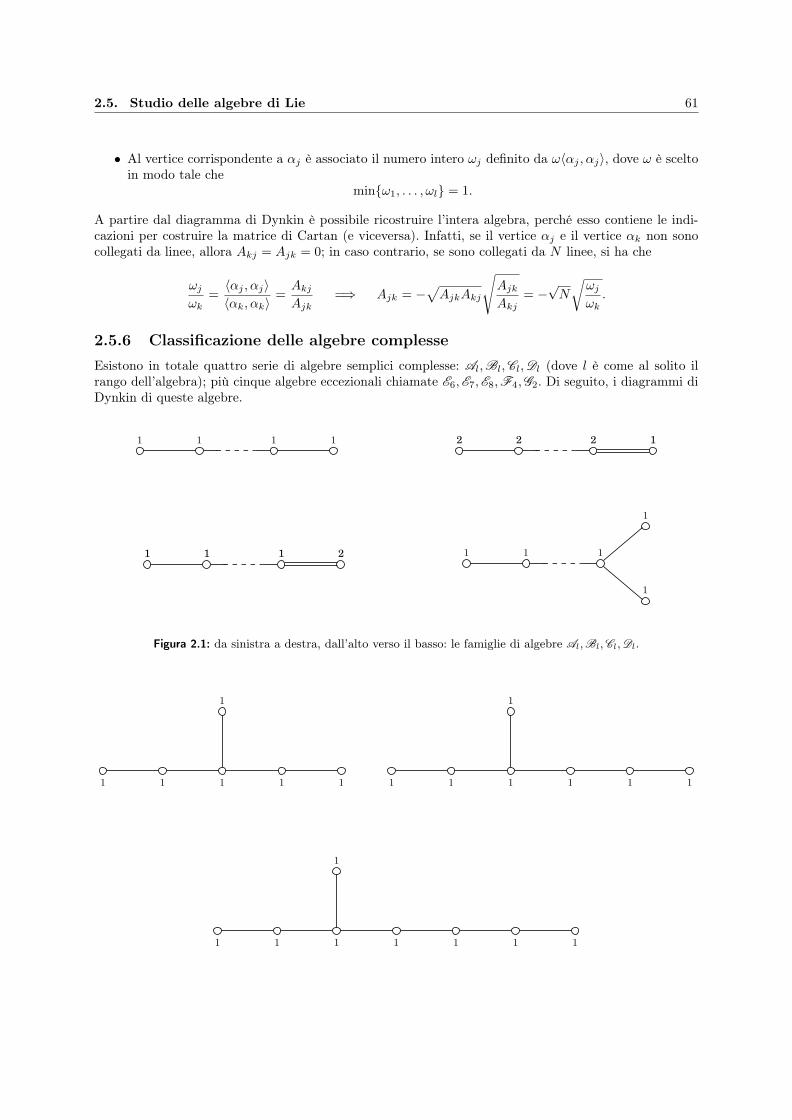
Metodi matematici della fisica Geometria e gruppi a cura di Tommaso Parolini Appunti del corso del prof. Alberto Santambrogio Anno accademico 2012-2013 Dipartimento di Fisica – Università degli Studi di Milano
Transcript
Metodi matematici della fisica
Geometria e gruppi
a cura diTommaso Parolini
Appunti del corso delprof. Alberto Santambrogio
Anno accademico 2012-2013
Dipartimento di Fisica – Università degli Studi di Milano
Dedico queste 100 pagine a Masca-sensei, senza la cui perseveranza non sarei mai diventato adepto di LATEX, esenza i cui preziosi consigli questo documento non esisterebbe nella sua forma presente. ;)
Quest’opera è stata rilasciata con licenza Creative Commons Attribuzione - Condividi allo stesso mo-do 3.0 Italia. Per leggere una copia della licenza visita il sito web http://creativecommons.org/licenses/by-sa/3.0/it/ o spedisci una lettera a Creative Commons, 171 Second Street, Suite 300, San Francisco,California, 94105, USA.Le immagini sono state realizzate in Inkscape 0.48.Realizzato con LATEX.
versione aggiornata al 9 ottobre 2013 (completa – v1.5)
0.1 Notazione matematicaNella scelta della notazione si è cercato di seguire un criterio di coerenza e immediatezza, scegliendodi volta in volta la scrittura più “naturale”; ovviamente, le scelte rispecchiano il criterio di naturalezzaproprio dell’autore, e potrebbero non essere condivise dal lettore. Ciononostante, l’autore confida nellacapacità di quest’ultimo di adattarsi a una simbologia o notazione forse non completamente familiare.Di seguito, vengono riportate alcune delle scelte di notazione per i caratteri più ricorrenti. La notazioneadoperata è del resto spiegata nella maggior parte dei casi in cui possa risultare non immediata (e siascrivano i casi in cui ciò non avviene a un fallo dell’autore).
InsiemiGli insiemi generici, se ciò non causa ambiguità, vengono indicati con lettere maiuscole in carattere italico:A,B.Per gli spazi numerici standard è riservata la consueta simbologia “black board”: R per i reali, C peri complessi, Q per i razionali, Z per gli interi e N per i naturali. Inoltre si indica con H l’insieme deiquaternioni.Gli spazi topologici generici (e in particolare le varietà) vengono indicati con lettere corsive:M,N ,X ,Y.Per i gruppi di Lie, che sono varietà, si usano perlopiù i caratteri corsivi G,G′,H.Per le algebre di Lie si adoperano lettere in carattere gotico (quasi sempre minuscolo): g, g′, h, se si parla dialgebre reali (in particolare delle algebre dei gruppi classici su(n), u(n), so(n), . . .), o caratteri calligraficiL ,L ′ se si parla di algebre complesse (in particolare delle algebre complesse semplici Al,Bl, . . . ,G2). Seperò si vuole porre in risalto che un’algebra è stata ottenuta complessificando un’algebra reale, si userà g(e simboli analoghi); viceversa, la forma reale compatta di un’algebra complessa L sarà indicata da LC
(e il sottospazio di Cartan reale da HR).
Matrici e applicazioniLe matrici sono indicate da lettere maiuscole o minuscole in italico: A,B, a, b. Sono indicate in minuscoloquando è importante far notare che sono elementi di un’algebra di matrici esponenziabile a un gruppodi matrici, cosicché ea = A. Per la matrice identità si adopera la notazione I, talvolta indicando ladimensione: Id, Ip×q. In modo analogo, la matrice nulla è indicata con O (con eventuali pedici per indicarnela dimensione).Per la funzione identità s’è usata la notazione 1, di solito con un pedice per indicare su quale spazioagisca: 1G . Analogamente, la funzione nulla è scritta O (con eventuale pedice).In certi casi, la distinzione tra matrice identità (o nulla) e funzione identità (o nulla) è sfumata. La sceltase indicarla nell’uno o nell’altro modo riflette la sensibilità dell’autore.Spesso, le applicazioni tra due spazi (varietà, gruppi di Lie, ecc.) sono denotate da lettere greche minuscoleo maiuscole. Le lettere ϕ e ψ vengono usate di solito per indicare un generico omomorfismo tra gruppi oalgebre di Lie. Fanno eccezione alcune mappe, come le mappe di moltiplicazione left e right, di aggiunzione,esponenziale e di rappresentazione aggiunta: L,R, I, exp,Ad, ad.I vettori generici sono indicati da lettere minuscole italiche (es. v) quando sono interpretati come entitàastratte o funzionali lineari, o con il grassetto (es. v) quando sono visti come elementi di Rn (o spaziisomorfi). I campi vettoriali sono indicati da lettere maiuscole diritte X,Y,Z.
IndiciPer gli indici vengono quasi sempre riservate le lettere i, j, k, l,m, n, p, q (a seconda della convenienza).Gli indici possono essere posizionati in basso o, quando ciò non possa causare ambiguità, in alto, come inxi.Una coppia di indici uguali, uno in alto e uno in basso, sottindendono una somma se non diversamentespecificato (convenzione di sommatoria), come in ε k
ij Tk :=∑k ε
kij Tk.
Di norma gli indici vengono posizionati in alto nel caso di componenti di un vettore e per potersi serviredella convenzione di sommatoria, come in h = µihi.
Capitolo 1
Cenni di geometria differenziale
In questa sezione viene introdotto il concetto di varietà differenziabile. La nozione di varietà (manifoldin lingua inglese) estende quella di superficie in R3 e la amplia, permettendo di trattare con spazi moltogenerali in modo efficace e versatile. Si richiede che sulla varietà sia definita una struttura geometrica,detta struttura differenziabile, che permetta alle proprietà di regolarità definite per gli oggetti sulla varietàdi mantenersi coerenti a seguito di un cambio di coordinate.Vengono in seguito studiate brevemente le funzioni definite su una varietà e introdotto un concetto didifferenziabilità per tali funzioni, unitamente ai concetti conseguenti di spazio tangente, differenziale espazio cotangente. Da ultimo, vengono definite le mappe di inclusione tra varietà.
1.1 Varietà differenziabili
Per enunciare la definizione di varietà differenziabile, è conveniente definire prima alcuni concetti piùbasilari.
Definizione 1.1.1. Un insiemeM è uno spazio localmente euclideo di dimensione n se:
a) è uno spazio topologico di Hausdorff;
b) ogni punto dell’insieme possiede un intorno omeomorfo a un sottinsieme aperto di Rn.
La proprietà a) richiede allo spazioM di possedere una topologia1 che ne elenchi gli aperti, e inoltre digodere della proprietà di Hausdorff (per ogni coppia di punti distinti dell’insieme devono esistere dueaperti separati contenenti rispettivamente l’uno e l’altro punto).La proprietà b) richiede che, in prossimità di un qualunque punto dello spazio, questo sia confondibilecon Rn (cioè che si “appiattisca” opportunamente quando “guardato abbastanza da vicino”).Più precisamente, si dice omeomorfismo (da non confondere con omomorfismo) tra spazi topologici unafunzione invertibile che sia continua con la sua inversa, vale a dire una funzione invertibile f dallo spazioX allo spazio Y tale che, se l’insieme A ⊂ X è un aperto di X , allora la sua immagine f(A) ⊂ Y è unaperto di Y.Un omeomorfismo φ : U → Rn tra l’aperto U ⊂M e l’aperto φ(U) ⊂ Rn è detto mappa delle coordinate,e le sue componenti
xi := πi ◦ φ (1.1.1)
(dove πi : Rn → R è la proiezione sull’i -esimo asse coordinato) sono dette funzioni coordinate; la dupla(U, φ) è chiamata sistema di coordinate o carta.
Definizione 1.1.2. Una famiglia F = {(Uα, φα)} di carte dell’insiemeM (con φα : Uα ⊂M→ Rn perogni α) è detta un atlante diM di classe Ck se:
1Cioè una collezione di sottoinsiemi di M, comprendente l’insieme vuoto e M stesso, che sia chiusa rispetto a unioninumerabili e intersezioni finite di suoi elementi (Rudin 1987, p. 8).
1.1. Varietà differenziabili 7
a) M =⋃α
Uα;
b) ∀α, β, la funzione di transizione φαβ := φβ ◦ φ−1α è di classe Ck sul proprio dominio φα(Uα ∩ Uβ).
Se la proprietà b) è verificata, si dice che le carte (Uα, φα) e (Uβ , φβ) sono compatibili.Due atlanti si dicono compatibili se la loro unione è un atlante. Si dice che F è un atlante massimale seè un atlante e inoltre se
(U, φ) è una carta diM compatibile con ogni carta di F =⇒ (U, φ) ∈ F .
F è pertanto l’unione di tutti gli atlanti compatibili diM.
Siamo ora pronti per dare la definizione di varietà differenziabile (Warner 1971, p. 6).
Definizione 1.1.3. Se M è uno spazio localmente euclideo n-dimensionale a base numerabile1 e Fè un atlante massimale di M di classe Ck, la dupla (M,F) viene chiamata varietà differenziabile n-dimensionale di classe Ck. L’atlante F è chiamato anche struttura differenziabile.
Una varietà è quindi uno spazio localmente omeomorfo a Rn; il numero n rappresenta la dimensione dellavarietà (si parla di “varietà n-dimensionale” o, brevemente, di “n-varietà”).
Osservazione 1.1.1. Per gli scopi di questo corso sarà sufficiente considerare solo varietà infinitamentelisce (con funzioni di transizione infinitamente derivabili sul loro dominio).
Osservazione 1.1.2. La condizione di massimalità per l’atlante F è puramente tecnica, e può essere divolta in volta data per scontata; infatti, un atlante non massimale può sempre essere reso tale aggiungendoa esso tutte le carte compatibili della varietà.
D’ora in poi il termine “varietà” verrà abitualmente usato in riferimento allo spazioM anziché alla dupla(M,F). Si sottintenderà altresì il termine “differenziabile”.
Esempi
a) L’insieme Rn è una n-varietà. Esso può essere descritto da una sola carta (U, φ), prendendo comeinsieme U lo stesso Rn e come omeomorfismo φ : U → Rn la funzione identità.
b) L’insieme Sn := {x = (x1, . . . , xn+1) |x21 + · · · + x2
n+1 = 1} (sfera unitaria di dimensione n) è unan-varietà. è infatti possibile dotare l’insieme dell’atlante
F = {(U−, φ−), (U+, φ+)},
con
U± := Sn\{(0, . . . , 0,∓1)}
e
φ± : U± → Rn, φ±(x) :=
(x1
1± xn+1, . . . ,
xn1± xn+1
).
è possibile dimotrare che queste funzioni, chiamate mappe di proiezione stereografica, sono compa-tibili (la funzione di transizione tra l’una e l’altra carta è liscia sull’intera n-sfera privata dei polinord e sud).
1Uno spazio topologico è detto a base numerabile o secondo numerabile se esiste un sottoinsieme B (“base”) della suatopologia T tale che ogni elemento di T può essere scritto come unione di elementi di B, e questo è numerabile (Naber 2011,p. 56–7).
8 Capitolo 1. Cenni di geometria differenziale
c) L’insieme RPn delle rette in Rn+1 passanti per l’origine (spazio proiettivo di dimensione n) è unan-varietà. Questo spazio può essere visto come l’insieme Rn+1 quozientato rispetto alla relazioned’equivalenza:
x ∼ y ⇐⇒ x = λy per qualche λ ∈ R.
Denotiamo con [x1, . . . , xn+1] la classe di equivalenza dei vettori multipli di (x1, . . . , xn+1); alloraRPn può essere descritto dalle n+ 1 carte (Ui, φi), dove
Ui := {[x1, . . . , xn+1] ∈ RPn |xi 6= 0}
φi : Ui → Rn, φi([x1, . . . , xn+1]) :=
(x1
xi, . . . ,
xi−1
xi,xi+1
xi, . . . ,
xn+1
xi
),
che sono compatibili (la dimostrazione può essere effettuata per esercizio).
Data la definizione di varietà differenziabile, si possono fare alcune semplici osservazioni:
Osservazione 1.1.3. SeM è una n-varietà e U un suo sottoinsieme aperto, allora anche U è una n-varietà(è sufficiente adattare l’atlante {(Uα, φα)} diM a U considerando le carte (U ∩ Uα, φ
∣∣U∩Uα
);
Osservazione 1.1.4. Se M1 è una n1-varietà e M2 è una n2-varietà, allora il loro prodotto cartesianoM1×M2 è una (n1 +n2)-varietà (è possibile usare le carte (Uα, φα) diM1 e (Vβ , ψβ) diM2 per costruirel’atlante (Uα × Vβ , φα × ψβ) dove φα × ψβ : Uα × Vβ → Rn1 × Rn2).Esempio Lo spazio S1 × S1, prodotto di due 1-sfere, è una 2-varietà chiamata toro.
1.1.1 Funzioni differenziabili sulle varietàPer definire la differenziabilità di una funzione definita su una varietà si ricorre alla sua espressione incoordinate locali.
Diamo prima la definizione nel caso di funzioni a valori reali su una varietà.
Definizione 1.1.4. Sia M una n-varietà e f : U → R una funzione a valori reali definita sull’apertoU ⊂M; si dice che f è differenziabile (di classe Ck) su U se lo è la funzione f ◦ φ−1
α su φα(U ∩ Uα) perogni mappa delle coordinate φα dell’atlante {(Uα, φα)} diM.
Si noti che f ◦ φ−1α è un’ordinaria funzione da Rn in R, e quindi la nozione di differenziabilità è per essa
definita nel modo standard.
Del tutto analoga la definizione per funzioni definite tra varietà.
Definizione 1.1.5. SiaM una m-varietà e N una n-varietà, e sia f :M→N ; si dice che f è differen-ziabile (di classe Ck) suM se lo è la funzione ψβ ◦ f ◦φ−1
α su φα(Uα∩ f−1(Vβ)) per ogni coppia di mappeφα, ψβ (dove si intende che {(Uα, φα)} è un atlante diM e {(Vβ , ψβ)} è un atlante di N ).
Di nuovo, la funzione ψβ ◦f ◦φ−1α è una funzione definita su Rm a valori in Rn, per cui è definito in modo
standard il significato di “differenziabile”.
Infine, diamo il concetto di diffeomorfismo tra due varietà.
Definizione 1.1.6. Se una mappa differenziabile tra varietà f :M→ N è invertibile e l’inversa f−1 èuna mappa differenziabile, si dice che f è un diffeomorfismo tra varietà.
Di seguito, adotteremo anche la dicitura regolare per indicare una funzione differenziabile.
1.2. Vettori tangenti 9
1.2 Vettori tangentiDefinizione 1.2.1. Si indica con F(M) l’insieme delle funzioni regolari sulla varietàM a valori reali.
Definizione 1.2.2. Un vettore tangente alla varietàM nel punto p ∈M è una funzione
v : F(M)→ R
tale che:
a) v(af + bg) = av(f) + bv(g);
b) v(fg) = v(f)g(p) + f(p)v(g) (regola di Leibniz)
per ogni a, b ∈ R e f, g ∈ F(M).
Osservazioni
• Un usuale vettore dello spazio euclideo è pensato come insieme di componenti v = t(v1, . . . , vn) ∈Rn; prendendo come varietàM = Rn, e data una qualunque funzione differenziabile f ∈ F(Rn), sivede che la mappa:
v : f → v · ∇f∣∣p∈ R,
dove p è un qualunque punto di Rn, soddisfa le proprietà a) e b) della definizione 1.2.2, ed è quindiun vettore tangente a Rn nel punto p. Si può dimostrare che questo funzionale fornisce la derivatadirezionale di f lungo la direzione v (moltiplicata per la norma di tale vettore).
• Bisognerebbe specificare che il vettore v agisce non sulla funzione f , ma su un suo germe — cioèsulla classe d’equivalenza delle funzioni coincidenti in un intorno di p. Ciò che conta ai fini delladerivazione, infatti, è solo la variazione locale della funzione, sicché il numero v(f) è uguale per ognifunzione f appartenente alla classe d’equivalenza. Per non appesantire la trattazione, a ogni modo,continueremo a parlare di “funzioni” in luogo dei loro germi.
Definizione 1.2.3. SiaM una varietà e p ∈M; si definisce spazio tangente aM nel punto p, e si denotacon TpM, l’insieme dei vettori tangenti aM in p.
L’insieme TpM può essere dotato della struttura di spazio vettoriale tramite la definizione della sommatra vettori e della moltiplicazione per uno scalare, definite tramite l’azione dei vettori su una funzionearbitraria f ∈ F(M):
(v + w)(f) := v(f) + w(f)
(λv)(f) := λv(f)
dove v, w ∈ TpM e λ ∈ R.Se M è una n-varietà, allora TpM è uno spazio vettoriale di dimensione n. Si può introdurre una basenaturale su tale spazio. Sia infatti U ⊂M un aperto abbinato alla carta (U, φ), e sia p ∈ U ; si definiscanogli n vettori
∂
∂xi
∣∣∣∣p
: F(M)→ R
f 7→ ∂(f ◦ φ−1)
∂ri
∣∣∣∣φ(p)
con le xi definite come in 1.1.1. Possiamo anche scrivere (con abuso di notazione):
∂
∂xi
∣∣∣∣p
(f) :=∂f
∂xi
∣∣∣∣p
.
10 Capitolo 1. Cenni di geometria differenziale
Questi sono evidentemente elementi di TpM; notiamo che la loro azione sulla funzione xj ∈ F(M) è:
∂
∂xi
∣∣∣∣p
(xj) =∂(xj ◦ φ−1)
∂ri
∣∣∣∣φ(p)
=∂rj
∂ri
∣∣∣∣φ(p)
= δji ;
pertanto, dato un qualunque vettore v ∈ TpM, vale la scomposizione:
v = v(xi)∂
∂xi
∣∣∣∣p
=: vi∂
∂xi
∣∣∣∣p
è possibile mostrare che i vettori∂
∂xi
∣∣∣∣p
, oltre a generare TpM, sono anche linearmente indipendenti, e
perciò che costituiscono effettivamente una base. I numeri reali
vi := v(xi) (1.2.1)
rappresentano le componenti del vettore v in tale base.
Definizione 1.2.4. L’insieme1
TM :=⊔p∈M
TpM :=⋃p∈M
{p} × TpM
è detto fibrato tangente diM.
Gli elementi di TM sono in corrispondenza biunivoca con le coppie ordinate (p, v) con p ∈M e v ∈ TpM.
Definizione 1.2.5. La mappa
π : TM→M(p, v) 7→ p
è detta mappa di proiezione canonica.
È possibile equipaggiare TM con una struttura differenziabile in modo da renderlo una varietà didimensione doppia rispetto aM.
1Il simbolo⊔
indica l’unione disgiunta tra insiemi.
1.3. Differenziale di una funzione 11
1.3 Differenziale di una funzioneDefinizione 1.3.1. Sia f :M→N una funzione regolare tra l’m-varietàM e l’n varietà N , sia p ∈M.Si definisce differenziale di f nel punto p la funzione
df : TpM→ Tf(p)N
definita dadf(v) : g 7→ v(g ◦ f)
per ogni v ∈ TpM e g ∈ F(N ).
Osservazione 1.3.1. df è una mappa lineare.
Definizione 1.3.2. Una curva su una varietàM è una mappa regolare
α : I →M,
dove I è un sottoinsieme aperto di R.
Sia data una curva α : (a, b) → M; si dice vettore tangente alla curva nel punto α(t) il vettore α(t) ∈Tα(t)M definito da
α(t) := dα
(d
dr
∣∣∣∣t
), (1.3.1)
la cui azione su una funzione regolare f è data esplicitamente da
α(t)(f) =d
dr
∣∣∣∣t
(f ◦ α).
Qualora la varietàM coincida con Rn, la nozione di vettore tangente si riconduce a quella usuale1:
αi(t) = α(t)(xi) =d(xi ◦ α)
dr
∣∣∣∣t
=dxi
dr
∣∣∣∣t
= xi(t),
avendo indicato con xi(r) l’i-esima componente di α(r) ∈ Rn.
1Si tenga presente la definizione 1.2.1 per le componenti di un vettore.
12 Capitolo 1. Cenni di geometria differenziale
1.4 Campi vettoriali
Definizione 1.4.1. Un campo vettoriale X su una varietàM è una funzione
X : M→ TMp 7→ Xp ∈ Tp(M)
Dato un campo vettoriale X e una funzione regolare f , è naturale considerare la funzione
Xf : M→ Rp 7→ (Xf) (p) := Xp(f)
(1.4.1)
Se l’applicazione Xf ∈ F(M) è regolare per ogni f ∈ F(M), si dice che è regolare il campo X. I campivettoriali regolari possono quindi essere visti come endomorfismi dello spazio F(M),
X : F(M)→ F(M),
associando a qualunque funzione regolare f un’altra funzione regolare Xf . La linearità è immediatamenteverificata, e vale la proprietà di Leibniz:
X(fg) = fXg + gXf.
Definizione 1.4.2. Siano X e Y campi vettoriali regolari; è detta parentesi di Lie di X e Y l’applicazione
[X,Y] : F(M)→ F(M)
f → X(Yf)−Y(Xf),
dove l’azione di [X,Y](f) è da intendersi:
[X,Y](f)(p) := Xp(Yf)−Yp(Xf). (1.4.2)
Osservazione 1.4.1. [X,Y] è un campo vettoriale regolare.
Osservazione 1.4.2. La parentesi di Lie può anche essere pensata secondo la definizione 1.4.1, cioè nelseguente modo:
[X,Y] : M→ TMp 7→ [X,Y]p,
dove l’azione di [X,Y]p è definita da
[X,Y]p(f) := [X,Y](f)(p)
(cfr. (1.4.2)) per ogni f funzione regolare in un intorno di p, e le funzioni Xf e Yf sono definitedall’equazione (1.4.1).
La parentesi di Lie gode delle seguenti proprietà:
a) [X,Y] = −[Y,X];
b) [aX + bY,Z] = a[X,Z] + b[Y,Z];
c) [X, [Y,Z]] + [Y, [Z,X]] + [Z, [X,Y]] = 0.
La proprietà c) è chiamata identità di Jacobi.
Definizione 1.4.3. Sia V uno spazio vettoriale e [, ] : V ×V → V un’applicazione che goda delle proprietàa), b) e c). Allora (V, [, ]) è un’algebra di Lie.
1.4. Campi vettoriali 13
Pertanto, lo spazio vettoriale dei campi vettoriali regolari, munito dell’operazione parentesi di Lie, èun’algebra di Lie.Un campo vettoriale genera in modo naturale un flusso sulla varietà sulla quale è definito.
Definizione 1.4.4. Sia X un campo vettoriale regolare sulla varietàM, e sia α : (a, b)→M una curvasu tale varietà. Si dice che α è una curva integrale di X se
α(t) = Xα(t). (1.4.3)
Risulta di notevole importanza stabilire sotto quali condizioni esistano curve integrali di un dato campovettoriale.Una prima risposta è fornita dal seguente
Teorema 1.4.1. Sia X un campo vettoriale regolare sulla varietà M e sia p ∈ M. Allora esistono, esono unici, un intervallo aperto I = (a, b) ⊂ R, non necessariamente limitato e contenente lo 0, e uncurva αp : I →M tali che:
a) αp(0) = p;
b) αp è una curva integrale di X;
c) se β : (c, d) ⊂ R→M soddisfa a) e b), allora (c, d) ⊂ (a, b) e β = α∣∣(c,d)
.
Osservazione 1.4.3. La c) dice che la curva αp è definita sull’intervallo più esteso possibile, garantendol’unicità.
Possiamo ora definire una funzione che faccia “scorrere i punti diM lungo le curve integrali”.
Definizione 1.4.5. Viene chiamato flusso del campo vettoriale regolare X la funzione
Φt : Ut →MΦt(p) := αp(t)
(1.4.4)
definita sull’insieme Ut = {p ∈M| t ∈ (a(p), b(p))}.
Tralasciando le problematiche legate al dominio, questa funzione gode delle seguenti proprietà:
a) Φ0 = 1;
b) Φs ◦ Φt = Φs+t;
c) Φt è un diffeomorfismo per ogni t, e Φ−1t = Φ−t.
Su ipotesi di regolarità del dominio, infatti, si ha
p = αp(0)Φt7−→ αp(t)
Φs7−→ ααp(t)(s);
il punto ααp(t)(s) giace sulla curva integrale passante per αp(t), naturalmente. Ma anche la mappa s 7→αp(t+ s) è una curva integrale passante per lo stesso punto (questo si verifica immediatamente ponendos = 0). Il teorema di unicità 1.4.1 garantisce che queste mappe sono la stessa, cioè che ααp(t)(s) = αp(s+t),cioè la proprietà b). La proprietà a) è banale, mentre la c) è conseguenza di b).
Definizione 1.4.6. Se il dominio della curva integrale αp(t) coincide con R per ogni p ∈ M, il campovettoriale X è detto completo.
Un campo vettoriale completo genera una famiglia di flussi {Φt} che gode della struttura di gruppo, edè perciò chiamata gruppo a un parametro di trasformazioni suM.
14 Capitolo 1. Cenni di geometria differenziale
1.5 Mappe di inclusioneCi interessa dare alcune definizioni su come è possibile includere una varietà all’interno di un’altra.Esistono diverse nozioni di inclusione, a seconda della regolarità che si richiede alla funzione che larealizza.
Definizione 1.5.1. Sia f : M → N una funzione differenziabile tra una m-varietà M e una n-varietàN . f è detta immersione se il suo differenziale dfp è non singolare per ogni p ∈M.
Definizione 1.5.2. Sia f : M → N un’immersione. Se f è una funzione iniettiva (anche detta uno auno), allora (M, f) è detta sottovarietà (o submanifold).
Definizione 1.5.3. Sia f : M→ N un’immersione iniettiva. Se f è inoltre un omeomorfismo tra M ef(M), allora è detta embedding (o imbedding).
Per comprendere meglio la differenza tra le definizioni, pensiamo di voler applicare l’insieme R all’inter-no del piano. La più generale immersione sarà una curva regolare qualsiasi, con una parametrizzazioneadeguata che permetta di percorrerla al variare del parametro su tutto R.
Affinché la curva sia anche una sottovarietà è però necessario richiedere l’iniettività: non possono cioèverificarsi intersezioni o sovrapposizioni di tratti di curva.
Persino questa specificazione non previene però da situazioni patologiche: una curva in cui un estremo siavvicina asintoticamente a un altro punto appartenente alla curva per il valore del parametro tendenteall’infinito è sì descritta da una funzione iniettiva, ma non è omeomorfa a R (a causa della presenza del“cappio”).
Se però richiediamo che la funzione d’inclusione sia un embedding, allora la curva risultante avrà effetti-vamente la medesima topologia di R.
Capitolo 2
Gruppi di Lie
2.1 Definizione ed esempiIn fisica, molte proprietà di simmetria possono essere descritte in modo efficiente adoperando la teoriadei gruppi di Lie. Questi sono varietà differenziabili che posseggono inoltre la struttura algebrica digruppo. Pur essendo i gruppi di Lie in generale oggetti complicati, molte loro proprietà possono essereindagate effettuando un’“approssimazione lineare” che sfrutta una notevole proprietà di una particolareclasse di campi vettoriali, detti left-invarianti. In questo modo, a ogni gruppo di Lie risulta naturalmenteassociata un’algebra di Lie (definizione 1.4.3), le cui proprietà di linearità permettono di semplificareenormememente lo studio del gruppo, pur preservando la maggior parte delle proprietà del gruppo che sista studiando.
