠ ;
� indeterminato se ' ' '
a b ca b c
= = ; ma D 0' '
a ba b
= ⇒ = ,
' ' ' ' 0 D 0' ' y
a c ac a c ac a ca c
= ⇒ = ⇒ − = ⇒ = ,
' ' ' ' 0 D 0' ' x
b c bc b c bc b cb c
= ⇒ = ⇒ − = ⇒ = ;
� impossibile se ' ' '
a b ca b c
= ≠ ; ma D 0' '
a ba b
= ⇒ = ,
' ' ' ' 0 D 0' ' y
a c ac a c ac a ca c
≠ ⇒ ≠ ⇒ − ≠ ⇒ ≠ ,
' ' ' ' 0 D 0' ' x
b c bc b c bc b cb c
≠ ⇒ ≠ ⇒ − ≠ ⇒ ≠ .
Possiamo, allora, affermare che:
un sistema lineare del tipo ' ' '
ax by c
a x b y c
+ = + =
(con tutti i coefficienti non nulli) è:
• determinato ⇔⇔⇔⇔ D ≠≠≠≠ 0;
• indeterminato ⇔⇔⇔⇔ D = 0 ∧∧∧∧ Dx = 0 ∧∧∧∧ Dy = 0;
• impossibile ⇔⇔⇔⇔ D = 0 ∧∧∧∧ (Dx ≠≠≠≠ 0 ∨∨∨∨ Dy ≠≠≠≠ 0).
Inoltre, se il sistema è determinato, si ha:
' 'DD
' '
x
c b
c bx
a b
a b
= == == == = ∧∧∧∧ =D ' 'D
' '
y
a c
a cy
a b
a b
====
PROVA TU
Determina la soluzione dei seguenti sistemi utilizzando il metodo di Cramer:
a) 2 8 0
4 1
x y
x y
− + − = − =
; b) 3 2 3
1
x y
x y
− = − =
12.8 Sistemi frazionari
Un sistema si dice frazionario o fratto se almeno una delle sue equazioni è un’equazione frazionaria.
Vediamo, con alcuni esempi, come si procede per determinarne la soluzione.

252
Esempio 1
Determiniamo l’insieme soluzione del seguente sistema:
2 1 31
35
xy
yx
− = + − =
Prima di tutto dobbiamo determinare il dominio di ciascuna delle equazioni che formano il sistema.
Osserviamo che ciascuna delle equazioni del sistema è un’equazione in due variabili; quindi il
dominio di ciascuna di esse è un sottoinsieme di R2 ( )×R R .
Indichiamo con D il dominio del sistema, D1 il dominio di 2 1 31
xy
− =+ e D2 il dominio di 3
5y
x− = .
Determiniamo D1: ( ){ }1 0 1y y+ ≠ ⇒ ≠ − ⇒ 21D , 1R x= − −= − −= − −= − − .
Determiniamo D2: ( ){ }0x ≠ ⇒ 22D 0,R y= −= −= −= − .
Non sono soluzioni del sistema, allora, tutte le coppie di numeri reali per le quali il primo elemento
è 0 oppure tutte quelle per le quali il secondo elemento è −1.
Si ha, allora: ( ) ( ){ },= ∩ = 21 2D D D , 1 0,R x y− −− −− −− −
Adesso possiamo applicare i principi di equivalenza e ridurre il sistema a forma normale:
( )2 1 3
2 1 3 1 2 1 3 3 2 3 41
5 3 5 33 3 55
xx y x y x yy
x y x yy y xx
− = − = + − = + − =+ ⇒ ⇒ ⇒ − = − − = −− − = =
Possiamo, ora, risolvere il sistema applicando uno dei metodi esposti nei paragrafi precedenti.
Classifichiamo il sistema:
2, 3 2 3; 3' 5 ' 1 ' '' 5, ' 1
a b a b a ba b a ba b
= = − − ⇒ = = = ⇒ ≠ −= = − ⇒ sistema determinato.
Applichiamo il metodo di sostituzione e, dalla seconda equazione del sistema, determiniamo
un’espressione per la variabile y:
( )
( )
2 3 42 3 4 2 15 9 4
5 3
13 13
5 3
5
5
1
1
3
5 3 5 3
3
xx y x x
y y xy
xx
yy x
x
x x
− =− = − − = ⇒ ⇒ ⇒ = = +=
=− = −
− ⇒ ⇒ ⇒ = += +
++
+
1
2
= −= −= −= −= −= −= −= −
x
y

253
Dobbiamo stabilire se la coppia ( )1, 2− − appartiene al dominio del sistema:
( )il primo elemento della coppia è diverso da 01, 2 D
il secondo elemento della coppia è diverso da 1
⇒ − − ∈
− i
i
L’insieme soluzione del sistema è, dunque, S = ( ){ }1, 2− −− −− −− − .
Esempio 2
Determiniamo l’insieme soluzione del seguente sistema:
33
6 83
1
yxx yy
+ = − =−
Prima di tutto dobbiamo determinare il dominio di ciascuna delle equazioni che formano il sistema.
Indichiamo con D il dominio del sistema, D1 il dominio di 3
3y
x+ = e D2 il dominio di
6 83
1x yy− =− .
Determiniamo D1: ( ){ }0x ≠ ⇒ 21D 0,R y= −= −= −= − .
Determiniamo D2: ( ){ }1 0 1y y− ≠ ⇒ ≠ ⇒ 22D ,1R x= −= −= −= − .
Non sono soluzioni del sistema, allora, tutte le coppie di numeri reali per le quali il primo elemento
è 0 oppure tutte quelle per le quali il secondo elemento è 1.
Si ha, allora: ( ) ( ){ },= ∩ = 21 2D D D 0, ,1R y x−−−−
Adesso possiamo applicare i principi di equivalenza e ridurre il sistema a forma normale:
( )
33 3 3 3 3 3 3
6 8 6 8 3 1 6 8 3 3 6 11 331
yy x x y x yx
x y x y y x y y x yy
+ = + = − = − = ⇒ ⇒ ⇒ − − = − − = − − = − =−
Possiamo, ora, risolvere il sistema applicando uno dei metodi esposti nei paragrafi precedenti.
Classifichiamo il sistema:
3, 1 3 1 1 1;' 6 2 ' 11 11 ' '' 6, ' 11
a b a b a ba b a ba b
= = − − ⇒ = = = = ⇒ ≠ −= = − ⇒ sistema determinato.
Applichiamo il metodo di Cramer:
D = ( ) ( ) ( )3 13 11 6 1 33 6 33 6
6 11
−= ⋅ − − ⋅ − = − − − = − + =
−27−−−− ;
Dx = ( ) ( ) ( )3 13 11 3 1 33 3
3 11
−= ⋅ − − − ⋅ − = − − =
− −36−−−−

