1. NOZIONI ELEMENTARI DI MECCANICA DEL CONTINUO Trasformazioni delle coordinate di vettori e tensori Un vettore è un’entità matematica indipendente dai sistemi di riferimento particolari per mezzo dei quali può essere rappresentato. Ad esempio, il vettore v di fig. 1 è rappresentato nel riferimento cartesiano (x, y) dalle coordinate (v x , v y ) e nel riferimento (x’, y’) dalle coordinate (v x’ , v y’ ) (v x , v y ). Figura 1 La legge di trasformazione delle coordinate di un vettore nel passaggio da un riferimento all’altro, indicata mediante l’operatore lineare T, può essere ricavata esprimendo i versori del riferimento di partenza mediante le coordinate relative al riferimento di arrivo: T = [i; j; k] (x’, y’, z’) (1) Ad esempio, nel caso bidimensionale, si ha (vedi fig. 1) i = (1, 0) (x, y) = (cosα, -senα) (x’, y’) j = (0, 1) (x, y) = (senα, cosα) (x’, y’) (2) T = [i; j] (x’, y’) = (3) Quindi una coppia di numeri (v x , v y ) associati ad un sistema di riferimento cartesiano (x, y) si può definire vettore solo se al variare del riferimento essa cambia con la legge: = T = , (4) che in simboli compatti si scrive: v’ = T v . (5) cosα senα -senα cosα v x’ v y’ v x v y cosα senα -senα cosα v x v y
Transcript
1. NOZIONI ELEMENTARI DI MECCANICA DEL CONTINUO
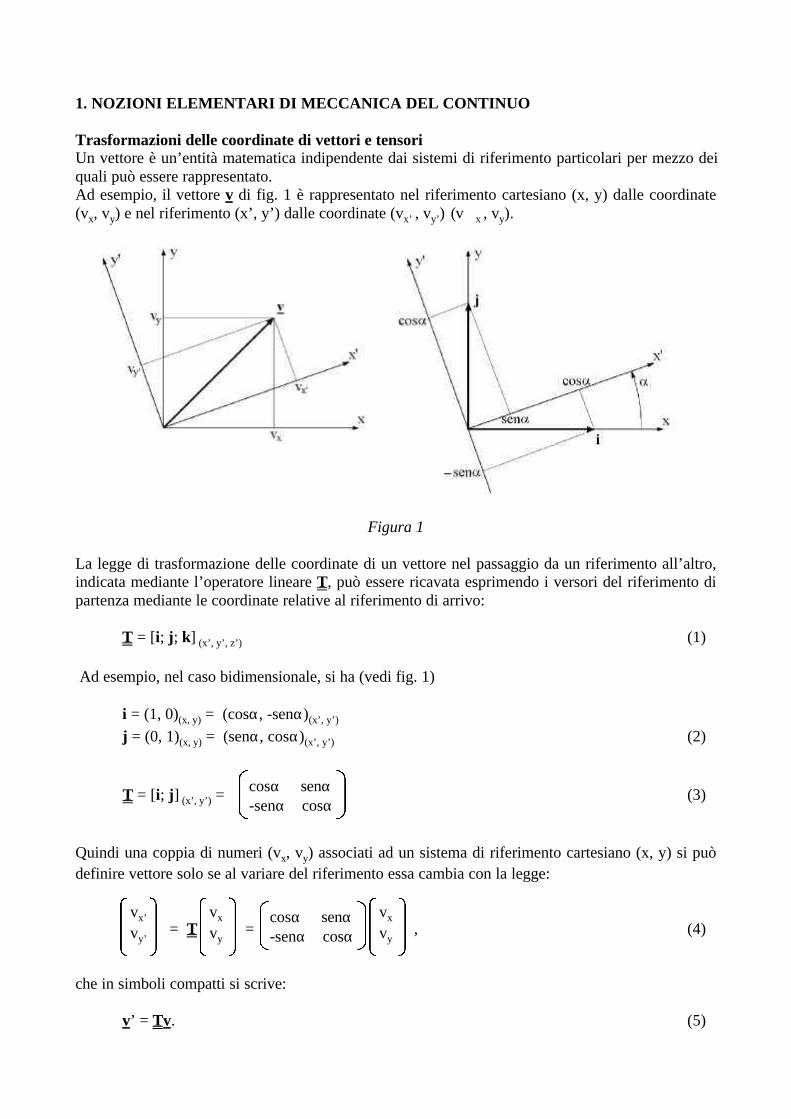
Trasformazioni delle coordinate di vettori e tensoriUn vettore è un’entità matematica indipendente dai sistemi di riferimento particolari per mezzo deiquali può essere rappresentato.Ad esempio, il vettore v di fig. 1 è rappresentato nel riferimento cartesiano (x, y) dalle coordinate(vx, vy) e nel riferimento (x’, y’) dalle coordinate (vx’ , vy’) � (v x , vy).