Definizione 2.1.1. Sia G una varietà differenziabile. G è un gruppo di Lie se:
a) G è un gruppo1;
b) l’operazione di gruppo ∗ è una funzione regolare;
c) la mappa inversa g 7→ g−1 è regolare ∀g ∈ G.
Esempi
• (Rn,+), dove + è l’ordinaria somma tra vettori, è un (banale) gruppo di Lie; lo stesso vale per(R\{0}, ·) (con l’abituale prodotto tra reali);
• (Cn,+) e (C\{0}, ·), a patto di considerare Cn una 2n-varietà reale (piuttosto che una n-varietàcomplessa, della quale non è stata data la definizione e di cui non si tratta in questo corso), sonoallo stesso modo gruppi di Lie;
• La 1-sfera unitaria S1 = {eiϑ, ϑ ∈ R}, assieme alla moltiplicazione complessa mutuata da C\{0}, èun gruppo di Lie;
• S1 × S1 (toro) è un gruppo di Lie con l’operazione di moltiplicazione componente per componentemutuata da S1. Si veda la seguente osservazione per maggiore chiarezza.
Osservazione 2.1.1. Se (G, ∗G) e (H, ∗H) sono due gruppi di Lie, allora anche il loro prodotto cartesianoG ×H, unitamente all’operazione di gruppo ∗ definita da
è a sua volta un gruppo di Lie.1Cioè esiste un’operazione ∗ : G×G → G rispetto a cui G è chiuso, la quale è associativa: g∗(h∗k) = (h∗g)∗k ∀g, h, k ∈ G;
ed esiste un elemento e ∈ G, chiamato identità, tale che e∗g = g ∗e = g ∀g ∈ G; e inoltre, a ogni elemento g ∈ G è associatoun elemento g−1 ∈ G, detto inverso di g, tale che g ∗ g−1 = g−1 ∗ g = e. Allora, si dice che la dupla (G, ∗) è un gruppo.
16 Capitolo 2. Gruppi di Lie
Spazio delle matrici invertibili come gruppo di Lie
Diamo inizio al paragrafo osservando che lo spazio delle matrici n× n a elementi reali Mn(R) può esseremetrizzato in modo naturale interpretando il suo generico elemento A come un punto dello spazio euclideoRn2
. Definendo infatti la funzione distanza
d(A,B) : Mn(R)×Mn(R) 7→ R
d(A,B) :=(∑i,j
|Aij −Bij |2)1/2
,
si osserva facilmente che (Mn(R), d) è uno spazio metrico completo. È immediato constatare che Mn(R),con questa topologia indotta da Rn2
, è una varietà differenziabile.È inoltre facile osservare che il sottoinsieme di Mn(R) costituito dalle matrici non singolari, detto gruppolineare generale:
GLn(R) := {A ∈ Mn(R)|detA 6= 0},
assieme alla moltiplicazione tra matrici definita nel modo usuale (riga per colonna), è un gruppo (nonabeliano1).La mappa determinante
det : Mn(R)→ R
è ovviamente regolare (essendo un polinomio di grado n). Dato che
GLn(R) = (det)−1(R\{0}),
ed essendo R\{0} un insieme aperto, allora anche GLn(R) è un aperto2; per l’osservazione 1.1.3, dunque,lo stesso GLn(R) è una varietà.Notiamo che le operazioni di prodotto matriciale
(A,B) 7→ AB = C, Cij =∑k
AikBkj
e di matrice inversa3
A 7→ A−1, (A−1)ij = (detA)−1(cof A)ji,
essendo operazioni polinomiali, sono regolari.Il gruppo lineare generale è pertanto un gruppo di Lie.
1Un gruppo è detto abeliano se l’operazione di gruppo è commutativa.2Le controimmagini di insiemi aperti tramite funzioni continue sono anch’essi aperti.3Nella seguente equazione, cof A indica la matrice dei cofattori (o dei complementi algebrici) di A, i cui elementi sono:
(cof A)ij := (−1)i+j(min A)ij , dove (min A)ij è il determinante della matrice quadrata ottenuta rimuovendo da A l’i-esimariga e la j-esima colonna.
2.2. Campi left-invarianti e algebre di Lie associate 17
2.2 Campi left-invarianti e algebre di Lie associateSia (G, ·) un gruppo di Lie; definiamo le mappe G → G
Lg : g′ 7→ gg′ (traslazione left)
Rg : g′ 7→ g′g (traslazione right),
per ogni g ∈ G. Questi sono diffeomorfismi, essendo regolari ed essendo il loro inverso dato da L−1g = Lg−1
(e similmente per R). Scegliamo di concentrare l’attenzione sulla mappa L (non farebbe alcuna differenzascegliere invece R).
Definizione 2.2.1. Sia X : G → TG un campo vettoriale. X è detto left-invariante se
dLg(X) = X ◦ Lg ∀g ∈ G.
Questo vuol dire che si ottiene lo stesso risultato valutando prima il campo in un punto g′ ∈ G e poispostando il vettore tramite dLg, o prima spostandosi da g′ a gg′ (tramite Lg) e poi valutando il campo.In formule, possiamo scrivere questa constatazione nella forma
Xgg′ = dLg(Xg′) ∀g, g′ ∈ G. (2.2.1)
Notiamo che la formula 2.2.1 implica che il campo left-invariante X è completamente determinato dal suovalore nel punto identità e di G. Infatti, prendiamo g′ = e; allora si vede che
Xg = dLg(Xe),
il che definisce il valore del campo in qualunque punto g ∈ G semplicemente “trasportando” il vettore Xe
tramite la mappa di traslazione L.In effetti, esiste una vera e propria corrispondenza biunivoca tra i campi left-invarianti definiti su G e ivettori tangenti al punto e, come verrà stabilito tra poche righe.Prima di enunciare tale risultato, tuttavia, è possibile compiere alcune osservazioni. Denotiamo con Ll’insieme dei campi left-invarianti su G.Osservazione 2.2.1. L è uno spazio vettoriale; in virtù delle proprietà di linearità dei campi vettoriali,infatti, segue immediatamente che la combinazione lineare di due campi left-invarianti è anch’essa uncampo left-invariante.
Osservazione 2.2.2. I campi appartenenti a L sono necessariamente regolari.
Enunciamo ora il fondamentale teorema cui si accennava in precedenza, cominciando con un lemma.
Lemma 2.2.1. Siano f :M→N e g : N → P funzioni regolari tra varietà. Allora
d(g ◦ f) = dg ◦ df.
Dimostrazione. Osserviamo innanzitutto che, come da definizione,
d(g ◦ f)p : Tp(M)→ T(g◦f)(p)(P).
Applichiamo questo differenziale a un generico vettore v ∈ Tp(M), ottenendo così un funzionale inT(g◦f)(p)(P), e consideriamo una funzione regolare ψ ∈ F(P); per definizione, l’azione del differenzialesopra scritto su tale funzione è
e dato che (ψ ◦ g) ◦ f = ψ ◦ (g ◦ f) si ottiene la tesi.
Teorema 2.2.2. La mappa X 7→ Xe è un isomorfismo tra gli spazi vettoriali L e Te(G).
18 Capitolo 2. Gruppi di Lie
Dimostrazione. La linearità della mappa si deduce dal fatto che i campi vettoriali valutati in un punto sonofunzioni lineari. Proviamo dapprima l’iniettività. Supponiamo che X e Y siano due campi left-invariantie coincidenti nel punto e; allora, sfruttando la left-invarianza:
Xg = dLg(Xe) = dLg(Ye) = Yg ∀g ∈ G,
cioè X = Y. Dimostriamo ora che la mappa è suriettiva. Consideriamo un vettore qualunque v ∈ Te(G);definiamo il campo vettoriale Xv dato da
Xvg := dLg(v) ∀g ∈ G; (2.2.2)
il valore di questo campo nell’identità è1
Xve = dLe(v) = d(1)(v) = v,
cosicché v è in effetti l’immagine della mappa Xv 7→ Xve ; il campo è inoltre left-invariante in quanto
(dove s’è fatto uso del lemma 2.2.1), il che conclude la dimostrazione.
Il seguente teorema afferma che lo spazio L può essere dotato della struttura di algebra di Lie (vedidefinizione 1.4.3).
Teorema 2.2.3. Se X e Y sono campi left-invarianti, allora anche la loro parentesi di Lie [X,Y], definitacome in 1.4.2, è left-invariante.
Dimostrazione. Per ipotesi, X,Y ∈ L; dobbiamo mostrare che [X,Y] ∈ L, vale a dire che
dLg([X,Y]g′) = [X,Y]gg′ ∀g, g′ ∈ G.
Applicando ripetutamente la definizione 1.3.1 di differenziale e la proprietà 2.2.1 di left-invarianza deicampi, otteniamo la seguente catena di uguaglianze (dove f è una qualunque funzione regolare G → R):
L è detta algebra di Lie associata al gruppo di Lie G. Il teorema 2.2.2, d’altra parte, garantisce che talespazio è isomorfo a Te(G); tramite detto isomorfismo, è possibile dotare in maniera naturale della strutturadi algebra di Lie lo stesso Te(G). Questo viene ottenuto definendo la parentesi di Lie sullo spazio tangente:
dove Xu e Xv sono definiti dalla 2.2.2. In pratica, passiamo dai vettori u, v definiti sullo spazio tangenteai campi vettoriali Xu,Xv a essi associati via isomorfismo, e di cui sappiamo effettuare la parentesi di Lie;quindi, passiamo nuovamente allo spazio tangente valutando il campo vettoriale così ottenuto nel puntoe.
1Il differenziale della funzione identità 1 è a sua volta l’identità.
2.2. Campi left-invarianti e algebre di Lie associate 19
Esempi
• Come abbiamo già constatato, (R,+) è un gruppo di Lie. Cerchiamo i suoi campi left-invarianti. Ilpiù generale campo vettoriale definito su R è della forma:
Xt = λ(t)d
dr
∣∣∣∣t
;
la richiesta di left-invarianza si scriveXt = dLt(X0),
le derivate sono chiaramente uguali per ogni t, per cui, in definitiva:
λ(t) = λ(0),
e questo deve valere ∀t. X è pertanto left-invariante se e solo se
Xt = λd
dr
∣∣∣∣t
, λ ∈ R.
Le parentesi di Lie sono triviali:[λ1
d
dr
∣∣∣∣t
, λ2d
dr
∣∣∣∣t
]= λ1λ2
[d
dr
∣∣∣∣t
,d
dr
∣∣∣∣t
]= 0;
questo caratterizza l’algebra di Lie su (R,+) come abeliana, la più semplice possibile.
2.2.1 Algebra associata al gruppo lineare generale delle matrici
Come abbiamo visto nel paragrafo 2.1, (GLn(R), ·) è un gruppo di Lie; ci interessa studiare l’algebra di Liegln(R) a esso associata. Il teorema d’isomorfismo assicura che1 gln(R) ∼ Te(GLn(R)). L’insieme GLn(R)è un aperto in Mn(R), per cui e è interno a GLn(R): questo implica che Te(GLn(R)) = Te(Mn(R)), datoche la definizione di spazio tangente a un punto dipende esclusivamente dai valori assunti dalle funzioniin un intorno del punto (e questo è comune a GLn(R) e Mn(R)).
Apriamo una parentesi generale sugli spazi vettoriali per una constatazione che useremo a breve.Consideriamo uno spazio vettoriale n-dimensionale V sul campo reale; fissata una sua base {e1, . . . , en},chiamiamo {e1, . . . , en} la sua base duale, definita da ei(ej) := δij . Notiamo che {(V, φ)}, dove
φ : V → Rn
viei 7→ (v1, . . . , vn),
è in effetti un atlante per lo spazio V , con le ei che svolgono il ruolo di funzioni coordinate (globali), inquanto
ei(v) = vi = (ri ◦ φ)(v)
(con la definizione 1.1.1). Pertanto, ogni spazio vettoriale è automaticamente una varietà.
1Indichiamo con ∼ un isomorfismo tra due spazi (a priori, spazi vettoriali; ma possibilmente anche algebre).
20 Capitolo 2. Gruppi di Lie
Lo spazio tangente a uno spazio vettoriale può essere identificato con lo spazio stesso. Il generico funzionalesu Tv(V ) (per qualche v ∈ V ) si scrive infatti:
a = ai∂
∂ei
∣∣∣∣v
,
e a questo corrisponde tramite isomorfismo (teorema di Riesz) il vettore aiei ∈ V di componenti ai = ai.Si ha pertanto Tv(V ) ∼ V ∀v ∈ V .
Applichiamo queste considerazioni al caso in questione. Lo spazio Mn(R) (a differenza di GLn(R)) è unospazio vettoriale, perciò Te(Mn(R)) ∼ Mn(R). Possiamo riassumere la catena di isomorfismi in
gln(R) ∼ Mn(R).
Questo è a priori un isomorfismo di spazi vettoriali, cosicché nulla ci assicura che la struttura di algebradi Lie sia preservata nel passaggio dall’algebra gln(R) allo spazio Mn(R); in realtà, lo spazio Mn(R) puòessere strutturato come algebra di Lie definendo su di esso l’operazione:
[A,B] := AB −BA ∀A,B ∈ Mn(R)
(commutatore tra A e B), che si verifica essere una parentesi di Lie.Bisogna mostrare che l’isomorfismo sopra stabilito preserva le parentesi di Lie; fissiamo prima di tutto lanotazione, scrivendo:
gln(R) ∼ Te(GLn(R)) = Te(Mn(R)) ∼ Mn(R)
X 7→ Xe v 7→ α(v),
con (α(v))ij := v(xij) (cioè α(v) è la matrice che ha le stesse componenti del vettore v, visto comefunzionale su Rn2
– le cui n2 funzioni coordinate sono xij).Va dimostrato che, dato l’isomorfismo
β : X 7→ α(Xe),
vale la proprietàβ([X,Y]) = [β(X), β(Y)] ∀X,Y ∈ gln(R).
Dimostrazione. Passiamo alle componenti. Si ha, per definizione (rispettivamente) di β, α e di parentesidi Lie:
Osserviamo che il valore della funzione Y(xij) nel punto A ∈ GLn(R) è (per la left-invarianza di Y)
YA(xij) = dLA(Ye)(xij) = Ye(xij ◦ LA);
la funzione xij ◦ LA è caratterizzata dall’azione
GLn(R)→ RB 7→ (AB)ij ,
con (AB)ij =∑k AikBkj =
∑k xik(A)xkj(B) (per definizione di funzione coordinata xij). Possiamo ora
applicare il vettore Ye a questa funzione e scriverne l’azione implicitamente “nascondendo” B nel seguentemodo (ricordando la linearità di Ye):
YA(xij) = Ye(xij ◦ LA) =∑k
xik(A)Ye(xkj) =∑k
xik(A) (α(Ye))kj =∑k
xik(A) (β(Y))kj .
Si ha pertanto (“nascondendo” anche A) che
Xe(Y(xij)) =∑k
Xe(xik) (β(Y))kj =∑k
(α(Xe))ik (β(Y))kj =∑k
(β(X))ik (β(Y))kj .
2.2. Campi left-invarianti e algebre di Lie associate 21
Poiché un analogo conto vale ovviamente per Ye(X(xij)), e per la linearità dei campi, possiamo concludereche:
(β([X,Y]))ij =
= Xe(Y(xij))−Ye(X(xij)) =∑k
{(β(X))ik (β(Y))kj − (β(Y))ik (β(X))kj
}=
=([β(X), β(Y)]
)ij.
Questo dimostra che gln(R) coincide (via isomorfismo) con Mn(R), con il commutatore tra matrici asvolgere il ruolo di parentesi di Lie sullo spazio.
Osservazione 2.2.3. Quanto visto per le matrici può essere pensato equivalentemente in termini dioperatori lineari agenti su uno spazio vettoriale V di dimensione n. In quest’ottica1
Lo spazio degli automorfismi2 Aut(V ), assieme alla composizione di funzioni ◦, è un gruppo di Lie(isomorfo a GLn(R)); la sua algebra di Lie è End(V ) (isomorfo a Mn(R)).
Osservazione 2.2.4. Possiamo estendere le considerazioni fatte su GLn(R) a GLn(C); in questo modo,l’algebra di Lie del gruppo è (isomorfa a) Mn(C); occorre però tener presente che questi gruppi di Lie(e le corrispettive algebre di Lie) sono pensati come spazi reali (di dimensione 2n2), piuttosto che comespazi complessi di dimensione n2.
1Si denota con End(V ) lo spazio vettoriale n2-dimensionale degli endomorfismi di V ; un endomorfismo di V èun’applicazione lineare da V in se stesso.
2Un automorfismo è un endomorfismo invertibile.
22 Capitolo 2. Gruppi di Lie
2.3 Sottogruppi e sottoalgebre di Lie
2.3.1 Morfismi di gruppi e algebre di LiePer prima cosa, è necessario definire con precisione i morfismi tra gruppi di Lie e tra algebre di Lie, dicui si è già fatto menzione in precedenza.Cominciamo dalle definizione dei morfismi tra gruppi di Lie.
Definizione 2.3.1. Una mappa tra gruppi di Lie ϕ : G → H è detta omomorfismo di gruppi di Lie se èuna mappa regolare e anche un omomorfismo tra gruppi (in senso algebrico1) .Se ϕ è inoltre un diffeomorfismo2, essa è detta isomorfismo di gruppi di Lie.Se G = H, essa è detta automorfismo di gruppi di Lie.
Diamo l’importante definizione di rappresentazione di un gruppo di Lie.
Definizione 2.3.2. Se ϕ è un omomorfismo tra i gruppi di Lie G e H, e se H = Aut(V ) (V spaziovettoriale), o equivalentemente seH = GLn(R) oppureH = GLn(C), allora ϕ è chiamata rappresentazionedel gruppo G.
Analoghe definizioni valgono per i morfismi tra algebre di Lie.
Definizione 2.3.3. Una mappa tra algebre di Lie ψ : g → h è detta omomorfismo di algebre di Liese è un’applicazione lineare e se preserva l’operazione di parentesi di Lie, ossia se [ψ(g1), ψ(g2)]h =ψ([g1, g2]g) ∀g1, g2 ∈ g.Se ψ è inoltre una biiezione, essa è detta isomorfismo di algebre di Lie.Se g = h, essa è detta automorfismo di algebre di Lie.
Analoga anche la definizione di rappresentazione dell’algebra.
Definizione 2.3.4. Se ψ è un omomorfismo tra le algebre di Lie g e h, e se h = End(V ) (V spaziovettoriale), o equivalentemente se h = gln(R) ovvero h = gln(C), allora ψ è chiamata rappresentazionedell’algebra g.
Una rappresentazione di un gruppo induce in modo naturale una rappresentazione dell’algebra a essoassociata. Vale infatti il seguente
Teorema 2.3.1. Se ϕ : G → H è un omomorfismo di gruppi di Lie, allora dϕeè un omomorfismo tra lealgebre di Lie g e h.
Dimostrazione. Sia X un campo vettoriale left-invariante su G; per il teorema 2.2.2, si ha che Xe ∈ Te(G)in modo biunivoco. Sia dϕ(X) l’unico campo left-invariante suH tale che3 dϕ(X)e′ = dϕ(Xe), e chiamiamoper brevità X := dϕ(X); in questo modo Xe′ = dϕ(Xe).Vale la proprietà
Xϕ(g) = dϕ(Xg) ∀g ∈ G;
infatti, sfruttando la left-invarianza e il lemma 2.2.1, si ha
1Un omomorfismo tra due gruppi (algebrici) (G,+) e (H, ∗) è un’applicazione lineare f : G→ H che preserva l’operazionedi gruppo, ossia tale che f(g1) ∗ f(g2) = f(g1 + g2) ∀g1, g2 ∈ G.
2Con ciò si intende che ϕ ammette inversa regolare.3Indichiamo con e l’elemento identità di G, e con e′ quello di H.
2.3. Sottogruppi e sottoalgebre di Lie 23
La proprietà appena dimostrata può essere scritta nella forma:
X ◦ ϕ = dϕ ◦X;
ricordiamo che dobbiamo dimostrare che1
[X,Y] := dϕ([X,Y]) = [dϕ(X),dϕ(Y)] =: [X, Y].
Procediamo con la dimostrazione avvalendoci della proprietà sopra dimostrata (qui f è una qualunquefunzione regolare sul gruppo G):
Nella penultima eguaglianza si è utilizzato il fatto che, essendo ϕ un omomorfismo, vale ϕ(e) = e′.Abbiamo dunque dimostrato che immagine della parentesi [X,Y]e mediante la mappa ϕ coincide con laparentesi delle immagini [X, Y]e′ , ossia che ϕ preserva le parentesi di Lie tra le algebre.
Osserveremo in seguito che, benché il teorema garantisca che a partire da ogni isomorfismo di gruppi puòessere trovato un corrispettivo isomorfismo di algebre, non è vero il contrario.
2.3.2 Sottogruppi e sottoalgebre di Lie
Definizione 2.3.5. Sia G un gruppo di Lie. La dupla (H, ϕ) è detta sottogruppo di Lie di G se:
a) H è un gruppo di Lie;
b) (H, ϕ) è una sottovarietà di G;
c) ϕ è un omomorfismo di gruppi di Lie.
Se vale inoltre la proprietà
d) ϕ(H) è un sottoinsieme chiuso di G,
si dice che (H, ϕ) è un sottogruppo chiuso di G.
I sottogruppi di Lie possono essere individuati cercando i sottogruppi in senso algebrico2 del gruppo diLie. Questo viene mostrato dal seguente
Teorema 2.3.2. Sia H un sottoinsieme chiuso e un sottogruppo (algebrico) di G. Allora H è anche unasottovarietà e (quindi) un sottogruppo di Lie di G.
Sottogruppi “classici”
In forza del teorema appena enunciato, individuiamo immediatamente una serie di sottogruppi di granderilevanza.
• SLn(R) := {A ∈ GLn(R)|detA = 1}, il gruppo lineare speciale, è un sottogruppo di Lie di GLn(R);infatti, esso è un suo sottogruppo algebrico, ed è chiuso in quanto controimmagine, tramite lafunzione regolare “determinante”, del sottoinsieme chiuso3 {1}.
1Si presti attenzione al fatto che usiamo lo stesso simbolo [, ] per denotare le parentesi di Lie definite su g e su h.2 Se G è un gruppo algebrico e H un suo sottoinsieme, H è detto sottogruppo di G se non è vuoto, se è chiuso rispetto
all’operazione di gruppo di G ristretta su H e se contiene l’inverso di ogni suo elemento.3Le controimmagini tramite funzioni continue di insiemi chiusi sono a loro volta insiemi chiusi; si confronti il paragrafo
2.1.
24 Capitolo 2. Gruppi di Lie
• O(n) := {A ∈ GLn(R)|AAT = I}, il gruppo ortogonale, è un sottogruppo di Lie di GLn(R); infatti,la mappa f : A 7→ A−1 −AT da GLn(R)→ Mn(R) è regolare, e
O(n) = f−1({0}).
• In modo analogo sono sottogruppi di Lie (di GLn(R) o di GLn(C)):
U(n) := {A ∈ GLn(C)|AA† = I}, gruppo unitario;
Sp(n) := {A ∈ U(2n)|ATJ = JA−1, J :=(
0n In−In 0n
)}, gruppo simplettico;
SO(n) := {A ∈ O(n)|detA = 1}, gruppo speciale ortogonale;
SU(n) := {A ∈ U(n)|detA = 1}, gruppo speciale unitario.
Diamo ora la corrispondente definizione di sottoalgebra; questa è più semplice, dato che trattiamo conspazi lineari (non dobbiamo preoccuparci della struttura differenziabile).
Definizione 2.3.6. Sia g un’algebra di Lie; un sottospazio h ⊂ g è detto sottoalgebra di Lie di g se
Osserviamo che per il teorema di Binet AAT = I =⇒ detA detAT = 1 =⇒ (detA)2 = 1 =⇒detA = ±1. Quindi il gruppo O(2) consta di due parti separate, una della quali è proprio SO(2).
Si trova che, detta A la generica matrice di O(n), la condizione AAT = I implica
a) A =
(a b−b a
)con a2 + b2 = 1;
oppure
b) A =
(a bb −a
)con a2 + b2 = 1;
(c’è un parametro libero rimanente, il che caratterizza i due insiemi come 1-varietà).
Se ora decido di passare all’algebra associata o(2), ogni informazione circa l’insieme definito dalcaso b) viene perduta; questo si circostanzia nel fatto che addirittura o(2) = so(2). In generale,ogniqualvolta il gruppo di Lie consti di componenti topologicamente separate, il passaggio all’al-gebra associata elide tutte le informazioni riguardo a ogni componente connessa diversa da quellacontenente l’elemento identità – in questo caso, la matrice I. Avremo modo di osservare questo piùesplicitamente tra poco.
Che gli insiemi definiti da a) e b) siano separati è facile da osservare: affinché una matrice appartengaa entrambi gli insiemi (entrambi chiusi), è infatti necessario che sia a = −a =⇒ a = 0; maallora b = 1, e le matrici ottenute sono rispettivamente
(0 1−1 0
)e(
0 11 0
), che sono diverse (quindi
l’intersezione tra i due insiemi è vuota). è evidente che l’identità appartiene all’insieme definito daa).
Osserviamo esplicitamente che la distanza1 tra una matrice A appartenente a SO(2) (caso a)) el’identità è pari a
d(A, I) =√
(a− 1)2 + b2 + (−b)2 + (a− 1)2 = 2√
1− a,1Vedi paragrafo 2.1 per questa definizione di distanza.
2.3. Sottogruppi e sottoalgebre di Lie 25
e può pertanto essere ridotta arbitrariamente variando il parametro libero a; quella tra una matriceB ∈ O(2)\SO(2) (caso b)) e l’identità, invece, è costante:
d(B, I) =√
(a− 1)2 + b2 + b2 + (−1− a)2 = 2.
Studiamo esplicitamente l’algebra o(2): parametrizziamo la generica matrice A ∈ SO(2) facendosì che, per il valore nullo del parametro scelto, la matrice A coincida con l’identità. La scelta piùnaturale è, in questo caso:
A =
(cosx sinx− sinx cosx
).
Questa parametrizzazione copre l’intero SO(2). Lo spazio tangente all’identità è 1-dimensionale, eil suo generatore è
Come tutte le algebre 1-dimensionali, o(2) è abeliana.
Abbiamo ora modo di constatare che questa algebra è identica all’algebra associata a (R,+) cheabbiamo visto nell’esempio della sezione 2.2; questo ci segnala che l’algebra di Lie associata a ungruppo può non riuscire a distinguere gruppi molto diversi tra loro quali (R,+) e (O(2), ·).
• SU(2) = {A ∈ GL2(C)|AA† = I,detA = 1}; si trova che le matrici appartenenti a SU(2) sono dellaforma
A =
(α β−β α
), con α, β ∈ C, |α|2 + |β|2 = 1;
notiamo che i parametri liberi sono ora tre, per cui l’algebra associata sarà a sua volta 3-dimensionale.Si può dimostrare che, se α = α1 + iα2 e β = β1 + iβ2, vale
d(A, I) = 2√
1− α1.
Parametrizzando lo spazio tangente con (x1, x2, x3), e assicurandosi di centrare la parametrizzazionesulla matrice identità nel seguente modo:
α2 =1
2x3, β1 =
1
2x2, β2 =
1
2x1, α1 =
√1− 1
4(x2
1 + x22 + x2
3),
si ottiene la base dello spazio:
T1 =∂A
∂x1
∣∣∣∣0
=
(0 i/2i/2 0
);
T2 =∂A
∂x2
∣∣∣∣0
=
(0 1/2−1/2 0
);
T3 =∂A
∂x1
∣∣∣∣0
=
(i/2 00 −i/2
);
queste sono matrici proporzionali alle matrici di Pauli σj :
Tj =i
2σj ,
e formano una base per l’algebra
su(2) = {matrici antihermitiane a traccia nulla}.
26 Capitolo 2. Gruppi di Lie
Sono soddisfatte le relazioni di commutazione:
[Ti, Tj ] = −ε kij Tk, (2.3.1)
dove ε kij è un tensore totalmente antisimmetrico, detto di Levi-Civita, tale che ε 3
12 = 1.
Osserviamo che le parentesi di Lie degli elementi di base determinano quelle di ogni altro elementodello spazio; dal fatto che non sono nulle deduciamo che su(2) è un’algebra non abeliana.
2.3.3 Sottogruppi a un parametroDefinizione 2.3.7. Un omomorfismo ϕ : R→ G tra i gruppi di Lie (R,+) e (G, ·) è chiamato sottogruppoa un parametro di G.
Le proprietà di omomorfismo sono scritte come:
a) ϕ(t+ s) = ϕ(t)ϕ(s);
b) ϕ(0) = e;
c) ϕ−1(t) = ϕ(−t).
Diamo esplicitamente alcuni esempi.
Esempi
• ϕ(t) = et è un sottogruppo a un parametro del gruppo di Lie (R\{0}, ·) in quanto es+t = eset;
• ϕ(t) = eit è un sottogruppo a un parametro del gruppo di Lie (S1, ·);
• ϕ(t) =
(cos t sin t− sin t cos t
)è un sottogruppo a un parametro di SO(2) e di SU(2);
• ϕ(t) =
cos t sin t 0− sin t cos t 0
0 0 et
è un sottogruppo a un parametro di GL3(R);
Siamo interessati ai sottogruppi a un parametro perché esiste una corrispondenza biunivoca tra i vettoritangenti all’identità e i sottogruppi a un parametro di un dato gruppo di Lie. L’algebra di Lie associata,quindi, può equivalentemente essere pensata come lo spazio dei sottogruppi a un parametro del gruppo.Osserveremo come questo ci permetta, in una certa misura, di “tornare” al gruppo dopo essere passati daesso all’algebra associata.
Teorema 2.3.3. La mappa
ϕ 7→ ϕ(0) = dϕ
(d
dr
∣∣∣∣t=0
)è una corrispondenza biunivoca tra l’insieme dei sottogruppi a un parametro di G e gli elementi dellospazio tangente Te(G) ∼ g.