254
Dy = ( )3 33 3 6 3 9 18
6 3= ⋅ − − ⋅ = − − =
−27−−−−
Allora: D 36D 27
xx −= = ⇒ −43
x ==== ; D 27D 27
yy −= = ⇒ − 1y ==== .
Dobbiamo stabilire se la coppia ( )4 ,13
appartiene al dominio del sistema:
( )il primo elemento della coppia è diverso da 0 4 ,1 D3il secondo elemento della coppia è uguale a 1
⇒ ∉
i
i
L’insieme soluzione del sistema è, dunque, S = ∅∅∅∅.
PROVA TU
Determina l’insieme soluzione dei seguenti sistemi:
a)
1 3 02
22
1
xy
x yx
− − = + − =+
; b)
14
12 4 0
3
yx
xy
+ = − − + =−
12.9 Sistemi letterali
Un sistema si dice letterale se, oltre alle variabili, sono presenti altre lettere dette parametri.
Salvo avviso contrario, le variabili di un sistema di due equazioni in due variabili sono indicate con
le lettere x e y; qualsiasi altra lettera è da considerarsi come parametro.
Generalmente, i sistemi letterali si risolvono applicando il metodo di Cramer.
Vediamo, con alcuni esempi, come si procede per determinarne la soluzione.
Esempio 1
Determiniamo l’insieme soluzione del seguente sistema:
( )( )1 1
1 1
a x ay a
ax a y a
− + = −
+ − = −
Prima di tutto, dobbiamo stabilire per quali valori del parametro a il sistema è determinato.
Calcoliamo, allora, il determinante associato alla matrice dei coefficienti del sistema:
D = ( )2 2 2 211 2 1 1 2
1
a aa a a a a a
a a
−= − − = − + − = − = ⇒
−D 1 2a−−−−
Nel paragrafo 12.7 abbiamo detto che un sistema è determinato se il determinante associato alla
matrice dei coefficienti è diverso da zero.
Allora, il sistema è determinato se 1 2 0a ⇒ − ≠ ⇒ 0 1D2
a≠≠≠≠ ≠≠≠≠

255
Per determinare la soluzione, calcoliamo Dx e Dy:
( )( ) ( ) ( ) ( )
( ) ( ) ( )( )
11 1 1 1 1
1 1
1 1 2
a aa a a a a a a
a a
a a
−= = − − − − = − − − =
− −
= − − ⇒
D
D 1 1 2= − −= − −= − −= − −
x
x a a
( ) ( ) ( ) ( ) ( ) ( )
( )( ) ( )( )
2 21 11 1 1 1 1 1
1
1 2 1
a aa a a a a a a a a
a a
a a
− −= = − − − = − − − = − − − =
−
= − − ⇒
D
D 1 1 2= − −= − −= − −= − −
y
y a a
.
Determiniamo, adesso, i valori di x e y che verificano entrambe le equazioni del sistema:
( )( )( )1 1 2D
;D 1 2
xa a
x aa
− −= = = −1
−
( ) ( )( )
D 1 1 21 .
D 1 2y a a
y aa
− −= = = −
−
La soluzione del sistema è, dunque, l’insieme S = ( ){ }, 1 1a a− −− −− −− − .
Determiniamo, ora, la soluzione del sistema nel caso in cui 12
a = .
1 0 D D2 x ya D= ⇒ = ∧ = 0 ∧ = 0 ⇒ il sistema indeterminato.
Possiamo, allora, così riassumere la soluzione del sistema:
{ }12
a Q∈ −∈ −∈ −∈ − ⇒⇒⇒⇒ sistema determinato, S = ( ){ } 1, 1a a− −− −− −− − ;
{ }12
a∈∈∈∈ ⇒⇒⇒⇒ sistema indeterminato.
Esempio 2
Determiniamo la soluzione del seguente sistema:
( ) ( )( )2 8 8 2
1 2 1
m x m y m
mx m y m
+ − − = −
+ + = +
Prima di tutto, dobbiamo stabilire per quali valori del parametro m il sistema è determinato.
Calcoliamo, allora, il determinante associato alla matrice dei coefficienti del sistema:
( ) ( ) ( ) ( )
( )( ) ( )( )
2 2 22 82 1 8 3 2 8 2 5 2
1
2 1 2
m mm m m m m m m m m m
m m
m m
+ − − = + + − − − = + + + − = − + = +
= − − ⇒ = D 2
D
1 2m m
====
− −− −− −− −
Ricordiamo che un sistema è determinato se il determinante associato alla matrice dei coefficienti è
diverso da zero.

256
Il sistema, quindi è determinato se
( )( )2 1 2 0m m m m ⇒ − − ≠ ⇒ 2 −1 ≠ 0 ∧ − 2 ≠ 0 ⇒ 1 2D 02
m m≠ ∧ ≠≠ ∧ ≠≠ ∧ ≠≠ ∧ ≠≠≠≠≠
Per determinarne la soluzione, calcoliamo Dx e Dy:
( ) ( ) ( ) ( ) ( )2 2
8 2 88 2 1 2 1 8
2 1 1
2 6 8 2 15 8 9
m mm m m m
m m
m m m m m
− − − = = − + − − + − = + +
= − + + + − − = − = ⇒
D
D − 9− 9− 9− 9
x
x m
( )( ) ( ) 2 2
2
2 8 22 2 1 8 2 2 4 2 8 2
2 1
4 3 2
m mm m m m m m m m m
m m
m m
+ −= = + + − − = + + + − + =
+
= − + ⇒ 2
D
D 4 3 2
y
y m m= − += − += − += − +.
Determiniamo, adesso, i valori di x e y che verificano entrambe le equazioni del sistema:
( )( )D 9 ;D 2 1 2
x mxm m
−= = − − ( )( )
2D 4 3 2 .D 2 1 2
y m mym m
− += = − −
La soluzione del sistema è, dunque, l’insieme S = ( ) ( ) ( )( ),
29 4 3 22 1 2 2 1 2
m m mm m m m
− − +− − +− − +− − +− − − −− − − −− − − −− − − −
.
Determiniamo, ora, la soluzione del sistema nel caso in cui 12
m= oppure m = 2.
1 1 9D 0 D2 2 2xm= ⇒ = ∧ = −9 ⋅ = − ≠ 0 ⇒ sistema impossibile;
m = 2 ⇒ D = 0 ∧ Dx = 9 2− ⋅ = −18 ≠ 0 ⇒ sistema impossibile.
Possiamo, allora, così riassumere la soluzione del sistema:
{ }1 ,22
m Q∈ −∈ −∈ −∈ − ⇒⇒⇒⇒ sistema determinato, S = ( ) ( ) ( )( ),
29 4 3 22 1 2 2 1 2
m m mm m m m
− − +− − +− − +− − +− − − −− − − −− − − −− − − −
;
{ }1 ,22
m∈∈∈∈ ⇒⇒⇒⇒ S = ∅∅∅∅.
Esempio 3
Determiniamo la soluzione del seguente sistema:
3
2 4
yk
xx k
y
− = + =
Questo sistema è un sistema letterale frazionario:

257
� letterale: oltre alle variabili x e y, è presente il parametro k;
� frazionario : le variabili sono presenti al denominatore di almeno una delle frazioni.
È necessario, quindi, determinare il suo dominio; dovrà essere:
x ≠ 0 ∧ y ≠ 0 ⇒ D = ( ) ( ){ }2 0, , ,0Q y x− .
Riduciamo il sistema a forma normale:
33 3
2 2 4 4 24
yk y kx kx yx
x x ky x kyky
− = − = − = − ⇒ ⇒ + + = − = − =
Stabiliamo per quali valori del parametro k il sistema è determinato e, dunque, calcoliamo il
determinante associato alla matrice dei coefficienti del sistema:
( ) ( ) ( )( ) ( )( )214 1 1 4 1 1 2 1 2
1 4
kk k k k k
k
−= ⋅ − − ⋅ − = − + = + − ⇒
−=D 1D 1 2 2k + k==== −−−−
Ricordiamo che un sistema è determinato se il determinante associato alla matrice dei coefficienti è
diverso da zero.
Il sistema, quindi è determinato se
( )( )1 2 1 2 0 1 2 1 2k k k k ⇒ − + ≠ ⇒ − ≠ 0 ∧ + ≠ 0 ⇒ 1D 02
k ≠ ±≠ ±≠ ±≠ ±≠≠≠≠
Per determinarne la soluzione, calcoliamo Dx e Dy:
( ) ( ) ( ) ( ) ( )3 13 4 2 1 12 2 2 6 1
2 4k k k
k
− −= = − ⋅ − − − ⋅ − = − = − ⇒
− −=D D 2 6 1x x k −−−−
( ) ( )32 1 3 2 3
1 2
kk k
−= = ⋅ − − ⋅ − = − + ⇒
−D D 3 2y y k= −= −= −= − .
Determiniamo, adesso, i valori di x e y che verificano entrambe le equazioni del sistema:
( )( )( )
2 6 1D;
D 1 2 1 2x
kx
k k
−= =
− + ( )( )D 3 2 .D 1 2 1 2
y kyk k−= =
− +
La soluzione del sistema è, dunque, l’insieme S = ( )
( )( ) ( )( ),
2 6 1 3 21 2 1 2 1 2 1 2
k kk + k k + k
−−−− −−−−− −− −− −− −
.
Determiniamo, ora, la soluzione del sistema nel caso in cui 12
k = oppure 1
2k = − .
( )1 1D 0 D 6 12 2xk = ⇒ = ∧ = 2 ⋅ − = 2 ⋅2 = 4 ≠ 0 ⇒ sistema impossibile;
12
k = − ⇒ D = 0 ∧ Dy = ( )13 2 42
− − = ≠ 0 ⇒ sistema impossibile.

258
Ricordiamo che le coppie del tipo ( )0,y e ( ),0x non sono soluzione del sistema. Determiniamo,
allora, i valori del parametro k per i quali la soluzione prima determinata non è da considerare
soluzione del sistema:
( )( )( )
2 6 10 ;
1 2 1 2
kx k
k k
−= ⇒ = 0 ⇒ 6 −1 = 0 ⇒
− +16
k ====
( )( )3 20 .
1 2 1 2ky k
k k−= ⇒ = 0 ⇒ 3− 2 = 0 ⇒
− +3=2
k
Per questi valori di k, la soluzione determinata è un elemento non appartenente al dominio.
Possiamo, allora, così riassumere la soluzione del sistema:
{ }1 3 1, ,2 2 6
k Q∈ − ±∈ − ±∈ − ±∈ − ± ⇒⇒⇒⇒ sistema determinato, S = ( )
( )( ) ( )( ),
2 6 1 3 21 2 1 2 1 2 1 2
k kk + k k + k
−−−− −−−−− −− −− −− −
;
{ }1 3 1, ,2 2 6
m∈ ±∈ ±∈ ±∈ ± ⇒⇒⇒⇒ S = ∅∅∅∅.
PROVA TU
Risolvi i seguenti sistemi:
a) ( )
( ) ( )2 1 3
2 1 2 1
bx b y
b x b y
− + =
− + − =; b)
( )
2 11
3 3
m mx y
mx m y m
− = + − − =
.
12.10 Sistemi di tre equazioni con tre variabili
In questo paragrafo ci limitiamo a considerare sistemi con tre equazioni ed altrettante variabili.
Il caso più generale, sistemi con m equazioni ed n variabili, sarà trattato negli anni successivi.
Determiniamo la soluzione del seguente sistema:
3 2
2 2 3
2 1
x y z
x y z
x y z
− + = + − = −− − + =
Possiamo procedere in tre modi diversi: metodo di Cramer, metodo di sostituzione, metodo di
riduzione.
Metodo di Cramer
Il procedimento è simile a quello già usato per i sistemi di due equazioni in due variabili.
Indichiamo con:
� D il determinante associato alla matrice dei coefficienti del sistema;
� Dx il determinante associato alla matrice ottenuta dalla matrice dei coefficienti sostituendo ai
coefficienti della variabile x i termini noti;

259
� Dy il determinante associato alla matrice ottenuta dalla matrice dei coefficienti sostituendo ai
coefficienti della variabile y i termini noti;
� Dz il determinate associato alla matrice ottenuta dalla matrice dei coefficienti sostituendo ai
coefficienti della variabile z i termini noti.
Se D ≠≠≠≠ 0 il sistema è determinato ed i valori delle variabili che verificano tutte le equazioni del
sistema sono date da:
DD
xx ==== DD
yy ==== DD
zz ====
Determiniamo, allora, la soluzione del sistema.
Applicando la regola per calcolare il determinante associato ad una matrice di ordine 3 (par. 12.7),
si ottiene:
D = [ ]1 1 3
1 2 2 2 2 6 6 4 1 6 3
1 2 1
−− = − − − − + − = − + =
− −3−−−− .
D ≠≠≠≠ 0 ⇒⇒⇒⇒ sistema determinato.
Dx = ( )2 1 3
3 2 2 4 2 18 6 8 3 24 17
1 2 1
−− − = + + − + + = − =
−7 ;
Dy = ( )1 2 3
1 3 2 3 4 3 9 2 2 4 9
1 1 1
− − = − + + − − + = − =−
5−−−− ;
Dz = ( )1 1 2
1 2 3 2 3 4 4 6 1 5 1
1 2 1
−− = − − − − + − = − − =
− −6−−−− .
Determiniamo, ora, i valori delle variabili x, y, z:
D 7D 3
x = =−73
x = −= −= −= − ; D 5D 3
y −= =−53
y ==== ; D 6D 3
z −= =− 2z ====
L’insieme soluzione del sistema è S = ( ){ }7 5, ,23 3
− .
Metodo di sostituzione
• ricaviamo la variabile x dalla prima equazione e sostituiamo l’espressione ottenuta alla
variabile x nelle altre due equazioni;
• ricaviamo la variabile y dalla seconda equazione e sostituiamo l’espressione ottenuta alla
variabile y nella terza equazione;