Figura 1
La legge di trasformazione delle coordinate di un vettore nel passaggio da un riferimento all’altro,indicata mediante l’operatore lineare T, può essere ricavata esprimendo i versori del riferimento dipartenza mediante le coordinate relative al riferimento di arrivo:
T = [i; j; k] (x’, y’, z’) (1)
Ad esempio, nel caso bidimensionale, si ha (vedi fig. 1)
i = (1, 0)(x, y) = (cosα, -senα)(x’, y’)
j = (0, 1)(x, y) = (senα, cosα)(x’, y’) (2)
T = [i; j] (x’, y’) = (3)
Quindi una coppia di numeri (vx, vy) associati ad un sistema di riferimento cartesiano (x, y) si puòdefinire vettore solo se al variare del riferimento essa cambia con la legge:
= T = , (4)
che in simboli compatti si scrive:
v’ = Tv. (5)
cosα senα-senα cosα
vx’
vy’
vx
vy
cosα senα-senα cosα
vx
vy
L’operatore T è una matrice quadrata ortonormale, cioè il prodotto scalare delle sue righe (o dellecolonne) è nullo, e inoltre la norma delle righe e delle colonne è unitaria, com’è facile verificare adesempio nella formula (3). Inoltre la matrice inversa di T coincide con la sua trasposta:
T-1 = TT. (6)
Consideriamo ora l’operatore lineare A che trasforma un vettore ai nel vettore bi:
A : bi = Aai
⇔ = (7)
Questo operatore A esprime una relazione tra vettori, e quindi dev’essere indipendente dallecoordinate particolari Aij nello stesso senso in cui un vettore v è indipendente dalle sue coordinate vi
(vedi fig. 2).
Figura 2
Se si cambia il sistema di riferimento, i vettori ai e bi diventano, utilizzando la relazione (5):
a’i = Tai ; b’i = Tbi , (8)
e la relazione (7) tra di essi diventa:
b’i = A’a’i . (9)
Con semplici passaggi si ricava:
b’i = A’a’i ⇒ Tbi = A’Tai ⇒ bi = (TTA’T)ai ∀ai ,
⇒ TTA’T = A ⇔ A’ = TATT . (10)
b1i
b2i
A11 A12
A21 A22
a1i
a2i
Un’entità matematica A che ha le proprietà appena descritte si chiama tensore, e, analogamente alvettore, può essere rappresentato in qualsiasi sistema di riferimento senza perdere la sua identitàpurchè cambi le coordinate secondo la legge suddetta.
TensioniDato un corpo continuo sottoposto ad un sistema di vincoli e forze esterne, esso reagisce a talisollecitazioni, e cerca di restare integro mediante le forze di coesione presenti su scala atomica.Si definisce tensione la forza per unità di superficie che i legami atomici oppongono per resistereall’azione delle forze esterne. Tale forza unitaria cambia, in ogni punto del continuo, al variare dellaposizione che la superficie assume nello spazio (fig. 3).
Figura 3
La superficie elementare dA cui si riferisce la tensione viene indicata con la sua normale n, e quindila tensione è definita, in ogni punto, in funzione di n, e si indica con tn:
tn = (11)
Tutte le tensioni definite in un punto del continuo (che sono infinite, poiché per ogni punto sipassano infinite superfici elementari) possono essere espresse per mezzo delle tensioni particolariappartenenti a due (nel caso bidimensionale) o tre (nel caso tridimensionale) superfici mutuamenteortogonali. Se scegliamo come piani particolari quelli di normale n, m, l, avremo le tre tensioni
tn, tm, tl . (12)
Si possono esprimere le coordinate dei tre vettori appena definiti nel riferimento cartesiano definitodalle stesse tre normali (n, m, l), ottenendo così le coordinate di ciascuna tensione (fig. 4):
Le coordinate appena definite delle tre tensioni sono le componenti di un tensore relative alriferimento (n, m, l): il tensore degli sforzi σσ.
σσ = [tn; tm; tl ] (n, m, l) = = . (14)
Le componenti diagonali del tensore (14) si chiamano tensioni normali (σ); le altre si chiamanotensioni tangenziali (τ).
Le tensioni tangenziali hanno la proprietà di simmetria, e cioè risulta sempre:
τmn = τnm ; τml = τlm ; τln = τnl . (15)
Questa proprietà deriva dall’equilibrio alla rotazione del cubetto elementare di fig. 4.
