I giocattoli computazionali stanno acqui- stando un peso sempre maggiore nei conte- sti caratterizzati da una elevata cultura tec- nologica e godono di una grande diffusione anche nelle fasce più giovani della popola- zione, specie quelle in età prescolare. Ma soprattutto suscitano negli adulti in genera- le, e in particolare in chi si occupa di pro- blematiche educative, opinioni contrastanti. C’è chi li ritiene un’ottima “palestra” per i più giovani, che dovrebbero così prendere confidenza e prepararsi ad interagire con gli strumenti e i gadget del loro probabile fu- turo, diventandone al contempo protagoni- sti nella progettazione e nella creazione e non limitandosi ad esserne solo utenti. Al- tri, al contrario, denunciano i pericoli insiti nel fatto che i più piccoli si accostino trop- po presto ad espressioni tecnologiche pen- sate per un mondo di adulti e spesso finaliz- zate a promuovere la produttività piuttosto che la riflessione, col risultato di deprimere la creatività e costringere lo spazio del gio- co a dimensioni e percorsi ripetitivi. Com’è ovvio, entrambe le posizioni sono in buona misura giustificate, ed entrambe tuttavia peccano di assolutismo. Può essere, forse, più interessante chiederci quali caratteristiche possiamo evidenziare, nel giocattolo in sé e nel contesto in cui questo viene proposto al bambino, che ne ottimizzino la valenza pedagogica e di cre- scita. A nostro avviso un buon giocattolo computazionale, perché possa essere consi- derato tale, dovrebbe poter assolvere a due importanti compiti: da un lato, rivestire un alto valore cognitivo, in grado di favorire, ad esempio, l’apprendimento di concetti com- plessi (quali feedback, auto-organizzazione, causalità, controllo, intenzionalità), lo svi- luppo di modalità di pensiero astratto e strutturato e di capacità di modellizzazione della conoscenza, ecc.; dovrebbe, inoltre, essere in grado di suscitare importanti e si- gnificativi interrogativi su temi quali viven- te e animato, oltre ad assolvere alla funzio- ne cognitiva di costruzione del sé e dell’i- dentità individuale. Dall’altro lato, dovrebbe poter giocare un ruolo di mediazione e transazione culturale in grado di veicolare valori e letture del mondo, di produrre ed elaborare nuovi si- gnificati, di assolvere alla funzione sociale di costruzione dell’identità collettiva e di un sistema di valori condiviso. Condizione necessaria, seppur non suffi- ciente, perché le due funzioni sopra citate vengano assolte è che questi oggetti siano non solo ispezionabili (a differenza della maggior parte dei giocattoli commerciali quali, ad esempio, Tamagotchi o Furby), consentendo di entrare dentro sia ai mecca- nismi di costruzione e assemblaggio che a quelli che ne regolano il comportamento e l’interazione con l’esterno, ma soprattutto modificabili, consentendo la creazione di va- riazioni significative a partire da un modello dato o la produzione ex novo. In questo senso, rivestono particolare interesse i gio- cattoli il cui comportamento sia program- mabile, che coniughino cioè la generalità e la flessibilità del computer con la concretezza e la reattività degli automi (o robot). Obiettivo del presente articolo è quello di proporre alcune riflessioni su cosa possa e debba intendersi per un buon giocattolo tecnologico, anche attraverso lo sviluppo di una proposta di utilizzabilità che sia in gra- 46 TD 27 numero 3-2002 Costruire giocattoli cibernetici Costruire giocattoli cibernetici Riflessioni e proposte sull’esplorazione e programmazione di giocattoli computazionali per la scuola dell’infanzia ■ Edith K. Ackermann, Augusto Chioccariello, Stefania Manca, Luigi Sarti
Transcript
I giocattoli computazionali stanno acqui-stando un peso sempre maggiore nei conte-sti caratterizzati da una elevata cultura tec-nologica e godono di una grande diffusioneanche nelle fasce più giovani della popola-zione, specie quelle in età prescolare. Masoprattutto suscitano negli adulti in genera-le, e in particolare in chi si occupa di pro-blematiche educative, opinioni contrastanti.C’è chi li ritiene un’ottima “palestra” per ipiù giovani, che dovrebbero così prendereconfidenza e prepararsi ad interagire con glistrumenti e i gadget del loro probabile fu-turo, diventandone al contempo protagoni-sti nella progettazione e nella creazione enon limitandosi ad esserne solo utenti. Al-tri, al contrario, denunciano i pericoli insitinel fatto che i più piccoli si accostino trop-po presto ad espressioni tecnologiche pen-sate per un mondo di adulti e spesso finaliz-zate a promuovere la produttività piuttostoche la riflessione, col risultato di deprimerela creatività e costringere lo spazio del gio-co a dimensioni e percorsi ripetitivi. Com’èovvio, entrambe le posizioni sono in buonamisura giustificate, ed entrambe tuttaviapeccano di assolutismo.Può essere, forse, più interessante chiederciquali caratteristiche possiamo evidenziare,nel giocattolo in sé e nel contesto in cuiquesto viene proposto al bambino, che neottimizzino la valenza pedagogica e di cre-scita. A nostro avviso un buon giocattolocomputazionale, perché possa essere consi-derato tale, dovrebbe poter assolvere a dueimportanti compiti: da un lato, rivestire unalto valore cognitivo, in grado di favorire, adesempio, l’apprendimento di concetti com-plessi (quali feedback, auto-organizzazione,
causalità, controllo, intenzionalità), lo svi-luppo di modalità di pensiero astratto estrutturato e di capacità di modellizzazionedella conoscenza, ecc.; dovrebbe, inoltre,essere in grado di suscitare importanti e si-gnificativi interrogativi su temi quali viven-te e animato, oltre ad assolvere alla funzio-ne cognitiva di costruzione del sé e dell’i-dentità individuale.Dall’altro lato, dovrebbe poter giocare unruolo di mediazione e transazione culturalein grado di veicolare valori e letture delmondo, di produrre ed elaborare nuovi si-gnificati, di assolvere alla funzione sociale dicostruzione dell’identità collettiva e di unsistema di valori condiviso.Condizione necessaria, seppur non suffi-ciente, perché le due funzioni sopra citatevengano assolte è che questi oggetti sianonon solo ispezionabili (a differenza dellamaggior parte dei giocattoli commercialiquali, ad esempio, Tamagotchi o Furby),consentendo di entrare dentro sia ai mecca-nismi di costruzione e assemblaggio che aquelli che ne regolano il comportamento el’interazione con l’esterno, ma soprattuttomodificabili, consentendo la creazione di va-riazioni significative a partire da un modellodato o la produzione ex novo. In questosenso, rivestono particolare interesse i gio-cattoli il cui comportamento sia program-mabile, che coniughino cioè la generalità e laflessibilità del computer con la concretezza ela reattività degli automi (o robot).Obiettivo del presente articolo è quello diproporre alcune riflessioni su cosa possa edebba intendersi per un buon giocattolotecnologico, anche attraverso lo sviluppo diuna proposta di utilizzabilità che sia in gra-
46
TD
27
num
ero
3-20
02Co
struir
e gioc
attoli
cibe
rneti
ci
Costruiregiocattoli cibernetici
Riflessioni e proposte sull’esplorazione e programmazionedi giocattoli computazionali per la scuola dell’infanzia
■ Edith K. Ackermann, Augusto Chioccariello, Stefania Manca, Luigi Sarti
47
TD
27
num
ero
3-20
02Co
struir
e gioc
attoli
cibe
rneti
ci
do di “rivestire” il giocattolo di una serie dimetodiche, interfacce, servizi, funzioni, di-spositivi software e hardware in grado diconferirgli appetibilità, usabilità, ispeziona-bilità secondo una data granularità, e tratta-bilità da parte di bambini piccoli.L’articolo si compone di due parti distinte.Nella prima, dal titolo Ambienti di gioco pro-grammabili: cos’è possibile per un bambino diquattro anni?, Edith K. Ackermann si occu-pa di analizzare quali aspetti della program-mazione possono essere di particolare inte-resse per i bambini. Cosa vuol dire program-mare? Persone diverse associano a questa at-tività significati diversi. Inoltre, non tutti so-no d’accordo sulle sue potenzialità per l’ap-prendimento. Ackermann propone di guar-dare alla programmazione come a uno stru-mento per esplorare concetti relazionaliquali “controllo” e “agente”, ma soprattut-to in quanto specchio e finestra attraversocui i bambini possono entrare in relazione odialogare con oggetti e persone, oltre checon sé stessi nella relazione con interlocuto-ri artificiali (in termini piagetiani, la capacitàdi “regolare gli scambi” col mondo1). Inquesto contesto, la programmazione diven-ta un medium per dare ed eseguire ordini;per costruire comportamenti autonomi o in-teragire con essi; per animare oggetti; per si-mulare comportamenti. Inoltre, la program-mazione può diventare un contesto ricco peresplorare le teorie dei bambini sulla mentepropria, degli altri e delle creature artificiali.Vengono discusse sia le valenze della pro-grammazione nello sviluppo cognitivo deibambini che alcune indicazioni per la pro-gettazione di ambienti di gioco programma-bili per bambini di quattro anni.
Nella seconda parte, intitolata La fabbricadei robot, Augusto Chioccariello, StefaniaManca e Luigi Sarti cercano di risponderealla domanda: come rendere possibile per ibambini la programmazione di costruzionicibernetiche? La composizione di program-mi, tradizionalmente considerata un’attivitàspecialistica, può essere affrontata anche dabambini, purché gli ambienti proposti sianospecializzati nella direzione delle caratteri-stiche del problema da risolvere; siano im-mediatamente operativi e sostengano il dia-logo e la riflessione metacognitiva. Vieneproposto un modello a regole per la defini-zione del comportamento di un robot, cheinstaura una relazione tra lo stato dei senso-ri e una sequenza di azioni. Comportamen-ti complessi sono il risultato della composi-zione di comportamenti semplici.Poiché si tratta di una proposta rivolta abambini piccoli, l’ambiente deve poter of-frire modalità di accesso sia iconiche che te-stuali e permettere di personalizzare i nomie la rappresentazione grafica dei suoi ele-menti, in sintonia col significato antico di“dare nome” alle cose nel senso di control-larle. I bambini possono esplorare compor-tamenti esistenti (esempi precostituiti o svi-luppati da altri), adattarli alle loro necessitào crearne di nuovi. L’articolo descrive un kit di costruzioni ci-bernetiche basato sul LEGO® MIND-STORMS™ e le caratteristiche di un am-biente di sviluppo software che privilegiaapprocci sociali basati sulla narrazione e lameta-riflessione. Vengono, inoltre, descrittialcuni progetti realizzati da bambini di cin-que e sei anni nelle scuole dell’infanzia delComune di Reggio Emilia.
1Piaget J. (1975), L’Equi-libration des structures co-gnitives, Puf, Paris.
INTRODUZIONEApprendere a programmare alla scuola del-l’infanzia? Perché? Che cosa ci può essere diinteressante in questo per un bambino? Checosa si può imparare? Questo articolo è rivolto ai ricercatori, aiprogettisti, agli educatori e ai genitori; tuttiquesti hanno buone ragioni per interrogar-si. Il mio scopo è quello di riesaminare il si-gnificato di programmare e di suggerire lecondizioni atte a rendere le attività ludichedi “programmazione” coinvolgenti per ibambini e ad aiutarli a controllare il loromondo e se stessi.Secondo il dizionario Webster, un program-ma è “una sequenza logica di istruzioni perun computer digitale”. Programmare,quindi, è l’azione di scrivere tale sequenzalogica perché venga eseguita da un compu-ter. Questa definizione rende bene il signifi-cato di programmazione per i programma-tori professionali degli inizi dell’informati-ca, ma non rende ragione dell’intera storia.Gli sviluppi recenti dell’informatica come laprogrammazione orientata agli oggetti, ilcalcolo parallelo distribuito, la Vita Artifi-ciale, così come l’uso crescente della “pro-grammazione” da parte di ricercatori di for-mazione diversa da quella informatica, ren-dono questa definizione obsoleta. Oggi unagran parte degli adulti programma, in unmodo o nell’altro, e questa attività non èpiù solo patrimonio degli esperti. È tempo,quindi, di riproporre la domanda: che cos’èla programmazione?La risposta non è semplice. La programma-zione assume significati diversi a secondadelle persone e non tutti sono d’accordo cir-
ca le sue potenzialità nel promuovere l’ap-prendimento e lo sviluppo umano. Per alcu-ni la programmazione è l’attività di scriverecodice mentre per altri è una modalità di pen-siero [Papert, 1980]. Alcuni ne percepisconoil potenziale nell’aiutare i bambini ad affina-re il loro pensiero o a diventare “scienziati”[Resnick et al, 2000]; altri ancora sottoli-neano la sua capacità di favorire la creativitàumana [Barchi et al, 2001] e migliorare l’au-to-espressione [Maeda, 2000].Inoltre, la programmazione è una specie diPigmalione: diventa quello che vuoi che sia.Per uno scienziato, per esempio, si trasfor-ma in uno strumento con cui controllare ilmondo (attraverso la simulazione). Alloscrittore serve per creare nuove forme dinarrativa o per costruire un mondo virtuale.I progettisti la usano come strumento dina-mico per costruire modelli e per gli psicolo-gi dello sviluppo, categoria a cui apparten-go, il valore nascosto della programmazio-ne risiede primariamente, e non sorpren-dentemente, nella sua capacità di promuo-vere l’esplorazione, l’espressione e la rifles-sione dell’io-in-relazione “in erba” deibambini.Nel seguito, passo in rassegna alcune ten-denze attuali della programmazione in untentativo di far emergere il loro potenziale“nascosto” di esplorazione di queste istanzerelazionali. Partendo dalla nozione di com-puter come “macchina psicologica” [Turkle,1984], mi focalizzo sui modi in cui la rap-presentazione giocosa di attività di program-mazione, in senso lato, possa aiutare i bam-bini a esplorare questioni relative all’azione eal controllo in modi nuovi e proficui.