260
• risolviamo la terza equazione che ha la sola variabile z;
• sostituiamo il valore di z così ottenuto nelle altre equazioni determinando, così, uno alla volta,
i valori delle altre variabili del sistema.
Osserva, allora, attentamente i seguenti passaggi:
3 2
2 2 3
2 1
x y z
x y z
x y z
− + = + − = −− − + =
⇒
( )
2 3
2 3
2 3
2 2 3
2 1
x
y z
y z
y z
zy z y
= + − = −− − + =
+ −+ −
− + ⇒
2 3
3 5 5
2 3 2 1
x y z
y z
y z y z
= + − − = −− − + − + =
⇒
⇒
2 3
3 5 5
3 4 3
x y z
y z
y z
= + − − = −− + =
⇒ 5 53
5
2 3
3 353
4
z
z
x y z
y
z
−
−
= + −
=
− + =
⇒
2 3
5 53
5 5 4 3
x y z
zy
z z
= + − −=
− + + =
⇒
⇒
2 3
53
2
5
x y z
zy
z
= + − −
=
=
⇒ 2
2
53
2
3
5
x y z
y
z
= + − ⋅ −
=
=
⇒ 53
3
2
2
y
z
x y z= + −
=
=
⇒
⇒ 53
2
2
52 33
y
z
x = + − ⋅ =
=
⇒
73
532
x
y
z
= −
=
=
L’insieme soluzione del sistema è, dunque, l’insieme S = ( ){ }7 5, ,23 3
− .
Metodo di riduzione
Risolviamo il sistema precedente applicando una combinazione del metodo di riduzione e del
metodo di sostituzione.
3 2
2 2 3
2 1
x y z
x y z
x y z
− + = + − = −− − + =
Osserviamo che i coefficienti delle variabili x e y, nella seconda e terza equazione del sistema, sono
opposti; scriviamo, allora, il sistema equivalente a quello dato sostituendo la seconda equazione con
quella che si ottiene sommando la seconda e la terza equazione. Si ottiene:
3 2
2 2 3
2 1
x y z
x y z
x y z
− + = + − = −− − + =
⇒
3 2
2 1
x y z
x y z
− + =− − + =
2z ====

261
Sostituiamo il valore così ottenuto per la variabile z nelle altre equazioni del sistema; si ottiene:
2
1
2
2
3
2
x y
x y
− + ⋅ =− − + =
2z ==== ⇒
6 2
2 2 1
x y
x y
− + =− − + =
2z ==== ⇒
4
2 1
x y
x y
− = −− − = −
2z ====
Osserviamo che i coefficienti della variabile x, nella prima e nella terza equazione del sistema, sono
opposti; scriviamo, allora, il sistema equivalente che sostituendo alla terza equazione quella che si
ottiene sommando le due equazioni. Si ottiene:
4
3 5
x y
y
− = −− = −
2z ==== ⇒
4
53
x y
y
− = −
−= −
2z ==== ⇒
4x y
− = −
2
53
z
y
====
====
Sostituiamo il valore così ottenuto per la variabile y nella prima equazione del sistema; si ottiene:
5 43
x − = −
2
53
z
y
====
====
⇒
543
x = − +
2
53
z
y
====
====
⇒
73
2
53
= −= −= −= −
====
====
x
z
y
L’insieme soluzione del sistema è S = ( ){ }7 5, ,23 3
− .
PROVA TU
1) Risolvi con il metodo di Cramer il seguente sistema:
2 2 3
3 1
3 1
x y z
x y z
x y z
− + = − + − = − + =
2) Risolvi con il metodo di sostituzione il seguente sistema:
2 1
4 2
2 1
x y z
x y z
x y z
+ − = − + = − + =
3) Risolvi con il metodo di riduzione il seguente sistema:
2 3 3
1
4 2
x y z
x y z
x y z
− + = + − =− − + =
262
ESERCIZI CAPITOLO 12
Sistemi lineari
Conoscenza e comprensione
1) Che cosa si intende per sistema?
2) Come puoi classificare un sistema di equazioni in base alle sue soluzioni?
3) Come puoi classificare un sistema di equazioni in base alla sua forma?
4) Il sistema
2 1 1 23
3 02
a cb
b c a cb
+ − + = + + − =
è un sistema letterale intero.
Quali sono le variabili del sistema?
5) Uno solo fra i seguenti sistemi è di secondo grado. Quale?
a) 2
2
2 1 0
3 1
x y
x y
+ − =
+ = b)
2
3 1
3 5 0
x y
x y
− =
+ = c)
5 2 3
4
x xy y
xy
+ − = =
d) 7
2 5
x y
xy x y
+ = + + = −
e) 1
5 0
y x
y
= + − =
6) Perché un sistema di equazioni di primo grado è detto anche sistema lineare?
7) Una sola delle seguenti affermazioni è vera; quale?
a) Un sistema lineare ha sempre una sola soluzione.
b) Un sistema lineare ha al massimo una soluzione.
c) Se un sistema lineare ha almeno due soluzioni, allora ne ha infinite.
d) Un sistema lineare ha sempre almeno una soluzione.
e) Un sistema lineare ha sempre un numero finito di soluzioni.
8) L’insieme S = ( ){ }3, 2− è soluzione di uno solo dei seguenti sistemi. Quale?
a) 3 9 0
1 0
x y
x y
− − = − + =
b) 7 3 15
13 15 9 0
x y
x y
+ = + − =
c) 6 9 0
2 1
x y
x y
+ + = = − −
d) 11 12 9
9 5 12
x y
x y
+ = − =
e) 4 3 6
2 1 0
x y
x y
= + + + =
9) Sia ' ' '
ax by c
a x b y c
+ = + =
un sistema con tutti i coefficienti non nulli.
Le seguenti affermazioni sono vere o false?
a) Se ''
a ab b
≠ il sistema è determinato. V F

263
b) Se '' ' '
a c a cb c b c
= ∧ = il sistema è indeterminato. V F
c) Se ' ' 0ab a b− = il sistema è impossibile. V F
d) Se ' 'ab a b= il sistema non è determinato. V F
e) Se ' ' 'a a b b c c= = il sistema è indeterminato. V F
f) Se ' ' ' ' 0ac a c bc cb− = − = il sistema è indeterminato. V F
g) Se ' ' 0ac a c− = il sistema è determinato. V F
10) Uno solo dei seguenti sistemi lineari non è determinato. Quale?
a)
1 2 12 3 4
1 422 3
x y
x y
− = = −
b)
2 14 6
233
x y
y x
− = = −
c) 3 4 6 0
4 23
x y
y x
+ − = = +
d)
3 42 3 3
1 42
yx
y x
− = = −
e)
3 22 3
43 9
x y
xy
− = = −
11) Dei seguenti sistemi
(1) 6 5 15
635
x y
y x
+ = = −
(2) 2 5 5 0
1 12 2
x y
y x
+ + = = − −
(3) 2 5 25 0
2
x y
y x
− − = = − +
possiamo dire che:
a) (1), (2) e (3) sono equivalenti;
b) (1) e (3) sono determinati;
c) (2) e (3) sono indeterminati;
d) (1) è determinato e (3) è impossibile;
e) (1) e (2) sono equivalenti.
12) Le seguenti proposizioni si riferiscono al sistema, nelle variabili x e y,
3 6 2
9 4 2 0
kx y
x y
+ = + + =
( )k∈ R .
Stabilisci se esse sono vere o false.
a) Per qualsiasi valore di k il sistema ammette almeno una soluzione. V F
b) Per qualsiasi valore di k il sistema ammette una sola soluzione. V F
c) Per qualsiasi valore di k, l’insieme soluzione del sistema è V F
S = ( ){ }2, / 0a b R a∈ ≠ .
d) Per qualsiasi valore di k, l’insieme soluzione del sistema è V F
S = ( ){ }2, / 0a b R b∈ ≠ .