Trasformazione del tensore σσSupponiamo di conoscere le tensioni relative ad un sistema di riferimento bidimensionale (x, y).Vogliamo sapere come variano (cioè come variano le componenti del tensore σσ) al variare delriferimento. Come tutti i tensori, esso obbedisce, in generale, alla legge:
σσ’ = TσσTT . (16)
Se i riferimenti sono quelli di fig. 1 (con (x’, y’) = (n, m)), si avrà:
tnn tmn tln
tnm tmm tlm
tnl tml tll
σn τmn τln
τnm σm τlm
τnl τml σl
σσ’ = = = TσσTT . (17)
Sviluppando i termini dell’equazione precedente, si ha:
Tra gli infiniti riferimenti (n, m) che passano per un dato punto, ve n’è uno privilegiato: quello per ilquale la tensione tangenziale τnm è nulla. Per trovare questo riferimento basta annullare l’ultimadelle equazioni precedenti:
τnm = [(σy - σx)/2]sen(2α) + τxy cos(2α) = 0 ⇒
(20)
Sostituendo il valore di α così ricavato nelle altre due formule, si ottengono due particolari valoridelle tensioni normali chiamati tensioni principali, indicate solitamente con σ1 e σ2, che hanno laproprietà di essere la massima e la minima tensione normale esistenti in quel punto. Il riferimento incui ciò si verfica si chiama riferimento principale.Le tensioni principali sono importanti perché ci danno informazioni che non dipendono dalriferimento.
Cerchio di MohrLe espressioni (19) delle tensioni σn e τnm riportate di seguito:
Confrontando le (21) con le (23) si ricavano le seguenti condizioni:
ρcos(β) = (σx - σy)/2
ρsen(β) = τxy (24)
sommando i quadrati delle precedenti equazioni, si ricava l’espressione di ρ e, dividendo la secondaper la prima, si ricava β:
(25)
La forma finale delle tensioni normali e tangenziali al variare di α (cioè del riferimento) è quindi:
(26)
Nella precedente espressione è facile riconoscere le equazioni parametriche di una circonferenzagiacente nel piano (σn, τnm) di raggio ρ e centro nel punto ((σx + σy)/2, 0). Questa circonferenzaprende il nome di cerchio di Mohr delle tensioni (figura 5).
Figura 5
ρσ σ
τ βτ
σ σ=
−+ =
−−
−( ) ; ( )x yxy
xy
y x
tg2
22 2 1
σσ σ σ σ
τ β α
τσ σ
τ β α
nx y x y
xy
nmx y
xy sen
−+
=−
+ −
=−
+ −
2 22
22
2 2
2 2
( ) cos( )
( ) ( )
Confrontando le espressioni (20) e (25) si può vedere che il riferimento principale corrisponde adun angolo α∗ tale che 2α∗ = β; sostituendo tale valore nell’espressione di σn data dalla (26), si
ricava la prima tensione principale σ1:
(27)
La seconda tensione principale è relativa alla giacitura ortogonale a quella di σ1, definita da
α∗∗ = α∗ + π/2 = β/2 + π/2; sostituendo tale valore nell’espressione di σn, si ricava la seconda
tensione principale σ2:
(28)
Le espressioni analitiche delle tensioni e del riferimento principale trovano riscontronell’interpretazione grafica del cerchio di Mohr.Ad esempio, dalla figura 5 si possono ricavare graficamente la massima e la minima tensionenormale possibili che valgono rispettivamente: σ1 = (σx + σy)/2 + ρ; σ2 = (σx + σy)/2 - ρ, cheovviamente coincidono con quelle ricavate analiticamente nelle (26 - 27).
Criteri di resistenza per materiali omogeneiLa conoscenza dello stato tensionale permette di decidere se una data struttura sarà capace diresistere alle sollecitazioni, e con quale margine di sicurezza.Molti materiali di interesse meccanico (basti pensare agli acciai) possono essere consideratiomogenei, cioè aventi proprietà meccaniche indipendenti dalla direzione.Ovviamente, la capacità di resistenza di un materiale omogeneo in un certo punto, in cui lo statotensionale è definito dal tensore σσ, non può dipendere dal sistema di riferimento particolare rispettoal quale le tensioni sono state calcolate. Pertanto, la valutazione della sollecitazione interna ai finidella resistenza deve tenere conto soltanto delle tensioni principali.Il più semplice criterio di resistenza è quello che attribuisce la rottura alla massima tensionenormale:
(29)
Ciò vuol dire che qualunque stato tensionale con la stessa σmax è equivalente ai fini della resistenza.Occorre ora un termine di confronto per quantificare la massima tensione sopportabile dalmateriale; in questo caso, esso può essere facilmente ricavato da una prova di trazione.E’ noto che sottoponendo a trazione semplice un provino prismatico o cilindrico, l’unica tensionepresente sarà la σx, se x è l’asse longitudinale del provino. Allora la massima tensione che il
provino sopporta sarà proprio σmax = σx. Al momento della rottura, misureremo una tensione σx =
σr, per cui il criterio di resistenza per quel materiale sarà σmax = σr :
(30)
σ σσ σ σ σ
τα β1 2
2 2
2 2= =
++
−+
=nx y x y
xy( )( )
σ σσ σ σ σ
τα β π2 2
2 2
2 2= =
+−
−+
= +nx y x y
xy( )( )
σ σσ σ σ σ
τmax ( )= =+
+−
+12 2
2 2x y x y
xy
σσ σ σ σ
τ σmax ( )=+
+−
+ =x y x yxy r2 2
2 2
Questo criterio si usa di solito per materiali fragili. Per materiali duttili come l’acciaio, si può usareun criterio che attribuisce la crisi alla massima tensione tangenziale:
(caso bidimensionale) (31a)
(caso generale) (31b)
Sottoponendo un provino dello stesso materiale alle prova di trazione, esso raggiungerà losnervamento quando σx = σs . In caso di trazione semplice, le tensioni, com’è ben noto, sono: σx =
σx ; σy = σz = τxy = τxz = τyz = 0, e quindi le tensioni principali valgono proprio σ1 = σx ; σ2 = σ3 = 0.La tensione tangenziale massima sarà data, per le (31), da:
(32)
e, confrontando questa condizione ad esempio con la prima delle (31) si avrà il criterio di resistenzacercato (criterio di snervamento):
(33)
Per i materiali duttili, però, si usa più frequentemente il criterio di Von Mises, che attribuisce la crisiper snervamento ad una tensione tangenziale equivalente data da:
(34)
Dalla solita prova di trazione, risulterà:
σ1 = σx ; σ2 = σ3 = 0 ⇒ τeq2
= σx2
/ 2, (35)
e quindi lo snervamento si avrà quando τeq2
= σs2
/ 2. Confrontando con la (34) si ricava lacondizione di snervamento:
(36)
che può essere riscritta nella forma più nota:
τσ σ σ σ
τmax ( )=−
=−
+1 2 2 2
2 2x y
xy
τσ σ σ σ σ σ
max max( , , )=− − −1 2 1 3 3 2
2 2 2
τσ σ
max = =x s
2 2
22
2 2( )σ σ
τ σx yxy s
−+ =
τσ σ σ σ σ σ
eq2 1 2 2 1 3 2 3 2 2
2 2 2=
−+
−+
−( ) ( ) ( )
( ) ( ) ( )σ σ σ σ σ σ σ1 2 2 1 3 2 3 2 2
2
2 2 2 2
−+
−+
−= s
(37)
Nel caso bidimensionale (σ3 = 0), possiamo sfruttare le espressioni già trovate delle tensioninormali e scrivere:
Nel caso di una trave, avremo σy = σz = 0, τyz = 0. E’ sempre possibile porsi in un riferimento (x, m,
l) in cui risulti τmx = τ ≠ 0; τlx = 0. Allora ci si può ricondurre ad un caso bidimensionale nel piano
(x, m) in cui sono definite le tensioni σ = σx ; τ = τmx ; specializzando la (38), si ottiene la ben notaformula:
(39)
DeformazioniConsideriamo il continuo di fig. (6), sottoposto a vincoli e forze esterne.Ogni punto X del continuo sarà sottoposto ad uno spostamento u(X) (vedi figura). Tali spostamentiprovocheranno delle modifiche nella posizione reciproca dei punti del continuo, cioè delledeformazioni. In particolare, saranno presenti variazioni delle distanze di date coppie di punti(dilatazioni lineari) e variazioni degli angoli formati da date terne di punti (deformazioni angolari).Nel campo monodimensionale, l’usuale definizione di dilatazione lineare è data da:
(40)
con l0 distanza iniziale tra due punti e l distanza finale.Questa definizione viene estesa al caso generale specificando la direzione in cui si vuole rilevare lavariazione di lunghezza. In ogni punto sono quindi definite tante dilatazioni lineari quante sono lepossibili direzioni nello spazio (così come nel campo delle tensioni sono definite le tensioni normalial variare della giacitura n). Si può scrivere allora, in generale,
(41)