48
TD
27
num
ero
3-20
02Am
bienti
di gi
oco p
rogr
amma
bili: c
os’è
possi
bile p
er un
bamb
ino di
quatt
ro an
ni?
Ambienti di giocoprogrammabili:cos’è possibile per unbambino di quattro anni?
La programmazione come “specchio” e “finestra”per entrare in relazione con gli oggetti e le persone
ni?Nella prima parte elenco alcuni degli ingre-dienti che, dal mio punto di vista, sono allabase delle diverse tendenze nella storia del-la programmazione. Indugio sulle metaforeche le guidano, sulle modalità di ragiona-mento coinvolte e sulla loro rilevanza psico-logica rispetto ai bambini. Prendo in consi-derazione tre tendenze della programma-zione: dare istruzioni, costruzione di com-portamenti autonomi e adattamento distrutture esistenti. Per illustrare ogni ten-denza, uso scenari immaginari o reali in cuii bambini svolgono i loro giochi di pro-grammazione.In una seconda parte discuto del perchémolti bambini in età prescolare possono di-vertirsi e trarre beneficio dall’esplorazionedi versioni semplificate delle tendenze sopracitate. Mi concentro su tre caratteristicheche, secondo me, possono aiutare i bambi-ni, dai più piccoli fino ai più grandi, a rap-presentare aspetti di azione e controllo inmodo giocoso: padronanza (controllare/la-sciare liberi); dar vita (creare/interagire);adattare (prendere a prestito, modulare).Nelle ultime sezioni mi domando a chi pia-ce programmare e soprattutto perché possapiacere ad un bambino.
CHE COS’ÈLA PROGRAMMAZIONE?Il succo della programmazione è dare istru-zioni, o comandi, ad una macchina perché liesegua. Ovviamente la macchina può anchenon essere un computer. Potrebbe essere undispositivo meccanico o una serie di mat-toncini “intelligenti”. I comandi non devo-no necessariamente essere scritti come unasequenza di passi logici, come agli inizi del-l’informatica. Le istruzioni possono essereincorporate in componenti digitali da as-semblare manualmente [Chioccariello et al,2002].
La programmazione comedare istruzioni: digli cosa deve fare!Le istruzioni possono assumere forme di-verse. Si possono comunicare verbalmenteo per iscritto, come in un libro di ricette ocome quando si disegna su un tovagliolouna cartina per qualcuno. Normalmente ciònon è chiamato programmazione. In unprogramma le istruzioni specificate hannobisogno di un medium reattivo capace dieseguirle. In altre parole, le istruzioni sonocontenute dentro una macchina, una com-ponente software nel computer o in pezzitangibili, come una serie di operazioni daeseguire. Per illustrare questo concetto im-
magino scenari tipo gioco in cui i bambinipossono dire ai loro giocattoli intelligentiche cosa fare e mi chiedo: dove comincia laprogrammazione?Scenario 1: Comandate a bacchettail vostro cane robotImmaginate un gruppo di bambini di treanni che battendo le mani inducono il lorocane robot a passeggiare dimenandosi. Se bat-tono le mani una volta il cane muove la coda,se le battono due volte muove la testa freneti-camente (come se ridesse), se le battono trevolte il cane fa un salto mortale.Fin qui non è previsto nessun tipo di pro-grammazione a meno che … i bambini pos-sano configurare il giocattolo affinché ese-gua più di un ordine alla volta.Scenario 2: Racconta le favoleal Racconta Storie “Tell-Tale”Un gruppo di bambini di età compresa fra iquattro e gli otto anni sono riuniti nel labo-ratorio di Justine Cassell al Media Lab delMIT. Ogni bambino è occupato a raccontareil suo frammento di storia in un piccolo regi-stratore portatile a forma di palla. Cinquebambini, cinque registratori a palla di colorediverso, cinque pezzi della storia. Una voltaregistrate le storie, i bambini si riuniscono eagganciano le palle in modo da formare un“bruco” chiamato “Tell-Tale”.“Tell-Tale” [Ananny, 2001; Cassell eRyokai, 2001] si limita semplicemente a ri-petere la sequenza dei pezzi di storia regi-strati, dalla testa alla coda. Può darsi che“Tell-Tale” sia stupido, ma permette aibambini di occuparsi della parte intelligentedel gioco. Essi possono creare i loro fram-menti di storie personali e ricombinarli co-me desiderano per comporre trame piùcreative. I bambini imparano velocemente amodificare i pezzi di storia, i connettori el’ordine dei pezzi per migliorare la favola.Devono soltanto ogni volta cambiare l’ordi-ne di disposizione delle palle e/o registrareun nuovo frammento.Questi scenari dimostrano che dire ad unartefatto che cosa fare non è sufficiente perparlare di programmazione. Il da farsi devecoinvolgere più di una singola azione o co-mando. Infatti, non parliamo di program-mazione quando inneschiamo una rispostatramite un segnale di input, come quandosuoniamo il campanello o accendiamo unelettrodomestico.Conclusione provvisoriaDa un punto di vista di relazione con l’og-getto, la programmazione per istruzionipuò essere pensata come un dialogo fra unapersona ed un artefatto. Per esempio, la
persona (il bambino) sta dicendo - o inse-gnando - ad un oggetto (una lavatrice) a fa-re qualcosa (il bucato) per conto suo. In al-tre parole, una persona delega un lavoro adun oggetto e, con le opportune istruzioni,quell’oggetto farà in modo autonomo il la-voro che la persona gli ha chiesto di fare.La nostra ricerca sui bambini e le macchineindica che anche per i bambini programma-re significa farsi aiutare da una macchina, daun computer o da un giocattolo a fare coseche richiedono intelligenza. A volte anche ibambini, come gli informatici, non sonocerti se l’intelligenza risieda nella macchinastessa o nella persona che l’ha progettata[Ackermann, 2000; Brandes, 1996]. Lamaggior parte dei bambini fra i sei e gli un-dici anni sarebbe d’accordo sulla seguenteconsiderazione: Non sto programmandoquando “dico” al mio macinacaffè di maci-nare il caffè o quando metto in moto la miaauto. Invece programmo quando “dico” allamia lavatrice quali passaggi deve compiereperché il mio bucato venga lavato (…) anchese posiziono semplicemente la manopola perfar partire il programma. Chiaramente ibambini non intendono dire che parlanoveramente al macinacaffè o alla lavatrice(anche se non ci vorrà molto perché ciò siapossibile). Quello che fanno, invece, è farpartire il suo programma girando una ma-nopola o spingendo pulsanti (dandole istru-zioni). Questo è quello che essi associanocon “programmare la macchina”.
La programmazionecome costruzione di comportamenti:collegali per renderli autonomi!Con lo sviluppo della programmazioneorientata agli oggetti e di quella parallela di-stribuita, la percezione di cosa voglia direprogrammare assume sfumature diverse.Dal predisporre una macchina perché ese-gua una serie di comandi l’accento si è spo-stato all’attribuzione di obiettivi a un grup-po di semplici oggetti computazionali e afarli comunicare tra loro per poter ottenereprestazioni migliori1. Questo nuovo para-digma, spesso denominato “programma-zione decentrata”, porta con sé la sua partedi metafore.Dal fare cose per te la macchina o il giocatto-lo intelligente ora è predisposto per fare lesue cose. Dalla condizione di schiavo, o di la-voratore sotto-qualificato alla catena dimontaggio, diventa un apparecchio che siautoregola, una creatura cibernetica. L’ar-tefatto conquista autonomia. Diversamentedal suo servile predecessore, ora si presenta
munito di sensori, motori e quant’altro“lo” aiuti a vedere il mondo a suo modo, adavere i suoi valori di riferimento o scopi in-terni, e ad ottimizzare di conseguenza le“sue” mosse.Scenario: Costruire CreatureNon ci sono computer in vista. I bambini diuna scuola elementare del centro di Bostonstanno costruendo sculture animate, veicoli ecreature con mattoncini LEGO integrati damotori e sensori, più altri oggetti che esterna-mente assomigliano ai mattoncini LEGO main realtà sono elementi computazionali (flip-flop, porte logiche e così via). Un veicolo condue sensori di luce, uno a destra e l’altro a si-nistra, si dirige verso una fonte luminosa. Isensori di luce sono collegati a due motori inmodo da obbedire alle seguenti due regole: seil sensore di destra vede più luce di quello disinistra, allora si accende il motore di sini-stra, e viceversa. Il risultato è un movimentoa zig-zag verso la luce [Martin, 1988].I comportamenti interessanti emergonodalla connessione di pezzi. Ogni pezzo, dasolo, potrebbe fare poco o nulla. Se invecelo si collega ai suoi vicini in un certo modola struttura inizia a produrre comportamen-ti inaspettati. Il programma è incorporato incomponenti tangibili che i bambini possonomontare e smontare manualmente [Chioc-cariello et al, 2002]).Conclusioni provvisorieLa nostra ricerca sui bambini e i robot sug-gerisce che l’interazione con artefatti cheesibiscono comportamenti auto-regolanti èdiversa dal dare istruzioni ad un giocattoloche esegue semplicemente ordini. In cia-scun caso (per esempio, istruire obbedientitartarughe Logo, danzare assieme a tartaru-ghe cibernetiche imprevedibili, o costruirlepartendo dai pezzi base), la natura e il gra-do di autonomia dell’artefatto sono diversicosì come lo sono le reazioni dei singolibambini [Ackermann, 1991; Granott,1991; Papert, 1993].Per molti bambini l’interesse non risiedenello smontare una creatura per capire il suomeccanismo o vedere che cosa c’è dentro lascatola nera. L’interesse risiede, invece, nel-l’ottimizzare il muoversi assieme ad unacreatura pronta ad entrare in azione e, cosìfacendo, sperimentare ed esplorare la dina-mica degli scambi, gli schemi del dare eprendere, il grado di reciproca influenza ocontrollo, tutte situazioni tipiche delle tran-sazioni umane. Il loro scopo, in altre paro-le, è quello di conversare più che costruire,armonizzare più che rompere, immedesi-marsi più che analizzare.
50
TD
27
num
ero
3-20
02Am
bienti
di gi
oco p
rogr
amma
bili: c
os’è
possi
bile p
er un
bamb
ino di
quatt
ro an
ni?
1L’idea è di definire i com-portamenti di un oggettoin termini di attributi emetodi (stati, preferenze,azioni) come nella pro-grammazione orientataagli oggetti; contempo-raneamente, avere diversioggetti che interagisconofra di loro per formaregrandi reti, o agenzie, diagenti interconnessi, co-me nell’informatica di-stribuita.
2Osservazioni raccoltedall’autore durante unworkshop a Porto Ale-gre, Brasile, estate 2000.
51
Ambie
nti di
gioc
o pro
gram
mabil
i: cos
’è po
ssibil
e per
un ba
mbino
di qu
attro
anni?La programmazione come adattamento
di strutture esistenti: non partire dazero, prendi a prestito e “impossessati”!Più che in passato, gli strumenti ed i giocat-toli di oggi incoraggiano gli utenti a pro-grammare in senso lato, decostruendo piùche costruendo, adattando programmi esi-stenti, senza dover mai guardare una riga dicodice. I creatori possono importare interipezzi di testo, immagini e suono (incluso ilcodice sottostante), che possono poi modu-lare e ricombinare a piacimento. In altre pa-role, nessun bisogno di partire da zero:prendi a prestito ciò che già esiste e “mani-polalo” finché non ti va bene.Questo passaggio dalla costruzione allosmontaggio o, in questo caso, dalla costru-zione di comportamenti alla loro modula-zione ha importanti implicazioni, sia per ibambini che per gli adulti.Scenario: AssemblaggiUn’aula informatica collegata a Internet eun gruppo di ragazzini di otto anni seduticiascuno di fronte al proprio computer. Ognistudente è occupato a scrivere una ricerca sul-l’Impero Romano. Come pensi che proceda lamaggior parte dei ragazzi? Ecco ciò che fan-no: navigano in rete finché non trovano unapagina che veramente gradiscono. Importa-no la pagina, o parti di essa, e la usano comecanovaccio che possono poi manipolare. Lofanno finché non assomiglia più all’originaletrovato o all’idea alla quale si sono ispirati,ma è diventata la loro2.Questo approccio da “arte povera” allascrittura genera grandi controversie fra glieducatori, i quali si chiedono se i bambini,prendendo a prestito in modo così spudo-rato, stanno ancora scrivendo, per non par-lare dello statuto di autori dei loro scritti. Iosostengo che, purché i ragazzi manipolino ipezzi presi a prestito sufficientemente a lun-go, essi realmente stanno scrivendo! Nonprendiamo tutti quanti a prestito, anchequando ci sembra di partire da zero? Comepotremmo non tener conto di ciò che altrihanno detto e pensato prima di noi quandocostruiamo qualcosa? Non è esagerato direche scrivere su una pagina bianca è un con-cetto che non esiste. Sempre accogliamo ciòche gli altri hanno detto e sempre parliamoa qualcuno. Entrambe le cose sono necessa-rie per trovare la propria voce. Entrambe lecose hanno aiutato molte persone, altri-menti riluttanti, a cimentarsi nello scrivere[Ackermann e Archinto, 2001].Per concludereDa una prospettiva psicologica, la differen-za fra costruire e smontare i comportamen-
ti di un artefatto (approccio dell’ingegnere)e modularne il comportamento intervenen-do nel (come parte del) suo ambiente (ap-proccio dello psicologo) è molto rilevante.Così come lo è la differenza fra muoversi as-sieme o conversare con un partner artificia-le e dare ordini ad un giocattolo tecnologi-co [Ackermann e Strohecker, 1999]. Nelseguito vedremo che alcuni bambini posso-no essere più inclini a preferire un approcciorispetto all’altro.