264
e) Se 4 5k< < , l’insieme soluzione può essere S = ∅. V F
f) Se 113
k = , si ha S = ( ){ }2,4− V F
13) Quale, fra le seguenti equazioni, è necessario aggiungere all’equazione 4 2 5x y− = − affinchè
tali equazioni formino un sistema indeterminato?
a) 322
y x= + ; b) 522
y x= − + ; c) 322
y x= − ;
d) 2 5y x= + ; e) 2 5y x= − .
14) Quale, fra le seguenti equazioni, è necessario aggiungere all’equazione
4 3 6 0x y+ + = affinchè l’insieme soluzione del sistema sia S = ∅?
a) 6 8 12 0x y+ + = ; b) 4 63
y x= + ; c) 9 93 04 2
x y+ + = ;
d) 4 63
y x− = ; e) 463
y x= − .
15) Osserva la figura:
Di quale, fra i seguenti sistemi, ne è l’interpretazione grafica?
a) 1
2 3 1 0
y x
x y
= − − + =
b) 3 5 0
2 13 3
x y
y x
− + = = +
c) 3 5 0
2 13 3
x y
y x
− + = = +
d) 2 3 3 0
1 53 3
x y
y x
− + = = +
e) 4 6 1 0
2 13 3
x y
y x
− + = = +
16) L’interpretazione grafica del sistema ( )2 3 4
2 4
x y
y x
− = = − +
è
a) una coppia di rette parallele e distinte;
b) una coppia di rette parallele e coincidenti;
c) una coppia di rette che si intersecano nel punto F( )0, 4− ;
d) una coppia di rette passanti per l’origine degli assi;
e) una coppia di rette che si intersecano nel punto H( )1, 2− − .

265
17) Il determinato associato alla matrice 1 3
2 2
− −
è uguale a:
a) −8; b) −4; c) 8; d) 4; e) 0.
18) Il determinante associato alla matrice
1 2 0
0 1 2
3 3 4
− − −
è uguale a:
a) −14; b) 10; c) −10; d) 8; e) 14.
19) Del sistema 11 4 8 0
9 4 12 0
x y
x y
− − = + − =
possiamo dire che:
a) l’insieme soluzione è S = ∅;
b) l’insieme soluzione S ha un numero infinito di elementi;
c) l’insieme soluzione è S = ( ){ }41,3
;
d) l’insieme soluzione è S = ( ){ }31,4
− ;
e) l’insieme soluzione è S = ( ){ }31,4
;
20) Del sistema 11 6 4 0
11 26 3
x y
y x
+ + = = − −
possiamo dire che:
a) la coppia ordinata ( )2,3− è soluzione del sistema;
b) l’insieme soluzione del sistema è S = ∅;
c) l’insieme soluzione è S = ( ){ }2,3− ;
d) la coppia ordinata ( )2, 3− è soluzione del sistema;
e) l’insieme soluzione S ha un numero finito di elementi.
21) Siano D, Dx, Dy i determinanti che consentono di risolvere il sistema ' ' '
ax by c
a x b y c
+ = + =
; allora:
a) se D = 0 il sistema il sistema ha un numero finito di soluzioni;
b) se D = 0 ∧ Dx ≠ 0 il sistema non ha soluzione;
c) se Dx = 0 ∧ D ≠ 0, il sistema non ha soluzione;
d) se D = 0 il sistema non ha soluzione;
e) se Dx = 0 il sistema ha un numero infinito di soluzioni;

266
ESERCIZI
Senza risolverli, stabilisci se i seguenti sistemi sono determinati, indeterminati o impossibili.
1) 3 2 7
3 7
x y
x y
− = − =
; 1 322 6
y x
x y
= − + =
; 4 6
3 12 18
x y
x y
− = − =
2) 4 5 2
8 10 5
x y
x y
− = − − = −
; 6 4 3
1 32 2
x y
xy
+ = = −
; 6 8 13
3 4 15
x y
x y
− = + =
Completa inserendo al posto dei puntini opportuni coefficienti in modo che i seguenti sistemi siano
indeterminati:
3) 3 6 ......
..... 2
x y
x y
− = − =
; 2 ..... 6
.... 2 3
x y
x y
+ = − =
; 3 ......
.... 12 16
x y
x y
+ = + =
4) .... 9 3
6 .... 4
x y
x y
− = + =
; 7 ..... .....
5 3 6
x y
x y
− = + =
; 3 2.....
5 .....
x y
x y
+ = − =
Esempio
Determiniamo per quale valore del parametro m il sistema ( )2 1 2
3 4
m x y
x y m
− + =
− = non è determinato.
Un sistema non è determinato se ' '
a ba b
= .
Nel sistema assegnato si ha:
2 1 2 1
' 3' 3
a m a maa
= − − ⇒ ==
; 1
1'' 1
b bbb
= ⇒ = −
= −
Il sistema non è determinato se 2 1 13
m− = − . Si ha:
2 1 13
m− = − ⇒ 2 1 3m− = − ⇒ 2 2m= − ⇒ 1m= −
Il sistema, allora, non è determinato se m = −−−−1.
▪ Se 1m = −= −= −= − , il sistema diventa 3 2
3 4
x y
x y
− + = − = −
.
In questo sistema
1
' '' ' '1
' 2
a ba b a b c
a b ccc
= = − ⇒ = ≠
= − ⇒ sistema impossibile.

