1 INSTITUTO TECNOLOGICO DE CULIACAN DEPARTAMENTO DE INGENIERIA ELECTRICA, ELECTRONICA Y ENERGIAS RENOVABLES MANUAL BASICO DE LOS MODULOS PCS DE FESTO DIDACTIC CARRERAS: ING. ELECTRONICA, ING. MECANICA, ING. MECATRONICA, ING. ELECTRICA LABORATORIO DE INSTRUMENTACION Ing. Manuel de Jesús Acosta Portillo
Transcript
1
INSTITUTO TECNOLOGICO DE CULIACAN
DEPARTAMENTO DE INGENIERIA ELECTRICA, ELECTRONICA
Y ENERGIAS RENOVABLES
MANUAL BASICO DE LOS MODULOS PCS DE FESTO DIDACTIC
CARRERAS:
ING. ELECTRONICA, ING. MECANICA, ING. MECATRONICA,
ING. ELECTRICA
LABORATORIO DE INSTRUMENTACION
Ing. Manuel de Jesús Acosta Portillo
2
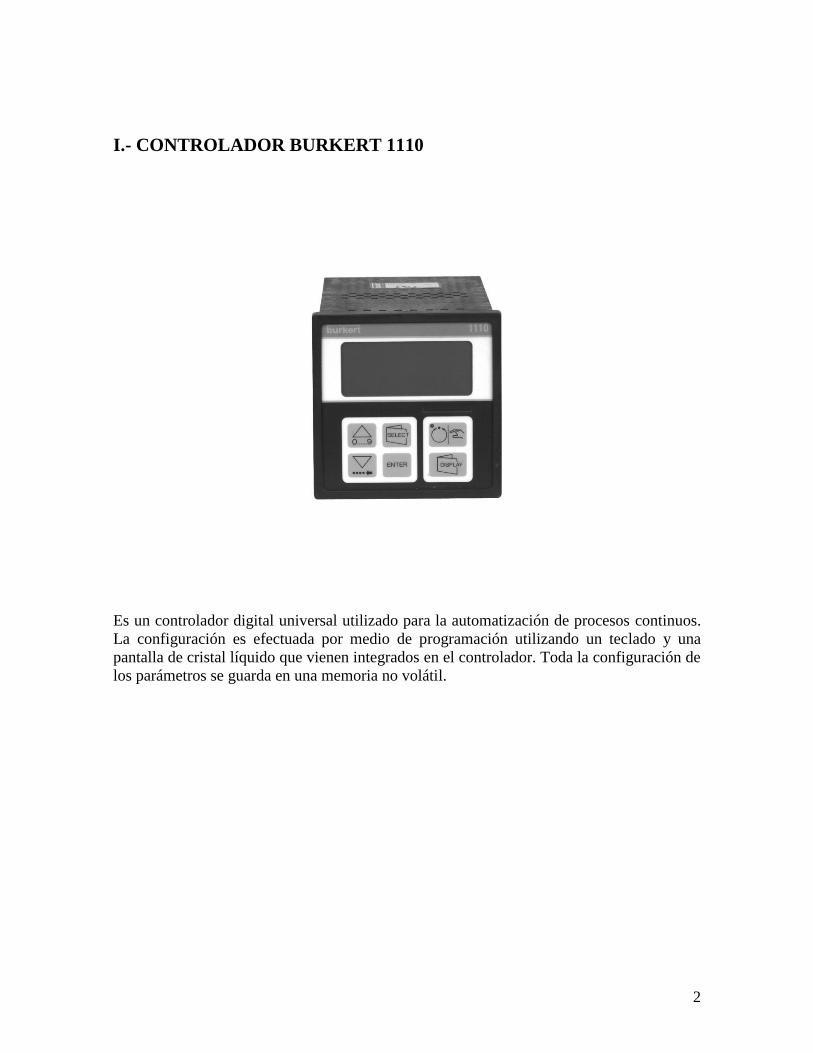
I.- CONTROLADOR BURKERT 1110
Es un controlador digital universal utilizado para la automatización de procesos continuos.
La configuración es efectuada por medio de programación utilizando un teclado y una
pantalla de cristal líquido que vienen integrados en el controlador. Toda la configuración de
los parámetros se guarda en una memoria no volátil.
3
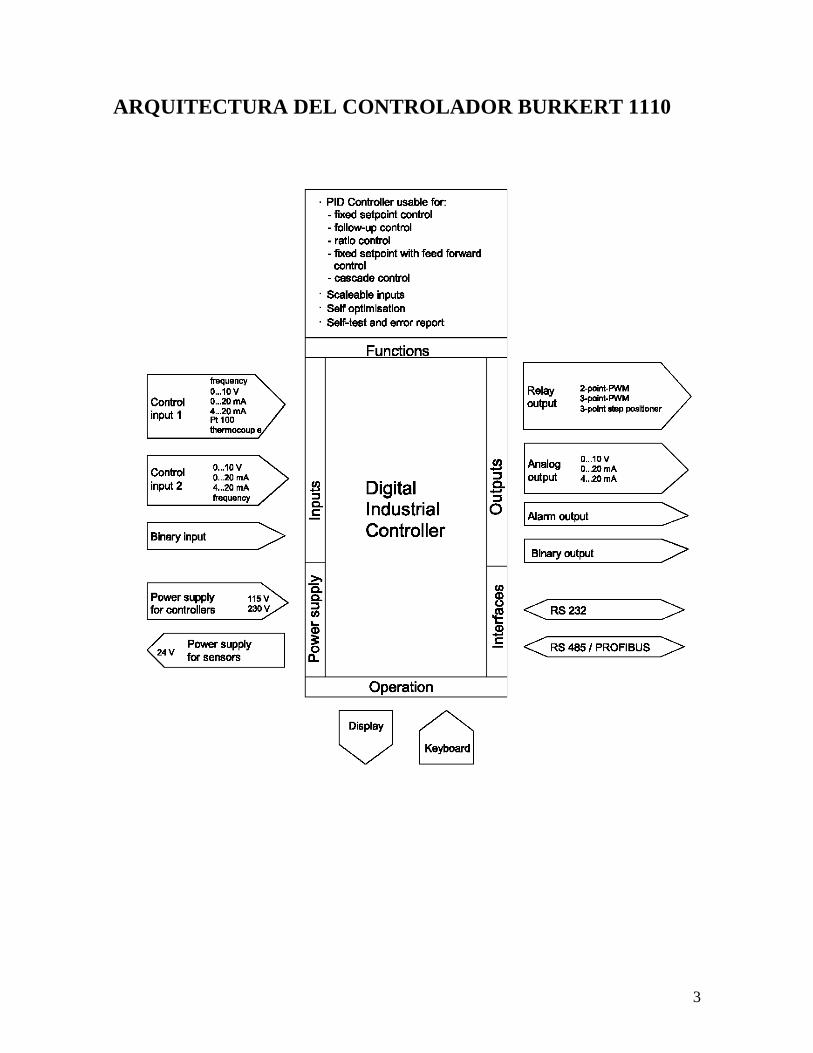
ARQUITECTURA DEL CONTROLADOR BURKERT 1110
4
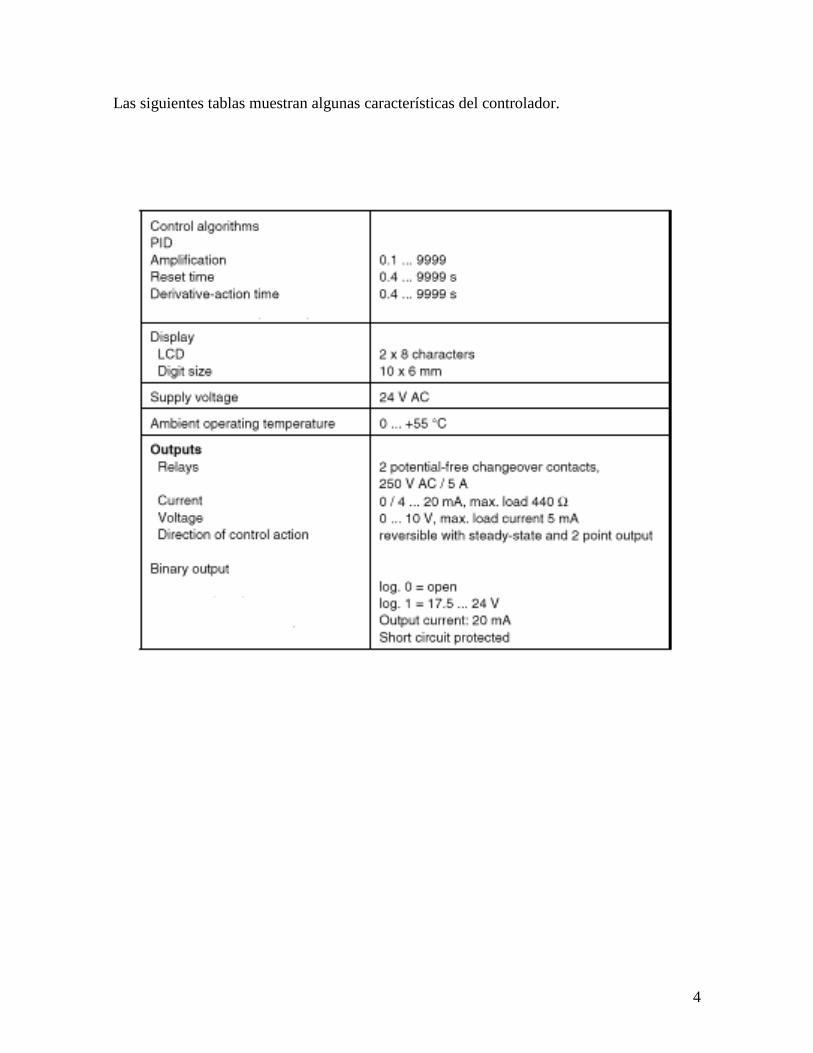
Las siguientes tablas muestran algunas características del controlador.
