Appunti del corso di Introduzione alla Relatività Generale Raccolti da Carlo Mascaretti Prof. Dietmar Klemm Dipartimento di Fisica, Università degli Studi di Milano Anno Accademico 2012-2013
Transcript
Appunti del corso diIntroduzione alla Relatività Generale
Raccolti da
Carlo Mascaretti
Prof. Dietmar KlemmDipartimento di Fisica, Università degli Studi di Milano
La relatività generale è la più grande prestazione del pensieroumano sulla natura; è una notevole combinazione di profondità
filosofica, intuizione fisica ed ingegnosità matematica.La ammiro come un’opera d’arte.
Max Born
Parlerò sinceramente: anche iosarei potuto arrivare alla relatività ristretta,
ma come Einstein abbia tirato fuori quella generalemi rimane totalmente incomprensibile.
Affanculo, sono Feynman e la posso tirarfuori quando voglio, la relatività generale!
Richard Feynman
Circa dal ’97 sappiamodi non sapere nulla.
Dietmar Klemm
-Qualcuno conosce qualche esperimentodi rivelazione di onde gravitazionali?
-Sì, uno dell’INFN.-Dove?
-A Pisa.-Bravi, come si chiama?
-Virgo.-Ah bene. E sapete perchè si chiama così?
-...-Perchè non vedrà mai un cazzo!
Dietmar Klemm
Dedico queste pagine a tutti i miei compagni di corso, in particolar modo a Baso, Beppe, bl4ckst0ne,Brescia, Ghera, Penny e Tommy, senza i quali questi appunti non sarebbero esistiti nella forma presente.
Il curatoreCarlo Mascaretti
Quest’opera è stata rilasciata con licenza Creative Commons Attribuzione - Condividi allo stessomodo 3.0 Italia. Per leggere una copia della licenza visita il sito web o spedisci una lettera a CreativeCommons, 171 Second Street, Suite 300, San Francisco, California, 94105, USA.
Le immagini sono state realizzate con Inkscape 0.48.Realizzato con LATEX.
versione aggiornata al 17 settembre 2013 (completa – v3.14159)
Dai tempi di Galileo e di Newton sappiamo che tutti i corpi cadono con la stessa accelerazione, indi-pendentemente dalla loro massa. Questo fatto va sotto il nome di principio di equivalenza debole:la massa inerziale e la massa gravitazionale di qualsiasi oggetto sono uguali. Ma cosa sono la massainerziale e quella gravitazionale? Dalla seconda legge di Newton abbiamo
F = mia (1.0.1)
dove mi è la massa inerziale: tale equazione ci dice che la massa inerziale ha a che fare con la resistenzache sentiamo quando spingiamo un oggetto. La legge di gravitazione invece asserisce
F = −mg∇φ (1.0.2)
dove mg è la massa gravitazionale, che contribuisce alla generazione della forza, e φ è il potenzialegravitazionale. Unendo le equazioni (1.0.1), (1.0.2) otteniamo
a = −mg
mi∇φ = −∇φ
che ci dice che tutti i corpi subiscono la stessa accelerazione. L’esperimento di Eötvös, effettuato con unabilancia di torsione, diede come risultato
∣∣∣∣mg
mi− 1
∣∣∣∣ . 10−14
Risulta dunque immediato chiedersi perchè vale mi = mg, la teoria newtoniana funzionerebbe infattiugualmente bene, se non fosse così; c’è un motivo più profondo?
Riformuliamo il principio di equivalenza debole in una forma leggermente diversa: consideriamo un os-servatore in una scatola chiusa, isolata e sufficientemente piccola, così da non poter vedere il mondoesterno. Supponiamo che questo osservatore faccia degli esperimenti studiando il moto di particelle test,ad esempio per misurare il campo gravitazionale locale: egli otterrebbe dei risultati diversi se la scatolasi trovasse sulla Luna o su Giove, anzichè sulla Terra. La risposta a tali esperimenti sarebbe diversaanche se la scatola accelerasse in modo uniforme, in quanto cambierebbe l’accelerazione delle particelle incaduta libera rispetto alla scatola. Il principio di equivalenza debole implica che non c’è nessun modo diseparare gli effetti di un campo gravitazionale da quelli causati da un’accelerazione costante, osservandodelle particelle in caduta libera1. Il fatto che la scatola sia piccola serve ad approssimare il valore di ∇φcostante in tutta la scatola, ed il fatto che le particelle siano test permette di trascurare le interazionigravitazionali tra di esse.
1è possibile invece distinguere fra accelerazione costante e campo elettromagnetico osservando il comportamento diparticelle con cariche diverse.
6 Capitolo 1. Introduzione e motivazione
Figura 1.1: la scatola troppo grande svela l’origine gravitazionale dell’accelerazione.
La generalizzazione di Einstein del principio di equivalenza afferma invece che per il fisico nella scatola nonc’è nessun modo di disinguere tra accelerazione uniforme e campo gravitazionale, qualsiasi esperimentofaccia (quindi non solo buttando delle particelle). Ciò implica che nella scatola le leggi della fisica siriducono a quelle della relatività ristretta: è impossibile rivelare l’esistenza di un campo gravitazionale,e questo fatto va sotto il nome di principio di equivalenza di Einstein. Risulta impossibile definireunivocamente l’accelerazione come causata dalla gravità: ha più senso definire “non accelerato” come “incaduta libera”, promuovendo1 così ad inerziale un qualunque sistema in caduta libera. Da questo passoconsegue che la gravità non è una forza: forza implica accelerazione e la nostra definizione diaccelerazione nulla è muoversi liberamente in un qualsiasi campo gravitazionale. L’idea chegiace alla base di tale definizione è che la gravità è una manifestazione della curvatura2 dello spaziotempo.
1si può anche dire che localmente possiamo trasformare “via la gravità”, vedremo più tardi cosa ciò significhi in terminidi geometria differenziale.
2in uno spaziotempo curvo le particelle si muovono lungo delle geodetiche, curve che definiremo più tardi; in questo modola coincidenza di massa inerziale e di massa gravitazionale è automaticamente assunta fin dall’inizio, e non è più un caso.
Capitolo 2
Parentesi matematica: geometriadifferenziale
2.1 Varietà differenziabiliIl concetto di varietà generalizza quello di una superficie in R3 (o di un’ipersuperficie in Rn). Una varietàviene però definita senza usare un’immersione in Rn, e generalizza invece l’idea di una rappresentazioneparametrica di una superficie, ovvero di una mappa ϕ omeomorfa1 da un insieme aperto Ω alla superficienel piano R2. Vogliamo generalizzare la rappresentazione parametrica (o carta o sistema di coordinate):l’idea è di avere una superficie coperta dai domini delle carte in un modo tale che nell’intersezione tra duedomini i due insiemi di coordinate siano legati tra loro in maniera continua. Una varietà differenziabilegeneralizza il concetto di superficie differenziabile in R3, cioè di una superficie con un piano tangentedefinito in ogni punto di essa.
Definizione 2.1. Sia X un insieme: si definisce topologia su X una collezione F di sottoinsiemi di Xtali che:
• X e ∅ appartengono ad F ;
• l’unione numerabile di elementi di F appartiene ad F ;
• l’intersezione di un numero finito di elementi di F appartiene ad F .
Gli elementi di F si dicono aperti nella topologia F .
Definizione 2.2. Uno spazio topologico è una coppia (T,X) dove T è una topologia su X.
Definizione 2.3. Una varietà (o manifold) è uno spazio topologico di Hausdorff (cioè tale che per duepunti distinti si possono sempre trovare degli intorni disgiunti) tale che ogni punto della varietà possiedeun intorno omeomorfo ad Rn, ed in tal caso la varietà si dice n-dimensionale.
Definizione 2.4. Una carta di una varietà X è una coppia (U,ϕ) dove U ⊆ X è aperto e viene dettodominio della carta, e ϕ : U → V è un omeomorfismo, con V insieme aperto in Rn.
Le coordinate(x1, x2, . . . , xn
)dell’immagine ϕ(x) ∈ Rn del punto x ∈ U ⊆ X vengono dette coordinate
di x nella carta (U,ϕ).
Definizione 2.5. Un atlante di classe C k su di una varietà X è un insieme (Uα, ϕα) di carte taliche:
• ⋃αUα = X;
1tale per cui esista ϕ−1 e siano continue sia ϕ che ϕ−1.
• le ϕα siano tali che le mappe ϕβ ϕ−1α : ϕα(Uα ∩Uβ)→ ϕβ(Uα ∩Uβ) sono di classe C k (condizione
di compatibilità).
Figura 2.1: rappresentazione di una carta.
In altre parole, se xi e yi sono rispettivamente le coordinate di x nelle carte (Uα, ϕα) e (Uβ , ϕβ), la mappaϕβ ϕ−1
α è data da n funzioni f j ∈ C k(ϕα(Uα ∩ Uβ)) di n variabili tali che
xi 7→ yj = f j(xi)
Figura 2.2: rappresentazione di un atlante.
La condizione di compatibilità, se soddisfatta, caratterizza le varietà differenziabili k volte. Convarietà differenziabile di solito si intende una varietà C k con k sufficientemente grande per un datocontesto (spesso si intende k → +∞).
Ecco due esempi per comprendere meglio quanto appena affrontato:
1. il cono doppio, ovvero l’insieme
(x1, x2, x3) ∈ R3 :(x1)2 −
(x2)2 −
(x3)2
= 0
munito della topologia indotta da quella usuale in R3 è una varietà? No, perchè l’origine non ha unintorno omeomorfo ad R2; tuttavia il semicono
(x1, x2, x3) ∈ R3 :
(x1)2 −
(x2)2 −
(x3)2
= 0, x1 ≥ 0
è una varieta di classe C 0.
2.1. Varietà differenziabili 9
Figura 2.3: il cono doppio ed il semicono.
2. Consideriamo la sfera in R3
S2 :(ξ1, ξ2, ξ3
)∈ R3 :
(ξ1)2
+(ξ2)2
+(ξ3)2
= r2
per fissato r > 0: possiamo costruire una carta usando la proiezione stereografica dal polo nord,identificato dalle coordinate N = (0, 0, r), nel modo illustrato in figura:
Figura 2.4: proiezione stereografica a partire dal polo nord.
Per ogni punto x =(ξ1, ξ2, ξ3
)appartenente alla sfera si traccia la congiungente il polo nord, che
intersecherà il piano(ξ1, ξ2
)in un punto di coordinate
(ξ
1, ξ
2, 0), per cui si ottiene in modo univoco
un punto in R2 caratterizzato dalle coordinate(x1, x2
)dove x1 = ξ
1e x2 = ξ
2. Risulta perciò ben
definita una funzione ϕ1 : U1 ⊆ S2 → V1 ⊆ R2 tale che(ξ1, ξ2, ξ3
)7→(x1, x2
)= ϕ1
(ξ1, ξ2, ξ3
)
Determinare il punto(x1, x2
)individuato dalla retta in R3 passante per il polo nord e per il punto
La generica retta in R3 passante per i punti P =(a1, a2, a3
)e Q =
(b1, b2, b3
)è il luogo dei punti(
x1, x2, x3)soddisfacenti
x1 − a1
b1 − a1=x2 − a2
b2 − a2=x3 − a3
b3 − a3
Imponendo P ≡ N , ovvero(a1, a2, a3
)= (0, 0, r), e Q ≡ x, ovvero
(b1, b2, b3
)=(ξ1, ξ2, ξ3
)si ottiene
x1
ξ1=x2
ξ2=x3 − rξ3 − r
Seguendo la costruzione stereografica imponiamo x3 = 0: si giunge così a
x1
ξ1=x2
ξ2= − r
ξ3 − r =⇒ ϕ1 :
x1 =rξ1
r − ξ3
x2 =rξ2
r − ξ3
Si nota perciò che la carta così costruita copre tutta la sfera tranne il polo nord, che viene mappatonell’∞: ciò implica che per coprire tutta la sfera ci vogliono almeno due carte, e possiamo sceglierela seconda, per esempio, prendendo la proiezione stereografica dal polo sud.
Esercizio 2.1. Considerando S2 e ϕ1 definite come sopra, sia ϕ2 la carta ottenuta dalla proiezionestereografica dal polo sud e siano U1 ed U2 gli insiemi
U1 = S2 \ (0, 0, r) U2 = S2 \ (0, 0,−r)Si determini esplicitamente la mappa ϕ2 ϕ−1
1 : ϕ1(U1 ∩ U2)→ ϕ2(U1 ∩ U2).
La proiezione stereografica dal polo sud si ottiene immediatamente da quella ottenuta dal polo nordsostituendo −r ad r, ottenendo così
ϕ1 :
x1 =rξ1
r − ξ3
x2 =rξ2
r − ξ3
ϕ2 :
x1 =rξ1
r + ξ3
x2 =rξ2
r + ξ3
A questo punto si osserva chex1
x2=ξ1
ξ2=x1
x2
e che(x1)2
+(x2)2
=r2
(r − ξ3)2
[(ξ1)2
+(ξ2)2]
︸ ︷︷ ︸r2−(ξ3)2
= r2 r + ξ3
r − ξ3
Varrà una relazione simmetrica per le xi:
(x1)2
+(x2)2
= r2 r − ξ3
r + ξ3
Sfruttando il fatto che
x2 = x1x2
x1
r − ξ3
r + ξ3=
r2
(x1)2
+(x2)2
possiamo scrivere
(x1)2[
1 +
(x2
x1
)2]
=r4
(x1)2
+(x2)2 =⇒
x1 =r2x1
(x1)2
+(x2)2
x2 =r2x2
(x1)2
+(x2)2
Possiamo concludere dunque che le xi sono funzioni differenziabili delle xj eccetto in(x1, x2
)= (0, 0), che
però non appartiene a ϕ1(U1 ∩ U2) = R2 \ (0, 0): S2 è dunque una varietà differenziabile.
2.1. Varietà differenziabili 11
Le carte permettono di definire la differenziabilità di una funzione definita su di una varietà. Conside-riamo f : X → R e sia (U,ϕ) una carta in x ∈ U ⊆ X: allora la funzione f ϕ−1 è una mappa
f ϕ−1 : ϕ(U)→ R
Figura 2.5: rappresentazione di una funzione reale definita sulla varietà X.
Nello stesso modo in cui le coordinate di ϕ(x) rappresentano x nella carta locale(U,ϕ), la mappa f ϕ−1
rappresenta f nella carta locale.
Definizione 2.6. La funzione f : X → R è differenziabile in x ∈ X se, in una carta (U,ϕ) in x ∈ Ucon U ⊆ X, la funzione f ϕ−1 è differenziabile in ϕ(x).
A questo punto ci si potrebbe domandare se la differenziabilità di f dipenda dalla carta scelta: la rispostaè no, in quanto se f ϕ−1 è differenziabile in ϕ(x) per una carta (U,ϕ) allora f ϕ−1 è differenziabile inϕ(x) per ogni carta (U , ϕ) in x, perchè
f ϕ−1 =(f ϕ−1
)(ϕ ϕ−1
)
dove f ϕ−1 è differenziabile per ipotesi e ϕ ϕ−1 è differenziabile per la condizione di compatibilità: neconsegue quindi che f ϕ−1 è differenziabile. Lo spazio delle funzioni differenziabili su X viene indicatocon F(X).
A volte è conveniente scrivere alcune espressioni più esplicitamente, come segue: sia ai : Rn → R tale che
ai(u) = ui u ∈ Rn
Allora ai ϕ(x) = xi: definiamo perciò ϕi : X → R come ϕi = ai ϕ. La rappresentazione locale di ϕisarà
ϕi ϕ−1 = ai ϕ ϕ−1 = ai
Possiamo ora chiederci quando due varietà differenziabili sono equivalenti; siano Xn ed Y p due varietàdifferenziabili di dimensione rispettivamente n e p, e sia f : Xn → Y p. La funzione ψf ϕ−1 rappresentaf nelle carte locali (U,ϕ), (W,ψ) di Xn ed Y p: f è differenziabile in x ∈ U se la funzione ψ f ϕ−1
è differenziabile in ϕ(x). In altre parole, f è differenziabile in x se le coordinate yα = fα(xi)di y sono
funzioni differenziabili delle coordinate xi di x.
Definizione 2.7. Una funzione f è detta diffeomorfismo se f è bijettiva ed f, f−1 sono differenziabili.
I diffeomorfismi stanno alle varietà differenziabili come gli omeomorfismi stanno agli spazi topologici, ecome gli isomorfismi stanno agli spazi vettoriali.
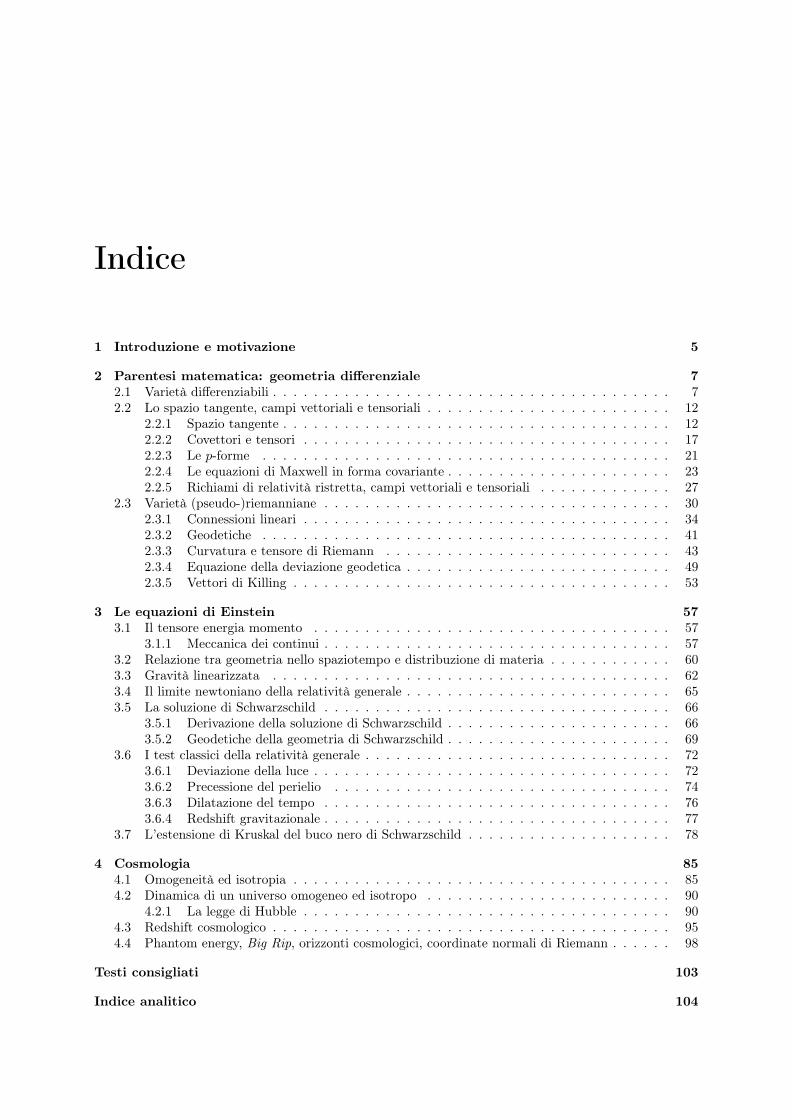
Figura 2.6: rappresentazione della situazione descritta.
2.2 Lo spazio tangente, campi vettoriali e tensoriali
2.2.1 Spazio tangenteLo spazio tangente ad una varietà X in un punto x ∈ X, indicato con Tx(X), viene usato per definiredelle proprietà differenziali di oggetti in un intorno di x, indipendentemente dalle coordinate locali. Tx(X)approssima X localmente in x; molte approssimazioni in fisica consistono nel sostituire localmente unavarietà col suo piano tangente in un suo punto (e si parla di linearizzazione locale). Dimostreremo piùavanti che
dimX = n =⇒ Tx(X) ∼= Rn
dove il simbolo ∼= sta per “isomorfo a”.
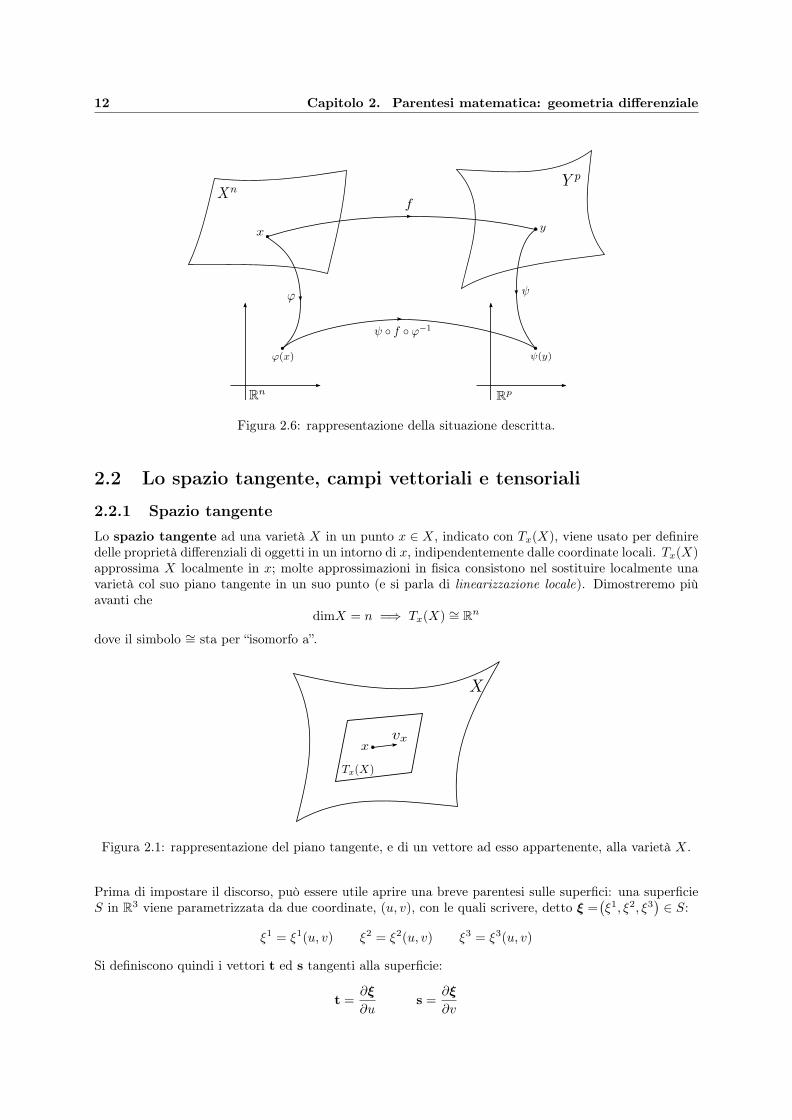
Figura 2.1: rappresentazione del piano tangente, e di un vettore ad esso appartenente, alla varietà X.
Prima di impostare il discorso, può essere utile aprire una breve parentesi sulle superfici: una superficieS in R3 viene parametrizzata da due coordinate, (u, v), con le quali scrivere, detto ξ =
(ξ1, ξ2, ξ3
)∈ S:
ξ1 = ξ1(u, v) ξ2 = ξ2(u, v) ξ3 = ξ3(u, v)
Si definiscono quindi i vettori t ed s tangenti alla superficie:
t =∂ξ
∂us =
∂ξ
∂v
2.2. Lo spazio tangente, campi vettoriali e tensoriali 13
che generano il piano tangente in un punto, ed il vettore normale alla superficie n:
n = t× s
Figura 2.2: rappresentazione di una superficie in R3.
Esistono tre definizioni equivalenti di vettore tangente in un punto.
Definizione 2.8. Un vettore tangente vx in un punto x ∈ X è un’applicazione lineare dallo spaziodelle funzioni differenziabili f : U → R, dove U è un intorno di x, in R che soddisfi:
i) la linearità, per cui, dati α, β ∈ R ed f, g funzioni, vale:
vx(αf + βg) = αvx(f) + βvx(g)
ii) la regola di Leibniz:vx(fg) = f(x)vx(g) + g(x)vx(f)
Osservazione 2.1. Si noti che le condizioni i) e ii) implicano che, data f = α ∈ R, vx(α) = 0: bastainfatti porre f = g = 1 nella ii), per cui si ottiene che vx(1) = 0, e quindi usare f = 1 e β = 0 nella i), dacui vx(α) = αvx(1) = 0.
Osservazione 2.2. Una mappa lineare che soddisfi la regola di Leibniz viene chiamata derivazione.
Lo spazio Tx(X) dei vettori tangenti in x, dotato di addizione e moltiplicazione per scalare definite da
(αux + βvx)(f) = αux(f) + βvx(f)
è uno spazio vettoriale, chiamato spazio vettoriale tangente.
Osservazione 2.3. La definizione di un vettore tangente come mappa su funzioni non richiede un’im-mersione della varietà in qualche spazio.
Vediamo ora come definire le componenti di un vettore tangente; siano f una funzione differenziabile inun intorno di x0 ∈ X, (U,ϕ) una carta locale tale che x0 ∈ U ed f = f ϕ−1 una funzione f : ϕ(U)→ R.Per il teorema del valore medio (o di Lagrange), si ha che, per un qualche s ∈ (0, 1):
dove è sottointesa la somma sull’indice ripetuto i. Si ha ora che xi = ϕi(x), ricordando la precedentedefinizione di ϕi, così come xi0 = ϕi(x0), per cui
f(x) = f(ϕ(x0)) +(ϕi(x)− ϕi(x0)
) ∂f
∂xi
∣∣∣∣ϕ(x0)+s[ϕ(x)−ϕ(x0)]
(2.2.1)
Definendo le quantità α, gi e βi come
α = f(ϕ(x0)) gi(x) =∂f
∂xi
∣∣∣∣ϕ(x0)+s[ϕ(x)−ϕ(x0)]
βi = ϕi(x0)
la (2.2.1) diventaf = α+ gi
(ϕi − βi
)
Applicando ad f il vettore tangente in x0 si ottiene
vx0(f) =vx0
(α) + vx0(gi)(ϕi(x0)− βi
)+ gi(x0)
[vx0
(ϕi)−vx0
(βi)]
= gi(x0)vx0
(ϕi)
avendo usato le proprietà del vettore tangente: si ottiene perciò
vx0(f) = vi∂f
∂xi
∣∣∣∣ϕ(x0)
(2.2.2)
Cioè per il rappresentativo di vx in coordinate locali possiamo scrivere
vx(f) = vi∂
∂xif(x) = vi∂if(x)
assumendo1 vi come componenti di vx e ∂i come vettori di base dello spazio tangente.
Esercizio 2.2. Si dimostri che i vettori ∂ini=1 formano una base nello spazio tangente.
Per dimostrare che un set di vettori è una base, bisogna mostrare che essi sono indipendenti linearmentee formano un set completo: quest’ultima proprietà è stata appena dimostrata, infatti abbiamo appenascritto il generico vettore tangente nella (2.2.2). Rimane da dimostrarne dunque l’indipendenza: sia
vx(f) = vi∂f
∂xi
∣∣∣∣ϕ(x)
= 0 ∀f
Basta scegliere f = ϕj per ottenere vj = vx(ϕj)
= 0 ∀j.