267
Determina per quali valori del parametro i seguenti sistemi, nelle variabili x e y, non sono
determinati; stabilisci, successivamente, se per tali valori sono indeterminati o impossibili.
5) ( )3 1 6
2
hx h y
x y h
− + =
+ =;
( )( )
2 3 5 1
2 3 0
b x y
x b y b
− − =
+ + + =
2; indet.
1, indet.; 1, imp.
h
b b
= = = −
6) ( )
( )2 4 1
2 1
x m y m
x my m
+ − = +
+ = +;
( ) ( )( )
3 2 5
2 1 2 1
a x a y
a x y
− + + =
− + =
4, imp.;m
a
= − ∃ ∈ R
7) ( ) ( )( )2 3 4 2 3
1 5 0
k x y k
k x ky
+ − = −
− + + =;
( )2 1 3 1 0
4 9 2
t x t
x y
+ − − =
− =
14 , imp.;2
3, imp.
k k
t
= − ∨ = = −
Individua, fra i seguenti sistemi, quelli che hanno come rappresentazione grafica una coppia di
rette incidenti, una coppia di rette parallele e distinte oppure una coppia di rette parallele e
coincidenti:
8) 2 1
2 4 2
x y
x y
− = + =
; 2 5 1 0
4 10 2
x y
x y
− − = − =
; 3 0
1
x y
x y
− + = + =
9) 2 3
4 2 6
y x
x y
= − + =
; 6 4 2
3 2 1 0
x y
x y
− = − − =
; 8 6 4
3 24 3
x y
y x
− = = +
10) 1 64
3 12 24
y x
x y
= − − =
; 2 0
3 0
x
y
− = − =
; 3 4 8
3 24
x y
y x
+ = = − −
11) Scrivi i sistemi che hanno come rappresentazione grafica le seguenti figure:
...............................
...............................
...............................
...............................
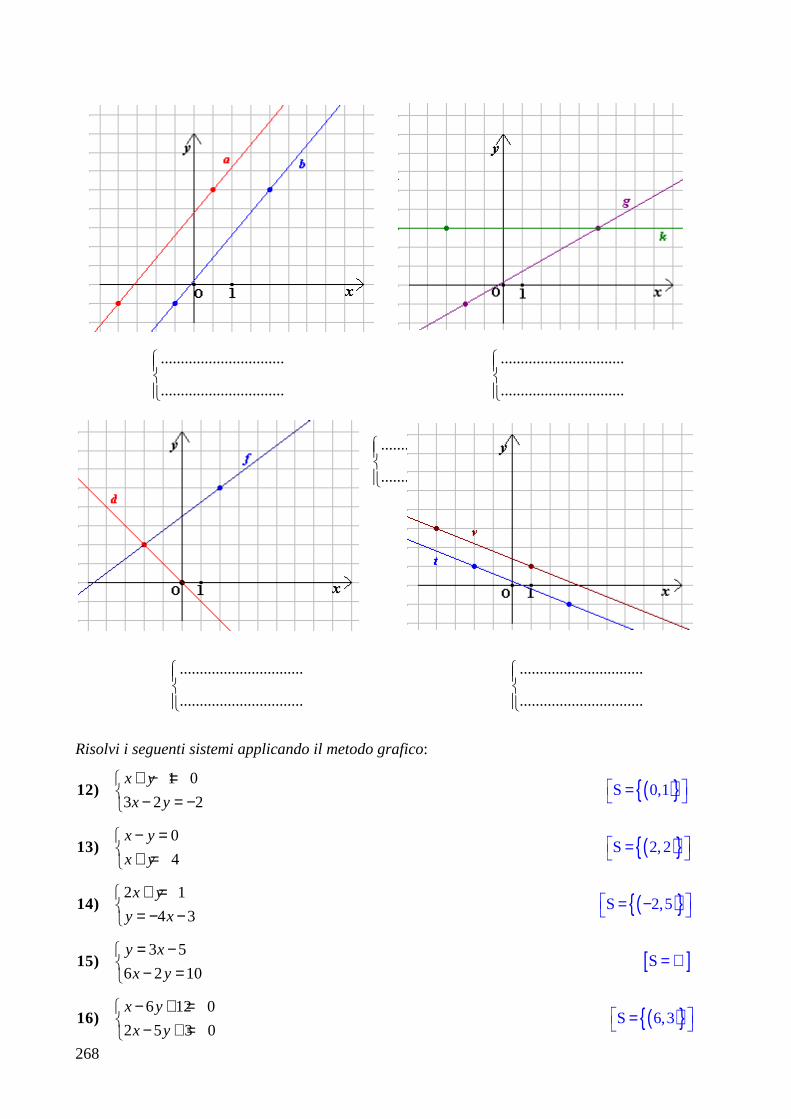
268
...............................
...............................
...............................
...............................
...............................
...............................
...............................
...............................
...............................
...............................
Risolvi i seguenti sistemi applicando il metodo grafico:
12) 1 0
3 2 2
x y
x y
+ − = − = −
( ){ }S 0,1 =
13) 0
4
x y
x y
− = + =
( ){ }S 2,2 =
14) 2 1
4 3
x y
y x
+ = = − −
( ){ }S 2,5 = −
15) 3 5
6 2 10
y x
x y
= − − =
[ ]S= ∅
16) 6 12 0
2 5 3 0
x y
x y
− + = − + =
( ){ }S 6,3 =

269
Dopo averli classificati, risolvi i seguenti sistemi applicando il metodo di sostituzione:
17) 4 7 0
3 2 7
x y
x y
− + = + =
( ){ }S 1,2 =
18) 6 7 4
2 3 2
x y
x y
+ = + =
( ){ }1S ,12
= −
19) 5 3 1
4 5
x y
x y
+ = + =
( ){ }S 2, 3 = −
20) 7 5
2 3 1
x y
x y
− = + =
( ){ }22 9S ,17 317
= −
21) 2
34 0
x y
x y
− = + − =
( ){ }9 1S ,2 2
= −
22) ( )( ) ( )
3 2 2
3 5 3 4 5 8 5
x y x y
x y x
+ = − +
+ − + = − ( ){ }1S 1,
4 =
23)
1 22 4 3
3 14 2 3
yx
y x yx
+ − = −− = +
( ){ }5 8S ,3 3
=
Dopo averli classificati, risolvi i seguenti sistemi applicando il metodo di confronto:
24) 4 0
5 2
x y
x y
+ − = − =
; 2 2 1
2 2
x y
x y
− = − + =
( ){ } ( ){ }1S 1,3 ;S ,12
= =
25) 3 9 11
4 3 6
y x
x y
= − = +
( ){ }2S 1,3
= −
26) ( )
( )2 3 3
2 1 2
x y
x y
+ =
+ − = ( ){ }S 0,2 =
27) 3 1 0
3
x y
x y
− + = + =
( ){ }1 5S ,2 2
=
28) ( )
3 25 10 51 12
yx
x y
− = + =
( ){ }S 2,0 =
29) ( )
23 1 14 6 2
3 2
yx
x y
+ + − = − =
( ){ }17 1S ,21 7
=