TD
27
num
ero
3-20
02
52
TD
27
num
ero
3-20
02Am
bienti
di gi
oco p
rogr
amma
bili: c
os’è
possi
bile p
er un
bamb
ino di
quatt
ro an
ni? PERCHE IMPARAREA PROGRAMMARE?Se, come abbiamo suggerito, programmare(in senso lato) riguarda il dare istruzioni,costruire o assemblare pezzi per crearecomportamenti interessanti, e modularecomportamenti esistenti, resta la domanda:che cosa c’è di interessante per i bambinipiù piccoli? Perché i bambini in età presco-lare dovrebbero imparare a programmare?Riesco ad individuare almeno tre ragioni.
Padroneggiare le cose:prendere il controllo/lasciarloandare/prendere il controlloQuando danno istruzioni i bambini si impa-droniscono del loro mondo. Creano o con-trollano cose capaci di eseguire i loro ordi-ni. Le mettono in movimento o le animano(le portano in vita) e danno loro ordini. Co-me potrebbe tutto ciò non entusiasmare unbambino di tre anni che muore dalla vogliadi onnipotenza? D’altro canto, dando ordi-ni ad una entità sufficientemente affidabile eintelligente da eseguirli i bambini imparanoanche a lasciar andare o a delegare. La dele-ga implica la distribuzione del controllo inquanto non appena l’artefatto esegue gli or-dini del bambino agisce per suo conto, fa-cendosi carico di una parte del lavoro.Il bambino piccolo può esplorare proble-matiche legate al controllo e alla negozia-zione e imparare giocando a conoscere il si-gnificato del bilanciamento fra prendere ilcontrollo e lasciarlo andare, aspetto crucia-le di qualsiasi tipo di transazione, sia con lepersone che con le cose.
Dar vita alle cose:creare/interagire/creareQuando costruiscono e giocano con coseche si comportano come se avessero una vo-lontà autonoma, i bambini più piccoli impa-rano a separare lo scopo dalla causa, o l’a-zione dalla causalità. Essi imparano i varimodi in cui oggetti, sia animati che inerti,incidono sul - e rispondono al - comporta-mento di ognuno di essi. Dotare gli ogget-ti di uno scopo e guardarli mentre fanno leloro cose è piacevole, in quanto, una voltacostruito, l’oggetto non solo si anima di vi-ta propria ma agisce in modi che non sonotipici di una cosa inerte, come per esempioseguire una luce, dare la caccia ad altre crea-ture o evitare ostacoli. Le creature sembra-no danzare fra di loro. Nonostante sianocose riescono a comportarsi come persone[Turkle, 1995].Il bambino giocando può esplorare la diffe-
renza fra un comportamento auto-guidatoe un comportamento indotto da altri, fraluoghi di controllo interni ed esterni. Egliinteragisce con nuove forme di intelligenza,diverse dalle proprie, conquistando cosìnuove intuizioni rispetto a ciò che significaessere vivi e intelligenti, essere una personao una cosa [Barchi et al, 2001].
Prendilo com’è/ModulaloAttraverso la modulazione di comporta-menti esistenti e l’adozione di un approccioalla creatività tipo “arte povera”, i bambinipiù piccoli diventano bricoleur invece di pia-nificatori, riparatori invece di creatori. In al-tre parole, essi “giocano allo psicologo” in-vece di “giocare all’ingegnere o al neuro-chirurgo”. Ciò non è affatto una brutta co-sa. La ricerca sugli stili di apprendimento in-dividuali nei bambini dimostra che l’esserein sintonia con le cose, o l’essere un ascolta-tore intelligente, è un punto di partenzatanto importante quanto lo è l’essere un ini-ziatore o un solista.In modo divertente il bambino può esplo-rare la complessità del passaggio dalla lettu-ra alla scrittura e apprezzare il bilanciamen-to fra riciclare ciò che è disponibile e parti-re da zero, fra il presentarsi come cantantesolista e il mescolarsi nel coro.Per concludere, i bambini più piccoli sonogeneralmente affascinati da oggetti chehanno l’aspetto di cose e tuttavia si com-portano come persone, o animali da com-pagnia. È proprio la natura ibrida di questiartefatti (vivi ma non del tutto) che consen-te loro di esplorare idee altrimenti pericolo-se, e cioè di correre rischi su un terreno si-curo.
A CHI PIACE PROGRAMMARE?Non a tutti i bambini piace programmareun computer. Non tutti sono a loro agio neldare istruzioni, anche a creature artificiali o,al contrario, nel creare cose che sfuggono alloro controllo. Non tutti i bambini amanoassemblare le loro creature cibernetiche, pernon parlare del loro smontaggio. Alcunipreferiscono controllare mentre altri prefe-riscono entrare nel flusso delle cose o muo-versi assieme ai loro giocattoli. Alcuni sonopiù strumentali mentre altri sono più rela-zionali, assomigliando nel loro stile a quelloche Turkle (1984) chiama “padronanzamorbida”.Nonostante queste differenze, la maggiorparte dei bambini più piccoli si diverte acreare cose e a dar loro vita, o ad “animar-le” in un modo o nell’altro. Ciò che varia è
53
Ambie
nti di
gioc
o pro
gram
mabil
i: cos
’è po
ssibil
e per
un ba
mbino
di qu
attro
anni?la quantità di costruzione o di “danza” con
l’oggetto, le metafore da cui traggono ispi-razione e gli scenari di gioco che più li en-tusiasmano. Abbiamo notato che, per ibambini molto piccoli, la strada potrebbeessere quella della programmazione comemodulazione di comportamenti esistenti,anche se ci si chiede se in questo caso si pos-sa ancora parlare di programmazione.Scenario 1:Osservazioni dalla Hennigan SchoolGuardando i bambini giocare conLEGO/Logo, abbiamo osservato ripetuta-mente che alcuni di essi si cimentano volen-tieri con la costruzione di giocattoli o veicolimeccanici, mentre altri sembrano più porta-ti alla creazione di “creature strane” o luoghiidonei a far vivere e muovere piccoli esseri. Lametafora industriale, con la sua panoplia dimotori e macchine, non li interessa. Preferi-scono rappresentare il gioco di creature ocreare sculture cinetiche straordinarie.È da notare che le abilità messe in atto inquesti progetti sono simili e, a prescindereda ciò che li mette in moto, tutti i bambinialla fine riescono ad animare le loro costru-zioni, a metterle in movimento (con i mo-tori) e a dar loro un’impressione di scopo(con i sensori). Tuttavia molte attività pro-poste nelle scuole e altrove continuano a ri-ferirsi al limitato mondo degli strumentimeccanici nel tentativo di motivare tutti ibambini coinvolti. Le osservazioni fatte sul-l’uso che i bambini fanno dei motori e deisensori fornisce un esempio particolarmen-te calzante di quanti e diversi concetti diestetica si sviluppano da modi diversi di rap-portarsi con il mondo.Scenario 2: Hennigan School(seguito dell’osservazione)Mentre la maggior parte dei bambini si en-tusiasma alla costruzione e alla guida dimacchine, altri (soprattutto le bambine)spesso preferiscono osservare l’evoluzione delleloro creature. A loro piace costruire, attivaree coinvolgere le loro creature come compagnedi giochi. La metafora organica (crearequalcosa che poi si muova separatamente)sembra catturare la loro immaginazione piùdi quanto non faccia la metafora industria-le (creare una macchina). Inoltre, dal puntodi vista delle differenze di genere, i bambinispesso amano smontare un meccanismo pervedere come funziona, mentre le bambinetalvolta esitano a fare a pezzi le cose e temo-no di non essere più in grado di ricomporle.Ma possono anche preferire conservarle intereper un’altra, e più rivelatrice, ragione: perpoter fare giochi di ruolo con le loro creazio-
ni, fantasticare con loro, trattarle come per-sonaggi della fantasia. Analizzarle e smon-tarle non è cosa che a loro piaccia.Dato che i bambini che cerchiamo di coin-volgere appartengono a sessi diversi, e pro-babilmente anche a classi sociali e gruppi et-nici diversi, è sensato fornire un vasto assor-timento di materiali che rispondano a este-tiche e gusti diversi. La diversità qui implicauna libertà reale di scegliere fra alternative emodi di fare diversi. Diversi strumenti e me-dia sono percepiti in modo diverso: l’argillaal tatto è diversa dal legno, i camion giocat-
TD
27
num
ero
3-20
02
54
TD
27
num
ero
3-20
02Am
bienti
di gi
oco p
rogr
amma
bili: c
os’è
possi
bile p
er un
bamb
ino di
quatt
ro an
ni? tolo suscitano sensazioni diverse rispetto al-le scatole musicali o ai pupazzi animati. Equesti diversi strumenti e media consento-no la creazione e l’espressione di diversi tipidi cose, le quali assumono significati diversia seconda delle persone. Più vasta sarà lagamma degli strumenti, dei media e delleattività, maggiori saranno le possibilità dicostruire un prodotto dal significato perso-nale.
IN QUALI CIRCOSTANZELA PROGRAMMAZIONEPUO ESSERE UN’ESPERIENZAPROFICUA PER UN BAMBINO DIQUATTRO ANNI?Papert sostiene che non si debba insegnareai bambini la programmazione fine a se stes-sa, ma piuttosto ad usare le conoscenze le-gate alla programmazione per creare conte-sti dove si possano presentare altre occasio-ni di apprendimento piacevole. Inoltre, ibambini dovrebbero cimentarsi nella pro-grammazione solo se riescono a trarne qual-cosa sul momento e non dopo, quando sa-ranno grandi! La gratificazione deve essereimmediata, il che non significa che i ragazzinon dovranno fare molto lavoro, o moltafatica, per svolgere la loro attività. In gene-re, il “gioco difficile” è più stimolante per ibambini che possono passare ore su una co-sa quando questa li interessa veramente.Le tecnologie digitali, in questo caso i kit digioco programmabili, sono media interatti-vi attraverso i quali i bambini possono espri-mere le loro idee e sentimenti in modi nuo-vi. Quindi il punto non è quale sia l’effettodella programmazione o dell’uso dei com-puter sull’apprendimento, per esempio,della scrittura o della matematica. Dovrem-mo piuttosto chiederci: i computer e le altretecnologie digitali possono fornire nuovestrade per l’apprendimento e il gioco, perl’esplorazione, espressione e condivisione diidee altrimenti non affrontabili? Nei lorogiochi, ai bambini piace rappresentareun’ampia gamma di scenari, dal controllounilaterale al dialogo, dal costruire allosmontare. Ciononostante, a bambini diver-si in contesti diversi piace fare queste cose inmodi diversi. E con il tempo le preferenzepossono trasformarsi in stili personali.Come abbiamo visto, gli ambienti di giocostessi possono presentare limitazioni intrin-seche o distorsioni se la loro forma esteticae le possibilità costruttive coincidono congli stereotipi prevalenti, o favoriscono certistili di apprendimento a discapito di altri.Per esempio, i mattoncini LEGO favorisco-
no le strutture ortogonali e facilitano le co-struzioni verso l’alto, le strutture verticali.Bisogna lavorare sodo per fare oggetti conlati ricurvi. Oppure, i kit del tipo fare-disfa-re-rifare in generale favoriscono il costruiree disfare cose piuttosto che entrare in rela-zione con questi materiali. Queste sono lepossibilità ed i valori estetici previsti dai setdi costruzione classici. Un altro tipo di distorsione riguarda l’im-posizione da parte dei progettisti, degli in-segnanti o dei genitori del loro punto di vi-sta su che cosa dovrebbe essere costruito e co-me i bambini dovrebbero interagire con leloro creazioni. Mi riferisco qui a tutte le no-stre credenze inespresse sul modo giusto difare le cose che possono catturare l’immagi-nazione di alcuni e bloccare invece altri. Lenostre osservazioni sui bambini che pro-grammano ci dicono che la maggior partedi essi gradisce l’idea di animare cose ed èfelice di usare i computer per programmarele sue creazioni. Ciononostante, non tutti ibambini si divertono allo stesso modo a farcorrere le automobili, o a coltivare il giardi-no, a dare ordini ai loro robot o a muoversiassieme alle loro creature. Diversi scenari digioco divertono menti diverse.La manipolazione di oggetti è sicuramenteun’attività importante per i bambini, ma sel’obiettivo dell’educatore o del ricercatoreè di offrire opportunità per progettare ecreare comportamenti allora la richiesta dilavoro sulle parti meccaniche (ad esempio,la costruzione del corpo di una creatura)dovrebbe essere minimizzata a favore dellavoro più “simbolico” e “cibernetico” didescrivere, pilotare, controllare, comanda-re i comportamenti di una costruzione. Sesi segue questa pista, bisogna ampliare leparti manipolative di un kit includendo ipezzi di un ambiente di programmazionetangibile dove programmare è connettere itasselli fisici del linguaggio di controlloche, in sintonia con il termine “mattoncinoprogrammabile”, chiamo “mattoncinocomportamentale”. Un mattoncino com-portamentale ha una doppia funzione: co-mandare/ controllare un oggetto dandoglidelle istruzioni da eseguire; fornire un lin-guaggio descrittivo per riflettere su e/omodellare l’oggetto (la creatura) con cui siè in relazione. In termini psicologici, que-sto significa aiutare i bambini a dare vita al-le parole facendole diventare chiavi cheaprono le porte dei mondi che esse evoca-no. Significa ridare poteri evocativi e crea-tivi alle parole.Io concluderei così: offriamo materiali ric-
55
TD
27
num
ero
3-20
02Am
bienti
di gi
oco p
rogr
amma
bili: c
os’è
possi
bile p
er un
bamb
ino di
quatt
ro an
ni?chi e diversificati e immaginiamo una vastagamma di scenari di gioco capaci di cattu-rare la fantasia dei bambini più diversi e lo-ro faranno tutto il resto.