5
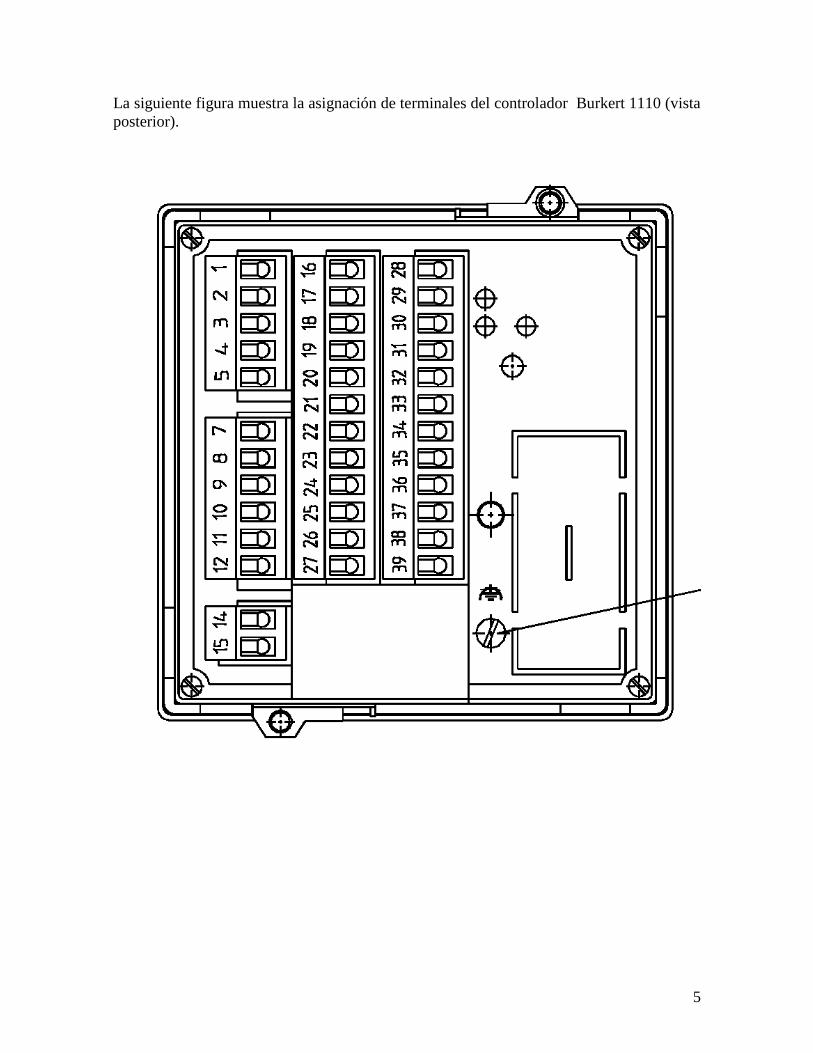
La siguiente figura muestra la asignación de terminales del controlador Burkert 1110 (vista
posterior).
6
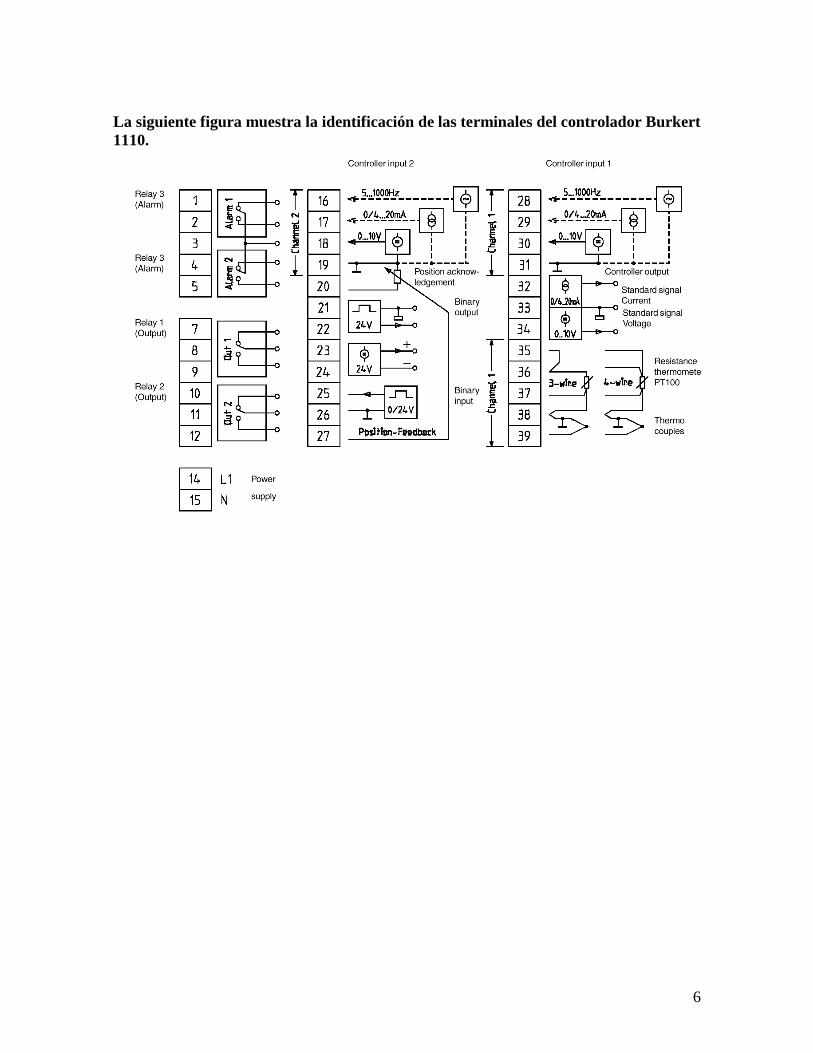
La siguiente figura muestra la identificación de las terminales del controlador Burkert
1110.
7
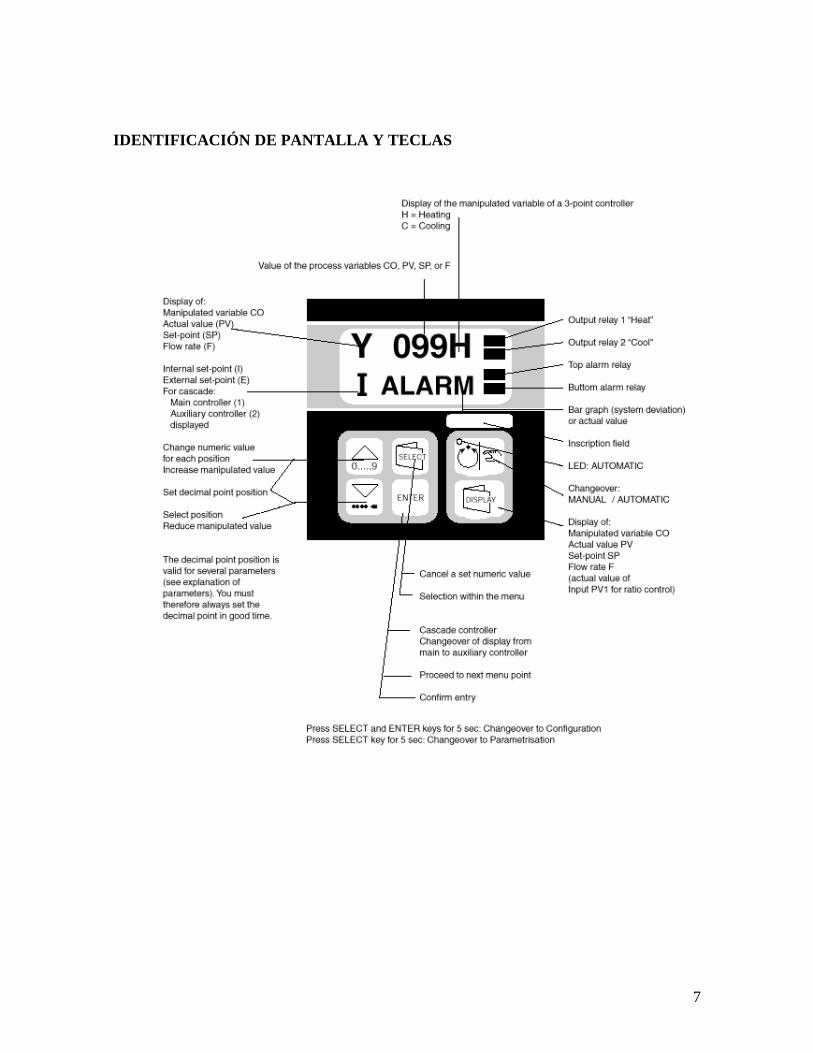
IDENTIFICACIÓN DE PANTALLA Y TECLAS
8
MENÚ PRINCIPAL DE CONFIGURACION (CHANGEOVER TO
CONFIGURATION).