270
Dopo averli classificati, risolvi i seguenti sistemi applicando il metodo di riduzione:
30) 2 4 1
4 2
x y
x y
− = + =
( ){ }1S 1,4
=
31) 3 2 9
3 5 6
x y
x y
− =− + =
( ){ }19S ,53
=
32) 6 2 3
3 2 4 0
y x
x y
= − + − =
( ){ }5 1S ,3 2
= −
33) 5 3 3 0
3 2 1 0
x y
x y
− + = − + =
( ){ }S 3, 4 = − −
34) ( ) ( )( ) ( )
2 1 4 1 8 0
3 1 2 2 1 5
x y
x y
− − + + =
+ − − = ( ){ }3S 2,
2 =
35)
3 15 2
12 3
yx
yx
+ = + =
( ){ }10S , 23
= −
36) ( )
3 42 1 12 3 2
3 3 2 0
yx x
x y
− + +− = − + + =
( ){ }2 4S ,3 3
= −
Dopo averli classificati, risolvi i seguenti sistemi applicando il metodo di Cramer:
37) 5 2 3
4 2 3
x y
x y
− = + =
; 6 3 1
2 4
x y
x y
− = + =
( ){ } ( ){ }2 1 13 11S , ;S ,3 6 12 6
= =
38) 4 5 12
3
x y
y x
− = − = +
( ){ }S 3,0 = −
39) 32
11 2 4 0
y x
x y
= − − =
( ){ }1 3S ,2 4
=
40) ( )
( ) ( )3 2 1
5 1 2 1 0
x y x y
x y
− + = −
+ + − = ( ){ }1 16S ,
9 9 = −
41)
5 13 6
2 2 03
x y
yx
+ = − + =
( ){ }3 3S ,4 2
= −
42) ( ) ( )
12 13 2 2
2 3 1
y x yx
x y x y
− + − + = + − − =
( ){ }6S 5,5
=

271
Risolvi i seguenti sistemi con il metodo che ritieni opportuno:
43) 3 6 4
3 4 6
x y
x y
− = − + =
( ){ }2S ,13
=
44) 2 3
2 1 13 3
x y
x y
+ = −− − =
[sistema indeterminato]
45) 4 3 3 0
4 17 0
x y
x y
− + = − + =
( ){ }S 3,5 =
46) 1 1 12 2
4
x y
x y
− = − =
[ ]S= ∅
47) 1
3 5
15 3
yx
yx
− = − = −
( ){ }15 15S ,2 2
=
48) 3 3
1
x y
x y
− = − − =
( ){ }S 2, 3 = − −
49) 3 1 18 4 21 4 3 3
x y
y x
+ = + = −
( ){ }S 2, 1 = −
50) 11
4 38
x y
x y
+ = + =
( ){ }S 2,9 =
51)
( )2 4 22
3 3 3312
x y x y
x y
− + ++ − = + + =
( ){ }1S 0,2
=
52) ( ) ( )3 1 2 1 2
2 15 215 10 10
x y x y
yx
− + − = + ++ + =
[sistema indeterminato]
53) 3 3
28 2
5
x y x y
x y
+ + − − + = + =
( ){ }S 5,0 =
54) ( ) ( )( )
23 1 1
3 2 4 0
x y y y y y
x y
− − + = − +
− + = ( ){ }S 2,3 = −
55) ( ) ( ) ( )( ) ( )2 22 2 2 3 6
5 4 7
x y x y x y x x
x y
− + − + + − = − +
− = ( ){ }S 3,2 =

272
56) 14 34
5 3 153
yx
x y
+ + + = − =
( ){ }S 4,1 =
57)
1 1 34 2 2
423 3
x y
yx y
+ = − − + =
( ){ }S 2, 4 = −
58)
2 07 3
372 5 5
x yx
yx
− − = + =
( ){ }S 14,2 =
59) ( )
2 3 12 3
1 12 33 2
x y
x x y
+ −= + = + +
( ){ }1 1S ,2 9
= −
60) ( ) ( )2 4 3 12
1 1 312 33 4 2 4 12
x y
x y x y
− = − + − − − − =
( ){ }S 2,8 = −
61) ( )1 1 23
4 5 5
6 15 6 2
y x
yx
+ =
+ =
( ){ }S 2,1 =
62)
1 2 2 02
2 23 12 2 4
x y
yx
+ − = ++ − =
( ){ }S 0,1 =
63) ( )1 0
3
3 42
x y
x y
+ − = + =
( ){ }6 11S ,5 5
=
64)
32 3
181 07 9
y x yx
yx
+ = − + −− + =
( ){ }S 7,9 = −
65)
1 225 4
05 2
x y
x y x y
+ = − + − − =
( ){ }1S 3,2
=

273
66)
110 2 2
3 83 5 15
yx
x y
+ = − =
( ){ }5 1S ,2 2
=
67)
( ) ( )4 1 015 3
15 3 5
x y x y
yx
+ − −− =
= −
( ){ }1 1S ,3 5
=
68) ( ) ( ) ( )
( ) ( ) ( )
2 1 3 4 2 3
2 1 2 1 23 2 3
x x y x x
x yx y y y
− + − = − + + − = + − +
[ ]S= ∅
69) 3 2 6
3 2 151 1 3 3
x y
x y x
+ = + = − + −
( ){ }S 2,0 =
70)
2 23 171 1 1
1 32
x y x y x yx y x y xy
x x y
+ − − + −− = − − + − − = +
( ){ }S 4,4 =
71)
5 33 1 2
2 1 12 4 2
x yx y
x yx y
+ + = − − + − − =−
( ){ }S 1,2 = −
72)
10 02 10 2 10
1030 310 10
yxx y
yx
+ − = + +
++ + =
[sistema indeterminato]
73)
3 1 03
1 31
x y
xy
− = + =+
( ){ }1S 3,3
=
74) 2 3 4
4 1 10 01 1 1
x y
x y x
+ = + − = − + −
( ){ }2S 3,3
= −
75)
1 12 2 2
11
1
x yx y
x yx y
+ − = − − − + =+ +
[sistema indeterminato]
274
76)
( ) ( ) ( )2
13 32 4 2 2
2 2 3 1 4
yxx y
x y x x
+ + + = − − + − + = − +
[ ]S= ∅
77)
2 2 85 3 15
1 322
x y
xy y
+ = +
− = −
( ){ }4 2S ,3 3
=
78)
3 3 2 2
2 32 13 2 33 1 2 1 0
yx
xy x yx yx y x xy y
+ − = + + + − + =++ − +
( ){ }1S 1,2
= −
79) ( )
( )4 3 8 3
2 4 3 1
a x ay
ax a y
− − =
− + = ( ){ }9 6S ,
36 72a aa + +∀ ∈ = − −
R,
80) 2 3
2 3 4
x ky k
kx y k
+ = −− + = +
( ){ }S 3,2k ∀ ∈ = − R,
81) ( )2
6 6 3 2
6 6 2 3
x y a
a x y a a
+ = + + = +
{ } ( ){ }
{ }
11 S ,3 2
1,1 , sistema indetrminato
aa
a
∈ − ± =
∈ −
R ,
82) ( ) ( )
( )( ) ( )2 1 3 1
2 2 1
s x y s s
s x y x
− + + = −
+ + = −
{ } ( )
{ }
1 4 3,0 S ,2 2 12 1
1 ,0 ,S2
ssss s
s
−∈ − − = − ++ ∈ − = ∅
R ,
83) 1
1
x yb
yx
b
+ = + =
{ } ( ){ }{ }{ }{ }
0, 1 S ,1 1
0 , sistema perde di significato
1 , sistema indeterminato
1 , sistema impossibile
b bbb b
b
b
b
∈ − ± = + +
∈ ∈ ∈ −
R ,
84) ( )
( ) ( ) 2
2
2 2
hx h y h
h x h y h
+ − = −
+ + − = −
{ } ( ){ }{ }
1,2 S ,2 2
1,2 , sistema indetrminato
h hh
h
∈ − − = −
∈ −
R ,
85) ( )( ) ( )( ) ( ) ( ) ( )2 2
2 3 5
2
a x y x a a
x a a y x x a y y a
+ − − − =
− + + = − + +
{ } ( ) ( )
{ } { }
5 8 5 117 ,0 S ,2 2 7 2 7
7 , S ; 0 , sistema indeterminato2
a a a aa
a a
a a
+ − ∈ − − = + + ∈ − = ∅ ∈
R ,