RINGRAZIAMENTISono grata ad Augusto Chioccariello, Stefa-nia Manca e Luigi Sarti per l’invito a scrive-re un articolo insieme; a Seymour Papert,Fred Martin, David Cavallo e tutti i colleghidel “Future of Learning Group” del MITMedia Lab per avermi dato l’occasione di
approfondire il significato dell’attività diprogrammazione; a Mike Ananny per “Tell-Tale”; alla LEGO A/S e al LEGO LearningInstitute, in particolare a Rolf Andreas Wi-gand, Daniele Bresciani, Martin Rausch eTom Christensen, che mi hanno aiutato,ciascuno con le sue specificità, a ripensare ibenefici della programmazione per i bambi-ni piccoli in contesti di gioco (progetto“Early Computation”).
(traduzione di Giovanna Caviglione)
Ackermann E. (1991), The“Agency” Model of Tran-sactions: Toward an Un-derstanding of Children’sTheory of Control, in Ha-rel I. & Papert S. (eds),Constructionism, AblexPublisher, Norwood, NJ.
Ackermann E. (2000),Relating to things thatthink: Animated toys, ar-tificial creatures, avatars,I3 Magazine: The Euro-pean Network for Intelli-gent Information Interfa-ces, n. 8, July, pp. 2-5.
Ackermann E., ArchintoF. (2001), Giochi lingui-stici, scrittura digitale, al-fabetizzazioni emergenti,TD – Tecnologie Didatti-che, n. 24, pp. 41-54.
Ananny M. (2001), Tel-ling Tales: Supportingwritten literacy with com-putational toys, Unpubli-shed Master Thesis, TheMIT Media Laboratory,Cambridge, MA.
Barchi P., Cagliari P., Gia-copini E. (2001), Encoun-ters between children androbotics, in Askildsen T.,Barchi P., Cagliari P.,Chioccariello A., Giacopi-ni E., Gustafsson B., LindhJ., Manca S., Rausch M.,Sarti L., Construction kitsmade of Atoms and Bits.Research findings & per-spectives, CAB Del. 25,http://cab.itd.ge.cnr.it/public/deliverables/book-let/booklet-CRE.pdf
Brandes A. (1996), Ele-mentary School Children’sImages of Science, in Ka-fai Y. B., Resnick M. (eds),Constructionism in Practi-ce: Designing, Learningand Thinking in a DigitalWorld, Lawrence ErlbaumAssociates, Hillsdale, NJ.
Cassell J., Ryokai K.(2001), Making Space forVoice: Technologies toSupport Children’s Fanta-sy and Storytelling, Perso-nal Technologies, 5(3),pp. 203-224.
Chioccariello A., MancaS., Sarti L. (2002), La fab-brica dei robot, TD Tecno-logie Didattiche, n. 27,pp. 56--67.
Granott N. (1991), Puzz-led Minds and WeirdCreatures: Phases in theSpontaneous Process ofKnowledge Construction,in Harel I. & Papert S.(eds), Constructionism,Ablex Publisher, Norwood,NJ, pp. 295-311.
Maeda J. (2000), Designby numbers, The MITPress, Cambridge, MA.
Martin F. G. (1988), Chil-dren, cybernetics, andprogrammable turtles,Unpublished Master’s the-sis, Department of Mecha-
nical Engineering, MIT,Cambridge, MA.
Papert S. (1980), Mind-storms: Children, Compu-ters, and Powerful Ideas,Basic Books, New York.
Papert S. (1993), TheChildren’s Machine:Rethinking School in theAge of the Computer, Ba-sic Books, New York.
Resnick M., Berg R., Eisen-berg M. (2000), BeyondBlack Boxes: BringingTransparency and Aesthe-tics Back to Scientific Inve-stigation, Journal of theLearning Sciences, vol. 9,n. 1, pp. 7-30 (tr. it. inquesto numero).
Turkle S. (1984), The Se-cond Self: Computers andthe Human Spirit, Simonand Schuster, New York.
Turkle S. (1995), Life onthe Screen: Identity in theAge of the Internet, Simonand Schuster, New York.
riferimenti bibliografici
INTRODUZIONEL’importanza ed il ruolo fondamentale chegli oggetti materiali rivestono nel comples-so percorso della costruzione della cono-scenza sono stati sottolineati soprattutto dalCostruzionismo [Papert, 1980; Harel e Pa-pert, 1991]. Questa teoria accetta la tesi difondo del Costruttivismo, secondo cui leconoscenze non sono il riflesso del mondoesterno né la proiezione sulla realtà dellestrutture innate della mente, ma derivanoda costruzioni successive con costante ela-borazione di strutture nuove [Piaget,1975]. Il costruzionismo, inoltre, rivaluta ilpensiero concreto, visto non come una ver-sione “inferiore” del ragionamento astratto,ma posto sul suo stesso piano [Turkle e Pa-pert, 1992]. La tradizionale impostazioneoperativo-esperienziale secondo cui si impa-ra facendo [Dewey, 1910], attraverso unacostante interazione dialettica con strumen-ti che “veicolano” gli oggetti della cono-scenza, è stata, quindi, produttivamente in-tegrata con la valenza imprescindibile che lacostruzione di oggetti ha nell’apprendimen-to: la conoscenza è il risultato di un impe-gno attivo col mondo attraverso la creazio-ne e manipolazione di artefatti (tangibili eno), siano essi castelli di sabbia, programmidi computer, costruzioni LEGO, composi-zioni musicali, ecc., che rivestano un parti-colare significato personale e che siano so-prattutto oggetti su cui riflettere [Papert,1993]1.In sintonia con gli orientamenti prevalentidel costruttivismo sociale (cfr. ad esempio[Salomon, 1993; Pontecorvo et al, 1995]),un’altra componente sottolineata dal co-
struzionismo è quella dell’importanza dellanegoziazione nel mondo sociale come partecruciale dello sviluppo cognitivo del bambi-no. L’apprendimento e l’intelligenza nonsono, quindi, titolarità esclusiva del singoloindividuo che apprende, ma emergonopiuttosto dall’interazione sociale in cuigruppi di individui intrattengono rapportidi natura collaborativa finalizzati alla co-struzione di conoscenze comuni e condivi-se [Resnick, 1996]. Questa dimensione so-ciale dell’apprendimento può ben essererappresentata da quei contesti ludici ededucativi che vedono il bambino a strettocontatto con suoi pari e con soggetti piùgrandi di lui, in grado di fornire supporto emotivazione nell’affrontare compiti cogni-tivi nuovi e non precedentemente affronta-ti, che siano però alla sua portata (la cosid-detta “zona di sviluppo prossimale”) [Vy-gotskij, 1978].Tra le proposte di ambienti di apprendi-mento elaborate nel tempo alla luce delleindicazioni costruzioniste, va senz’altro ri-cordato il linguaggio Logo, finalizzato a in-coraggiare lo sviluppo di forme di pensieroprocedurale ed operativo attraverso l’uso disemplici programmi come blocchi di co-struzioni per altri più complessi [Papert,1980]. La programmazione al computer,vista come una delle forme più alte di stru-menti attraverso cui “pensare sul pensare”(l’atteggiamento dell’epistemologo), assol-ve a questo compito in due modi importan-ti: “Primo, il computer permette, anzi ob-bliga, il bambino ad esternare le proprieaspettative intuitive. Quando l’intuizione ètradotta in un programma diventa più evi-
56
TD
27
num
ero
3-20
02La
fabb
rica d
ei ro
bot
La fabbrica dei robotBambini che costruisconoe programmano con un ambiente visivo
■ Augusto Chioccariello, Stefania Manca, Luigi SartiITD-CNR, Genova{augusto, manca, sarti}@itd.ge.cnr.it
1Per un’analisi approfon-dita dei caratteri del co-struzionismo papertianosoprattutto in relazioneall’eredità piagetiana siveda [Ackermann, 2001].
2Tra le numerose evolu-zioni di Logo che si sonosuccedute nel tempo ciinteressa particolarmentericordare LEGO/Logo,un’estensione del Logoche consente di collegaresensori e motori LEGOad un PC [Resnick eOcko, 1991; Resnick,1991]. LEGO/Logo èstato il progenitore diuna famiglia di linguaggiper il controllo di robot.
dente ed accessibile alla riflessione. Secon-do, le idee computazionali possono essereadottate come materiali per rimodellare laconoscenza intuitiva” [Papert, 1980].La programmazione è anche al centro delleproposte più recenti2, i robot e i mattonciniprogrammabili, che occupano oggi unospazio di particolare interesse. Modificandoil modo di pensare al vivente e collocandosidi fatto al confine tra animato e inanimato,tra vivente e non vivente [Turkle, 1984,1995], possono essere giocattoli con cuiimparare nuovi modi di pensare [Resnick etal, 1996], che stimolano nuove riflessionisul rapporto tra vita e tecnologia [Martin etal, 2000], tra la scienza e l’apparato stru-mentale di cui si serve per gli esperimenti[Resnick et al, 2000], tra le attività di pro-gettazione di tipo robotico e i valori e l’i-dentità [Bers e Urrea, 2000]. È anche gra-zie ad oggetti come questi che, sostengonoi fautori del costruzionismo, concetti tradi-zionalmente considerati appannaggio di in-dividui adulti, in grado di manipolare cono-scenza simbolica ed astratta, possono diven-tare accessibili e comprensibili anche daibambini.I mattoncini programmabili, che storica-mente si rifanno ai primi esperimenti di Pa-pert con una concretizzazione delle ideeesplorate con il Logo, sono approdati ad unprodotto commerciale, il LEGO® MIND-STORMS™ Robotic Invention System, unkit per realizzare robot e altre costruzionicibernetiche3.Questo articolo racconta alcune delle atti-vità di ricerca condotte nell’ambito del pro-getto “Construction kits made of Atoms &Bits” (CAB)4 che, utilizzando il LEGOMindStorms, si è posto l’obiettivo di stu-diare le relazioni e gli atteggiamenti deibambini della scuola dell’infanzia e delleprime classi della scuola elementare (daquattro a otto anni) nei confronti di ogget-ti in grado di esibire comportamenti auto-nomi e interattivi. In particolare CAB hasperimentato una metodologia atta a favori-re l’interazione tra bambini e computer at-traverso l’uso di costruzioni cibernetiche(figura 1), con lo scopo di esplorare la dina-mica dei processi di apprendimento cheemergono e di ridisegnare il kit nell’otticadi adeguarlo a questa fascia d’età.Ma perché il LEGO MindStorms? Che co-sa accade quando un prodotto pensato perragazzi dai dodici anni in su diventa unaproposta educativa per bambini di cinqueanni di età? Come legittimare una scelta pe-dagogica di questa natura? Quali cambia-
menti introdurre? Come intervenire suglistrumenti e sul contesto?All’interno di CAB si è cercato di dare ri-sposte a questi interrogativi, ad esempio at-traverso l’ampliamento delle funzioni assol-vibili dal robot, la ricerca di soluzioni desti-nate a ridurre la complessità meccanica de-gli artefatti e la definizione di un ambientedi programmazione fortemente orientatoalle esigenze che emergono nei diversi con-testi costruttivi.Nel seguito dell’articolo descriveremo alcu-ni di questi aspetti, con particolare riguardoalle problematiche emerse nella progetta-zione dell’ambiente software e alle implica-zioni che le scelte operate hanno avuto sul-la progettualità dei bambini. La prossimesezioni illustrano, inoltre, la metodologia diricerca adottata e le ragioni e modalità chehanno guidato la ridefinizione del kit. Lesezioni finali sono dedicate ad esporre alcu-ne esperienze realizzate con i bambini e aprospettare possibili linee di sviluppo del-l’approccio5.
PARTIRE DALL’ESISTENTEPER RIPROGETTARE IL NUOVO
«Cercare di fare un buon progetto signifi-ca soprattutto avere un’attesa già inqualche modo pertinente e preformata.»
[Malaguzzi, 1995: pag. 99]
Il progetto CAB ha privilegiato un approc-cio che ha inserito le attività dei bambinicon i mattoncini programmabili nel conte-sto e prassi di lavoro quotidiani, affiancan-dosi spesso ad altri lavori già in corso. Que-sta scelta è stata fortemente ancorata alla
57
TD
27
num
ero
3-20
02La
fabb
rica d
ei ro
bot
figura 1Alcuni bambini giocanocon un robot che disegnasul pavimento.
3Per una ricostruzionestorica del percorso evo-lutivo che ha condotto alLEGO MindStorms siveda [Martin et al,2000].
4CAB è stato un progettofinanziato dall’UnioneEuropea nell’ambito delprogramma ESPRIT, ini-ziativa i3-ExperimentalSchool EnvironmentsProgramme, che ha vistola partecipazione del Co-mune di Reggio Emilia,della Jönköping Univer-sity (Svezia), dell’ITD-CNR e della LEGO Dac-ta A/S. Ulteriori infor-mazioni possono essererintracciate alla URLhttp://cab.itd.ge.cnr.it/
5Descrizioni complemen-tari ed approfondite di al-cuni aspetti qui trattatisinteticamente sono re-peribili nella documenta-zione del progetto[Askildsen et al, 2001a;Askildsen et al, 2001b;CRE, 2001; Gustafsson eLindh, 2001].
tradizione delle scuole dell’infanzia di Reg-gio Emilia, in cui l’attenzione è sempre ri-volta alla predisposizione delle situazioniche facilitano il lavoro dei bambini, profon-damente radicato in situazioni progettualidi ampio respiro (in termini di problemati-che affrontate e di tempo da dedicare) e incui l’adulto interviene il meno possibile masa ascoltare e documentare quello che acca-de cercando di mantenere alta la motivazio-ne dei bambini [Malaguzzi, 1995]. L’otticadella sperimentazione è stata, quindi, da unlato, quella di guardare agli strumenti ludi-ci e cognitivi come profondamente legati alcontesto d’uso e alla cultura che danno lorosignificato. Dall’altro, quella di guardare al-l’apprendimento come a un evento socialeprofondamente condiviso e contestualizza-to in cui bambini ed adulti lavorano assiemee in cui i bambini ricevono sostegno e sup-porto (scaffolding) dagli adulti nel loro la-voro di esplorazione [Wood et al, 1976].I requisiti per la riprogettazione del kit so-no stati elicitati dai bambini attraverso ilruolo di mediazione degli adulti6. Il dialogotra insegnanti, atelieristi, pedagogisti e pro-gettisti hardware e software è stato ancora-to alla documentazione del lavoro dei bam-bini che veniva progressivamente prodottadalle scuole coinvolte nel progetto. Ogniattività è stata adeguatamente monitorata edocumentata in una varietà di formati (testi,immagini, filmati, ecc.) dagli insegnanti im-pegnati nella quotidianità del loro lavoro7.Attraverso le considerazioni e le interpreta-zioni effettuate dagli adulti sulla base delleproblematiche emerse nel lavoro coi bambi-ni, è stato possibile prendere in seria consi-derazione le “teorie”, seppur provvisorie,
che i bambini elaboravano sulla base deiprogetti realizzati con il LEGO Mind-Storms e con le successive versioni modifi-cate del kit.