Definizione 2.9. Un vettore tangente vx è una tripla (x, ϕ, v), dove ϕ è una carta, in modo tale che(x, ϕ, v) e (x, ϕ′, v′) rappresentano lo stesso vettore se v′ si può ottenere da v come
v′ = D(ϕ′ ϕ−1
)∣∣xv (2.2.3)
dove D(ϕ′ ϕ−1
)∣∣xè la Jacobiana, ovvero la matrice J di componenti
Jji(ϕ(x)) =∂x′j
∂xi
∣∣∣∣∣ϕ(x)
Esercizio 2.3. Si verifichi che vx dato dalla (2.2.2) soddisfa la (2.2.3).
vi∂
∂xi= vi
∂x′j
∂xi∂
∂x′j= v′
j ∂
∂x′j=⇒ v′
j=∂x′j
∂xivi
1anche qua si adotta la convenzione di Einstein, per cui è implicita la somma su di un indice ripetuto una volta in bassoed una in alto (“saturato”)
2.2. Lo spazio tangente, campi vettoriali e tensoriali 15
Osservazione 2.4. La definizione 2.9 è la vecchia definizione che conosciamo: un oggetto è un vettorese controvaria, ovvero se si comporta come indicato da essa.
Figura 2.3: rappresentazione della situazione descritta nella definizione 2.9.
La terza definizione di vettore è in termini di classi d’equivalenza di curve differenziabili in X che passanoper x: una curva Γ in X è una mappa da I ⊆ X in X tale che
I 3 t 7→ Γ(t) ∈ X
Sia Γ una curva differenziabile, ovvero una mappa differenziabile da I inX, con Γ(0) = x0, e sia f : X → Rdifferenziabile in x0; la mappa f Γ è una funzione definita su I a valori reali e differenziabile in t = 0.
Figura 2.4: rappresentazione della terza definizione.
Il vettore tangente alla curva Γ in x0 è una mappa f 7→ vΓx0
(f) dallo spazio delle funzioni differenziabiliin x0 ad R, la cui azione è definita da
vΓx0
(f) : =
[d
dt(f Γ)
]
t=0
(2.2.4)
vΓx0
(f) viene chiamata derivata di f lungo Γ in x0. Se due curve Γ1 e Γ2 sono tali che
si dice che sono tangenti in x0, o che hanno lo stesso vettore tangente in x0. Viceversa, dato un vettoretangente vx0 , è sempre possibile trovare una curva differenziabile che passi per x0 alla quale vx0 è tangente.È quindi possibile identificare un vettore tangente in x0 con una classe d’equivalenza di curve tangenti inx0.
Figura 2.5: rappresentazione di tre curve (Γ1, Γ2 e Γ3) appartenenti alla stessa classe d’equivalenza.
Questa è la terza definizione di vettore tangente. Quali sono le componenti del vettore vx0 tangentealla curva Γ in x0? Per definizione
vΓx0
(f) =
[d
dt
(f ϕ−1 ϕ Γ
)]
t=0
dove le mappe f ϕ−1 = f : ϕ(U(x0)
)→ R e ϕ Γ: I ⊆ R→ U(x0), dove U(x0) ⊂ X è un intorno di x0,
sono tali che
ϕ Γ: I 3 t 7→(Γ1(t),Γ2(t), . . . ,Γn(t)
)f : ϕ(X) 3
xi7→ f
(xi)
Perciò avremo che
vΓx0
(f) =
[d
dtf(
Γi(t))]
t=0
=∂f
∂xi
∣∣∣∣ϕ(x0)
dΓi
dt
∣∣∣∣t=0
∀f
dove ancora una volta ∂i è l’i-esimo vettore di base e la derivata rispetto a t di Γi, valutata in t = 0, èl’i-esima componente.
Esempio 2.1. Consideriamo ancora una volta la sfera S2, di cui richiamiamo la definizione:
S2 :(ξ1, ξ2, ξ3
)∈ R3 :
(ξ1)2
+(ξ2)2
+(ξ3)2
= r2
Utilizziamo come carta locale le usuali coordinate sferiche:
ϕ :
ξ1 = r sinϑ cosφ
ξ2 = r sinϑ sinφ
ξ3 = r cosϑ
con (ϑ, φ) ∈ [0, π]× [0, 2π)
Consideriamo la curva Γ: [0, 2π)→ S2 definita, nella carta locale ϕ, da
(ϕ Γ) (t) :=(π
2, t)
corrispondente all’equatore della sfera; il vettore tangente in t = 0 ha componenti
vi =dΓi
dt
∣∣∣∣t=0
=⇒v1 = 0
v2 = 1=⇒ v = vi∂i = ∂φ
2.2. Lo spazio tangente, campi vettoriali e tensoriali 17
Figura 2.6: rappresentazione dell’azione di ϕ.
Ad una mappa f : Xn → Y p differenziabile in x possiamo associare una mappa lineare, chiamataDf(x) : Tx(X
n)→ Ty(Yp) che manda Tx(Xn) 3 v 7→ w ∈ Ty(Y n) definita da
w(h) := v(h f) ∀h : Y p → R
dove h è differenziabile in y = f(x) ∈ Y p.
Figura 2.7: rappresentazione della situazione descritta.
Definizione 2.10. La mappa Df(x), indicata anche con fx(x), viene chiamata differenziale di f in x.
2.2.2 Covettori e tensoriDefinizione 2.11. Il duale T ∗x(X) dello spazio tangente Tx(X) è lo spazio delle funzioni lineariwx : Tx(X) → R, tali che vx 7→ wx(vx) ∈ R. T ∗x(X) è di nuovo uno spazio vettoriale, chiamato spaziocotangente; gli elementi di T ∗x sono detti vettori covarianti1 o forme differenziali, mentre glielementi dello spazio tangente Tx sono detti vettori contravarianti2.
Andiamo a costruire una base di T ∗x(X): sia ei base di Tx e chiamiamo vix le componenti del vettorevx nella base ei, per cui
vx = vixei
Risulta naturale definire ϑi come il funzionale tale che ϑi(vx) = vix, per cui, per linearità e per la definizioneappena data della loro azione, varrà che
ϑi(vjxej
)= vjxϑ
i(ej) = vjxδij
1a volte chiamati anche covettori.2la differenza tra i due tipi di entità è il modo in cui si trasformano le loro componenti sotto cambiamento di base.
Chiamiamo dxi la base duale alla base di coordinate ∂i, cioè⟨dxi, ∂j
⟩= δij (2.2.6)
Possiamo dunque scrivere il prodotto scalare tra un vettore dello spazio cotangente wx ed un vettore dellospazio tangente vx come
〈wx, vx〉 =⟨wxiϑ
i, vjxej⟩
= wxivjx
⟨ϑi, ej
⟩= wxiv
ix (2.2.7)
Osservazione 2.5. Le componenti di un vettore covariante hanno l’indice in basso e le componenti diun vettore contravariante l’indice in alto: non bisogna però confondere ϑi con l’i-esima componente diun vettore tangente, in quanto è l’i-esimo vettore della base dello spazio cotangente.
Come prima anticipato, la differenza tra vettori covarianti e contravarianti sta nel modo con cui si tra-sformano le loro componenti sotto cambiamento di base: sia perciò ei → e′i un cambio di base datoda
ei = akie′k (2.2.8)
A questo1 corrisponde un cambiamento di baseϑi→ϑ′iin T ∗x definito da a−1, infatti
vx = viei = v′ke′k
perciò varràv′k = viaki (2.2.9)
Per definizione dei ϑi avremo che
ϑ′k(vx) = v′k = viaki = ϑi(vx)aki ∀vxper cui il cambio di base nello spazio cotangente sarà dato da
ϑ′k = ϑiaki (2.2.10)
Prendendo un vettore wx ∈ T ∗x(X) avremo
wx = wiϑi = w′kϑ
′k = w′kϑiaki
perciò varràwi = akiw
′k (2.2.11)
Esempio 2.2. Sia ei = ∂i la base “naturale” dello spazio tangente: consideriamo il cambiamento dibase indotto dal cambiamento di coordinate
xi7→x′idefinito da
∂i =∂x′j
∂xi∂′j =⇒ aji =
∂x′j
∂xi
dove aji altro non è che la componente generica della matrice Jacobiana. Dalla (2.2.10) segue che
dx′j =∂x′j
∂xidxi
per cui dxi è di fatto il differenziale di xi, come anticipato dalla notazione. Possiamo scrivere ogniwx ∈ T ∗x(X) nella cobase naturale
dxicome
wx = widxi (2.2.12)
che giustifica il nome di “1-forma” e di “forma differenziale” dato agli elementi dello spazio cotangente.1gli elementi aki appartengono ad una matrice a.
2.2. Lo spazio tangente, campi vettoriali e tensoriali 19
Osservazione 2.6. La (2.2.12) non implica necessariamente che wx = df per qualche funzione f ; wxnon è necessariamente un differenziale esatto.
Definizione 2.12. Un tensore del tipo (r, s) è una mappa T multilineare
T : V ∗ × . . .× V ∗︸ ︷︷ ︸r volte
×V × . . .× V︸ ︷︷ ︸s volte
→ R
dove V è uno spazio vettoriale e V ∗ è il suo duale.
Per noi V = Tx(X), V ∗ = T ∗x(X); i tensori del tipo (r, s) formano uno spazio vettoriale V rs , la cui base èdata da
ej1 ⊗ . . .⊗ ejr︸ ︷︷ ︸basi di V
⊗ϑi1 ⊗ . . .⊗ ϑis︸ ︷︷ ︸basi di V ∗
(2.2.13)
dove ⊗ denota il prodotto tensoriale. Un tensore può essere sviluppato in componenti come
T = T j1...jri1...is ej1 ⊗ . . .⊗ ejr ⊗ ϑi1 ⊗ . . .⊗ ϑis (2.2.14)
e viene detto r volte contravariante ed s volte covariante.
Definizione 2.13. Dati V , W spazi vettoriali su campo K, il prodotto tensoriale V ⊗W è uno spaziovettoriale formato dalle somme finite formali
v1 ⊗ w1 + v2 ⊗ w2 + . . . vi ∈ V, wi ∈W ∀i
con le regole, detto c ∈ K:
i) (v1 + v2)⊗ w = v1 ⊗ w + v2 ⊗ w;
ii) v ⊗(w1 + w2) = v ⊗ w1 + v ⊗ w2;
iii) (cv)⊗ w = v ⊗ (cw) = c(v ⊗ w).
Esempio 2.3. Siano V = Cn, W = Cm: allora
V 3 v =
a1
a2
...an
W 3 w =
b1b2...bm
Cn+m ⊇ V ×W 3 (v, w)
Si può rappresentare il prodotto tensoriale tra V e W con
V ⊗W =
a1
...an
⊗
b1...bm
=
a1
b1...bm
...
an
b1...bm
=
a1b1...
a1bm...
anb1...
anbm
∼=
a1b1 a1b2 . . . a1bma2b1 a2b2 . . . a2bm...
.... . .
...anb1 anb2 . . . anbm
Verificare come esercizio che tale rappresentazione soddisfa le proprietà i), ii), iii) richieste dalla definizio-ne. Per n = m = 2, v e w possono rappresentare delle particelle di spin 1/2; v ⊗ w descriverebbe quindiil sistema formato dalle due particelle.
Più formalmente, V ×W è l’insieme delle coppie ordinate (v, w) dove v ∈ V e w ∈W ; lo spazio vettorialelibero F su V ×W è lo spazio in cui gli elementi di V ×W costituiscono una base, ovvero
F(V ×W ) =
n∑
i=1
αi(vi, wi), αi ∈ K, n ∈ N,(vi, wi) ∈ V ×W ∀i
Il prodotto tensoriale viene definito, a partire da questo, tramite la relazione di equivalenza per cui, dativ, v1, v2 ∈ V , w, w1, w2 ∈W e c ∈ K qualsiasi:
(v1 + v2, w) ∼(v1, w) +(v2, w)
(v, w1 + w2) ∼(v, w1) +(v, w2)
(cv, w) ∼(v, cw) ∼ c(v, w)
In tal caso V ⊗W := F (V ×W )/∼ . Notiamo invece che V ⊕W = V ×W dotato della struttura vettoriale
Per definizione un tensore prende come argomenti r funzioni lineari ed s vettori; posso scrivere l’azionesulla base scelta come
T( ∈V ∗︷ ︸︸ ︷u(1), . . . , u(r),
∈V︷ ︸︸ ︷v(1), . . . , v(s)
)= T j1...jri1...is ej1 ⊗ . . .⊗ ϑ
is(u(1), . . . , v(s)
)
def= T j1...jri1...is ej1
(u(1)
). . . ejr
(u(r)
)ϑi1(v(1)
). . . ϑis
(v(s)
)
= T j1...jri1...is u(1)j1 . . . u(r)jrvi1(1) . . . v
is(s)
Notiamo che ϑik(v(k)
)= vik(k) come da definizione, mentre ejk
(u(k)
)= u(k)jk ; ciò è legato al fatto che V e
V ∗ sono l’uno il duale dell’altro.
Esempio 2.4. Sia T un tensore e sia K = R; allora se
• T : V → R, ovvero T è di tipo (0, 1), si avrà un vettore covariante, od 1-forma, scrivibile comeT = Tiϑ
i;
• T : V ∗ → R, ovvero T è di tipo (1, 0): si avrà un vettore controvariante, scrivibile come T = T iei;
• T : V × V → R, ovvero T è di tipo (0, 2): potremo scrivere T = Tij ϑi ⊗ ϑj . Esempi di tale tipo di
tensore sono il tensore di Faraday Fij ed il tensore energia-momento Tij .
Come trasforma un tensore sotto cambiamento di base? Abbiamo visto che
ei = akie′k ϑ′k = ϑiaki
perciòϑ′k(a−1
)lk
= ϑi aki(a−1
)lk︸ ︷︷ ︸
δli
=⇒ ϑl = ϑ′k(a−1
)lk
Abbiamo scritto inoltre il generico tensore in una base
T = T j1...jri1...is ej1 ⊗ . . .⊗ ejr ⊗ ϑi1 ⊗ . . .⊗ ϑis
possiamo perciò vedere come varia il tensore sotto cambio di base:
T = T j1...jri1...is ak1j1. . . akrjr
(a−1
)i1l1. . .(a−1
)islse′k1 ⊗ . . .⊗ e′kr ⊗ ϑ′l1 ⊗ . . .⊗ ϑ′ls
2.2. Lo spazio tangente, campi vettoriali e tensoriali 21
ma d’altra parte si ha anche
T = T k1...krl1...ls e′k1 ⊗ . . .⊗ e′kr ⊗ ϑ′l1 ⊗ . . .⊗ ϑ′ls
Per cui si ha cheT k1...krl1...ls = T j1...jri1...is a
k1j1. . . akrjr
(a−1
)i1l1. . .(a−1
)isls
(2.2.15)
cioè un tensore “ha bisogno” di una matrice a per ogni indice in alto e della matrice a−1 per ogni indicein basso.
2.2.3 Le p-formeDefinizione 2.14. Una p-forma è un tensore del tipo (0, p) Ti1...ip totalmente antisimmetrico, cioè taleche
Ti1...in−1inin+1...ip = −Ti1...inin−1in+1...ip
Prendiamo come esempio di 2-forma il tensore di Faraday Fij : la proprietà di antisimmetria si traducenel fatto che
Fij = −FjiSviluppiamo tale tensore su di una base:
F = Fijϑi ⊗ ϑj =
1
2Fijϑ
i ⊗ ϑj +1
2Fijϑ
i ⊗ ϑj
ora cambiamo il nome agli indici, scambiando i e j, al secondo addendo1; dopodichè sfruttiamo l’antisim-metria, cioè
F =1
2Fijϑ
i ⊗ ϑj +1
2Fjiϑ
j ⊗ ϑi =1
2Fij(ϑi ⊗ ϑj − ϑj ⊗ ϑi
)
Introduciamo ora la seguente notazione:
ϑi ∧ ϑj := ϑi ⊗ ϑj − ϑj ⊗ ϑi
Definizione 2.15. Siano φ ∈ ΛpV , dove
ΛpV :=
T : V × . . .× V︸ ︷︷ ︸
p volte
→ R, T p-forma
e χ ∈ ΛqV : definiamo prodotto esterno tra φ e χ come
φ ∧ χ :=(p+ q)!
p! q!A(φ⊗ χ) (2.2.16)
dove A2 è l’operatore di antisimmetrizzazione, cioè, presa una p-forma T :
(AT )(v1, . . . , vp) :=1
p!
∑
σ∈SpεσT
(vσ(1), . . . , vσ(p)
)(2.2.17)
Esempio 2.5. Sia p = 2, allora
AT(v1, v2) =1
2(+1)T(v1, v2) +
1
2(−1)T(v2, v1)
Osservazione 2.7. φ ∧ χ è un tensore con componenti φi1...ipχj1...jq cioè è una (p+ q)-forma.
1operazione lecita in quanto sono muti.2Sp è il gruppo delle permutazioni di p elementi, ed εσ = 1 se σ è pari, cioè equivale ad un numero pari di scambi, e
Esempio 2.6. Consideriamo il caso particolare di due 1-forme, χ e φ, allora
φ ∧ χ = 2A(φ⊗ χ) = 21
2(φ⊗ χ− χ⊗ φ) = φ⊗ χ− χ⊗ φ
Osservazione 2.8. Una funzione f : X → R, con X varietà differenziabile, è una 0-forma. L’insiemedelle p-forme per tutte le p, dotato del prodotto esterno, forma un’algebra gradata1, chiamata algebraesterna o algebra di Grassmann. Se inoltre dimV = n allora non esistono p forme non banali per p > n:la verifica di questo fatto è banale in quanto una p forma è un tensore Ti1...ip totalmente antisimmetrico,e, se p > n, almeno uno degli indici deve ripetersi una volta, per cui Ti1...ip = 0. In particolare, esisteun’unica forma non banale per n = p, ed è la forma di volume, altrimenti detta determinante.
Costruiamo una base di ΛpV : dataϑibase in V ∗, dimV ∗ = n ≥ p, una base è data daϑI1 ∧ ϑI2 ∧ . . . ∧ ϑIp
dove Ij = 1, . . . , n indicano dei numeri ordinati, ovvero Ij < Ij+1, per cui
dim(ΛpV ) =
(n
p
)
Esempio 2.7. Considerando n = 4 e p = 2, una base dello spazio Λp sarà data daϑ1 ∧ ϑ2, ϑ1 ∧ ϑ3, ϑ1 ∧ ϑ4, ϑ2 ∧ ϑ3, ϑ2 ∧ ϑ4, ϑ3 ∧ ϑ4
Siano φ, χ ∈ Λ1 e ω = φ ∧ χ dove φ = φiϑi e χ = χjϑ
j : allora
ω = φiϑi ∧ χjϑj = φiχjϑ
i ∧ ϑj =1
2(φiχj − φjχi)ϑi ∧ ϑj =: φ[iχj]ϑ
i ∧ ϑj
In generale si può scrivere un tensore T come
Tij = T(ij) + T[ij] =1
2(Tij + Tji) +
1
2(Tij − Tji)
perciò, presi un tensore simmetrico T ed uno antisimmetrico A si ha che
TijAij = −TijAji = −TjiAji = −TijAij = 0
avendo prima usato le proprietà di simmetria dei tensori e poi scambiato il nome degli indici; tale relazionestabilisce che la contrazione tra un oggetto simmetrico ed uno antisimmetrico è 0. Dal conto impostatoin precedenza si ha inoltre che
ωij = φiχj − φjχi in quanto φ ∧ χ = φ⊗ χ− χ⊗ φ
Se ω è una p-forma generica, si può dimostrare che
ω =1
p!ωi1...ipϑ
i1 ∧ . . . ∧ ϑip
1ovvero un’algebra in cui si possono sommare solo le forme con p uguale.
2.2. Lo spazio tangente, campi vettoriali e tensoriali 23
Definizione 2.16. Sia φ ∈ ΛpV una p-forma, per cui, fissata una base di coordinate:
φ =1
p!φi1...ipdxi1 ∧ . . . ∧ dxip
La derivata esterna d : ΛpV → Λp+1V produce da una p-forma φ una (p+ 1)-forma dφ con le seguentiproprietà:
i) d(φ+ χ) = dφ+ dχ;
ii) d(φ ∧ χ) = dφ ∧ χ+ (−1)pφ ∧ dχ, dove χ è una q-forma;
iii) d(dφ) = d2φ = 0;
iv) df = ∂ifdxi se f è una 0-forma.
Vediamo ora una formula esplicita per calcolare dφ:
dφ = d
(1
p!φi1...ipdxi1 ∧ . . . ∧ dxip
)=
1
p!dφi1...ipdxi1 ∧ . . . ∧ dxip +
1
p!φi1...ipd
(dxi1 ∧ . . . ∧ dxip
)
avendo usato la proprietà ii): ma per le proprietà ii), iii) il secondo addendo è nullo, poichè
d(dxi1 ∧ . . . ∧ dxip
)= d2xi1 ∧ . . . ∧ dxip − dxi1 ∧ d
(dxi2 ∧ . . . ∧ dxip
)= −dxi1 ∧ d
(dxi2 ∧ . . . ∧ dxip
)
e così via. Si ha dunque, usando la proprietà iv), che:
dφ =1
p!dφi1...ipdxi1 ∧ . . . ∧ dxip =
1
p!∂jφi1...ipdxj ∧ dxi1 ∧ . . . ∧ dxip
perciò, ponendo ∂jφi1...ip =: φi1...ip,j si ha
dφ =1
p!φi1...ip,jdx
j ∧ dxi1 ∧ . . . ∧ dxip (2.2.18)
2.2.4 Le equazioni di Maxwell in forma covarianteSi definisce il tensore di Faraday F come la 2-forma data da:
F =
0 E1 E2 E3
−E1 0 −B3 B2
−E2 B3 0 −B1
−E3 −B2 B1 0
che unifica i campi elettrico e magnetico: il nostro obiettivo è scrivere le leggi della fisica in modocovariante, ovvero in modo tale da vedere ad occhio come cambiano sotto trasformazioni di Lorentz.
Andiamo a calcolare dF :
dF = d
(1
2Fijdx
i ∧ dxj)
=1
2Fij,kdxk ∧ dxi ∧ dxj
A questo punto si introduce il tensore di Maxwell ∗F , duale del tensore di Faraday, tale che
∗F ij =1
2εijklFkl (2.2.19)
dove εijkl è il simbolo totalmente antisimmetrico1, tale che ε0123 = −1.1detto anche tensore di Levi-Civita.
A partire da ciò, ricaviamo che le equazioni di Maxwell
divB = 0 rotE = −∂B∂t
possono essere scritte in forma covariante come
∂i∗F ij = 0 (2.2.20)
Il fatto che ∗F abbia tale forma è la traduzione matematica della dualità tra B ed E; cominciamo averificare la (2.2.20) a partire dalla componente temporale:
∂i∗F i0 = −∂αBα = −divB
il che ci dice che, imponendo ∂i∗F i0 = 0, la divergenza di B è nulla. Vediamo ora le componenti spaziali:
∂i∗F iα = ∂0
∗F 0α + ∂β∗F βα
ma vale che ∗F βα = −εβαγEγ infatti, ad esempio:∗F 12 = −ε12γEγ = −ε123E3 = −E3 = −E3
dove l’ultima uguaglianza è data dal fatto che la metrica di Minkowski è l’identità per le componentispaziali. Otteniamo perciò
∂i∗F iα = ∂tB
α − ∂βεβαγEγ = ∂tBα − εβαγ∂βEγ = ∂tB
α + εαβγ∂βEγ = ∂tBα + (rotE)α
Perciò abbiamo dimostrato che
∂i∗F ij = 0 =⇒
divB = 0
rotE = −∂tBDalle equazioni (2.2.19) e (2.2.20) segue che
e, usando il trucco di cambiare nome agli indici e poi scambiarli sfruttando l’antisimmetria del tensore diLevi-Civita, si ottiene:
−εijkl∂lFki = −εljki∂iFkl = εijkl∂iFkl
da cui consegue∂[iFkl] = 0 (2.2.21)
La (2.2.21) è una forma alternativa delle equazioni di Maxwell omogenee: riscrivendo dF abbiamo che
dF =1
2Fij,kdxk ∧ dxi ∧ dxj =
1
2∂[iFkl]dx
k ∧ dxi ∧ dxj
avendo sfruttato l’antisimmetria di dxk ∧ dxi ∧ dxj ; secondo la (2.2.21) si ha perciò
dF = 0 (2.2.22)
che contiene le equazioni di Maxwell omogenee: tale relazione prende il nome di identità di Bianchi.1spezzando il tensore ∂iFkl nella somma della sua parte simmetrica ed una antisimmetrica, solo quest’ultima rimane, in
quanto la contrazione tra un tensore simmetrico ed uno totalmente antisimmetrico è nulla.
2.2. Lo spazio tangente, campi vettoriali e tensoriali 25
Osservazione 2.9. La condizione dF = 0 implica che, localmente, F = dA dove A è una 1-forma, cioè
A = Aidxi
dove Ai è il potenziale 4-vettore avente per parte temporale il potenziale scalare ϕ.
F = dA = ∂jAidxj ∧ dxi = ∂[jAi]dx
j ∧ dxi =:1
2Fjidx
j ∧ dxi
per cui si ottieneFji = ∂jAi − ∂iAj (2.2.23)
Esercizio 2.4. Si dimostri che la (2.2.23) è equivalente a
B = rotA E = −∂A∂t− gradϕ
Qual è il legame tra A, ϕ e Ai?
Notiamo che le equazioni di Maxwell rimangono invariate se, fissata una funzione χ regolare, si mandaA 7→ A + gradχ e ϕ 7→ ϕ− ∂tχ, infatti, detto A′ il nuovo 4-vettore potenziale:
F = dA = dA′
Le trasformazioni imposte su A e su ϕ vengono dette trasformazioni di gauge.
Osservazione 2.10. Non è sempre vero che dω = 0 implica che ω = dχ globalmente: basta infatticonsiderare il seguente esempio
ω = − y
x2 + y2dx+
x
x2 + y2dy
Verificato che dω = 0, considerato un cammino Γ =( cosϕ, sinϕ), ϕ ∈ [0, 2π], si ha che∮
Γ
ω = −2π 6= 0
per cui ω non può essere esatta.