275
86) ( )
( )1 1
1 1
m x my m
mx m y m
− + = −
+ − = −
{ } ( ){ }
{ }1 S 1,12
1 , sistema indetrminato2
m m m
m
∈ − = − − ∈
R ,
87)
2 1
3 4 1
2 2
x y z
x y z
x y z
− + = − + = − + − =
( ){ }4 3S , , 15 5
= − −
88)
( ) ( )( ) ( )
2 1 3 2 3
2 3 4 2 4
0
x y z y
x y z
x y z
− + − = −
− + = − + − =
( ){ }S 4, 36, 40 = − − −
89)
( ) ( )( ) ( )( ) ( )
21 1
2 4 3 1
1
x x y x y z y y
y x z
x y z
− − − + = + − + = − + − + =
( ){ }14 9S 0, ,5 5
= − −
90)
1 12 3 3
1 12 2
12
yx z
x y z
x y
− ++ = − − =
− =
( ){ }9 1 13S , ,4 4 8
= −
91)
( ) ( ) ( ) ( )2 22 1 3 2 1 1
12 4
2
x y z x z y
x z
y z
+ − − = − − + − =
+ =
( ){ }7S ,13, 112
= − −
92)
2 23 2 22 1
2 13 2 3
x y z y x z
x y z
yx z
+ − +− = − + = − − + =
( ){ }1 3S ,1,2 2
= −
93)
( ) ( )( ) ( ) ( )
21 3 1 3
2 2 3
12 3
x x y x z
y y z y y
yx
+ + − = − +
− + − = − + =
( ){ }16 7 1S , ,15 5 5
=
94)
( ) ( ) ( ) ( )222 1 2
2 114 5 5
2 8
x x y z y x y x x
yx z
x y
+ − + + = + + −
− − − =
− =
( ){ }3S 5, ,92
= −

276
Problemi
95) Determina due numeri sapendo che il rapporto tra il doppio del primo aumentato di 1 e il
triplo del secondo diminuito di 3 è 58
, mentre la somma tra dividendo e divisore è 39.
[ ]7; 9
96) In un numero di due cifre, la differenza tra la cifra delle decine e quella delle unità è 3, mentre
il doppio del numero che si ottiene scambiando la cifra delle decine con quella delle unità,
aumentato di 2, dà il numero dato. [ ]52
97) Tre anni fa, l’età del padre era tripla di quella del figlio; fra dieci anni l’età del padre supererà
di quattro anni il doppio dell’età del figlio. Determina le età di padre e figlio.
[ ]54; 20
98) Determina due numeri naturali sapendo che, dividendo il doppio del consecutivo del numero
maggiore per il numero minore aumentato di 3, si ottiene come quoziente 3 e come resto 4;
inoltre il numero maggiore diminuito di 3 è uguale al doppio del numero minore.
[ ]5; 13
99) Determina due numeri sapendo che il minore supera di 8 i 25
del maggiore e che la differenza fra i 32
del maggiore e i 38
del minore è uguale ai 23
della loro somma.
[ ]20; 16
100) Determina due numeri sapendo che la differenza fra il primo ed il secondo è uguale alla
quarta parte del secondo numero aumentata di 1; inoltre, la differenza fra il triplo del secondo
ed il doppio del primo è uguale alla differenza fra il primo e la metà del secondo aumentata di
10. [ ]36; 28
101) Dividi il numero 20 in due parti in modo tale che la somma dei 34
della parte minore con i 23
della parte maggiore superi di 5 i 34
del numero maggiore. [ ]8; 12
102) Determina due numeri pari consecutivi sapendo che la loro somma è uguale a 170.
[ ]84; 86
103) Determina due numeri dispari consecutivi sapendo che la loro somma è uguale a 76.
[ ]37; 39
104) Determina due numeri sapendo che i 23
del minore aumentato di 4 è uguale ai 43
del
maggiore diminuito di 6 e che il triplo del primo è uguale al doppio del secondo. [ ]8; 12

277
105) Determina due numeri sapendo che sottraendo ad 15
del primo 16
del secondo si ottiene 2,
mentre sottraendo ad 110
del primo 112
del secondo si ottiene 11. [impossibile]
106) Determina due numeri sapendo che sottraendo ad 13
del primo 15
del secondo si ottiene 2 e
che il quintuplo del primo è uguale triplo del secondo aumentato di 10. [indeterminato]
107) Determina i coefficienti a e b del polinomio ( ) 2P 2x ax bx= + + sapendo che esso è divisibile
per ( )1x− e che la somma fra il triplo di a e il doppio di b è uguale a 1.
[ ]5;a b= = −7
108) Il perimetro di un rettangolo misura 60cm; la base supera l’altezza di 8cm. Determina l’area
del rettangolo. [209 cm2]
109) Il perimetro di un rettangolo misura 36 cm; se si tolgono 4 cm al lato maggiore e si triplica il
lato minore si ottiene un altro rettangolo di perimetro 44 cm. Determina l’area dei due
rettangoli. [56 cm2; 120 cm2]
110) La somma delle diagonali di un rombo misura 34 cm; la somma dei 38
della diagonale
maggiore con i 35
della diagonale minore misura 15cm. Determina il perimetro, l’area del
rombo ed il raggio della circonferenza inscritta nel rombo. [120 cm2; 52 cm; 4,6 cm]
111) Quante sono le terne ordinate e distinte ( ), ,x y z formate da interi positivi tali che
2 22 9x xy y z+ + − =
a) nessuna; b) due; c) tre d) quattro; e) più di sei.
[Olimpiadi Matematica, Giochi di Archimede 2008]
112) In un rettangolo di area 150 m2 la misura della base è uguale ai 32
di quella dell’altezza.
Quanto misura il perimetro del rettangolo?
a) 50 m; b) 54 m; c) 60 m; d) 64 m; e) 70 m.
[Olimpiadi Matematica, Giochi di Archimede 2006]
113) Se 2y x= e 2z y= , a cosa è uguale x y z+ + ?
a) 5x; b) 4y; c) 3z; d) 72
y e) 73
z.
[Olimpiadi Matematica, 2002]

