RIPROGETTARE IL KITUna scatola di costruzioni, in funzione deicomponenti offerti, privilegia certe tipolo-gie di attività a scapito di altre. Il LEGOMindStorms è progettato per incoraggiarela costruzione di “Veicoli”, robot mobiliche si muovono e interagiscono con l’am-biente. Per favorire lo sviluppo di altri sce-nari d’uso sono state proposte ulteriori ti-pologie quali le “Costruzioni Animate”(che pur non esplorando l’ambiente posso-no prevedere parti che si muovono), i “Pu-pazzi Cibernetici” (una specializzazionedelle costruzioni animate ispirate ai Furby8,ma smontabili e modificabili), i “Weara-bles” (dispositivi indossabili, quali distintiviinterattivi)9.Per i Veicoli e le Costruzioni Animate, cheprevedono la presenza di parti meccanichein movimento, abbiamo dovuto affrontaresoprattutto la complessità di assemblaggio:il kit commerciale usa il LEGO Technic, unsistema che offre notevoli potenzialità co-struttive ma risulta impegnativo anche pergli adulti. La soluzione adottata, privile-giando l’immediatezza d’uso a scapito dellacreatività costruttiva, è stata quella di predi-sporre moduli meccanici pronti per l’uso[vedi figura 2], quali uno chassis di veicolocon tre sistemi di locomozione modulari(ruote, cingoli, “zampe”), varie strutture dimontaggio di sensori e attuatori10. Moduliper costruzioni animate che realizzano mo-vimenti particolari includono un nastro tra-sportatore, una torretta rotante per orienta-re il mattoncino programmabile, un bracciomeccanico, ecc.L’uso di tipologie di costruzione diverse daiVeicoli consente l’esplorazione di compor-tamenti reattivi che si inquadrano, ad esem-pio, nel contesto della narrazione di storie,dove abbiamo osservato che i bambini ten-dono a combinare diversi materiali costrut-tivi (LEGO, carta, stoffa, creta). In questiscenari la riduzione di complessità meccani-ca permette ai bambini di esprimere la pro-pria creatività e di affrontare da subito la de-finizione dei comportamenti. Ne è conse-guita la necessità di affrontare la progetta-zione di nuove componenti per ampliare letipologie di costruzioni possibili: un regi-stratore di suoni, una catena di luci, un sen-sore di piegamento, un sensore di suono eun trasmettitore a raggi infrarossi. Nel se-
58
La fa
bbric
a dei
robo
t
figura 2Un veicolo, realizzatocon moduli pre-assem-blati, che reagisce agliostacoli e lascia tracciadel proprio percorso.
TD
27
num
ero
3-20
02
guito descriviamo in dettaglio uno di questicomponenti.Ai bambini piace aggiungere voci e suoniregistrati alle loro costruzioni realizzate alcomputer. È emersa pertanto la necessità diun piccolo registratore digitale in grado didare “voce” ai robot costruiti. Dal punto divista del rapporto design-funzionalità, ab-biamo ritenuto opportuno prevedere un’in-terfaccia operativa indipendente dal mat-toncino programmabile: un pulsante per re-gistrare e uno per riprodurre il suono postisul registratore stesso. Il prototipo realizza-to permette di registrare due brevi messag-gi e può essere controllato sia manualmenteche da software. L’esperienza con i bambiniha, però, mostrato l’esigenza di aumentaresia il numero che la durata dei messaggi.Un’alternativa possibile è quella di privile-giare la trasparenza dell’interfaccia associan-do un solo componente ad ogni messaggio.Se si vogliono messaggi più lunghi è suffi-ciente collegare i registratori tra di loro insequenza [Ananny, 2001], consentendo lacostruzione di una storia attraverso la mani-polazione dell’ordine dei registratori. Inquesto modo sono possibili progetti concomplesse interazioni tra sensori e sequenzesonore: per esempio, i bambini possonoprogettare un “muro dei suoni” che ripro-duca sequenze diverse se fa caldo, se si toc-ca un punto sensibile, se due mattoncini siscambiano un segnale, ecc. Proporre le stes-se possibilità per lo scenario dei Veicoli po-ne vincoli costruttivi sulle dimensioni e pe-so dei componenti, che portano non a mol-tiplicare i registratori, ma a progettarne unopiccolo, complesso e flessibile anche se for-se più opaco nel suo design.
DEFINIRE GLI STRUMENTIDELLA PROGRAMMAZIONERendere accessibili ai bambini gli strumentidi controllo del comportamento di una co-struzione cibernetica è un problema aperto.Programmare non è facile e molti pensanoche sia un attività da delegare a specialisti: sequesto fosse vero dovremmo abbandonarel’idea di un kit di costruzioni e limitarci allaprogettazione di giocattoli cibernetici conun grado forse elevato di interattività, masostanzialmente non modificabili dai bam-bini. Noi pensiamo invece che una versionedi programmabilità, purché supportata dastrumenti (ambiente, linguaggio, ecc.) spe-cializzati nella direzione delle caratteristichedel problema da risolvere, sia possibile an-che per i non programmatori.Sviluppare strumenti che consentano a per-
sone non particolarmente esperte né inte-ressate ad approfondire la disciplina del-l’informatica di istruire il computer a risol-vere specifici problemi è un’area di ricercafiorente. In particolare, gli studi di BonnieNardi (1993) indicano che utenti esperti inun dominio, o motivati a praticarlo, riesco-no ad apprendere e gestire linguaggi forma-li adeguati a quel dominio. Ne sono esem-pio una classe di strumenti come i fogli elet-tronici o gli ambienti di analisi statistica cheforniscono un linguaggio di programma-zione usabile per estendere le funzionalitàdel sistema. Strumenti di questo tipo hannoconsentito lo sviluppo di una popolazionedi utenti che, a diversi livelli di competenza,usano le funzionalità di programmazionedisponibili.Trasferire queste considerazioni nel mondodei bambini implica, innanzitutto, ipotizza-re che per loro sia possibile gestire il livellodi complessità insito nel controllo del com-portamento di un robot. Se questa ipotesi èverificata, ha senso porsi il problema di co-struire un ambiente di programmazione perbambini. Nell’ambito del progetto CAB ab-biamo verificato che i bambini riescono ainteragire con costruzioni robotiche laddo-ve il contesto sia ben strutturato (approfon-diremo queste considerazioni nella sezionededicata ad alcune esperienze realizzate).Ma qual è il modello concettuale più ade-guato alla definizione dei comportamenti diun robot? Vediamo un esempio. Vogliamoche un veicolo giri intorno a un baule a ba-se quadrata. Un neofita tenderebbe a impo-stare la soluzione come se avesse a disposi-zione un’automobile controllata con un te-lecomando, e dal punto di vista della pro-grammazione ad adottare uno stile impera-tivo, proponendo la seguente soluzione:“Vai avanti di un lato”, “Gira a sinistra di 90gradi” e “Ripeti queste due istruzioni pergli altri tre lati”, nello stile della tartarugaLogo. Ma i robot sono dotati di sensori checonsentono di “percepire” l’ambiente cir-costante e reagire di conseguenza: pro-grammare un robot implica così gestire piùsensori contemporaneamente in tempo rea-le. Il modello imperativo di programmazio-ne, che è adeguato ad un ampio spettro disituazioni (calcolo scientifico, gestionale,ecc.), mostra così la corda nel contesto del-la programmazione di robot [Resnick,1991; Papert, 1993].Se aggiungiamo, ad esempio, al nostro vei-colo un sensore di contatto possiamo af-frontare il problema in modo radicalmentediverso, simulando il comportamento di
59
TD
27
num
ero
3-20
02La
fabb
rica d
ei ro
bot
6Nell’ambito della ricercasul design esistono tradi-zioni, quali il Cooperati-ve Design [Greenbaum eKyng, 1991] o il Partici-patory Design [Schuler eNamioka, 1993], checoinvolgono gli utenti findalle fasi iniziali di pro-gettazione degli artefatti.Nel Participatory Designesistono attualmente al-cuni approcci metodolo-gici, quali quello delChildren as Informant[Scaife e Rogers, 1999] odel Cooperative Inquiry[Druin, 1999, 2002],che vedono la partecipa-zione attiva e paritaria deibambini (di età 7-11 an-ni) nelle fasi di ideazionee progettazione.
7Sulla metodologia di do-cumentazione utilizzatasi veda [Rinaldi, 1995].
8Furby™ è un peluche tec-nologico che richiedel’attenzione e le cure diun bambino. Se accudito,si comporta bene e lenta-mente passa dalla sua lin-gua (il furbese) a quelladel bambino.
9Non tutte le propostehanno incontrato lo stes-so favore e gradimentotra i bambini e gli educa-tori, incoraggiando quin-di una revisione profondao in certi casi l’accanto-namento. Quest’ultimo èstato il caso dei PupazziCibernetici che hannosuscitato più perplessitàche non adesione tra gliinsegnanti ed educatori,convinti di fornire unaproposta pedagogica-mente discutibile.
10Gli attuatori sono dispo-sitivi di ouput, quali imotori.
chi, trovandosi al buio, debba circumnavi-gare un ostacolo seguendone il contornocon la mano. Il programma viene costruitomettendo in relazione le informazioni chepervengono dai sensori con i comandi da fareseguire ai motori. Costruire con pezzi LE-GO un robot che “tasta” il muro mentreavanza è complesso; risulta più semplice faroscillare tutto il veicolo in modo che vadaavanti a zig-zag: il robot si allontana dalmuro quando il sensore lo tocca e si riavvi-cina quando perde il contatto. La relazionetra input e output sarà quindi: “se il senso-re tocca, accendi il motore dal suo lato espegni quello dal lato opposto; se non toc-ca, spegni il motore dal suo lato e accendiquello dal lato opposto”.Questo tipo di soluzione offre una serie divantaggi su quella imperativa: il comporta-mento emerge dall’interazione tra il robot el’ostacolo indipendentemente dalla sua for-ma o dalle sue dimensioni. Inoltre, questoapproccio consente, con minime modifichemorfologiche, di risolvere anche altri proble-mi: ad esempio, se volessimo far seguire al ro-bot una linea sul pavimento11, sarebbe suffi-ciente sostituire il sensore di contatto conuno di luce mantenendo inalterata la struttu-ra del programma. Il robot seguirà a zig-zagil contorno della linea. In tutti questi casi,piuttosto che rappresentare nel programmala mappa della realtà, è lo stesso “campo digioco” che funziona da mappa di sé stesso[Brooks, 1991]. In tutte le situazioni in cuinon sono note a priori le caratteristiche del-l’ambiente (la forma e le dimensioni dell’o-stacolo, il tracciato della linea, ecc.) al robotè richiesta una dimensione di adattività con-seguibile grazie all’uso di sensori.
L’orientamento al dominioSi è scelto di rappresentare i comportamen-ti dei robot per mezzo di regole composteda condizioni per i sensori e da azioni pergli attuatori. Una regola associa una condi-zione (un test sullo stato di un sensore) auna sequenza di azioni (comandi per gli at-tuatori): ad esempio, “Se il sensore di lucerileva un valore elevato di luminosità alloraaccendi il motore”. La facilità d’uso di que-sto sistema a regole dipende dalla disponi-bilità di condizioni e azioni che incapsulinoi dettagli del funzionamento dell’hardwaree siano direttamente operativi. A sua volta,l’usabilità di condizioni e azioni dipende daassunzioni sul tipo di costruzione: ad esem-pio, un veicolo con due motori può muo-versi avanti e indietro, girare a destra e a si-nistra. Ciò permette di definire comandi peril veicolo analoghi a quelli della tartarugadel Logo. Quindi, per ogni tipologia di co-struzione, l’ambiente di programmazionemette a disposizione una serie di primitive(condizioni e azioni) specializzate.Il comportamento complessivo di una co-struzione emerge dalla composizione dicomportamenti elementari che agiscono inmaniera indipendente, ma concomitante.Per esempio, un veicolo con sensori di con-tatto che si muove reagendo ad eventualiostacoli può essere controllato da due com-portamenti: il primo dice al veicolo di muo-versi in avanti; se si incontra un ostacolo, in-terviene un secondo comportamento perdire al robot di indietreggiare e girare nelladirezione opposta al lato dell’urto. Il com-portamento può essere costruito e provatoin maniera incrementale ed indipendentenelle sue componenti. Nel caso in cui piùcomportamenti governino contemporanea-mente uno stesso attuatore un meccanismodi priorità decide chi detiene il controllodelle azioni. Nell’esempio del veicolo che simuove tra gli ostacoli, il comportamentoche gestisce gli urti è prioritario su quelloche controlla il movimento in avanti del vei-colo [figura 3].L’ambiente di programmazione si presentainnanzitutto come un laboratorio di pro-getti, che ospita sia la galleria di quelli giàesistenti che la possibilità di definirne unonuovo. Un progetto, a sua volta, contienesia i programmi che la documentazionemultimediale del lavoro (foto, filmati, com-menti sonori, testi) ed è composto da una opiù costruzioni. L’ambiente permette didefinire tipologie diverse di costruzioni persostenere la specializzazione delle compo-nenti (comportamenti, condizioni e azio-
60
La fa
bbric
a dei
robo
t
figura 3Una rappresentazioneschematica di un veicolocon due sensori di con-tatto. Il menu dei com-portamenti è seleziona-to, permettendo di sce-gliere tra i comporta-menti disponibili appro-priati alla configurazio-ne corrente di input eoutput o la definizionedi uno nuovo.