Dimostrazione. La mappa è ovviamente iniettiva in quanto a ogni omomorfismo ϕ corrisponde uno e unsolo vettore ϕ(0) (il vettore tangente alla curva t 7→ ϕ(t) nel punto ϕ(0)).Dimostriamo che la mappa è suriettiva. A questo scopo, consideriamo un qualunque elemento v ∈ Te(G),e associamo a esso il campo Xv definito dall’equazione 2.2.2; definiamo ϕv : R → G come l’unica curvaintegrale di Xv tale che ϕv(0) = e (questa curva esiste per il teorema 1.4.1).Per definizione, si ha ϕv(t) = Xv
ϕv(t); in quanto curva integrale, ϕv soddisfa le richieste proprietà diomomorfismo. Bisogna dimostrare che essa è definita sull’intera retta reale.Consideriamo le due curve:
t 7→ ϕv(s+ t);
2.3. Sottogruppi e sottoalgebre di Lie 27
t 7→ ϕv(s)ϕv(t) =: ψs(t);
queste sono entrambe curve integrali, in quanto, per la prima, vale
ϕv(t) = Xϕv(t) =⇒ ϕv(s+ t) = Xϕv(s+t),
e, per la seconda, tenendo conto della left-invarianza del campo Xv:
Xvψs(t)
= Xvϕv(s)ϕv(t) = dLϕv(s)(X
vϕv(t)) = dLϕv(s)(ϕv(t)) = (dLϕv(s) ◦ dϕv)
(d
dr
∣∣∣∣t
)=
= d(Lϕv(s) ◦ ϕv)(
d
dr
∣∣∣∣t
)= dψs
(d
dr
∣∣∣∣t
)= ψs(t).
Dato che entrambe le curve passano per il punto ϕv(s) per t = 0, esse coincidono. Notiamo che, se lacurva ϕv è definita almeno fino al valore del parametro s, allora la curva ψs è ben definita per ogni valoredi t ∈ (0, s), il che permette di estendere la stessa ϕv fino al valore 2s del parametro (tramite l’identitàϕv(s+ t) = ψs(t)), e, iterando il procedimento, su tutto R.
Corollario 2.3.4. Ogni campo left-invariante è completo.
Dimostrazione. Ricordiamo che ogni campo left-invariante può essere considerato un campo Xv (secondola definizione 2.2.2) per qualche v ∈ TeG; consideriamo un elemento g ∈ G, e la curva
t 7→ Lg ◦ ϕv(t)
(la curva integrale per e traslata di g). Allora, se ψ(t) = Lg ◦ ϕv(t), applicando il ragionamento delladimostrazione precedente con ψ(t) in luogo di ψs(t), si ha:
Xvψ(t) = Xv
Lg◦ϕv(t) = d(Lg ◦ ϕv(t))(
d
dr
∣∣∣∣t
)= ψ(t).
ψ è definita su tutto R, ed è la curva integrale passante per il punto g.
2.3.4 La mappa esponenzialeAbbiamo visto che, dato un campo X ∈ g (commettiamo un leggero abuso di notazione identificando ilcampo vettoriale X con il vettore Xe), questo determina un sottogruppo a un parametro ϕX di G, con
ϕX(0) = Xe ∼ X.
Definizione 2.3.8. La mappa esponenziale
exp : g→ G
è la mappa che associa a ogni X ∈ g l’elemento di G dato da
exp(X) := ϕX(1).
Per un motivo che apparirà chiaro tra poco, cerchiamo la relazione tra ϕX e ϕsX, con s ∈ R. Consideriamola mappa
h : t 7→ ϕX(st);
h è un sottogruppo a un parametro di G perché lo è ϕX, e h(t) = sϕX(st) (ricordando che se α(t) è uncurva, α(t) è la mappa f 7→ d
dr
∣∣t(f ◦ α)). Quindi
h(0) = sϕX(0) = sX;
d’altra parte,ϕsX(0) = sX,
28 Capitolo 2. Gruppi di Lie
per cui, per il teorema di unicità 1.4.1, si ha h = ϕsX, ossia
ϕX(st) = ϕsX(t) ∀s, t ∈ R.
Inserendo t = 1, e rinominando s in t, otteniamo in particolare ϕX(t) = ϕtX(1), ossia
exp(tX) = ϕX(t).
La curva individuata dal campo X (cioè, ricordiamo, da Xe) è proprio la curva exp(tX). Le proprietà diomomorfismo si possono scrivere ora nella forma familiare:
a) exp(0) = e;
b) exp(sX) exp(tX) = exp((s+ t)X);
c) exp−1(tX) = exp(−tX).
Osservazione 2.3.1. Quello che abbiamo ricavato in maniera formale si può anche trovare in maniera“naïve” nel caso di gruppi di matrici: consideriamo un sottogruppo a un parametro di matrici T (t), cheperciò soddisfi
T (s)T (t) = T (s+ t), T (0) = I;allora
T (t) = lims→0
T (s+ t)− T (t)
s= T (t) lim
s→0
T (s)− Is
= T (t)T (0),
che è un’equazione differenziale ordinaria la cui soluzione è
T (t) = etT (0).
La mappa esponenziale è il modo per “recuperare” il gruppo dopo essere passati da esso all’algebracorrispondente. Come abbiamo già avuto modo di osservare, tuttavia, il passaggio all’algebra associatacomporta la perdita di alcune informazioni riguardanti il gruppo (ad esempio, si perde l’informazionecirca le componenti non connesse all’identità; in effetti, le curve generate dalla mappa esponenziale nonpossono raggiungere tali componenti).Calcoliamo ora il differenziale della mappa esponenziale, cominciando con un’osservazione utile di carat-tere generale.Osservazione 2.3.2. Sia f : M → N una funzione regolare tra varietà, e sia p ∈ M. Un modo percalcolare df consiste nel considerare l’immagine, tramite f , di una curva α suM passante per p. Allora,se β(t) = f(α(t)), α(0) = p, β(0) = f(p), si ha
v = α(0) =⇒ w = β(0) = dfp(v).
Questo può risultare un metodo comodo per calcolare il differenziale di una funzione.Infatti
dfp(v)(ψ) = v(ψ ◦ f) ∀ψ ∈ F(N );
β(0)(ψ) =d
dt(ψ ◦ β)
∣∣∣∣0
=d
dt(ψ ◦ f ◦ α)
∣∣∣∣0
= α(0)(ψ ◦ f) = v(ψ ◦ f) = dfp(v)(ψ),
da cui si deduce che dfp(v) = β(0).Consideriamo ora la curva α : t 7→ tX in g (retta per l’origine). Allora evidentemente α(0) = 0, α(0) = X;secondo la considerazione di cui sopra, si ha quindi
(d exp)0(X) =d
dt(exp ◦α)
∣∣∣∣0
=d
dt(exp(tX))
∣∣∣∣0
= X.
Perciò(d exp)0 = 1g,
il che implica che la mappa esponenziale è localmente invertibile, avendo differenziale non singolare nelpunto 0.Esprimiamo questa conclusione nel seguente
2.3. Sottogruppi e sottoalgebre di Lie 29
Teorema 2.3.5. La mappa esponenziale è un diffeomorfismo tra un intorno di 0 in g e un intorno di ein G.
In altre parole, ogni elemento X ∈ g genera un sottogruppo a un parametro di G tramite la mappaesponenziale t 7→ exp(tX); e viceversa, ogni elemento A ∈ G in un intorno di e appartiene a un sottogruppoa un parametro di G, cioè A = exp X in un opportuno intorno di e per qualche X ∈ g.
Esempi
• Se A è una matrice, la mappa esponenziale coincide con l’esponenziazione matriciale ordinaria:
expA = eA := I +A+1
2A2 + · · · ;
infatti:
– eA converge per ogni A: sia µ ∈ R tale che |xij(A)| ≤ µ ∀i, j; allora si dimostra facilmenteper induzione che |xij(Aj)| ≤ (nµ)j ∀j = 1, 2, . . . , da cui
∑j
|xij(Aj)|j!
≤∑j
(nµ)j
j!< +∞;
– ϕ : t 7→ etA è un sottogruppo a un parametro di GLn(R), poiché
a) esAetA =
+∞∑j=0
+∞∑k=0
1
k!(j − k)!tksj−kAj =
+∞∑j=0
1
j!(t+ s)jAj = e(t+s)A;
b) (etA)−1 = e−tA (quindi eA è invertibile);c) e0 = I;
– ϕ(0) = A =⇒ etA = exp (tA).
• Considero il gruppo di Lie SO(3) = {A ∈ GL3(R)|AAT = I,detA = 1}; un suo sottogruppo a unparametro è dato dalle rotazioni attorno all’asse x di R3, parametrizzato da
A(t) =
1 0 00 cos t sin t0 − sin t cos t
;
si può infatti mostrare che A(t) = exp (tT1) con
T1 =
0 0 00 0 10 −1 0
.
T1 è il generatore delle rotazioni attorno all’asse x, e si ha appunto A(0) = T1. Un discorso analogopuò essere fatto per le rotazioni attorno all’asse y e all’asse z, generate rispettivamente dalle matrici
T2 =
0 0 −10 0 01 0 0
e
T3 =
0 1 0−1 0 00 0 0
.
Le tre matrici T1, T2 e T3 generano l’algebra so(3). Ogni rotazione in R3, d’altronde, può esserevista come rotazione attorno a un particolare asse, e appartiene pertanto al relativo sottogruppo
30 Capitolo 2. Gruppi di Lie
a un parametro: SO(3) è quindi coperto interamente dai propri sottogruppi a un parametro, o,equivalentemente, la mappa esponenziale è suriettiva da so(3) a SO(3). Non è difficile mostrare chevalgono le relazioni
[Ti, Tj ] = −ε kij Tk,
dove ε è il tensore di Levi-Civita; notiamo che queste relazioni sono identiche alle 2.3.1 trovate pergli elementi di base di su(2). Pertanto, le algebre so(3) e su(2) sono isomorfe: le matrici Ti dellabase di su(2) e quelle della base di so(3) sono due rappresentazioni diverse della stessa entità.
Viene ora naturale domandarsi se i corrispondenti gruppi di Lie SO(3) e SU(2) siano anch’essiisomorfi. Notiamo che SU(2) e SO(3) sono entrambi connessi, perciò la domanda è giustificata (nelcaso di O(3), sapevamo che esso non poteva coincidere con SU(2) in quanto O(3) non è connesso).Mostriamo che SO(3) e SU(2) non sono isomorfi.
Consideriamo a questo proposito i sottogruppi generati da T3 nell’uno e nell’altro caso:
a) SO(3) : exp (tT3) =
cos t sin t 0− sin t cos t 0
0 0 1
;
b) SU(2) : exp (tT3) = exp
[t
(i/2 00 −i/2
)]=
(eit/2 0
0 e−it/2
);
si osserva immediatamente che nel caso a) la matrice è 2π-periodica, mentre nel caso b) è 4π-periodica:
e2πT3 =
{I in SO(3)
−I in SU(2).
Questo è sufficiente per provare che gruppi connessi con la medesima algebra non sono neces-sariamente equivalenti. Avremo modo di vedere che in effetti SU(2) è un gruppo più “ricco” diSO(3).
Ciò in cui differiscono i gruppi è un’altra proprietà topologica: non più la connessione, ma la sempliceconnessione1. Indagheremo questo più a fondo in una sezione successiva.
Algebre di Lie dei gruppi classici Vogliamo ora servirci della mappa esponenziale per individuarein modo semplice le algebre di Lie dei gruppi classici di matrici.
• SU(n) con n ≥ 2. La generica matrice U ∈ SU(n) è tale che U† = U−1 e detU = 1; scrivendo Ucome esponenziale di un elemento dell’algebra,
U = eA, A ∈ su(n),
le proprietà di cui sopra si scrivono
(eA)† = (eA)−1 =⇒ eA†
= e−A =⇒ A† = −A antihermiticità;
det eA = eTrA = 1 =⇒ TrA = 0 traccia nulla.
L’algebra su(n) è pertanto formata dalle matrice antihermitiane a traccia nulla; la condizione diantihermiticità prescrive che i numeri lungo la diagonale siano immaginari puri, dando n sceltepossibili, e che i numeri nel triangolo inferiore della matrice siano determinati da quelli nel triangolosuperiore, che possono essere scelti in n2−n modi diversi (essendo numeri complessi); la condizionedi traccia nulla toglie un grado di libertà, cosicché la dimensione dell’algebra è pari a
dim su(n) = n2 − 1.
1Una varietà M è semplicemente connessa se per ogni curva chiusa in essa contenuta è possibile trovare un’omotopiache mappi la curva in un punto appartenente alla varietà. Un’omotopia tra due funzioni f, g : I →M (con I intervallo di R)è una funzione continua H : I × [0, 1] tale che H(t, 0) = f(t) e H(t, 1) = g(t), cioè una deformazione continua del sostegnodi f in quello di g.
2.3. Sottogruppi e sottoalgebre di Lie 31
Dato che la dimensione del gruppo (inteso come varietà) e quella dell’algebra (intesa come spaziovettoriale) sono la medesima, SU(n) è una varietà (n2 − 1)-dimensionale.
• SO(n) con n ≥ 2. La generica matrice M ∈ SO(n) è tale che MT = M−1 e detM = 1; scrivendoM come esponenziale di un elemento dell’algebra,
M = eA, A ∈ so(n),
le suddette proprietà si scrivono
(eA)T = (eA)−1 =⇒ eAT
= e−A =⇒ AT = −A antisimmetria;
det eA = eTrA = 1 =⇒ TrA = 0 traccia nulla.
L’algebra so(n) è formata dalle matrice antisimmetriche; notiamo che la condizione di traccia nullaè implicata dalla richiesta di antisimmetria, e pertanto non costituisce alcun vincolo extra; questosi riflette nel fatto che le algebre o(n) e so(n) coincidono, come abbiamo avuto modo di vedere pern = 3. La condizione di antisimmetria garantisce una libertà di (n2 − n)/2 (i numeri sono reali),sicché
dim so(n) =n2 − n
2.
• Sp(n) con n pari. La generica matrice U ∈ Sp(n) è tale che U† = U−1 e UT = JU−1J−1 dove
J :=
(On/2 In/2−In/2 On/2
); (2.3.2)
scrivendo U come esponenziale di un elemento dell’algebra,
U = eA, A ∈ sp(n),
le proprietà si scrivono1
(eA)† = (eA)−1 =⇒ A† = −A antihermiticità;
(eA)T = J(eA)−1J−1 =⇒ eAT
= e−JAJ−1
=⇒ AT = −JAJ−1.
è possibile dimostrare che
dim sp(n) =n2 + n
2.
• SO(p, q) := {A ∈ Mn(R) | n = p + q, AT = gA−1g−1, con g :=(
Ip Op×qOq×p −Iq
), detA = 1} (il tipico
esempio di questa classe di gruppi, incontrato in relatività ristretta, è il gruppo di Lorentz SO(3, 1);la matrice g può essere interpretata come la metrica dello spazio). Scriviamo la generica matriceM ∈ SO(p, q) come esponenziale di un elemento dell’algebra,
M = eA, A ∈ so(p, q);
le proprietà di M si scrivono
(eA)T = g(eA)−1g−1 =⇒ AT = −gAg−1;
det eA = 1 =⇒ TrA = 0.
1Riguardo la seconda proprietà, è immediato dimostrare che BeAB−1 = eBAB−1per ogni matrice A e per ogni matrice
invertibile B, semplicemente applicando la definizione di esponenziale.
32 Capitolo 2. Gruppi di Lie
Anche in questo caso, si può mostrare agilmente che la condizione di traccia nulla segue dalla prima;la dimensione dell’algebra (e del gruppo) è anche in questo caso
dim so(p, q) =n2 − n
2.
Consideriamo il gruppo SO(1, 1), il più semplice possibile gruppo di questa classe. Questo è ungruppo di Lie di dimensione 1. La generica matrice M ∈ SO(1, 1) si può scrivere nella forma
M =
(x yy x
)con x2 − y2 = 1;
scriviamo la matrice M come esponenziale di un elemento dell’algebra:
M = eA con A ∈ so(1, 1);
si può dimostrare che A = t
(0 11 0
). Esistono due possibilità per parametrizzare M , e cioè:
a) M =
(cosh t sinh tsinh t cosh t
);
b) M =
(− cosh t − sinh t− sinh t − cosh t
).
L’insieme di matrici del tipo a) è separato da quello delle matrici del tipo b); la matrice identitàappartiene evidentamente al primo tipo. Quindi l’insieme SO(1, 1) consta di due componenti (e sipuò mostrare che O(1, 1), definito come SO(1, 1) ma senza la condizione di determinante unitario,consta di quattro componenti). Osserviamo che in questo caso
d(M, I) =
√2(cosh t− 1)2 + 2 sinh2 t = 2
√cosh2 t− cosh t
t→∞−→ +∞,
cioè la distanza tra l’identità e una matrice del tipo a) può essere resa grande a piacere; nel caso diSO(2), ricordiamo, la distanza era sempre compresa tra 0 e 2
√2.
Questo significa che il gruppo SO(1, 1) non è limitato. Più in generale, si può affermare il seguenterisultato: il gruppo SO(n) è un gruppo compatto per ogni n; il gruppo SO(p, q) (con p, q > 1) èsempre non compatto.
Un’importante proprietà della mappa esponenziale è che può essere fatta commutare con gli omomorfismi.Abbiamo già visto come ogni omomorfismo di gruppi ϕ generi automaticamente un omomorfismo tra lecorrispettive algebre, dato da dϕ.
Teorema 2.3.6. Se ϕ : G → H è un omomorfismo di gruppi di Lie, allora
ϕ(expg X) = exph(dϕ(X)) ∀X ∈ g
(avendo indicato con un pedice l’algebra su cui agisce l’esponenziale; questo verrà d’ora in poi sottinteso).Ossia, vale il seguente diagramma commutativo:
Gϕ// H
gdϕ//
exp
OO
h
exp .
OO
2.3. Sottogruppi e sottoalgebre di Lie 33
Dimostrazione. Sia X ∈ g; considero la curva in H:
t 7→ ϕ(exp(tX)).
Il vettore tangente alla curva in t = 0 è, per la definizione 1.3.1,
dϕ
(d
dt
∣∣∣∣0
)= dϕ(X);
d’altra parte, questa curva è un sottogruppo a un parametro di H, dato che vale la proprietà di omomor-fismo
ϕ(exp(tX))ϕ(exp(sX)) = ϕ(exp((t+ s)X)).
Sappiamo anche che la curvat 7→ exp(tdϕ(X))
è l’unico sottogruppo a un parametro il cui vettore tangente nel punto 0 è dϕ(X); le due curve devonoquindi coincidere. Ponendo t = 1, si ottiene la tesi.
Questo teorema costituisce una sorta di “viceversa” del teorema 2.3.1: se ho una rappresentazione dell’al-gebra
ψ : g→ gln(R),
posso costruire la mappaexpψ
e domandarmi se questa sia una rappresentazione di G. Questo equivale a chiedersi se esista un omomor-fismo
ϕ : G → Mn(R)
tale che ψ = dϕ, nel qual caso (per il teorema appena visto)
exp(ψ(X)) = ϕ(exp(X)).
Avremo modo di constatare che non sempre questo omomorfismo esiste.Enunciamo ora un teorema che mostra come si traduca la non abelianità di un gruppo sulla scritturadegli elementi di tale gruppo in forma di esponenziali dell’algebra.
Teorema 2.3.7. (di Baker-Campbell-Hausdorff) Sia G un gruppo di Lie con algebra associata g;allora, per ogni X,Y ∈ g, esiste in g una curva t 7→ Z(t) tale che
exp(tX) exp(tY) = exp(Z(t)),
e vale per Z la scrittura in serie:
Z(t) = t(X + Y) +1
2t2[X,Y] +
1
12t3([X, [X,Y]]− [Y, [X,Y]]) + · · · .
Osservazione 2.3.3. Se in particolare g è un’algebra commutativa, allora
exp(X) exp(Y) = exp(X + Y),
e questo implica che G è abeliano1. Vedremo che vale anche il viceversa.
La mappa esponenziale, come è evidente, non può raggiungere componenti di G non connesse con l’identità(essendo una mappa continua). Se però G è connesso, il seguente teorema fornisce una condizione sufficienteperché la mappa esponenziale raggiunga ogni punto del gruppo.
1Consideriamo qui G connesso e compatto, in modo tale che la mappa esponenziale sia effettivamente suriettiva su di esso(vedi il teorema seguente); altrimenti, possiamo comunque affermare che G è abeliano sull’intorno dell’identità “raggiunto”dalla mappa esponenziale.
34 Capitolo 2. Gruppi di Lie
Teorema 2.3.8. Se G è un gruppo connesso e compatto, allora la mappa esponenziale è suriettiva su diesso.
Esistono altri risultati analoghi, ma possiamo dire che in generale i gruppi non compatti possono nonessere coperti interamente dall’esponenziale.Abbiamo già visto che ogni elemento del gruppo (compatto) SO(3) è esprimibile come esponenziale di unqualche elemento dell’algebra generata dalle matrici T1, T2 e T3. Estendiamo ora questa considerazionead altri gruppi compatti.
• Il gruppo unitario U(n). Consideriamo una matrice A ∈ U(n), e supponiamo che sia diagonale:
A = diag(λ1, . . . , λn).
Poiché i λi sono numeri complessi non nulli (A è invertibile), possiamo estrarne il logaritmo e scrivere
A = ea con a = diag(log λ1, . . . , log λn).
Nel caso di A generica, esiste sempre una matrice B ∈ U(n) tale che BAB−1 è diagonale eappartenente a U(n), cosicché ∃a : BAB−1 = ea, da cui
A = B−1eaB = eB−1aB ,
sicché A è un’esponenziale; quindi la mappa esponenziale è suriettiva su U(n).
• Il gruppo speciale ortogonale SO(n). In questo caso dobbiamo adottare una strategia leggermentediversa. Se A ∈ SO(n) è diagonale (con A = diag(λ1, . . . , λn)), dato che AAT = I si ha che λi = ±1;posso ora osservare che1
exp
[t
(0 1−1 0
)]=
(cos t sin t− sin t cos t
),
da cui (−1 00 −1
)= exp
(0 π−π 0
);
dato che detA = λ1 · · ·λn = 1, è necessario che vi sia un numero pari di −1. Posso scrivere Acome esponenziale di una matrice diagonale a blocchi, in cui i blocchi sono sottomatrici quadrate dizeri con π in alto a destra e −π in basso a sinistra in corrispondenza delle occorrenze dei −1 sulladiagonale. Ad esempio:
Ripetendo il ragionamento di cui sopra, posso dunque affermare che exp è suriettiva su SO(n).
• Il sottogruppo di GL2(R) delle matrici 2× 2 invertibili con determinante positivo contiene elementiche non sono scrivibili come esponenziale di una matrice; un esempio è dato dalla matrice(
−2 00 −1
);
questo può accadere perché il gruppo in questione non è compatto.
Enunciamo ora due risultati noti come primo e secondo teorema di Lie.1Cfr. il primo esempio della sezione 2.3.3.
2.3. Sottogruppi e sottoalgebre di Lie 35
Teorema 2.3.9. Per ogni algebra di Lie g esiste un gruppo di Lie G tale che g è l’algebra associata a G.
Teorema 2.3.10. Se G1 e G2 sono due gruppi di Lie le cui algebre associate sono isomorfe, allora essistessi sono isomorfi in un intorno dell’identità. Se inoltre sono due gruppi semplicemente connessi, essisono isomorfi globalmente.
Riconsideriamo gli esempi studiati in precedenza alla luce del secondo teorema di Lie.
• (R,+) e SO(2), come abbiamo visto, hanno algebre isomorfe (1-dimensionali); tuttavia, non sonoisomorfi. Ricordiamo infatti che SO(2), essendo isomorfo a S1 (la 1-sfera), non è semplicementeconnesso, mentre R lo è. Posso concepire S1 come il risultato della quozientazione di R rispetto algruppo degli interi:
S1 = R/Z
(dal momento che si ottiene dalla retta reale indentificando due punti che distino tra loro 2π);viceversa, R è uno “srotolamento” della 1-sfera, o più formalmente un suo ricoprimento. Diciamoinfatti che un insieme A è un ricoprimento di B se B è un quoziente (non banale) di A; in più,se A è un insieme semplicemente connesso, si dice che A è il ricoprimento universale di B: l’usodell’articolo determinativo è giustificato dal fatto che il ricoprimento universale è unico a meno diisomorfismi. Abbiamo quindi che R è il ricoprimento universale di S1.
• Abbiamo visto che SO(3) e SU(2) hanno algebre isomorfe, ma non sono isomorfi essi stessi. Mo-striamo che in effetti SU(2) è un doppio ricoprimento, nonché il ricoprimento universale, di SO(3).Una matrice di SU(2) è della forma
A =
(α β−β α
)con |α|2 + |β|2 = 1;
siano α = α1 + iα2 e β = β1 + iβ2: posso pensare alla 4-pla v := (α1, α2, β1, β2) come a un elementodi R4. Il vincolo su questi numeri si esprime allora nella forma ‖v‖2 = 1. SU(2) è pertanto una3-sfera in R4, e in quanto tale è semplicemente connesso (l’n-sfera è semplicemente connessa perogni n ≥ 2); mostriamo che è anche un ricoprimento di SO(3).
A questo scopo, introduciamo l’insieme H dei quaternioni ; un quaternione q può essere scritto nellaforma
q = a+ ib+ jc+ kd,
dove i, j, k sono tre unità immaginarie indipendenti che soddisfano le relazioni di Hamilton:
i2 = j2 = k2 = ijk = −1,
da cui deriva l’anticommutazione ij + ji = jk + kj = ki + ik = 0. Così come C è isomorfo a R2,allo stesso modo H è isomorfo a R4, prendendo la base {1, i, j, k}; è anche isomorfo a C2, dato cheè possibile sfruttare le proprietà di commutazione delle unità immaginarie per scrivere q = α+ jβ,avendo posto α = a + ib, β = c + id. L’isomorfismo più rilevante è però quello tra H e M2(C): èpossibile mostrare che, associando a q la matrice
q :=
(α β−β α
),
(con α e β come sopra), vengono preservate le proprietà del prodotto quaternionale, nel sensoche la matrice corrispondente al prodotto tra quaternioni q1q2 è proprio la matrice q1q2; inoltre,definendo il prodotto scalare tra quaternioni q1 = α1 + jβ1 = a1 + ib1 + jc1 +kd1 e q2 = α2 + jβ2 =a2 + ib2 + jc2 + kd2 nel seguente modo:
〈q1, q2〉 := a1a2 + b1b2 + c1c2 + d1d2,
36 Capitolo 2. Gruppi di Lie
si può mostrare che vale la proprietà
〈q1, q2〉 =1
2(α1α2 + α2α1 + β1β2 + β2β1) =
=1
2Tr
[(α1 β1
−β1 α1
)(α2 −β2
β2 α2
)]=
1
2Tr(q1q2
†),
e in particolare|q|2 := 〈q, q〉 = det q.
Inoltre, la coniugazione quaternionale viene tradotta nella coniugazione hermitiana:
q := a− ib− jc− kd = q†.
Osserviamo cheS3 ∼ {q ∈ H | |q| = 1} ∼ SU(2),
analogamente a come S1 ∼ SU(1). Da qui in avanti confonderemo il quaternione q ∈ H con lamatrice corrispondente q ∈ M2(C). Consideriamo ora il sottinsieme di H (isomorfo a R3):
H0 := {q ∈ H | q = −q} = {ib+ jc+ kd | b, c, d ∈ R}
dei quaternioni immaginari, e la mappa
ϕ : SU(2)→ Aut(H0)
A 7→ ϕ(A)
dove ϕ(A) è definita daϕ(A) : q 7→ AqA−1.
Osserviamo innanzitutto che ϕ(A) è in effetti lineare, e mappa H0 in H0; infatti
ϕ(A)(q) =(AqA−1
)†=(AqA†
)†= Aq†A† = −AqA† = −AqA−1 = −ϕ(A)(q),
cioè ϕ(A)(q) ∈ H0. Questa mappa è invertibile: infatti
|ϕ(A)(q)|2 = det(AqA−1) = det q = |q|2,
cioè ϕ(A) conserva le norme. Da quest’ultima proprietà deduciamo che ϕ(A) (vista ora come matricequadrata) appartiene al gruppo O(3); ma ϕ è una mappa regolare, quindi manda insieme connessiin insiemi connessi; allora
Im(ϕ) = SO(3)
(infatti Im(ϕ) 3 I, chiaramente). Vediamo che ϕ è un omomorfismo tra SU(2) e SO(3): vale laproprietà
A ∈ Ker(ϕ)def⇐⇒ ϕ(A) = IH0 ⇐⇒ AqA−1 = q ∀q ∈ H0 ⇐⇒ Aq = qA ∀q ∈ H0;
si può dimostrare che questo è possibile se e solo se A = ±I. Ricordando infatti che
q ∈ H0 ⇐⇒ q =
(ib c+ id
−c+ id −ib
),
si consideri in particolare
q =
(i 00 −i
);
2.3. Sottogruppi e sottoalgebre di Lie 37
allora, la matrice
A =
(α β−β α
)∈ SU(2)
appartiene al nucleo1 di ϕ se(i 00 −i
)(α β−β α
)=
(α β−β α
)(i 00 −i
)=⇒ i
(α ββ −α
)= i
(α −β−β −α
),
che implica β = 0; in modo analogo, considerando
q =
(0 1−1 0
)si ha la condizione(
0 1−1 0
)(α β−β α
)=
(α β−β α
)(0 1−1 0
)=⇒
(−β α−α −β
)=
(−β α−α −β
),
da cui α = α; allora A = λI, λ ∈ R, e dalla condizione detA = 1 si ricava λ = ±1. Abbiamoperciò mostrato che Ker(ϕ) = {±I}, cioè che ϕ è una mappa due a uno (ogni coppia di matriciA,−A ∈ SU(2) viene mappata nello stesso elemento ϕ(A) ∈ SO(3)); in definitiva,
SO(3) = SU(2)/{±I}.
1Si denota con Ker(ϕ) il nucleo di ϕ; il nucleo di un omomorfismo tra i gruppi G e H è definito come l’insieme deglielementi di G che vengono mandati nell’elemento identità di H.