Per scrivere le equazioni di Maxwell non omogenee, introduciamo la metrica di Minkowski
η =
−1 0 0 00 1 0 00 0 1 00 0 0 1
con la quale possiamo alzare od abbassare gli indici, nel seguente modo
Scambiando i nomi degli indici in modo opportuno, ovvero scambiando j ed i nel terzo e quarto blocco,essendo ηikηjl 6= 0 ⇐⇒ i = k ∧ j = l, si scrive la variazione dell’azione come
Scambiando i con k ed l con j si cancellano il secondo ed il quarto blocco: consideriamo ora il termine∂iδAj∂kAlη
ikηjl: vorremmo variare Aj e non le sue derivate, perciò si definisce il 4-vettore ausiliario vicome
∂iδAj∂kAlηikηjl = ∂i
(δAj∂kAlη
ikηjl)
︸ ︷︷ ︸vi
−δAj∂i(∂kAlη
ikηjl)
2.2. Lo spazio tangente, campi vettoriali e tensoriali 27
per cui si dimostra che vale il teorema di Gauss anche in 4 dimensioni, ovvero∫
M
d4x ∂ivi =
∮
∂M
d3Si vi
doveM è una varietà, ∂M ne è il bordo e d3Si = dV ni dove ni è normale a ∂M. Tale risultato ci permettedi dire che il primo blocco dà un contributo solo di bordo, dove Aj è fissato, per cui δAj |bordo = 0, il cheimplica vi
∣∣∂M = 0, perciò il termine di bordo è nullo. Rimane solo
δS =
∫d4x
[δAj∂i
(∂kAlη
ikηjl)− δAj∂i
(∂lAkη
ikηjl)− 4πδAjj
j]
=
∫d4x δAj
[∂i(∂kAlη
ikηjl)− ∂i
(∂lAkη
ikηjl)− 4πjj
]
Affinchè tutto quello che è dentro le parentesi sia nullo
ηikηjl∂i(∂kAl − ∂lAk)︸ ︷︷ ︸Fkl
= 4πjj =⇒ ∂iFij = 4πjj
che è equivalente alla (2.2.24).
2.2.5 Richiami di relatività ristretta, campi vettoriali e tensorialiEsiste una generalizzazione relativistica della seconda legge di Newton?
dp
dt= F
Sostituiamo p col quadrivettore pi, t con il tempo proprio τ ed F col quadrivettore forza F i: che conse-guenze ha quest’operazione? Parametrizziamo una linea di mondo della particella usando come parametroil tempo proprio, cioè scriviamo xi = xi(τ), per cui la quadrivelocità ui sarà data da
ui =dxi
dτ=
dt
dτ
dx
dτ
= γ
1
dx
dt
= γ
(1v
)
Notiamo che, essendo γ =(1− v2
)−1/2, vale
uiui = ηijuiuj = −
(u0)2
+(u1)2
+(u2)2
+(u3)2
= γ2(−1 + v2
)= −1
L’impulso è dato dalla massa a riposo (ovvero quella misurata nel sistema di riferimento solidale allaparticella) per quadrivelocità
pi = m0ui =⇒ pipi = −m2
0
Se f i è la forza di Lorentz, vale la relazione
f i =dpi
dτ= −qF ij uj
Verifichiamo che valga tale uguaglianza per gli indici spaziali:
dpα
dτ= −qFα0 u0 − qFαβ uβ = qFα0γ − qFαβγvβ
infatti vale che F ij = ηikF jk , per cui Fα0 = ηk0Fαk , e che vβ = vβ , poichè nelle tre dimensioni spaziali
Si definisce m := γm0 massa dinamica; sviluppando γ per |v| << 1
E = m = m0 +1
2m0v
2 +O(v4)
Definizione 2.17. Un campo vettoriale v su di una varietà X associa ad ogni punto x ∈ X un vettoretangente v0 ∈ Tx(X): x0 7→ v0 = v(x0).
Analogamente si definisce un campo tensoriale. In coordinate locali, un vettore vx è definito dan = dimX componenti, quindi un campo vettoriale v è definito nel dominio di una carta da n funzioni vidi n variabili.
Esempio 2.8. Data S2 parametrizzata da coordinate sferiche (ϑ, φ), il generico campo vettoriale su diessa ha la forma
v = vϑ(ϑ, φ) ∂ϑ + vφ(ϑ, φ) ∂φ
Sia χ(X) l’insieme di tutti i campi vettoriali differenziabili su X, cioè, in coordinate locali, le vi sonofunzioni differenziabili delle xj ; possiamo dare a χ(X) la struttura di algebra di Lie nel seguente modo,dati v, w ∈ χ(X) e f , g ∈ F(X):
i) definendo un’operazione additiva su χ(X):
(v + w)(f) := v(f) + w(f)
ii) definendo un’operazione moltiplicativa tra un campo vettoriale ed una funzione:
(gv) (f) = v(f) · g
In questo modo χ(X) assume la struttura di modulo, e non spazio vettoriale1, sull’anello F(X),che non è un campo perchè in generale f ∈ F(X) non è invertibile;
iii) definendo un’operazione moltiplicativa tra campi vettoriali:
[v, w] := vw − wv (2.2.25)
con tale operazione, detta parentesi di Lie, si intende
[v, w] (f) = v(w(f))− w(v(f))
In coordinate locali, per cui f è la rappresentante di f in una data carta, si ottiene:
[v, w] (f) =(vi∂iw
j − wi∂ivj)∂j f
L’operazione di parentesi di Lie è bilineare, soddisfa la regola di Leibniz e l’identità di Jacobi:
Un modulo su cui sia definita un’operazione bilineare soddisfacente la (2.2.26) e la (2.2.27) viene dettoalgebra di Lie.
1la differenza sta nel fatto che un modulo “pesca” gli scalari in un anello, mentre uno spazio vettoriale in un campo.
2.2. Lo spazio tangente, campi vettoriali e tensoriali 29
Esercizio 2.6. Si dimostri che non possiamo prendere vw come prodotto anzichè la parentesi di Liepoichè vw così definito non è un campo vettoriale: non è soddisfatta la regola di Leibniz
2.3 Varietà (pseudo-)riemannianeDefinizione 2.18. Una varietà (pseudo-)riemanniana è una varietà differenziabile X dotata di uncampo tensoriale g del tipo (0, 2), chiamato tensore metrico e tale che
i) g è simmetrico, ovvero gij = gji;
ii) ∀x ∈ X la forma bilineare è non degenere, ovvero
gx(v, w) = 0 ∀v ∈ Tx =⇒ w = 0
Se gx(v, v) > 0 ∀v ∈ Tx allora si parla di una varietà riemanniana propria, altrimenti si parla di unavarietà pseudo-riemanniana.
Esempio 2.10. Sia X lo spazio di Minkowski e g = η; si danno le seguenti definizioni
η(v, v)
> 0 =⇒ v tipo spazio= 0 =⇒ v tipo luce< 0 =⇒ v tipo tempo
Seϑiè un campo di covettori di base, cioè una base dipendente dal punto della varietà, si definisce
ds2 := g = gijϑi ⊗ ϑj =
1
2gijϑ
i ⊗ ϑj +1
2gjiϑ
j ⊗ ϑi = gij1
2
(ϑi ⊗ ϑj + ϑj ⊗ ϑi
):= gijϑ
iϑj
ϑiϑj prende il nome di prodotto simmetrizzato.
Il tensore g fornisce un prodotto scalare in Tx(X), definito da
(v|w) := gx(v, w) v, w ∈ Tx(X) (2.3.1)
Se ei è la base duale aϑiallora
gx(v, w) = gx(viei, w
jej)
= viwjgx(ei, ej) = gijviwj
avendo sfruttato la multilinearità e la definizione di metrica: si ha dunque che
gx(ei, ej) = gij (2.3.2)
In ogni punto x ∈ X i vettori nulli (o di tipo luce) formano un cono in Tx, detto cono luce, dato da
gijvivj = 0 (2.3.3)
g definisce un isomorfismo canonico tra Tx e T ∗x nel seguente modo: preso u ∈ T ∗x , la mappag(u, ·) : Tx → R è tale che
v 7→ g(u, v) ∈ R
e quindi g(u, ·) ∈ T ∗x . L’isomorfismo canonico è la mappa
Tx → T ∗x : u 7→ g(u, ·) =: u∗
In componenti:g(u, v) = giju
ivj =⇒ u∗j = g(u, ·) = gijui
Useremo lo stesso simbolo u sia per il vettore contravariante u che per il vettore covariante, primaindicato u∗, che è l’immagine del primo secondo l’isomorfismo canonico; useremo inoltre ui per indicarele componenti contravarianti di u e ui per quelle covarianti. Si ha dunque che
ui = gijuj ui = gijuj (2.3.4)
2.3. Varietà (pseudo-)riemanniane 31
dove gij è la matrice inversa di gij , cioè tale che
gijgjk = δik (2.3.5)
In modo analogo, dato un tensore T del tipo (p, 0) possiamo definire
Ti1...ip = gi1j1...ipjpTj1...jp
cioè avremo l’isomorfismo canonico tra⊗p
Tx e⊗p
T ∗x . Oppure possiamo alzare anche solo un indice,dato un tensore T del tipo (0, 2), nel seguente modo
T ij = gikTkj
Si dice che gli indici vengono alzati ed abbassati tramite il tensore metrico g.
Scegliendo la base ei in Tx in modo opportuno, la forma quadratica
gx(v, v) = gijvivj
può essere scritta come somma di k quadrati negativi ed n− k quadrati positivi, ovvero
gx(v, v) = −k∑
i=1
(vi)2
+
n∑
i=k+1
(vi)2
grazie alla simmetricità di g e ad opportuni riscalamenti dei vettori di base. k prende il nome di indicedella forma quadratica: (n− k)− k è invece detto segnatura, ed è pari al numero di autovalori positivimeno il numero di autovalori negativi. In una varietà riemanniana propria k = 0; in una tale varietà labase è ortonormale se(ei|ej) = δij . Se k = 1, si dice che X è lorentziana, e g prende il nome di metricalorentziana, caso di fondamentale interesse in fisica (soprattutto con n = 4). Per le varietà lorentzianeindicheremo con indici latini(i, j) tutte le componenti (perciò i, j = 0, 1, . . . , n−1), e con indici greci(α, β)solo le componenti spaziali (perciò α, β = 1, 2, . . . , n− 1): si avrà perciò che ei è una base ortonormalese
(eα|eβ) = δαβ (e0|e0) = −1 (eα|e0) = 0
ovvero(ei|ej) = ηij (2.3.6)
dove η è la metrica di Minkowski. La baseϑiduale alla base ortonormale ei sarà tale che
g = −ϑ0ϑ0 +
n−1∑
α=1
ϑαϑα (2.3.7)
per cui l’equazione di un cono di luce è, per la (2.3.3), data da
−(v0)2
+
n−1∑
α=1
(vα)2
= 0 (2.3.8)
Sia w ∈ Tx; allora
w2 = gijwiwj
< 0 w di tipo tempo (dentro il cono)= 0 w di tipo luce (sul cono)> 0 w di tipo spazio (fuori dal cono)
Esempi di varietà (pseudo-)riemanniane
• Lo spaziotempo di Minkowski dotato della matrice g = η tale che, fissata una base di coordinate
e le altre componenti di g sono nulle; vale un discorso simile anche per le coordinate cilindriche.
• Consideriamo la 2-sfera S2 di raggio unitario; essa è una sottovarietà di R3, perciò usiamo la metricaindotta dalla (2.3.10) con r = 1, ovvero
ds2 = dϑ2 + sin2ϑdφ2 (2.3.11)
• Lo spaziotempo di Rindler bidimensionale, dotato della metrica
ds2 = −x2dt2 + dx2 x > 0, t ∈ R (2.3.12)
la metrica così definita è manifestamente lorentziana e non ortonormale.
Esercizio 2.8. Si dimostri che lo spaziotempo di Rindler è semplicemente una parte dello spaziotempodi Minkowski.
Consideriamo il seguente cambio di coordinate:T = x sinh t
X = x cosh t=⇒
dT = sinh tdx+ x cosh tdt
dX = cosh tdx+ x sinh tdt
2.3. Varietà (pseudo-)riemanniane 33
sostituendo nella (2.3.12) otteniamo dunque
ds2 = −dT 2 + dX2
Per capire quale parte della metrica di Minkowski abbiamo ottenuto notiamo che
X2 − T 2 = x2 > 0 =⇒ X2 > T 2
essendo x > 0 e cosh t > 0 ∀t dovrà essereX > |T |
Figura 2.2: lo spaziotempo di Rindler; la regione |X| > T è nota come Rindler wedge.
Se x è costante si avranno rami destri di iperboli nel piano (X,T ), in particolare, per x = 0, tali iperbolidegenereranno nelle due rette X = ±T . Un osservatore con linea di mondo x = k, 0 < k ∈ R, si muovecon velocità u = x−1∂t poichè x = k implica che, scritta
u = ut∂t + ux∂x
allora sarà ux = 0 ed inoltre1giju
iuj = −1 =⇒ −x2utut = −1
Affermiamo che tale osservatore ha accelerazione propria costante; inoltre essa tende a ∞ con x → 0,e, per questo motivo, x = 0 viene chiamato orizzonte di accelerazione. Andiamo a calcolare quanto ciservirà per ricavare l’accelerazione:
∂
∂t=∂T
∂t
∂
∂T+∂X
∂t
∂
∂X= x cosh t ∂T + x sinh t ∂X
da cuiuT = cosh t =
1
x
∂T
∂tuX = sinh t =
1
x
∂X
∂t
Andiamo a definire il 2-impulso come pi := mui, per cui
pT = E = muT = m cosh t→ +∞ per t→ +∞Il tempo proprio sarà
dτ2 = −ds2 = dT 2 − dX2 = x2dt2 =⇒ dτ = xdt
1dalla metrica di Minkowski sappiamo che il quadrivettore velocità ha modulo −1.
A questo punto possiamo scrivere l’accelerazione come
ai =dui
dτ=
1
x
dui
dt=⇒ a =
1
x
d
dt
(cosh tsinh t
)=
1
x
(sinh tcosh t
)
il cui modulo è dato da
ηijaiaj = −
(aT)2
+(aX)2
=1
x2
(− sinh2 t+ cosh2 t
)=
1
x2=⇒ a =
1
x
che diverge con x→ 0.
2.3.1 Connessioni lineariL’obiettivo è definire la derivata di un vettore, o, più in generale, di un tensore, lungo una curva C.
Figura 2.3: rappresentazione di due vettori tangenti alla varietà X collegati da una curva C.
Un modo ingenuo di definire la derivata di un vettore v sarebbe
dv
dt= lim
∆t→0
v(t+ ∆t)− v(t)
∆t
ma sorge subito un problema: gli spazi tangenti TpX e TqX sono degli spazi vettoriali diversi, e quindinon c’è un modo di paragonare un vettore in p con uno in q! Notiamo incidentalmente che, in questocontesto, se la curva è data da t 7→ xi(t) in coordinate locali, e se definiamo la derivata del vettore vlungo C come il vettore con componenti
vi,j =∂vi
∂xjdxj
dt
ci sarebbe il problema che vi,j non trasforma come un tensore sotto trasformazione di coordinate, inquanto c’è la derivata della Jacobiana, ovvero una derivata seconda.
Serve dunque una definizione di trasporto parallelo, ovvero trasportare parallelamente il vettore vq lungoC fino a p, e poi paragonare il vettore così ottenuto con vp. Tale concetto è equivalente a quello delladerivata, perchè se sappiamo trasportare un vettore parallelamente lungo una curva possiamo definire laderivata di un campo vettoriale nella direzione della curva. Al contrario, dato il concetto di derivata,possiamo definire che un vettore è trasportato parallelamente se la sua derivata lungo una data curva èzero.
Osservazione 2.11. La definizione di trasporto parallelo richiede più della struttura di varietà differen-ziabile.
2.3. Varietà (pseudo-)riemanniane 35
Definizione 2.19. Una derivata covariante, o connessione fra spazi tangenti TpX e TqX, su unavarietà differenziabile X, è una mappa v 7→ ∇v dai campi vettoriali su X ai campi tensoriali di tipo (1, 1)su X tale che
i) ∇(v + w) = ∇v +∇w;
ii) data f : X → R differenziabile∇(fv) = df ⊗ v + f · ∇v
Il tensore ∇v viene chiamato derivata covariante di v.
Introduciamo ora i coefficienti di connessione Γjki definiti da
∇ei = Γjkiϑk ⊗ ej (2.3.13)
dove ej è un campo di vettori di base eϑkè un campo di covettori di base. Grazie a tali simboli
possiamo scrivere ∇v in componenti come
∇v = ∇(viei
) ii)= dvi ⊗ ei + vi∇ei =
(dvi + vjΓikjϑ
k)⊗ ei
Per scrivere l’ultima uguaglianza sono stati cambiati gli indici e si è usata la (2.3.13): grazie alle equazioni(2.2.8), (2.2.10) possiamo scrivere che
dvi = ∂kvidxk = ek
(vi)ϑk
perciò∇v =
[ek(vi)
+ Γikjvj]ϑk ⊗ ei (2.3.14)
Le componenti del tensore ∇v vengono indicate con ∇kvi oppure con vi;k
∇v = ∇kviϑk ⊗ ei = vi;kϑk ⊗ ei (2.3.15)
con i ∇kvi dati per confronto con la (2.3.14) da
∇kvi = ek(vi)
+ Γikjvj = ∂kv
i + Γikjvj (2.3.16)
avendo fissato una base di coordinate ek = ∂k; nella (2.3.16) possiamo notare la presenza sia del termine∂kv
i, corrispondente alla solita derivazione, che dei coefficienti di connessione Γikj , corrispondenti alladerivata covariante.
Usiamo ora il fatto che∇v è un tensore per trovare la legge di trasformazione dei coefficienti di connessione:cambiamo perciò base, sfruttando le (2.2.8), (2.2.9), (2.2.10):
La parte non tensoriale contiene una derivata seconda, che cancella quella proveniente dal termine ∂kvi;dall’espressione (2.3.17) capiamo che i coefficienti di connessione non sono le componenti di un tensore.Vediamo il caso particolare in cui ∂i e
dxisono basi di coordinate e
x′j = x′j(xi)
=⇒ a ji =∂x′j
∂xi
allora avremo che
Γ′mhl =
∂x′m
∂xiΓikj
∂xk
∂x′h∂xj
∂x′l+∂x′m
∂xi∂
∂x′h
(∂xi
∂x′l
)(2.3.18)
La derivata covariante ∇uv di v nella direzione u è definita da
∇uv :=(∇v) (u) (2.3.19)
ma ∇v = vi;kϑk ⊗ ei, per cui
∇v(u) = vi;k ϑk(u)︸ ︷︷ ︸uk
ei = vi;kukei
Otteniamo così∇v(u) = uk
[ek(vi)
+ Γikjvj]ei (2.3.20)
Figura 2.4: rappresentazione di un vettore tangente alla varietà X lungo una curva C.
Esercizio 2.9. Usando le (2.3.13), (2.3.19), si dimostri che
∇eiek = Γjikej (2.3.21)
Osservazione 2.12. Dalla (2.3.19) consegue che, prese f, g : X → R:
∇fu+gwv = f · ∇uv + g · ∇wv (2.3.22)
Definizione 2.20. Si dice che un vettore v è parallelo lungo una curva C : t 7→ C(t) se
∇uv = 0 con ui =dCi
dt
per tutti i punti su C.
Notiamo che, grazie alla (2.3.16)
∇uv = 0 ⇐⇒ uk[ek(vi)
+ Γikjvj]
= 0
2.3. Varietà (pseudo-)riemanniane 37
che implica, fissata una base di coordinate, che
uk(∂kv
i + Γikjvj)
= 0 (2.3.23)
La (2.3.23) è un sistema di n equazioni differenziali alle derivate parziali del primo ordine in vi; inoltre, sei coefficienti di connessione Γikj sono nulli, cioè se lo spazio è piatto, si ha la solita definizione di derivatadirezionale.
Possiamo estendere la derivata covariante ai tensori di qualsiasi tipo richiedendo, detti t, s tensori del tipo(p, q), f : X → R funzione, che:
1. ∇vf = v(f), che è uguale, fissata una base di coordinate, a vi∂if ;
2. ∇v(t+ s) = ∇vt+∇vs;
3. ∇v(t⊗ s) = ∇vt⊗ s+ t⊗∇vs;
4. ∇v commuti con la contrazione, vedi sotto.
Osservazione 2.13. Se t è un tensore del tipo (p, q), ∇t è un tensore del tipo (p, q + 1) definito da
Usiamo in particolare la proprietà 4. per trovare la derivata covariante di una 1-forma α: la derivatacovariante nella direzione v della contrazione di α⊗ u (quindi di α(u) := αiu
i) è uguale alla contrazionedella derivate covarianti, cioè di ∇vα⊗ u+ α⊗∇vu, ovvero
Dalla formula appena scritta si nota che per ogni indice c’è un termine Γ, e tale termine sarà precedutodal segno + se l’indice è alto o dal − se l’indice è in basso: questa è una “regola” generale utile per svolgeregli esercizi.
Esercizio 2.11. Si dimostri che la formula per le componenti della derivata covariante di un prodotto èidentica alla usuale formula per la derivata di un prodotto.
Notiamo innanzitutto che∇jtikl =(∇t) i
j kl =(∇ej t
)ikl
Consideriamo il prodotto
s⊗ t =(sikei ⊗ ϑk
)⊗ tlϑl = siktlei ⊗ ϑk ⊗ ϑl
ed usiamo la regola di Leibniz:
∇ej(s⊗ t) =(∇ejs
)⊗ t+ s⊗
(∇ej t
)=⇒
[∇ej(s⊗ t)
]ikl
=(∇ejs
)iktl + sik
(∇ej t
)l
ma questo implica che[∇(s⊗ t)] ij kl =(∇s) i
j k tl + sik(∇t)jloppure
∇j(siktl
)= tl∇jsik + sik∇jtl
che è proprio quanto richiesto dall’esercizio.
Data solo la struttura differenziale della varietà, ci sono molte possibili definizioni di derivata covariante,e nessuna è privilegiata rispetto alle altre. Se invece c’è anche una metrica g, esiste una scelta naturaleper la derivata covariante, in quanto essa fornisce una condizione da imporre sul trasporto parallelo; datidue vettori u e w, richiediamo che il loro prodotto scalare g(u,w) rimanga invariato se trasportiamo u ew parallelamente lungo qualsiasi curva, ovvero
∇vg(u,w) = 0 ∀v (2.3.28)
e questo se ∇vu = ∇vw = 0, cioè se u e w sono trasportati parallelamente lungo v. La (2.3.28) si puòriscrivere usando la proprietà di commutazione tra contrazione e derivata covariante, e ciò nel seguentemodo:
In componenti, tale relazione si scrive come ∇igjk = 0, ma questo, per la (2.3.27), è vero se e solo se
ei(gjk)− Γmijgmk − Γmikgjm = 0 (2.3.29)
Nel caso ciò avvenga, si dice che la connessione è metrica, oppure che g è covariantemente costante.
2.3. Varietà (pseudo-)riemanniane 39
Osservazione 2.14. Teorie di gravità in cui ∇g 6= 0, per esempio quella che Weyl1 formulò nel 1918,non sono compatibili con le osservazioni; ad esempio, la frequenza di un orologio dipenderebbe dalla suastoria. Esistono inoltre applicazioni di questi concetti nello studio dei cristalli, dove in generale ∇g 6= 0;in tale contesto, la non metricità corrisponde alla presenza di difetti nei cristalli.
A parte la richiesta della metricità della connessione, abbiamo bisogno di un’altra condizione su ∇, cheviene fornita dalla torsione.
Definizione 2.21. Il tensore della torsione è
T(α, u, v) = α(∇uv −∇vu−[u, v]) (2.3.30)
dove u e v sono vettori ed α è una 1-forma; ne consegue che T è un tensore del tipo (1, 2).
Osservazione 2.15. Il principio di equivalenza implica che esiste un sistema di coordinate tale cheil tensore di torsione è nullo in un certo punto; in quanto tensore, se è 0 in uno specifico sistema dicoordinate, allora è 0 in uno qualsiasi. Ad ogni modo torneremo su questo punto più tardi; si dimostrainoltre che se T 6= 0, particelle con spin diversi cadono diversamente in uno stesso campo gravitazionale.
Se T = 0, allora[u, v] = ∇uv −∇vu
perciò la connessione viene detta simmetrica. Vediamo ora il significato geometrico2 di T : consideriamoa tal proposito due vettori u e v, spiccati inizialmente da uno stesso punto P0, che viene collegato poicon P2 e P1 rispettivamente da due curve C1 e C2, tangenti a v(P0) e u(P0) nell’ordine, di lunghezzarispettiva η ed ε, con ε, η entrambi infinitesimi. Si trasportano parallelamente poi u lungo C1 e v lungoC2 fino ai punti P1 e P2, dopodichè si tracciano da essi altre due curve, tangenti al vettore spiccato dalpunto di partenza e di lunghezza sempre η ed ε: ciò che avviene quando la torsione non è nulla è che nonsi può costruire in questo modo un “parallelogramma” che si chiuda. Formalmente:
Figura 2.5: la torsione nonnulla impedisce la chiusura del “parallelogramma”.
1egli tentò di unire la gravità e l’elettromagnetismo, e, indicando con A il 4-potenziale elettromagnetico, scrisse
∇igjk = Ajgik −Akgij
Una delle conseguenze delle sue teorie è che l’angolo tra due vettori trasportati non cambia, ma il loro modulo sì.2per maggiori dettagli consultare Gravitation, di Misner, Thorne e Wheeler, Box 9.2.
Scriviamo le componenti di T in una base di coordinate:
T ikl = T(dxi, ∂k, ∂l
)= dxi(∇ek∂l −∇el∂k −[∂k, ∂l])
ma tale espressione è uguale, per la (2.3.21) a
T ikl = dxi(
Γjkl∂j − Γjlk∂j
)= Γikl − Γilk (2.3.31)
perciòT ikl = 0 ⇐⇒ Γikl = Γilk (2.3.32)
Vogliamo ora usare la metricità e la simmetria per determinare le componenti Γikl, e quindi ∇: sfruttandola (2.3.29), fissata una base di coordinate, si ha
∇g = 0 =⇒ gjk,i − Γmijgmk − Γmikgjm = 0
Riscriviamo due volte la stessa equazione con gli indici permutati:
Per simmetria, equazione (2.3.32), molti termini si cancellano e rimane
Γmijgmk =1
2(gjk,i + gki,j − gij,k)
per cui
Γlij =1
2glk(gjk,i + gki,j − gij,k) (2.3.33)
cioè la connessione lineare è completamente determinata dalla metrica e dalle sue derivate. Una con-nessione metrica e simmetrica viene anche chiamata connessione di Levi-Civita e i coefficienti Γlijvengono detti simboli di Christoffel.
Osservazione 2.16. In uno spaziotempo piatto (per cui la matrice metrica è costante) si ha che Γlij = 0usando coordinate cartesiane, per cui la derivata covariante si riduce a quella classica; in uno spaziotempopiatto con coordinate non cartesiane non si ha necessariamente Γlij = 0.
Esempio 2.12. Calcoliamo i coefficienti di connessione per la due sfera S2.
Ricordiamo quanto scritto nella (2.3.11):
ds2 = dϑ2 + sin2ϑ dφ2
Allora si ha chegϑϑ = 1 gφφ = sin2ϑ gϑϑ = 1 gφφ =
1
sin2ϑ
usiamo quindi la (2.3.33):
Γϑϑϑ =1
2gϑk(gϑk,ϑ + gkϑ,ϑ − gϑϑ,k) = 0
Γϑϑφ =1
2gϑk(gφk,ϑ + gkϑ,φ − gϑφ,k) = 0 =⇒ Γϑφϑ = 0
Γϑφφ =1
2gϑk(gφk,φ + gkφ,φ − gφφ,k) = −1
2∂ϑgφφ = − sinϑ cosϑ
In modo analogo si trova che
Γφϑϑ = Γφφφ = 0 Γφϑφ = Γφφϑ = cotϑ
2.3. Varietà (pseudo-)riemanniane 41
2.3.2 Geodetiche
Dati due punti p, q su di una varietà X, qual è la curva C ⊂ X più corta che colleghi p e q? SupponiamoX varietà riemanniana1 e consideriamo dunque un cammino C : t 7→ C(t) tale che C(t0) = p e C(t1) = q;allora la lunghezza della curva è data da
l =
q∫
p
√gij dxidxj =
t1∫
t0
√gij
dxi
dt
dxj
dtdt (2.3.34)
dove la quantitàdxi
dtsono le componenti del vettore tangente, prima chiamate anche
dCi
dt. La curva più
corta è tale che l è estremale, ovvero δl = 0, perciò useremo il principio variazionale già visto in meccanicaclassica.
Figura 2.6: tre curve su di una varietà X aventi estremi coincidenti.
Andiamo quindi a calcolare δl:
δl =
t1∫
t0
1
2
(gkl
dxk
dt
dxl
dt
)−1/2[δgij
dxi
dt
dxj
dt+ gij
dδxi
dt
dxj
dt+ gij
dxi
dt
dδxj
dt
]dt
Notiamo innanzitutto che i termini in cui compare un termine dδxk con k = i e k = j sono uguali;inoltre, poichè la lunghezza della curva è indipendente dalla parametrizzazione, cioè l è invariante sottoriparametrizzazione t 7→ t(t), possiamo sempre scegliere una parametrizzazione tale che
gijdxi
dt
dxj
dt= 1
il che equivale a prendere la lunghezza della curva come parametro.
δl =
t1∫
t0
[1
2δgij︸︷︷︸
gij,kδxk
dxi
dt
dxk
dt+ gij
dδxi
dt
dxj
dt
]dt
Integrando ora per parti il secondo addendo e tenendo conto che δxi∣∣t0
= δxi∣∣t1
= 0 rimane solo:
δl =
t1∫
t0
[1
2gij,kδx
k dxi
dt
dxj
dt− δxi d
dt
(gij
dxj
dt
)]dt
1si può estendere il discorso anche alle varietà pseudo-riemanniane.
Affinchè si abbia δl = 0 per ogni variazione δxk deve valere che
1
2gij,k
dxi
dt
dxj
dt− d
dt
(gkj
dxj
dt
)= 0 (2.3.35)
La (2.3.35) può essere riscritta come
1
2gij,k
dxi
dt
dxj
dt− gkj,i
dxi
dt
dxj
dt− gkj
d2xj
dt2= 0 (2.3.36)
e può essere resa più simmetrica sfruttando la seguente espressione
gkj,idxi
dt
dxj
dt=
1
2gkj,i
dxi
dt
dxj
dt+
1
2gki,j
dxj
dt
dxi
dt
Sostituendo nell’espressione (2.3.36) queste modifiche e cambiando segno otteniamo:
gkjd2xj
dt2+
1
2(gkj,i + gki,j − gij,k)
dxi
dt
dxj
dt= 0
Moltiplicando ora ambo i membri per glk si ottiene
d2xl
dt2+
1
2glk(gkj,i + gki,j − gij,k)
dxi
dt
dxj
dt= 0
ovvero, per la (2.3.33):d2xl
dt2+ Γlij
dxi
dt
dxj
dt= 0 (2.3.37)
che costituisce il sistema di equazioni di Eulero-Lagrange del principio variazionale. Una curva t 7→ xi(t)che soddisfa la (2.3.37), che noi chiameremo d’ora in poi come equazione delle geodetiche, viene chiamatageodetica.
Proposizione 2.3.1. La (2.3.37) è equivalente a
∇uu = 0 (2.3.38)
dove ui =dxi
dt.
Dimostrazione
∇uu = 0 ⇐⇒ ∇uiei(ujej
)= 0
(2.3.22)⇐⇒ ui∇ei(ujej
)= 0 ⇐⇒ ui
(ei(uj)ej + uj ∇eiej︸ ︷︷ ︸
Γkijek
)= 0
L’ultima equazione è equivalente aui(ei(uk)
+ Γkijuj)
= 0
ma
uiei(uk)
= u(uk) (2.2.4)
=duk
dt=⇒ duk
dt+ Γkiju
iuj = 0
2.3. Varietà (pseudo-)riemanniane 43
La (2.3.38) significa che una geodetica è una curva C il cui vettore tangente è trasportato parallelamentelungo C.
Esempio 2.13. Risolviamo la (2.3.37) per la 2-sfera S2, usando(x1, x2
)=(φ, ϑ):
l = 1 =⇒ φ+ Γφijdxi
dt
dxj
dt= 0
ricordiamo1 che Γφij 6= 0 se ij = φϑ ∨ ij = ϑφ perciò
φ+ 2Γφφϑ = 0 =⇒ φ+ 2 cotϑ φ ϑ = 0 l = 1
ϑ+ Γϑφφ φ2 = 0 =⇒ ϑ− sinϑ cosϑ φ2 = 0 l = 2
Moltiplichiamo la prima per sin2ϑ ottenendo così
sin2ϑ φ+ 2 cosϑ sinϑ ϑ φ = 0 =⇒ d
dt
(sin2ϑ φ
)= 0 =⇒ sin2ϑ φ = k
Nel caso particolare in cui k = 0 si ha φ costante, e perciò ϑ = at+ b, ovvero la geodetica è un meridiano;se k 6= 0, sostituiamo l’espressione di φ(ϑ) nella seconda equazione, perciò
ϑ− k2 cosϑ
sin3ϑ= 0 =⇒ ϑϑ− k2 cosϑ
sin3ϑϑ = 0
integro=⇒ 1
2ϑ2 +
k2
2 sin2ϑ=d2
2
dove d è una costante. k viene interpretata fisicamente come l’energia di una particella che si muove sulla2-sfera. Separando le variabili si risolve l’equazione differenziale così ottenuta:
dϑ
dt= ϑ = ±
√d2 − k2
sin2ϑ
perciò
t = ±∫ (
d2 − k2
sin2ϑ
)− 12
dϑ = ±∫
sinϑdϑ√d2 sin2ϑ− k2
x= cosϑ= ∓
∫dx√
d2(1− x2)− k2
2.3.3 Curvatura e tensore di RiemannIl nostro concetto intuitivo di curvatura proviene soprattutto dalle superfici bidimensionali immerse in R3,che corrisponde al concetto di curvatura estrinseca di una varietà immersa in uno spazio a dimensionepiù alta. Il nostro problema è che lo spaziotempo (X, g) non è sempre immergibile in qualche spazioa dimensione maggiore (almeno non in una maniera naturale); abbiamo così bisogno di un concettointrinseco di curvatura, senza riferirci ad uno spazio di immersione. Un tale concetto può essere definitoin termini di trasporto parallelo.
Figura 2.7: Il trasporto parallelo di un vettore v a partire da un punto p lungo una curva chiusa su di unpiano fa sì che il vettore v torni in se stesso.
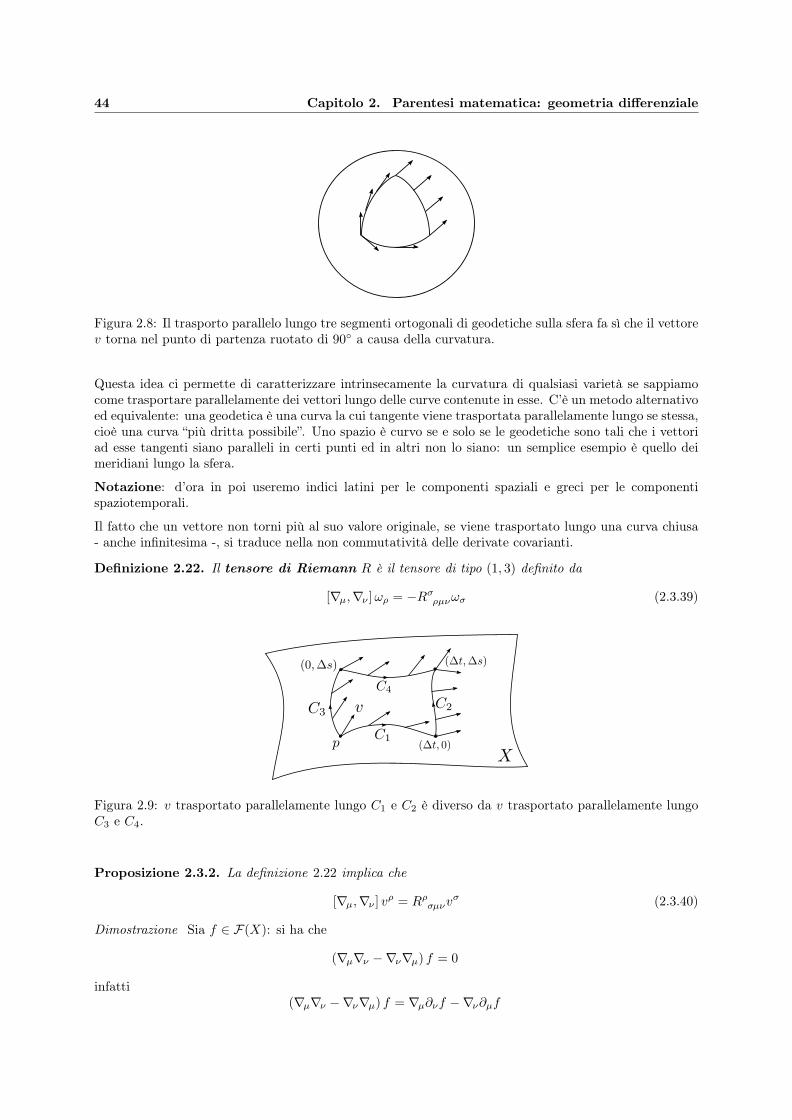
Figura 2.8: Il trasporto parallelo lungo tre segmenti ortogonali di geodetiche sulla sfera fa sì che il vettorev torna nel punto di partenza ruotato di 90 a causa della curvatura.
Questa idea ci permette di caratterizzare intrinsecamente la curvatura di qualsiasi varietà se sappiamocome trasportare parallelamente dei vettori lungo delle curve contenute in esse. C’è un metodo alternativoed equivalente: una geodetica è una curva la cui tangente viene trasportata parallelamente lungo se stessa,cioè una curva “più dritta possibile”. Uno spazio è curvo se e solo se le geodetiche sono tali che i vettoriad esse tangenti siano paralleli in certi punti ed in altri non lo siano: un semplice esempio è quello deimeridiani lungo la sfera.
Notazione: d’ora in poi useremo indici latini per le componenti spaziali e greci per le componentispaziotemporali.
Il fatto che un vettore non torni più al suo valore originale, se viene trasportato lungo una curva chiusa- anche infinitesima -, si traduce nella non commutatività delle derivate covarianti.
Definizione 2.22. Il tensore di Riemann R è il tensore di tipo (1, 3) definito da
[∇µ,∇ν ]ωρ = −Rσρµνωσ (2.3.39)
Figura 2.9: v trasportato parallelamente lungo C1 e C2 è diverso da v trasportato parallelamente lungoC3 e C4.
Proposizione 2.3.2. La definizione 2.22 implica che
[∇µ,∇ν ] vρ = Rρσµνvσ (2.3.40)
Dimostrazione Sia f ∈ F(X): si ha che
(∇µ∇ν −∇ν∇µ) f = 0
infatti(∇µ∇ν −∇ν∇µ) f = ∇µ∂νf −∇ν∂µf
2.3. Varietà (pseudo-)riemanniane 45
poichè f non ha indici, non avrà nemmeno termini di correzione oltre alla normale derivazione; sfruttandoora la (2.3.24) otteniamo
∇µ∂νf −∇ν∂µf = ∂µνf − Γρµν∂ρf −(∂νµf − Γρνµ∂ρf
)=(Γρνµ − Γρµν
)∂ρf = 0
l’ultimo passaggio è giustificato dal fatto che la torsione è nulla. Allora possiamo scrivere
Calcoliamo un’espressione esplicita per il tensore di Riemann:
([∇µ,∇ν ])ωρ = ∇µ(∂νωρ − Γσνρωσ
)−∇ν
(∂µωρ − Γσµρωσ
)
= ∂µ(∂νωρ − Γσνρωσ
)−((((
((((((
Γλνµ(∂λωρ − Γσλρωσ
)− Γλµρ(∂νωλ − Γσνλωσ) +
− ∂ν(∂µωρ − Γσµρωσ
)+(((
(((((((
Γλνµ(∂λωρ − Γσλρωσ
)+ Γλνρ
(∂µωλ − Γσµλωσ
)
Per simmetria si cancellano i primi due termini della seconda riga coi primi due1 dell’ultima riga; sempreper simmetria, si sommano gli ultimi membri di tali righe e quindi riscriviamo tale espressione come
−Rσρµν ωσ = −(∂µΓσνρ
)ωσ +
(∂νΓσµρ
)ωσ + ΓλµρΓ
σνλωσ− ΓλµρΓ
σµνωσ
perciò si ottiene, scambiando opportunamente gli indici e togliendo la dipendenza da ωσ:
Rσρµν = ∂µΓσνρ − ∂νΓσµρ + ΓλνρΓσµλ − ΓλµρΓ
σνλ (2.3.41)
da cui notiamo che per definire il tensore di Riemann non serve una metrica, ma il solo trasporto parallelo.
Proposizione 2.3.3. Stabilito che Rρµνλ = gρσRσµνλ, il tensore di Riemann ha le seguenti proprietà:
1. Rρµνλ = −Rµρνλ se ∇µgνλ = 0;
2. Rρµνλ = −Rρµλν ;3. Rρµνλ = Rνλρµ;
4. Rµ[ρνλ] = 0 (prima identità di Bianchi);
5. Rσλ[νρ;µ] = 0 (seconda identità di Bianchi)2.
Dimostrazione
1. Moltiplichiamo a sinistra il tensore di Riemann per gλρ:
gλρ[∇µ,∇ν ] vρ = Rρσµνvσgλρ =⇒
∇g=0
−Rρλµν︷ ︸︸ ︷[∇µ,∇ν ] vλ = Rλσµνv
σ = −Rσλµνvσ
Ora abbassiamo σ su R ed alziamolo su v, ovvero
Rσλµνvσ = gσρR
ρλµνv
σ = Rρλµνvρ
otteniamo perciò la tesi, in quanto
−Rσλµνvσ = Rσλµνvσ = Rρλµνvρ
1il primo col primo ed il secondo con il secondo.2si vedano le equazioni di Maxwell omogenee, a volte viene chiamata anche identità di Bianchi, F[νρ,µ] = 0.
5. È la generalizzazione di [∇µ,∇ν ]ωρ = −Rσρµνωσ al caso di un tensore di tipo (0, 2): si dimostri peresercizio che
[∇µ,∇ν ] tρλ = −Rσρµνtσλ −RσλµνtρσTale relazione implica che
(∇µ∇ν −∇ν∇µ)∇ρωλ = −Rσρµν∇σωλ −Rσλµν∇ρωσ (2.3.42)
D’altra parte
∇µ(∇ν∇ρωλ −∇ρ∇νωλ) = ∇µ(−Rσλµρωσ
)= −ωσ∇µRσλνρ −Rσλνρ∇µωσ (2.3.43)
Ora antisimmetriziamo la (2.3.42) e la (2.3.43) in µ, ν, ρ: i membri sinistri diventano uguali,ricordando che
T[µνρ] =1
3!(Tµνρ + Tρµν + Tνρµ − Tνµρ − Tρνµ − Tµρν)
Come membri destri abbiamo:
Rσ[ρµν]∇σωλ︸ ︷︷ ︸=0 per 4.
+Rσλ[µν∇ρ]ωσ = ωσ∇[µRσ|λ|νρ] +Rσλ[νρ∇µ]ωσ
dove con |λ| si indica che non si antisimmetrizza su λ. Gli ultimi due termini di ambo i membri sielidono per antisimmetria, perciò rimane, ∀ω:
ωσ∇[µRσ|λ|νρ] = 0 =⇒ ∇[µR
σ|λ|νρ] = 0
che equivale a Rσλ[νρ;µ] = 0.
La proprietà 5. del tensore di Riemann ha portato Einstein alla forma giusta delle sue equazioni. Ilnumero di componenti indipendenti del tensore di Riemann è1
N2
12
(N2 − 1
)
dove N è il numero di dimensioni.
Definizione 2.23. A partire dal tensore di Riemann si definiscono:
• il tensore di Ricci:Rµν := Rλµλν (2.3.44)
• lo scalare di curvatura:R := Rνν = gνµRµν (2.3.45)
• il tensore di Einstein:
Gµν := Rµν −1
2Rgµν (2.3.46)
1senza dimostrazione.
2.3. Varietà (pseudo-)riemanniane 47
Dalla seconda identità di Bianchi e grazie all’antisimmetria del tensore di Riemann si ha che
Rσλνρ;µ +Rσλµν;ρ +Rσλρµ;ν = 0
e sia ora σ = ν, perciòRσλσρ;µ +Rσλµσ;ρ +Rσλρµ;σ = 0
Ma Rσλµσ;ρ = −Rσλσµ;ρ per la proprietà 2. del tensore di Riemann; ciò implica che
Rλρ;µ −Rλµ;ρ +Rσλρµ;σ = 0
moltiplicando tutto per gλρ si ottiene
gλρRλρ;µ − gλρRλµ;ρ + gλρRσλρµ;σ = 0
In quanto ∇g = 0 possiamo riscrivere tale relazione come
(R︷ ︸︸ ︷
gλρRλρ)
;µ−(gλµRλµ
);ρ
+(gλµRσλρµ
);σ
= 0 =⇒ R;µ −Rρµ;ρ +Rσρρµ;σ = 0
Ma Rσρρµ;σ = −Rρσρµ;σ per la proprietà 1. del tensore di Riemann, per cui
R;µ −Rρµ;ρ −Rσµ;σ = 0
da cui deriva che, per la (2.3.46):Gρµ;ρ = 0 (2.3.47)
ovvero la divergenza covariante del tensore di Einstein è nulla.
Quello che ora ci prefiggiamo come obiettivo è andare a calcolare δvρ dopo il trasporto parallelo lungouna curva chiusa infinitesima C : t 7→ C(t) tale che C(0) = p = C(t1); definito u come il vettore tangente
a C, ovvero tale che uµ =dxµ
dt, dobbiamo risolvere il sistema
∇uv = 0
v(t = 0) = vp
Figura 2.10: rappresentazione della situazione descritta.
Raccogliendo a destra1 vν(0) e reintroducendo i dt possiamo andare ad integrare in dt ambo i membri:
t1∫
0
dvρ =
t1∫
0
[−Γρµν(x0) + Γρµσ(x0)Γσλν(x0)(xλ − xλ0 )− Γρµν,λ
∣∣∣x0
(xλ − xλ0 ) + ϑ(x− x0)2
]vν(0)
dxµ
dtdt
Notiamo che il termine −Γρµν(x0) è un termine costante che non contribuisce all’integrale, in quanto∮k dxµ = 0
Rimane quindi
vρ(t1)− vρ(0) =
[Γρµσ(x0)Γσλν(x0)− Γρµν,λ
∣∣∣x0
]vν(0)
t1∫
0
(xλ − xλ0
) dxµ
dtdt
=[Γρ[µ|σ|Γ
σλ]ν − Γρ[µ|ν|,λ]
]x0
vν(0)
∮
C
xλdxµ
L’antisimmetrizzazione è giustificata dal fatto che, prendendo una superficie A tale che C = +∂A,possiamo usare il teorema di Stokes2:
∮
C
xλdxµ =
∫
A
dxλ ∧ dxµ
si ottiene perciò
vρ(t1)− vρ(0) = δvρ =[Γρ[µ|σ|Γ
σλ]ν − Γρ[µ|ν|,λ]
]x0
vν(0)
∫
A
dxλ ∧ dxµ
1ciò richiede chiaramente un cambio di indici opportuno.2in generale, il teorema di Stokes afferma che, dati un “circuito” p-dimensionale chiuso C, una “superficie”
(p+ 1)-dimensionale A tale che +∂A = C ed una p-forma ω, vale che∮C
ω =
∫A
dω
Notiamo che tale teorema contiene anche quello di Gauss.
2.3. Varietà (pseudo-)riemanniane 49
Antisimmetrizzando tale espressione e riutilizzando il teorema di Stokes si ha
δvρ =1
2
[ΓρµσΓ
σµν − ΓρλσΓ
σµν − Γρµν,λ + Γρλν,µ
]x0
vν(0)
∮
C
xλdxµ
Tra le parentesi quadre è presente l’espressione del tensore di Riemann, ovvero
δvρ = Rρνµλ
∣∣∣x0
vν(0)
∮
C
xλdxµ (2.3.49)
2.3.4 Equazione della deviazione geodeticaL’equazione della deviazione geodetica lega la tendenza delle geodetiche ad avvicinarsi l’una all’altra o adallontanarsi una dall’altra alla curvatura della varietà. Questo fornisce un altro modo per caratterizzarela curvatura: consideriamo una famiglia ad un parametro di geodetiche γs(t) in modo tale che, ∀s ∈ R,la curva γs è una geodetica con parametro affine t, ovvero t è tale che ∇uu = 0 con u = ∂t
1.
Figura 2.11: rappresentazione della situazione descritta a breve.
T := ∂t è il vettore tangente alla geodetica, perciò ∇TTµ = 0; X := ∂s rappresenta lo spostamento dauna geodetica ad un’altra infinitesimamente vicina.
Proposizione 2.3.4. Con una riparametrizzazione t 7→ t′ = b(s)t+ c(s) possiamo sempre porre
XµTµ = 0 per t = 0 ed inoltre ∇X(TµTµ) = 0
quindi TµTµ non dipende nè da s nè da t, in quanto
∇TTµTµ = 2Tµ∇TTµ = 0
Dimostrazione La trasformazione diretta èt′ = b(s)t+ c(s)
s′ = s
mentre quella inversa è data da t =
t′ − c(s′)b(s′)
s = s′
Perciò, secondo la definizione, avremo che
T ′ =∂
∂t′=
∂t
∂t′∂
∂t=
1
b(s)T
1per maggiori approfondimenti, svolgere l’esercizio su geodetiche e parametro affine.
Imponiamo la condizione di ortogonalità tra X ′ e T ′ in t′ = 0
0 = 〈X ′, T ′〉 =
⟨T∂t
∂s′+X,
1
bT
⟩=
1
b
⟨−bc′(s′) + cb′ (s′)b2
T +X,T
⟩=⇒ bc′(s′)− cb′(s′)
b2=〈X,T 〉〈T, T 〉
∣∣∣∣t′=0
ed inoltre0
!=
∂
∂s′〈T ′, T ′〉 =
∂
∂s′
(1
b2〈T, T 〉
)
Il termine tra parentesi tonde è solo funzione di s′ e perciò, avendo derivata rispetto ad s′ nulla, esso saràuna costante k che può essere fissata arbitrariamente ad 1 senza perdita di generalità, effettuando al piùun riscalamento di b.
1
b2〈T, T 〉 = 1 =⇒ b2 = 〈T, T 〉
Notiamo che〈T, T 〉
∣∣∣∣t′=0
= 〈T, T 〉∣∣∣∣t=−c/b
= 〈T, T 〉
e, sostituendo il valore di 〈T, T 〉 nella relazione precedentemente trovata si ha che
c′(s′)b− cb′(s′) = 〈X,T 〉∣∣∣∣t′=0
che è un’equazione differenziale in c(s′) che ha sempre soluzione. Per noi vale che
[X,T ] =[∂s, ∂t] = 0 =⇒ Xµ∇µT ν = Tµ∇µXν
essendo nulla la torsione; inoltre
∇T(XµTµ) =(∇TXµ)Tµ +Xµ∇TTµ =(T ν∇νXµ)Tµ
poichè ∇TTµ = 0 in quanto vettore tangente ad una geodetica. Ma allora, sostituendo il risultato appenaottenuto nell’ultima relazione:
∇T(XµTµ) =(T ν∇νXµ)Tµ =(Xν∇νTµ)Tµ =1
2Xν∇ν(TµTµ) =
1
2∇X(TµTµ) = 0
grazie all’apposita riparametrizzazione; da ciò consegue che XµTµ è costante lungo ogni geodetica, esiccome tale quantità è 0 per t = 0 allora è 0 per qualsiasi t.
La quantitàvµ := T ν∇νXµ
viene interpretata come la velocità relativa di una geodetica infinitesimamente vicina; si definisce anchel’accelerazione relativa, come
aµ := T ν∇νvµ
Cerchiamo ora una relazione tra aµ ed il tensore di Riemann:
aµ = T ν∇ν(Tλ∇λXµ
)= T ν∇ν
(Xλ∇λTµ
)= T ν
(∇νXλ
)∇λTµ + T νXλ∇ν∇λTµ
ma essendo [X,T ] = 0 e sfruttando la (2.3.40) vale che
T ν(∇νXλ
)∇λTµ = Xν
(∇νTλ
)∇λTµ ∇ν∇λTµ = ∇λ∇νTµ +RµσνλT
σ
perciò, sostituendo nell’espressione di aµ precedente e scambiando nel secondo addendo µ con λ, otteniamo
aµ = Xν∇ν(Tλ∇λTµ
)+RµσλνT
λXνTσ
2.3. Varietà (pseudo-)riemanniane 51
Notiamo ora che il primo termine è nullo, perchè T è vettore tangente lungo una geodetica: perciò
aµ = RµσλνTλXνTσ (2.3.50)
Tale equazione prende il nome di equazione della deviazione geodetica, da cui consegue direttamenteche il tensore di Riemann non è 0 se e solo se le geodetiche accelerano l’una rispetto all’altra; geodeticheinizialmente parallele, nel senso che vµ = 0, rimangono parallele se e solo se il tensore di Riemann è nullo.
Esempio 2.14. Ricaviamo l’espressione delle forze fittizie a partire da un sistema rotante.
Ci serviremo della metrica di Minkowski
ds2 = −dt2 + dx2 + dy2 + dz2
e delle coordinate di Born, utili per descrivere un sistema a partire da un osservatore rotante, date da
x = r cos(ϑ+ ωt)
y = r sin(ϑ+ ωt)
z = z
t = t
=⇒
dx = cos(ϑ+ ωt) dr − r sin(ϑ+ ωt)(dϑ+ ωdt)
dy = sin(ϑ+ ωt) dr + r cos(ϑ+ ωt)(dϑ+ ωdt)
dz = dz
dt = dt
perciò la metrica, nelle coordinate (t, ϑ, r, z), diventa
ds2 = −(1− ω2r2
)dt2 + dr2 + r2dϑ2 + dz2 + 2r2ωdϑdt
Osserviamo immediatamente che per r > ω−1 il vettore tangente ∂t diventa un vettore di tipo spazio, acausa della rotazione rigida; la matrice inversa della metrica sarà
(gµν) =
−1 ω 0 0ω r−2 − ω2 0 00 0 1 00 0 0 1
avendo ordinato i “posti” come (t, ϑ, r, z). A questo punto possiamo andare a calcolare i simboli diChristoffel: riscriviamo per comodità la (2.3.33)
e gli altri coefficienti sono nulli. Un metodo alternativo di calcolare i simboli di Christoffel è usare la(2.3.18), ovvero
Γ′ = J−1ΓJ2 + JdJ
dove J è la matrice Jacobiana del cambio di coordinate, per partire dai simboli di Christoffel Γ dellecoordinate cartesiane. Possiamo ora calcolare l’equazione delle geodetiche, secondo la (2.3.37), ovvero
Un metodo più veloce e valido in generale è sfruttare i principi variazionali:
δ
∫(±gµν xµxν)
12 dτ = 0 e δ
∫gµν x
µxνdτ = 0
tali due condizioni portano alle equazioni delle geodetiche. La nostra Lagrangiana è dunque
L = gµν xµxν =
(ω2r2 − 1
)t2 + r2 + r2ϑ2 + z2 + 2r2ωϑt
ed applicando le equazioni di Eulero-Lagrange
d
dτ
∂L
∂xµ− ∂L
∂xµ= 0
otteniamo il sistema di equazioni differenziali
(r2ω2 − 1
)t+ 2ω2rtr + r2ωϑ+ 2rωϑr = 0
r − ω2rt2 − rϑ2 − 2ωrϑt = 0
2rrϑ+ r2ϑ+ 2ωrtr + ωr2t = 0
z = 0
Notiamo che, sottraendo alla prima equazione del sistema la seconda moltiplicata per ω, si ottiene dinuovo t = 0, che, sostituita nella seconda equazione del sistema, porta a
ϑ+2ω
rrt+
2
rrϑ = 0
Da t = 0 ricaviamo t = aτ + b, dove a e b sono costanti: vale perciò
d
dτ=
dt
dτ
d
dt= a
d
dt
che ci permette di riscrivere tutte le derivate rispetto a τ come derivate rispetto a t, ovvero
r − ω2rt2 − rϑ2 − 2ωrϑt = 0 =⇒ d2r
dt2− ω2r − r
(dϑ
dt
)2
− 2ωrdϑ
dt= 0
dove in ω2r riconosciamo la forza centrifuga; allo stesso modo
ϑ+2ω
rrt+
2
rrϑ = 0 =⇒ d2ϑ
dt2+
2ω
r
dr
dt+
2
r
dr
dt
dϑ
dt= 0
Introduciamo ora le coordinate polari (r, ϑ) nel piano rotante, date da
r =
(x′
y′
)=
(r cosϑr sinϑ
)
avendo indicato con (x′, y′) le coordinate cartesiane nel piano rotante. Definiti i vettori di baseer = cosϑ ex′ + sinϑ ey′
eϑ = − sinϑ ex′ + cosϑ ey′
vale che
r = x′ex′ + y′ey′ = r cosϑ ex′ + r sinϑ ey′ =⇒ r =(r cosϑ− r sinϑϑ
)ex′ +
(r sinϑ+ r cosϑϑ
)ey′
Andiamo ad imporre dunque
d2r
dt2=
[d2r
dt2− r(
dϑ
dt
)2]er +
(2
dr
dt
dϑ
dt+ r
d2ϑ
dt2
)eϑ =
F
m=
1
m
(F rer + Fϑeϑ
)
2.3. Varietà (pseudo-)riemanniane 53
che implica
F r = m
(ω2r + 2ωr
dϑ
dt
)
Fϑ = −2mωdr
dt
avendo usato le equazioni prima ottenute:
d2r
dt2− ω2r − r
(dϑ
dt
)2
− 2ωrdϑ
dt= 0
d2ϑ
dt2+
2ω
r
dr
dt+
2
r
dr
dt
dϑ
dt= 0
Abbiamo già notato la presenza della forza centrifuga; ci sarà in più la forza di Coriolis
Fc = −2mω × v = −2mωez ×(vrer + vϑeϑ + vzez
)= −2mω
(vreϑ − vϑer
)
perciò
Fϑc = −2mωvr = −2mωdr
dt
F rc = 2mωvϑ = 2mωrdϑ
dt
2.3.5 Vettori di KillingConsideriamo un diffeomorfismo xµ 7→ x′µ = xµ+ξµ(x) dove ξµ è infinitesimale1; come cambia la metricasotto tale cambio di coordinate? Ci interessa la quantità
δgµν := g′µν(x)− gµν(x)
Sappiamo cheg′µν(x′)dx′µdx′ν = gµν(x)dxµdxν
in quanto la distanza (al quadrato) tra due punti non può variare a seconda delle coordinate; ma allora
Scriviamo le derivate della metrica in funzione dei simboli di Christoffel:
δgµν = −(
Γηλµgην + Γηλνgηµ
)ξλ − ξµ,ν +
(Γηνµgηλ + Γηνλgηµ
)ξλ − ξν,µ +
(Γηµλgην + Γηµνgηλ
)ξλ
= −Γνλµξλ − Γµλνξ
λ − ξµ,ν + Γλνµξλ + Γµνλξ
λ − ξν,µ + Γνµλξλ + Γλµνξ
λ
= −(∂µξν − Γλµνξ
λ)−(∂νξµ − Γλνµξ
λ)
ovveroδgµν = −∇µξν −∇νξµ = −(Lξg)µν (2.3.51)
avendo indicato con Lξ la derivata di Lie1 di ξ. In particolare vale δgµν = 0 quando i vettori ξ soddisfano
∇µξν +∇νξµ = 0 (2.3.52)
I vettori ξ che soddisfano tale relazione vengono detti vettori di Killing: se si effettua un movimentolungo di essi la metrica non cambia.
Proposizione 2.3.5. Su di una varietà (semi-)riemanniana N -dimensionale ci sono al massimoN(N + 1)/2 vettori di Killing. Se ce ne sono proprio N(N + 1)/2 allora lo spazio è a curvatura costante- vale anche il viceversa - cioè
Rµνρσ = λ(gµρgνσ− gµσgνρ)
Esercizio 2.12. Si dimostri che λ =R
N(N − 1).
Esempio 2.15. Calcoliamo i vettori di Killing per la 2-sfera.
La metrica sulla 2-sfera è data dads2 = dϑ2 + sin2ϑdϕ2
troviamo i vettori v di Killing tramite l’equazione (2.3.52):
∂µvν − Γαµνvα + ∂νvµ − Γανµvα = 0
che possiamo riscrivere attraverso la simmetria negli ultimi due indici dei simboli di Christoffel come
∂µvν + ∂νvµ − 2Γαµνvα = 0
Gli unici Γαµν nonnulli sono, ricordando l’esempio 2.12:
Notiamo che lo spazio delle soluzioni ha dimensione 3, ovvero abbiamo il massimo numero di vettori diKilling, ed infatti la 2-sfera ha curvatura è costante. Scegliendo A = B = 0, C = 1 otteniamo v(1) = ∂ϕ,
1in generale, dato un tensore g di tipo (0, 2) anche Lξg è un tensore di tipo (0, 2), con:
(Lξg)µν = ξα∇αgµν + gαµ∇νξα + gαν∇µξα
tuttavia g è covariantemente costante. . .
2.3. Varietà (pseudo-)riemanniane 55
soluzione che potevamo aspettarci a priori in quanto la metrica g non dipende da ϕ; inoltre sostituendoi valori A = 1, B = C = 0 e B = −1, A = C = 0 si ottengono
Tale scelta dei v(i) ci permette di notare che[v(i), v(j)
]= εijkv(k)
ovvero vale la relazione di commutazione tipica del gruppo delle rotazioni.
Proposizione 2.3.6. Se ξ è un vettore di Killing e γ una geodetica con vettore tangente u, allora laquantità uµξµ è costante lungo γ.
Dimostrazione
∇u(uµξµ) =(∇uuµ︸ ︷︷ ︸
=0 geod.
)ξµ + uµ∇uξµ =
simm.︷ ︸︸ ︷uµuν ∇νξµ︸ ︷︷ ︸
antisimm.
= 0
Ad ogni vettore di Killing possiamo associare una costante del moto: questo è utile per esempio nellostudio del moto di un corpo nella metrica di Schwarzschild.
Esempio 2.16. Usiamo i vettori di Killing per ottenere le geodetiche sulla 2-sfera.
Detto λ il parametro affine, la tangente alle traiettorie xµ è data da
uµ =dxµ
dt
Facendo riferimento ai v(i) definiti nell’esempio 2.15, troviamo le costanti secondo la proposizione appenavista:
⟨u, v(1)
⟩= 〈u, ∂ϕ〉 = gµνu
µ(∂ϕ)ν
= gϕϕuϕ = sin2ϑ
dϕ
dλ=: a
⟨u, v(2)
⟩=
dϕ
dλsinϕ cotϑ sin2ϑ− dϑ
dλcosϕ =: b
⟨u, v(3)
⟩=
dϕ
dλcosϕ cotϑ sin2ϑ+
dϑ
dλsinϕ =: c
Ma valgono le seguenti relazioni:
a cotϑ = b sinϕ+ c cosϕ a cosϑ =(b sinϕ+ c cosϕ) sinϑ
Sostituendo nella relazione a sinistra b = c = 0 si ottiene
cotϑ = 0 =⇒ ϑ =π
2
che è la geodetica particolare comunemente nota come equatore. Osservando invece la relazione a destrasi nota che, essendo
x = sinϑ cosϕ
y = sinϑ sinϕ
z = cosϑ
essa diventaaz = by + cx
cioè essa afferma che le geodetiche si ottengono come intersezioni tra piani di questo tipo e la 2-sfera.
Capitolo 3
Le equazioni di Einstein
3.1 Il tensore energia momentoIn relatività ristretta, le distribuzioni continue di materia sono descritte da un tensore simmetrico Tµν ,chiamato tensore energia momento, le cui componenti hanno il seguente significato fisico:
• T 00 è la densità di energia;
• T 0i = T i0 è la densità di quantità di moto;
• −T ij è il tensore degli sforzi.
3.1.1 Meccanica dei continuiApriamo una breve parentesi sulla meccanica dei continui a proposito degli sforzi; lo sforzo è dato da,presi i vettori forza ed area infinitesimi:
dF = S dA dFi = Sij dAj
S è un tensore, detto tensore degli sforzi; non necessariamente dF ‖ dA, dove dA = ndA avendodefinito n il versore normale ad A.
Figura 3.1: rappresentazione della situazione descritta.
La conservazione del tensore energia momento in un sistema isolato è scrivibile come:
∂µTµν = 0 (3.1.1)
mentre in un sistema non isolato, detta kν la densità di forza:
∂µTµν = kν (3.1.2)
58 Capitolo 3. Le equazioni di Einstein
Esempio 3.1. Per definizione un fluido perfetto è una distribuzione continua di materia con tensoreenergia momento della forma
Tµν = ρ uµuν + P(ηµν + uµuν) (3.1.3)
dove η è la metrica, ρ la densità di energia, P la pressione e uµ è un vettore di tipo tempo tale cheηµν u
µuν = −1, e che rappresenta la 4-velocità del fluido. Nel sistema di quiete
(uν) = (1, 0, 0, 0) =⇒ Tµν =
ρ 0 0 00 P 0 00 0 P 00 0 0 P
dove ρ è la densità di energia e P è la pressione misurate nel sistema di quiete. Un fluido viene dettoperfetto perchè non ci sono termini di conducibilità termica e termini di sforzi che corrispondono allaviscosità. Le equazioni del moto per un fluido perfetto senza forze esterne sono date dalla (3.1.1), per cui:
∂µ[ρ uµuν + P(ηµν + uµuν)] = 0
che implica
(∂µρ)uµuν + ρ(∂µuµ)uν + ρ uµ∂µu
ν +(∂µP )(ηµν + uµuν) + P(∂µuµ)uν + P uµ∂µu
ν = 0
Sapendo cheuνu
ν = −1 =⇒ (∂µuν)uν + uν∂µuν = 0 =⇒ (∂µu
ν)uν = 0
e che ηµν + uµuν è una sorta di proiettore lungo la direzione perpendicolare a u, infatti
uν(ηµν + uµuν) = uµ − uµ = 0
moltiplichiamo l’equazione della conservazione di Tµν per uν ottenendo così
uµ∂µρ+ ρ ∂µuµ + P ∂µu
µ = 0 (3.1.4)
che viene detta equazione di continuità relativistica.
Abbiamo visto che la quantità ηµν + uµuν è un proiettore, ma anche δβν + uβuν è un proiettore sulsottospazio perpendicolare ad u, perciò, derivando e moltiplicando la (3.1.3) per tale proiettore:
ρuµ(δβν + uβuν
)∂µu
ν +(∂µP )(δβν + uβuν
)(ηµν + uµuν) + Puµ
(δβν + uβuν
)∂µu
ν = 0
ma (δβν + uβuν
)(ηµν + uµuν) = ηβµ +
uµuβ +
uβuµ − uβuµ uν∂µu
ν = 0
perciò(P + ρ)uµ ∂µu
β +(ηβµ + uβuµ
)∂µP = 0 (3.1.5)
che è l’equazione di Navier-Stokes relativistica. Vediamone il limite non relativistico, per cui
P << ρ = ϑ(mc2
)−−−−→c→∞
∞ e, detto (uµ) = (1,v) con |v| << c, |v| dPdτ
<< |∇P |, perciò dalla (3.1.4)
abbiamo1
∂tρ+ vi∂iρ+ ρ ∂ivi + P ∂iv
i = 0
ma P ∂ivi è trascurabile poichè P << ρ, perciò otteniamo
∂ρ
∂t+∇·(ρv) = 0 (3.1.6)
che è una legge di conservazione dell’energia.
1τ = ct.
3.1. Il tensore energia momento 59
Dalla (3.1.5) segue che
(P + ρ)(∂tv
i + vj∂jvi)
+ ∂iP + vi(∂tP + vj∂jP
)= 0
ma, ancora, P << ρ, ∂tP << ∂iP e vivj∂jP << ∂iP essendo |v| << 1 perciò
ρ
[∂v
∂t+(v · ∇)v
]= −∇P (3.1.7)
che è l’equazione di Eulero.
Proposizione 3.1.1. La (3.1.7) può essere ottenuta anche dal secondo principio di Newton.
Dimostrazione Consideriamo un volume V ; su questo agisce una forza totale data, sfruttando il teoremadi Gauss, da
−∮
∂V
P d2f = −∫
V
∇P dV
da cui segue che ∇P altro non è che una densità di forza, per cui imponiamo1
−∇P = ρdv
dt= ρ
[∂v
∂t+∂v
∂xi∂xi
∂t
]= ρ
[∂v
∂t+(v · ∇)v
]
che è proprio quanto volevamo dimostrare.
Nel sistema di quiete S abbiamo visto che(Tµν) = diag(ρ, P, P, P ); usiamo ora le trasformazioni di Lorentzper passare a descrivere (Tµν) in un sistema di riferimento S′ che si muova rispetto ad S
x′µ = Λµν xν
Avremo quindiT ′µν =
(ΛT T Λ
)µν
= (ΛT ) αµ Tαβ Λβν = Λαµ Tαβ Λβν
dove, definito γ := (1− v2)−1/2:
(Λµν) =
γ −γvt
−γv(Λij)
Λij = δij + vivj
(γ − 1
v2
)uµ =
dxµ
dτ=
dxµ
dt
dt
dτ= γ
dxµ
dt
l’ultima relazione implica che ui = γvi e u0 = γ. Scrivendo esplicitamente l’espressione di T ′µν abbiamoche
T ′00 = Λα0 Tαβ Λβ0 = Λ00 T00 Λ0
0 + 2Λ00 T0i Λi0 + Λi0 Tij Λj0 = γ2ρ+ γ2vi vj P δij = γ2ρ+ γ2 v2 P
In modo analogo si trovano T ′0i, T ′ij : in uno spaziotempo curvo dobbiamo eseguire le seguenti sostituzioni
ηµν → gµν ∂µ → ∇µperciò il tensore energia-momento del fluido perfetto diventa
Tµν = ρ uµuν + P(gµν + uµuν)
che soddisfa ∇νT νµ = 0.
1secondo la meccanica classica, F = ma =⇒F
V=m
V
dv
dt= ρ
dv
dt.
60 Capitolo 3. Le equazioni di Einstein
3.2 Relazione tra geometria nello spaziotempo e distribuzione dimateria
Qual è l’equazione che descrive il legame tra geometria dello spaziotempo e distribuzione di materia? Unindizio importante viene dal paragone tra le forze di marea descritte dalla gravità newtoniana e dallarelatività generale.
Proposizione 3.2.1. L’accelerazione relativa di due particelle vicine è data, secondo la teoria newtonia-na, da
a = −(y · ∇)∇φ (3.2.1)
dove y è il vettore di separazione delle particelle, e φ è il potenziale gravitazionale newtoniano.
Dimostrazione Se x è la posizione della particella 1, quella della particella 2 è data da x + y; ma alloravalgono
d2xi
dt2= −∂iφ(x)
d2(xi + yi
)
dt2= −∂iφ(x + y)
Supponendo le due particelle vicine, sviluppiamo la seconda equazione, che diventa perciò
d2xi
dt2+
d2yi
dt2= −∂iφ(x + y) ≈ −∂iφ(x)− yj ∂j∂iφ(x)
e sostituendovi la prima equazione del sistema otteniamo
d2yi
dt2= −yj∂j∂iφ(x)
che è proprio la tesi.
Nella relatività generale tale accelerazione è data dalla equazione della deviazione geodetica (2.3.50):
aµ = Rµσλν vσvλyν
dove yν è il vettore di deviazione. Il confronto tra i due risultati suggerisce euristicamente la corrispon-denza
Rµσλµ vσvλ ←→ −∂µ∂µφ
D’altro canto l’equazione di Poisson con costante gravitazionale universale unitaria (G = 1) afferma che
∇2φ = 4πρ
dove ρ è la densità di massa/energia della materia; dato un tensore energia-momento Tµν , un osservatorecon quadrivelocità v misura la densità di energia
ρ = Tσλ vσvλ
ma ora osserviamo che ∂µ∂µφ = ∇2φ, perciò
−4πTσλ vσvλ = −∇2φ = −∂µ∂µφ←→ Rµσλµ = −Rσλ
che suggerisceRσλ = 4πTσλ (3.2.2)
equazione che fu postulata inizialmente da Einstein, che però si accorse subito di un problema serio, inquanto, come detto sopra, il tensore Tµν deve soddisfare la conservazione dell’energia ∇µTµν = 0. D’altraparte, sappiamo che
∇µGµν = ∇µ(Rµν − 1
2Rgµν
)= 0 =⇒ ∇µRµν −
1
2gµν ∇µR = 0
3.2. Relazione tra geometria nello spaziotempo e distribuzione di materia 61
avendo sfruttato il fatto che gµν è covariantemente costante; osservando tale equazione notiamo che∇µRµν = 4π∇µTµν = 0 per la (3.2.2) e per la conservazione dell’energia, ma allora
∇µR = 0 =⇒ T = Tµµ = k
cioè la curvatura scalare dovrebbe essere costante nell’universo, così come la quantità T . Tali restrizionisulla distribuzione della materia non sono fisiche, e, a maggior ragione, oggi sappiamo che l’universo siespande, e quindi la curvatura e la ρ sono cambiate. Einstein abbandonò la (3.2.2), e, spinto dal fattoche il tensore G fosse a divergenza nulla, considerò invece l’equazione
Gµν = 8πTµν (3.2.3)
Con la (3.2.3) non c’è più conflitto tra l’identità di Bianchi e la conservazione dell’energia, infatti
∇µGµν = 0 =⇒ 8π∇µTµν = 0
anzi, la conservazione dell’energia è conseguenza dell’identità di Bianchi.
Apriamo ora una piccola parentesi di elettrodinamica: le equazioni di Maxwell sono
∂µFµν = 4πjν
e le identità di Bianchi implicano che Fµν = ∂µAν − ∂νAµ; ma dall’equazioni di Maxwell
0 = ∂ν∂µFµν = 4π ∂νj
ν =⇒ ∂νjν = 0
che è la conservazione della carica; notiamo che ∂ν∂µFµν = 0 perchè è la contrazione di un terminesimmetrico, ∂ν∂µ, e di uno antisimmetrico, Fµν .
Valgono ancora le corrispondenze utilizzate per ottenere la (3.2.2)? La traccia1 della (3.2.3) è
R− 1
2R · 4 = 8πT =⇒ R = −8πT
che, sostituito nella (3.2.3), porta a
Rµν = 8π
(Tµν −
1
2gµνT
)(3.2.4)
In situazioni in cui la teoria newtoniana è applicabile, l’energia della materia, misurata da un osservatoreche è in buona approssimazione in quiete rispetto alle masse, è molto più grande degli sforzi materiali,ovvero
T = Tµµ ≈ T 00 = −ρ = −Tσλ vσvλ
ma la (3.2.4) implica
Rµν vµvν = 8πTµν v
µvν − 4πgµν vµvν T = 4πTµν v
µvν
essendo gµνvµvν = −1 ed avendo sostituito a T la sua espressione approssimata. Le (3.2.3) sono le
equazioni di Einstein della relatività generale (1915). L’intero contenuto della relatività generale puòessere riassunto nel modo seguente:
• lo spaziotempo è una varietà differenziabile munita di una metrica gµν lorentziana;
• la curvatura di g è legata alla distribuzione di materia dalle (3.2.3).
In sintesi, “la materia dice allo spaziotempo come curvarsi”; d’altra parte, nelle varietà curve le particellesi muovono lungo delle geodetiche, vedi (2.3.37), cioè “lo spaziotempo dice alla materia come muoversi”.
1la traccia di gµν è gµν gµν = 4.
62 Capitolo 3. Le equazioni di Einstein
3.3 Gravità linearizzataL’obiettivo che ci prefiggiamo ora è vedere se in approssimazione di spazio piatto si trovano le equazioni“classiche”; consideriamo a questo proposito gµν come piccola perturbazione della metrica di Minkowski
gµν = ηµν + hµν =⇒ gµν = ηµν − hµν
avendo alzato ed abbassato gli indici con η e con |hµν | << 1; notiamo infatti che
gµν gρν =(ηµν − hµν)(ηρν + hρν) = δµρ + ϑ(h2)
Scriviamo quindi la formula per
• i simboli di Christoffel:
Γµνρ =1
2gµλ(gρλ,ν + gλν,ρ − gνρ,λ) =
1
2ηµλ(hρλ,ν + hλν,ρ − hνρ,λ) + ϑ(h2)
• per il tensore di Riemann, sfruttando il fatto che
Rσρµν = ∂µΓσνρ − ∂νΓσµρ + ϑ(h2)
perciò:
Rαµβν =1
2(hαν,µβ + hµβ,να − hµν,αβ − hαβ,µν)
• per il tensore di Ricci:
Rµν = Rβµβν =1
2
(hβν,µβ + h β
µβ,ν − hβ
µν, β − hββ,µν
)
• per la curvatura:
R = Rνν =1
2
(hβ ν
ν, β + hν ββ,ν − h
ν βν, β − h
β νβ, ν
)= hβ ν
ν, β − hν βν, β
Introduciamo ora la quantità
hαβ := hαβ −1
2ηαβ h
σσ =⇒ hββ = hββ −
1
24h σ
σ = −hββ
Ma allora possiamo ricavare il tensore h da h:
hαβ = hαβ +1
2ηαβ h
σσ =⇒ hαβ = hαβ −
1
2ηαβ h
σσ
A questo punto possiamo calcolare il tensore di Einstein:
Gµν = Rµν−1
2Rgµν = Rµν−
1
2Rηµν+ϑ(h2) =
1
2
(hβν,µβ + h β
µβ,ν − hβ
µν, β − hββ,µν
)−1
2ηµν
(hβ ν
ν, β − hν βν, β
)
avendo sfruttato il fatto che R = ϑ(h); ora sia h := h σσ , per cui
Gµν =1
2
(hβν,µβ −
1
2ηβν h,µβ + h β
µβ,ν −1
2ηµβ h
β,ν − h β
µν, β +1
2ηµν h
β, β − h
ββ,µν +
1
2ηββ h,µν
)+
− 1
2ηµν
(hβ ρ
ρ, β −1
2ηβρ h
ρ, β − h
ρ βρ, β +
1
2ηρρ h
β, β
)
Semplificando l’espressione si trova che
Gµν =1
2
(hβν,µβ + h β
µβ,ν − hβ
µν, β − ηµν hβ ρρ, β
)(3.3.1)
3.3. Gravità linearizzata 63
Apriamo ora una parentesi sulle trasformazioni di gauge, e consideriamo una trasformazione dicoordinate infinitesima
xµ 7→ x′µ = xµ + ξµ(x)
Ricordando quanto visto con i vettori di Killing, sappiamo che
che è analogo a A′µ = Aµ − ∂µχ, solo che ξ è un oggetto ad un indice da simmetrizzare, poichè h ed h′sono oggetti simmetrici.
Esercizio 3.1. Dimostrare che queste trasformazioni lasciano invarianti il tensore di Riemann, così comele trasformazioni di gauge lasciano invariato il tensore di Faraday.
Andiamo a ricavare l’espressione di h′µν dalla (3.3.2):
h′µν = h′µν −1
2ηµν h
′ σσ = hµν − ∂νξµ − ∂µξν −
1
2ηµν(h
σσ − 2∂σξ
σ)
da cui deriva cheh′µν = hµν − ∂νξµ − ∂µξν + ηµν ∂σξ
σ
Proposizione 3.3.1. Definito il gauge di Lorentz come la condizione
∂µh′µν = 0 (3.3.3)
allora è sempre possibile trovare una trasformazione di gauge in modo tale che h′µν soddisfi la (3.3.3).
si ottiene perciò l’equazione differenziale2ξν = ∂µhµν (3.3.4)
che ammette sempre soluzione.
64 Capitolo 3. Le equazioni di Einstein
Chiusa la parentesi sulle trasformazioni di gauge, sostituendo la (3.3.4) nella (3.3.1) otteniamo
Gµν = −1
22hµν = 8πTµν
che implica2hµν = −16πTµν (3.3.5)
che sono le equazioni di Einstein linearizzate nel gauge di Lorentz, e vengono anche dette equazioni diPauli-Fierz. Nel caso non ci siano sorgenti, per cui Tµν = 0 si ottiene l’equazione di d’Alembert
2hµν = 0
la cui soluzione particolare è l’onda gravitazionale piana
hµν = eµν eikαx
α
(3.3.6)
dove eµν è un tensore simmetrico e costante, kα = (ω,k) è il quadrivettore d’onda costante, dove k èil solito vettore d’onda tridimensionale, e vale che1 kα kα = 0, cioè kα è un vettore di tipo luce, il chesignifica che le onde gravitazionali si propagano alla velocità della luce. I fronti d’onda sono dati da
kµxµ = t
dove t è una costante, e, senza perdere di generalità, supponiamo che l’onda propaghi in direzione z, percui k1 = 0 = k2:
kµxµ = k0x
0 + k3x3 = t
differenziando
−ω dt+ k3 dx3 = 0 =⇒ dx3
dt=
ω
k3=: vf
dove vf è la velocità di fase dell’onda; in generale
vf =ω
|k|
Ci ricordiamo però che
kµkµ = −
(k0)2
+(k3)2
= 0 =⇒ k3 = ±k0 =⇒ vf = ±1 = ±c
La soluzione dell’equazione di Pauli-Fierz per una fissata sorgente Tµν(x) è ottenuta tramite la funzionedi Green definita da
2Gµν(x) = −16πηµν δ(4)(x) (3.3.7)
Verifichiamo che effettivamente sia soluzione
hµν(x) =
∫d4x′ Gµρ(x− x′)T ρν (x) =⇒ 2xhµν(x) =
∫d4x′ 2xGµρ(x− x′)︸ ︷︷ ︸
−16πηµρ δ(4)(x−x′)
T ρν (x) = −16πTµν(x)
1basta sostituire la (3.3.6) nella (3.3.5) omogenea.
3.4. Il limite newtoniano della relatività generale 65
3.4 Il limite newtoniano della relatività generaleUno dei test cruciali della relatività generale è costituito dal fatto che deve ridursi alla teoria newtonianaquando la gravità è debole, il moto delle sorgenti avviene a velocità in modulo molto minori di c egli sforzi materiali sono molto più piccoli della densità di energia1. Nel caso di gravità debole, valel’approssimazione lineare della relatività generale, mentre le ipotesi sulle sorgenti possono essere formulatenel modo seguente: esiste un sistema di coordinate globale ed inerziale in modo tale che
Tµν ≈ ρ uµuν con u = ∂t
Allora varrà che Tti ≈ 0 perchè le velocità, e quindi le densità di momento, sono piccole, e che Tij ≈ 0,perchè gli sforzi sono piccoli. Siccome le sorgenti variano lentamente, la geometria dello spaziotempocambia poco col tempo, per cui trascuriamo le derivate temporali di hµν . Le equazioni di Pauli-Fierzdiventano
∆hij = 0 = ∆hit ∆htt = −16πρ (3.4.1)
dove ∆ = ∂i ∂i; l’unica soluzione di ∆hij = 0 regolare all’infinito è hij = 0.
Esercizio 3.2. Dimostrare che la soluzione hij = k con k costante può essere eliminata da una trasfor-mazione delle coordinate.
Allo stesso modo hit = 0; rimane solo quella non banale, per cui, ricordando che h tt = −htt, si ha
hµν = hµν −1
2ηµν h
σσ =⇒
htt = htt −1
2htt =
1
2htt
hij = hij +1
2δij htt =
1
2δij htt
perciò, definendo φ := −1
4htt:
hµν = −(4uµuν + 2ηµν)φ
Si ottiene perciò l’equazione di Poisson classica, sostituendo φ in ∆htt = −16πρ:
∆φ = 4πρ
Consideriamo ora il moto di un corpo “test”, ovvero tale da poter trascurare la sua curvatura dellospaziotempo, nello spaziotempo curvo dotato della metrica
gµν = ηµν + hµν
L’equazione delle geodetiche è data dalla (2.3.37):
d2xµ
dτ2+ Γµρσ
dxρ
dτ
dxσ
dτ= 0
In approssimazione classica, ovvero |v| << c, avremo che2 (xρ) ≈ (1, 0, 0, 0) e τ ≈ t, γ → 1, perciòdall’equazione delle geodetiche segue che
d2xµ
dt2= −Γµtt = −1
2ηµα(hαt,t + hαt,t − htt,α)
avendo usato la (2.3.33); poichè le sorgenti si muovono lentamente trascuriamo hαt,t e htt,t, perciò rimanesolamente
Γµtt = −1
2ηµi htt,i =⇒
Γttt = 0
Γitt = −1
2htt,i =
∂φ
∂xi
Dunque l’equazione delle geodetiche diventa l’equazione di Newton
d2xi
dt2= − ∂φ
∂xi(3.4.2)
1sempre usando unità in cui c = 1.2indicando con x la derivata di x rispetto a τ .
66 Capitolo 3. Le equazioni di Einstein
3.5 La soluzione di SchwarzschildCi poniamo ora il problema1 di trovare la geometria dello spaziotempo all’esterno di una distribuzione dimassa statica2 e sfericamente distribuita. Perchè è importante trovare questa geometria? I motivi sonodue:
i) costituisce un test classico della relatività generale tramite i campi gravitazionali nel nostro siste-ma solare, assieme alla precessione delle orbite dei pianeti, alla deviazione della luce, al redshiftgravitazionale, alla dilatazione del tempo, etc.;
ii) i corpi sufficientemente massivi sono instabili, e subiscono un collasso gravitazionale che porta allaformazione di buchi neri. Dopo un collasso di un corpo con simmetria sferica, l’intera geometriadello spaziotempo è descritta dalla soluzione di Schwarzschild, che quindi ci insegna molto nel limitedella relatività generale in cui i campi gravitazionali sono forti.
Il fatto che una stella collassi in un punto causa il fallimento della descrizione della gravità attuale: ciòci dice che c’è bisogno di una formulazione nuova, quantistica, della gravità, così come la fisica classicanon era in grado di descrivere perchè l’atomo non collassi su se stesso.
3.5.1 Derivazione della soluzione di SchwarzschildVogliamo trovare tutte le metriche statiche e sfericamente simmetriche che soddisfino Rµν = 0, in quantonel vuoto
Gµν = 0 =⇒ Rµν −1
2Rgµν = 0 =⇒ R− 1
2R 4 = 0 =⇒ R = 0 =⇒ Rµν = 0
Prima però dobbiamo definire più precisamente il significato di “statico” e “sfericamente simmetrico”.
Definizione 3.1. Uno spaziotempo viene chiamato stazionario se possiede un vettore di Killing ξ ditipo tempo; si dimostra che tale condizione è equivalente a richiedere l’esistenza di un gruppo ad unparametro di isometrie φt le cui orbite (cioè l’insieme dei punti che risultano quando il gruppo agisce sudi un dato punto) siano curve di tipo tempo.
Figura 3.1: il vettore ξ di tipo tempo esprime la simmetria dello spaziotempo sotto traslazioni temporali.
Definizione 3.2. Uno spaziotempo è statico se è stazionario e se esiste inoltre un’ipersuperficie Σortogonale alle orbite dell’isometria, ovvero quelle lungo cui c’è invarianza sotto traslazione temporale.
Si possono introdurre delle coordinate convenienti per spazitempi statici nel modo seguente: se ξ 6= 0ovunque su Σ, ogni punto p in un intorno di Σ (quindi su Σ) giace su di un’unica orbita di ξ che passaper Σ.Scegliamo delle coordinate arbitrarie xi, i = 1, 2, 3 per ξ ed assegnamo al punto p le coordinate
(t, xi
)
dove t è il parametro dell’orbita che parte da Σ e finisce in p, e xi sono le coordinate dell’intersezionedell’orbita con Σ.
1risolto da Karl Schwarzschild nel 1916.2ovvero non rotante, non pulsante ed in quiete.
3.5. La soluzione di Schwarzschild 67
Poichè ξ = ∂t è vettore di Killing, le componenti della metrica in questo sistema di coordinate sonoindipendenti da t. Inoltre, siccome la superficie Σt, definita come l’insieme dei punti di coordinatatemporale t, è la immagine di Σ sotto l’isometria φt, segue che ogni Σt è ortogonale a ξ, per cui la metricaha la forma
ds2 = −V(x1, x2, x3
)dt2 +
3∑
i,j=1
hij(x1, x2, x3
)dxidxj (3.5.1)
Figura 3.2: rappresentazione della situazione descritta.
Osservazione 3.1. Notiamo che ds2 non dipende da t poichè ξ non dipende da t e che non vi sonotermini misti dtdxi in quanto ξ ⊥ Σ.
Definizione 3.3. Uno spaziotempo viene chiamato sfericamente simmetrico se il suo gruppo diisometrie contiene un sottogruppo SO(3) e se le orbite di questo sottogruppo sono delle 2-sfere.
Osservazione 3.2. Lo spaziotempo di Schwarzschild ammette 4 vettori di Killing, che sono ∂t e i tregeneratori di SO(3).
La metrica dello spaziotempo induce una metrica su ciascuna di queste 2-sfere. A causa della simmetriarotazionale, questa metrica deve essere un multiplo della metrica sulla S2 con raggio 1, cioè si può scrivere
ds2 = r2(dϑ2 + sin2ϑ dϕ2
)
Osservazione 3.3. La coordinata r non ha necessariamente il significato di una distanza della superficiedella sfera dal centro, poichè il centro può non esistere, ad esempio con una topologia R × S2, vedasi lafigura sottostante; nonostante ciò, chiamiamo coordinata radiale la quantità r.
Figura 3.3: cilindro dato da R× S2.
Se lo spaziotempo è statico e a simmetria sferica, e se il vettore di Killing di tipo tempo ξ è unico, ξdev’essere ortogonale alle 2-sfere introdotte sopra perchè, essendo unico, ξ deve essere invariante sottole simmetrie rotazionali, per cui la proiezione su ogni S2 dev’essere zero. Per questo motivo le 2-sferegiacciono interamente sulla superficie Σt; scegliendo le coordinate (r, ϑ, ϕ) su Σ, la metrica assume laforma
ds2 = −f(r) dt2 + h(r) dr2 + r2(dϑ2 + sin2ϑdϕ2
)(3.5.2)
68 Capitolo 3. Le equazioni di Einstein
Esercizio 3.3. Calcolare Rµν per la metrica (3.5.2).
A partire dalla (3.5.2), le equazioni di Einstein diventano:
Rµν = 0 =⇒
Rtt = 0 =⇒ 1
2(fh)
− 12
d
dr
[(fh)
− 12
df
dr
]+
1
rfh
df
dr= 0
Rrr = 0 =⇒ −1
2(fh)
− 12
d
dr
[(fh)
− 12
df
dr
]+
1
rh2
dh
dr= 0
Rϑϑ = 0 =⇒ −1
2
1
rfh
df
dr+
1
2
1
rh2
dh
dr+
1
r2
(1− 1
h
)= 0
Rµν = 0 se µ 6= ν
Rϕϕ = 0 =⇒ Rϑϑ = 0
Indicando con f =df
dr, si ha, sommando le prime due equazioni:
f
f+h
h= 0 =⇒ f =
k
h
dove k è una costante che può essere posta pari ad 1 riscalando t 7→ k−32 t. Con h = f−1 la terza equazione
diventa
−1
2
f
r+
1
2rf2
(− 1
f2
)f +
1
r2(1− f) = 0 =⇒ −f +
1− fr
= 0
cioèd
dr(rf) = 1 =⇒ f = 1 +
c
r
dove c è una costante; tale equazione, assieme ad h = f−1 soddisfa tutte le equazioni del sistema.Sostituendo quanto trovato per f ed h nella (3.5.2) si trova
ds2 = −(
1 +c
r
)dt2 +
(1 +
c
r
)−1
dr2 + r2(dϑ2 + sin2ϑdϕ
)(3.5.3)
che è la soluzione di Schwarzschild.
Osservazione 3.4. Con r → +∞ la metrica (3.5.3) è piatta, perciò si dice che la metrica di Schwarzschildè asintoticamente piatta. Questo ci permette di interpretare tale metrica come campo gravitazionaleall’esterno di un corpo isolato.
Vale il
Teorema 3.5.1. Ogni soluzione dell’equazione di Einstein nel vuoto, con simmetria sferica, è statica(Teorema di Birkhoff).
Osservazione 3.5. Il teorema di Birkhoff implica che la soluzione è quella di Schwarzschild anche senzafare l’ipotesi di staticità. Inoltre, la costante c può essere determinata paragonando il moto di un corpo“test” nel regime in cui il campo gravitazionale è debole (r → +∞) col moto della teoria newtoniana, percui |v| << c, τ ≈ t: l’equazione delle geodetiche era, secondo la (3.4.2):
d2xi
dt2= − ∂φ
∂xiφ = −M
r
da paragonare cond2xα
dt2= −Γαtt
perciò imponiamo che
Γitt = −∂iM
r
3.5. La soluzione di Schwarzschild 69
Ma Γitt = giα Γαtt ≈ ηiα Γαtt poichè la metrica è quasi piatta con r → +∞, perciò
Γitt = Γitt =1
2(git,t + git,t − gtt,i) = −1
2∂igtt = −∂i
M
r=⇒ gtt =
2M
r+ c
dove c è una costante, ma sappiamo che
gtt −−−−−→r→+∞
−1 =⇒ c = −1 =⇒ gtt = −(
1− 2M
r
)= −
(1 +
c
r
)
perciò nel limite newtoniano c = −2M . Per r = 2M abbiamo una singolarità nella metrica1. Nel casodel Sole 2M ∼ 3 km, molto all’interno del Sole, dove Tµν 6= 0, cioè non accade quanto abbiamo descrittofin’ora.
3.5.2 Geodetiche della geometria di Schwarzschild
Per studiare il comportamento di raggi di luce e di corpi massicci nel campo gravitazionale all’esternodi una distribuzione di massa a simmetria sferica dobbiamo determinare le geodetiche della metricadi Schwarzschild. Questo compito diventa abbastanza facile se facciamo uso delle simmetrie dellospaziotempo. Se ξ è Killing e se u è il vettore tangente ad una geodetica, ξ · u è costante lungo lageodetica:
∇u(ξ · u) = 0 ξ = ∂t ξ · u =: −ELa quantità ξ · u viene assunta come “energia per unità di massa”, e si conserva lungo la geodetica inquanto asintoticamente, per r →∞, la metrica di Schwarzschild tende a quella di Minkowski, perciò
−ξ · u = −ξα ηαβ uβ = −ξ0 η00 u0 = u0 =
p0
m=E
m
essendo ξ0 = 1 e η00 = −1; se ξ = ∂ϕ allora ξ ·u =: L è il “momento angolare per unità di massa”, infatti,per r →∞
ξ · u = ξα gαβ uβ = ξφ gφφ u
φ = r2 sin2ϑuφ =1
mr2 sin2ϑ pφ
essendo ξφ = 1 e Lz = r2 sin2ϑ φ = pφ = xpy − ypx in coordinate sferiche. Inoltre
gµν uµuν = −κ =
−1 per geodetiche di tipo tempo
0 per geodetiche di tipo lucee uµ =
dxµ
dτ= xµ
come al solito τ è il parametro affine per geodetiche nulle e il tempo proprio per quelle di tipo tempo.Perciò avremo
− κ = −(
1− 2M
r
)t2 +
(1− 2M
r
)−1
r2 + r2ϑ2 + r2 sin2ϑ φ2 (3.5.4)
A causa della simmetria ϑ 7→ π − ϑ della metrica di Schwarzschild, l’intera geodetica giace nel “pianoequatoriale” ϑ = π/2, se il punto iniziale ed il vettore tangente iniziale giacciono in questo “piano”.Dato il punto iniziale ed il vettore tangente iniziale, la geodetica è univocamente determinata; se lageodetica passante per p e tangente ad u uscisse dal piano equatoriale, ve ne sarebbe un’altra speculareper simmetria - come raffigurato nel disegno - quindi non sarebbe determinata univocamente, e perciò lageodetica rimane nel piano. Inoltre, ogni geodetica può essere portata ad una geodetica inizialmente (equindi sempre) equatoriale tramite una rotazione, perciò possiamo limitarci al caso ϑ = π/2, per cui si la(3.5.4) diventa
−κ = −(
1− 2M
r
)t2 +
(1− 2M
r
)−1
r2 + r2φ2
1ricordiamo che le dimensioni di M sono metri in quanto la costante gravitazionale è stata fissata ad 1.
70 Capitolo 3. Le equazioni di Einstein
Figura 3.4: rappresentazione della situazione descritta.
Ora usiamo le grandezze conservate, che abbiamo chiamato E ed L:
E = −gµν ξµuν con ξ = ∂t =⇒ E = −gttut =
(1− 2M
r
)t
L = gµν ξµuν con ξ = ∂φ =⇒ L = gφφu
φ = r2φ
perciò
−κ = − E2
1− 2M
r
+r2
1− 2M
r
+L2
r2
da cuiE2
2=r2
2+
1
2
(1− 2M
r
)(L2
r2+ κ
)(3.5.5)
cioè il moto radiale della geodetica è quello di una particella non relativistica di massa 1 ed energia E2/2in un potenziale efficace
V =κ2− κ
M
r+L2
2r2− ML2
r3(3.5.6)
dove il termine proporzionale adM/r ricorda il potenziale Newtoniano, quello L2/2r2 è il solito potenzialecentrifugo e ML2/r3 è una correzione relativistica. Cerchiamo ora gli estremanti per V :
i) caso geodetiche di tipo tempo, per cui κ = 1
0 =∂V
∂r= r−4
(Mr2 − L2r + 3ML2
)= 0 =⇒ r± =
L2 ±√L4 − 12L2M2
2M
perciò se L2 < 12M2 non ci sono estremi, mentre se L2 > 12M2 si ha che r+ è un minimo, mentrer− è un massimo del potenziale, cui corrisponde un’orbita circolare instabile non esistente nellateoria newtoniana.
ii) nel gaso di geodetiche nulle, κ = 0: il potenziale efficace è
V (r) =L2
2r3(r − 2M)
che ha un massimo in r = 3M pari a V (3M) =L2
54M2.
3.5. La soluzione di Schwarzschild 71
Ecco rappresentati i tre casi visti: a partire dall’alto, i primi due grafici si riferiscono al caso κ = 1 conrispettivamente L2 < 12M2 e L2 > 12M2, mentre il terzo si riferisce al caso κ = 0.
72 Capitolo 3. Le equazioni di Einstein
3.6 I test classici della relatività generale
3.6.1 Deviazione della luce
La traiettoria della luce è per definizione data dalle geodetiche nulle; in particolare avremo che i fotonivengono catturati qualora si realizzi la condizione che
E2
2>
L2
54M2=⇒ L2
E2< 27M2
Se invece varrà cheE2
2<
L2
54M2
allora il fotone entrante raggiunge un raggio minimo r0 e si allontana di nuovo all’infinito, e sarà proprioquesto il fenomeno di nostro interesse. Definiamo a tal proposito la quantità
b :=L
E
che prende il nome di parametro d’impatto apparente1. La distanza minima r0 soddisfa
E2
2= V (r0) =
L2
2r30
(r0 − 2M) =⇒ r30 − b2(r0 − 2M) = 0
Figura 3.1: deflessione di un raggio di luce causata dalla curvatura dello spaziotempo.
Andiamo a calcolare δφ:dφ
dr=φ
r=L
r2
[E2 − L2
r3(r − 2M)
]− 12
(3.6.1)
che è un’equazione differenziale piuttosto complicata, che risolveremo perturbativamente.1nel caso di spaziotempo piatto, b sarebbe il parametro d’impatto, ovvero la distanza minima dall’origine r = 0. Nella
geometria curva, b non rappresenta più tale quantità.
3.6. I test classici della relatività generale 73
Osservazione 3.6. Definitay :=
M
2r− 1
12l’equazione differenziale (3.6.1) diventa
(dy
dφ
)2
= 4y3 − g2 y − g3
dove g2 = 1/12, g3 = 1/216 −M2/4b2: la soluzione di questa nuova equazione è una funzione y(φ) cheprende il nome di funzione ellittica di Weierstrass, ed y viene indicata con P(φ), mentre g2 e g3 sonodetti invarianti ellittici .
Definita u = r−1, vale chedφ
dr= − 1
r2
dφ
du, perciò
du
dφ= − 1
L
(E2 − L2u2 + 2ML2u3
) 12 =⇒ [u′(φ)]
2= b−2 − u2 + 2Mu3 =⇒ 2u′u′′ = −2uu′ + 6Mu2u′
da cuiu′′ + u = 3Mu2 (3.6.2)
Nello spaziotempo piatto M = 0, i raggi di luce sono delle rette, infatti dalla (3.6.2) si ottiene che
u′′0 + u0 = 0 =⇒ u0 = C sin(φ− φ0)
Con r → ∞ allora u0 = 0, perciò φ = φ0 ∨ φ = φ0 + π. Per il valore massimo di u0, coincidente conφ = φ0 + π/2, si avrà la distanza minima dall’origine, per cui
r = r0 = b =⇒ 1
b= C
Per ottenere una soluzione approssimativa della (3.6.2) poniamo u = u0 + δu dove δu = ϑ(M/b2
);
sostituendo otteniamo
u′′0 + δu′′ + u0 + δu′′ = 3M[u2
0 + 2u0 δu+(δu)2]
=⇒ δu′′ + δu = 3Mu20 =
3M
b2sin2(φ− φ0)
essendoci serviti del fatto che u0 soddisfa la (3.6.2) con M = 0 e che 2u0 δu+(δu)2 è trascurabile rispetto
ad u20, poichè tale quadrato è moltiplicato per M e δu = ϑ(M). Scegliendo φ0 = 0 la soluzione è data da
δu =M
b2(1 + cosφ)
2=⇒ u =
1
b
[sinφ+
M
b(1 + cosφ)
2+ ϑ
(M2
b2
)]
Nel caso del Sole1 2M ' 3 km; ciò che ci interessa trovare sono gli angoli per cui u = 0, ovvero r →∞, eciò avviene banalmente per φ = π, ma anche per
sinφ+M
b(1 + cosφ)
2= 0
Sappiamo che per M = 0 il secondo angolo è φ = 0, perciò poniamo φ = 0 + δφ, sempre con φ = ϑ
(M
b
)
≈δφ︷ ︸︸ ︷sin(δφ) +
M
b
[1 +
≈1︷ ︸︸ ︷cos(δφ)
]2= 0
perciò
δφ = −4M
b(3.6.3)
Per un raggio di luce che passa vicino alla superficie del Sole si ha che |δφ| ∼ 1.75′′; tale deflessione fumisurata da Eddington nel 1920 con circa il 10% d’errore, il che fa sospettare di un ritocco alla misura.La deviazione di onde radio provenienti dai quasar conferma la (3.6.3) con la precisione dell’1%, misuredi Fomalont e Sramek effettuate nel 1976.
1nel sistema solare M/b << 1; infatti, anche scegliendo il b minimo, dato dal raggio corrispondente alla superficie delSole, cioè circa 7 · 105 km, si ottiene un valore M/b ≈ 10−7.
74 Capitolo 3. Le equazioni di Einstein
Figura 3.2: deflessione di un raggio di luce passante vicino alla superficie solare.
3.6.2 Precessione del perielio
Consideriamo il caso di κ = 1 e detta u = 1/r, calcoliamo
r4
(du
dφ
)2
=
(dr
dφ
)2
=r2
φ2=E2 − 1 +
2M
r− L2
r2+
2ML2
r3
L2
r4
Allora avremo che(
du
dφ
)2
=1
b2− 1
L2+
2M
L2u− u2 + 2Mu3 =⇒ 2u′u′′ =
2M
L2u′ − 2uu′ + 6Mu2u′
da cui
u′′ + u =M
L2+ 3Mu2 (3.6.4)
Notiamo la presenza del termine aggiuntivo 3Mu2 rispetto alla teoria Newtoniana, per cui invece valeva
u′′0 + u0 =M
L2=⇒ u0 =
M
L2(1 + ε cosφ)
e le cui soluzioni dell’equazione differenziale sono coniche. Andiamo a risolvere la (3.6.4) perturbativa-mente1 usando lo stesso metodo impiegato per la (3.6.2), cioè sostituiamo la soluzione Newtoniana neltermine quadratico in u: otteniamo perciò
u′′ + u =M
L2+ 3Mu2
0 =M
L2+
3M3
L4(1 + ε cosφ)
2
che, risolta, porta a
u = u0 +3M3
L4
[1 + εφ sinφ+ ε2
(1
2− cos2φ
6
)](3.6.5)
Il termine più importante della (3.6.5) è quello proporzionale a φ sinφ, che è illimitato, perciò trascuriamole altre correzioni ed otteniamo
u =M
L2
[1 + ε cosφ+
3M2
L2φε sinφ
]≈ M
L2
1 + ε cos
[(1− 3M2
L2
)φ
]
1questa soluzione è valida per M << 1.
3.6. I test classici della relatività generale 75
che è ancora una soluzione periodica, ma non con periodo 2π; per fare l’approssimazione è necessario chesia M/L << 1. Calcoliamo il periodo di u:
(1− 3M2
L2
)φ = 2π =⇒ φ =
2π
1− 3M2
L2
≈ 2π
(1 +
3M2
L2
)
perciò
∆φ =6πM2
L2(3.6.6)
Figura 3.3: schematizzazione della precessione del perielio.
Nella teoria Newtoniana il semiasse maggiore è dato da
a =L2
M(1− ε2)
Tale valore può essere utilizzato in approssimazione di campo gravitazionale debole, quindi è sufficiente-mente precisa per i nostri fini: sostituendo nella (3.6.6) otteniamo
∆φ =6πM
a(1− ε2)
Vediamo dunque che ∆φ è grande se ε è grande ed a è piccolo, che è proprio il caso di Mercurio, per cui∆φ è dell’ordine di grandezza del raggio di Schwarzschild del Sole (∼ 103m) diviso per il raggio dell’orbita(∼ 109 m). Per Mercurio si ha che
a ≈ 58 · 106 km M = M = 1.48 km ε ≈ 0.2δφteo
T= 0.1′′
dove T ∼ 0.24 anni è il periodo di rivoluzione di Mercurio. Si ottiene quindi che ∆φteo(100 anni) = 43′′;il valore osservato togliendo gli effetti degli altri pianeti, compresa la precessione dell’asse terrestre è∆φmis(100 anni) = 42.56′′, e tale misura risale a prima della formulazione della relatività generale.
Vediamo ora un metodo alternativo per ottenere informazioni sulla precessione: avevamo visto cheesistevano due estremanti per il potenziale efficace, r±, dati da
r± =L2 ±
√L4 − 12L2M2
2M
76 Capitolo 3. Le equazioni di Einstein
e che nel caso di κ = 1 e L2 > 12M2, r+ era un minimo, per cui esiste un’orbita stabile per tale valore dir. Ciò che ora facciamo è considerare piccole oscillazioni intorno a tale minimo, ottenendo così un motoarmonico con frequenza radiale data da
ω2r =
d2V
dr2
∣∣∣∣r+
=M(r+ − 6M)
r3+(r+ − 3M)
(3.6.7)
dove è stata usata l’espressione di r± per eliminare L2. D’altra parte, la frequenza angolare è data da
ω2φ = φ2 =
L2
r4+
avendo supposto un’orbita quasi circolare; perciò
ω2φ =
M
r2+(r+ − 3M)
(3.6.8)
Nel limite Newtoniano r+ >> M , perciò
ωr ≈ ωφ(
=
√M
r3+
←− 3a legge di Keplero
)
ωr = ωφ significherebbe che un pianeta torna ad un dato valore di r esattamente dopo un periodo orbitale,cioè le orbite si chiuderebbero; apriamo una piccola parentesi su questo fatto, sottolineando che le orbitesi chiudono se e solo se la quantità A, detta vettore di Runge-Lenz e definita come
A := p× L−mM r
r
si conserva. Si dimostra infatti che A punta verso il perielio, e quindi se è costante non si verificaprecessione; si dimostra anche che A = 0 è caratteristico di un potenziale proporzionale ad 1/r.
In generale ωr 6= ωφ, cioè le orbite non si chiudono e il perielio precede con frequenza di precessione datada, detto ∆τ il periodo radiale:
ωp =∆φ
∆τ=ωφ∆τ − 2π
∆τ= ωφ − ωr
perciò
ωp = −[√
1− 6M
r+− 1
]ωφ (3.6.9)
3.6.3 Dilatazione del tempoConsideriamo due osservatori statici O1, per cui r = r1, ed O2, per cui r = r2 → ∞, entrambi con irelativi (r, ϑ, ϕ) costanti; per loro varrà
ds2 = −(
1− 2M
r
)dt2 = −dτ2 (3.6.10)
dove τ è il tempo proprio dei due osservatori, dato da
dτ =
√1− 2M
rdt
Per O2 avremo dunque che
∆τ =
t2∫
t1
dt = t2 − t1 = ∆t
3.6. I test classici della relatività generale 77
mentre per O1 varrà che
∆τ =
t2∫
t1
√1− 2M
r1dt =
√1− 2M
r1∆t < ∆t
cioè per O1 il tempo scorre più lentamente; inoltre notiamo che con r1 → 2M si ha ∆τ → 0, cioèsull’orizzonte degli eventi di un buco nero il tempo si ferma! Abbiamo visto dunque che a distanze diverseda un corpo massivo il tempo scorre a velocità diversa, ed è proprio questa l’accortezza da utilizzare perinviare i satelliti GPS a 2 · 107 m d’altezza: essi sono infatti dotati di orologi atomici settati ad unafrequenza minore del secondo, così che in orbita tornino “a posto”.
3.6.4 Redshift gravitazionaleConsideriamo due osservatori statici, cioè tali che la loro quadrivelocità sia parallela a ∂t vettore diKilling1, O1, O2 con quadrivelocità rispettivamente u1 ed u2. Supponiamo che O1, situato in p1, mandiun segnale di luce ad O2, che lo riceve in p2.
Figura 3.4: rappresentazione della situazione descritta.
La frequenza di emissione sarà data daω1 = −kµuµ1
∣∣∣p1
mentre quella misurata da O2 saràω2 = −kµuµ2
∣∣∣p2
Poichè u2i = −1 (i = 1, 2) e ui ‖ ∂t =: ξ allora
uµi =ξµ√−ξ2
∣∣∣∣∣pi
inoltre, poichè ξ è vettore di Killing e k è tangente ad una geodetica, varrà che
ω1
ω2=
√−ξ2
∣∣∣p2√
−ξ2∣∣∣p1
ma−ξ2 = −gµν ξµ ξν = −gtt ξt ξt = −gtt = 1− 2M
r1questa condizione è equivalente a richiedere(r, ϑ, ϕ) costanti.
78 Capitolo 3. Le equazioni di Einstein
essendo ξ = ∂t; perciò
ω1
ω2=
1− 2M
r2
1− 2M
r1
12
(3.6.11)
avendo indicato con ri la coordinata radiale di Oi. Notiamo che se r2 > r1 allora ω2 < ω1, cioè lafrequenza diminuisce all’aumentare della distanza da un corpo massivo; sapendo che l’energia di un fotoneè E = ~ω, questo fatto si poteva prevedere intuitivamente considerando che il fotone risalendo il potenzialegravitazionale perde energia. Supponiamo ora cheM << r1,2, cioè ci poniamo nell’approssimazione limiteTerra-Sole, e andiamo a sviluppare la (3.6.11):
∆ω
ω≈ −M
r1+M
r2=⇒ ~∆ω ≈ ~ω
(−Mr1
+M
r2
)
dove si nota il termine pari alla solita differenza di potenziale Newtoniana. Tale variazione dell’energia diun fotone è stata verificata da Pound e Rebka nel 1960, usando l’effetto Mössbauer per misurare la ∆ωdi fotoni che “cadono giù” da una torre. Si ebbe così la conferma della predizione della relatività generalecon un’incertezza dell’1%.
3.7 L’estensione di Kruskal del buco nero di SchwarzschildRiscriviamo la metrica di Schwarzschild (3.5.3)
ds2 = −V (r) dt2 +dr2
V (r)+ r2
(dϑ2 + sin2ϑ+ dϕ2
)
dove V (r) = 1− 2M
r; tale metrica presenta delle singolarità in:
i) r = 0: singolarità essenziale di curvatura, infatti si ha che gli invarianti di curvatura, che nondipendono dalle coordinate in quanto trasformano come scalari, ivi divergono, come, ad esempio,Rµνρσ R
µνρσ ∼ r−6;
ii) r = 2M : gli invarianti di curvatura, ad esempio quello appena visto, non divergono per r = 2M , eciò significa che tale punto è solo una singolarità delle coordinate.
Vogliamo quindi trovare un sistema di coordinate che non abbia questa singolarità; per illuminare lanatura del problema, consideriamo un esempio più semplice, la metrica di Rindler (2.3.12):
ds2 = −x2 dt2 + dx2
definita per t ∈ R e x > 0, presenta una singolarità in x = 0. Tale singolarità non è di curvatura, perchèlo spaziotempo di Rindler, come quello di Minkowski, è piatto, e sappiamo inoltre che le geodetichefiniscono con lunghezza finita in x = 0 (quindi la singolarità non è all’infinito); si dimostra che gli scalaridi curvatura non divergono in x = 0.
3.7. L’estensione di Kruskal del buco nero di Schwarzschild 79
Vediamo ora un approccio sistematico per trovare un sistema di coordinate buone:
• introduciamo una famiglia di geodetiche che vanno verso la singolarità usando il parametro affinelungo le geodetiche come coordinata. Torna comodo considerare le geodetiche nulle, che si trovanoimponendo
0 = ds2 = −x2 dt2 + dx2 =⇒ dx2
x2= dt2 =⇒ t = ± log x+ c
• introduciamo delle coordinate nulleu := t− log x
v := t+ log x=⇒
x = e(v−u)/2
t =1
2(v + u)
con u, v ∈ R
Per u costante abbiamo geodetiche nulle outgoing, ovvero uscenti dalla singolarità:
x∗ := log x c = t− x∗dx∗dt
= 1 > 0
Per v costante abbiamo delle geodetiche ingoing, entranti nella singolarità:
dx∗dt
= −1 < 0
La metrica di Rindler diventa:
ds2 = −ev−u dudv
U := −e−uV := ev
=⇒ ds2 = −dU dV
con U < 0 e V > 0; la trasformazione finale sarà
T :=V + U
2
X :=V − U
2
=⇒ ds2 = −dT 2 + dX2
che è la metrica di Minkowski. Invertendo le varie relazioni, si ha che la relazione tra le coordinateoriginali (t, x) e quelle “di Minkowski” (T,X) è
x =√X2 − T 2
t = atanh(T
X
) =⇒X = x cosh t
T = x sinh t
Ora non c’è più la singolarita in x = 0, si ha infatti U = 0 o V = 0, quindi possiamo estendere lospaziotempo permettendo U, V ∈ R.
80 Capitolo 3. Le equazioni di Einstein
Figura 3.1: disegno riassuntivo: il quarto di piano colorato è il Rindler wedge.
La natura delle singolarità delle coordinate:
• sulle linee nulle X = ±T abbiamo t = ±∞, il che ci dice che è una brutta coordinata;
• gli osservatori su x = cost hanno accelerazione propria costante e tale che
√aµaµ =
1
x
x→0−−−→ +∞
cioè anche quella è una brutta coordinata.
Paragoniamo gli osservatori statici nello spaziotempo di Schwarzschild, che hanno accelerazione propria
√aµaµ =
(1− 2M
r
)− 12 M
r2
che diverge con r → 2M , con la quadriaccelerazione nello spazio di Rindler, che invece diverge con x→ 0.Considerando che
(xµ) =
trϑϕ
=
τ/√v
r0
ϑ0
ϕ0
=⇒ (uµ) =
1/√v
000
essendo v = 1− 2M
re τ il tempo proprio: allora
aµ = ∇uuµ = ∇v−1/2∂t uµ =
1√v∇tuµ =
1√v
(∂tuµ + Γµtνu
ν) =1√v
Γµtt1√v
=1
vΓµtt
Il comportamento della coordinata t della metrica di Schwarzschild per r → 2M è analogo alla t di Rindlerquando x → 0, perciò la singolarità della metrica di Schwarzschild per r → 2M è strettamente analogaalla singolarità della metrica di Rindler per x→ 0. Per studiare la singolarità delle coordinate, è rilevantesolo la metrica bidimensionale
ds2 = −(
1− 2M
r
)dt2 +
(1− 2M
r
)−1
dr2 (3.7.1)
3.7. L’estensione di Kruskal del buco nero di Schwarzschild 81
Usiamo lo stesso metodo usato prima, troviamo le geodetiche nulle:
dt2 =
(r
r − 2M
)2
dr2 =⇒ t = ±r∗ + k
dove
r∗ := r + 2M log( r
2M− 1)
=⇒ dr∗dr
=1
1− 2M
r
(3.7.2)
Definiamo ora u e v come u := t− r∗v := t+ r∗
=⇒ u, v ∈ R (3.7.3)
perciò
ds2 = −(
1− 2M
r
)dudv (3.7.4)
dove r è una funzione di u e v definita implicitamente tramite
r∗(r) =v − u
2(3.7.5)
Usando la (3.7.5) otteniamo
ds2 = −2Me−r/2M
re(v−u)/4M dudv (3.7.6)
in cui, se r → 2M , u → ∞ o v → −∞, perciò è ancora singolare. Confrontando con il caso di Rindler,introduciamo nuove coordinate U e V :
U = −e−u/4M
V = ev/4M(3.7.7)
dette coordinate di Kruskal , per cui ovviamente U < 0, V > 0, e da cui
ds2 = −32M3 e−r/2M
rdU dV (3.7.8)
che non è più singolare per r → 2M , infatti si ha U = 0 o V = 0; possiamo perciò estendere la soluzione diSchwarzschild permettendo ad U e V di assumere tutti i valori compatibili con r > 0.1 La trasformazionefinale è data da
T =V + U
2
X =V − U
2
=⇒ ds2 =32M3 e−r/2M
r
(−dT 2 + dX2
)+ r2
(dϑ2 + sin2ϑdϕ2
)(3.7.9)
La relazione tra (t, r) e (T,X) è data da
( r
2M− 1)er/2M = X2 − T 2
t
2M= 2 atanh
( TX
) (3.7.10)
per cui, se r è costante si ha X2 − T 2 = k, cioè un’iperbole, mentre se t è costante si ha T/X = k, cioèuna retta; notiamo inoltre che se r > 0 allora X2 − T 2 > −1. La retta U = 0 si indica con H+ e vienedetta orizzonte del futuro, mentre quella V = 0 si indica con H− e viene detta orizzonte del passato.
1oltre r = 0 non si può andare perchè c’è la singolarità di curvatura.
82 Capitolo 3. Le equazioni di Einstein
Figura 3.2: rappresentazione dello spaziotempo considerato: le regioni colorate sono vietate, in quantorappresentano il luogo dei punti r < 0.
Gli assi U e V individuano quattro zone del piano, indicate in figura con i numeri romani, per cuiosserviamo che:
• le singolarità r = 0 sono di tipo spazio e non sono linee di tipo tempo all’origine delle coordinate;
• la regione I con r > 2M è asintoticamente piatta;
• ogni osservatore che entra nella regione II non può mai più uscirvi; in un intervallo finito del tempoproprio raggiunge la singolarità. In particolare, anche ogni segnale di luce che l’osservatore emettefinirà nella singolarità. Per questo, la regione II viene detta buco nero, e H+ è il cosiddettoorizzonte degli eventi;
• la regione IV ha esattamente le stesse proprietà della regione II, ma col tempo rovesciato. Ogniosservatore nella regione IV deve venire dalla singolarità r = 0 (in un tempo proprio finito), e deveuscire da questa regione: per questo motivo H+ si chiama orizzonte del passato e la regione IVviene detta buco bianco;
• la regione III rappresenta un’altra regione asintoticamente piatta, un altro universo;
• nell’estensione di Kruskal ogni punto è una 2-sfera.
Per capire meglio la geometria dello spaziotempo, consideriamo la superficie di tipo spazio t = 0 (T = 0),allora
ds2 =
(1− 2M
r
)−1
dr2 + r2(dϑ2 + sin2ϑ dϕ2
)
Grazie alla simmetria sferica, limitiamoci al piano ϑ =π
2, per cui
ds2 =
(1− 2M
r
)−1
dr2 + r2 dϕ2 (3.7.11)
Vogliamo immergere questa geometria bidimensionale in R3; la metrica dello spazio euclideo in coordinatecilindriche è
ds2 = dz2 + dr2 + r2 dϕ2 (3.7.12)
3.7. L’estensione di Kruskal del buco nero di Schwarzschild 83
Consideriamo ora z = z(r), ovvero una superficie di rotazione in R3. La metrica indotta su questasuperficie sarà
ds2 =
[1 +
(dz(r)
dr
)2]
dr2 + r2 dϕ2 =
(1− 2M
r
)−1
dr2 + r2 dϕ2
dove l’ultima uguaglianza è stata imposta da noi: otteniamo dunque
1 +
(dz(r)
dr
)2
=
(1− 2M
r
)−1
=⇒ r = 2M +z2
8M(3.7.13)
Figura 3.3: ponte di Einsten-Rosen, anche detto wormhole: è una topologia di tipo R×S2, per ϑ fissato.
Tale ipersuperficie t = 0 si estende da r =∞ attraverso r = 2M ad r =∞, e quindi consiste di un ponteche connette due universi identici, cioè le regioni I e III.
Osservazione 3.7. Un osservatore nella regione I non può comunicare con un osservatore nella regioneIII; ogni segnale di luce mandato dalla regione III verso la regione I finisce nel buco nero.
Nel 1783 John Michell si chiese come calcolare la velocità di fuga di un oggetto in funzione del raggio delcorpo da cui è attratto:
1
2mv2 = G
Mm
r
v=c=⇒ r =
2GM
c2
ottenendo così il raggio di Schwarzschild avendo tuttavia usato una teoria “sbagliata”.
I buchi neri possono essere dotati di carica, elettrica o magnetica, che porta alla soluzione di Reissner-Nordström, possono ruotare (soluzione di Kerr, vedi esercizio nel foglio 6), o possono portare cariche emomento angolare (soluzione di Kerr-Newman). Valgono le quattro leggi dei buchi neri, che stannoin stretta analogia con le leggi della termodinamica; per esempio, la prima legge diche che
dM = TdS + ΩdJ (3.7.14)
con T = κ/2π, κ = forza sulla superficie ed S = A/4, essendo A l’area dell’orizzonte. Tempo fa sipensava che l’analogia con la termodinamica fosse solo formale, ma nel 1974 Hawking scoprì che i buchineri irradiano come un corpo nero con temperatura
T =~κ2π
84 Capitolo 3. Le equazioni di Einstein
fenomeno quantistico, in quanto a livello classico i buchi neri sono totalmente neri, noto come effettoHawking . I buchi neri sono così oggetti dotati di temperatura ed entropia, quindi la relazione tra le leggidei buchi neri e della termodinamica è ben di più di un’analogia!
Rimangono tuttavia delle questioni aperte: se S è l’entropia di un buco nero, quali sono i microstati,ricordando che S = kB logN , che danno luogo a quest’entropia? Questo problema rappresenta unadelle chiavi per una teoria quantistica della gravità. Alcuni progressi nella spiegazione dell’entropia deibuchi neri sono stati dati dalla teoria delle stringhe1. Nessuno ha mai misurato l’effetto Hawking inastronomia, in quanto T ∼ M−1, tuttavia si possono vedere effetti simili con buchi neri analoghi, comei vortici nei fluidi (orizzonte per il suono) ed indice di rifrazione modificato con luce laser con cui s’èmisurato tale effetto.
1a tale proposito, è consigliata la lettura de L’universo elegante, di Brian Greene.
Capitolo 4
Cosmologia
4.1 Omogeneità ed isotropiaQuale soluzione delle equazioni di Einstein descrive il nostro universo? Per rispondere a questa domanda,abbiamo bisogno di alcune ipotesi motivate dalle osservazioni: faremo l’ipotesi che l’universo sia omo-geneo ed isotropo. Già dai tempi di Copernico sappiamo che la nostra posizione nell’universo non èprivilegiata; se ci trovassimo in un’altra regione dell’universo, le caratteristiche di base del nostro intornosarebbero le stesse (cioè l’universo è omogeneo, detto in parole povere). È inoltre naturale assumere chel’universo sia isotropo, cioè tale che nessuna direzione spaziale sia preferita.
Le osservazioni su scala sufficientemente grande danno dei risultati che non dipendono dalla direzione incui guardiamo, e sperimentalmente si osserva che:
• la distribuzione delle galassie è omogenea ed isotropa su scale molto grandi;
• conferma dell’omogeneità e dell’isotropia è data anche dalla radiazione di fondo di raggi X, raggi γe microonde1, si trova infatti che le anisotropie sono dell’ordine
dT
T' 10−5
Definizione 4.1. Uno spaziotempoM è spazialmente omogeneo se esiste una famiglia ad un para-metro di ipersuperfici Σt di tipo spazio che fogliano M tale che ∀t e per due punti qualsiasi p, q ∈ Σtesista sempre un’isometria f della metrica gµν con f(p) = q.
Figura 4.1: rappresentazione della situazione descritta.
Apriamo una piccola parentesi sulle isometrie: date M, N varietà (differenziabili pseudo-)riemanniane,dotate rispettivamente di una metrica g ed una γ, la funzione f : M→ N tale che p 7→ f(p) = q è taleche
f∗γ = g
1detto Cosmic Microwave Background, abbreviato in CMB.
86 Capitolo 4. Cosmologia
dove f∗, o pullback, è definito come
(f∗γ) (u, v) := γ(Df(u), Df(v)) (4.1.1)
cioè per un’isometria vale cheg(u, v) = γ(Df(u), Df(v))
SeM = N , γ = g allorag(u, v) = g(Df(u), Df(v)) f∗g = g
che significa che se muoviamo la metrica tramite f , essa non cambia. Ricordiamo che, dette yα ed xµ lecoordinate locali rispettivamente di q e p, allora
yα = fα(xµ) Df(u) = uµ∂fα
∂xµ∂α
Definizione 4.2. Uno spaziotempo è spazialmente isotropo in ogni punto se esiste una congruenzadi curve1 di tipo tempo (osservatori), con vettori tangenti uµ tale che:
i) lo spaziotempo sia unione di queste curve;
ii) dato un punto p qualsiasi e due vettori s1, s2 in p perpendicolari ad u, esiste sempre un’isometriache lascia p ed u invariati e ruota s1 in s2.
Figura 4.2: rappresentazione della situazione descritta.
Tali condizioni significano che in universo isotropo è impossibile costruire un vettore perpendicolare adu geometricamente preferito. In un universo omogeneo ed isotropo, le ipersuperfici Σt di omogeneitàdevono essere perpendicolari ai vettori tangenti u, altrimenti potremmo costruire un vettore spazialegeometricamente preferito, ottenuto intersecando una Σt con un piano perpendicolare ad u.
gµν induce una metrica hµν(t) su Σt restringendo l’azione di g ai vettori tangenti a Σt; poichè le Σt sonoperpendicolari ai vettori u vale che
gµν = −uµuν + hµν(t) =⇒ gµνuν
︸ ︷︷ ︸uµ
= −uµ uνuν︸ ︷︷ ︸−1
+hµνuν =⇒ hµνu
ν = 0
cioè h è proiettore sul complemento ortogonale ad u. Quali sono i vincoli sulla geometria spaziale,descritta da h, imposti dall’omogeneità e dall’isotropia? Consideriamo il tensore di Riemann R
(3) ijkl
costruito a partire da hij su Σt; se alziamo l’indice j con hij ed antisimmetrizziamo in i, j ed in k, lpossiamo interpretare il risultato come una mappa lineare L dallo spazio vettoriale W delle 2-forme in pin se stesso, L : W →W . Definiamo, presa ω 2-forma, la quantità
ωkl := R(3) ij
kl ωij (4.1.2)1ovvero se ogni curva può essere mappata in un’altra tramite un’isometria.
4.1. Omogeneità ed isotropia 87
e notiamo che, dette x1, x2, x3 le coordinate su Σt, una base di W è data da
dx1 ∧ dx2,dx2 ∧ dx3,dx1 ∧ dx3
perciò la dimensione di W è 3, quindi L è una matrice 3× 3. Inoltre, sfruttando la proprietà del tensoredi Riemann per cui
R(3) ij
kl = R(3) ij
kl
deduciamo che L è simmetrica, e possiamo quindi scegliere una base ortonormale di autovettori di L comebase di W . Tutti gli autovalori di L devono essere uguali (altrimenti esisterebbe una 2-forma preferita,e, quindi, un vettore preferito ottenuto definendo ad esempio vk := ωijε
ijk) perciò
L = k1
dove k è una funzione, intendendo con tale scrittura che
R(3) ij
kl = kδi[kδjl] (4.1.3)
L’isotropia impone che k sia funzione al più del tempo1, quindi si può fare anche a meno della richiestadi omogeneità (l’isotropia in ogni punto implica l’omogeneità). Uno spazio che soddisfi la (4.1.3) conk costante si chiama spazio a curvatura costante: Eisenhart nel 1949 dimostrò che uno spazio acurvatura costante n-dimensionale, con segnatura n (cioè tale che g abbia solo autovalori positivi), èisomorfo a
Hn spazio iperbolico con k < 0
Sn n-sfera con k > 0
En spazio euclideo con k = 0
cioè la geometria spaziale dell’universo può essere solo iperbolica, sferica o piatta.
Osservazione 4.1. Il caso S3 è particolarmente interessante2, perchè descrive un universo finito e senzabordo (“universo chiuso”). S3 è l’ipersuperficie in R4 definita da
(x1)2
+(x2)2
+(x3)2
+(x4)2
= l2
Poniamo ora x4 = l cosψ, perciò (x1)2
+(x2)2
+(x3)2
= l2 sin2ψ
che è una 2-sfera con raggio l sinψ: usiamo quindi la nostra solita parametrizzazione
x1 = l sinψ sinϑ cosϕ
x2 = l sinψ sinϑ sinϕ
x3 = l sinψ cosϑ
quindi la metrica sarà data da
ds2 = l2[dψ2 + sin2ψ
(dϑ2 + sin2ϑ dϕ2
)](4.1.4)
e chiamiamo dΩ1, in cui il pedice si riferisce a k = 1, la quantità
dΩ21 = dψ2 + sin2ψ
(dϑ2 + sin2ϑ dϕ2
)
In modo simile si costruisce la metrica su H3:
ds2 = l2[dψ2 + sinh2 ψ
(dϑ2 + sin2ϑ dϕ2
)]= l2 dΩ2
−1 (4.1.5)
mentre la metrica su E3 sarà semplicemente, usando coordinate cartesiane:
ds2 = dx2 + dy2 + dz2 = dΩ20
e, in coordinate sferiche:ds2 = dψ2 + ψ2
(dϑ2 + sin2ϑ dϕ2
)(4.1.6)
1la dimostrazione di ciò si trova a pagina 94 del Wald; il punto di partenza è la seconda identità di Bianchi.2per evidenze sperimentali sappiamo che le sezioni spaziali dell’universo sono a k = 0.
88 Capitolo 4. Cosmologia
Come coordinate in 4 dimensioni scegliamo coordinate iperboliche (k < 0), sferiche (k > 0), o cartesiane(k = 0) su una delle superfici omogenee Σt, dopodichè estendiamo tali coordinate a tutte le altre Σttramite i nostri osservatori con vettore tangente u (“osservatori isotropi”), cioè ciascun osservatore hadelle coordinate spaziali fisse. Infine, etichettiamo ogni superficie col tempo proprio τ misurato da unorologio portato da uno degli osservatori isotropi: a causa dell’omogeneità, tutti gli osservatori isotropidevono misurare la stessa differenza di tempo tra due ipersuperfici.
Figura 4.3: se i due tempi non fossero uguali, avremmo modo di distinguere i due punti.
Giungiamo quindi alla metrica in 4 dimensioni:
ds2 = −dτ2 + a2(τ) dΩ2k (4.1.7)
dove a(τ) è il fattore di scala, determinato dalle equazioni di Einstein, che assorbe la dipendenza di kdal tempo, facendo così in modo che k possa valere solo 0 o ±1. La (4.1.7) è nota come metrica diFriedmann-Lemaître-Robertson-Walker , in futuro abbreviata con FLRW. Nella (4.1.7) ovviamente si èinteso
dΩ2k = dψ2 + f2
k (ψ)(dϑ2 + sin2ϑdϕ2
)con fk(ψ) =
ψ k = 0
sinψ k = 1
sinhψ k = −1
Per ottenere a(τ) sostituiamo la (4.1.7) nelle equazioni di Einstein: non è corretto tuttavia usare cometali quelle valide nel vuoto! Cosa prendiamo quindi come Tµν? Se l’energia/la massa dell’universo vienesolo dalla materia ordinaria, concentrata in galassie, possiamo approssimare queste ultime come dei granidi polvere, che è giustificato su scale cosmiche. Cosa vuol dire polvere dal punto di vista fisico? Vuol direche la pressione P è 0, essendo ciò giustificato dal fatto che le velocità random delle galassie sono piccole,quindi la pressione di questa polvere di galassie è trascurabile. Inoltre, le linee di mondo delle galassiedevono coincidere con quelle degli osservatori isotropi, altrimenti il moto relativo delle galassie e degliosservatori potrebbe essere usato per definire una direzione spaziale preferita:
Tµν = ρ uµuν
essendo ρ la densità di massa della materia, mediata su 2 − 5 · 107 anni luce, ed u è il vettore tangentealla traiettoria degli osservatori isotropi, ovvero u = ∂τ ; ρ = ρ(τ) è considerata costante nello spazio.
4.1. Omogeneità ed isotropia 89
Nell’universo c’è anche la radiazione, che ha come equazione di stato
P =ρ
3(4.1.8)
Il suo contributo attuale è trascurabile, ma nell’universo primordiale era il contributo dominante, perciòuseremo per Tµν la forma del fluido perfetto:
Tµν = ρ uµuν + P(gµν + uµuν)
che contiene entrambi i casi, ed è la forma più generale di un tensore compatibile con l’omogeneità el’isotropia. La radiazione è descritta dal tensore di Faraday Fµν e “porta con sè” un contributo
Tµν ∼ Fµρ F ρν −
1
4gµν Fαβ F
αβ =⇒ Tµµ = Fµρ Fρ
µ −1
44Fαβ F
αβ = 0
La traccia T νν del fluido perfetto vale:
T νν = ρ(−1) + P (4− 1) = −ρ+ 3P!= 0
ottenendo così la (4.1.8). Riportiamo ora dei fatti per commentare quanto visto fin’ora: dal 1997 sappiamoche nell’universo il 73% è energia oscura, il 22% è materia oscura ed il 5% è materia ordinaria. Èstato infatti osservato che l’universo si espande accelerando, il che ha portato a chiedersi cosa possavincere l’effetto gravitazionale attrattivo: è stata quindi ipotizzata l’esistenza di questa energia oscura,e dell’antigravità. La materia oscura ha invece effetti gravitazionali attrattivi ed interagisce poco con lamateria normale: delle spiegazioni in merito alla materia oscura potrebbero essere contenute nella teoriadella supersimmetria. In ogni caso, il modello più semplice per rendere conto dell’energia oscura è quellodella costante cosmologica Λ; le equazioni di Einstein assumono quindi la forma, introducendovela:
Gµν = −Λgµν (4.1.9)
Andando a confrontare quest’equazione con quella di un fluido perfetto, tramite le equazioni di Einstein,si ha che
−Λgµν = Gµν = 8πTµν = 8π[ρ uµuν + P (gµν + uµuν)]
perciò
P = −ρ = − Λ
8π(4.1.10)
che è l’equazione di stato dell’energia oscura; notiamo che, essendo Λ > 0, l’energia oscura ha pressionenegativa.
FUN FACT: la densità di energia associata a Λ è circa 1 keV cm−3.
90 Capitolo 4. Cosmologia
4.2 Dinamica di un universo omogeneo ed isotropoCi prefiggiamo ora l’obiettivo di determinare l’evoluzione di un universo omogeneo ed isotropo, e per fareciò sostituiamo la metrica di FLRW (4.1.7) nelle equazioni di Einstein: si ottiene il seguente sistema diequazioni1
3a2
a2= 8πρ− 3k
a2
3a
a= −4π(ρ+ 3P )
(4.2.1)
note come equazioni di Friedmann. Aggiungendo l’equazione di stato ρ = ρ(P ) si hanno tante incognitequante equazioni. Se ρ > 0 e P ≥ 0, l’universo non può essere statico, ma dev’essere in espansione o incontrazione!
Osservazione 4.2. In questa espansione/contrazione, la distanza tra osservatori isotropi, in particolaregalassie, cambia col tempo, ma non esiste un centro preferito di espansione/contrazione, proprio comei punti sulla superficie di un palloncino che si gonfia/sgonfia - non esiste un centro sulla superficie delpalloncino.
È inoltre da osservare che le equazioni di Friedmann tengono conto dell’energia oscura tramite ρ e P .
4.2.1 La legge di HubbleSe la distanza misurata nella superficie di omogeneità tra due osservatori isotropi al tempo τ è R, quantovale la velocità v = R?
Figura 4.4: le due linee rappresentano le linee di mondo dei due osservatori.
R è dato dalla metrica: considerando dτ infinitesimo, abbiamo
ds2 = −dτ2 + a2(τ) dΩ2
ma dτ = 0 sulle superfici, perciò
R(τ) = a(τ)
∫dΩ
1senza dimostrazione, vedi esercizi. Per approfondimenti, si vedano le pagine 96/7 del Wald.
4.2. Dinamica di un universo omogeneo ed isotropo 91
e, allo stesso modo:
R(τ + dτ) = a(τ + dτ)
∫dΩ = a(τ + dτ)
R(τ)
a(τ)
Sviluppiamo al primo ordine con Taylor:
R(τ + dτ) = R(τ) +dR
dτdτ =
[a(τ) +
da
dτdτ
]R
a
perciò
v =dR
dτ=a
aR =: HR (4.2.2)
essendo H = a/a la costante1 di Hubble. La (4.2.2) è nota come legge di Hubble, ed è stata confermatadall’osservazione del redshift di galassie distanti, per cui risulta a > 0. La conferma di questa predizionedella relatività rappresenta un successo enorme della teoria. Purtroppo lo sviluppo storico annebbiò questosuccesso: Einstein era scontento di un universo dinamico, “voleva” un universo statico, ed introdusse diconseguenza la costante cosmologica. Apriamo ora una piccola parentesi sull’universo statico di Einstein:imponiamo perciò a = cost. = R, perciò, sfruttando la 1a equazione di Friedmann, abbiamo:
R2 =3k
8πρ(4.2.3)
Se ρ > 0 allora k = 1 (studiare come esercizio il caso ρ < 0 =⇒ k = −1); dalla 2a equazione diFriedmann si ha
P = −ρ3< 0 (4.2.4)
Einstein usò
ρ = ρΛ + ρmat. =Λ
8π+ ρmat.
P = PΛ = − Λ
8π
essendo Pmat. = 0, in quanto polvere. Dalla (4.2.4) segue
− Λ
8π= −1
3
(Λ
8π+ ρmat.
)=⇒ ρmat. =
Λ
4π=⇒ ρ =
3Λ
8π
perciò, sfruttando la (4.2.3):
R2 =1
Λ=
1
4πρmat.(4.2.5)
che porta a
ds2 = −dτ2 +1
Λ
[dψ2 + sin2ψ
(dϑ2 + sin2ϑ dϕ2
)]
che è la metrica dell’universo statico e chiuso di Einstein, la cui topologia è R× S3.
L’energia oscura è l’energia del vuoto, che in realtà non è esattamente vuoto a causa della conti-nua creazione ed annichilazione di particelle; dai conti tale energia risulta più grande del valore mi-surato di un fattore 10120. La teoria supersimmetrica prevede processi analoghi a quelli di creazioneed annichilazione, solo che hanno energia quasi uguale a quella tra antiparticelle, ma di segno op-posto. Nasce così il problema della costante cosmologica: come mai esiste, e come mai è così pic-cola? Con a > 0 e, dalla seconda equazione di Friedmann, a < 0, si avrebbe il seguente scenario:
1varia lentamente nel tempo.
92 Capitolo 4. Cosmologia
l’espansione dell’universo deve essere stata semprepiù veloce se andiamo indietro nel tempo. In uncerto punto a = 0; dal disegno si ha
tanϕ =a(τ)
T= a =⇒ T =
a
a= H−1
Se il tasso di espansione fosse sempre stato quel-lo che osserviamo oggi, avremmo avuto a = 0 untempo T = H−1 fa. In realtà, H−1 fornisce soloun limite superiore all’età dell’universo. a = 0 cor-risponde a ciò che va sotto il nome di Big Bang , incui la distanza tra tutti i punti dello spazio è 0, ela curvatura e densità di materia è pari a ∞. È importante sottolineare che il Big Bang non rappresentaun’esplosione di materia concentrata in un punto di uno spaziotempo non singolare preesistente; siccomela struttura stessa dello spaziotempo è singolare al Big Bang, non ha senso chiedere quale sia lo statodell’universo ad un tempo antecedente ad esso. Non c’è nessun modo per estendere lo spaziotempo oltrela singolarità del Big Bang. La conclusione coerente con quanto detto è che l’universo iniziò con esso: èchiaro però che molto vicino a tale singolarità ci aspettiamo che gli effetti quantistici diventino importantie che le predizioni della relatività generale classica falliscano.
A partire dalla metricads2 = −dτ2 + a2(τ) dΩ2
k
avevamo visto le equazioni di Friedmann:
3a2
a2= 8πρ− 3k
a2
3a
a= −4π(ρ+ 3P )
Ora vogliamo ricavare delle leggi di conservazione, e scriviamo pertanto l’evoluzione della densità dimassa, a partire dalla prima equazione di Friedmann:
3a2 = 8πρa2 − 3k =⇒ 6aa = 16πρaa+ 8πρa2
sostituendo ora ad a la sua espressione data dalla seconda equazione di Friedmann si ottiene
ρ+3a
a(ρ+ P ) = 0 (4.2.6)
Vediamo la (4.2.6) nel caso di
1. polvere, P = 0, si ha la conservazione della massa:
0 = ρa3 + 3ρaa2 =d
dt
(ρa3)
=⇒ ρa3 =: c1
2. radiazione, P = ρ/3:
0 = ρa4 + 4ρaa3 =d
dt
(ρa4)
=⇒ ρa4 =: c2
Nonostante il contributo della radiazione sia trascurabile nell’universo presente, era dominantenell’universo primordiale, in cui a→ 0.
Risolviamo le equazioni di Friedmann per i vari casi:
1. per la polvere:3a2
a2= 8πρ− 3k
a2=
8πc1a3− 3k
a2=⇒ a2 − c′1
a+ k = 0
essendo c′1 = 8πc1/3.
4.2. Dinamica di un universo omogeneo ed isotropo 93
Risolvendo tale equazione tramite separazione delle variabili si ottengono i seguenti risultati:
k = 1(S3)
k = 0(E3)
k = −1(H3)
a =c′12(1− cos η)
a =3
√9c′14τ2
a =c′12(cosh η − 1)
τ =c′12(η − sin η) τ =
c′12(sinh η − η)
Notiamo che nel caso k = 1, la curva (a(η), τ(η)) descrive una cicloide.Per k = 0,−1 l’universo si espande per sempre, e con a→∞ si ha
a→ 0 k = 0
a→ 1 k = −1
e a viene vista come la velocità di espansione. Per k = 1 l’universo si espande, raggiunge un valoremassimo ac = C per cui a = 0, e poi si contrae per finire in un big crunch, corrispondente ad a = 0.
Secondo le odierne osservazioni cosmologiche, il destino dell’universo, tra circa 1011 anni, sarà unbig rip (dato dalla equazione di stato), ovvero una situazione per cui a→∞ in un ∆τ finito.
94 Capitolo 4. Cosmologia
2. Nel caso della radiazione, la soluzione della prima equazione di Friedmann è
3a2
a= 8πρ− 3k
a2=
8πc2a4− 3k
a2=⇒ a2 − c′2
a2+ k = 0
dove c′2 := 8πc2/3. Come prima, si ottiene che:
k = 1(S3)
k = 0(E3)
k = −1(H3)
a =
√√√√√c′2
1−
(1− τ√
c′2
)2 a = (4c′2)
14√τ a =
√√√√√c′2
(1 +
τ√c′2
)2
− 1
ed il comportamento al variare di k è quello raffigurato nella figura precedente.
3. Nel caso della costante cosmologica (“energia oscura”), per cui:
ρ =Λ
8π= cost.
ricaviamo dalla prima equazione di Friedmann:
3a2
a2= Λ− 3k
a2=⇒
a =
√3
Λcosh
(τ
√Λ
3
)k = 1
a = exp
(τ
√Λ
3
)k = 0
a =
√3
Λsinh
(τ
√Λ
3
)k = −1
Osservazione 4.3. In questo caso, le tre soluzioni sono isometriche, ovvero vale che
a
a=
Λ
3> 0
e si parla di universo di de Sitter : un universo siffatto è in espansione accelerata, proprio comequello che si misura oggi.
4.3. Redshift cosmologico 95
Osservazione 4.4. Gli effetti della costante cosmologica sono trascurabili con a → 0, ovveroindietro nel tempo; in tali situazioni sono più importanti la materia ordinaria e, soprattutto, laradiazione, quindi quando l’universo è abbastanza piccolo possiamo trascurare il contributo di Λ.
4. Nel caso di universo vuoto, si ha ρ = 0 = P : allora la prima equazione di Friedmann implica che
3a2
a2= −3k
a2
per la quale l’unico valore ammissibile di k è −1, in quanto il primo membro è sempre positivo. Siha allora che a2 = 1 =⇒ a = τ da cui
ds2 = −dτ2 + τ2[dψ2 + sinh2 ψ
(dϑ2 + sin2ϑdϕ2
)]
che caratterizza il cosiddetto universo di Milne. In realtà tale metrica è quella di Minkowski
ds2 = −dt2 + dr2 + r2(dϑ2 + sin2ϑ dϕ2
)
usando il seguente cambio di coordinate:t = τ coshψ
r = τ sinhψ
4.3 Redshift cosmologico
Figura 4.1: rappresentazione della situazionedescritta.
Consideriamo la seguente situazione: una stella inp1 emette un fotone con frequenza ω1, che noi ri-ceviamo in p2 con frequenza ω2. Sappiamo che,detto kµ il quadrivettore d’onda, vale:
ω1,2 = −kµuµ1,2Possiamo sempre trovare un vettore di Killing ξche punta nella direzione della proiezione di kµ suΣ1 in p1 e punta nella direzione della proiezione dikµ su Σ2 in p2.
Esempio 4.1. Consideriamo Σ piatta, k = 0; sen-za perdere generalità, possiamo assumere che laproiezione di kµ su Σ1 in p1 sia sulla direzione ∂x,cosa che possiamo sempre fare a meno di rotazioni,per cui
〈k, ∂y〉 = 〈k, ∂z〉 = 0
inizialmente. Poichè ∂y, ∂z sono di Killing, allora
〈k, ∂y〉 = 〈k, ∂z〉 = 0
anche in p2, cioè la proiezione di kµ su Σ2 in p2
punta in direzione ∂x e ξ = ∂x è il vettore di Killingche cercavamo.
Un ragionamento simile si può fare anche per S3, H3; inoltre, possiamo calcolare le norme con la metricarelativa, che dipende dal solo fattore di scala a:
√〈ξ, ξ〉|p1〈ξ, ξ〉|p2
=a(τ1)
a(τ2)
96 Capitolo 4. Cosmologia
Scomponiamo kµ come
kµ = A
⊥Σ︷︸︸︷uµ +B
ξµ√ξ2
ma kµ è di tipo luce, perciò:
kµkµ = 0 =⇒(Auµ +B
ξµ√ξ2
)(Auµ +B
ξµ√ξ2
)= −A2 +B2 = 0 =⇒ A = B
avendo sfruttato che ξµuµ = 0. Abbiamo perciò:
kµ = A
(uµ +
ξµ√ξ2
)
moltiplicando ad ambo i lati per kµ si ottiene
0 = A
(uµk
µ +ξµk
µ
√ξ2
)=⇒ −uµkµ =
ξµkµ
√ξ2
=⇒ ω1,2 =ξµk
µ
√ξ2
∣∣∣∣∣p1,2
=⇒ ω2
ω1=
√ξ2∣∣∣p1√
ξ2∣∣∣p2
=a(τ1)
a(τ2)
ricordando che ξµkµ|p1 = ξµkµ|p2 poichè ξ è Killing e k è tangente alla geodetica. Quando l’universo si
espande, la lunghezza d’onda di ogni fotone aumenta in proporzione all’espansione. Andiamo a calcolareil fattore di redshift:
z :=λ2 − λ1
λ1=ω1
ω2− 1 =
a(τ2)
a(τ1)− 1 (4.3.1)
Vogliamo ora calcolare R = R(z), cioè la distanza in funzione di z:
ds2 = −dτ2 + a2(τ) dΩ2k
La prima equazione di Friedmann con materia e costante cosmologica implica che
3a2
a2= 8πρ− 3k
a2con ρ = ρmat. + ρΛ, ρrad. = 0
La luce si muove lungo geodetiche nulle, per cui ds2 = 0: vale dunque
τ2∫
τ1
dτ
a(τ)=
p2∫
p3
dΩk =R
a(τ2)=⇒ R = a(τ2)
a(τ2)∫
a(τ1)
1
a(τ)
dτ
da︸︷︷︸1/a
da = a(τ2)
a(τ2)∫
a(τ1)
da
aa
A questo punto utilizziamo la prima equazione di Friedmann per eliminare a:
R = a(τ2)
a(τ2)∫
a(τ1)
da
a
√8π
3(ρmat. + ρΛ) a2 − k
y=a(τ)a(τ2)
= a(τ2)
1∫
a(τ1)
a(τ2)
a(τ2) dy
ya(τ2)
√8π
3(ρmat. + ρΛ) y2 a2(τ2)− k
Introducendo la costante di Hubble odierna H0 := a(τ2)/a(τ2) si ottiene:
R =1
H0
1∫
(1+z)−1
dy
y
√8π
3H20
(ρmat. + ρΛ) y2 − k
a2(τ2)
(4.3.2)
4.3. Redshift cosmologico 97
Apriamo ora una breve parentesi per elaborare ulteriormente l’integrale della (4.3.2). Dalla primaequazione di Friedmann si ha k = 0 per
ρ = ρcrit. =3H2
8π(4.3.3)
Definiamo il parametro di densità ΩI come
ΩI :=ρIρcrit.
(4.3.4)
dove I è un indice che può assumere uno dei valori tra m, k, Λ; allora la prima equazione di Friedmanndiventa1:
1 =∑
I
ΩI (4.3.5)
Indicando con una “o” a pedice di certe quantità il loro valore odierno, si ha che:
8π
3H20
= ρ−1crit.,o ρΛ = ρΛ,o = cost.
ed inoltre sappiamo che a3(τ2)ρm,o = a3(τ)ρm, perciò:
ρm = ρm,o
(a(τ2)
a(τ)
)3
=ρm,o
y3=⇒ 8π
3H20
(ρm + ρΛ) = ρ−1crit.,o
(ρm,o
y3+ ρΛ,o
)=
Ωm,o
y3+ ΩΛ,o
Chiudiamo dunque la parentesi sostituendo questo risultato nella (4.3.2), per cui si ottiene:
R =1
H0
1∫
(1+z)−1
dy
y
√Ωm,o
y+ y2ΩΛ,o + Ωk,o
(4.3.6)
A questo punto ci interessa valutare l’integrale in (4.3.6) nei casi particolari di:
1. galassie vicine, perciò con piccolo redshift z → 0, per cui è possibile effettuare lo sviluppo alprim’ordine (1 + z)−1 ≈ 1− z. Abbiamo
R = H−10
1∫
1−z
f(y) dy
Indicando con F una funzione tale che F ′(y) = f(y), allora
R = H−10 [F (1)− F (1− z)] = H−1
0 [F (1)− F (1) + F ′(1)z + o(z)] = H−10 f(1)z
avendo effettuato uno sviluppo centrato in 1 al primo ordine di F (1− z). Ma f(1) è nota:
f(1) =1√
Ωm,o + ΩΛ,o + Ωk,o︸ ︷︷ ︸=1 per (4.3.5)
= 1 =⇒ R = H−10 z
che è la relazione lineare scoperta da Hubble;
2. solo contributo della costante cosmologica, ovvero k = 0 = ρm: vale
R = H−10
1∫
(1+z)−1
dy
y2√
ΩΛ,o= H−1
0 Ω−1/2Λ,o︸ ︷︷ ︸=1
[−1 + 1 + z] = H−10 z
1usando a/a = H, ricavando H2 dalla (4.3.3), dividendo tutto per 3H2 e definendo Ωk = −k/a2H2.
98 Capitolo 4. Cosmologia
3. solo contributo della materia, più simile alle condizioni del Big Bang, per cui k = 0 = Λ:
R = H−10
1∫
(1+z)−1
dy√yΩm,o
= H−10 Ω−1/2
m,o︸ ︷︷ ︸=1
2[1− (1 + z)−1/2
]= 2H−1
0
[1− (1 + z)−1/2
]
4.4 Phantom energy, Big Rip, orizzonti cosmologici, coordinatenormali di Riemann
L’equazione di stato più generale èP = ωρ
essendo ω una costante tale che
ω =
0 polvere1
3radiazione
−1 costante cosmologica
È usata anche l’equazione di stato di Chaplygin:
P = − λ
ρ2
dove λ è una costante. Sfruttiamo l’equazione di stato più generale per risolvere le equazioni di Friedmann:
ρ+ 3(ρ+ P )a
a= 0 =⇒ ρ+ 3ρ(1 + ω)
a
a= 0 =⇒ ρ
ρ= −3(1 + ω)
a
a=⇒ log ρ = logC − 3(1 + ω) log a
ovveroρ = Ca−3(1+ω) (4.4.1)
Sostituiamo questo risultato nella prima equazione di Friedmann:
3a2
a2= 8πρ− 3k
a2= 8πCa−3(1+ω) − 3k
a2
da cui
a2 =8πC
3a−(1+3ω) − k (4.4.2)
Apriamo ora una parentesi: dalla seconda equazione di Friedmann
3a
a= −4π(ρ+ 3P ) = −4πρ(1 + 3ω)
si nota che l’espansione accelera con 1 + 3ω < 0 =⇒ ω < −1/3. Poniamoci in questa condizione, cioè−1− 3ω > 0: con a grande possiamo trascurare il termine −k, quindi possiamo integrare la (4.4.2):
a =
√8πC
3a−(1+3ω)/2 =⇒ a(1+3ω)/2 da =
√8πC
3dτ =⇒ 2
3(1 + ω)a3(1+ω)/2 =
√8πC
3(τ − τ0)
da cui
a =
[3(1 + ω)
2
√8πC
3(τ − τ0)
]2/3(1+ω)
(4.4.3)
4.4. Phantom energy, Big Rip, orizzonti cosmologici, coordinate normali di Riemann 99
Se ω < −1 allora τ < τ0; con τ → τ0 a diverge. Il valore discrimine ω = −1 è detto phantom divide,mentre l’energia con ω < −1 è detta phantom energy .
Figura 4.1: rappresentazione della situazione.
Consideriamo ora la metrica FLRW, con k = 0:
ds2 = −dτ2 + a2(τ) dx2
e supponiamo che un segnale venga mandato da(τ = 0,x = x1) a P . Essendo un segnale luminoso
ds2 = 0 =⇒ dx2 =dτ2
a2(τ)
perciò
|x0 − x1| =t0∫
0
dτ
a(τ)(4.4.4)
Vogliamo che l’osservatore O sia in grado di rice-vere segnali da qualsiasi altro osservatore isotropo(cioè nessun orizzonte), cioè che possa “vedere tut-to”: dev’essere allora |x1| → ∞, ma allora, per la(4.4.4), anche l’integrale deve divergere. Che condizioni deve soddisfare a affinchè l’integrale diverga?Dev’essere a(τ) ≤ ατ , per qualche costante α, con τ → 0, cioè l’universo si espande sufficientementepiano. Però, per tutti i modelli FLRW, tale integrale converge e ci sono quindi orizzonti.
Esempio 4.2. Consideriamo la polvere, perciò k = 0: allora abbiamo che
a(τ) = Cτ2/3
con C costante; la (4.4.4) dà
|x0 − x1| = C−1
τ0∫
0
dτ
τ2/3=
3 3√τ0C
cioè, per dati (τ0,x0), questa è l’equazione che determina l’orizzonte x1.
Consideriamo un sistema di coordinate vicino ad un punto p tale chegµν |p = ηµν
gµν,α|p = 0
Come si fa a costruire un tale sistema di coordinate? Sia v ∈ TpM, e si individui la geodetica xµ(λ)univocamente determinata dalle condizioni
xµ(0) = pdxµ
dλ
∣∣∣∣λ=0
= vµ
100 Capitolo 4. Cosmologia
Definizione 4.3. La mappa esponenziale è quell’applicazione exp : TpM → M che associa a vµ ∈TpM il punto xµ(1).
Si può mostrare che exp è un diffeomorfismo in un intorno di p; in questo modo si può usare v per definireun sistema di coordinate locali vicino a p che vengono chiamate coordinate normali di Riemann.
Se xµ(λ) risolve l’equazione delle geodetiche
d2xµ
dλ2+ Γµνρ
dxν
dλ
dxρ
dλ= 0
allora anche xµ(aλ), con a costante, è una soluzione: con a = 2 avremo la stessa soluzione che parte avelocità doppia. Vale che
exp : avµ 7→ xµ(a) (4.4.5)
Scegliamo una base ortonormale eα di TpM, cioè tale che
〈eα, eβ〉 = ηαβ = gαβ |p (4.4.6)
dopodichè scriviamo v = vαeα e chiamiamo q = exp(v); a questo punto definiamo le coordinate normalidi Riemann del punto q come le componenti vα di v. Le coordinate normali di Riemann del punto xµ(λ)saranno, per la (4.4.5), le componenti λvα di λv; però xµ(λ) = λvµ soddisfa l’equazione delle geodetiche,notando che xµ = vµ:
0 + Γµνρ(λvα) vνvρ = 0
λ=0=⇒ Γµνρ(0) vνvρ = 0 ∀v =⇒ Γµ(νρ)(0) = 0
Se la connessione è simmetrica, cioè la torsione è nulla, allora si ha che
Γµ[νρ] = 0 =⇒ Γµνρ(0) = 0 (4.4.7)
che è proprio quanto volevamo dimostrare.
Osservazione 4.5. Nel caso di torsione nonnulla, non possiamo più concludere che vale la (4.4.7), equindi in p la derivata covariante non si riduce a quella standard: non si ha più un sistema inerziale,perciò se la torsione è diversa da 0 cade il principio di equivalenza.
Esempio 4.3. Se si immerge la S2 in R3, si può identificare lo spazio tangente al polo nord col solopiano (x, y). Etichettiamo un vettore al polo nord con le componenti (v, w): verificare che la mappaesponenziale è
exp : (v, w) 7→(ϑ =
√v2 + w2, ϕ = arctg
(w
v
))
Suggerimento: le geodetiche che passano per il polo nord hanno ϕ costante e ϑ = aλ.La metrica sulla 2-sfera è
È importante che le derivate prime della metrica in v = w = 0 siano 0, così che i simboli di Christoffelnel polo nord siano 0.
4.4. Phantom energy, Big Rip, orizzonti cosmologici, coordinate normali di Riemann 101
Possiamo concludere con i seguenti commenti:
• le coordinate normali di Riemann rappresentano la migliore approssimazione allo spazio piatto chesi può fare;
• gli osservatori inerziali si muovono lungo geodetiche di tipo tempo. Le coordinate normali di Rie-mann forniscono un sistema localmente inerziale, il quale assomiglia, a meno di termini del secondoordine, allo spaziotempo piatto; localmente la fisica è quella dello spaziotempo piatto, e questa è latraduzione matematica del principio di equivalenza.
Testi consigliati
[1] K. S. Thorne & J. A. Wheeler C. W. Misner. Gravitation. W.H. Freeman and Company, New York,NY 10010, 1973.
[2] S. M. Carroll. Lecture Notes on General Relativity. University of California, Santa Barbara, CA93106, 1997.
[3] R. M. Wald. General Relativity. The University of Chicago Press, Chicago, IL 60637, 1984.
[4] S. Weinberg. Gravitation and Cosmology. John Wiley & Sons, Inc., San Francisco, CA 94104, 1972.
Questo documento è pubblicato secondo il testo della licenza libera CC BY-SA 3.0. 2012-13
Indice analitico
algebra di Lie, 28atlante, 7
Big Bang, 92big crunch, 93big rip, 93boost di Lorentz, 26buco bianco, 82buco nero, 82
campotensoriale, 28vettoriale, 28
carta, 7cicloide, 93coefficienti di connessione, 35congruenza di curve, 86connessione, 35