TD
27
num
ero
3-20
02
11Per una descrizione det-tagliata sul funzionamen-to del sensore di luce, siveda [Giordano, 2002]in questo numero.
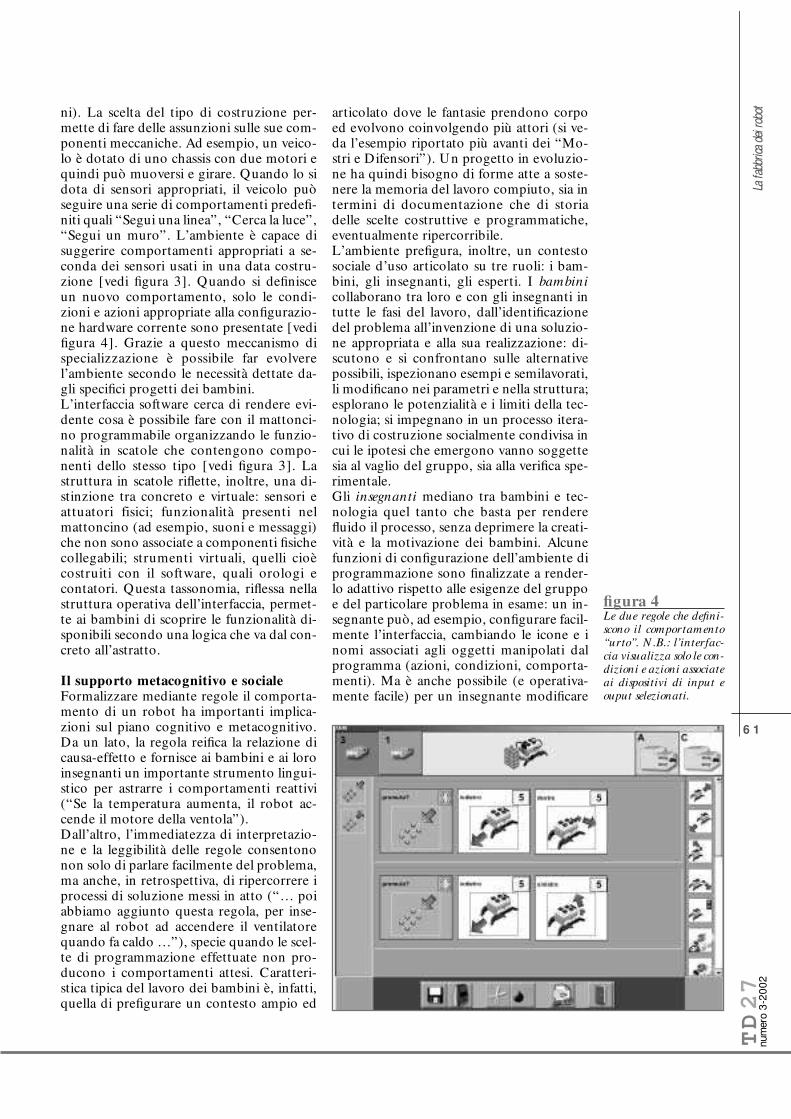
ni). La scelta del tipo di costruzione per-mette di fare delle assunzioni sulle sue com-ponenti meccaniche. Ad esempio, un veico-lo è dotato di uno chassis con due motori equindi può muoversi e girare. Quando lo sidota di sensori appropriati, il veicolo puòseguire una serie di comportamenti predefi-niti quali “Segui una linea”, “Cerca la luce”,“Segui un muro”. L’ambiente è capace disuggerire comportamenti appropriati a se-conda dei sensori usati in una data costru-zione [vedi figura 3]. Quando si definisceun nuovo comportamento, solo le condi-zioni e azioni appropriate alla configurazio-ne hardware corrente sono presentate [vedifigura 4]. Grazie a questo meccanismo dispecializzazione è possibile far evolverel’ambiente secondo le necessità dettate da-gli specifici progetti dei bambini.L’interfaccia software cerca di rendere evi-dente cosa è possibile fare con il mattonci-no programmabile organizzando le funzio-nalità in scatole che contengono compo-nenti dello stesso tipo [vedi figura 3]. Lastruttura in scatole riflette, inoltre, una di-stinzione tra concreto e virtuale: sensori eattuatori fisici; funzionalità presenti nelmattoncino (ad esempio, suoni e messaggi)che non sono associate a componenti fisichecollegabili; strumenti virtuali, quelli cioècostruiti con il software, quali orologi econtatori. Questa tassonomia, riflessa nellastruttura operativa dell’interfaccia, permet-te ai bambini di scoprire le funzionalità di-sponibili secondo una logica che va dal con-creto all’astratto.
Il supporto metacognitivo e socialeFormalizzare mediante regole il comporta-mento di un robot ha importanti implica-zioni sul piano cognitivo e metacognitivo.Da un lato, la regola reifica la relazione dicausa-effetto e fornisce ai bambini e ai loroinsegnanti un importante strumento lingui-stico per astrarre i comportamenti reattivi(“Se la temperatura aumenta, il robot ac-cende il motore della ventola”).Dall’altro, l’immediatezza di interpretazio-ne e la leggibilità delle regole consentononon solo di parlare facilmente del problema,ma anche, in retrospettiva, di ripercorrere iprocessi di soluzione messi in atto (“… poiabbiamo aggiunto questa regola, per inse-gnare al robot ad accendere il ventilatorequando fa caldo …”), specie quando le scel-te di programmazione effettuate non pro-ducono i comportamenti attesi. Caratteri-stica tipica del lavoro dei bambini è, infatti,quella di prefigurare un contesto ampio ed
articolato dove le fantasie prendono corpoed evolvono coinvolgendo più attori (si ve-da l’esempio riportato più avanti dei “Mo-stri e Difensori”). Un progetto in evoluzio-ne ha quindi bisogno di forme atte a soste-nere la memoria del lavoro compiuto, sia intermini di documentazione che di storiadelle scelte costruttive e programmatiche,eventualmente ripercorribile. L’ambiente prefigura, inoltre, un contestosociale d’uso articolato su tre ruoli: i bam-bini, gli insegnanti, gli esperti. I bambinicollaborano tra loro e con gli insegnanti intutte le fasi del lavoro, dall’identificazionedel problema all’invenzione di una soluzio-ne appropriata e alla sua realizzazione: di-scutono e si confrontano sulle alternativepossibili, ispezionano esempi e semilavorati,li modificano nei parametri e nella struttura;esplorano le potenzialità e i limiti della tec-nologia; si impegnano in un processo itera-tivo di costruzione socialmente condivisa incui le ipotesi che emergono vanno soggettesia al vaglio del gruppo, sia alla verifica spe-rimentale.Gli insegnanti mediano tra bambini e tec-nologia quel tanto che basta per renderefluido il processo, senza deprimere la creati-vità e la motivazione dei bambini. Alcunefunzioni di configurazione dell’ambiente diprogrammazione sono finalizzate a render-lo adattivo rispetto alle esigenze del gruppoe del particolare problema in esame: un in-segnante può, ad esempio, configurare facil-mente l’interfaccia, cambiando le icone e inomi associati agli oggetti manipolati dalprogramma (azioni, condizioni, comporta-menti). Ma è anche possibile (e operativa-mente facile) per un insegnante modificare
61
TD
27
num
ero
3-20
02La
fabb
rica d
ei ro
bot
figura 4Le due regole che defini-scono il comportamento“urto”. N.B.: l’interfac-cia visualizza solo le con-dizioni e azioni associateai dispositivi di input eouput selezionati.
diversi parametri di configurazione di azio-ni e condizioni predefinite: ad esempio, ifattori di scala associati alle durate tempora-li di azioni quali “Avanti” o le soglie di sen-sibilità sui vari sensori.Gli esperti nella programmazione di robotpossono estendere ulteriormente l’ambien-te per integrare la definizione di nuove ti-pologie di costruzioni.
ALCUNE ESPERIENZEREALIZZATE CON I BAMBININel progetto CAB la sperimentazione si èarticolata nell’arco due anni e ha coinvoltotre scuole dell’infanzia ed una scuola ele-mentare del Comune di Reggio Emilia e trescuole elementari in Svezia. Per una descri-zione approfondita rimandiamo ai rapportifinali dei partner educativi [CRE, 2001;Gustafsson e Lindh, 2001]. Qui ci limitia-mo a proporre la rilettura di tre esperienzerealizzate nelle scuole dell’infanzia, con l’o-biettivo di esplicitare le relazioni tra ricercain classe e progettazione e sviluppo dell’am-biente di programmazione usabile anchedai bambini di cinque anni.Anche e soprattutto per questa fascia di età,le esperienze riportate ci permettono di ar-gomentare che: 1) non ci sono ostacoli co-gnitivi alla programmazione di costruzionicibernetiche da parte dei bambini in presen-za di un contesto ben definito e di stru-menti specializzati; 2) per sostenere la com-plessità presente nei progetti dei bambinibisogna fornire un modello che incapsuli idettagli implementativi; 3) l’ambiente pro-posto riveste carattere di usabilità, in quan-to dotato di caratteristiche atte a renderloappetibile, ispezionabile secondo una datagranularità e “trattabile” (oggetto di discus-sione e di riflessione anche metacognitiva).
Specifico o generico?Un gruppo di bambini della scuola “La Vil-letta” ha usato il kit specializzato Robo-Sports, sviluppato dalla LEGO per permet-tere ai visitatori del LEGOLAND park dipartecipare a gare di robot. Il kit compren-de un campo di gara per due squadre checompetono nella realizzazione di un veico-lo che porti il maggior numero possibile dipalline in buca. Il campo è costituito da untavolo con due piste ognuna composta dauna linea nera e una buca retroilluminata.Le componenti meccaniche sono specializ-zate per costruire un set limitato di veicolicapaci di trasportare e spingere le palline inbuca. L’ambiente software fornisce primiti-ve quali il comportamento di “Segui una li-
nea”, interrompibile quando il sensore diluce “vede” la buca retroilluminata, e co-mandi di traslazione e rotazione per spinge-re le palline in buca. Il kit è completato davideo esplicativi per guidare gli utenti nellacostruzione e programmazione dei veicoli.Alla scuola “La Villetta” i genitori e gli in-segnanti hanno ricreato il campo da gioco ei bambini hanno costruito e programmato iveicoli per la gara.L’esperienza ha dimostrato che i bambiniriescono a gestire il compito e, cosa più im-portante, ad appropriarsi del linguaggioformale utilizzato per descrivere i loro ten-tativi e ragionare in gruppo sul problema.Infatti, la specializzazione delle componen-ti ha reso semplice la costruzione di un vei-colo adeguato al compito; l’ambiente diprogrammazione visivo, che fornisce un setlimitato di primitive, ha consentito ai bam-bini di comporre autonomamente il pro-gramma. Inoltre, i bambini hanno usato leicone dei comandi per annotare il campo digara e discutere sugli effetti delle istruzioniimpartite al robot quando queste non sorti-vano l’effetto desiderato [CRE, 2000].RoboSports ha dimostrato di essere unbuon esempio delle potenzialità del mat-toncino programmabile, in quanto proponeun contesto specifico e rende disponibili co-strutti linguistici ad hoc per la soluzione delproblema presentato. Il suo limite sta perònell’essere troppo specializzato: le compo-nenti hardware e software si possono usaresolo per questa gara, o per gare di questo ti-po, ma non possono essere trasferite ad unagamma più ampia di situazioni, finendo conl’ostacolare la creatività e lo sviluppo di pro-getti originati direttamente dai bambini.
Sostenere la complessitàRestiamo nella tipologia di gare di robot,questa volta con un progetto che è il risul-tato dell’immaginazione e del lavoro deibambini. Nella scuola “Neruda” l’interesseche i bambini di una sezione avevano colti-vato negli anni per i mostri ha fornito lospunto per un progetto che esplorasse for-me di vita artificiale. Questa “vita” si svilup-pa ed evolve secondo la frequenza e la qua-lità delle relazioni tra gli “attori”, i Mostri ei Difensori della città [Barchi et al, 2001].I mostri attaccano la città, gli abitanti co-struiscono mura e trappole per difendersi eorganizzano una squadra di difensori per te-ner lontani i mostri. I mostri e i difensori so-no stati costruiti cercando di definire com-portamenti che rendessero conto di una di-namica di scontro in cui non sono chiari
62
TD
27
num
ero
3-20
02La
fabb
rica d
ei ro
bot
dall’inizio né l’evoluzione né l’esito. Su ungrande tavolo i bambini hanno realizzato loscenario e aggiunto quattro veicoli (due di-fensori e due mostri). I mostri hanno duesensori di contatto programmati per aggira-re eventuali ostacoli e un sensore di lucepuntato sul tavolo che arresta il veicolo seincontra una zona di colore nero. Il neroidentifica sia le trappole che l’ingresso dellacittà. Inoltre, i mostri hanno una pila mon-tata sul dorso che li rende riconoscibili daidifensori. Questi ultimi hanno un sensore diluce che permette loro di muoversi nella di-rezione di attacco.Questa prima definizione dei comporta-menti ha fatto sì che i mostri e i difensori,dopo un primo urto, avanzassero a caso sulcampo di gara senza un chiaro obiettivo.Soltanto casualmente un mostro finiva intrappola o riusciva a entrare in città; i difen-sori vagavano senza una chiara strategia perbloccare i mostri, con cui a volte si scontra-vano. I bambini si sono resi conto dei limi-ti e hanno proposto alcune alternative, magli insegnanti hanno incontrato un ostacolonel realizzare i meccanismi di “attrazione”tra i difensori e i mostri, e tra i mostri e lacittà. È stato a questo punto fondamentaleil contributo degli esperti che hanno sugge-rito due possibili modifiche al progetto perrealizzare l’attrattività: introdurre delle pi-ste di altro colore che indicassero ai mostrila direzione per arrivare alle porte della cittàe modificare il programma dei difensori at-tivando un meccanismo di ricerca dei mo-stri, consistente nel girarsi intorno per rile-vare la direzione della luce. Queste propo-ste sono state discusse dagli insegnanti coni bambini, che hanno modificato lo scenarioe i robot ottenendo comportamenti infineconformi ai desiderata.Questo lavoro ha coperto un arco tempora-le piuttosto lungo e articolato in varie fasi:progettazione e realizzazione dello scena-rio; realizzazione, programmazione e speri-mentazione; modifica dei comportamenti.La partecipazione in qualità di esperti aquesta attività ha consentito agli autori diquesto articolo, impegnati nella progetta-zione dell’ambiente software descritto inprecedenza, di appurare i seguenti aspetti: èpossibile catturare la complessità di proget-ti di questo tipo nel modello proposto;comportamenti complessi quali quelli evi-denziati da questa esperienza difficilmentepossono essere sviluppati in autonomia daibambini, ma possono far parte di un reper-torio di componenti specializzati applicabilie ispezionabili direttamente dai bambini.