Se fissiamo un riferimento (x, y) in un continuo bidimensionale, possiamo ricavare le dilatazioninelle direzioni coordinate x e y. Ad esempio, nella direzione x si ha:
1
21 2
21 3
23 2
2( ) ( ) ( )σ σ σ σ σ σ σ− + − + − = s
ε =−
→liml
l ll0 0
0
0
εnl
n n
nn
l ll
=−
→lim
0 0
0
0
σ σ σ σ σ
σ στ
σ σ σ στ
σ σ σ στ
σ σ σ στ
σ σ σ στ
s
x yxy
x y x yxy
x y x yxy
x y x yxy
x y x yxy
= − + + =
=−
+ ++
+−
+ ++
+−
+
=−
++
+ =−
++
+
1
2
1
24
2 2 2 2 2
1
26
22
26 3
2 23
1 22
12
22
2 2 2 2 2 2 2 2
2 2 2 2 2 2
( ) ( ) ( )
[( ) ] ( ) [( ) ] ( ) [( ) ]
( ) ( ) ( ) ( ) (38)
σσ σ
τ σ τs = + + = +32 2
3 32 2 2 2 2( ) ( )
Figura 6
Nell’ipotesi di piccole deformazioni, risulta per definizione:
ε
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂
∂
xx x
x
x x y y
x x y
dl dldl
d X u X d X u X d X
d X
d Xdud X
d X d X
d X
dxux
dxuy
u
xdx
u
ydx
dx
dxdx
ux
dxux
dxu
xdx
=−
=+ + − −
=
=+ −
=+ + + −
=
= + + + −
0
0
1 1 1
1
1 1 1
1
2 2 2 2 2 2
0 0 0 0
0
12 1
( ) ( )
| | |( , ) ( , )| |( , )|
|( , )|
( ) ( ) (42)
(43)
Allora, nell’espressione (42) si possono eliminare i termini quadratici perché infinitesimi di ordinesuperiore:
(44)
infine, espandendo in serie al primo ordine la radice quadrata, si ottiene:
(45)
Ragionando in modo analogo per le altre direzioni coordinate, si ottiene:
(46)
La deformazione angolare è definita dall’incremento dell’angolo di due direzioni ortogonali:
(47)
dove il tratto che unisce i due vettori indica l’angolo compreso tra di essi.Fissato il solito riferimento cartesiano (x,y), si avrà (vedi fig.5):
(48)
L’angolo β puo essere ricavato mediante la nota formula che definisce il coseno dell’angoloformato da due vettori:
∂∂
ux
i ji
j
<< ∀1 ,
ε∂∂x
xux
= + −1 2 1
ε∂∂x
xux
=
ε∂
∂ε
∂∂y
yz
zu
yuz
= =;
γ nm n m n ml l l l= −0 0
γ β βπ
βxy = − = −0 2
cos| || |
[ ( ) ( )] [ ( ) ( )]
| || |
[ ] [ ]
| || |
β =×
=+ + − × + + −
=
=+ × +
=
d x d xd x d x
d X u X d X u X d X u X d X u Xd x d x
d Xdud X
d X d Xdud X
d X
d x d x
1 2
1 2
1 1 2 2
1 2
1 1 2 2
1 2
=+ + + × + + +
=[( , ) ( , )] [( , ) ( , )]
| || |
dxdudx
dxdudy
du
dxdx
du
dydy
dudx
dudy
dydu
dx
du
dydy
d x d x
x x y y x x y y0 0 0 0 0 0
1 2
dove, nell’ultimo passaggio, si è tenuto conto dell’ipotesi di piccole deformazioni.Allora la deformazione angolare cercata vale proprio:
(50)
Le deformazioni, di cui abbiamo mostrato il significato geometrico, sono le coordinate di un tensoredenominato tensore della deformazione εε:
εε = (caso bidimensionale)
εε = (caso generale) (51)
Come per tutti i tensori, anche per εε si definiscono i valori principali (deformazioni principali) ε1 e
ε2. Inoltre, essendo simmetrico, è strettamente analogo al tensore della tensione σσ e si può costruirein modo del tutto analogo il cerchio di Mohr delle deformazioni (nel caso bidimensionale) a partiredalle leggi di trasformazione:
Relazioni elastichePer molti materiali di interesse costruttivo sussiste, in un ampio campo di deformazioni e tensioni,una relazione lineare tra σσ e εε. Per esprimerla, si usa ricorrere, per motivi di semplicità, direttamentealle coordinate σij e εij dei due tensori coinvolti.Supponiamo di sottoporre un prisma di materiale omogeneo a trazione lungo la coordinata x (vedifig. 7). Tale trazione provocherà un allungamento nella direzione di applicazione della tensione euna contrazione nelle altre due direzioni. L’allungamento e le contrazioni sono proporzionali allatensione applicata e valgono:
εx = σx / E; εy = -νσx / E; εz = -νσx / E , (53)
dudy
du
dxsenx y
xy xy xy+ = = − = =cos cos( )βπ
γ γ γ2
εx γxy / 2
γyx / 2 εy
εx γxy / 2 γxz / 2
γyx / 2 εy γyz / 2
γzx / 2 γzy / 2 εz
(49)
=+ × +
=
=+ + +
+ += +
( , ) ( , )
| || |
( ) ( )
dxdudx
dxdu
dxdx
dudy
dy dydu
dydy
d x d x
dudy
dxdydudx
dudy
dxdydu
dxdxdy
du
dx
du
dydxdy
dx dydudy
du
dx
x y x y
x x x y y y
x y
x y
1 2
1 1ε ε
dove E è il modulo di Young, e si esprime in N/m2, e ν è il coefficiente di contrazione laterale,adimensionale.