STRUMENU (DEFINICIÓN DEL TIPO DE CONTROL)
9
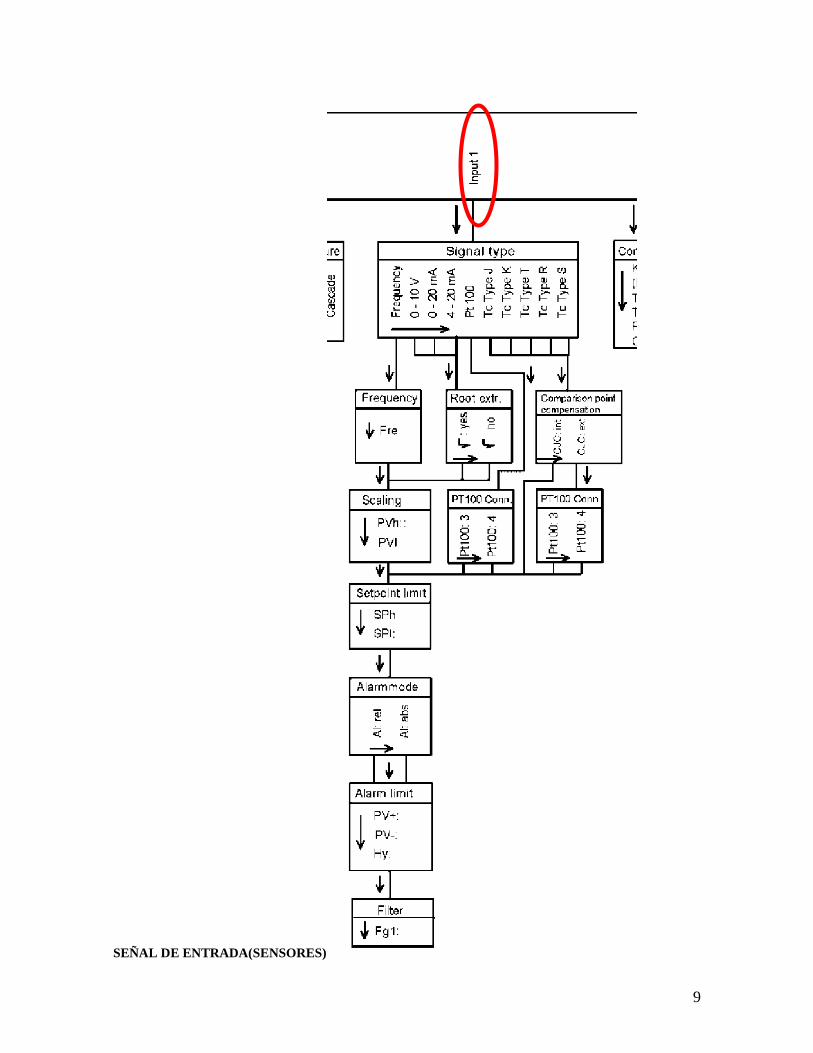
SEÑAL DE ENTRADA(SENSORES)
10
MENU DE SINTONIZACIÓN DEL CONTROLADOR
11
MENU PARA CONFIGURAR LA SEÑAL DE SALIDA (ACTUADOR)
12
MENU PARA CONFIGURAR UNA SEÑAL DE SALIDA CONTÍNUA
13
MENU PARA CONFIGURAR UNA SEÑAL DE SALIDA NO CONTÍNUA
14
MENU PARA ESTABLECER LA SALIDA DEL CONTROLADOR EN CASO DE
ALARMA
15
II.- ESTACIONES DE CONTROL.
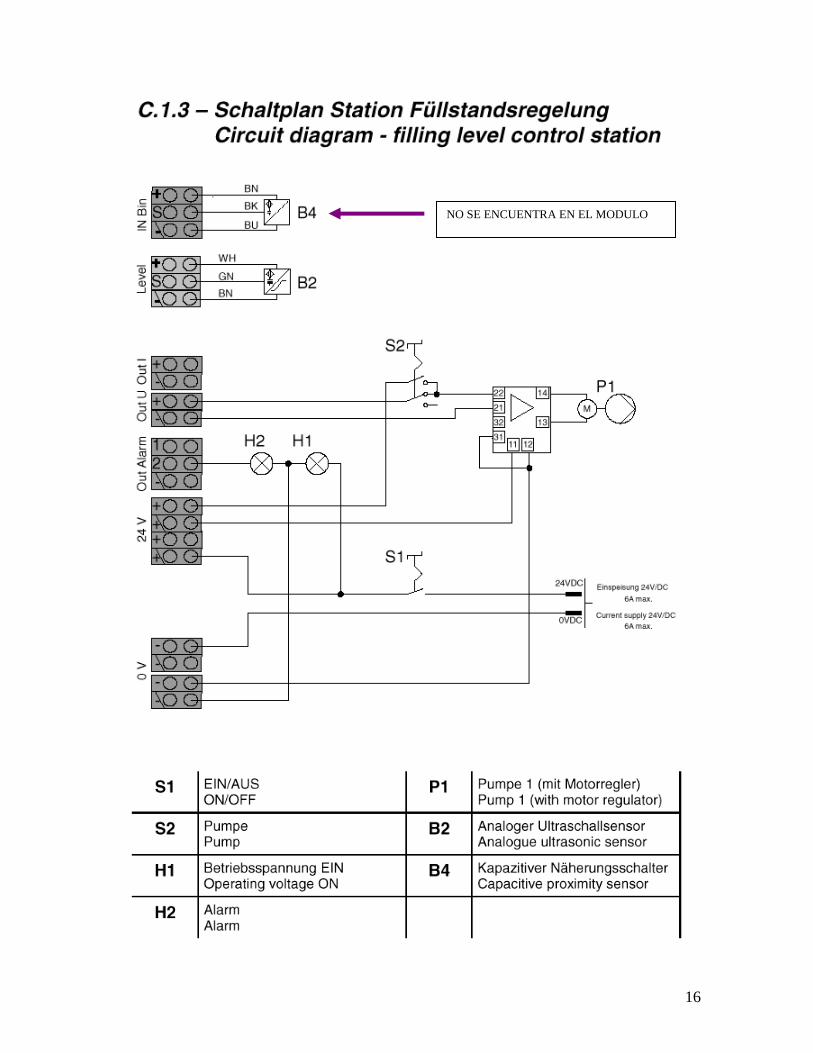
ESTACION DE NIVEL
16
NO SE ENCUENTRA EN EL MODULO
17
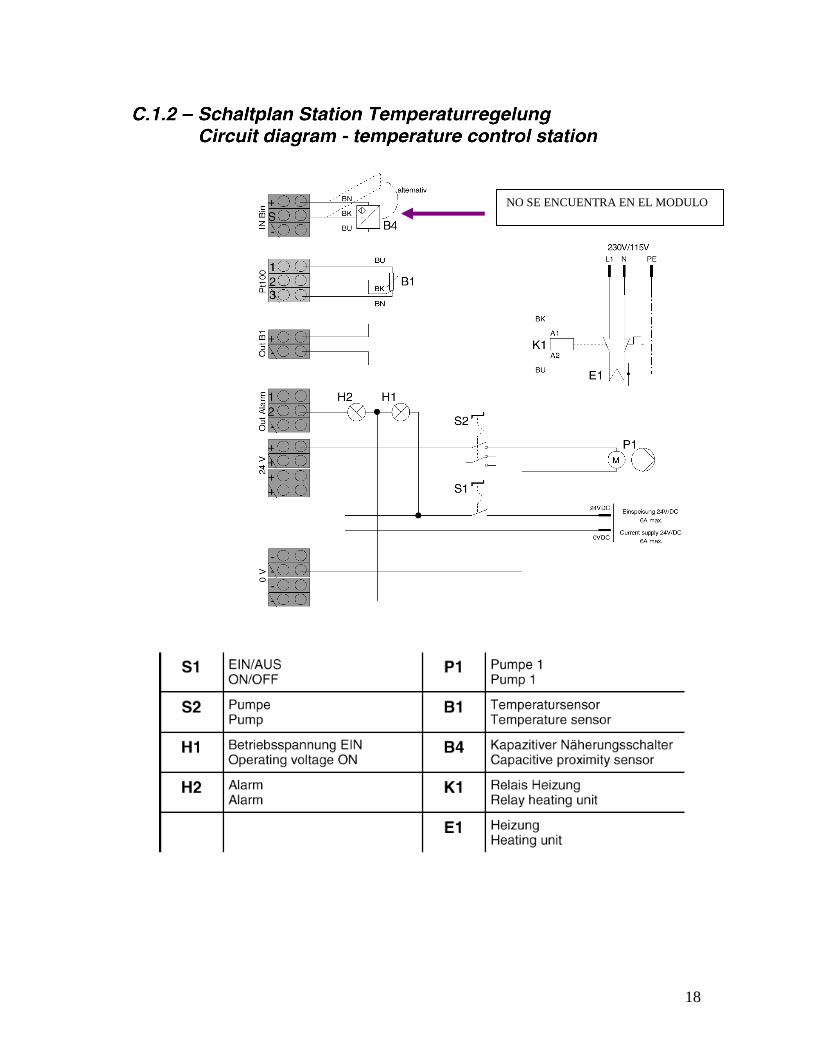
ESTACION DE TEMPERATURA
18
NO SE ENCUENTRA EN EL MODULO
19
ESTACION DE FLUJO
20
NO SE ENCUENTRA EN EL MODULO
21
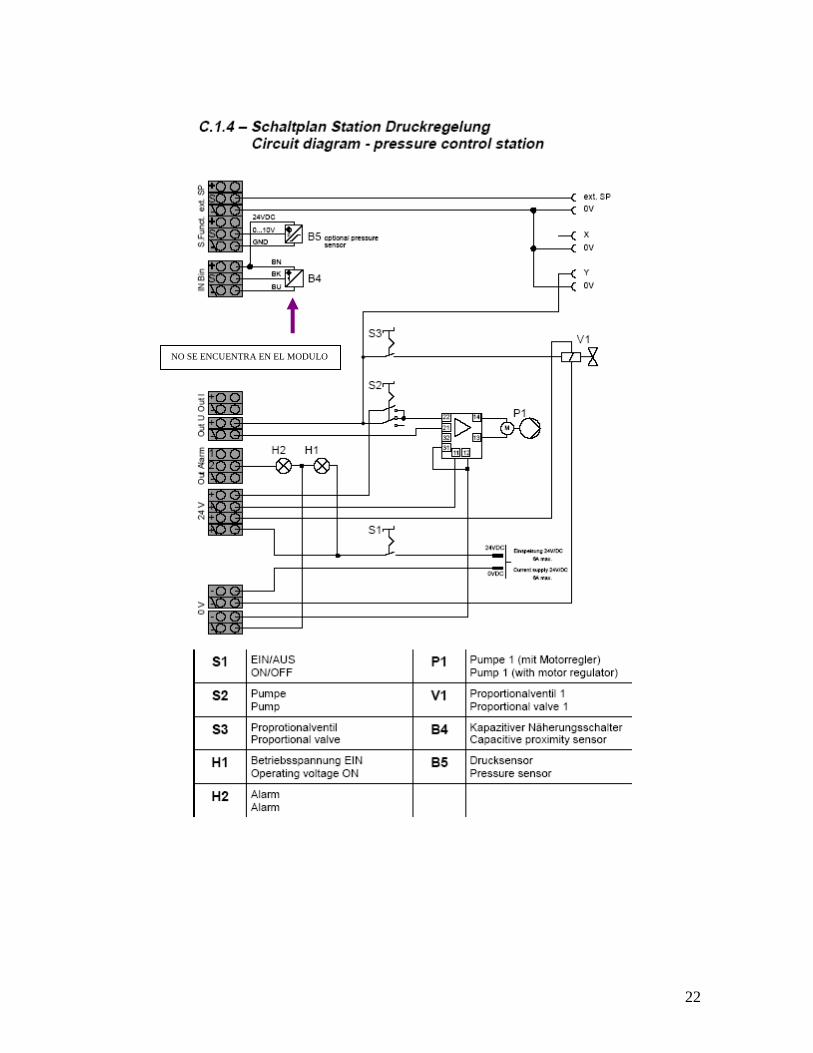
ESTACION DE PRESION
22
NO SE ENCUENTRA EN EL MODULO
23
III.- SENSORES
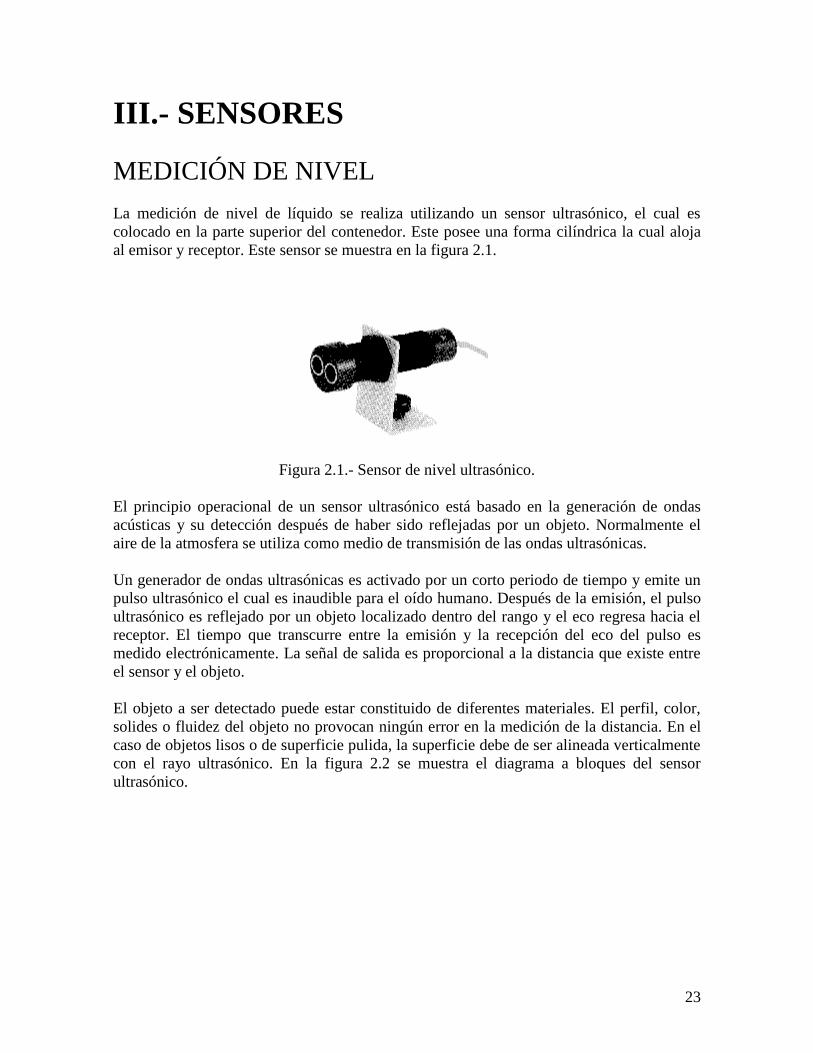
MEDICIÓN DE NIVEL
La medición de nivel de líquido se realiza utilizando un sensor ultrasónico, el cual es
colocado en la parte superior del contenedor. Este posee una forma cilíndrica la cual aloja
al emisor y receptor. Este sensor se muestra en la figura 2.1.
Figura 2.1.- Sensor de nivel ultrasónico.
El principio operacional de un sensor ultrasónico está basado en la generación de ondas
acústicas y su detección después de haber sido reflejadas por un objeto. Normalmente el