Questo progetto è risultato essere un buonesempio dello stile di interazione con og-getti cibernetici che Edith Ackermann defi-nisce come “Giocare allo psicologo”[Ackermann, 1991, 2002]. “Giocare allopsicologo” e “Giocare all’ingegnere” costi-tuiscono i due estremi di ruoli potenzialiche i bambini assumono quando interagi-scono con kit di costruzioni cibernetiche.Nel primo, prevale l’atteggiamento di os-servazione in cui i bambini tipicamente siinterrogano sulla natura dell’oggetto chehanno di fronte (sulle sue intenzioni, “in-telligenza”, ecc.), nel tentativo di capirnel’intima natura; nel secondo, prevale l’at-teggiamento costruttivo o di modifica deglioggetti e dei loro comportamenti. Ma ibambini, sostiene Ackermann, oscillanocontinuamente tra questi due estremi, esi-stendo infatti gradi diversi di breakdown edi situazioni in cui la componente dello psi-cologo e quella dell’ingegnere vengono ca-librate e combinate diversamente.
Diventare programmatori«Siamo diventati dei programmatori dirobot!È vero! Questa è una scuola di program-matori! Possiamo fare tante cose!Abbiamo scoperto tre segreti:il primo è che due pezzettini del metrofanno una mattonella;il secondo è che se l’uccellino tocca il senso-re di piegamento il registratore fa cip cip;il terzo è che i robot con la busta e la cas-setta delle lettere si possono parlare.»
[CRE, 2001]
Nella scuola “La Villetta” alcuni bambini dicinque anni dell’anno scolastico 1999/2000 avevano cercato di ridare vita ad unramo di un albero del giardino che si eraspezzato durante una nevicata. Il ramo erastato portato dentro la scuola e “fornito dinuova vita” con l’aggiunta di sensori e at-tuatori che gli permettevano di reagire allaluce, al contatto con le foglie, ecc.Nel successivo anno scolastico altri bambi-ni, che nell’anno precedente avevano assisti-to all’inserimento del ramo nella vita dellascuola, hanno deciso di estendere il proget-to aggiungendo un uccellino che nel duroinverno chiede aiuto ad un amico robot perprocurarsi del cibo. Il robot porta le bricio-le di pane sotto l’albero e chiama il suo ami-co uccellino che scende a raccoglierle.Questi bambini, che sono cresciuti in unarealtà in cui le costruzioni cibernetiche era-no già presenti e l’idea di programmazione
63
TD
27
num
ero
3-20
02La
fabb
rica d
ei ro
bot
era stata sperimentata con RoboSports,hanno trovato naturale realizzare e pro-grammare le loro idee con un prototipo diambiente messo loro a disposizione.Le frasi riportate all’inizio della sezione te-stimoniano il loro livello di consapevolezzaraggiunto alla fine dell’esperienza. Duranteil progetto i bambini hanno dovuto risolve-re una serie di problemi. Il primo era quel-lo di determinare il valore da dare al co-mando “Avanti” per far sì che il robot simuovesse di sei mattonelle sul pavimento.“Due pezzettini del metro fanno una mat-tonella” esemplifica il percorso che i bambi-ni hanno seguito per correlare il parametrodel comando “Avanti”, reso disponibile dalnostro ambiente per i Veicoli, con l’effetti-vo spazio percorso dal robot. I bambinihanno costruito uno strumento di misura,che hanno chiamato “metro”, per associareil valore del parametro ad un elemento delcontesto, le mattonelle del pavimento. Poi-ché di quanto si muove un veicolo è funzio-ne delle scelte fatte nella sua costruzione, ilsoftware permette di modificare un coeffi-ciente di scala per rendere significativi i va-lori del parametro. Questa operazione di ta-ratura è stata eseguita dagli insegnanti; ibambini hanno eseguito le misure e, verifi-cato che bisognava muoversi in avanti di 12,hanno scomposto questo risultato inseren-do due comandi “Avanti” (10 + 2), vistoche l’interfaccia forniva uno slider con valo-ri da 0 a 10 [figura 5].Quest’esperienza ci ricorda che quando ibambini sono motivati riescono a mantene-re a lungo la concentrazione e dimostranocompetenze che in genere non ci si aspettaa quest’età. Poiché abbiamo scelto di rap-
presentare il parametro di “Avanti” solocon un numero, senza specificarne l’unità dimisura, abbiamo favorito l’interpretazionedei bambini secondo cui il parametro indicauna distanza. In realtà, il parametro con-trolla il tempo di accensione dei motori, maportare in primo piano questo dettaglio co-stringerebbe a tener conto della corrispon-denza tra tempi e distanze. Ciò è stato ri-solto dall’intervento degli insegnanti chehanno opportunamente tarato il fattore discala per far corrispondere “Avanti 2” aduna mattonella, permettendo così ai bambi-ni di controllare la situazione.I bambini hanno realizzato il loro progettoin modo da poter raccontare la storia men-tre veniva rappresentata dall’uccellino e dalrobot. I punti di sincronizzazione sono es-senziali al buon risultato della messa in sce-na: il robot deve iniziare a muoversi quandol’uccellino lo chiama, e l’uccellino devescendere quando il robot arriva sotto l’albe-ro. Una prima soluzione è stata quella diusare un sensore di suono per ascoltare lavoce dell’uccellino (“se l’uccellino tocca ilsensore di piegamento il registratore fa cipcip”). Questa soluzione, però, non ha rettoalla verifica sperimentale. Il sensore di suo-no non distingue tra cinguettio e altri ru-mori attivandosi quindi in presenza di qua-lunque tipo di suono. L’organizzazione perscatole dell’interfaccia iconica ha aiutato ibambini a esplorare possibili alternative escoprire autonomamente che “i robot conla busta e la cassetta delle lettere si possonoparlare”. Lo scambio di messaggi ha fornitoun robusto meccanismo di sincronizzazio-ne permettendo ai bambini di riprogram-mare il robot portapane (figura 5) e com-pletare il loro progetto adottando un mec-canismo analogo per dire all’uccellino discendere a mangiare quando il robot rag-giunge l’albero.L’evoluzione del progetto e il modo in cui ibambini sono riusciti a gestire i problemisorti durante le fasi di programmazione sot-tolinea l’appropriabiltà e trattabilità dell’in-terfaccia proposta.
CONCLUSIONIIl progetto CAB ha risposto in modo affer-mativo alla domanda: è possibile impararecostruendo robot nella scuola dell’infanzia?Non sembrano infatti esserci ostacoli cogni-tivi alla programmazione di costruzioni ci-bernetiche da parte dei bambini in presenzadi un contesto ben definito e di strumentispecializzati. L’esplorazione della sensoria-lità, reattività, controllo e autonomia e lo
64
TD
27
num
ero
3-20
02La
fabb
rica d
ei ro
bot
figura 5La definizione del com-portamento che dice alrobot di muoversi inavanti quando riceve unmessaggio. Nell’angoloin alto a sinistra sonomostrati tre sensori:quello dei messaggi (sele-zionato), uno di suono euno di luce. Per farmuovere il robot “Avan-ti 12” i bambini hannousato due comandi (10 +2), poiché l’interfacciaprevede uno slider (nonmostrato in figura) chelimita la scelta del valo-re del parametro all’in-tervallo [0 ... 10].
sviluppo delle teorie associate sono favoritinei bambini dal confronto con la costruzio-ne di oggetti cibernetici che le reificano.L’ambiente di programmazione propostopermette di adattare le primitive messe a di-sposizione alle tipologie di costruzioni usa-te dai bambini nei loro progetti. Le scelteprogettuali per l’interfaccia si sono rivelateaccessibili ed usabili anche dai bambini dicinque anni, consentendo loro di program-mare i comportamenti delle costruzioni esoprattutto di risolvere i problemi sorti du-rante l’evoluzione dei progetti.I risultati raggiunti vanno comunque riferi-ti ad un contesto di ricerca dove la media-zione degli adulti poteva avvalersi di risorse,competenze e tempi di lavoro difficilmenterintracciabili nei normali contesti educativi.Nell’ambito del progetto abbiamo svilup-pato alcune idee su possibili evoluzioni delmateriale costruttivo che potrebbero per-mettere un uso creativo e più autonomo delmateriale per i bambini e forse aprire la stra-da a sperimentazioni per una fascia di età diquattro anni [Ackermann, 2002]. Una pri-ma indicazione riguarda un’ulteriore ridu-zione della complessità meccanica delle co-struzioni: il kit, ad esempio, dovrebbe pre-vedere componenti pre-assemblate che per-mettano trasformazioni semplici di movi-menti (da rotatorio orizzontale a rotatorioverticale, da veloce ma debole a lento mapotente, ecc.) senza scendere al livello deisingoli ingranaggi; oppure introdurre nuovisensori e attuatori per aprire la strada ad at-tività costruttive che prevedano una plura-lità di materiali, non solo LEGO, in cuiemerga da subito il ruolo della programma-zione, come nello scenario del “muro deisuoni”.Un’altra indicazione riguarda il design deisingoli componenti per migliorarne la leggi-bilità. Le componenti attive del kit, i senso-ri e gli attuatori, dovrebbero infatti rivelarela loro natura sia proponendo una plasticatrasparente che permetta di vedere le partiinterne, sia aggiungendo una risposta visiva:per esempio, l’aggiunta di una barra di LEDsui sensori darebbe un’indicazione dell’in-tensità dell’input.Infine, ci siamo chiesti: perché i bambininon dovrebbero poter costruire i program-mi con componenti tangibili così come fan-no con i LEGO? Questo approccio, che vasotto il nome di “programmazione tangibi-le” [Suzuki e Kato, 1995], è un settore diricerca fiorente in cui sono presenti moltiprogetti indirizzati ai bambini [McNerney,1999; Wyeth & Wyeth, 2001; Montemayor
et al, 2002]. Una versione tangibile del-l’ambiente di programmazione descrittoprecedentemente potrebbe realizzare la vi-sione di mischiare Atomi e Bit in manieraconcreta e facile da usare [figura 6]. Com-portamenti, condizioni e azioni potrebberoessere dei tasselli fisici che contengono l’e-lettronica necessaria a riconoscere automa-ticamente la topologia del puzzle [Gorbetet al, 1998] e a generare il programma cor-rispondente. I bambini potrebbero lavorarein modo cooperativo manipolando le com-ponenti della programmazione così comefanno con le parti fisiche della costruzione.Ciò non sostituirebbe il computer, ma lo in-tegrerebbe portando il suo ruolo sullo sfon-do nelle fasi costruttive e in primo piano inquelle di riflessione e documentazione.
RINGRAZIAMENTIIl lavoro descritto in questo articolo non sa-rebbe stato possibile senza l’impegno, l’en-tusiasmo e la creatività dei bambini e degliinsegnanti delle scuole svedesi e italiane chehanno partecipato al progetto CAB. In par-ticolare siamo debitori ai bambini dellascuola “La Villetta” del titolo di questo ar-ticolo. I nostri partner sono stati portatori diistanze e punti di riferimento diversi, cia-
65
TD
27
num
ero
3-20
02La
fabb
rica d
ei ro
bot
figura 6Una versione tangibiledella definizione delcomportamento “urto”.Le etichette sulla stazio-ne a cui si connettono itasselli ne indicano lefunzionalità: a) per de-finire una regola, con-nettere condizioni eazioni su questo lato; b)la regola corrente può es-sere usata per definireun comportamento inse-rito in questo slot; c) laporta di comunicazionecon il PC; d) uno slot ag-giuntivo per ridefinire ilsignificato di un tassellodi condizione o azione.
scuno dei quali ha concorso alla realizza-zione di un approccio multidisciplinare emulticulturale che si è profondamente av-vantaggiato della varietà e delle differenzepreesistenti. Vogliamo ricordare in parti-colare Paola Barchi, Gino Ferri, GiovanniPiazza e Maura Rovacchi delle scuole del-l’infanzia del Comune di Reggio Emiliaper aver mantenuto sempre presente nelnostro lavoro il punto di vista dei bambini;Gaute Munch e Martin Rausch della LE-
GO A/S per il loro contributo all’ambien-te di programmazione.Siamo grati a Edith Ackermann per aver ac-cettato di scrivere un articolo insieme fornen-do un punto di vista complementare sul si-gnificato della programmazione per i bambi-ni e aiutandoci a riflettere sul nostro lavoro.Vincenza Benigno e Donatella Persico han-no rivisto versioni preliminari di questo ar-ticolo fornendo preziose indicazioni per mi-gliorane la leggibilità.
66
TD
27
num
ero
3-20
02La
fabb
rica d
ei ro
bot
Chi vuole approfondire le tematiche della robotica educativaha a disposizione diverse fonti di informazione. Nel seguito èriportata una selezione di riferimenti bibliografici e siti web1
che privilegia materiali relativi al LEGO MindStorms. Infine sipropone un elenco di altri prodotti per la robotica educativa.
Una bibliografia su LEGO MindStormsUna raccolta di progetti per ragazzi della scuola media:
Erwin B. (2001), Creative Projects with LEGO Mindstorms,Addison-Wesley Pub Co, Boston, MA.
Un libro di testo per un corso introduttivo a livello universitario:Martin F. G. (2001), Robotic Explorations: An Introduction toEngineering Through Design, Prentice Hall, Upper Saddle Ri-ver, NJ.
Libri che trattano la robotica a livello hobbistico e presuppon-gono competenze ingegneristiche e di programmazione:
Bagnall B. (2002), Core LEGO MINDSTORMS Programming:Unleash the Power of the Java Platform, Prentice Hall, UpperSaddle River, NJ.Baum D. (2002), Dave Baum’s Definitive Guide to LEGOMindstorms, 2nd edition, Apress, Berkeley, CA.Baum D., Gasperi M., Hempel R., Villa L. (2000), ExtremeMindstorms: an Advanced Guide to LEGO Mindstorms,Apress, Berkeley, CA.Ferrari M., Ferrari F. (2001), Building Robots With LEGOMindstorms: The Ultimate Tool for Mindstorms Maniacs, Syn-gress Media Inc., Rockland, MA.Laverde D. (ed.) (2002), Programming Lego Mindstorms withJava, Syngress Media Inc., Rockland, MA.
Materiali didatticiIl Center for Engineering Educational Outreach della Tufts Uni-versity mette a disposizione:
The LEGO Curriculum Site:http://www.ceeo.tufts.edu/curriculum/The Science and Engineering NASA Site of Remote Sensing:http://www.ceeo.tufts.edu/sensors/
Il MediaLab del MIT offre un’enciclopedia di costruzioni roboti-che (constructopedia):
http://constructopedia.media.mit.edu/Il sito della Playful Invention and Exploration (PIE) Network),una rete di musei americani che in collaborazione con il MITMedia Lab sviluppa progetti e attività per integrare scienza,tecnologie e arte:
http://www.smm.org/pie/
Materiali informativi e softwareI LEGO User Groups dedicati alla robotica costituiscono la piùvasta e aggiornata fonte di informazioni su questo tema:
http://news.lugnet.com/robotics/
Ulteriori linguaggi e ambienti per programmare il LEGO Mind-Storms:
Not Quite C (NQC) è un linguaggio Open Source in sintassiC. http://www.baumfamily.org/nqc/Bricx Command Center è un ambiente di sviluppo OpenSource per utilizzare il linguaggio NQC in ambiente Win-dows.http://hometown.aol.com/johnbinder/bricxcc.htmLeJos è un linguaggio Open Source in sintassi JAVA.http://lejos.sourceforge.net/MindRover è un videogioco dove uno o più giocatori costrui-scono e programmano robot virtuali che competono in mis-sioni varie. Ne esiste una versione che permette sia di simu-lare il comportamento di un robot fisico all’interno del video-gioco, che di scaricare il programma creato sul robot reale.http://www.mindrover.com/
ProdottiIl LEGO MindStorms è il prodotto di maggior successo in que-sto ambito. Esistono però altre offerte significative che copronoun ampio spettro di esigenze a cui corrispondono livelli di usa-bilità diversi. Per esempio TechnoK’NEX è un mattoncino pro-grammabile compatibile con vari kit meccanici, tra cui LEGOTechnic; gli altri kit di costruzione richiedono competenze inge-gneristiche poiché permettono di integrare componenti elettro-nici esterni. In alcuni casi il prodotto di base è lo stesso ma laveste commerciale ne propone specializzazioni diverse: Il tuoRobot De Agostini è una versione personalizzata del BasicStamps di Parallax. Infine Khepera e AIBO sono due robot mo-bili complessi e potenti che privilegiano gli aspetti di program-mazione fornendo una struttura meccanica e apparati di inputintegrati.Basi per robot mobili
Khepera, http://www.k-team.com/robots/khepera/Il tuo Robot (De Agostini), http://robot.deagostini.it/
Kit di costruzioneBasic Stamps versione education (Parallax),http://www.stampsinclass.com/Handy Board e Handy Cricket,http://www.handyboard.comTechnoK’NEX Computer Control System, http://www.knexe-ducation.com/leonardo.html
Robot mobili programmabiliAIBO della Sony si può programmare grazie al kit softwaredisponibile in http://www.aibo.com/openr/
1 Tutti i riferimenti sono aggiornati a ottobre 2002.
PER SAPERNEDI PIÙ
67
TD
27
num
ero
3-20
02La
fabb
rica d
ei ro
bot
Ackermann E. (1991), The“Agency” Model of Tran-sactions: Toward an Under-standing of Children’sTheory of Control, in HarelI. & Papert S. (eds), Con-structionism, Ablex Publi-sher, Norwood, NJ.
Ackermann E. (2001),Constructivisme et construc-tionnisme: quelle differen-ce?, in Actes du colloque“Constructivismes: usageset perspectives en educa-tion”, 4-8 Settembre 2000,Genève, Suisse, vol. 1, pp.85-97.
Ackermann E. (2002), Am-bienti di gioco programma-bili: cos’è possibile per unbambino di quattro anni?,TD – Tecnologie Didattiche,n. 27, pp. 48-55.
Ananny M. (2001), TellingTales: Supporting written li-teracy with computationaltoys, Unpublished MasterThesis, The MIT Media La-boratory, Cambridge, MA.
Askildsen T., Barchi P., Ca-gliari P., Chioccariello A.,Giacopini E., Gustafsson B.,Lindh J., Manca S., RauschM., Sarti L. (2001a), Con-struction kits made of Atomsand Bits. Research findings& perspectives, CAB Del.25, http://cab.itd.ge.cnr.it/public/papers.htm
Askildsen T., ChioccarielloA., Manca S., Munch G.,Rausch M., Sarti L. (2001b),A Cybernetic ConstructionKit for Young Children, CABDel. 22, http://cab.itd.ge.cnr.it/public/deliverables/del22.pdf
Barchi P., Cagliari P., Gia-copini E. (2001), Encoun-ters between children androbotics, in Askildsen T.,Barchi P., Cagliari P., Chioc-cariello A., Giacopini E.,Gustafsson B., Lindh J.,Manca S., Rausch M., SartiL., Construction kits madeof Atoms and Bits. Researchfindings & perspectives,CAB Del. 25,http://cab.itd.ge.cnr.it/public/deliverables/booklet/booklet-CRE.pdf
Bers M., Urrea C. (2000),Technological Prayers: Pa-rents and Children Workingwith Robotics and Values, inDruin A. & Hendler J. (eds),Robots for Kids: ExploringNew Technologies for Lear-ning Experiences, MorganKaufman Academic Press,San Francisco.
Brooks R. A. (1991), Intelli-gence without representa-tion, Artificial Intelligence,vol. 47, pp. 139–159.
CRE (2000), Pedagogicalresults 2, CAB Del. 17.
CRE (2001), Final pedago-gical report, CAB Del. 23,http://cab.itd.ge.cnr.it/pu-blic/deliverables/del23.pdf
Dewey J. (1910), How wethink, Health, Boston (tr. it.,Come pensiamo, La NuovaItalia, Firenze, 1973).
Druin A. (1999), Coopera-tive Inquiry: DevelopingNew Technologies for Chil-dren with Children, in Pro-ceedings of CHI ‘99, ACMPress, New York, pp. 223-230.
Druin A. (2002), The Roleof Children in the Design ofNew Technology, Behaviourand Information Techno-logy, 21(1), pp. 1-25.
Giordano E. (2002), Per-corsi di apprendimento, TD– Tecnologie Didattiche, n.27, pp. 21-28.
Gorbet M., Orth M., Ishii H.(1998), Triangles: TangibleInterface for Manipulationand Exploration of DigitalInformation Topography, inProceedings on Human fac-tors in Computing SystemsConference (CHI ‘98), April18-23, 1998, Los Angeles,USA, pp. 49-56.
Harel I., Papert S. (eds) (1991),Constructionism, Ablex Publi-shing, Norwood, NJ.
Malaguzzi L. (1995), Lastoria, le idee, la cultura, inEdwards C., Gandini L.,Forman G. (eds), I cento lin-guaggi dei bambini. L’ap-proccio di Reggio Emilia al-l’educazione dell’infanzia,Edizioni Junior, Bergamo.
Martin F., Mikhak B., Re-snick M., Silverman B.,Berg R. (2000), To Mind-storms and Beyond: Evolu-tion of a Construction Kit forMagical Machines, in DruinA. & Hendler J. (eds), Ro-bots for Kids: ExploringNew Technologies for Lear-ning Experiences, MorganKaufman Academic Press,San Francisco.
McNerney T. S. (1999), Tan-gible Programming Bricks:An Approach to MakingProgramming Accessible toEveryone, Master’s thesis,MIT, Cambridge, MA.
Montemayor J., Druin A.,Farber A., Simms S., Chu-raman W., D’Amour A.(2002), Physical program-ming: Designing tools forchildren to create physicalinteractive environments, inProceedings of the SIGCHIconference on Human fac-tors in computing systems:Changing our world, chan-ging ourselves (CHI 2002),ACM Press, pp. 299-306.
Nardi B. (1993), A SmallMatter of Programming:Perspectives on End UserComputing, The MIT Press,Cambridge, MA.
Papert S. (1980), Mind-storms: Children, Compu-ters, and Powerful Ideas,Basic Books, New York (tr.it., Mindstorms. Bambini,computers e creatività, Em-me, Milano, 1984).
Papert S. (1993), The Chil-dren’s Machine: RethinkingSchool in the Age of theComputer, Basic Books,
New York (tr. it., I bambini eil computer, Rizzoli, Mila-no, 1994).
Piaget J. (1975), L’Equili-bration des structures co-gnitives, Puf, Paris (tr. it.,L’equilibrazione delle strut-ture cognitive. Problemacentrale dello sviluppo, Bo-ringhieri, Torino, 1981).
Pontecorvo C., Ajello A. M.,Zucchermaglio C. (eds)(1995), I contesti sociali del-l’apprendimento, LED - Edi-zioni Universitarie di LettereEconomia Diritto, Milano.
Resnick M. (1991), MultiLo-go: A Study of Children andConcurrent Programming,Interactive Learning Envi-ronments, vol. 1, n. 3, pp.153-170.
Resnick M. (1996), Distri-buted Constructionism, inProceedings of the Interna-tional Conference on theLearning Sciences, July1996, Evanston, USA.
Resnick M., Berg R., Eisen-berg M. (2000), BeyondBlack Boxes: Bringing Tran-sparency and AestheticsBack to Scientific Investiga-tion, Journal of the LearningSciences, vol. 9, n. 1, pp. 7-30 (tr. it. in questo numero).
Resnick M., Martin F., Sar-gent R., Silverman B.(1996), ProgrammableBricks: Toys to think with,IBM Systems Journal, vol.35, n. 3/4.
Resnick M., Ocko S. (1991),LEGO/Logo: Learning Th-rough and About Design, inHarel I. & Papert S. (eds),Constructionism, Ablex Pu-blisher, Norwood, NJ.
Rinaldi C. (1995), La co-struzione del progetto edu-cativo, in Edwards C., Gan-dini L., Forman G. (eds), Icento linguaggi dei bambi-ni. L’approccio di ReggioEmilia all’educazione del-l’infanzia, Edizioni Junior,Bergamo.
Salomon G. (ed) (1993), Di-stributed cognition: Psycholo-gical and educational consi-
Scaife M., Rogers Y.(1999), Kids As Informants:Telling Us What We Didn’tKnow or Confirming WhatWe Knew Already, in DruinA. (ed), The Design of Chil-dren’s Technology, MorganKaufman Academic Press,San Francisco.
Schuler D., Namioka A.(eds) (1993), Participatorydesign: Principles and prac-tices, Lawrence ErlbaumAssociates, Hillsdale, NJ.
Suzuki H., Kato H. (1995),Interaction-Level Supportfor Collaborative Learning:AlgoBlock – An Open Pro-gramming Language, inProceedings of CSCL’95,pp. 349-355.
Turkle S. (1984), The Se-cond Self: Computers andthe Human Spirit, Simonand Schuster, New York.
Turkle S. (1995), Life on theScreen: Identity in the Ageof the Internet, Simon andSchuster, New York (tr. it. Lavita sullo schermo. Nuoveidentità e relazioni socialinell’epoca di Internet, Apo-geo, Milano, 1997).
Turkle S., Papert S. (1992),Epistemological pluralismand the revaluation of theconcrete, Journal of Mathe-matical Behaviour, vol. 11,n. 1, pp. 3-33.
Vygotskij L. S. (1978), Mindin Society, Harvard Univer-sity Press, Cambridge, MA(tr. it., Il processo cognitivo,Boringhieri, Torino, 1980).
Wood D., Bruner J., Ross G.(1976), The role of tutoringin problem solving, Journalof child Psychology and Psy-chiatry, 17, pp. 89-100.
Wyeth P., Wyeth G.(2001), Electronic Blocks:Tangible Programming Ele-ments for Preschoolers, inProceedings of the EighthIFIP TC13 Conference onHuman-Computer Interac-tion (Interact 2001), Tokyo,Japan, July 9-13, 2001.