Figura 7
Se si applicano al prisma di fig. 7 anche le tensioni normali σy e σz, si otterranno allungamenti nelladirezione della tensione proporzionali secondo 1/E e contrazioni nelle altre due direzioni concoefficiente di proporzionalità -ν / E. Applicando contemporaneamente le tre tensioni normali, gliallungamenti risultanti saranno dati dalla somma degli allungamenti provocati da ciascuna tensione:
(54)
Se invece si applicano al prisma delle tensioni tangenziali, esso reagirà semplicemente con unadeformazione angolare nella stessa direzione:
γxy = τxy /G
γxz = τxz /G (55)
γyz = τyz /G
dove:
(56)
σx σy σz
εx = σx / E - νσy / E - νσz / E
εy = -νσx / E + σy / E - νσz / E
εz = -νσx / E - νσy / E + σz / E
GE
=+2 1( )ν
Si usa scrivere le relazioni elastiche appena ricavate in forma matriciale, e cioè:
(57)
In forma compatta, le relazioni elastiche si esprimono con le notazioni:
εε = E-1σσ ⇔ σσ = E εε (58)
La matrice E prende il nome di matrice di rigidezza del materiale e si ricava invertendo la E-1:
(59)
dove la costante λ vale:
(60)
Si noti che εε e σσ non sono vettori come pure E non è un tensore: infatti ad essi non si possonoapplicare le leggi di trasformazione delle coordinate mostrate in precedenza. La notazione compattaha significato soltanto per un fissato sistema di riferimento; in altre parole, se si vogliono esprimerele relazioni elastiche in un altro riferimento, occorre prima calcolare separatamente le componentidi σσ o εε come tensori sfruttando le leggi di trasformazione (16) e poi inserirle in una delle duerelazioni (58). Ad esempio, nel caso bidimensionale, possiamo sfruttare le inverse delle leggi ditrasformazione (19) e (52) già calcolate, che si ottengono semplicemente cambiando α in –α:
Se il materiale è isotropo (e quindi la E è dalla dalla (59)), allora la matrice di rigidezza non cambiaal variare del riferimento:
E’ = (Qσ)-1EQε = E. (67)
Stati piani di tensione e deformazioneIn molti casi di interesse pratico non è necessario prendere in considerazione tutte le tensioni o ledeformazioni definite nello spazio, ma soltanto le quantità definite in un certo piano (vedi fig.8).Nel caso di stato di tensione piano, se il piano in cui giacciono le tensioni che ci interessano è quellodi normale z, risulterà:
σz = τxz = τyz = 0, (68)
e le relazioni elastiche non banali si riducono alle seguenti:
Mettendo momentaneamente da parte l’espressione di εz, si può scrivere una forma matricialeridotta delle relazioni elastiche che comprende solo quantità del piano xy:
(70)
a questa va aggiunta, come già detto, l’espressione di εz:
εz = -ν(σx + σy) / E. (71)
Figura 8
εεγ
ν
νσστ
x
y
xy
x
y
xy
E E
E E
G
=
−
−
10
10
0 01
La relazione inversa si ricava invertendo la matrice di rigidezza ridotta:
(72)
Nel caso di stato di deformazione piano, risulterà:
εz = γxz = γyz = 0, (73)
e le relazioni elastiche diventano:
εx = σx / E - νσy / E - νσz / E (74)
εy = -νσx / E + σy / E - νσz / E
εz = -νσx / E - νσy / E + σz / E = 0
γxy = τxy /G .
Dalla terza delle espressioni precedenti si ricava σz e si sostituisce il valore ricavato nelle prime dueequazioni:
-νσx / E - νσy / E + σz / E = 0 ⇒ σz = ν(σx + σy) (75)
εx = σx / E - νσy / E - ν2(σx + σy)/ E = (1 - ν2)σx / E - ν(1 - ν)σy / E
εy = -νσx / E + σy / E - ν2(σx + σy)/ E = - ν(1 - ν)σx / E + (1 - ν2)σy / E (76)
La forma matriciale ridotta nel caso di stato di deformazione piano è allora:
(77)
mentre la relazione inversa si scrive:
(78)
σστ
νν
νν
ν ν
εεγ
x
y
xy
x
y
xy
E E
E E
G
=
− −
− −
( ) ( )
( ) ( )
1 10
1 10
0 0
2 2
2 2
εεγ
ν ν ν
ν νσστ
x
y
xy
x
y
xy
E E
E E
G
=
−−
+
−+ −
1 10
1 10
0 01
2
2
( )
( )
σστ
νν ν
νν ν
νν ν
νν ν
εεγ
x
y
xy
x
y
xy
E E
E E
G
=
−+ − + −
+ −−
+ −
( )
( )( ) ( )( )
( )( )
( )
( )( )
1
1 1 2 1 1 20
1 1 2
1
1 1 20
0 0
a questa va aggiunta l’espressione di σz ricavata dalle formule (75) e (78):
σ ν σ σν νν ν
εν
ν νε
νν ν
εν νν ν
ε
νν ν
ε ε
z x y x y x y
x y
E E E E
E
= + =−
+ −+
+ −+
+ −+
−+ −
=
=+ −
+
( )( )
( )( ) ( )( ) ( )( )
( )
( )( )
( )( )( )
1
1 1 2 1 1 2 1 1 2
1
1 1 2
1 1 2
2 2
(79)
2. MISURA DELLE DEFORMAZIONI MEDIANTE ESTENSIMETRI