aire de la atmosfera se utiliza como medio de transmisión de las ondas ultrasónicas.
Un generador de ondas ultrasónicas es activado por un corto periodo de tiempo y emite un
pulso ultrasónico el cual es inaudible para el oído humano. Después de la emisión, el pulso
ultrasónico es reflejado por un objeto localizado dentro del rango y el eco regresa hacia el
receptor. El tiempo que transcurre entre la emisión y la recepción del eco del pulso es
medido electrónicamente. La señal de salida es proporcional a la distancia que existe entre
el sensor y el objeto.
El objeto a ser detectado puede estar constituido de diferentes materiales. El perfil, color,
solides o fluidez del objeto no provocan ningún error en la medición de la distancia. En el
caso de objetos lisos o de superficie pulida, la superficie debe de ser alineada verticalmente
con el rayo ultrasónico. En la figura 2.2 se muestra el diagrama a bloques del sensor
ultrasónico.
24
Figura 2.2.- Diagrama a bloques del sensor ultrasónico.
Las terminales del sensor están codificadas de la siguiente manera:
El sensor está protegido contra polarización inversa. Idealmente la salida del sensor debe de
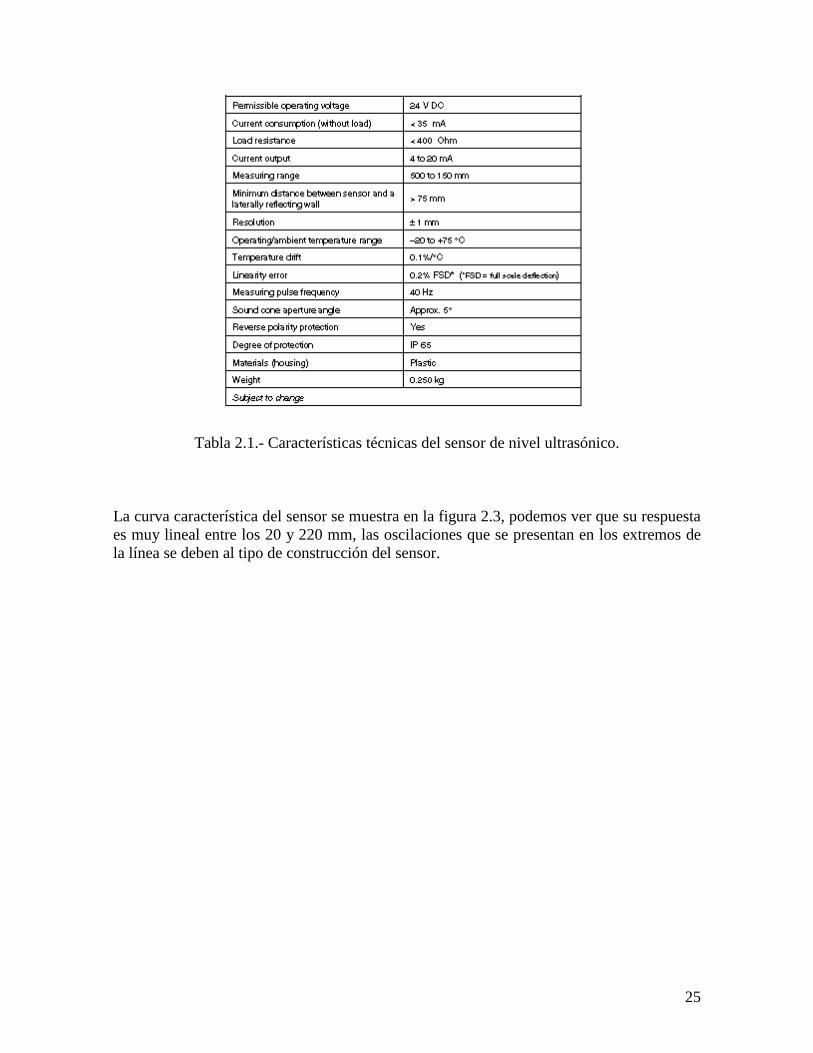
conectarse a una carga de cero ohm. La tabla 2.1 muestra las características técnicas del
sensor.
25
Tabla 2.1.- Características técnicas del sensor de nivel ultrasónico.
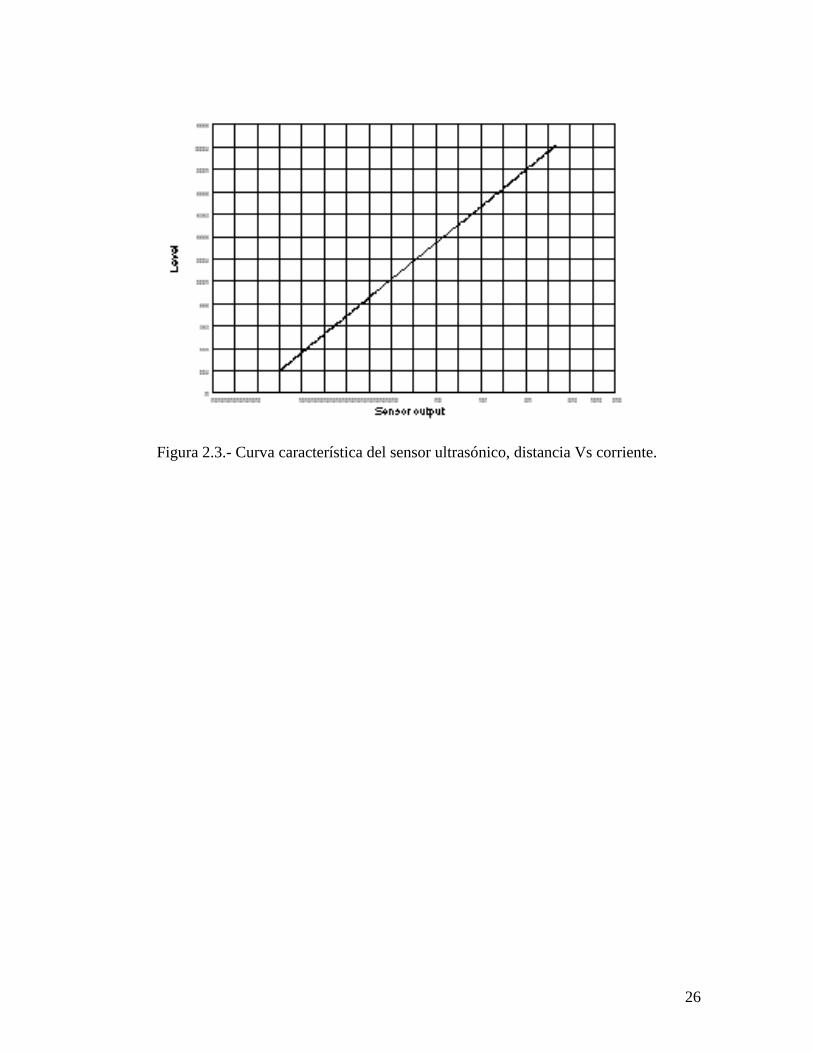
La curva característica del sensor se muestra en la figura 2.3, podemos ver que su respuesta
es muy lineal entre los 20 y 220 mm, las oscilaciones que se presentan en los extremos de
la línea se deben al tipo de construcción del sensor.
26
Figura 2.3.- Curva característica del sensor ultrasónico, distancia Vs corriente.
27
MEDICIÓN DE TEMPERATURA
Figura 2.4.- Sensor de temperatura.
La medición de temperatura se realiza con un termómetro resistivo. El sensor consiste de
un tubo blindado, un cabezal de conexión y el elemento de medición, la figura 2.4 muestra
el sensor de temperatura. Durante la instalación debemos de asegurar que la temperatura
medida es la más representativa dentro del proceso.
El elemento de medición es un detector térmico resistivo (RTD) cuyo valor resistivo es una
función de la temperatura. En este elemento de medición se utiliza el RTD tipo Pt 100
cuyos valores resistivos se muestran en la tabla 2.2. La tabla 2.3 muestra las características
técnicas del sensor de temperatura.
Tabla 2.2.- Valores resistivos del RTD Pt 100.
28
Tabla 2.3.- Características técnicas del sensor de temperatura.
MEDICIÓN DE FLUJO
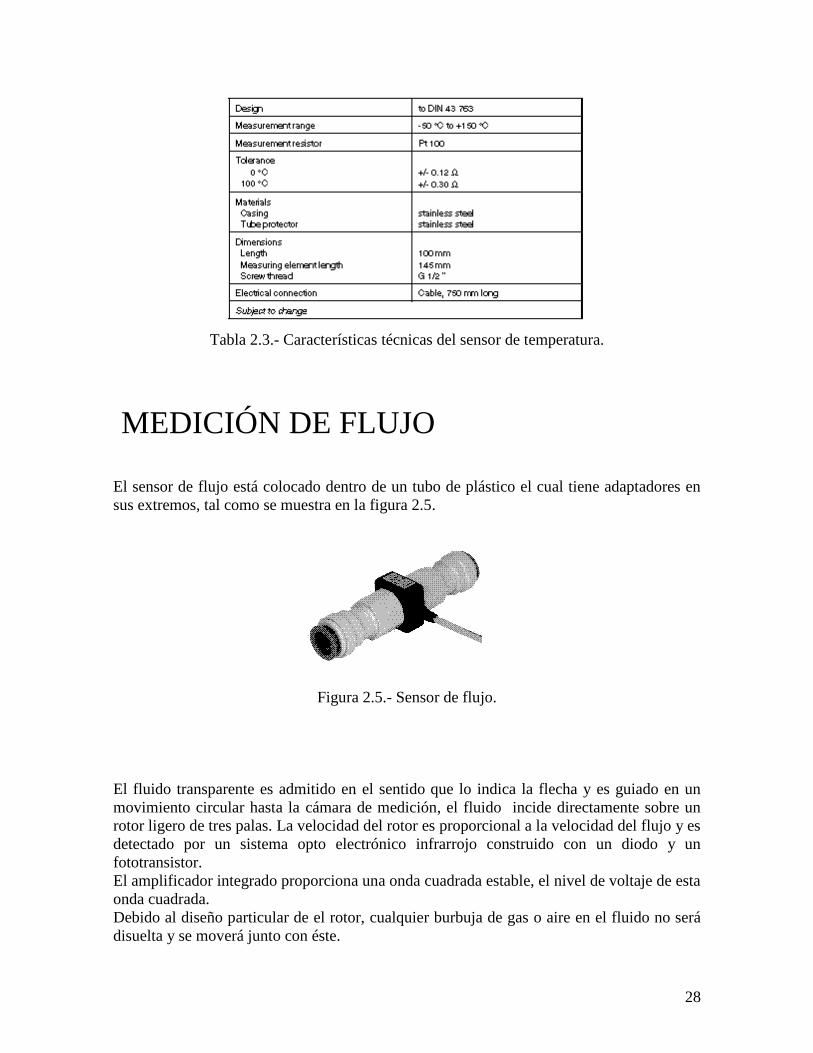
El sensor de flujo está colocado dentro de un tubo de plástico el cual tiene adaptadores en
sus extremos, tal como se muestra en la figura 2.5.
Figura 2.5.- Sensor de flujo.
El fluido transparente es admitido en el sentido que lo indica la flecha y es guiado en un
movimiento circular hasta la cámara de medición, el fluido incide directamente sobre un
rotor ligero de tres palas. La velocidad del rotor es proporcional a la velocidad del flujo y es
detectado por un sistema opto electrónico infrarrojo construido con un diodo y un
fototransistor.
El amplificador integrado proporciona una onda cuadrada estable, el nivel de voltaje de esta
onda cuadrada.
Debido al diseño particular de el rotor, cualquier burbuja de gas o aire en el fluido no será
disuelta y se moverá junto con éste.
29
El sensor se puede colocar en cualquier posición para hacer la medición. La dirección del
flujo es indicada por una flecha que se encuentra grabada en el cuerpo del sensor.
Zonas de estabilización para flujos hacia arriba o hacia abajo no son necesarias.
Las fluctuaciones en la razón de flujo o pulsaciones de éste, no afectan los resultados de la
medición.
El sensor posee un filtro protector, este se encuentra colocado en la parte de entrada del
flujo y su función es la de proteger al rotor de los sólidos suspendidos en el fluido, cabe
aclarar que este sensor es solo para fluidos limpios y cristalinos.
Todas las partes del cuerpo del sensor que están en contacto con el fluido están fabricadas
de Poli vinil Fluorado.
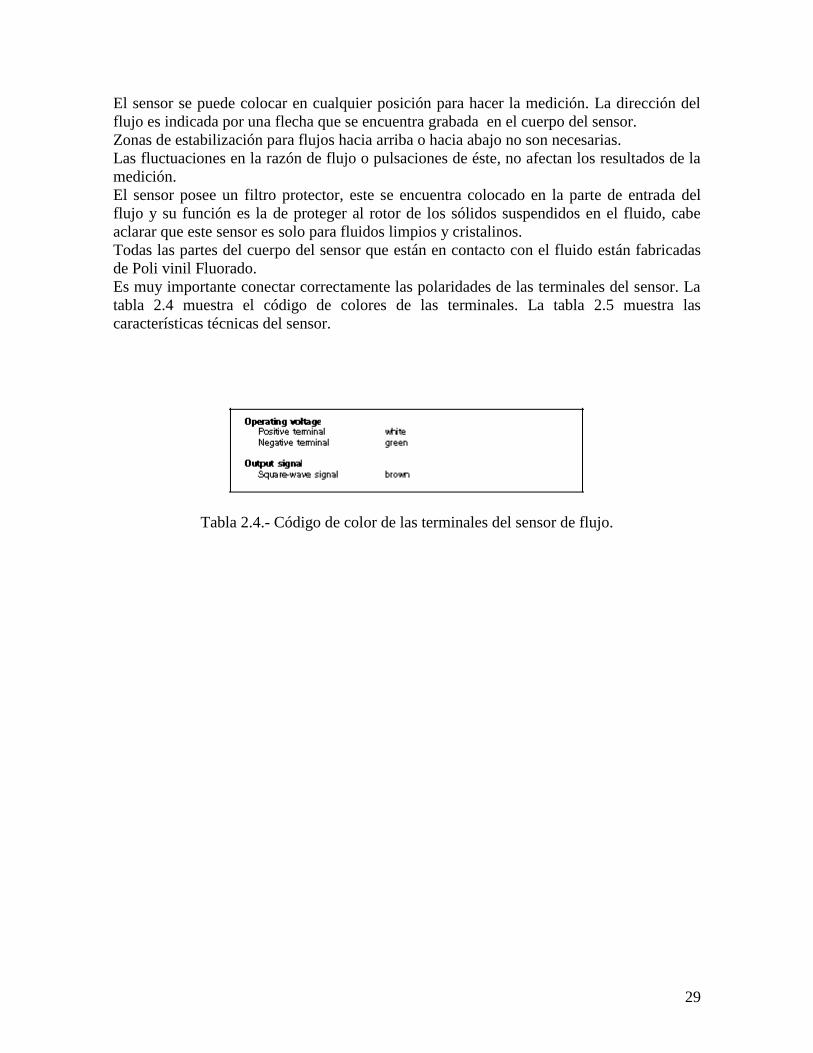
Es muy importante conectar correctamente las polaridades de las terminales del sensor. La
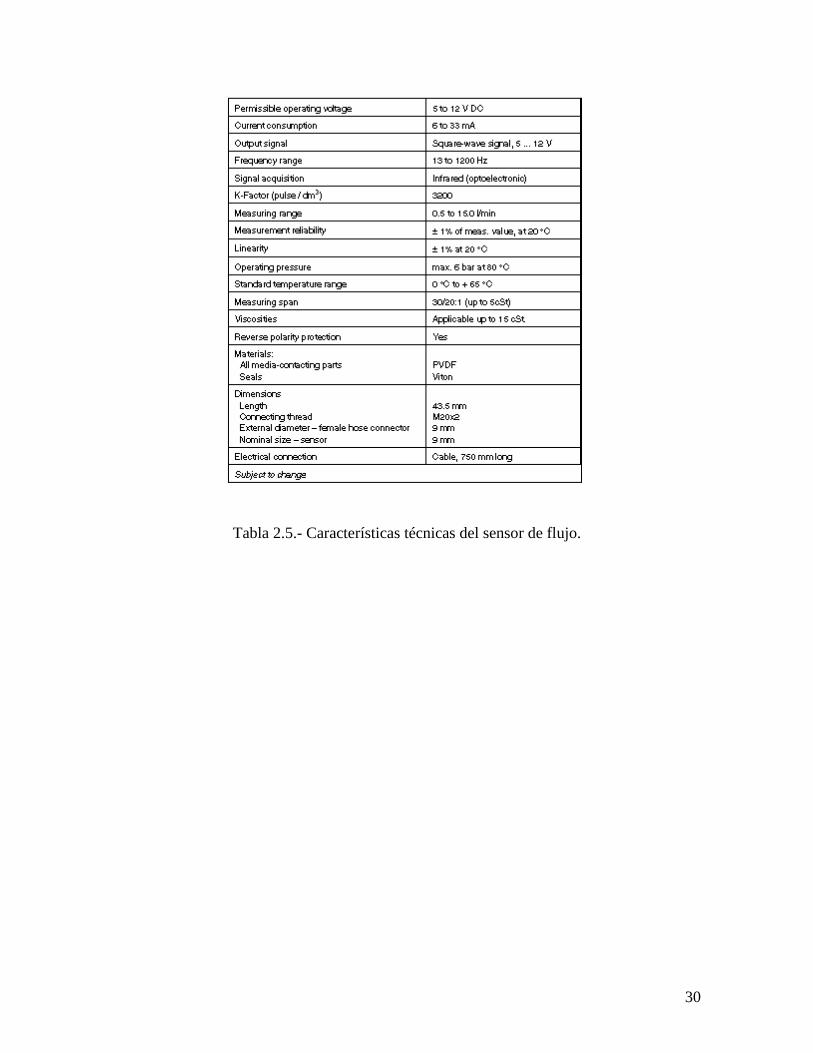
tabla 2.4 muestra el código de colores de las terminales. La tabla 2.5 muestra las
características técnicas del sensor.
Tabla 2.4.- Código de color de las terminales del sensor de flujo.
30
Tabla 2.5.- Características técnicas del sensor de flujo.
31
MEDICIÓN DE PRESIÓN
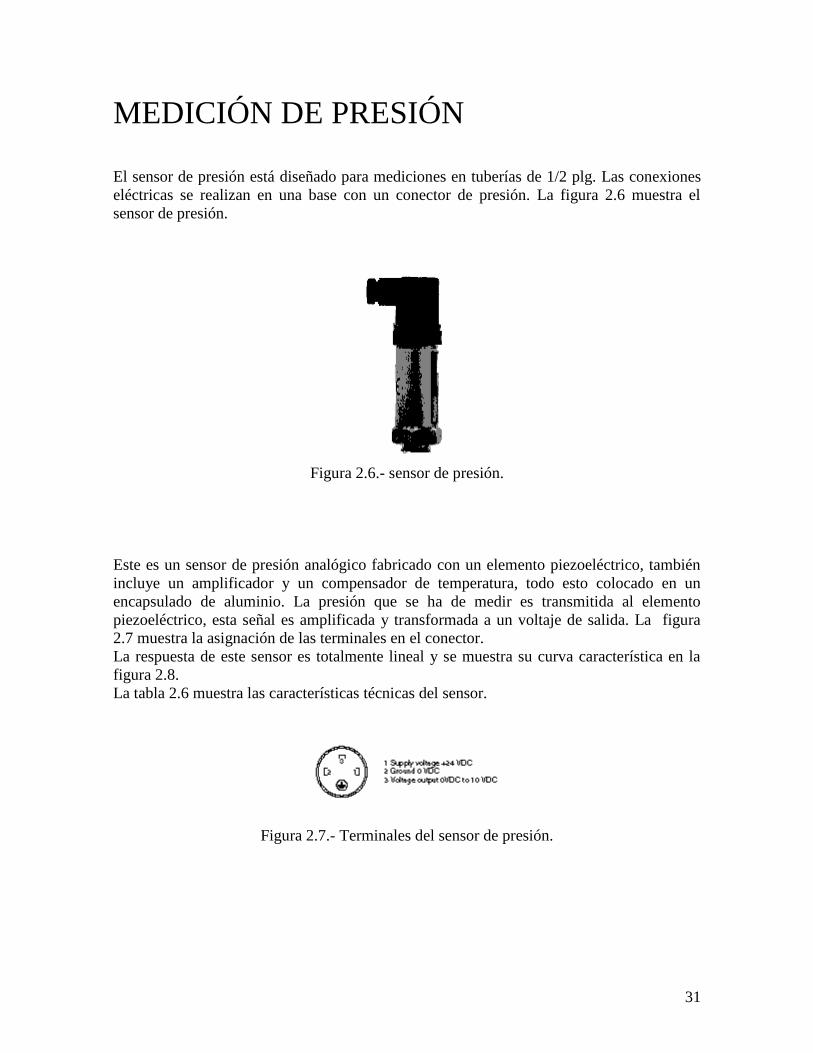
El sensor de presión está diseñado para mediciones en tuberías de 1/2 plg. Las conexiones
eléctricas se realizan en una base con un conector de presión. La figura 2.6 muestra el
sensor de presión.
Figura 2.6.- sensor de presión.
Este es un sensor de presión analógico fabricado con un elemento piezoeléctrico, también
incluye un amplificador y un compensador de temperatura, todo esto colocado en un
encapsulado de aluminio. La presión que se ha de medir es transmitida al elemento
piezoeléctrico, esta señal es amplificada y transformada a un voltaje de salida. La figura
2.7 muestra la asignación de las terminales en el conector.
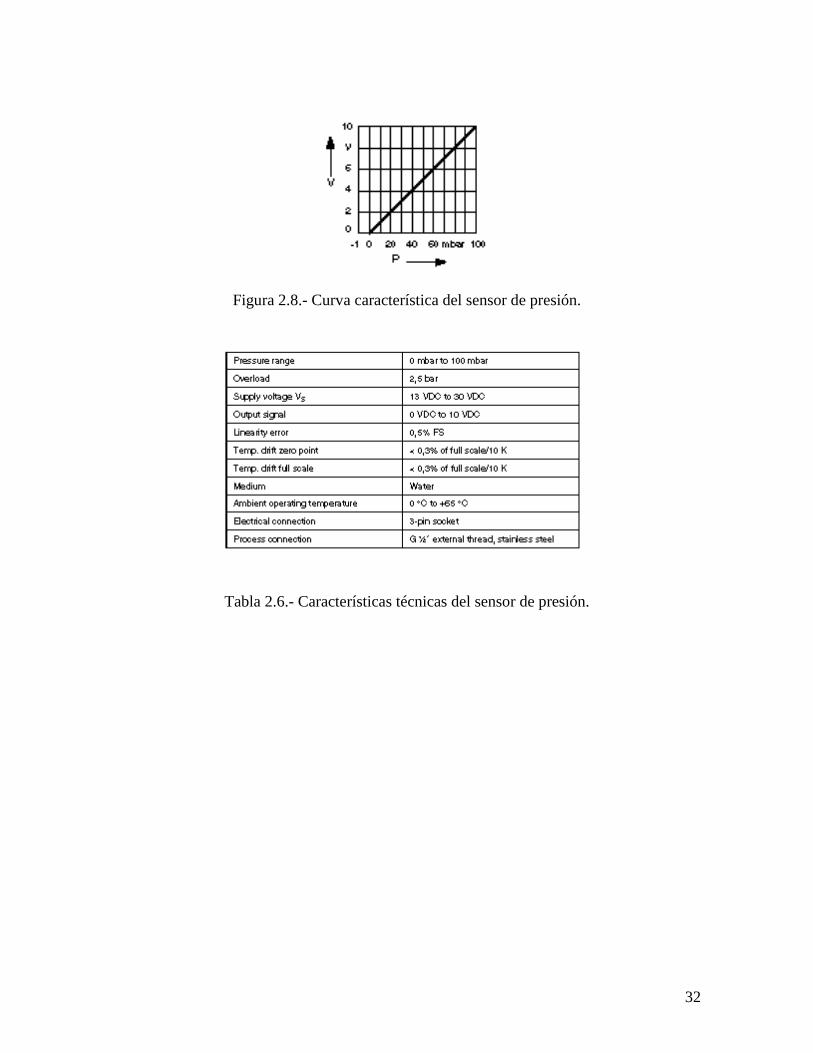
La respuesta de este sensor es totalmente lineal y se muestra su curva característica en la
figura 2.8.
La tabla 2.6 muestra las características técnicas del sensor.
Figura 2.7.- Terminales del sensor de presión.
32
Figura 2.8.- Curva característica del sensor de presión.
Tabla 2.6.- Características técnicas del sensor de presión.
33
IV.- ACTUADORES FINALES
BOMBA ELECTRICA:
La bomba es de tipo centrífugo y se coloca en los módulos de sistemas de control con el
objetivo de recircular agua fría o caliente.
El motor está diseñado para una operación continúa, es decir su velocidad puede tomar
cualquier valor entre apagado y su velocidad máxima. La bomba gira en el sentido de las
manecillas del reloj. Puede ser colocada de manera horizontal o vertical. Si se coloca de
manera vertical el motor eléctrico debe de situarse sobre el cuerpo de la bomba. Por otro
lado si se coloca horizontalmente la salida del fluido debe de ser hacia arriba.
El código de identificación de los cables de alimentación es el siguiente.
La bomba no debe de operarse en seco, con agua de mar o fluidos contaminados; solo agua
destilada.
34
La siguiente tabla muestra los datos técnicos de la bomba.
35
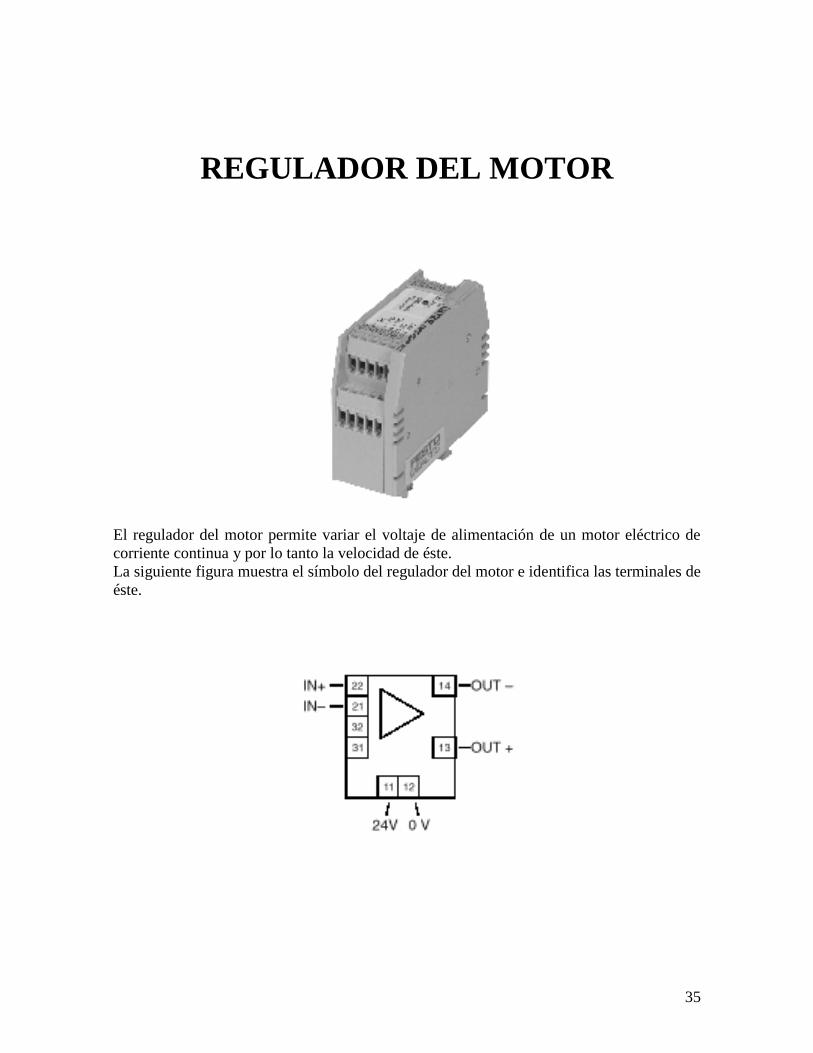
REGULADOR DEL MOTOR
El regulador del motor permite variar el voltaje de alimentación de un motor eléctrico de
corriente continua y por lo tanto la velocidad de éste.
La siguiente figura muestra el símbolo del regulador del motor e identifica las terminales de
éste.
36
La siguiente tabla muestra los datos técnicos del regulador del motor.
37
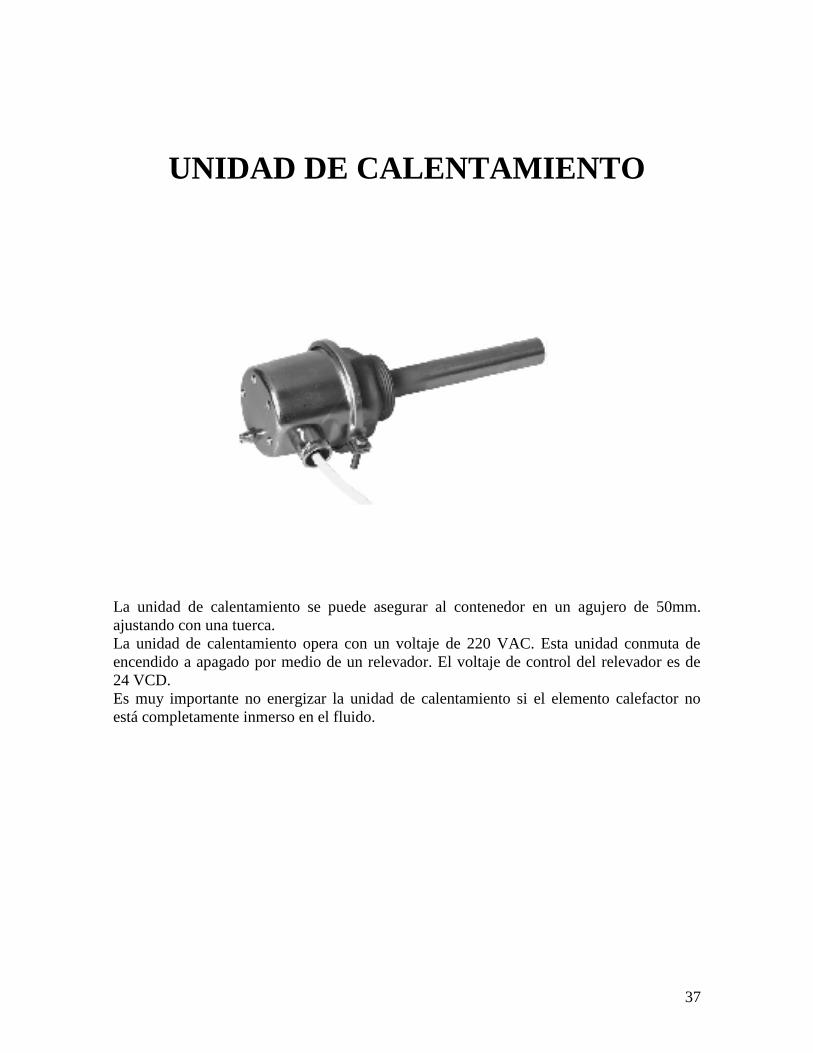
UNIDAD DE CALENTAMIENTO
La unidad de calentamiento se puede asegurar al contenedor en un agujero de 50mm.
ajustando con una tuerca.
La unidad de calentamiento opera con un voltaje de 220 VAC. Esta unidad conmuta de
encendido a apagado por medio de un relevador. El voltaje de control del relevador es de
24 VCD.
Es muy importante no energizar la unidad de calentamiento si el elemento calefactor no
está completamente inmerso en el fluido.
38
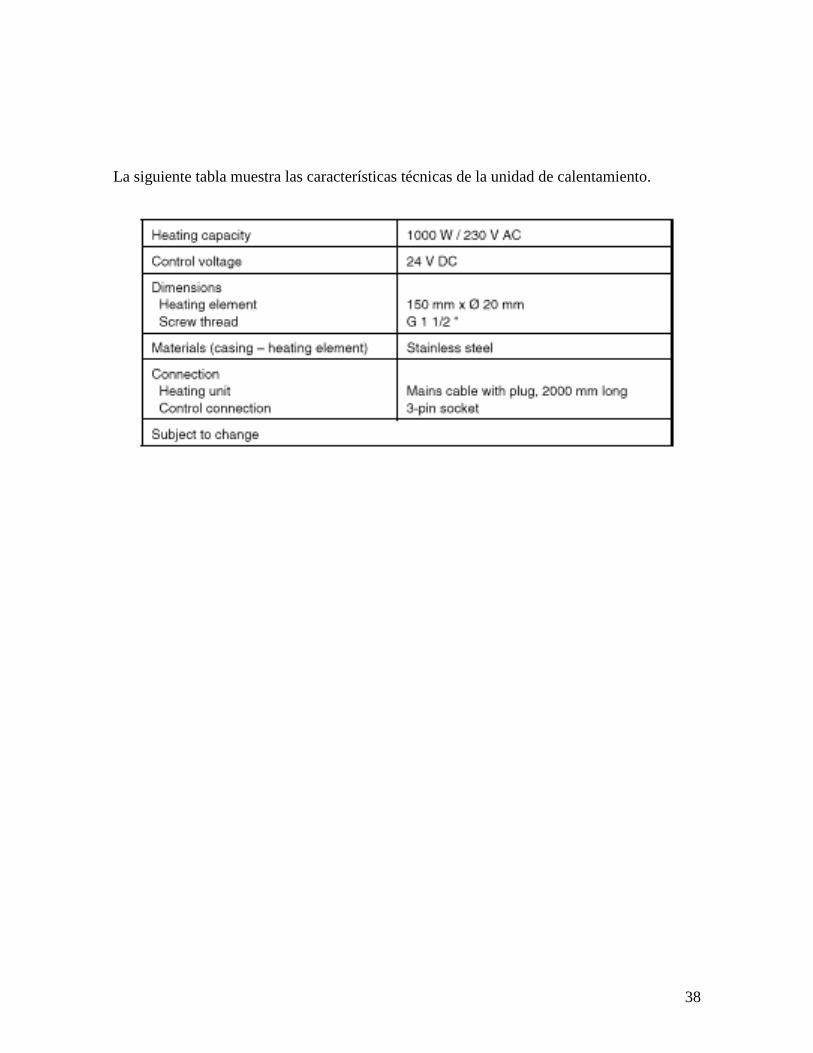
La siguiente tabla muestra las características técnicas de la unidad de calentamiento.
39
VÁLVULA PROPORCIONAL
La válvula proporcional facilita el control del flujo de gases y líquidos neutros, y puede ser
utilizada como elemento final de control en un sistema de control de lazo cerrado.
El obturador puede ser elevado sobre el asiento de la válvula de manera proporcional a la
cantidad de corriente que circula por la bobina del solenoide. Si la válvula es des
energizada ésta se cierra debido a la acción de un resorte interno.
40
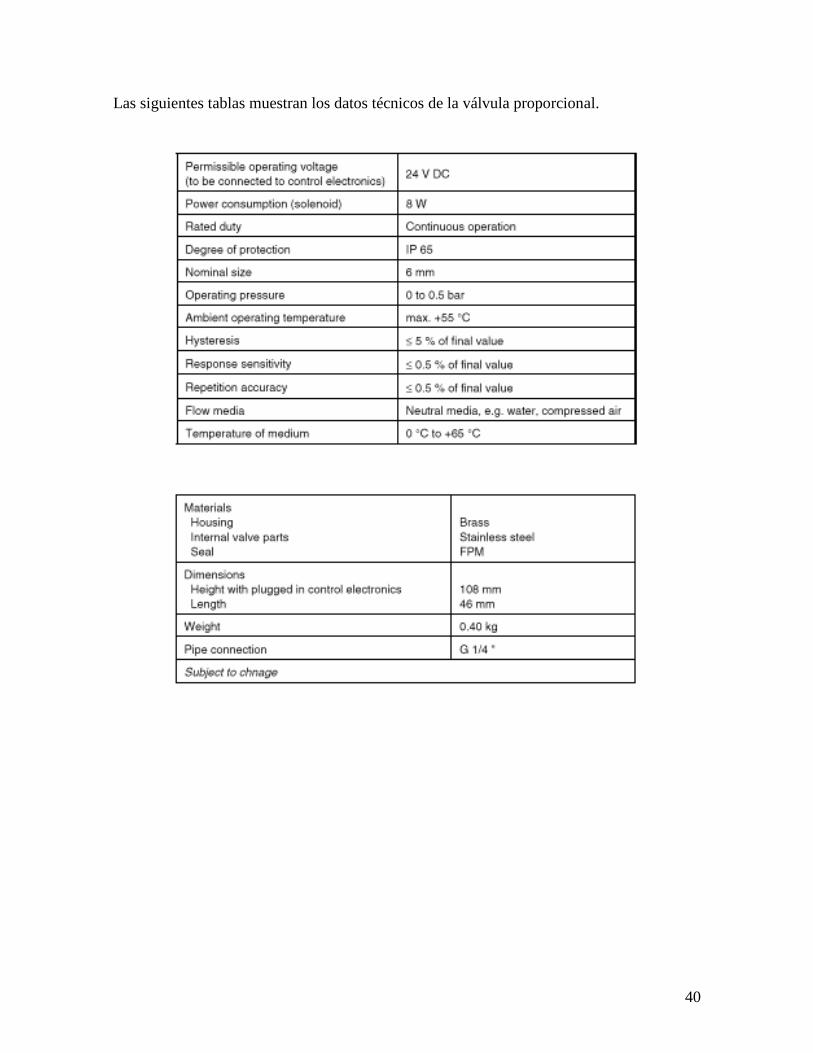
Las siguientes tablas muestran los datos técnicos de la válvula proporcional.
41
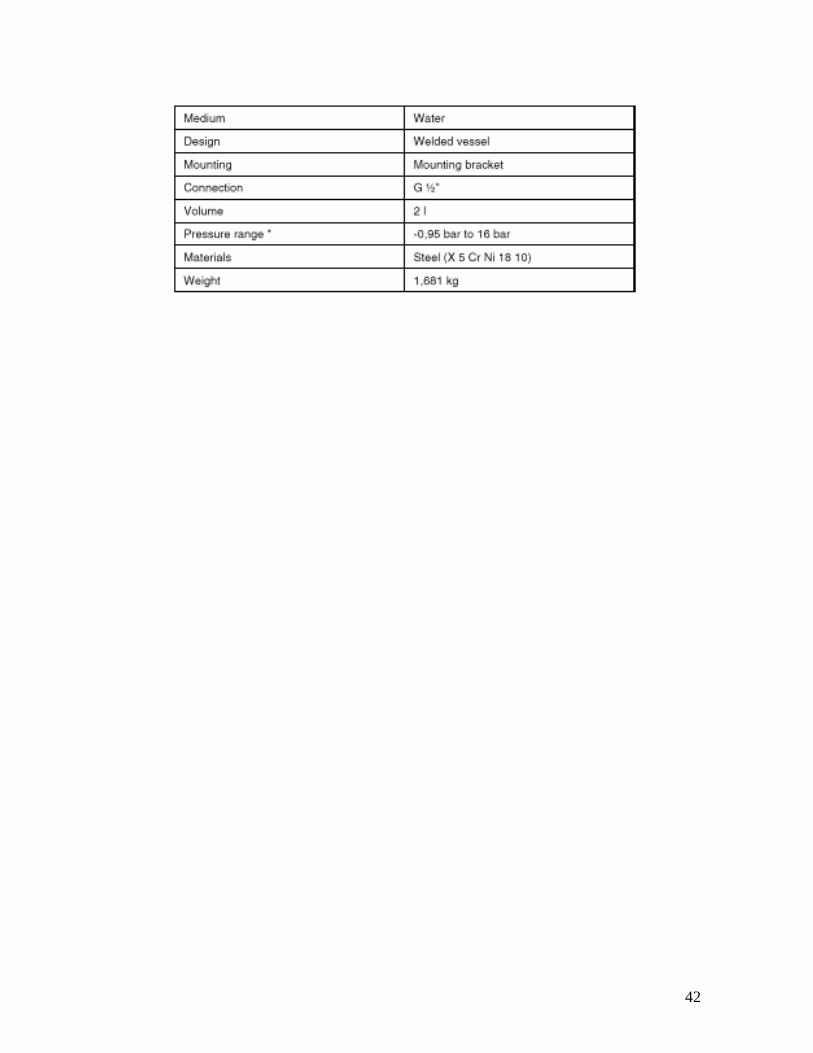
TANQUE PARA PRESION (proceso)
Este elemento no es un actuador final. Es un dispositivo que se añade al proceso para
contener agua a presión dentro de éste.
La siguiente tabla muestra las características técnicas del recipiente.