Controlli Automatici 2 Stefano Miani 1 1 Dipartimento di Ingegneria Elettrica, Gestionale e Meccanica Universit` a degli Studi di Udine tel: 0432 55 8262 email: [email protected]web: www.diegm.uniud.it/smiani A.A. 2004-05
Transcript
Controlli Automatici 2
Stefano Miani1
1Dipartimento di Ingegneria Elettrica, Gestionale e MeccanicaUniversita degli Studi di Udine
Bolzern, Scattolini, SchiavoniFondamenti di controlli automatici,McGraw-Hill37 euro
Contenuti del corsoFunzione di trasferimento
Legame ingresso-uscitaStruttura della f.d.t.CancellazioniInvarianza della f.d.t.Rappresentazioni della f.d.t.F.d.t associata a un ritardo e ad azione proporzionale, integralee derivativaRisposta impulsivaRisposta al gradino
Schemi a blocchiConnessione serieConnessione paralleloRetroazione
RealizzazionePassaggio da stato a f.d.t.Passaggio da f.d.t. a statoForma di stato del sistema serieCancellazioniCancellazioni algebriche
Risposta in frequenzaDeterminazione della c.i.A asintoticamente stabileIngressi sinusoidali per sistemi asint. stabiliProprieta bloccanti degli zeriSegnali periodiciDiagrammi di Bode
Legame tra forma di stato e funzione di trasferimento
Sistema lineare e stazionario
x = Ax + Buy = Cx + Du
con u ∈ IRm, x ∈ IRn, y ∈ IRp.
sX (s)− x(0) = AX (s) + BU(s)Y (s) = CX (s) + DU(s)
X (s) = (sI − A)−1 x(0) + (sI − A)−1 BU(s)
Y (s) = C (sI − A)−1 x(0) +(C (sI − A)−1 + D
)︸ ︷︷ ︸
W (s)
U(s)
X (s) = Xel(s) + Xef (s)Y (s) = Yel(s) + Yef (s)
La f.d.t. W (s) contiene informazioni sul solo legameingresso-uscitau(t) = δ(t) =⇒ U(s) = 1 =⇒ Y (s) = W (s)
funzione di trasferimento = trasformata di Laplace della rispostaall’impulso g(t)
Per u(t) generica vale
yef (t) =
∫ t
0g(t − τ)u(τ)dτ
Struttura della funzione di trasferimento per sistemi SISO(m = p = 1)
W (s) = C (sI − A)−1 B + D
(sI − A)−1 =adj(sI − A)
det(sI − A)
Numeratore: matrice n × n di polinomi di grado al piu (n − 1)Denominatore: φA(s)=polinomio caratteristico della matrice A, digrado n
C (sI − A)−1 B =Cadj(sI − A)B
det(sI − A)=
n1(s)
φA(s)
n1(s) di grado ≤ (n − 1)
W (s) =n1(s)
φA(s)+ d =
n1(s) + dφA(s)
φA(s)=
n(s)
φA(s)
d 6= 0 ⇒ n(s) ha grado n.Se alcuni zeri zi di n(s) coincidono con gli autovalori di A (sidimostri che se cio accade allora ci sono cancellazioni tra gli zeri din1(s) e gli zeri di φA(s)) ⇒ grado di W (s) e < n.Effettuate le cancellazioni,zeri del numeratore di W (s)=zeri della f.d.t.zeri del denominatore di W (s)=poli della f.d.t.
poli ⊆ autovalori
Invarianza della funzione di trasferimento
x = Ax + Buy = Cx + Du
=⇒ G (s) = C (sI − A)−1B + D
Cambio di base, T invertibile: x = Tx
˙x =
A︷ ︸︸ ︷TAT−1 x +
B︷︸︸︷TB u
y = CT−1︸ ︷︷ ︸C
x + D︸︷︷︸D
u
G (s) = C (sI − A)−1B + D = CT−1(sI − TAT−1)−1TB + D
=⇒ G (s) = G (s)
Zeri, poli e rappresentazioni
Forma poli-zeri
G (s) =ρ
∏i (s + zi )
∏i (s
2 + 2ζiαni s + α2ni )
sg∏
i (s + pi )∏
i (s2 + 2ξiωni s + ω2
ni )
Forma di Bode
G (s) =µ
∏i (1 + sτi )
∏i (1 + 2ζi
sαni
s + s2
α2ni)
sg∏
i (1 + sTi )∏
i (1 + 2ξis
ωnis + s2
ω2ni)