Principio di funzionamentoI criteri di sicurezza ai quali bisogna riferirsi nel progetto e nella verifica di una struttura o di uncomponente meccanico sono scritti in genere in termini di tensioni. Purtroppo non è possibilemisurare direttamente, nemmeno in modo approssimato, le tensioni su elementi strutturali reali.D’altra parte, è possibile misurare (approssimativamente) le deformazioni, poiché esse sonodeterminate da relazioni geometriche tra punti.Allora, se il materiale è elastico lineare (cioè se la relazione tra tensioni e deformazioni è come la(58)), è possibile risalire dalla misura delle deformazioni alla valutazione delle tensioni.Il sensore più utilizzato per tali misure si chiama estensimetro (strain gauge).Nella sua forma più elementare questo sensore consiste semplicemente in un filo di materialeconduttore di lunghezza fissata incollato sulla superficie del componente meccanico nel punto in cuisi vuole misurare la deformazione in una certa direzione (fig. 9). Deformando il componente, il filocondividerà la deformazione della zona in cui è incollato. Tale deformazione farà variare laresistenza elettrica del filo in maniera nota, e quindi dalla variazione di resistenza (quantità che simisura facilmente con apparecchiature elettriche) si può risalire alla deformazione del filo e infinealla deformazione del componente meccanico.
Figura 9
Relazione tra deformazione e resistenza elettricaLa resistenza di un conduttore filiforme si esprime mediante la formula:
, (80)
dove ρ è la resistività del materiale, l la lunghezza del filo e A l’area della sezione retta.Differenziando la relazione (80), si ottiene:
RlA
= ρ
. (81)
Passando dalle quantità infinitesime alle (piccole) differenze finte la (81) diventa:
. (82)
Supponiamo che la sezione retta del filo sia di forma quadrata con lato di lunghezza b. Allora,operando direttamente sulle differenze finite, risulterà:
. (83)
Ma essendo il filo sottoposto a trazione semplice, la contrazione laterale è nota:
, (84)
e quindi si può scrivere:
. (85)
Si pone, per definizione,
(86)
dove SA è la sensibilità complessiva del sensore alla deformazione ε. I materiali di cui sono
costituiti gli estensimetri sono tali che nel loro campo di utilizzo il rapporto (∆ρ/ρ)/ε è all’incircacostante (e piccolo); in tal modo si può ritenere costante la sensibilità SA.
Valutando anche il piccolo contributo di (∆ρ/ρ)/ε, il valore medio della sensibilità per gliestensimetri ordinari è circa 2; d’altra parte, le deformazioni che usualmente si misurano su pezzimeccanici sono dell’ordine delle decine di microepsilon (1µε = 10-6) e raramente superano i 1000µε (cioè 0.001). Perciò le variazioni di resistenza ∆R superano raramente il valore 0.002R Ohm.Allora, per rendere apprezzabile la variazione di resistenza ∆R, occorre imporre la maggioreresistenza possibile compatibilmente con le caratteristiche costruttive e funzionali del conduttore.Tenendo presente la relazione (80), il modo migliore per aumentere la resistenza è allungare il filocostituente il sensore. Poiché però la lunghezza complessiva dev’essere piccola (altrimenti non sipuò misurare la deformazione che è un allungamento locale e quindi relativo ad un punto), sidispone il filo come in fig. 10.Questa disposizione, però, introduce ulteriori sensibilità del sensore alle deformazioni trasversali eangolari. In generale, quindi, la variazione di resistenza di un estensimetro può essere espressamediante la relazione:
dR dlA
dlA
ldAA
dRR
d dll
dAA
= + − ⇒ = + −ρ ρ ρρ
ρ2
∆ ∆ρ ∆ ∆RR
ll
AA
= + −ρ
∆ ∆ ∆ ∆AA
bb
b bb
bb
= = =( )2
2 2
22
∆ ∆bb
ll
= −ν
∆ ∆ρ ∆ ∆ρRR
ll
= + + = + +ρ
νρ
ν ε( ) ( )1 2 1 2
∆ ∆ρRR
S SA A= ⇒ = + +ε νρ
ε1 2
(87)
In altre parole, il sensore sarà sensibile all’allungamento in direzione assiale εa (l’unico che
interessa), all’allungamento in direzione trasversale εt e alla variazione angolare γat.
Figura 10
Per quanto riguarda la sensibilità alle variazioni angolari SS, essa è molto più piccola delle altre, eper i nostri scopi può essere senz’altro trascurata.Della sensibilità trasversale St si tiene conto in pratica nel modo seguente.Quando le case produttrici testano gli estensimetri, eseguono una misura di prova su provinisottoposti a trazione semplice. In tal modo si ricava una relazione diretta tra variazione di resistenzaed allungamento assiale nel caso specifico di trazione semplice:
1) si misura ∆R/R con l’estensimetro2) si misura εa con altri mezzi
3) si definisce la sensibilità compessiva SA = (∆R/R) / εa.