38 Capitolo 2. Gruppi di Lie
2.4 Rappresentazione aggiuntaLa mappa ϕ studiata nel precedente esempio implementa un omomorfismo tra il gruppo SU(2) e l’insiemedegli automorfismi di su(2), stabilendo una rappresentazione del gruppo in termini di automorfismi del-l’algebra associata al gruppo stesso. Questo tipo di rappresentazione è detta rappresentazione aggiunta,e può essere definita per qualunque gruppo di Lie.Vediamo perciò il caso generale; iniziamo con la seguente
Definizione 2.4.1. Sia G un gruppo di Lie; definiamo, per ogni g ∈ G, l’operazione di aggiunzione sulgruppo data dall’automorfismo:
Ig : G → Gg′ 7→ gg′g−1,
vale a dire Ig := Lg ◦ Rg−1 .
È appena il caso di notare che Ig è in effetti una mappa lineare:
Ig(g′g′′) = Ig(g
′)Ig(g′′) ∀g′, g′′ ∈ G,
regolare e invertibile (essendolo tanto Lg quanto Rg).
Possiamo ora dare la definizione di rappresentazione aggiunta.
Definizione 2.4.2. Si dice rappresentazione aggiunta del gruppo di Lie G l’omomorfismo
Ad : G → Aut(g)
definito, per ogni g ∈ G, daAd(g) := dIg
∣∣e.
Di seguito ometteremo la specificazione per cui dIg è valutato sull’identità del gruppo, in quanto sottintesa.La mappa Ad così definita è un omomorfismo perché
Ad(g1g2) = dIg1g2= d(Ig1
◦ Ig2) = dIg1
◦ dIg2= Ad(g1) ◦Ad(g2),
dove si è fatto uso del lemma 2.2.1.
Come ogni omomorfismo tra gruppi di Lie, anche Ad induce un omomorfismo tra le corrispettive algebretramite il differenziale; diamo perciò la seguente
Definizione 2.4.3. Si dice rappresentazione aggiunta dell’algebra di Lie g associata al gruppo G l’omo-morfismo
ad : g→ End(g)
definito, per ogni X ∈ g, daad(X) := d(Ad)
∣∣e(X).
Ancora, scriveremo semplicemente d(Ad) al posto di d(Ad)∣∣e. Inoltre, adotteremo la conveniente notazione
per cui l’immagine di g ∈ G tramite Ad è scritta Adg, e l’immagine di X ∈ g tramite ad è scritta adX.La rappresentazione aggiunta del gruppo è rappresentata nel diagramma commutativo:
GIg// G
gdIg
//
exp
OO
g
exp ;
OO
mentre quella dell’algebra nel seguente:
G Ad // Aut(g)
gd Ad
//
exp
OO
End(g)
exp .
OO
2.4. Rappresentazione aggiunta 39
Esempio: gruppi di matrici Consideriamo la matrice A ∈ G, dove G è un gruppo di matrici (comeGLn(R),O(n),SO(n), . . . ); allora l’aggiunzione è data da
IA : B 7→ ABA−1 ∀A,B ∈ G.
Possiamo scrivere oraB = eb
dove b ∈ g; vogliamo applicare la considerazione 2.3.2: consideriamo il sottogruppo a un parametro etb, emappiamolo tramite IA, per poi prendere il generatore del sottogruppo a un parametro così ottenuto:
d
dtIA(etb)
∣∣∣∣t=0
=d
dt
(AetbA−1
) ∣∣∣∣t=0
= AbA−1.
Quindi AdA : b 7→ AbA−1.
Consideriamo ora la rappresentazione aggiunta dell’algebra; scriviamo quindi A = ea, con a ∈ g, econsideriamo eta; di nuovo, prendiamo il generatore dell’immagine di tale sottogruppo via Ad; si ottiene:
ada(b)def=
d
dtAdeta(b)
∣∣∣∣t=0
=d
dt
[etabe−ta
] ∣∣∣∣t=0
= (aetabe−ta − etabae−ta)∣∣t=0
= ab− ba = [a, b].
Quindi ada : b 7→ [a, b].Osservazione 2.4.1. La relazione adX(Y) = [X,Y] per ogni X,Y ∈ g (dove [, ] rappresenta l’operazione diparentesi di Lie definita sull’algebra) è di carattere generale, e può essere dimostrata per ogni algebra g.Osservazione 2.4.2. Avevamo visto in precedenza che se l’algebra è commutativa, allora il gruppo corri-spondente è (almeno localmente) abeliano1; ora possiamo vedere che vale anche il viceversa, a patto diprendere G connesso. Infatti:
Ig = 1G =⇒ Adg = 1g ∀g ∈ G (rappresentazione triviale)=⇒ adX = Og ∀X ∈ g;
allora [X,Y] = adX(Y) = 0 ∀X,Y ∈ g, ossia g è commutativa.Osservazione 2.4.3. Supponiamo che G abbia un sottoinsieme di elementi che commutano con tutti glielementi del gruppo:
Z(G) := {g ∈ G | gh = hg ∀h ∈ G};
l’insieme Z è detto centro del gruppo G, ed è immediato verificare che ne è un sottogruppo. Notiamo inparticolare che Z 3 e sempre. Ad esempio, abbiamo avuto modo di osservare che Z(SU(2)) = {±I}.Gli elementi del centro vegono tutti rappresentati, tramite Ad, dalla mappa identica:
g ∈ Z(G) =⇒ Ig = 1G =⇒ Adg = 1G .
Questo equivale a dire che il centro è contenuto nel nucleo di Ad; in realtà, si può vedere che
il centro dell’algebra; di nuovo, si può mostrare che Z(g) è una sottoalgebra di g, e vale
Z(g) = Ker(ad).
Si può dimostrare che Z(g) è l’algebra di Lie associata al gruppo di Lie Z(G).
Una rappresentazione è detta fedele se è iniettiva. Come è facile comprendere intuitivamente, una rap-presentazione non può essere fedele se Z(G) contiene elementi diversi da e.
Osservazione 2.4.4. Supponiamo che il gruppo G possieda un sottogruppo invariante S, ossia un sotto-gruppo tale che
gsg−1 ∈ S ∀s ∈ S ∀g ∈ G.
Allora la mappa Ig∣∣S manda effettivamente il gruppo S in se stesso (per ogni g ∈ G), cioè è un automor-
fismo di S; se ora costruiamo la rappresentazione Adg, vediamo che g è rappresentato anche in terminidi un automorfismo dell’algebra di Lie s associata a S (che si può dimostrare essere una sottoalgebrainvariante di g, nel senso che [X,Y] ∈ s ∀X ∈ s ∀Y ∈ g).
Nota bene: in generale, se H è un sottogruppo di G, allora h è una sottoalgebra di g; viceversa, per ognih sottoalgebra di g esiste uno e un solo H sottogruppo connesso di G la cui algebra associata è h.Inoltre, a ogni S sottogruppo invariante di G corrisponde una s sottoalgebra invariante di g. Si dice ancheche s è un ideale di g.
Allora la mappa Adg può essere ristretta a:
Adg∣∣s
: s→ s;
cioè, s è un sottospazio invariante della rappresentazione aggiunta Ad:
Adg(s) ⊂ s ∀g ∈ G.
Quando è possibile restringere in questo modo la rappresentazione Ad, si parla di rappresentazione ridu-cibile (ed è possibile ridurre in modo analogo ad). Riassumendo le considerazioni esposte sopra, possiamoaffermare che la riducibilità di una rappresentazione è legata alla presenza di ideali non banali dell’algebraassociata al gruppo (con “non banali” si intende diversi da {0} e da g). Notiamo in particolare che Z(G)è un sottogruppo invariante di G, e allo stesso modo Z(g) è un ideale di g.
Esempio Il gruppo SU(2).Consideriamo la matrice generica di SU(2) data da
A =
(α β−β α
)con |α|2 + |β|2 = 1;
si ha allora
AdA : b 7→ AbA−1 ∀b ∈ su(2);
poiché una base di su(2) è {Tj}j := {iσj/2}j (con σj matrici di Pauli), calcoliamo le matrici AdA(Tj) perj = 1, 2, 3 e scriviamo esplicitamente la matrice rappresentativa di AdA in questa base; ad esempio, perT1 si ha:
2 = 1, si può verificare che questa è in effetti la generica matrice di SO(3).Si vede esplicitamente che Ad±ISU(2)
↪→ ISO(3).Avendo nucleo non banale, la rappresentazione A 7→ AdA non è fedele. In effetti, come già visto, si ha perogni A ∈ SU(2):
ϕ(−A) = ϕ(−I)ϕ(A) = Iϕ(A) = ϕ(A).
In generale, se ho un gruppo di Lie G con algebra associata g, la cui base è {T1, . . . , Tn}, scrivo (perqualunque A ∈ G)1:
AdA(Ti) = ATiA−1 =: [AdA]jiTj
(avendo indicato con [AdA] la matrice n×n rappresentativa di AdA nella base dei {Tj}j); analogamente,per qualunque a ∈ g, scrivo:
ada(Ti) = [a, Ti] =: [ada]jiTj ;
sono d’altronde note le relazioni di commutazione dei vettori di base:
[Ti, Tj ] = f kij Tk
(gli n3 numeri f kij sono detti costanti di struttura dell’algebra g); ponendo al posto di a il vettore Tk, si
ha quindi
adTk(Ti) = [Tk, Ti] = f jki Tj = [adTk ]jiTj ,
da cui
[adTk ]ji = f jki .
La rappresentazione aggiunta dell’algebra si costruisce quindi a partire dalle costanti di struttura dellastessa.Nel caso di su(2), abbiamo f j
ki = −ε jki , cioè
f 312 = −f 3
21 = f 123 = −f 1
32 = f 231 = −f 2
13 = −1;
tutte le altre costanti sono nulle. Quindi si ha
[adT1 ] =
0 0 00 0 10 −1 0
;
[adT2 ] =
0 0 −10 0 01 0 0
;
[adT3 ] =
0 1 0−1 0 00 0 0
.
Abbiamo ritrovato così i generatori di so(3). Notiamo da ultimo che la rappresentazione a 7→ ada è fedele.
1Come al solito, si sottindende la sommazione su indici ripetuti.
42 Capitolo 2. Gruppi di Lie
2.5 Studio delle algebre di LieA partire da adesso, concentreremo le nostre attenzioni sulle algebre di Lie e sulle loro proprietà, purricordando che l’oggetto del nostro interesse ultimo sono i gruppi di Lie cui queste algebre sono associate;avremo modo di constatare, come già detto, che molte proprietà del gruppo possono essere studiateproprio a partire dall’algebra.
2.5.1 Forma di KillingCominciamo con la seguente
Definizione 2.5.1. Sia g un’algebra di Lie; la mappa
B : g× g→ R
definita daB(X,Y) := Tr(adX ◦ adY)
è detta forma di Killing sull’algebra g.
Mettiamo in evidenza alcune proprietà della forma di Killing.
Osservazione 2.5.1. B è una mappa bilineare e simmetrica, come segue dalle proprietà della traccia.Osservazione 2.5.2. B è “Ad-invariante”, nel senso che
B(X,Y) = B(Adg(X),Adg(Y)) ∀g ∈ G;
infatti, notiamo che in generale se σ è un automorfismo di g, allora (per la definizione 2.3.3 di automorfismodi algebre) vale [σ(X), σ(Y)] = σ([X,Y]), da cui
adσ(X)(σ(Y)) = σ(adX(Y)),
cioèadσ(X) ◦ σ = σ ◦ adX,
o ancoraadσ(X) = σ ◦ adX ◦ σ−1.
Nel nostro caso, σ = Adg, sicché
B(Adg(X),Adg(Y)) = Tr(adAdg(X) ◦ adAdg(Y)) =
= Tr(Adg ◦ adX ◦Ad−1g ◦Adg ◦ adY ◦Ad−1
g ) = Tr(adX ◦ adY) = B(X,Y),
per la ciclicità della traccia.
Esempio
• SU(2).
A partire dalla ormai ben nota base di su(2), {T1, T2, T3}, e ricordando l’espressione trovata allafine della sezione precedente per le [adTi ], possiamo calcolare la forma di Killing sui vettori di base:
B(Ti, Tj) = Tr(adTi ◦ adTj ) = −2δij .
Questa è una forma non degenere definita negativa.
ossia, posso ricavare l’espressione della forma di Killing direttamente dalla costanti di struttura.
• u(2).
Come abbiamo già visto, gli elementi dell’algebra u(2) sono le matrici antihermitiane, cioè quelledella forma
A =
(ia c+ id
−c+ id ib
);
è possibile decomporre tale matrice nel seguente modo:
A =
(ia−b2 c+ id−c+ id −ia−b2
)︸ ︷︷ ︸
∈ su(2)
+ i
(a−b
2 00 a−b
2
)︸ ︷︷ ︸
∝ I
.
Prima di proseguire, diamo la seguente definizione.
Definizione 2.5.2. Un’algebra g è chiamata somma diretta delle algebre g1 e g2 se ne è sommadiretta come spazio vettoriale, e se inoltre
[X1,X2] = 0 ∀X1 ∈ g1 ∀X2 ∈ g2.
In questo caso, si scriveg = g1 ⊕ g2.
Osservazione 2.5.3. Se g = g1 ⊕ g2, allora tanto g1 quanto g2 sono ideali di g.
Abbiamo dunque cheu(2) = su(2)⊕ u(1)
(dove si è indicata con u(1) l’algebra unidimensionale banale, equivalente a so(2) o a S1); infatti,gli elementi di u(1) commutano banalmente con ogni matrice. In particolare, u(1) coincide con ilcentro di u(2) (vedi l’osservazione 2.4.3).
Compiamo alcune osservazioni in merito all’esempio appena osservato.
Osservazione 2.5.4. Le considerazioni appena svolte possono essere generalizzate a u(n) per ogni nmaggiore o eguale a due; si ha cioè
u(n) = su(n)⊕ u(1) ∀n ≥ 2.
Osservazione 2.5.5. Se un’algebra qualunque g possiede un centro Z(g) non banale, allora
g = g′ ⊕ Z(g)
per qualche algebra g′.
L’algebra u(2) ha dimensione 4; una base opportuna di generatori per tale algebra è data da {T1, T2, T3, T4},con T1, T2, T3 identici a quelli di su(2) e T4 = i
2 I. Si ha (ovviamente) [Ti, T4] = 0 ∀i = 1, 2, 3, cosicchéle costanti di struttura f k
ij non nulle sono esattamente quelle di su(2). Dal momento che, come abbiamovisto,
[adTk ]ji = f jki ,
44 Capitolo 2. Gruppi di Lie
si trova che
[adT1 ] =
0 0 0 00 0 1 00 −1 0 00 0 0 0
; [adT2 ] =
0 0 −1 00 0 0 01 0 0 00 0 0 0
;
[adT3] =
0 1 0 0−1 0 0 00 0 0 00 0 0 0
; [adT4] =
0 0 0 00 0 0 00 0 0 00 0 0 0
= O4.
Si può a questo punto calcolare la forma di Killing, che risulta essere
B(Ti, Tj) = −2δij per i, j = 1, 2, 3;
B(Tα, T4) = 0 per α = 1, 2, 3, 4.
Questa è una forma degenere. Il motivo di questa degenerazione è da ricercarsi nella presenza del centrou(1), come vedremo a breve.
Di seguito vengono date (senza dimostrazione) le forme di Killing per alcuni gruppi classici di matrici.
• su(n) : B(X,Y) = 2nTr(XY);
• u(n) : B(X,Y) = 2nTr(XY)− 2 TrX TrY;
• so(n) : B(X,Y) = (n− 2)Tr(XY);
• sp(n) : B(X,Y) = 2(n+ 1)Tr(XY);
Studiamo un altro esempio, diveso da entrambi i precedenti per quanto riguarda le proprietà della formaB.
Esempio
• SO(2, 1).Come abbiamo visto,
A ∈ so(2, 1) ⇐⇒ AT = −gAg−1 dove g = diag(1, 1,−1);
si trova che
A =
0 x y−x 0 zy z 0
.
L’algebra è quindi 3-dimensionale; i suoi elementi sono molto simili a quelli di so(3), benché conuna “parte simmetrica”. Una base naturale dell’algebra è data da
T1 =
0 0 00 0 10 1 0
, T2 =
0 0 −10 0 0−1 0 0
, T3 =
0 1 0−1 0 00 0 0
.
Si trovano i commutatori
[T1, T2] = T3, [T2, T3] = −T1, [T3, T1] = −T2;
le Ti sono proprio le matrici dell’aggiunta [adTi ], cosicché la forma di Killing è
Questa è perciò una forma non degenere indefinita. Quest’ultima proprietà è legata alla non com-pattezza del gruppo.
2.5. Studio delle algebre di Lie 45
2.5.2 Algebre semisemplici e criteri di Cartan
Avevamo visto che la presenza di un centro non banale nell’algebra (ad esempio, u(2)) causa la degene-razione della forma di Killing definita sulla stessa; in realtà, come vedremo meglio tra poco, è sufficienteche sia presente un ideale abeliano.Supponiamo infatti che l’algebra g sia la somma delle sottoalgebre p e j generate rispettivamente daisistemi (disgiunti) {Pi} e {Jj}, e che p sia in particolare un ideale; si ha, per definizione1:
[P, P ] = P [P, J ] = P [J, J ] = J.
Diciamo in questo caso che g è una somma semidiretta delle algebre p e j, e scriviamo
g = p +sj;
se in particolare anche j è un ideale di g, allora g è somma diretta delle due algebre. Supponiamo ora chep sia un ideale abeliano. Le relazioni di cui sopra diventano
[P, P ] = 0 [P, J ] = P [J, J ] = J ;
una situazione del genere vale per il gruppo di Poincarè (nel qual caso p genererebbe il sottogruppo delletraslazioni, evidentemente abeliano, e j il gruppo di Lorentz). In questo caso si ha che
adP (P ) = 0 adP (J) = P adJ(P ) = P adJ(J) = J,
cioè
adP :
{P → 0
J → PadJ :
{P → P
J → J;
le matrici [adP ] e [adJ ] che agiscono sui vettori J =
(6= 00
)e P =
(06= 0
)hanno dunque la forma
adJ =
(6= 0 0
0 6= 0
), adP =
(0 0
6= 0 0
).
Da ciò vediamo subito che la forma di Killing è degenere:
B(J, J) = Tr(adJ ◦ adJ) = Tr
(6= 0 0
0 6= 0
)6= 0;
B(J, P ) = Tr(adJ ◦ adP ) = Tr
[(6= 0 0
0 6= 0
)(0 0
6= 0 0
)]= Tr
(0 0
6= 0 0
)= 0;
B(P, P ) = Tr(adP ◦ adP ) = Tr
( 0 0
6= 0 0
)2 = TrO = 0.
È bene evidenziare la differenza rispetto al caso di u(2), in cui la presenza del centro causava la degene-razione già a livello della rappresentazione aggiunta; qui, invece, l’aggiunta non è degenere, ma solo laforma di Killing.
Allo scopo di generalizzare le considerazioni svolte sopra, introduciamo il concetto di semisemplicità.1Qui, come di seguito, indichiamo con P qualunque elemento appartenga a p, e con J qualunque elemento appartenga a
j. Si tenga conto che questo è un abuso di notazione (ad esempio, [P, P ] indica la parentesi di Lie tra due elementi qualunquedi p, anche diversi tra loro).
46 Capitolo 2. Gruppi di Lie
Definizione 2.5.3. Un’algebra di Lie è detta semisemplice se non è abeliana e se non possiede alcunideale abeliano proprio.
Un importante risultato che caratterizza le algebre semisemplici è dato dal seguente
Teorema 2.5.1. (secondo criterio di Cartan) Un’algebra di Lie è semisemplice se e solo se la suaforma di Killing è non degenere.
È possibile dare una definizione alternativa di semisemplicità facendo uso della nozione di ideale solubile.A questo scopo, consideriamo un’algebra di Lie g e poniamo{
g(0) := g
g(k) := span{
X ∈ g | X = [Y,Z] per qualche Y,Z ∈ g(k−1)}
k ≥ 1,
o più sinteticamente, con abuso di notazione,
g(k) = [g(k−1), g(k−1)] k ≥ 1.
Si ha1 g(0) ⊃ g(1) ⊃ · · · ⊃ g(k) ⊃ · · ·; in effetti, g(k) è un ideale di g per ogni k = 1, 2, . . ., come possiamodimostrare agilmente per induzione. Sfruttiamo l’identità di Jacobi per scrivere
[Z, [X,Y]︸ ︷︷ ︸∈ g(1)
] = −[X, [Y,Z]]− [Y, [Z,X]]︸ ︷︷ ︸∈ g(1)
∀X,Y,Z ∈ g,
da cui vediamo che la parentesi di Lie di qualunque elemento di g con qualunque elemento di g(1) ap-partiene a g(1) (che è pertanto un ideale). Per il passo induttivo, riscriviamo l’identità di cui sopra conX,Y ∈ g(k−1), k ≥ 2 e Z ∈ g per ottenere
[Z, [X,Y]︸ ︷︷ ︸∈ g(k)
] = −[X, [Y,Z]︸ ︷︷ ︸∈ g(k−1)
]− [Y, [Z,X]︸ ︷︷ ︸∈ g(k−1)
]
︸ ︷︷ ︸∈ g(k)
,
il che dimostra la tesi.Come corollario a questa dimostrazione possiamo osservare che la parentesi di Lie di due ideali di g èancora un ideale di g.
Definizione 2.5.4. Un’algebra di Lie g è detta solubile se ∃k : g(k) = {0}.
Definizione 2.5.5. Un’algebra di Lie g è semisemplice se non possiede alcun ideale solubile.
Mostriamo l’equivalenza delle definizioni 2.5.3 e 2.5.5. Chiaramente, se i è un ideale abeliano di g, allorai(1) è banale, e pertanto i è solubile; viceversa, se s è un ideale solubile di g, con s(k−1) non banale e s(k)
banale, allora s(k−1) è un ideale abeliano di g; pertanto, se c’è un ideale solubile deve esistere anche unideale abeliano, il che dimostra l’equivalenza delle definizioni.
Esempio
• L’algebra delle matrici triangolari superiori è solubile. Prendiamo ad esempio il caso delle matrici3× 3: si ha che
M ∈ gdef⇐⇒ M =
a b c0 d f0 0 g
a, b, c ∈ R;
è immediato mostrare che queste matrici sono nilpotenti, cioè si annullano se elevate a una potenzasufficientemente elevata (in questo caso, 4). In effetti, osserviamo che
A ∈ g(1) =⇒ A =
0 x y0 0 z0 0 0
1La notazione A ⊃ B è qui usata in senso di inclusione impropria, spesso indicata anche con A ⊇ B.
2.5. Studio delle algebre di Lie 47
per qualche x, y, z ∈ R, e
B ∈ g(2) =⇒ B =
0 0 s0 0 00 0 0
per qualche s ∈ R; quest’ultima algebra è un ideale abeliano di g (sicché g(3) = {0}).
Per completezza, enunciamo di seguito il
Teorema 2.5.2. (primo criterio di Cartan) Se g è un’algebra di Lie, vale che
g è solubile ⇐⇒ ∀X,Y ∈ g(1), B(X,Y) = 0.
D’ora in poi rivolgeremo la nostra attenzione alle algebre semisemplici; questo perché, data una qualunquealgebra g, posso sempre scrivere
g = i +sg′,
dove i è un ideale solubile di g, e posso pensare che g′ sia semisemplice (altrimenti scrivo anch’essa comesomma semidiretta fino a ridurmi a un’algebra semisemplice); d’altronde, gli ideali solubili possono esserestudiati con metodi semplici (in sostanza, possono essere ricondotti all’algebra delle matrici triangolarisuperiori), mentre la parte interessante è proprio quella semisemplice.
2.5.3 Studio delle algebre semisempliciAvevamo visto in precedenza che la forma di Killing di su(2) è definita negativa, mentre quella di so(2, 1)è indefinita. Questi esempi rappresentano casi particolari del seguente risultato generale.
Teorema 2.5.3. Se g è l’algebra di Lie di un gruppo compatto G, ed è semisemplice, allora la sua formadi Killing B è definita negativa.Viceversa, se il gruppo G è connesso e la forma sulla sua algebra g è definita negativa, allora G è compattoe g semisemplice.
Ci interessa studiare la struttura delle algebre semisemplici. Una prima caratterizzazione di queste algebreè data in termini di algebre semplici.
Definizione 2.5.6. Un’algebra di Lie g è detta semplice se non è abeliana e se non possiede alcun idealeproprio.
Osservazione 2.5.6. Se un’algebra è semplice è in particolare semisemplice, ma non vale il viceversa. Adesempio, l’algebra
g = su(3)⊕ su(2)
è semisemplice (la sua forma di Killing è non degenere e definita negativa), ma non è semplice (possiedei due ideali propri su(2) e su(3)).Vale il seguente
Teorema 2.5.4. Se un’algebra è semisemplice e non semplice, allora può essere decomposta in modounico come somma diretta di algebre semplici.
Quindi, la relazione tra semplicità e semisemplicità è compendiata dalla relazione
g semisemplice ⇐⇒ g =
k⊕j=1
gj con gj semplice ∀j e k ≥ 1
(se k = 1, g è anche semplice).È esclusa cioè l’eventualità che un’algebra g semisemplice ma non semplice sia del tipo g = g′ +
sg′′, dove
g′′ non è un ideale di g; cioè, se vale quella scrittura e g′ è un ideale, allora lo è anche g′′, e quindi èg = g′ ⊕ g′′.
48 Capitolo 2. Gruppi di Lie
Dimostrazione. Sia g un’algebra semisemplice ma non semplice. Allora esiste un suo ideale proprio g′.Sia ora g′′ il sottospazio di g definito da
g′′ := {X ∈ g |B(X,Y) = 0 ∀Y ∈ g′}
(una sorta di sottospazio ortogonale di g′). Si ha che
dim g′ + dim g′′ = dim g;
vale inoltre la seguente proprietà ∀X,Y,Z ∈ g:
B([X,Y],Z) = Tr(ad[X,Y] ◦ adZ) = Tr(adX ◦ adY ◦ adZ − adY ◦ adX ◦ adZ) =
se ora scelgo X ∈ g′′,Y ∈ g e Z ∈ g′, dato che g′ è un ideale sia che [Y,Z] ∈ g′, da cui, per definizione dig′′,
B(X, [Y,Z]) = 0 =⇒ B([X,Y],Z) = 0 =⇒ [X,Y] ∈ g′′,
cioè anche g′′ è un ideale.Inoltre, è un ideale anche g′ ∩ g′′, e si ha che
B(X,Y) = 0 ∀X,Y ∈ g′ ∩ g′′,
per definizione di g′′. Ma allora, per il teorema 2.5.2, g′ ∩ g′′ è un ideale solubile. Essendo g semisempliceper ipotesi, deve essere g′ ∩ g′′ = {0}, cosicché
g = g′ ⊕ g′′
come spazio vettoriale. Inoltre, se X ∈ g′ e Y ∈ g′′, allora [X,Y] ∈ g′ ∩ g′′ (entrambi sono ideali), da cui[X,Y] = 0. Quindi
g = g′ ⊕ g′′
come algebra di Lie. Se g′ e g′′ non sono entrambi semplici (contengono ideali propri), si reitera laprocedura e si arriva alla decomposizione
g = g1 ⊕ · · · ⊕ gn,
come bisognava dimostrare.
Esempi
• su(2) ha forma di Killing non degenere, quindi è semisemplice; in effetti, è anche semplice. Se cosìnon fosse, infatti, sarebbe decomponibile come somma di due algebre,
su(2) = g1 ⊕ g2,
di cui una delle due necessariamente 1-dimensionale; ma allora su(2) avrebbe un ideale abeliano, ilche non può essere data la semisemplicità.
• Allo stesso modo, si può mostrare che su(n) è semplice ∀n.
• Come abbiamo già visto nel caso n = 2,
u(n) = u(1)⊕ su(n),
e pertanto u(n) non è semisemplice (forma di Killing degenere).
• so(n):
– so(2) è abeliana (non semplice);– so(3) è semplice;– so(4) è un caso particolare (vedi sotto);– so(n) è semplice ∀n ≥ 5.
• Il gruppo di Poincaré non è semisemplice, dato che contiene l’ideale abeliano delle traslazioni.
2.5. Studio delle algebre di Lie 49
L’algebra so(4) e so(3, 1) Analizziamo più in dettaglio il caso di so(4). Questa è l’algebra delle matrici4× 4 reali antisimmetriche:
aT = −a,
e una sua base opportuna è:
T1 =
0 0 0 00 0 1 00 −1 0 00 0 0 0
T2 =
0 0 −1 00 0 0 01 0 0 00 0 0 0
T3 =
0 1 0 0−1 0 0 00 0 0 00 0 0 0
T4 =
0 0 0 −10 0 0 00 0 0 01 0 0 0
T5 =
0 0 0 00 0 0 −10 0 0 00 1 0 0
T6 =
0 0 0 00 0 0 00 0 0 −10 0 1 0
;
i commutatori di questi elementi valgono
[Ti, Tj ] = −ε kij Tk, [Ti, Tj+3] = −ε k
ij Tk+3, [Ti+3, Tj+3] = −ε kij Tk
con i, j = 1, 2, 3; in particolare, T1, T2 e T3 generano la sottoalgebra so(3) (e sono in effetti proprio glielementi di base di so(3) con l’aggiunta di una riga e una colonna nulle); passando alla base
T ′i :=1
2(Ti + Ti+3), T ′i+3 :=
1
2(Ti − Ti+3)
(sempre con i = 1, 2, 3), si trova che i commutatori sono diventati
[T ′i , T′j ] = −ε k
ij T′k, [T ′i , T
′j+3] = 0, [T ′i+3, T
′j+3] = −ε k
ij T′k+3,
dimodoché possiamo scrivereso(4) = so(3)⊕ so(3),
o equivalentemente so(4) = su(2)⊕ su(2).Questo mostra che so(4) è semisemplice (lo è so(3)), ma non semplice.Si può verificare che B(Ti, Ti+3) = 0.
Approfittiamone per analizzare anche l’analoga algebra so(3, 1), cioè l’algebra di Lorentz; questa è formatadalle matrici a tali che
aT = −gag−1 con g = diag(1, 1, 1,−1).
Si può dimostrare che una base di quest’algebra è data dall’insieme {Ti}6i=1, dove T1, T2 e T3 sono comequelle di so(4), mentre
T4 =
0 0 0 −10 0 0 00 0 0 0−1 0 0 0
T5 =
0 0 0 00 0 0 −10 0 0 00 −1 0 0
T6 =
0 0 0 00 0 0 00 0 0 −10 0 −1 0
,
e che i commutatori sono
[Ti, Tj ] = −ε kij Tk, [Ti, Tj+3] = −ε k
ij Tk+3, [Ti+3, Tj+3] = ε kij Tk.
Osserviamo da subito che i primi tre elementi generano ancora l’algebra so(3); a causa del segno positivodegli ultimi commutatori, tuttavia, non è possibile ripetere il procedimento usato per so(4) per separarel’algebra in due copie di so(3): per farlo, infatti, dovremmo introdurre la base
Sj := Tj , Sj+3 := iTj+3
50 Capitolo 2. Gruppi di Lie
(con j = 1, 2, 3), per poi passare a
S′j :=1
2(Sj + Sj+3), S′j+3 :=
1
2(Sj − Sj+3),
il che non è lecito perché dobbiamo attenerci alle combinazioni lineari reali degli elementi dell’algebra.Questo ci suggerisce che uno studio di una versione complessificata delle algebre può rivelarsi utile alloscopo di vedere due algebre altrimenti differenti come il medesimo oggetto. Questo è dunque quello checi proponiamo di fare.
2.5.4 Complessificazione delle algebre di Lie
Consideriamo un’algebra di Lie g generata dalla base {T1, . . . , Tn}; vogliamo definirne una complessifica-zione. A questo scopo, possono verificarsi due casi:
a) I vettori T1, . . . , Tn rimangono linearmente indipendenti anche se considerati sul campo complesso,cioè
λiTi = 0 =⇒ λi = 0 ∀i;
in questo caso, è semplice e naturale definire l’algebra complessificata g come l’algebra generata suicomplessi dai Ti:
g := {λiTi | (λi) ∈ Cn}.
Le parentesi di Lie vengono definite per bilinearità conoscendo le costanti di struttura di g:
[Ti, Tj ] = f kij Tk =⇒ [αiTi, β
jTj ] := αiβjf kij Tk ∀(αi), (βj) ∈ Cn.
Un esempio di questo caso è fornito da su(2), poiché le matrici di Pauli sono linearmente indipendentianche sui numeri complessi:
λiTi =1
2
(iλ3 λ2 + iλ1
−λ2 + iλ1 −iλ3
)=
(0 00 0
)=⇒ λ1 = λ2 = λ3 = 0.
b) I vettori T1, . . . , T3, linearmente indipendenti sui reali, sono invece linearmente dipendenti suicomplessi. Ad esempio,
sl2(C) = {a ∈ M2(C) | Tra = 0}
ammette la base naturale
T1 =
(1 00 −1
), T2 =
(0 10 0
), T3 =
(0 01 0
),
T4 =
(i 00 −i
), T5 =
(0 i0 0
), T6 =
(0 0i 0
),
e questi vettori non sono evidentemente indipendenti sui complessi (Tj+3 = iTj per j = 1, 2, 3). Inquesti casi, definiamo
Osservazione 2.5.8. Nel caso di sl2(C) avevamo la relazione di dipendenza
iTj = Tj+3 per j = 1, 2, 3;
con la definizione di g appena data, invece, si ha
i(Tj , 0) = (0, Tj) 6= (Tj+3, 0),
e in effetti i (Tj , 0) sono linearmente indipendenti.
Osservazione 2.5.9. Quando i {Tj} sono linearmente indipendenti anche su C (caso a)), la costruzione “acoppie” descritta nel punto b) equivale a quella descritta in a):
(X,Y)↔ X + iY è un isomorfismo.
Abbiamo così costruito la complessificazione g di g nel caso generale.
Viceversa, diamo la seguente
Definizione 2.5.7. Si dice forma reale di un’algebra di Lie complessa L un’algebra reale g tale cheg ∼ L .
Abbiamo già avuto modo di constatare che un’algebra complessa può possedere molte forme reali; adesempio, si ha che
so(4) ∼ so(3, 1),
e più in generaleso(n) ∼ so(p, n− p).
Anche per SU posso definire il gruppo
SU(p, q) := {U ∈ Mp+q(C) | U† = gU−1g−1,detU = 1}
(con g matrice diagonale di segnatura (p, q)), e la corrispettiva algebra
su(p, q) = {a ∈ Mp+q(C) |A† = −gAg−1,TrA = 0},
e si può dimostrare chesu(n) ∼ su(p, n− p).
La complessificazione permette dunque di raggruppare un insieme di differenti algebre reali in un’unicaalgebra complessa.Anche per le algebre complesse possiamo definire:
• la rappresentazione aggiunta ad : g→ End(g), data da
adX(Y) := [X,Y] ∀X,Y ∈ g;
• la forma di Killing B : g× g→ R, data da
B(X,Y) := Tr(adX ◦ adY) ∀X,Y ∈ g;
52 Capitolo 2. Gruppi di Lie
• le nozioni di semisemplicità e la semplicità, in termini di ideali dell’algebra complessa; valgonoancora i due criteri di Cartan (teoremi 2.5.1 e 2.5.2).
Inoltre vale il seguente
Teorema 2.5.5. Valgono le seguenti implicazioni:
a) g semisemplice ⇐⇒ g semisemplice;
b) g semplice =⇒ g semplice.
Dimostrazione. a) Si consideri una base {T1, . . . , Tn} di g, e la corrispettiva base {(T1, 0), . . . , (Tn, 0)}di g; dato che le costanti di struttura delle due algebre sono le medesime, si ha
Bg(Ti, Tj) = f lik f
kjl = Bg((Ti, 0), (Tj , 0));
pertanto, Bg è degenere se e solo se lo è Bg, da cui segue la tesi per il secondo criterio di Cartan(teorema 2.5.1).
b) Sia g semplice, e ipotizziamo per assurdo che g non lo sia; allora g possiede un ideale proprio i. Sia{T1, . . . , Tm} una sua base, e sia {T1, . . . , Tm, Tm+1, . . . , Tn} una base di g completata da quella dii; osserviamo che
[Ti, Tj ] = f kij Tk, 1 ≤ i ≤ m =⇒ f k
ij = 0 ∀k ≥ m+ 1,
in quanto [Ti, Tj ] deve essere un elemento di i per ogni Tj (per definizione di ideale). Nell’algebrag, il sistema {(T1, 0), . . . , (Tm, 0)} genera un ideale proprio i, dato che le costanti di struttura sonole stesse:
[(Ti, 0), (Tj , 0)] = f kij (Tk, 0), 1 ≤ i ≤ m =⇒ f k
ij (Tk, 0) ∈ i,
(dal momento che f kij = 0 ∀k ≥ m+ 1), ma un simile ideale non può esistere perché contraddice
l’ipotesi che g sia semplice.
Osservazione 2.5.10. A proposito di b), rileviamo esplicitamente che non vale l’implicazione inversa. Uncontroesempio è costituito dalle algebre so(4) e so(3, 1), dal momento che
so(4) = so(3, 1) = su(2)⊕ su(2),
(così come so(4) = su(2)⊕ su(2)), il che implica che so(3, 1) non è semplice, mentre so(3, 1) lo è.
Osservazione 2.5.11. Nel punto b) della dimostrazione, abbiamo sfruttato l’uguaglianza delle costanti distruttura per “trasportare” gli ideali di g a g; il viceversa non è invece possibile, in quanto non è dettoche un ideale di g sia generato da elementi della forma (Tj , 0). Ad esempio, abbiamo visto che l’algebraso(3, 1) contiene i due ideali generati da
1
2(Tj ,±Tj+3),
che non hanno corrispettivo in so(3, 1).
Ci proponiamo ora di studiare la struttura e la classificazione delle algebre di Lie complesse semisemplici.
2.5.5 Algebre complesse semisempliciDefinizione 2.5.8. Sia L un’algebra di Lie complessa semisemplice. Si dice sottoalgebra di Cartan diL una sua sottoalgebra H con le seguenti proprietà:
a) H è una sottoalgebra abeliana massimale, nel senso che
H ′ sottoalgebra abeliana di L =⇒ H ′ ⊂H ;
2.5. Studio delle algebre di Lie 53
b) la rappresentazione aggiunta adh è completamente riducibile ∀h ∈H , cioè può essere resa diagonalea blocchi scegliendo una base opportuna.
Si può dimostrare che ogni algebra complessa semisemplice ammette almeno una sottoalgebra di Cartan,e che inoltre tutte le sue sottoalgebre sono equivalenti a meno di un automorfismo. In particolare, tuttele sottoalgebre di Cartan di una data algebra hanno la medesima dimensione.Siamo quindi legittimati a dare la seguente
Definizione 2.5.9. Si dice rango di L la dimensione delle sue sottoalgebre di Cartan.
Scegliamo una sottoalgebra di Cartan H di L , e prendiamone una base {h1, . . . , hl}, con l rango diL . In virtù della proprietà b), è possibile effettuare un cambio di base che renda la rappresentazioneaggiunta adhj diagonale per j = 1, . . . , l. Pertanto, esiste una base {h1, . . . , hl; a1, . . . , an−l} di L (doven è la dimensione di L ) tale che:
si sono definiti per linearità gli n− l funzionali αj su H . Questi sono chiamati radici dell’algebra L .Osservazione 2.5.12. La rappresentazione adh è diagonale in questa base, ed è:
[adh] = diag(
0, . . . , 0︸ ︷︷ ︸l
, α1(h), . . . , αn−l(h)).
Osservazione 2.5.13. Nessuno degli αj può essere il funzionale nullo, poiché in questo caso sarebbe
[h, aj ] = 0 ∀h ∈H ,
e questo permetterebbe di estendere la sottoalgebra di Cartan, in contraddizione con la richiesta che siamassimale.Denotiamo l’insieme delle radici con ∆.
Definizione 2.5.10. Data una radice α, l’insieme degli elementi aα ∈ L tali che
[h, aα] = α(h)aα ∀h ∈H
è un sottinsieme di L detto sottospazio di radice relativo ad α, e viene denotato con il simbolo Lα.
Si ha così la scomposizione:L = H +
∑α∈∆
Lα.
Osservazione 2.5.14. È possibile vedere H come lo spazio L0, cioè il sottospazio relativo al funzionalenullo, inteso come radice. Infatti, si ha per definizione
[h, h′] = 0 ∀h ∈H ⇐⇒ h′ ∈H ;
si definisce in questo modo lo spazio “allargato” delle radici:
∆0 := ∆ ∪ {0}.
Evidenziamo alcune proprietà fondamentali che derivano da questa scomposizione.
• È possibile dimostrare chedim Lα = 1 ∀α ∈ ∆;
i sottospazi di radice sono tutti di dimensione uno (a differenza di H , che può avere dimensionemaggiore).
54 Capitolo 2. Gruppi di Lie
• Sia h ∈H e siano aα ∈ Lα, aβ ∈ Lβ ; allora, per l’identità di Jacobi, si ha:
[h, [aα, aβ ]] + [aα, [aβ , h]︸ ︷︷ ︸−β(h)aβ
] + [aβ , [h, aα]︸ ︷︷ ︸α(h)aα
] = 0
=⇒ [h, [aα, aβ ]] = (α(h) + β(h))[aα, aβ ],
cosicché, se l’elemento [aα, aβ ] è diverso da zero, allora α+ β è una radice, e [aα, aβ ] ∈ Lα+β .
• Se α+ β 6= 0, alloraB(aα, aβ) = 0;
infatti,
(adaα ◦ adaβ )(aγ) = [aα, [aβ , aγ ]]
{∈ Lα+β+γ se α+ β + γ ∈ ∆
= 0 se α+ β + γ /∈ ∆;
In generale, se α+ β 6= 0 vale che Lα+β+γ ∩Lγ = ∅, dato che sottospazi di radici diverse sono traloro disgiunti; nel primo caso, (adaα ◦ adaβ )(aγ) non ha parti proporzionali a aγ (ovvero diagonali),e perciò la matrice [adaα ◦adaβ ] è a traccia nulla se α+β 6= 0, mentre nel secondo caso (adaα ◦adaβ )è l’operatore nullo. In entrambi i casi, la forma di Killing non è nulla solo se α+ β = 0.
Si può osservare che il ragionamento sopra riportato vale in generale per α, β, γ ∈ ∆0. In particolare,
B(h, aα) = 0 ∀h ∈H ∀α ∈ ∆,
eB(aα, aα) = 0 ∀α ∈ ∆.
Pertanto, un elemento aα ∈ Lα può avere forma di Killing non nulla solo con un elemento deltipo a−α ∈ L−α; dato che L è semisemplice, la forma B deve essere non degenere, e quindi devenecessariamente esistere un tale elemento; in altre, parole, se α è una radice, lo è necessariamenteanche −α.
• La forma di Killing B è non degenere su H ; infatti, se fosse degenere, dovrebbe esistere un elementoh′ ∈H tale che
B(h′, h) = 0 ∀h ∈H ;
ma sappiamo cheB(h′, aα) = 0 α ∈ ∆,
e pertanto avremmo B(h′, ·) ≡ 0 su tutto L , e questo non può essere perché B deve essere nondegenere sull’algebra.
L’ultima osservazione ci dice che esiste una forma bilineare simmetrica non degenere sulla sottoalgebraH ; questo permette di stabilire una corrispondenza biunivoca tra tale spazio e il suo spazio duale H ∗,e anche di dotare H ∗, a sua volta, di una forma bilineare simmetrica non degenere.Infatti, sia α ∈ ∆; questa è per definizione un elemento di H ∗. Possiamo associare ad α l’elementohα ∈H tale che
α(h) = B(hα, h) ∀h ∈H ,
che esiste ed è unico.Definiamo inoltre la seguente forma su H ∗:
〈α, β〉 := B(hα, hβ) ∀α, β ∈H ∗;
questa è ovviamente simmetrica, bilineare e non degenere su H ∗.
2.5. Studio delle algebre di Lie 55
Esempi
• su(2) =: A1. Come abbiamo già visto, una sua base è data da {T1, T2, T3}, dato che questi sonolinearmente indipendenti anche sul campo complesso; abbiamo inoltre visto che
[adTi ] = ti,
dove si è indicato come ti l’i-esimo elemento della base di so(3).Una sottoalgebra di Cartan, come si può verificare, è data da
H := {λT3 | λ ∈ C};
infatti:
– H è una sottoalgebra abeliana:[λ1T3, λ2T3] = 0;
– H è massimale:[µiTi, λT3] = λ(µ1T2 − µ2T1),
e questo è nullo se e solo se µ1 = µ2 = 0;– La matrice di rappresentazione aggiunta
[adλT3 ] =
0 λ 0−λ 0 00 0 0
è diagonalizzabile.
Da questo vediamo che il rango di su(2) è 1.Osserviamo che
[h, T1 ± iT2] = ∓T2 ± iT1 = ±i(T1 ± iT2),
cioè si hanno le due radici α e −α, con:
α : α(h) = i;
i sottospazi di radice sono quindi
Lα = {t(T1 + iT2)}, L−α = {t(T1 − iT2)}.
È opportuno osservare che questa suddivisione di su(2) ricalca quella che in fisica è specificata (insu(2)) dagli operatori di momento angolare Jz (parte di Cartan) e J± (parte delle radici).Il rappresentante hα della radice α deve essere della forma
hα = µh,
essendo l’algebra di Cartan unidimensionale. Per definizione, si deve avere
Prima di calcolare h−α, svolgiamo una considerazione generale.
56 Capitolo 2. Gruppi di Lie
Osservazione 2.5.15. Vale la proprietà
hµiαi = µihαi ;
infatti,B(hµiαi , h)
def= (µiαi)(h) = µiαi(h)
def= µiB(hαi , h) = B(µihαi , h) ∀h,
da cui l’asserto perché B è non degenere.
Da questo osserviamo subito cheh−α = −hα.
Calcoliamo infine la “norma” delle due radici (che è la stessa):
〈α, α〉 = B(hα, hα) = α(hα) = iµ =1
2.
• su(3) =: A2. Questa algebra ammette una base naturale {Tj}8j=1, dove
Tj :=i
2λj ,
e le λj sono le cosiddette matrici di Gell-Mann:
λ1 =
0 1 01 0 00 0 0
λ2 =
0 −i 0i 0 00 0 0
λ3 =
1 0 00 −1 00 0 0
λ4 =
0 0 10 0 01 0 0
λ5 =
0 0 −i0 0 0i 0 0
λ6 =
0 0 00 0 10 1 0
λ7 =
0 0 00 0 −i0 i 0
λ8 =1√3
1 0 00 1 00 0 −2
.
Valgono le relazioni di commutazione
[λi, λj ] = 2if kij λk,
con
f 312 = 1,
f 714 = f 6
51 = f 624 = f 7
25 = f 534 = f 7
63 =1
2
f 845 = f 8
67 =
√3
2,
ed f è completamente antisimmetrico rispetto a tutti i suoi indici; tutti gli altri commutatori sononulli. Si dimostra che i Tj da noi definiti sono linearmente indipendenti sul campo complesso (eformano quindi effettivamente una base); si ha chiaramente
[Ti, Tj ] = −f kij Tk.
Si può mostrare che la forma di Killing su questa algebra è
B(Ti, Tj) = −3δij .
Si verifica che le matrici T3 e T8 generano una sottoalgebra di Cartan; poniamo dunque
Abbiamo così le sei radici {±α1,±α2,±α3}, ossia i funzionali definiti da
α1 : α1(h1) = i , α1(h2) = 0;
α2 : α2(h1) = − i2, α2(h2) =
i√
3
2;
α3 : α3(h1) =i
2, α3(h2) =
i√
3
2;
osserviamo in particolare che α3 = α1 + α2. Queste sono tutte le radici, dato che la dimensione disu(3) è 8, e la sottoalgebra di Cartan ha dimensione 2.Esplicitamente,
L±α1= {λ(T1 ± iT2)}, L±α2
= {λ(T6 ± iT7)}, L±α3= {λ(T4 ± iT5)}.
Cerchiamo ora hα1; scriviamo
hα1 = κ1h1 + κ2h2;
ricordando che α1(h) = hα1, abbiamo le due equazioni indipendentiα1(h1) = κ1B(h1, h1) +
=0
((((((κ2B(h2, h1) = −3κ1 = i
α1(h2) =((((((κ1B(h1, h2)
=0+ κ2B(h2, h2) = −3κ2 = 0
=⇒ hα1= − i
3h1.
Analogamente, si trova che
hα2 =i
6h1 − i
√3
6h2 hα3 = − i
6h1 − i
√3
6h3.
Esplicitamente
hα1=
1
6
1 0 00 −1 00 0 0
hα2=
1
6
0 0 00 1 00 0 −1
hα3=
1
6
1 0 00 0 00 0 −1
(2.5.2)
è immediato notare che hα3 = hα1+α2 = hα1 + hα2 .I prodotti delle radici sono:
〈α1, α1〉 =1
3, 〈α2, α2〉 =
1
3, 〈α3, α3〉 =
1
3,
〈α1, α2〉 = −1
6, 〈α1, α3〉 =
1
6, 〈α2, α3〉 =
1
6,
Possiamo osservare che le radici sono disposte in modo geometricamente regolare (interpretando iprodotti come prodotti scalari, dato che sono tutti reali): rappresentando i vettori hα su un piano,avendone fissato uno in modo arbitrario, i valori dei prodotti scalari impongono che essi si disponganosui vertici di un esagono. Aggiungendo anche la radice nulla (di molteplicità due), otteniamo un“ottetto”.
58 Capitolo 2. Gruppi di Lie
Osservazione 2.5.16. Possiamo compiere le seguenti osservazioni:
• Le radici sembrano stare in relazioni semplici tra loro (α3 = α1 + α2);
• i prodotti 〈αi, αj〉 sono reali, e anzi, razionali reali;
• 〈αi, αi〉 > 0 ∀i, il che ci permette di interpretare questo come norma dei vettori e disegnarli su Rl;
• la rappresentazione grafica delle radici ha una configurazione molto regolare.
Queste proprietà possono essere generalizzate. Enunciamo (senza dimostrazione) il seguente
Teorema 2.5.6. Valgono le seguenti proprietà:
a) α ∈ ∆ =⇒ −α ∈ ∆, e −α è l’unica radice proporzionale ad α;
b) α, β ∈ ∆ =⇒ 〈α, β〉 ∈ Q;
c) 〈α, α〉 > 0 ∀α ∈ ∆;
d) H è generata interamente dagli hα, α ∈ ∆;
e) scelta una base {hβ1 , . . . , hβl}, con β1, . . . , βl ∈ ∆, vale
α ∈ ∆ =⇒ α = κjβj con κj ∈ Q ∀j.
Questo ci porta a introdurre una sottoalgebra di Cartan reale definita da
HR := {λjhβj | λj ∈ R}
(che è il piano di cui abbiamo parlato sopra nel caso di su(3)).La forma di Killing è allora un prodotto interno su HR:
〈h, h〉 ≥ 0 ∀h ∈HR, 〈h, h〉 = 0 ⇐⇒ h = 0.
Posso quindi trovare in HR una base ortonormale {H1, . . . ,Hl} (con B(Hi, Hj) = δij), di modo che valga(∀hα ∈HR) la decomposizione ortonormale
Scegliamo una base {β1, . . . , βl} di HR; allora α ∈ ∆ =⇒ α = µjβj con (µj) ∈ Ql. Diamo la seguentedefinizione.
Definizione 2.5.11. Una radice α, scrivibile in una certa base di radici come α = µjβj è detta positivase il primo coefficiente µj diverso da zero è un numero positivo. In questo caso, scriviamo che α > 0.
L’insieme di tutte le radici positive è denotato con ∆+. Ovviamente, se α è una radice positiva, −α (cheè una radice) non lo è (diciamo che è negativa, e che −α ∈ ∆−). Si ha quindi che esattamente la metàdelle radici sono positive, l’altra metà negative1:
∆ = ∆+ ∪∆−, #∆+ = #∆−.
Definizione 2.5.12. Una radice α è detta semplice se è positiva e se non può essere scritta come α = β+γcon β, γ ∈ ∆+.
Può sembrare che le definizioni 2.5.11 e 2.5.12 siano prive di interesse, dal momento che dipendono dallascelta di una base. In realtà, si può vedere che il numero e la configurazione spaziale delle radici positivee semplici è indipendente dalla scelta della base (che si limita a “ruotare” lo spazio).Osserviamolo esplicitamente in su(3):
• base B1 := {α1, α2}; le radici positive sono ∆+ = {α1, α2, α3}, di cui sono semplici α1 e α2 (la terzaè la somma delle prime due);
• base B2 := {α1, α3}; le radici positive sono ∆+ = {α1,−α2, α3} (infatti −α2 = α1 − α3), di cuisono semplici −α2 e α3 (mentre α1 = −α2 + α3).
Riportando su un piano le radici trovate (e le loro opposte) si può notare che le configurazioni delle radicisono le medesime, eventualmente a meno di una rotazione.L’interesse delle radici semplici risiede nel seguente risultato.
Teorema 2.5.7. Se l’algebra complessa L ha rango l, L possiede l radici semplici indipendenti (salvocambiamenti di base); queste formano una base {α1, . . . , αl} di H ∗. Inoltre, se α ∈ ∆+, allora α = µjαjper qualche vettore (µj) di interi non negativi.
Da questo vediamo che viene naturale scegliere, come base privilegiata di un’algebra complessa semisem-plice, quella formata dalle sue radici semplici.Ad esempio, una base privilegiata di su(3) è quella formata da {α1, α2} (le radici semplici definiteprecedentemente).
Matrice di Cartan
Definizione 2.5.13. Le radici della forma β + kα, con α, β ∈ ∆ e k intero, costituiscono l’α-stringa diradici contenente β.
Vediamio che le radici tendono a organizzarsi in stringhe: più precisamente, vale il seguente
Teorema 2.5.8. Data un’algebra complessa e due radici α, β ∈ ∆, esistono due interi non negativi p, qtali che
β + kα ∈ ∆ ∀k : −p ≤ k ≤ q,
e
p− q = 2〈β, α〉〈α, α〉
(e questo numero è sempre un intero).
1Denotiamo con #A la cardinalità dell’insieme A.
60 Capitolo 2. Gruppi di Lie
Osservazione 2.5.17. Se α = β, p− q = 2; in caso contrario, vale la diseguaglianza di Schwartz:
|〈α, β〉|2 < 〈α, α〉〈β, β〉 =⇒ 4
∣∣∣∣ 〈β, α〉〈α, α〉
∣∣∣∣ ∣∣∣∣ 〈α, β〉〈β, β〉
∣∣∣∣ < 4,
per cui p− q può assumere solo i valori 0,±1,±2,±3.
Definizione 2.5.14. Sia {α1, . . . , αl} una base di radici semplici dell’algebra complessa L ; si definiscematrice di Cartan di L la matrice l × l A di componenti
Ajk = 2〈αj , αk〉〈αj , αj〉
.
Questa matrice ha dei 2 lungo la diagonale; per quanto riguarda le altre componenti, notiamo che ilprodotto tra radici semplici distinte è sempre negativo. Per dimostrarlo, osserviamo dapprima che
αj − αk 6∈ ∆;
infatti, se fosse αj−αk ∈ ∆+, si avrebbe αj = αk+(αj−αk), il che è impossibile perché αj è semplice; seinvece fosse αj−αk ∈ ∆−, si avrebbe αk = αj+(αk−αj), impossibile perché αk è semplice. Consideriamoadesso la αj-stringa contenente αk:
αk − pαj , . . . , αk + qαj ;
ma p = 0, perché questa stringa non deve contenere αk − αj , sicché
p− q = 2〈αj , αk〉〈αj , αj〉
= −q < 0,
da cui 〈αj , αk〉 < 0. Quindi Ajk ∈ {0,−1,−2,−3} ∀j 6= k.
L’interesse verso la matrice di Cartan è giustificato dal fatto che essa contiene tutte le informazioniriguardo all’algebra: nota la matrice di Cartan, è possibile ricostruire la dimensione dell’algebra, le radicisemplici, le costanti di struttura, ecc.Valgono cioè le seguenti proprietà:
a) la sottoalgebra di Cartan e l’insieme di radici ∆ specificano completamente (a meno di isomorfismi)l’algebra semisemplice L . Più specificamente, vale il seguente risultato.
Teorema 2.5.9. Se L ,L ′ sono due algebre complesse semisemplici di dimensione n e rango l, conH ,H ′ rispettive sottoalgebre di Cartan e ∆,∆′ rispettivi sistemi di radici, allora, se ϕ : H →H ′
è lineare e se vale inoltre α′(ϕ(h)) ∈ ∆ ∀α′ ∈ ∆′, allora ϕ può essere esteso a un isomorfismo dialgebre di Lie tra L e L ′.
b) Data la matrice di Cartan, è possibile costruire l’intero sistema di radici.
c) È possibile dare una classificazione completa di tutte le possibili matrici di Cartan.
Dal momento che ogni algebra semisemplice può essere scritta come somma diretta di algebre semplici,ci concentreremo su queste ultime.Per prima cosa, introduciamo i diagrammi di Dynkin di un’algebra, così definiti:
Definizione 2.5.15. Data un’algebra complessa semisemplice e la corrispettiva matrice di Cartan A, sidefinisce diagramma di Dynkin di quest’algebra il grafo costruito secondo le seguenti prescrizioni:
• A ogni radice semplice è associato un vertice;
• Il vertice corrispondente a αj e quello corrispondente a αk sono collegati da un numero di linee paria AjkAkj ;
2.5. Studio delle algebre di Lie 61
• Al vertice corrispondente a αj è associato il numero intero ωj definito da ω〈αj , αj〉, dove ω è sceltoin modo tale che
min{ω1, . . . , ωl} = 1.
A partire dal diagramma di Dynkin è possibile ricostruire l’intera algebra, perché esso contiene le indi-cazioni per costruire la matrice di Cartan (e viceversa). Infatti, se il vertice αj e il vertice αk non sonocollegati da linee, allora Akj = Ajk = 0; in caso contrario, se sono collegati da N linee, si ha che
ωjωk
=〈αj , αj〉〈αk, αk〉
=AkjAjk
=⇒ Ajk = −√AjkAkj
√AjkAkj
= −√N
√ωjωk.
2.5.6 Classificazione delle algebre complesseEsistono in totale quattro serie di algebre semplici complesse: Al,Bl,Cl,Dl (dove l è come al solito ilrango dell’algebra); più cinque algebre eccezionali chiamate E6,E7,E8,F4,G2. Di seguito, i diagrammi diDynkin di queste algebre.
1 1 1 1 2 2 2 1
1 1 1 2 1 1 1
1
1
Figura 2.1: da sinistra a destra, dall’alto verso il basso: le famiglie di algebre Al,Bl,Cl,Dl.
1 1 1 11
1
1 1 1 11
1
1
1 1 1 11
1
1 1
62 Capitolo 2. Gruppi di Lie
2 2 1 1 3 1
Figura 2.2: da sinistra a destra, dall’alto verso il basso: le algebre eccezionali E6, E7, E8,F4,G2.
I diagrammi delle algebre semisemplici si ottengono accostando i diagrammi delle loro componenti semplici(dal momento che queste componenti sono del tutto indipendenti).Osservazione 2.5.18. Valgono le seguenti osservazioni:
• A1 ∼ B1 ∼ C1;
• B2 ∼ C2;
• A3 ∼ D3;
• D2 ∼ A1 ⊕A1;
• A ,D e E hanno radici della stessa lunghezza.
Esempi
• L = A1.In questo caso, il rango è 1 (si tratta dell’algebra su(2)); il diagramma è semplicemente:
1
La matrice di Cartan è banalmente A =(2).
• L = A2.Il rango è 2, e il diagramma:
1 1
Siccome A12 = −√
1√
1 = A21, la matrice di Cartan è A =
(2 −1−1 2
). In effetti, abbiamo già visto
che le radici di A2 (cioè su(3)) soddisfano
A12 = 2〈α1, α2〉〈α1, α1〉
= 2−1/6
1/3= −1 = A21.
• L = A3.Si può mostrare che A3 = su(4). Il rango è 3, e il diagramma:
1 1 1
2.5. Studio delle algebre di Lie 63
Dato che le radici sono tutte della stessa lunghezza, la matrice di Cartan è simmetrica, e si ha:A12 = −
√1√
1 = −1
A13 = 0
A23 = −√
1√
1 = −1
=⇒ A =
2 −1 0−1 2 −10 −1 2
.
• L = A4.Si può mostrare che A4 = su(5). Il diagramma è:
1 1 1 1
La matrice di Cartan è:
A =
2 −1 0 0−1 2 −1 00 −1 2 −10 0 −1 2
.
In generale, si può intuire che la matrice di Cartan di Al sarà la matrice l× l con 2 sulla diagonale,−1 nelle caselle immediatamente adiacenti a un 2 e 0 altrove.
• L = G2.Il diagramma, come abbiamo già visto, è
3 1
La matrice di Cartan èA =
(2 −1−3 2
).
• L = B3.
Il diagramma è
2 2 1
La matrice di Cartan è
A =
2 −1 0−1 2 −10 −2 2
.
• L = C3. Il diagramma è
1 1 2
64 Capitolo 2. Gruppi di Lie
La matrice di Cartan è
A =
2 −1 0−1 2 −20 −1 2
.
Ora che sappiamo costruire la matrice di Cartan a partire dal diagramma di Dynkin, vediamo come siapossibile ricostruire l’algebra a partire dalla matrice di Cartan.Diamo prima la seguente
Definizione 2.5.16. Sia α ∈ ∆+, e sia α = µjαj con αj radici semplici. Il livello di α è il numero intero∑j
µj .
Esempio L = A3.
Come abbiamo già visto, la matrice di Cartan è
A =
2 −1 0−1 2 −10 −1 2
;
vi sono tre radici semplici (di livello 1) α1, α2, α3; cerchiamo le radici di livello 2 usando le stringhe diradici.Consideriamo l’α2-stringa passante per α1:
α1 + kα2, −p ≤ k ≤ q, p− q = 2〈α1, α2〉〈α2, α2〉
= A21 = −1;
dal momento che p = 0, si ha che q = 1; ossia
α1 + α2 è una radice.
L’α3-stringa passante per α1
α1 + kα3
non ci fornisce niente di nuovo, in quanto p− q = −q = 0 = 〈α1, α3〉.L’α3-stringa passante per α2
α2 + kα3
ci fornisce la radice α2 + α3. Per trovare l’ultima radice, dobbiamo salire al terzo livello.A questo scopo, notiamo che la stringa
α1 + α2 + kα1
non può fornirci nulla di nuovo, in quanto già compresa in α2 + kα1 (e lo stesso vale per α1 + α2 + kα2).Invece, la stringa
α1 + α2 + kα3
ci fornisce la radice α1 + α2 + α3. Esaminando tutte le stringhe rimanenenti, troviamo che non vi sononuove radici né al livello 3 né al livello 4.L’insieme delle radici positive è pertanto
Questo metodo può sempre essere applicato; i prodotti delle radici semplici si trovano immediatamente:
〈α2, α2〉 = 〈α3, α3〉 = 〈α1, α1〉 =1
4(vd. diagramma di Dynkin);
〈α1, α2〉 =1
2〈α1, α1〉A12 = −1
8;
〈α1, α3〉 =1
2〈α1, α1〉A13 = 0;
〈α2, α3〉 =1
2〈α1, α1〉A23 = −1
8.
Tutti gli altri prodotti si ricavano per linearità.Conoscere i prodotti tra le radici fornisce le informazioni necessarie per “disegnarle” nello spazio HR (ossiaRl).Vi sono l norme indipendenti 〈αi, αi〉, più 1
2 l(l − 1) prodotti misti indipendenti 〈αi, αj〉, i < j, per untotale di 1
2 l(l + 1) prodotti di radici indipendenti. Questo numero equivale in effetti alle l2 scelte dicoordinate per le αi, meno le 1
2 l(l − 1) rotazioni di Rl.
Ricapitoliamo quanto visto finora.
• L ha una sottoalgebra H di dimensione l che è abeliana.
• Vi sono 12 (n− l) sottospazi di radici Lα con α ∈ ∆+ e altrettanti (e corrispettivi) sottospazi L−α.
66 Capitolo 2. Gruppi di Lie
• Conosciamo i commutatori tra gli elementi h ∈HR e ogni elemento aα ∈ Lα:
[h, aα] = α(h)aα;
se usiamo {hα1, . . . , hαl} come base di HR (con α1, . . . , αl radici semplici), allora
j=1,...,l, caratterizzata dalle relazioni di commutazione di cui sopra, si adottala cosiddetta forma canonica di Weyl dell’algebra L .Naturalmente, è possibile lavorare con una base qualunque (anche se questa possiederà in generale pa-rentesi di Lie più complicate); un’altra scelta piuttosto frequente è costituita dalla forma di Chevalley{Hαj , E±α}, dove
Hαj :=2
〈αj , αj〉hαj B(Eα, E−α) :=
2
〈α, α〉;
in questa base, le costanti di struttura sono tutte intere.
2.5. Studio delle algebre di Lie 67
2.5.7 Forme reali compatteRicordando la definizione 2.5.7 di forma reale di un’algebra complessa, enunciamo il seguente
Teorema 2.5.10. Ogni algebra di Lie complessa semisemplice L possiede una e una sola forma realecompatta LC (a meno di isomorfismi). Se {hαj , e±α} è la base canonica di Weyl, allora gli elementi
ihαj j = 1, . . . , l
eα + e−αα ∈ ∆+
i(eα − e−α)
formano una base di LC .
Dimostrazione. Diamo solo un cenno della dimostrazione.
• Le costanti di struttura, con questa base, sono reali. Ad esempio,
Usiamo la base ortonormale {H1, . . . ,Hl} di H al posto di {hα1 , . . . , hαl}, cosicché B(Hi, Hj) = δij ,e poniamo zα := xα + iyα. Allora
a = iηjHj +∑α∈∆+
[zαeα + zαe−α
]con ηj ∈ R;
ricordando che B(eα, eβ) = 0 ogni volta che β 6= −α, abbiamo che
B(a, a) = −ηjηkB(Hj , Hk) + 2∑α∈∆+
zαzαB(eα, e−α)︸ ︷︷ ︸=−1
=
= −ηjηj − 2∑α∈∆+
|zα|2 ≤ 0 e = 0 ⇐⇒ a = 0,
cioè B è non degenere e definita negativa.
Di seguito elenchiamo le forme reali compatte delle algebre dei gruppi classici di matrici:
Al −→ su(l + 1)
Bl −→ so(2l + 1)
Cl −→ sp(l)
Dl −→ so(2l)
Osservazione 2.5.19. so(3) ∼ su(2) deriva dal fatto che, come già osservato in precedenza, A1 ∼ B1.
Osservazione 2.5.20. Allo stesso modo, da D2 ∼ A1 ⊕A1 deriva so(4) ∼ su(2)⊕ su(2).
68 Capitolo 2. Gruppi di Lie
2.5.8 Rappresentazione delle algebre semisempliciSia L un’algebra complessa semisemplice e sia Γ una sua rappresentazione di dimensione d (cioè, intermini di matrici d× d).Gli elementi della base di LC , che sono in particolare elementi di L , sono rappresentati dalle matrici
Γ(ihαj ) j = 1, . . . , l
Γ(eα + e−α)α ∈ ∆+
Γ(i(eα − e−α))
;
prendendo combinazioni lineari a coefficienti reali di queste matrici, si ottiene una rappresentazione diLC .Vale la seguente proprietà fondamentale (di cui non daremo la dimostrazione, peraltro complicata):
Teorema 2.5.11. Ogni rappresentazione di un gruppo di Lie compatto è equivalente a una rappresenta-zione unitaria (cioè una rappresentazione in termini di matrici unitarie).
Qui con “equivalente” si intende che esiste una base in cui gli elementi della rappresentazione sono matriciunitarie. Corrispondentemente, la rappresentazione dell’algebra può essere effettuata mediante matriciantihermitiane; pertanto, esiste una base in cui(
Γ(ihαj ))†
= −Γ(ihαj ),(Γ(eα + e−α)
)†= −Γ(eα + e−α),
(Γ(i(eα − e−α))
)†= −Γ(i(eα − e−α)).
Questo implica che(Γ(ihαj )
)†= −Γ(ihαj ),
(Γ(eα)
)†= −Γ(eα).
Osservazione 2.5.21. Da un lato, si ha (usiamo hβ , eα, ecc. per denotare le corrispettive matrici rappre-sentative Γ(hβ),Γ(eα), ecc.):
[hβ , eα]† = (
∈R︷ ︸︸ ︷α(hβ))∗e†α = α(hβ)e†α;
d’altra parte,[hβ , eα]† = [e†α, h
†β ] = [e†α, hβ ],
cioè[hβ , e
†α] = −α(hβ)e†α,
da cuie†α ∈ L−α.
Vediamo che ∀h ∈HR, Γ(h)† = Γ(h); inoltre,
[Γ(h),Γ(h′)] = 0 ∀h, h′ ∈HR,
perciò tutte le matrici Γ(h), h ∈ HR sono simultaneamente diagonalizzabili; in particolare, possiamodiagonalizzare contemporaneamente le Γ(hαj ). Notiamo che tutti gli autovalori sono reali, il che giustifical’esistenza dello spazio di Cartan (se come Γ usiamo la rappresentazione aggiunta ad, gli autovalori deifunzionali radice sono tutti reali).Passando a combinazioni lineari complesse delle Γ(hαj ) possiamo concludere che
∀h ∈H ,Γ(h) è diagonalizzabile.
D’ora in avanti, pertanto, prenderemo sempre Γ(h) diagonale ∀h.
Generalizziamo il concetto di “radice” introducendo quello di peso.Al variare di h ∈ H , l’elemento diagonale
(Γ(h)
)jj
=: Γjj(h) definisce un funzionale su H (per ognij = 1, . . . , l), ossia
Γjj : H → C;
2.5. Studio delle algebre di Lie 69
questi funzionali lineari sono detti pesi della rappresentazione Γ. Nel caso Γ = ad, i pesi sono proprio leradici (ivi compresa la radice nulla di molteplicità l).Dato che Γjj ∈H ∗, nello spazio H esistono i corrispettivi vettori:
Λ peso =⇒ Λ(h) =: B(hΛ, h) ∀h ∈H
per qualche hΛ ∈H ; questo ci permette di definire i prodotti tra un peso e una radice:
〈Λ, α〉 := B(hΛ, hα).
Dal momento che le Γ(hαj ) hanno autovalori reali, i pesi Λ(h) sono reali ∀h ∈HR, proprio come le radici:anche i pesi, perciò, possono essere “disegnati” nello spazio HR (ossia Rl).Con una base ortonormale {H1, . . . ,Hl}, posso pensare a Λ come a un vettore di Rl:
Λ :=(Λ1, . . . ,Λl
):=(Λ(H1), . . . ,Λ(Hl)
).
Valgono le seguenti proprietà (che generalizzano alcune proprietà delle radici):
a) ogni peso Λ può essere scritto come
Λ = µjαj con αj radici semplici e µj ∈ Q ∀j;
b) per ogni peso Λ, per ogni radice α, la quantità
2〈Λ, α〉〈α, α〉
è un numero intero;
c) è possibile definire l’α-stringa di pesi contenente Λ come nel caso delle radici, ossia, se Λ è un pesoe α è una radice, allora è un peso anche
Λ + kα con − p ≤ k ≤ q, p− q = 2〈Λ, α〉〈α, α〉
, p, q ∈ N0.
A differenza delle radici non nulle, i pesi possono anche coincidere tra loro, e pertanto gli spazi di pesipossono avere dimensione maggiore di 1.
Esempio
• L = A1 = su(2).
– Consideriamo la rappresentazione Γ di dimensione 2; questa è chiamata la rappresentazionefondamentale di A1.Avevamo già visto (2.5.1) che hα = 1
4
(1 00 −1
); i pesi sono dunque:
Λ1(hα) =1
4; Λ−1(hα) = −1
4
Dal momento cheα(hα) = 〈α, α〉 =
1
2,
si ottiene
Λ1 =1
2α, Λ−1 = −Λ1 = −1
2α.
– La rappresentazione di dimensione 3 di A1 è la rappresentazione aggiunta, e pertanto i pesisono le radici:
Λ1 = α, Λ2 = 0, Λ3 = −α.
70 Capitolo 2. Gruppi di Lie
• L = A2 = su(3).
– Consideriamo la rappresentazione fondamentale (di dimensione 3); come avevamo calcolato in(2.5.2), si ha
hα1 =1
6diag(1,−1, 0); hα2 =
1
6diag(0, 1,−1);
I pesi sono dunque Λ1(hα1) =
1
6, Λ1(hα2) = 0;
Λ2(hα1) = −1
6, Λ2(hα2
) =1
6;
Λ3(hα1) = 0, Λ3(hα2
) = −1
6
e sono tutti diversi (non c’è degenerazione). Richiamando a mente le radici di A2, si può vederefacilmente che
Λ1 =2
3α1 +
1
3α2, Λ2 = −1
3α1 +
1
3α2, Λ3 = −1
3α1 −
2
3α2;
notiamo che Λ2 = Λ1 − α1, Λ3 = Λ1 − α1 − α2.
Consideriamo ora l’autovettore |ψ〉 corrispondente a un certo peso Λ:
h|ψ〉 = Λ(h)|ψ〉
(dove h indica più propriamente Γ(h)), e consideriamo l’elemento di base eα ∈ Lα, con α ∈ ∆. Allora
ciò significa che, a meno che eα|ψ〉 = 0, Λ + α è un peso con autovettore eα|ψ〉.Si può dimostrare che esiste un unico autovettore |ψ〉 tale che eα|ψ〉 = 0 ∀α ∈ ∆+. Il peso corrispondentea questo particolare autovettore |ψ〉 è detto highest weight (“peso più alto”) della rappresentazione.
N.B. Il lettore avrà notato che questa è la stessa costruzione che si opera in meccanica quantisticaper trovare lo spettro del momento angolare. In quel caso particolare, l’algebra di Cartan corrispondeall’autospazio di Jz, gli spazi di radici a quelli di J± e l’highest weight lo stato |l l〉, tale che J+|l l〉 = 0.Da questo si costruiscono poi gli altri autostati di Jz applicando iterativamente J− a |l l〉.
Torniamo alla rappresentazione fondamentale di A1; in questo caso l’highest weight è Λ1, perché Λ1 + αnon è un peso (l’altro peso, Λ2, è il lowest weight).Mostriamo esplicitamente che |ψ〉 viene annullato da eα:
eα ∈ Lα = {(T1 + iT2)t} =⇒ eα ∝(
0 10 0
);
=⇒ eα|ψ〉 =
(0 10 0
)(10
)=
(00
),
appunto.Similmente, nel caso della rappresentazione fondamentale di A2, l’highest weight deve essere Λ1, dato cheΛ2 = Λ1 − α1 e Λ3 = Λ2 − α2; esplicitamente,
eα1= {t(T1 + iT2)}, eα2
= {t(T6 + iT7)}
2.5. Studio delle algebre di Lie 71
=⇒
eα1|ψ〉 =
0 1 00 0 00 0 0
100
= 0
eα2|ψ〉 =
0 0 00 0 10 0 0
100
= 0
.
Per dare la definizione precisa di highest weight, dobbiamo prima definire una relazione d’ordine tra ipesi.
Definizione 2.5.17. Dati due pesi Λ e λ di una rappresentazione di un’algebra L , si dice che
Λ > λ
se Λ− λ è positivo, cioè se Λ− λ si scrive come una combinazione lineare di radici di L µjαj e il primocoefficiente non nullo della combinazione è positivo.
Questa nozione di ordinamento istituisce una gerarchia tra i pesi.
Definizione 2.5.18. Se Λ è un peso della rappresentazione Γ tale che
Λ > λ
per ogni altro peso λ della rappresentazione, si dice che Λ è l’highest weight di Γ.
Valgono le seguenti proprietà per l’highest weight Λ.
a) Λ è non degenere;
b) ogni altro peso λ della rappresentazione ha la forma
λ = Λ− µjαj
dove αj sono radici semplici e µj numeri interi non negativi;
c) Λ determina univocamente la rappresentazione.
Vediamo come si possano classificare tutte le rappresentazioni di una data algebra L a partire dalla suamatrice di Cartan.
Definizione 2.5.19. Detta A la matrice di Cartan dell’algebra L di rango l e αj le sue radici semplici(j = 1, . . . , l), gli elementi
Λj := αk(A−1)kj , j = 1, . . . , l
sono detti pesi fondamentali di L .
Osservazione 2.5.22. Osserviamo che
2〈Λj , αk〉〈αk, αk〉
= 2〈αp, αk〉(A−1)pj〈αk, αk〉
= Akp(A−1)pj = δkj .
L’importanza dei pesi fondamentali è mostrata dal seguente
Teorema 2.5.12. Per ogni rapprestazione irriducibile di L , l’highest weight risulta pari a
Λ = njΛj per qualche (nj) ∈ (N0)l,
i Λj essendo i pesi fondamentali di L . Inoltre, a ogni vettore (nj) ∈ (N0)l corrisponde una rappresenta-zione di L il cui highest weight è pari a njΛj.
72 Capitolo 2. Gruppi di Lie
Il teorema permette di individuare ciascuna rappresentazione tramite un vettore di l interi non negativi:una rappresentazione di un’algebra di rango l verrà quindi scritta come
Γ(n1, . . . , nl);
i numeri n1, . . . , nl vengono chiamati Dynkin labels (“etichette di Dynkin”).
Osservazione 2.5.23. Se Λ = njΛj indica l’highest weight, usando l’osservazione 2.5.22, si ha che
〈Λ, αk〉 = nj〈Λj , αk〉 =1
2njδjk〈αk, αk〉 =
1
2nk〈αk, αk〉 =⇒ nk = 2
〈Λ, αk〉〈αk, αk〉
.
Esempi
• A1
La matrice di Cartan è banalmente A =(2), da cui il peso fondamentale Λ1 = 1/2; le rappresenta-
zioni sono caratterizzate dagli highest weight Λ = nΛ1, con n = 0, 1, 2, . . .
– Γ(0): è la rappresentazione banale (Λ = 0) di dimensione 1.
– Γ(1): in questo caso
Λ = Λ1 =1
2α;
Questa rappresentazione contiene i due pesi λ1 = Λ e λ2 = Λ − α = − 12 α, che riconosciamo
come i pesi della rappresentazione fondamentale (di dimensione 2).
– Γ(2): si haλ1 = Λ = 2Λ1 = α;
vi sono altri due pesi, cioè λ2 = Λ − α = 0 e λ3 = Λ − 2α = −α, che sono i pesi dellarappresentazione aggiunta (le due radici simmetriche più la radice nulla). La dimensione dellarappresentazione è dunque 3.
– Γ(n): in questo caso
λ1 = Λ = nΛ1 =n
2α;
oltre all’highest weight, si trovano i pesi
λ2 = Λ− α =(n
2− 1)α,
λ3 = Λ− 2α =(n
2− 2)α,
...
λn = Λ− nα = −n2α;
infatti, questi sono i pesi costituenti l’α-stringa Λ + kα per −p ≤ k ≤ q e p− q = 2 〈Λ,α〉〈α,α〉 = n,dal momento che q = 0 (Λ è l’highest weight), cioè p = n.Pertanto, la dimensione di Γ(n) è n + 1 (non c’è degenerazione sugli spazi dei pesi). Inoltre,possiamo osservare che il diagramma (unidimensionale) dei pesi è simmetrico rispetto allo 0.In fisica, si parla a volte di carica della rappresentazione di su(2) riferendosi alla quantitàJ = n/2.
2.5. Studio delle algebre di Lie 73
• A2
La matrice di Cartan è
A =
(2 −1−1 2
)=⇒ A−1 =
(2/3 1/31/3 2/3
);
i pesi fondamentali sono perciò Λ1 =
2
3α1 +
1
3α2
Λ2 =1
3α1 +
2
3α2
,
e le rappresentazioni sono del tipo Γ(n1, n2); vediamone alcune.
– Γ(0, 0): è ovviamente la rappresentazione banale.– Γ(1, 0): l’highest weight è
Λ = Λ1 =2
3α1 +
1
3α2;
riconosciamo in Λ l’highest weight della rappresentazione fondamentale (3-dimensionale) di A2,i cui pesi sono λ1 = Λ, λ2 = Λ− α1, λ3 = Λ− α1 − α2.
– Γ(1, 1): qui abbiamoΛ = Λ1 + Λ2 = α1 + α2,
che è l’highest weight della rappresentazione aggiunta (di dimensione 8). In questo caso èpresente una degenerazione sugli spazi dei pesi: infatti, sappiamo che la sottoalgebra di Cartan,che non è altro che lo spazio relativo al peso 0 (radice nulla), ha dimensione 2.
– Γ(0, 1): vedremo a breve che questa è una rappresentazione 3-dimensionale, la cosiddettacomplessa coniugata della Γ(1, 0).
– . . .
Nei casi precedenti, ci siamo imbattuti in rappresentazioni che avevamo già studiato oppure molto semplicida studiare (come le Γ(n) di A1); vogliamo trovare dei metodi generali che ci permettano di ricostruireil diagramma dei pesi di una rappresentazione qualsiasi, e in particolare trovare la dimensione di talerappresentazione.A tale proposito, enunciamo un risultato generale che permette di trovare la dimensione di una rappre-sentazione qualunque.
Teorema 2.5.13. (formula di Weyl) Sia Γ la rappresentazione di un’algebra di Lie L ; allora
dim Γ =∏α∈∆+
〈Λ + δ, α〉〈δ, α〉
,
dove Λ è l’highest weight di Γ e
δ :=1
2
∑α∈∆+
α.
Usando questa formula, si trova
A1 : dim Γ(n) =〈Λ + δ, α〉〈δ, α〉
=
⟨n2 α, α
⟩⟨12 α, α
⟩ + 1 = n+ 1
(come avevamo già trovato prima), nonché
A2 : Λ = n1Λ1 + n2Λ2 = (2n1 + n2)α1
3+ (2n2 + n1)
α2
3,
δ =1
2(α1 + α2 + (α1 + α2)) = α1 + α2
=⇒ dim Γ(n1, n2) =
(〈Λ, α1〉〈δ, α1〉
+ 1
)(〈Λ, α2〉〈δ, α2〉
+ 1
)(〈Λ, α1 + α2〉〈δ, α1 + α2〉
+ 1
)= (n1 + 1)(n2 + 1)
(n1 + n2
2+ 1
).
74 Capitolo 2. Gruppi di Lie
Applicando quest’ultima formula, troviamo:
dim Γ(1, 0) = 2 · 1 · 3/2 = 3 = dim Γ(0, 1);
dim Γ(1, 1) = 2 · 2 · 2 = 8;
dim Γ(2, 0) = 3 · 1 · 2 = 6 = dim Γ(0, 2);
. . .
Passiamo ora alla costruzione del diagramma dei pesi; benché non esista un metodo algoritmico generaleche consenta di ricavare tutti i pesi di una qualunque rappresentazione, vi sono alcuni strumenti di cui cisi può servire:
• le stringhe di pesi (a partire dall’highest weight e scendendo);
• le riflessioni di Weyl;
• l’individuazione delle rappresentazioni complesse coniugate.
Abbiamo già visto come ricavare nuovi pesi tramite le stringhe; illustriamo brevemente gli altri duemetodi.
Riflessione di Weyl
Si può dimostrare che se λ è un peso di una certa rappresentazione Γ di L , allora è un peso anche
Sαλ := λ− 2〈λ, α〉〈α, α〉
α
per ogni radice α di L ; inoltre, λ e Sαλ hanno la stessa molteplicità.L’operazione Sα è detta riflessione di Weyl, e può essere interpretata geometricamente come la riflessionerispetto al piano perpendicolare alla radice α.
Rappresentazione complessa coniugata
Come abbiamo visto, una base di LC (forma reale compatta dell’algebra L ) è data da {ihαj , eα +
e−α, i(eα− e−α)}α∈∆+
j=1,...,l; indichiamo gli elementi di questa base con a1, . . . , an; questi verificano relazionidi commutazione del tipo
[ai, aj ] = f kij ak
con f kij costanti di struttura reali.
Data una rappresentazione Γ di L , si ha evidentemente [Γ(ai),Γ(aj)] = f kij Γ(ak); definiamo, a partire
da Γ, la rappresentazione Γ∗ di LC così definita:
Γ∗(ai) :=(Γ(ai)
)†;
questa è in effetti una rappresentazione in quanto
[Γ∗(ai),Γ∗(aj)] = f k
ij Γ∗(ak)
(dal momento che le costanti di struttura sono reali: f kij = f k
ij ).La rappresentazione Γ∗ può essere estesa all’intera L definendo la regola di linearità
Γ∗(µjaj) := µjΓ∗(aj)
per ogni elemento µjaj ∈ L ; si badi bene che i coefficienti (complessi) µj vengono portati fuori senzaconiugazione complessa, come deve essere perché continuino a valere le giuste relazioni di commutazionetra gli elementi della rappresentazione.La rappresentazione Γ∗ viene chiamata rappresentazione complessa coniugata di Γ (anche se, per come èstata definita la regola di linearità, non è vero che Γ∗(h) sia la coniugata hermitiana di Γ(h)).Può accadere che la coniugazione non porti a niente di nuovo, e cioè che sia Γ∗ ∼ Γ; in questo caso, Γviene chiamata:
2.5. Studio delle algebre di Lie 75
• reale, se è equivalente a una rappresentazione in termini di matrici reali;
• pseudoreale, in caso contrario.
Notiamo cheiΓ∗(hαj ) = Γ∗(ihαj ) =
(Γ(ihαj )
)†=(iΓ(hαj )
)†=
= −i(Γ(hαj )
)†︸ ︷︷ ︸matr. hermitiana (diagonale)
= −iΓ(hαj ),
da cuiΓ∗(hαj ) = −Γ(hαj ),
e per linearitàΓ∗(h) = −Γ(h) ∀h ∈HR;
questo significa che i pesi di Γ∗ sono gli opposti di quelli di Γ, con la medesima molteplicità: il diagrammadei pesi viene riflesso rispetto all’origine.Pertanto, una rappresentazione coincide con la propria coniugata se e solo se il suo diagramma dei pesiè invariante rispetto alla simmetria centrale αj 7→ −αj , j = 1, . . . , l. Ad esempio, la rappresentazioneaggiunta di A2 Γ(1, 1) coincide con la propria complessa coniugata, mentre Γ(1, 0) no (è possibile mostrareche
(Γ(1, 0)
)∗= Γ(0, 1).
Appare inoltre immediato che(Γ∗)∗
= Γ.
L’effetto della coniugazione complessa su una rappresentazione irriducibile di un’algebra è stato stu-diato per tutte le algebre esistenti: è possibile dimostrare che valgono le seguenti (di seguito, Γ è unarappresentazione irriducibile di L ):
Teorema 2.5.14. • se L è Bl, o Cl, o Dl con l pari, o E7, o E8, o F4, o G2, allora Γ∗ ∼ Γ;
• se L è Al, allora(Γ(n1, n2, . . . , nl−1, nl)
)∗ ∼ Γ(nl, nl−1, . . . , n2, n1);
• se L è Dl con l dispari, allora(Γ(n1, n2, . . . , nl−1, nl)
)∗ ∼ Γ(n1, n2, . . . , nl, nl−1);
• se L è E6, allora(Γ(n1, . . . , n6)
)∗ ∼ Γ(n5, n4, n3, n2, n1, n6).
Facciamo un esempio sulla costruzione del diagramma dei pesi.
Esempio Prendiamo ancora l’algebra A2, e consideriamo la sua rappresentazione Γ(2, 0). Come abbiamovisto, la dimensione di questa rappresentazione è 6, e l’highest weight è Λ = 2Λ1 = 4
3 α1 + 23 α2.
Per trovare i pesi, consideriamo l’α-stringa Λ + kα1; k deve variare tra −p e 0, con
p = 2〈Λ, α1〉〈α1, α1〉
= n1 = 2;
in questo modo, troviamo i due nuovi pesi
λ2 = Λ− α1, λ3 = Λ− 2α1.
Un semplice calcolo mostra che Sα2Λ = Λ (niente di nuovo), mentre otteniamo due nuovi pesi calcolando
λ4 = Sα2λ2 = Λ− α1 − 2
〈Λ− α1, α2〉〈α2, α2〉
α2 = Λ− α1 − α2,
λ5 = Sα2λ3 = Λ− 2α2 − 2
〈Λ− 2α1, α2〉〈α2, α2〉
α2 = Λ− 2α1 − 2α2.
È chiaro da considerazioni di simmetria che l’ultimo peso deve essere λ6 = Λ−α1−2α2: questo può essereottenuto a partire dall’α2-stringa passante per Λ − 2α1, o anche come riflessione di Weyl di λ4 rispettoalla radice α2.
76 Capitolo 2. Gruppi di Lie
Osservazione 2.5.24. Notiamo che la simmetria del diagramma dei pesi si traduce nella proprietà
6∑i=1
λi = 0.
Questa è una proprietà generale: la somma di tutti i pesi di una rappresentazione dà sempre 0. Questoimplica che, dati tutti i pesi tranne uno, questo può essere ricavato automaticamente.Possiamo dimostrare agilmente questa proprietà. Scegliamo la base canonica (di Weyl) dell’algebra,cosicché
quindi gli elementi di L sono rappresentati da matrici a traccia nulla, e in particolare
Tr Γ(h) = 0 ∀h ∈H ,
e poiché sulla diagonale di Γ ci sono proprio i pesi, questo dimostra l’asserzione.
Diamo la seguente
Definizione 2.5.20. Dato un peso λ = Λ− µjαj , dove αj sono radici semplici, si dice livello del peso ilvalore intero
l∑j=1
µj .
Questo istituisce una gerarchia tra i pesi: in particolare, l’highest weight è l’unico peso di livello 0.
Diamo la seguente formula per ricavare in modo ricorsivo la molteplicità di un peso qualunque.
Lemma 2.5.15. (formula di ricorrenza di Freudenthal) Se λ è un peso di una rappresentazione,allora la molteplicità m(λ) di λ può essere ricavata a partire da(
〈Λ + δ,Λ + δ〉 − 〈λ+ δ, λ+ δ〉)m(λ) = 2
∑α∈∆+
∑k
m(λ+ kα)〈λ+ kα, α〉,
dove
δ =1
2
∑α∈∆+
α
e la seconda somma corre su tutti i valori di k tali che λ+ kα è un peso il cui livello è minore di quellodi λ.
Data la sua natura prettamente ricorsiva, la formula di Freudenthal si presta facilmente a essere imple-mentata in un algoritmo e computata da un calcolatore.
2.5. Studio delle algebre di Lie 77
2.5.9 Prodotti di rappresentazioni
Consideriamo un’algebra di Lie reale g con gruppo di Lie G, e supponiamo di avere due rappresentazioniirriducibili Γ1,Γ2 – di dimensione, rispettivamente, d1 e d2 – dell’algebra g; supponiamo inoltre che Γ1 eΓ2 si esponenzino correttamente ad altrettante rappresentazioni del gruppo G.Sia a ∈ g; per ipotesi, possiamo costruire i rappresentanti eΓ1(a), eΓ2(a), i quali sono operatori sullo spaziodi rappresentazione:
|ψ〉 7→ eΓ1(a)|ψ〉, |ϕ〉 7→ eΓ2(a)|ϕ〉.
È possibile costruire i corrispettivi sottogruppi a un parametro:
|ψ〉 7→ etΓ1(a)|ψ〉, |ϕ〉 7→ etΓ2(a)|ϕ〉;
diventa naturale a questo punto costruire la rappresentazione prodotto di Γ1 e Γ2 che agisce sullo spazioprodotto tensoriale dei due spazi di rappresentazione {|ψ〉} ⊗ {|ϕ〉}, di dimensione d1d2. A questo scopo,definiamo il sottogruppo a un parametro
|ψ〉 ⊗ |ϕ〉 7→(etΓ1(a)|ψ〉
)⊗(etΓ2(a)|ϕ〉
),
e prendiamone il generatore:
|ψ〉 ⊗ |ϕ〉 7→ d
dt
[(etΓ1(a)|ψ〉
)⊗(etΓ2(a)|ϕ〉
)]t=0
= Γ1(a)|ψ〉 ⊗ |ϕ〉+ |ψ〉 ⊗ Γ2(a)|ϕ〉.
Indichiamo questa rappresentazione di a con Γ1 × Γ2:
Γ1 × Γ2 := Γ1 ⊗ 1d2+ 1d1
⊗ Γ2; (2.5.3)
la stessa definizione di rappresentazione prodotto può essere data per rappresentazioni di algebre com-plesse.
Osservazione 2.5.25. In generale, Γ1×Γ2 sarà una rappresentazione riducibile; siamo interessati a studiarecome si riduca nei vari casi.
Osservazione 2.5.26. Se Γ1 = Γ2 =: Γ, e se {|ψi〉}i=1,...,d è il corrispettivo spazio di rappresentazione,allora Γ× Γ agisce sullo spazio {|ψi〉 ⊗ |ψj〉}i,j=1,...,d (con d dimensione di Γ). Passiamo alla nuova base{ϑ(S)
ij , ϑ(A)ij }i,j , con {
ϑ(S)ij := |ψi〉 ⊗ |ψj〉+ |ψj〉 ⊗ |ψi〉
ϑ(A)ij := |ψi〉 ⊗ |ψj〉 − |ψj〉 ⊗ |ψi〉
;
il numero di ϑSij indipendenti è pari a 12d(d+ 1), mentre quello di ϑ(A)
ij indipendenti è 12d(d− 1) (cosicché
il numero di elementi di base è proprio d2).I sottospazi {ϑ(S)
ij }i,j e {ϑ(A)ij }i,j sono (Γ× Γ)-invarianti. Infatti:
È chiaro dalla procedura che il peso relativo all’autospazio {|ψi〉 ⊗ |ψj〉} è la somma dei pesi relativiall’autospazio {|ψi〉} e all’autospazio {|ψj〉}. Ad esempio, il peso relativo all’autospazio generato da {|ψ1〉⊗|ψ1〉} è 2λ1.L’highest weight della rappresentazione (3× 3)S è quello relativo a ϑ
(S)11 , cioè 2λ1, mentre quello di
(3× 3)A è quello relativo a ϑ(A)12 (dal momento che ϑ(A)
11 è nullo), cioè λ1 + λ2.Il peso 2λ1 = 2Λ1 contraddistingue la rappresentazione Γ(2, 0) = 6, mentre λ1 + λ2 = 2Λ1 − α1 =13 α1 + 2
3 α2 = Λ2 è l’highest weight di Γ(0, 1) = 3 (così indicata in quanto complessa coniugata di 3).In definitiva, si ha la decomposizione:
3× 3 = 6 + 3,
vale a direΓ(1, 0)× Γ(1, 0) = Γ(2, 0) + Γ(0, 1);
si noti che le dimensioni sommano correttamente a 9.Il diagramma dei pesi del prodotto può essere ottenuto a partire dal diagramma dei pesi di 3 sommandoi pesi tra loro in tutti i modi possibili. Il risultato è un diagramma con 9 pesi, che può essere vistocome la sovrapposizione dei diagrammi di 6 e 3. Pertanto, il prodotto di due (o più) rappresentazioni haun’intuitiva rappresentazione grafica.
Prodotto triplo
Vogliamo ora costruire il triplo prodotto Γ× Γ× Γ.Lo spazio di rappresentazione è costituito dagli elementi |ψi〉 ⊗ |ψj〉 ⊗ |ψk〉, che denotiamo per semplicitàcon |i j k〉. Partizioniamo tale spazio nel seguente modo:
a) combinazioni completamente simmetriche:
ϑ(1)ijk := |i j k〉+ |j k i〉+ |k i j〉+ |i k j〉+ |j i k〉+ |k j i〉;
b) combinazioni completamente antisimmetriche:
ϑ(2)ijk := |i j k〉+ |j k i〉+ |k i j〉 − |i k j〉 − |j i k〉 − |k j i〉;
1Le rappresentazioni di A1 e di A2, in fisica, vengono spesso indicate con il numero corrispondente alla loro dimensione(benché questo non sia, nel caso di A2, sufficiente per distinguerle).
2.5. Studio delle algebre di Lie 79
c) combinazioni miste:ϑ
(3)ijk := |i j k〉 − |k i j〉+ |j i k〉 − |k j i〉;
ϑ(4)ijk := |i j k〉 − |j k i〉 − |j i k〉+ |k j i〉;
gli elementi ϑ(3)ijk e ϑ(4)
ijk sono simmetrici rispetto allo scambio, rispettivamente, i↔ j e i↔ k.Questa divisione fornisce una base dello spazio di rappresentazione, dal momento che
|i j k〉 =1
6
(ϑ
(1)ijk + ϑ
(2)ijk
)+
1
3
(ϑ
(3)ijk + ϑ
(4)ijk
);
è possibile dimostrare che ciascuno dei sottospazi generati dai ϑ(α)ijk è invariante rispetto alla rappresenta-
zione prodotto. Pertanto, essa si scompone (almeno) in
Γ× Γ× Γ =(Γ× Γ× Γ
)(1)+(Γ× Γ× Γ
)(2)+(Γ× Γ× Γ
)(3)+(Γ× Γ× Γ
)(4).
Esempio L = A2.
Consideriamo nuovamente la rappresentazione 3, e studiamo 3× 3× 3.L’highest weight è senz’altro 3Λ1, che è anche l’highest weight dello spazio totalmente simmetrico (è ilpeso relativo a ϑ(1)
111). Quindi si ha (Γ× Γ× Γ
)(1)= Γ(3, 0) = 10;
la dimensione, ottenuta facilmente usando la formula 2.5.13 di Weyl, può essere verificata direttamenteenumerando gli elementi di base dell’algebra:
ϑ(1)111, ϑ
(1)112, ϑ
(1)113, ϑ
(1)122, ϑ
(1)123, ϑ
(1)133, ϑ
(1)222, ϑ
(1)223, ϑ
(1)233, ϑ
(1)333.
Lo spazio completamente antisimmetrico è generato dal solo elemento non nullo ϑ(2)123, per cui il suo highest
Generalizziamo gli esempi che abbiamo visto per A2. Prendiamo perciò in considerazione la rappresenta-zione fondamentale1 l + 1 e studiamo la decomposizione di
l + 1× l + 1
nella sua parte simmetrica e antisimmetrica. I pesi di l + 1 sono noti (esistono apposite tavole dei pesiche possono essere consultate al riguardo), e sono
Λ1, Λ1 − α1, . . . , Λ1 − α1 − · · · − αl.
L’highest weight della parte simmetrica è quello relativo a ϑ(S)11 , cioè 2Λ1, mentre quello della parte
antisimmetrica è 2Λ1 − α1 (relativo a ϑ(A)12 ), che risulta essere proprio Λ2. Pertanto(
l + 1× l + 1)(S)
= Γ(2, 0, . . . , 0) =1
2(l + 1)(l + 2)
e (l + 1× l + 1
)(A)= Γ(0, 1, . . . , 0) =
1
2l(l + 1)
(le dimensioni coincidono con le possibili scelte di coppie i, j tenendo conto di simmetria e antisimmetria).Questo mostra che le parti simmetrica e antisimmetrica sono irriducibili.
Generalizzando ulteriormente al caso di più fattori, cioè
l + 1× · · · × l + 1,
valgono le seguenti proprietà:
a) la decomposizione ottenuta simmetrizzando e antisimmetrizzando opportunamente lo spazio dirappresentazione produce sempre rappresentazioni irriducibili;
b) ogni rappresentazione irriducibile di Al può essere ottenuta in questo modo.
Tableaux di Young
Il prodotto di rappresentazioni di Al può essere visualizzato ed effettuato manipolando oggetti schematicichiamati tableaux di Young. Un tableau di Young è un modo di schematizzare una rappresentazioneirriducibile che sfrutta la proprietà b) enunciata alla fine dello scorso paragrafo.Si comincia definendo il tableau della rappresentazione fondamentale l + 1: questo è:
Il passo successivo è costruire il prodotto antisimmetrico di due rappresentazioni fondamentali:
o il prodotto simmetrico:
Iterando il procedimento, si ottengono tutte e sole le rappresentazioni irriducibili di A2.Naturalmente, ci occorrerà un metodo per associare a ogni data rappresentazione il suo tableau, e viceversa.A questo scopo, mostriamo in maggior dettaglio le regole di costruzione di un tableau.
1Di seguito, a scopo di chiarezza, adoperiamo la sottolineatura in luogo del grassetto per identificare una rappresentazionetramite la sua dimensione.
2.5. Studio delle algebre di Lie 81
Se abbiamo una rappresentazione ottenuta come prodotto di M rappresentazioni fondamentali, il suotableau di Young sarà formato da M cubetti disposti nel seguente modo:
1 2 3 · · ·
· · ·
......
...
M
Le colonne sono disposte in ordine di lunghezza decrescente da sinistra a destra (o, equivalentemente,le righe sono in ordine di lunghezza decrescente dall’alto al basso). Dal momento che i cubetti vengonoincolonnati a seguito di un’antisimmetrizzazione, le colonne non possono essere più lunghe di l + 1 (nonesistono oggetti antisimmetrici rispetto a un numero di indici maggiore della cardinalità dell’insieme sucui tali indici prendono valori).Calcoliamo l’highest weight di un tableau qualsiasi, ad esempio
Gli elementi di base di questa rappresentazione sono simmetrici rispetto allo scambio di indici dal primoal quinto, o di indici dal sesto al nono, o del decimo indice con l’undicesimo; e sono antisimmetrici rispettoallo scambio di un indice dal primo al quinto con un indice dal sesto in poi, eccetera.L’elemento di base cui corrisponde l’highest weight è quello per cui la somma degli indici è minima (dalmomento che, come abbiamo visto, si ha λ1 > λ2 > · · · > λd), ed è quindi ϑ111112222334. Allora l’highestweight è 5λ1 + 4λ2 + 2λ3 + λ4.
Più in generale, supponiamo di avere un tableau con n1 colonne di lunghezza 1, n2 colonne di lunghezzadue, . . . , nl+1 colonne di lunghezza l+ 1. Il contributo di una colonna di lunghezza j all’highest weight è
j∑i=1
λi = Λ1 + . . .+ (Λ1 − α1 − · · · − αj) =
{Λj j = 1, . . . , l
0 j = l + 1.
Notiamo che le colonne lunghe l + 1 non contribuiscono all’highest weight (e possono quindi esserecancellate dal tableau).L’highest weight si ottiene sommando tutti i contributi:
Λ = n1Λ1 + · · ·+ nlΛl,
che è per definizione l’highest weight della rappresentazione Γ(n1, . . . , nl). Questo istituisce una corrispon-denza molto intuitiva tra rappresentazioni di Al e tableaux di Young.
Esempi
• Abbiamo visto che 3× 3 = 6 + 3; questo si scrive
(dove abbiamo indicato con • la rappresentazione banale, che si potrebbe equivalentemente scrivere
nella forma ).
82 Capitolo 2. Gruppi di Lie
Da questi due esempi si intuisce che potrebbe esistere un metodo grafico per calcolare il prodotto di duetableaux (cioè di due rappresentazioni). In effetti, esiste un algoritmo che permette di decomporre un pro-dotto di questo tipo semplicemente operando sui tableaux, anche se questo metodo non è particolarmenteintuitivo, e manca un’interpretazione accessibile di “quello che si sta facendo”.Il modo più semplice per illustrarne il funzionamento è farlo su un esempio. Calcoliamo perciò 8 × 8(prodotto dell’aggiunta di A2 con sé stessa).
• Per prima cosa, disegniamo i due tableaux, etichettando i cubetti del secondo nel seguente modo:
× a ab
• Ora consideriamo il primo cubetto contrassegnato (partendo dall’alto a sinistra) e attacchiamolo alprimo tableau in tutti i modi possibili (e consentiti):
aa
a
• Ripetiamo il procedimento con il secondo; scartiamo le copie di tableux già prodotti (due ta-bleaux sono uguali se hanno la stessa forma e gli stessi contrassegni); attaccando il secondo cubettootteniamo:
a a aa
a
aa
a
Attaccando l’ultimo cubetto si ottiene:
a a b a ab
a a
b
a ba
aa b
aa
b
a b
a
ab
a
ba
aa
a b
• Infine, per ogni tableau, partendo dall’alto a destra e percorrendo le righe verso sinistra e andandoa capo alla fine di ciascuna, contiamo il numero di a e di b presenti nel tableau tenendo traccia deitotali. Se, a un qualsiasi punto del conteggio, il numero di b supera quello di a, allora il tableau nonè valido e deve essere cancellato.
Nel nostro caso, verranno cancellati i tableaux numero 1,4,7 e 9.
I tableaux così ottenuti forniscono la decomposizione dell’algebra. Abbiamo pertanto (avendo cancellatole colonne di lunghezza 3) che
× = + + + + + •
vale a dire8× 8 = 27 + 10 + 10 + 8 + 8 + 1
(le dimensioni sommano correttamente a 64).
Tableaux e algoritmi del genere esistono anche per le rappresentazioni di so(l), ma sono più complessi eperciò meno interessanti.
2.5. Studio delle algebre di Lie 83
Cenno ai prodotti di rappresentazioni in fisica
In fisica, come abbiamo già ricordato, i gruppi di Lie codificano le simmetrie che si osservano o che siritiene siano presenti in dati sistemi.In cromodinamica quantistica, ad esempio, esiste una nozione di carica di colore che viene portata daiquark (e dai gluoni), la quale può essere di tre tipi (senza contare le tre anticariche), spesso denominaticonvenzionalmente rosso, verde e blu. Il gruppo di colore previsto dalla teoria è SU(3), un gruppo 8-dimensionale; la rappresentazione fondamentale della sua algebra su(3) = A2, come abbiamo già vistodiverse volte, è di dimensione 3: i quark ϕi (i = 1, 2, 3) appartengono allo spazio di rappresentazione di3, mentre gli antiquark ϕi a quello di 3.Sperimentalmente, le particelle osservate in natura (e in particolare gli adroni, cioè gli stati legati diquark) non sono mai “colorate”, il che significa che devono appartenere alla rappresentazione banale disu(3) (nessun indice di colore libero); si può vedere facilmente che un adrone può quindi essere realizzatosolo in due modi:
• come stato legato qq:
× = + •
Queste particelle sono chiamate mesoni, e coincidono con le combinazioni ϕiϕi;
• come stato legato qqq:× × = •+ · · ·
Queste particelle sono dette barioni, e coincidono con le combinazioni εijkϕiϕjϕk.
La simmetria di colore è ritenuta esatta. I quark possiedono anche un gruppo di simmetria non esattadetto gruppo di sapore, che è sempre SU(3).
Sono in corso tentativi di unificare le simmetrie esatte note in natura (simmetria di colore, simmetriaelettrodebole) in un’unica “teoria del tutto” che le comprenda tutte come casi particolari. Si pensa chequeste simmetrie, infatti, possano essere “cristallizzazioni” di un’unica, grande simmetria che si sarebberotta durante le fasi primordiali dell’universo: SU(5) è il candidato a essere il gruppo della simmetria inquestione, dal momento che contiene al proprio interno l’osservata simmetria SU(3)× SU(2)×U(1).
2.5.10 Sottoalgebre e rappresentazioni
Nello scorso paragrafo si è accennato al fatto sperimentale che, in natura, risultano osservabili simmetrieche si ritiene facciano parte di una struttura di simmetria più grande, la quale si è però rotta dopoil big bang. Per questo motivo, riveste grande interesse fisico lo studio delle sottoalgebre, delle lororappresentazioni e del loro rapporto con le rappresentazioni delle algebre in cui sono contenute; è proprioquesto l’argomento che ci apprestiamo a trattare.Consideriamo un’algebra complessa semisemplice L e una sua sottoalgebra L ′ (ma il discorso varràanche per algebre reali g ⊃ g′ e per algebre decomponibili come somma di un’algebra semisemplice piùun centro banale, come ad esempio u(n) = su(n)⊕ u(1)).Studiamo dapprima un esempio pratico.
Esempio: immersione di su(2) in su(3) L’immersione può essere effettuata in più modi.
a) Se A =(a bc d
)è una matrice appartenente a su(2), cioè una matrice 2× 2 antihermitiana a traccia
nulla, allora
A :=
a b 0c d 00 0 0
è una matrice antihermitiana 3× 3 a traccia nulla, cioè un membro di su(3).
84 Capitolo 2. Gruppi di Lie
b) Se A è una matrice di su(2), allora adA è una matrice di so(3) (come abbiamo già visto), e inparticolare di su(3) (tutte le matrici reali antisimmetriche sono in particolare antihermitiane e atraccia nulla).
Diciamo che due immersioni sono coniugate tra loro se esiste un automorfismo di L che mappa l’unanell’altra; due immersioni coniugate sono “sostanzialmente la stessa”, in quanto membri della stessa classedi equivalenza; per questo motivo, siamo interessati a studiare immersioni che non siano coniugate.
Le immersioni a) e b) non possono essere coniugate, perchè la prima è riducibile (in modo banale), mentrel’altra non lo è (essendo la rappresentazione aggiunta).Usando la base di Weyl, troviamo gli elementi di base delle due immersioni. Di seguito denotiamo glielementi appartenenti alla sottoalgebra tramite apici, mentre gli oggetti privi di apice sono elementi dellasovra-algebra L .
a) Si ha
h′α′ =1
4
(1 00 −1
), e′α′ =
1
2
(0 10 0
), e′−α′ =
1
2
(0 0−1 0
)(gli elementi e′ si trovano da h′α′ sapendo che [e′α′ , e
′−α′ ] = −h′α′ e inoltre e′−α′ = (e′α′)
†). L’immer-sione si limita ad aggiungere una riga e una colonna di zeri, cosicché
h′α′ =1
4
1 0 00 −1 00 0 0
=3
2hα1 , e′α′ =
1
2
0 1 00 0 00 0 0
=
√6
2eα1 ,
e′−α′ =1
2
0 0 0−1 0 00 0 0
=
√6
2e−α1
.
Osserviamo che la sottoalgebra di Cartan di su(2) è contenuta in quella di su(3) a seguito dell’im-mersione; si dice in questo caso che l’immersione è in forma canonica. Benché questo non accada ingenerale, vale il
Teorema 2.5.16. (di Dynkin) Se L ′ ⊂ L , allora esiste un automorfismo ψ di L tale che
ψ(H ′) ⊂H ,
cioè ogni immersione è coniugata a un’immersione in forma canonica.
b) In questo caso abbiamo
T ′1 =1
2
(0 ii 0
), T ′2 =
1
2
(0 1−1 0
), T ′3 =
1
2
(i 00 −i
),
e, ricordando la divisione di su(2) in sottoalgebra di Cartan e spazi di radice:
h′α′ = − i2T ′3, e′α′ = − i
2(T ′1 + iT ′2) , e′−α′ =
i
2(T ′1 − iT ′2) ;
ricordando l’azione dell’aggiunta sui Ti, abbiamo che
h′α′ =1
2
0 −i 0i 0 00 0 0
6∈H ,
dal momento che il sottospazio di Cartan di su(3) è generato dalle matrici 12λ3,
12λ8.
2.5. Studio delle algebre di Lie 85
Questa immersione non è in forma canonica; per renderla tale, diagonalizziamo h′α′ :
Uh′α′U−1 =
1
2
1 0 00 −1 00 0 0
, con U =1√2
1 −i 01 i 0
0 0√
2
∈ SU(3).
Il cambio di base agisce sugli e′ nel seguente modo:
e′α′ 7→ Ue′α′U−1 = −
√3 (eα1+α2
+ e−α2) ,
e′−α′ 7→ Ue′−α′U−1 = −
√3(e−(α1+α2) + eα2
).
Introduciamo una nuova nozione che renderà evidente la differenza tra questa immersione e la precedente.
Definizione 2.5.21. Un’immersione è detta regolare se ∀α′ radice di L ′, ∃α radice di L tale cheh′α′ = Ahα
e′α′ = Beα
e′−α′ = Ceα
con A,B,C costanti.
Notiamo che l’immersione a) è regolare, mentre la b), anche una volta messa in forma canonica, non lo è.
Un’immersione sarà in generale non regolare; siamo interessati a studiare le immersioni regolari.
Esempio Come abbiamo già accennato
A4 ⊃ A2 ⊕A1;
adoperiamo l’immersione (banale)
(A′ ∈ A2, A
′′ ∈ A1
)7→
A′ O
O A′′
∈ A4.
Dalle tavole delle radici, risulta
hA2α1
=5
3hA4α1, hA2
α2=
5
3hA4α2, hA1
α =5
2hA4α4,
il che mostra che l’immersione è in forma canonica; inoltre risulta
eA2±α1
=
√5
3eA4±α1
, eA2±α2
=
√5
3eA4±α2
,
eA2
±(α1+α2) =
√5
3eA4
±(α1+α2), eA1±α =
√5
2eA4±α4
;
l’immersione è quindi regolare.
Consideriamo una rappresentazione Γ di un’algebra L ; i pesi di Γ sono funzionali sul sottospazio diCartan H di L .
Prendiamo ora un’immersione L ′ ⊂ L in forma canonica, cosicché H ′ ⊂H ; allora i pesi di Γ possonoessere ristretti a funzionali su H ′, e quindi a pesi di una qualche rappresentazione (in generale riducibile)di L ′.
Il modo in cui questa rappresentazione si riduce è chiamato branching rule dell’immersione.
86 Capitolo 2. Gruppi di Lie
Esempi
• su(2) ⊂ su(3) con l’immersione regolare.Il generico funzionale sul sottospazio di Cartan di su(3) è della forma
µ1α1 + µ2α2
(dove α1, α2 sono le radici semplici e µ1, µ2 numeri complessi), mentre il generico funzionale sulsottospazio di Cartan di su(2) è
µ′α′
(con α′ radice semplice di su(2) e µ′ ∈ C).
Imponiamo che i funzionali siano coincidenti su H ′:
µ1α1(h′) + µ2α2(h′) = µ′α′(h′) ∀h′ ∈H ′.
È ovviamente sufficiente imporre questa condizione sugli elementi di base (in questo caso, sul soloh′α′). In generale, avrò quindi tante relazioni quant’è la dimensione di H ′. Come abbiamo già visto,si ha
h′α′ =3
2hα1
,
da cui
µ1α1(h′α′) + µ2α2(h′α′) =3
2(µ1α1(hα1) + µ2α2(hα1)) =
3
2(µ1〈α1, α1〉+ µ2〈α1, α2〉) =
1
2µ1 −
1
4µ2,
µ′α′(h′α′) = µ′〈α′, α′〉 =1
2µ′
=⇒ µ1 −1
2µ2 = µ′. (2.5.4)
a) Consideriamo la rappresentazione 3 di su(3); i pesi sono
λ1 =2
3α1 +
1
3α2, λ2 = −1
3α1 +
1
3α2, λ3 = −1
3α1 −
2
3α2;
Stando alla 2.5.4, l’immersione porta i pesi in
λ1 −→1
2α′, λ2 −→ −
1
2α′, λ3 −→ 0,
che sono rispettivamente i due pesi della 2 e l’unico peso della 1 di su(2), fornendo la branchingrule
3 −→ 2 + 1.
Specifichiamo che con la scrittura di cui sopra intendiamo che i pesi della rappresentazione 3di su(3), una volta ristretti al sottospazio di Cartan di su(2), coincidono con i due pesi dellarappresentazione 2 di su(2), più il peso della rappresentazione banale (o, in breve, la restrizionedella rappresentazione 3 di su(3) coincide con la somma delle rappresentazioni 2 e 1 di su(2)).
b) Consideriamo ora la rappresentazione aggiunta 8 di su(3); i pesi sono le radici (comprese leradici nulle):
α1 + α2, α1, α2, 0, 0, −α2, −α1, −(α1 + α2),
che vengono mandate rispettivamente in
1
2α′, α′, −1
2α′, 0, 0,
1
2α′, −α′, −1
2α′.
2.5. Studio delle algebre di Lie 87
Organizzando i pesi a partire dal più alto (α′), otteniamo:
α′, 0, −α′ : 3 di su(2);
1
2α′, −1
2α′ : 2 di su(2) (×2);
0 : 1 di su(2);
da cui la branching rule8 −→ 3 + 2 + 2 + 1.
Esiste un’interpretazione grafica della branching rule: i pesi, visti come vettori nel sottospazio di Cartandell’algebra L , vengono proiettati sul sottospazio di Cartan di L ′ (che può essere scelto come assecoordinato, dal momento che l’immersione è canonica), fornendo i nuovi pesi ristretti a H ′.Questa interpretazione, tuttavia, non vale in generale, come vediamo dal seguente esempio.
Esempi
• su(2) ⊂ su(3) con l’immersione speciale.Con lo stesso procedimento di prima, ricordando che in questo caso
h′α′ = 3hα1 ,
e imponendo cheµ1α1(h′α′) + µ2α2(h′α′) = µ′α′(h′α′)
si ottieneµ′ = 2µ1 − µ2. (2.5.5)
a) Considerando la 3 di su(3), otteniamo, dalla 2.5.5:
Da questo esempio appare evidente che la branching rule dipende dall’immersione. Questa immer-sione non ammette più un’interpretazione grafica trasparente.
• su(3)⊕ su(2) ⊂ su(5) con l’immersione regolare.È necessario imporre che
µ1αA41 + µ2α
A42 + µ3α
A43 + µ4α
A44 = µ′αA2
1 + µ′′αA22 + µ′′′αA1
su ciascuno dei tre elementi di base di H ′:
hA2α1
=5
3hA4α1, hA2
α2=
5
3hA4α2, hA1
α =5
2hA4α4.
Si ottiene µ′ = µ1 −
1
3µ3
µ′′ = µ2 −2
3µ3
µ′′′ = −1
2µ3 + µ4
88 Capitolo 2. Gruppi di Lie
a) Consideriamo la rappresentazione Γ(1, 0, 0, 0) = 5 di su(5); i suoi pesi sono
λ1 =4
5αA4
1 +3
5αA4
2 +2
5αA4
3 +1
5αA4
4 , λ2 = λ1 − αA41 ,
λ3 = λ2 − αA42 , λ4 = λ3 − αA4
3 , λ5 = λ4 − αA44 .
Si ha
λ1 −→2
3αA2
1 +1
3αA2
2 , λ2 −→ −1
3αA2
1 +1
3αA2
2 ,
λ3 −→ −1
3αA2
1 − 2
3αA2
2 , λ4 −→1
2αA1 , λ5 −→ −
1
2αA1 ;
i pesi λ1, λ2 e λ3 sono quelli della rappresentazione 3 di su(3), mentre λ4 e λ5 sono quelli della2 di su(2) (le rispettive rappresentazioni fondamentali).In effetti, considerando come è stata definita l’immersione, una simile decomposizione è proprioquello che ci dovevamo attendere.
Prima di poter scrivere la branching rule, è necessaria una digressione. Infatti, non avrebbesenso scrivere 5 −→ 3+2, dal momento che le rappresentazioni a membro destro si dovrebberoriferire all’algebra L ′, che è su(3)⊕ su(2), e non singolarmente a su(3) o a su(2).
Finora abbiamo visto esplicitamente soltanto rappresentazioni di algebre semisemplici. Stu-diamo quindi le rappresentazioni di algebre che sono somma diretta di due (o più) altrealgebre.
Rappresentazioni di algebre del tipo L1 ⊕L2.
Facciamo riferimento al gruppo associato a un’algebra di questo tipo; questo avrà la forma G1 ⊗ G2; ciinteressa costruire una rappresentazione di L1 ⊕L2 a partire da una rappresentazione Γ1 di L1 e Γ2 diL2.Supponiamo che Γ1 e Γ2 si esponenzino a dare rappresentazioni dei gruppi corrispondenti G1 e G2; questerappresentazioni sono
|ψ〉 7→ eΓ1 |ψ〉,
|ϕ〉 7→ eΓ2 |ϕ〉.
Definiamo in maniera naturale la seguente rappresentazione del gruppo prodotto:
|ψ〉 ⊗ |ϕ〉 7→(eΓ1 |ψ〉
)⊗(eΓ2 |ϕ〉
).
Troviamo la rappresentazione dell’algebra corrisponendente, come di consueto, passando al sottogruppoa un parametro e valutandone il generatore:
d
dt
[ (etΓ1 |ψ〉
)⊗(etΓ2 |ϕ〉
) ]t=0
= Γ1|ψ〉 ⊗ |ϕ〉+ |ψ〉 ⊗ Γ2|ϕ〉.
Questa rappresentazione si indica con (Γ1,Γ2), e la sua azione esplicita su un elemento (a1+a2) ∈ L1⊕L2
(con a1 ∈ L1 e a2 ∈ L2) è data da
(a1 + a2) 7→ (Γ1,Γ2)(a1 + a2) = Γ1(a1)⊗ 1d2+ 1d1
⊗ Γ2(a2)
(dove si suppone che dim Γi = di).Si sarà notata l’analogia tra questo procedimento e quello che ci ha portato a definire le rappresentazioniprodotto (cfr. il paragrafo 2.5.3). A ogni modo, le due definizioni corrispondono a entità concettualmente
2.5. Studio delle algebre di Lie 89
diverse: mentre il prodotto di rappresentazioni Γ1 × Γ2 si effettua tra due rappresentazioni della stessaalgebra L (per dare una nuova rappresentazione della medesima algebra), la rappresentazione (Γ1,Γ2) ècostruita a partire da rappresentazioni di L1 ed L2, algebre in generale diverse, e costituisce una rappre-sentazione dell’algebra, ancora diversa, L1 ⊕L2.
Valgono le proprietà:
• Γ1,Γ2 irriducibili =⇒ (Γ1,Γ2) irriducibile;
• ogni rappresentazione irriducibile di L1 ⊕L2 è del tipo (Γ1,Γ2).
Per concludere l’esempio di cui sopra, quindi, scriviamo la branching rule di su(3) ⊕ su(2) ⊂ su(5) cheabbiamo trovato:
5 −→ (3,1) + (1,2).
Immersioni del tipo L ′ ⊕ u(1) ⊂ L
Estendiamo la trattazione al caso di immersioni della forma
L ′ ⊕L ′′ ⊂ L ,
con L ′′ algebra abeliana; il caso tipico è L ′′ = u(1) (l’algebra del gruppo circolare, o equivalentementeil campo dei reali con l’operazione di addizione).
Consideriamo una base di L data da {T1, . . . , Tn}, scelta in modo tale che {T1, . . . , Tm} (con m < n) siauna base di L ′.Consideriamo la branching rule della rappresentazione aggiunta adL : dato che il suo spazio di rap-presentazione coincide con L , L ′ sarà un suo sottospazio, e questo deve essere invariante, in quantoadL
∣∣L ′
= adL ′ ; possiamo cioè scrivere
adL −→ adL ′ + altro.
Se vogliamo che l’immersione sia estendibile a L ′ ⊕ u(1) ⊂ L , è necessario che uno tra i generatoririmanenti Tm+1, . . . , Tn sia l’elemento base di u(1). Supponiamo che tale elemento sia Tu; allora
[Tj , Tu] = 0 ∀j = 1, . . . ,m
(dato che le algebre sono in somma diretta), cioè nello spazio di rappresentazione L deve esistere unospazio 1-dimensionale (quello generato da Tu) su cui ogni elemento di L ′ viene mandato nella matricenulla. In altre parole, deve essere
(adL )a′ (Tu) = 0 ∀a′ ∈ L ′.
Questo avviene se e solo se nella parte di decomposizione che abbiamo chiamato “altro” figura la rappre-sentazione banale.In definitiva, l’immersione L ′ ⊂ L è estendibile a L ′ ⊕ u(1) ⊂ L se e solo se
adL −→ adL ′ + 1 + . . . ,
dove 1 è la rappresentazione banale di L ′.
90 Capitolo 2. Gruppi di Lie
Esempi
• su(2) ⊂ su(3) con l’immersione regolare.L’aggiunta di su(3) è 8. Abbiamo già visto che
8 −→ 3 + 2 + 2 + 1,
sicché l’immersione può essere estesa a su(2)⊕ u(1) ⊂ su(3).
• su(2) ⊂ su(3) con l’immersione speciale.In questo caso risulta
8 −→ 5 + 3,
perciò non è possibile estendere questa rappresentazione per includere u(1).
• su(3)⊕ su(2) ⊂ su(5) con l’immersione regolare.Si può dimostrare che l’aggiunta di su(5) ha dimensione 24, e che con questa immersione:
24 −→ (3,2) + (3,2) + (8,1) + (1,3) + (1,1) ;
dal momento che (1,1) è evidentemente la rappresentazione banale di su(3)⊕ su(2), questa immer-sione può essere estesa a
su(3)⊕ su(2)⊕ u(1) ⊂ su(5)
(che è l’immersione standard adoperata nelle teorie di grande unificazione, come abbiamo accennatonel paragrafo 2.5.9).
Per inciso, osserviamo che tutte e tre le immersioni sopra menzionate sono massimali. Un’immersioneL ′ ⊂ L è detta massimale se �∃L ′′ : L ′ ( L ′′ ( L .
Osservazione 2.5.27. Se L1 ⊕ · · · ⊕Ln ⊂ L è un’immersione regolare massimale, Hi la sottoalgebra diCartan di Li (i = 1, . . . , n) e H quella di L , si ha
dim H =
n∑i=1
dim Hi.
Vediamo ora come studiare le immersioni regolari di questo tipo.
gli elementi di u(1), via immersione, devono essere matrici su(3) che commutano con tutte le matricidi questo tipo. Grazie al lemma di Schur1 si può facilmente mostare che tali matrici sono della formaµ 0 0
0 µ 00 0 κ
con 2µ+ κ = 0.
1Questo può essere enunciato come segue: se Γ è una rappresentazione riducibile di dimensione d di L e A una matriced× d tale che [Γ(a), A] = 0 per ogni a ∈ L , allora A è un multiplo della matrice identità.
2.5. Studio delle algebre di Lie 91
L’antihermiticità impone inoltre che µ e κ siano immaginari puri, cosicché le matrici di u(1) sonodel tipo
α
i 0 00 i 00 0 −2i
con α ∈ R.
Dal momento che
hα1=
1
6
1 0 00 −1 00 0 0
, hα2=
1
6
0 0 00 1 00 0 −1
(base di Weyl della sottoalgebra di Cartan di su(3)), risulta
b ∈ u(1) ⇐⇒ b = 12i
(hα2 +
1
2hα1
)= 12i hα2+1/2α1
.
Graficamente, si può osservare che u(1) si sistema sull’asse della ordinate (avendo posto come assedelle ascisse H ′. Il fatto che u(1) ⊥H ′ non è un caso: si ha
[hu(1), eα1 ] = α1(hu(1)) eα1 ,
e dato che eα1∝ eα′ , e poiché gli elementi di u(1) devono commutare con quelli di su(2), ne segue
cheα1(hu(1)) = B(hu(1), hα1) = 0.
Questo discorso può essere generalizzato a ogni immersione regolare.
• su(3)⊕ su(2)⊕ u(1) ⊂ su(5).
L’immersione regolare su(3)⊕ su(2) ⊂ su(5) è
(A′ ∈ su(3), A′′ ∈ su(2)
)7→
A′ O
O A′′
∈ su(5);
analogamente a prima, vediamo che gli elementi di u(1) sono del tipo
b =
µ 0 0 0 00 µ 0 0 00 0 µ 0 00 0 0 κ 00 0 0 0 κ
con 3µ+ 2κ = 0,
(ancora con la condizione di antihermiticità).
Consultando le tavole delle radici, si trova che
b ∝ 2hα1+ 4hα2
+ 6hα3+ 3hα4
;
siccome [hu(1), eαi ] = 0 per i = 1, 2, 4, si vede che hu(1) si inserisce ortogonalmente all’iperpianogenerato da hα1 , hα2 , hα4 .
92 Capitolo 2. Gruppi di Lie
Rappresentazioni di u(1)
Consideriamo (R+, ·) come gruppo di ricoprimento di u(1) con la mappa di ricoprimento:
φ : R+ → u(1)
ey 7→ eiy y ∈ R ;
questo è il ricoprimento universale di u(1), e si ha
Kerφ = {e2πk | k ∈ Z},
conu(1) ∼ R+
/Kerφ.
Questo significa che stiamo percorrendo il gruppo u(1), pensato come circonferenza unitaria, avendo curadi quozientare sul numero di giri compiuti, o, in altre parole, stiamo “avvolgendo” la retta reale sullacirconferenza unitaria.Le varie rappresentazioni di u(1) corrispondono ai possibili “numeri di avvolgimento” di tale ricoprimento:
Γp : eiy 7→ eipy , p ∈ Z,
dove l’intero p viene usualmente chiamato la carica della rappresentazione. La carica deve necessaria-mente essere intera, perchè l’identità ei(y+2π) = eiy impone la “condizione di quantizzazione” eip(y+2π) =eipy =⇒ 2πp = 2πk per qualche k intero.A livello di algebra, troviamo che l’unico elemento di base è
d
dyeiy∣∣∣∣y=0
= i,
che è rappresentato dad
dyeipy
∣∣∣∣y=0
= ip,
cosicché le funzioniγp : iy 7→ ipy
forniscono le rappresentazioni di u(1). Notiamo che a questo livello non ci sono più esplicite condizioni diquantizzazione della carica: nulla ci vieta di considerare p un parametro continuo.
Osservazione 2.5.28. In realtà, la carica del gruppo u(1) non deve necessariamente essere un numerointero, ma l’insieme dei valori che può assumere è in biiezione con Z. Infatti, oltre al ricoprimento φ dicui sopra, si potrebbe scegliere un doppio ricoprimento φ2 : ey 7→ eiy/2, con
Kerφ2 = {e4πk | k ∈ Z}
e rappresentazioni del gruppo eiy/2 7→ eipy, per cui la condizione di quantizzazione si scrive
eipy∣∣y=4π
= 1 =⇒ 2p ∈ Z.
In modo analogo, si potrebbe scegliere un ricoprimento φx per ogni x reale e diverso da 0; la condizionedi quantizzazione sussisterebbe nella forma xp ∈ Z. Ciò che conta è che la carica u(1), a differenza diquella della corrispettiva algebra, risulta necessariamente discretizzata: xp = {0,±1,±2, . . .}
2.5. Studio delle algebre di Lie 93
EsempioSiamo ora pronti per studiare la branching rule di su(2)⊕ u(1) ⊂ su(3) con l’immersione regolare.Vogliamo aggiungere la carica della rappresentazione di u(1) alla branching rule 3 −→ 2 + 1.Il sottospazio di Cartan dell’algebra L ′ = su(2) ⊕ u(1) ha dimensione 2, e abbiamo visto che u(1) siinserisce perpendicolarmente a H ′ (sottospazio di Cartan di su(2)). Disegniamo il sottospazio di Cartanreale dell’algebra L ′, che sarà isomorfo a R2, e poniamo il sottospazio u(1) sull’asse delle ordinate; inquesto modo, la carica u(1) di un vettore dello spazio è un multiplo della sua ordinata.Tracciati i tre pesi:
λ1 =1
6
(√3, 1)
λ2 =1
6
(−√
3, 1)
λ3 =1
6(0,−2)
possiamo assegnare arbitrariamente una carica a uno di essi (ciò equivale a fissare una scala delle ordinate);ad esempio, scegliamo di assegnare una carica pari a 1 al peso λ3; allora i pesi λ1 e λ2 avranno entrambicarica −1/2; poiché λ3 è evidentemente il generatore di u(1), mentre gli altri due pesi generano H ′,possiamo scrivere la completa branching rule:
3 −→ 2(− 12 ) + 1(1).
Allo stesso modo, si verifica che per la rappresentazione aggiunta di su(3) vale
8 −→ 3(0) + 2( 32 ) + 2(− 3
2 ) + 1(0).
Si ponga attenzione al fatto che le cariche di u(1) sono state assegnate mantenendo la stessa “scala diordinate” scelta prima.
Nell’esempio visto sopra, l’assegnazione della carica u(1) poteva essere svolta agilmente per via grafica,dato che il sottospazio di Cartan della sottoalgebra era isomorfo a R2. Vogliamo ora trovare un modo piùgenerale per compiere l’assegnazione.Per un generico peso λ = µjαj , la carica u(1) coincide con la sua coordinata lungo l’asse u(1), cioè
µjαj(hu(1));
il generatore hu(1) è scelto arbitrariamente.Nel nostro esempio, abbiamo considerato il peso λ3 portatore di carica 1:
λ3(hu(1)) = −1
3α1(hu(1))−
2
3α2(hu(1)) = 1;
chiamando hu(1) = κhα1+ 12 α2
si ottiene
κ
[−1
3
⟨α1, α1 +
1
2α2
⟩− 2
3
⟨α2, α1 +
1
2α2
⟩]= 1
κ
[−2
3· 1
4
]= 1 =⇒ −1
6κ = 1 =⇒ hu(1) = −6hα1+ 1
2 α2.
La carica di λ1 sarà quindi
λ1(hu(1)) =2
3α1(hu(1)) +
1
3α2(hu(1)) = −2
3
⟨α1,−6
(α1 +
1
2α2
)⟩+
1
3
⟨α2,−6
(α1 +
1
2α2
)⟩= −1
2.
Osservazione 2.5.29. La somma delle cariche u(1) di una rappresentazione deve essere 0, dal momentoche lo è la somma dei pesi (e, in particolare, delle loro ordinate).
3 −→ 2(− 12 ) + 1(1) : 2 ·
(−1
2
)+ 1 · 1 = 0.
8 −→ 3(0) + 2( 32 ) + 2(− 3
2 ) + 1(0) : 2 · 3
2+ 2 ·
(−3
2
)= 0.
94 Capitolo 2. Gruppi di Lie
Tabella 2.1: La classificazione delle particelle del MS in rappresentazioni del gruppo di simmetria SU(3)⊗SU(2)⊗u(1).
Particelle RappresentazioniSU(2) u(1) SU(3)
Bosoni g 1 0 8
W±, Z0, Aµ (1,3)(0) + (1,1)(0)
Leptoni1
(νll−
)L
2 −11
l−R 1 −2
Quark2
(ui
di
)L
2 1/33
uiR 14/3
diR −2/3
Esempio Consideriamo l’immersione regolare su(5) ⊃ su(3)⊕ su(2)⊕ u(1).Abbiamo visto che la branching rule della rappresentazione fondamentale è 5 −→ (3,1) + (1,2).Assegnando arbitrariamente la carica 1 alla (1,2), si ottiene immediatamente dall’osservazione 2.5.29 chela regola completa è
5 −→ (3,1)(− 23 ) + (1,2)(1)
Si può dimostrare che, con la stessa convenzione dell’esempio di cui sopra, valgono le seguenti regole(riferite sempre a questa immersione):
10 −→ (3,2)( 13 ) + (3,1)(− 4
3 ) + (1,1)(2) (2.5.6)
24 −→ (3,2)(− 53 ) + (3,2)( 5
3 ) + (8,1)(0) + (1,3)(0) + (1,1)(0) (2.5.7)
Accenno al ruolo delle immersioni nel MS e nelle GUT
Gli oggetti fondamentali descritti dal Modello Standard si dividono in materia (leptoni, quark) e radiazione(fotoni, bosoni intermedi W±, Z0, gluoni). Le teorie standard che descrivono la natura in termini diparticelle materiali che si scambiano particelle di radiazione sono teorie di gauge basate sul gruppo disimmetria locale
SU(3)col ⊗ SU(2)L ⊗ u(1)Y ,
dove SU(3)col è il gruppo di colore visto dall’interazione forte e SU(2)L ⊗ u(1)Y il gruppo di simmetriarilevante per l’interazione elettrodebole. L’interazione gravitazionale sfugge tuttora a una descrizione diquesto tipo.Gli stati fisici, materia e radiazione, sono elementi di spazi di rappresentazione di questo gruppo.In particolare, gli otto gluoni formano una base dello spazio di rappresentazione dell’aggiunta di SU(3),mentre W±, Z0 e il fotone Aµ generano quello dell’aggiunta di SU(2)⊗ u(1).I leptoni, che non subiscono l’interazione forte, appartengono allo spazio della rappresentazione banale diSU(3). La classificazione completa è riportata nella tabella 2.1.In questo caso, la carica u(1) è chiamata ipercarica (Y ), ed è legata alla carica elettromagnetica dallarelazione di Gell-Mann–Nishijima
Qem = T3 +Y
2, (2.5.8)
dove T3 è un altro numero quantico conservato dall’interazione forte (terza componente dell’isospin).1l sta per e, µ, τ , le tre famiglie leptoniche.2Si riporta solo la famiglia (u, d); i numeri quantici si ripetono uguali per le famiglie (c, s) e (t, b).
2.5. Studio delle algebre di Lie 95
Concentriamoci sulla prima generazione della materia:(νee−
)L
(ui
di
)L
eCL(ui)CL
(di)CL
(dove abbiamo elencato le antiparticelle levogire, che appartengono allo spazio delle corrispettive rappre-sentazioni complesse coniugate, in luogo delle particelle destrogire); queste appartengono, rispettivamente,agli spazi di rappresentazione di
(1,2)(−1) , (3,2)( 13 ) , (1,1)(2) , (3,1)(− 4
3 ) , (3,1)( 23 ) ;
paragonando questa scomposizione con la 2.5.6, e tenendo conto che 5 −→ (3,1)( 23 ) + (1,2)(−1) (l’ul-
timo addendo si spiega ricordando che 2 = 2), si può notare che le particelle materiali possono essereinteramente fatte rientrare nella rappresentazione 10 + 5 del gruppo SU(5).In modo analogo, la radiazione può essere inserita nella rappresentazione aggiunta 24 di SU(5) (cfr. 2.5.7).In questo caso, la branching rule della rappresentazione prevede l’esistenza di due bosoni addizionali,appartenenti a (3,2)(− 5
3 ) e a (3,2)( 53 ), la cui esistenza non è mai stata rilevata. La mancata osservazione
può essere spiegata ipotizzando per questi bosoni una massa molto elevata, al di là dell’intervallo di energiesperimentalmente accessibili dai nostri acceleratori. Purtroppo l’esistenza di tali particelle implicherebbefenomeni mai osservati quali il decadimento del protone: i nuovi bosoni renderebbero infatti possibile, adesempio, il canale di decadimento (con violazione del numero barionico)
p −→ e+ + π0,
mentre le osservazioni sperimentali suggeriscono fortemente la stabilità del protone, con una vita media> 2.1× 1029 yr.
La maggior parte delle teorie di grande unificazione ipotizza che questa “coincidenza” si possa spiegarenell’ambito di una simmetria più ampia rispetto a quella del MS e codificata dal gruppo SU(5). Il gruppo disimmetria SU(3)⊗ SU(2)⊗ u(1) usato nel MS, che abbiamo visto essere naturalmente immerso in SU(5),sarebbe stato privilegiato in natura a seguito di un meccanismo di rottura spontanea della simmetriaavvenuta nelle prime fasi del big bang analogamente a quanto previsto dalla teoria elettrodebole, oggilargamente accettata, che prevede che il gruppo di simmetria u(1)em delle equazioni di Maxwell sia ilrisultato di una rottura della più generale simmetria elettrodebole SU(2)L ⊗ u(1)Y .Per avere un meccanismo di questo tipo (meccanismo di Higgs) è necessario postulare l’esistenza di unnuovo campo scalare (l’unico campo che possa avere un valore di aspettazione del vuoto diverso da 0senza compromettere l’invarianza di Lorentz). Il bosone associato a questo campo, chiamato bosone diHiggs (
φ+
φ0
),
appartiene alla rappresentazione 2 di SU(2) e ha ipercarica 1. Il suo valore di aspettazione sullo stato divuoto è
〈φ〉 =
(0v
)con v 6= 0.Nella teoria elettrodebole si ha v ≈ 100GeV; la simmetria del vuoto si riduce a u(1)em, in quanto
σi〈φ〉 6= 0 Y 〈φ〉 6= 0,
mentreQem〈φ〉 =
(σ3 + Y
2
)〈φ〉 =
(1 00 0
)(0v
)= 0.
Per estendere questa idea all’intero SU(3) ⊗ SU(2) ⊗ u(1), consideriamo la sua algebra associata comeimmersa in un’algebra di dimensionalità maggiore:
su(3)⊕ su(2)⊕ u(1) ⊂ g;
96 Capitolo 2. Gruppi di Lie
un semplice conteggio mostra che il rango di g deve essere ≥ 4. Inoltre, richiediamo che le rappresentazionidi g non coincidando con le proprie complesse coniugate, in modo da includere nel modello la violazionedi C. Questa seconda richiesta esclude a priori (vedi teorema 2.5.14) le algebre Bl,Cl,D2l (per ogni l),E7,E8,F4 e G2.Delle algebre complesse semisemplici rimanenti, solo A4 ha rango 4, perciò su(5) è la scelta più naturaledi sovraalgebra per una GUT. Vengono anche studiate le algebre più complesse di rango 5 (su(6), so(10)),6 (su(7),E6), ecc.
Consideriamo la branching rule 5 −→ (3,1)( 23 ) + (1,2)(−1), legata alle particelle
(di)C e
(νee−
)L
.
Abbiamo visto come, per motivi puramente algebrici, la somma delle cariche (pesate sulla dimensionedelle rappresentazioni) debba essere nulla; questo si traduce in
−3Yd + 2Te− = 0,
cioè, per la (2.5.8),
Qemd =1
3Qeme ,
formula molto ardua da giustificare al di fuori di contesti GUT, e inserita semplicemente come postulatonel MS.
In conclusione, le teorie basate su SU(5) sono in grado di spiegare in modo elegante e semplice moltiriscontri osservativi di altrimenti difficile giustificazione teorica, ma non sono esenti da problemi. Oltreal già citato decadimento del protone, uno dei maggiori grattacapi è dato dal problema della gerarchia: iltempo di vita del protone implica che la scala di rottura della simmetria GUT debba essere superiore a1014÷ 1015 GeV; risulta difficile spiegare in modo soddisfacente perché questa scala sia di tanto superiorea quella, ad esempio, della rottura elettrodebole, per non parlare delle energie comunemente implicate infisica delle particelle (dell’ordine di qualche GeV).
2.6. Dalle algebre ai gruppi 97
2.6 Dalle algebre ai gruppi
Tipicamente, i fisici parlano indifferentemente di rappresentazioni di algebre e di rappresentazioni digruppi, ammettendo implicitamente che sia sempre possibile e “indolore” il passaggio dall’una all’altrastruttura. Questo è spesso vero in contesti fisici, ma comporta la perdita — come dovrebbe essere chiaroa questo punto — di ogni problema di natura globale. Vediamo brevemente come si possa passare dalladescrizione di un’algebra di Lie a quella dei gruppi di Lie corrispondenti.
Teorema 2.6.1. Sia g un’algebra di Lie reale semisemplice; esiste allora un unico gruppo di Lie connessoG con le seguenti proprietà:
a) l’algebra di Lie reale di G è (isomorfa a) g;
b) tutti e soli i gruppi di Lie semisemplici G la cui algebra di Lie è isomorfa a g si possono scriverenella forma
G ∼ G/K,
dove K è un sottogruppo finito del centro Z(G);
c) ogni rappresentazione di g si esponenzia a dare una rappresentazione di G.
G è essenzialmente1 il gruppo di ricoprimento universale già visto in precedenza, e in quanto tale èsemplicemente connesso.
Esempi
• SO(3), come abbiamo già visto, è isomorfo a SU(2)/{±I}. Questo vuol dire che la forma reale
compatta di A1 è l’algebra associata sia a SU(2) sia a SU(2)/{±I}.
• u(1) ∼ R+/
Kerφ, dove Kerφ = {e2πk | k ∈ Z}; questo è in realtà un caso “speciale” (u(1) non èsemplicemente connesso). In effetti, qualunque sottogruppo di Kerφ si scelga per quozientare R+ siotterrà sempre u(1), ricoperto più o meno volte (vedi il paragrafo sulle rappresentazioni di u(1)).
Consideriamo un gruppo G = G/K, e cerchiamo di capire quali rappresentazioni dell’algebra si possano
esponenziare a rappresentazioni del gruppo.Partiamo da una rappresentazione dell’algebra, esponenziamola e otteniamo in questo modo una rap-presentazione di G. Chiamiamo questa rappresentazione ΓG . Condizione necessaria e sufficiente affinchéquesta sia anche una rappresentazione di G è che
ΓG(T ) = I ∀T ∈ K. (2.6.1)
Ad esempio, la rappresentazione fondamentale di SU(2) non è una rappresentazione di SO(3), mentrel’aggiunta lo è. Osserviamo per inciso che è proprio la condizione 2.6.1 a portare alla quantizzazione dellacarica di u(1).
Concretamente, è possibile indicare delle condizioni sui Dynkin labels di una rappresentazione affinchéquesta si possa esponenziare a una rappresentazione di G
/K. Il procedimento è illustrato di séguito.
1Più precisamente, G è il cosiddetto gruppo universale lineare di g; si può dimostrare (Cornwell 1984, pp. 583–4) cheogni gruppo di Lie connesso G è isomorfo al gruppo di ricoprimento universale G quozientato per un sottogruppo invariantediscreto K del centro di G, e questo vale in particolare per il gruppo universale lineare. In questo caso, K prende il nome dilinearizzatore, e si può dimostrare che è sempre finito.
Se il linearizzatore è banale (contiene solo l’identità), il gruppo universale lineare e il gruppo di ricoprimento universalecoincidono; questo accade ad esempio quando g è un’algebra reale compatta, oppure quando g è non compatta ma semplice,e la sua complessificazione g è semisemplice ma non semplice (Cornwell 1984, ibid.).
98 Capitolo 2. Gruppi di Lie
• Individuiamo gli elementi del centro Z(G), che sono tutti e soli quelli del tipo exph per h ∈HR; essisono rappresentati (per definizione) da matrici che commutano con tutti gli elementi di G, e questoimplica, per il lemma di Schur, che
ΓG(T ) = µ(T )I ∀T ∈ Z(G).
• Se Λ è l’highest weight di ΓG e λ = Λ − qjαj un peso qualunque, dato che gli elementi di Z(G)devono avere elementi uguali sulla diagonale, deve risultare
• Bisogna evitare di contare più volte lo stesso elemento: se considero h′ = p′jhj , questo è indistinto
da h se ∀j = 1, . . . , l vale
pj − p′j =
l∑k=1
MkAjk〈αj , αj〉〈αk, αk〉
con A matrice di Cartan eMk ∈ Z ∀k.
• Ora che abbiamo Z(G), vogliamo capire chi sia Ker ΓG = {T ∈ G |ΓG(T ) = I}. ΓG è ancherappresentazione di G se
K ⊂ Ker ΓG .
• Si trova che exph ∈ Ker ΓG se e solo se
l∑j=1
l∑k=1
nkpj(A−1
)kj
〈αk, αk〉〈αj , αj〉
∈ Z, (2.6.2)
dove nk sono i Dynkin labels di ΓG .
Esempi
• su(2).Z (su(2)) 3 I; vediamo se esista un exph 6= I nel centro, con h = ph; sappiamo che eh coincide conI se
p = 2M, M ∈ Z =⇒ p
2∈ Z;
se p è pari, viceversa, avremo eph = I. Il centro è quindi
Z (su(2)) =
{I, eph
∣∣∣p=1
}=
{I, exp
(4πi
1/2︸︷︷︸〈α,α〉
hΛ︷ ︸︸ ︷1
2hα1
)}= {I, e4πihα1};
consideriamo Γ(n1); la condizione di appartenenza 2.6.2 si scrive
n1 ·1
2∈ Z =⇒ n1 pari.
Quindi su(2) è un’algebra che dà luogo a due gruppi: SU(2) e SU(2)/Z2, e le rappresentazioni di su(2)
che si esponenziano a dare rappresentazioni di SU(2)/Z2 sono quelle con n1 pari (corrispondenti,
in meccanica quantistica, alle realizzazioni di spin intero del momento angolare), cioè 1,3,5, . . .
2.6. Dalle algebre ai gruppi 99
• su(3).Z (su(3)) 3 I; cerchiamo altri elementi del centro. I candidati sono elementi del tipo exp
(p1h1 + p2h2
).
Perché un elemento del genere non coincida con I, deve essere
p1
(A−1
)11
+ p2
(A−1
)126∈ Z
e/op1
(A−1
)21
+ p2
(A−1
)226∈ Z.
Ricordando cheA−1 =
(2/3 1/31/3 2/3
)si verifica facilmente che le scelte {
p1 = 1
p2 = 0
e {p1 = 0
p2 = 1
costituiscono due soluzioni indipendenti. Non esistono altre soluzioni indipendenti, perciò il nucleodi su(3) sarà
Z (su(3)) = {I, eh1 , eh2} ∼ Z3.
Considero Γ(n1, n2); per la 2.6.2, si ha che
– eh1 ∈ Ker Γ(n1, n2) se2
3n1 +
1
3n2 ∈ Z,
– eh2 ∈ Ker Γ(n1, n2) se1
3n1 +
2
3n2 ∈ Z.
In definitiva, su(3) è l’algebra associata ai due gruppi di Lie SU(3) e SU(3)/Z3, e le rappresentazioni
di su(3) che si esponenziano a dare rappresentazioni di SU(3)/Z3 sono quelle che soddisfano le
condizioni di cui sopra, che si possono anche riscrivere nella forma
n1 − n2
3∈ Z;
ossia le rappresentazioni Γ(1, 1),Γ(0, 3),Γ(3, 0), . . .
• Si può mostrare in generale che il centro di SU(n) è isomorfo al gruppo ciclico Zn. Ad esempio,Z (su(4)) ∼ Z4; questo possiede il sottogruppo invariante non banale Z2, quindi su(4) è l’algebraassociata ai tre distinti gruppi di Lie SU(4),SU(4)
/Z2 e SU(4)
/Z4.
Bibliografia
J.F. Cornwell. Group Theory in Physics. Academic Press, London, 1984.
G.L. Naber. Topology, Geometry, and Gauge Fields - Foundations, 2nd edition. Springer, New York,2011.
W. Rudin. Real and Complex Analysis. McGraw and Hill, Singapore, 1987.
F.W. Warner. Foundations of Differentiable Manifolds and Lie Groups. Scott, Foresman and Company,Glenview, IL, 1971.
Questo documento è pubblicato secondo il testo della licenza libera CC BY-SA 3.0. 2012-13