ρ: costante di trasferimentog : tipo−zi , − pi : zeri e poli realiαni , ωni : pulsazioni naturali delle coppie di zeri e poli complessiconiugatiζi , ξi : smorzamenti delle coppie di zeri e poli complessi coniugatiµ: guadagnoτi , Ti : costanti di tempo degli zeri e dei poli reali
µ =ρ
∏i τi
∏i αni∏
i Ti∏
i ωni
τi =1
zi, Ti =
1
pi
Ritardo, proporzionale, integrale e derivativa
Dato il segnale u(t), il segnale ritardato di τ > 0 secondi ey(t) = u(t − τ). Trasformando entrambi i membri si ottiene
Y (s) = e−sτU(S)
ovvero la f.d.t. associata al ritardo e G (s) = e−sτ . Le f.d.t.associate all’azione proporzionale, integrale e derivativa sono:
GP(s) = KP
GI (s) = 1s
GD(s) = s
Risposta impulsiva di sistemi elementari
G (s) =K
1 + sT⇒ g(t) =
K
Te−t/T
G (s) =1
s⇒ g(t) = δ−1(t)
G (s) = K ⇒ g(t) = Kδ(t)
G (s) = K ω2n
s2+2ξωns+ω2n
⇒ g(t) = Kωn√1− ξ2
e−ξωnt sin(ωnt
√1− ξ2
)
Risposta al gradino di sistemi elementari (U(s) = 1s )
G (s) =bmsm + bm−1s
m−1 + . . . b0
sn + an−1sn−1 + . . . a0
Zeri del numeratore/denominatore: zeri/poli di G (s)G (s) e stabile se tutti i poli hanno parte reale negativa
G (s) =
µ∏
i (1 + sτi )∏
i
(1 + 2ξni
sωni
+(
sωni
)2)
sg∏
i (1 + sTi )∏
i
(1 + 2ξdi
sωdi
+(
sωdi
)2)
G (s) = µ1+sT
y(t) = µ(1− e−t/T
)
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.450
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1Step Response
Time (sec)
Am
plitu
de
G (s) = µ
1+2ξs/ω+(s/ω)2
y(t) = µ
(1− 1√
1−ξ2e−ξωt sin
(ωt
√1− ξ2 + arccos ξ
))
Schemi a blocchi
Sistemi n-dimensionali, m = p = 1 (SISO)
W (s) =n(s)
d(s)= K
∏(s − zi )∏(s − pi )
C(s) P(s)r u y
Wry (s) = P(s)C (s) = C (s)P(s)
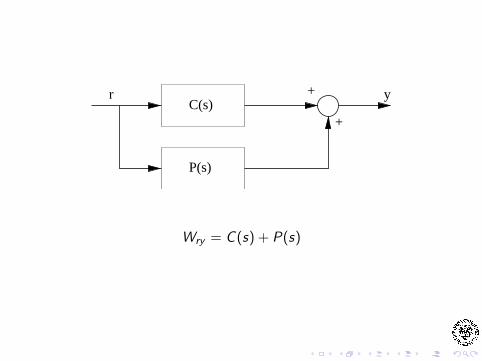
C(s)r +
+
P(s)
y
Wry = C (s) + P(s)
C(s)
H(s)
r +y
P(s)−
Wry (s) =C (s)P(s)
1 + H(s)C (s)P(s)
Realizzazione
x = Ax + Buy = Cx + Du
Wuy (s) = C (sI − A)−1B + D =Cadj(sI − A)B
det(sI − A)+ D
E univoco!!!
W (s) di ordine n in forma minima: le forme di stato che larealizzano sono infinite. Le forme di stato di dimensione minimahanno n stati.
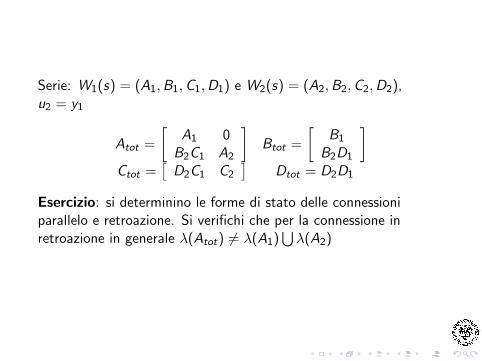
Serie: W1(s) = (A1,B1,C1,D1) e W2(s) = (A2,B2,C2,D2),u2 = y1
Atot =
[A1 0
B2C1 A2
]Btot =
[B1
B2D1
]Ctot =
[D2C1 C2
]Dtot = D2D1
Esercizio: si determinino le forme di stato delle connessioniparallelo e retroazione. Si verifichi che per la connessione inretroazione in generale λ(Atot) 6= λ(A1)
⋃λ(A2)
r u y
s−3s+1s−3
s+2
Wry (s) =s + 1
s + 2
Il sistema non e’ internamente stabile, ovvero esistono c.i. percui l’uscita di evoluzione libera diverge.
W1(s) : A1 = −2, B1 = 1, C1 = −5, D1 = 1
W2(s) : A2 = 3, B2 = 1, C2 = 4, D2 = 1
Atot =
[−2 0−5 3
]
Le cancellazioni algebriche introdotte per semplificare ladeterminazione della fdt sono ammesse. L’eventuale cancellazionezero-polo instabile e’ virtuale.
r +y
−
10 1s−1s+5
1s−1
1s−1
r +
−
10s+5
yy1
Wry (s) =10
(s + 5)(s − 1) + 10Wry1(s) =
10(s − 1)
(s + 5)(s − 1) + 10
Nota: se il sistema di partenza avesse realmente avuto larappresentazione con y1, il sistema complessivo sarebbe risultatoinstabile internamente.
Risposta in frequenza
x(t) = Ax(t) + Bu(t)y(t) = Cx(t) + Du(t)
G (s) = C (sI − A)−1B + D (1)
Dato u(t) = eλt+β, ∃ x(0) tale che x(t) = x(0)eλt+β?