In realtà, il provino è sottoposto a due deformazioni superficiali: εa e εt = - νεa. Confrontando lasensibilità complessiva con la (87), si ricava
(88)
Allora si può riscrivere la (87) con i due coefficienti SA e Kt = St / Sa forniti dalle case produttrici:
. (89)
∆RR
S S Sa a t t s at= + +ε ε γ
∆RR
S S S S S S S
S S S
a a t t a a t a a t a A a
A a t
= + = − = − =
⇒ = −
ε ε ε νε ν ε ε
ν
( )
∆RR
SK
KAt
a t t=−
+1
1 νε ε( )
Nelle applicazioni successive, tenuto conto che il fattore trasversale Kt è di norma trascurabile,considereremo valida la relazione diretta:
, (90)
che, a rigore, vale soltanto per punti del componente in cui risulta e εt = - νεa.
Misura del tensore della deformazioneMediante un singolo estensimetro possiamo misurare la deformazione di in punto in una datadirezione. Se vogliamo conoscere l’intero tensore della deformazione occorre utilizzare, in generale,tre estensimetri incollati all’incirca nello stesso punto posti sceondo tre direzioni diverse (fig. 11).
Figura 11
Infatti le misure, essendo rilevate sulla superficie del componente, sono sempre relative a un puntoin cui lo stato di tensione è piano; in tal caso, sono diverse da zero solo le deformazioni εx, εy e γxy,
oltre a εz che può essere ricavata dalle formule (71) e (72):
. (91)
Fissato un riferimento (x, y) nel punto in cui si vuole effettuare la misura, la deformazione nellagenerica direzione n che forma con l’asse x un angolo α è data dalla prima delle (52) qui riportata:
εn = εx cos2α + εy sen2α + γxy senαcosα
Considerando tre direzioni n, m, l, rispettivamente poste rispetto all’asse x ad un angolo α, β, γ (fig.11), si ottiene un sistema di tre equazioni nelle tre incognite εx, εy e γxy, con i termini noti εn, εm e εl
ricavati dalle misure riportste dai tre estensimetri:
Casi particolariTra i sensori estensimetrici in commercio ve ne sono alcuni costituiti da tre estensimetri posti adangoli fissi tra di loro che hanno il nome di rosette e servono a misurare il tensore delladeformazione nel modo che abbiamo appena illustrato.
Rosetta a 45°La rosetta a 45° è costituita da tre estensimetri con una distanza angolare relativa di 45°. Senell’operazione di incollaggio facciamo coincidere il primo estensimetro con l’asse x delriferimento fissato, avremo quindi:
α = 0° ; β = 45° ; γ = 90° .
Sostituendo questi valori nelle formule (92) avremo:
εn = εx
εm = 0.5 εx + 0.5 εy + 0.5 γxy
εl = εy
ed invertendo,
εx = εn
εy = εl
γxy = 2 εm - (εn + εl )
Dalla relazione tra tensioni e deformazioni valida pe stati piani di tensione (72) possiamo ricavare iltensore delle tensioni in funzione delle misure della rosetta:
Rosetta a deltaEsiste anche la rosetta a 120° (o rosetta a delta), costituita da estensimetri distanziati di 120°. Senell’operazione di incollaggio facciamo coincidere il primo estensimetro con l’asse x delriferimento fissato, avremo:
α = 0° ; β = 120° ; γ = 240° ,
e quindi:
εn = εx
εm = 0.25 εx + 0.75 εy - (�3 / 4) γxy
εl = 0.25 εx + 0.75 εy + (�3 / 4) γxy
ed infine:
εx = εn
εy = (2/3)(εm + εl ) - (1/3)εn
γxy = (2/�3 )(εl - εm )
Questo tipo di rosetta conduce alla seguente valutazione del tensore degli sforzi e delle tensioniprincipali:
; (95)
. (96)
Presenza di un asse di simmetriaSe si vogliono valutare tensioni e deformazioni sull’asse di simmetria (per la geometria e per icarichi) di un componente, occorrono soltanto due estensimetri.Infatti, un asse di simmetria è anche una direzione principale di tensione e deformazione (se ilmateriale è omogeneo e isotropo) e possiamo sfruttare questa informazione ponendo unestensimetro lungo l’asse di simmetria (asse x) e l’altro in posizione ortogonale (asse y). Cosìfacendo, ci siamo posti in un riferimento principale in cui risulta per definizione γxy = 0. Le altredue deformazioni vagono, ovviamente,
εx = εn ; εy = εm .
Allora le tensioni σx e σy, che sono anche tensioni principali, valgono: