Corpo rigido. Solido ideale indeformabile. Sistema di punti materiali, le cui posizioni reciproche rimangono immutate. E’ un’approssimazione, come già il concetto di punto materiale. Le forze interne hanno l’unico compito di garantire la rigidità: non fanno lavoro e non saranno considerate. cost BC cost AC cost AB cost 2 2 2 2 2 AB AC AB AC AB AC BC A B C cost C ˆ cost B ˆ cost A ˆ distanze e angoli costanti In quanto sistema di punti materiali, valgono per esso le equazioni generali: (E) TOT E cm TOT M dt L d R a m ) ( Le forze interne non compiono lavoro: K EXT TOT E W W M dt L d R a m cm
Transcript
Corpo rigido.
Solido ideale indeformabile. Sistema di punti materiali, le cui posizioni reciproche
rimangono immutate. E’ un’approssimazione, come già il concetto di punto materiale.
Le forze interne hanno l’unico compito di garantire la rigidità:
non fanno lavoro e non saranno considerate.
costBC
costAC
cost
AB
cost
222
22
ABACABAC
ABACBC
A
B C
costC
costB
cost A
distanze e angoli costanti
In quanto sistema di punti materiali, valgono
per esso le equazioni generali:
(E)TOT
E
cmTOT
Mdt
Ld
Ram
)(
Le forze interne non compiono lavoro:
KEXTTOT EWW
Mdt
Ld
Ram cm
Corpo rigido. Descrizione del moto
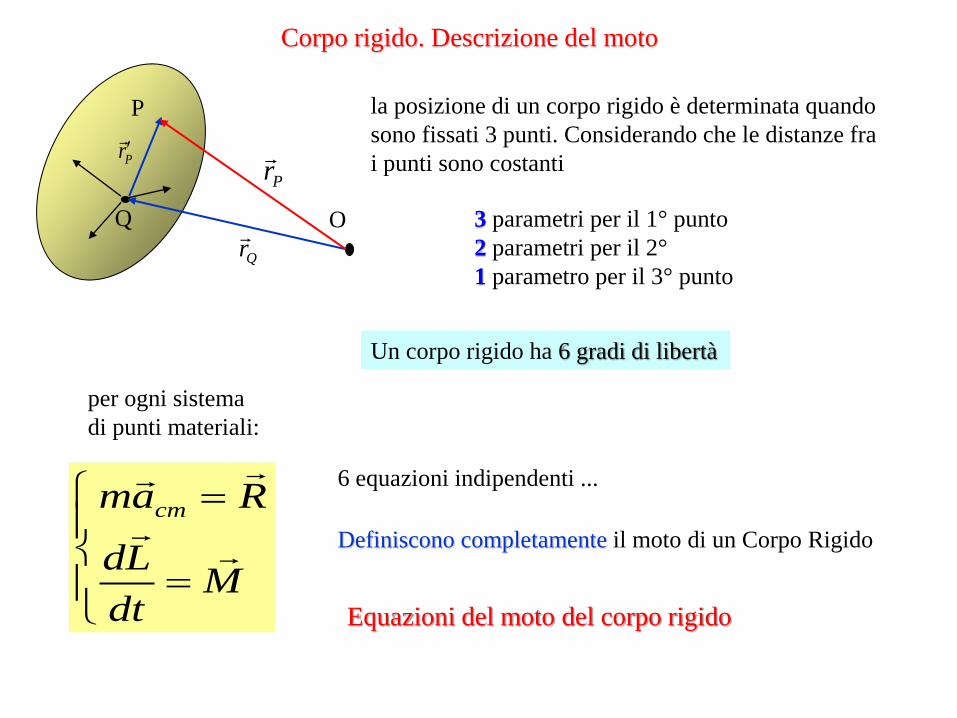
Un corpo rigido ha 6 gradi di libertà
O
Qr
Pr
Q
P
Pr
per ogni sistema
di punti materiali:
Definiscono completamente il moto di un Corpo Rigido
Mdt
Ld
Ram cm
6 equazioni indipendenti ...
la posizione di un corpo rigido è determinata quando
sono fissati 3 punti. Considerando che le distanze fra
i punti sono costanti
3 parametri per il 1° punto
2 parametri per il 2°
1 parametro per il 3° punto
Equazioni del moto del corpo rigido
Corpo rigido. Descrizione del moto
O
Qr
Pr
Q
P
Pr
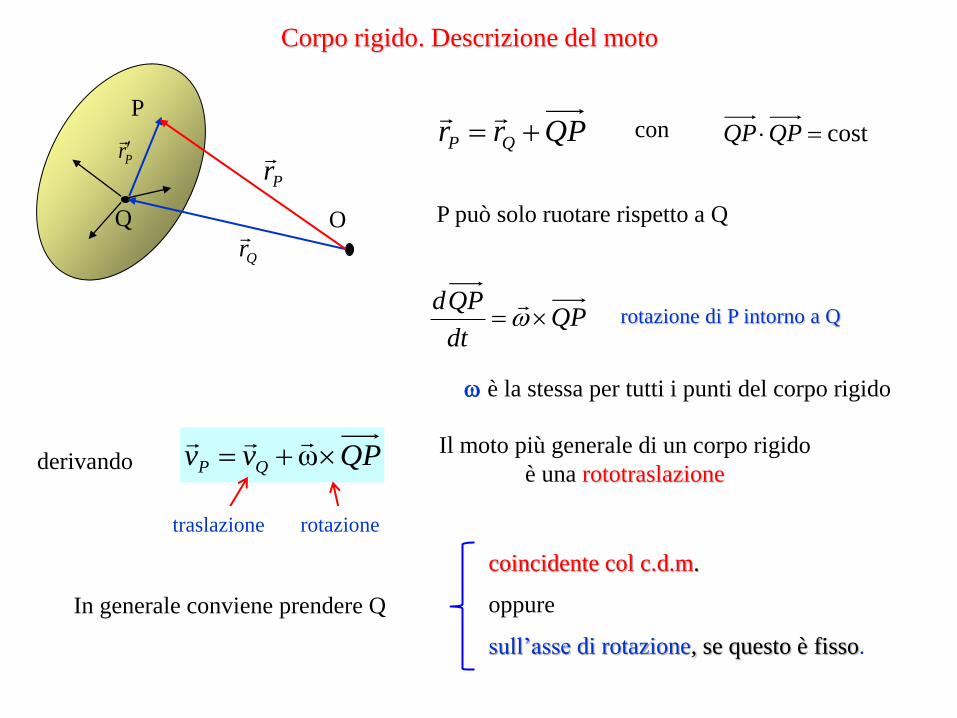
QPrr QP
derivando
con
QPdt
QPd
rotazione di P intorno a Q
Il moto più generale di un corpo rigido
è una rototraslazione
è la stessa per tutti i punti del corpo rigido
In generale conviene prendere Q
costQPQP
coincidente col c.d.m.
oppure
sull’asse di rotazione, se questo è fisso.
QPvv QP ω
rotazione traslazione
P può solo ruotare rispetto a Q
Corpo rigido. Descrizione del moto
Equazioni del moto
di un corpo rigido
Mdt
Ld
Ram cm
Pura traslazione
tutto si riassume nel moto del cdm
cmamR
Pura rotazione
con asse fisso
Mdt
Ld
La dinamica si riduce a:
se si calcolano i momenti rispetto
ad un polo sull’asse di rotazione.
Rototraslazione
k
kk
TOT
cm rmm
r 1
dVrρm
rcm 1
Centro di massa di un sistema continuo
dVrdmrrm
dV
Corpi continui
I corpi estesi sono spesso considerati continui. Ciò va inteso in senso macroscopico
(volumi “infinitesimi” macroscopicamente, ma grandi dal punto di vista atomico).
E’ utile definire la massa per unità di volume (densità volumica o densità):
dS
dmS densità superficiale:
2dim
m
kgS
d
dmL densità lineare:
m
kgL dim
Corpo omogeneo: è uniforme. In tal caso:
3
dimm
kg
dV
dm densità in genere zyx ,,
V
dVm
Vm
V
cm VrV
r d1
se il corpo è omogeneo:
Centro di massa e simmetria
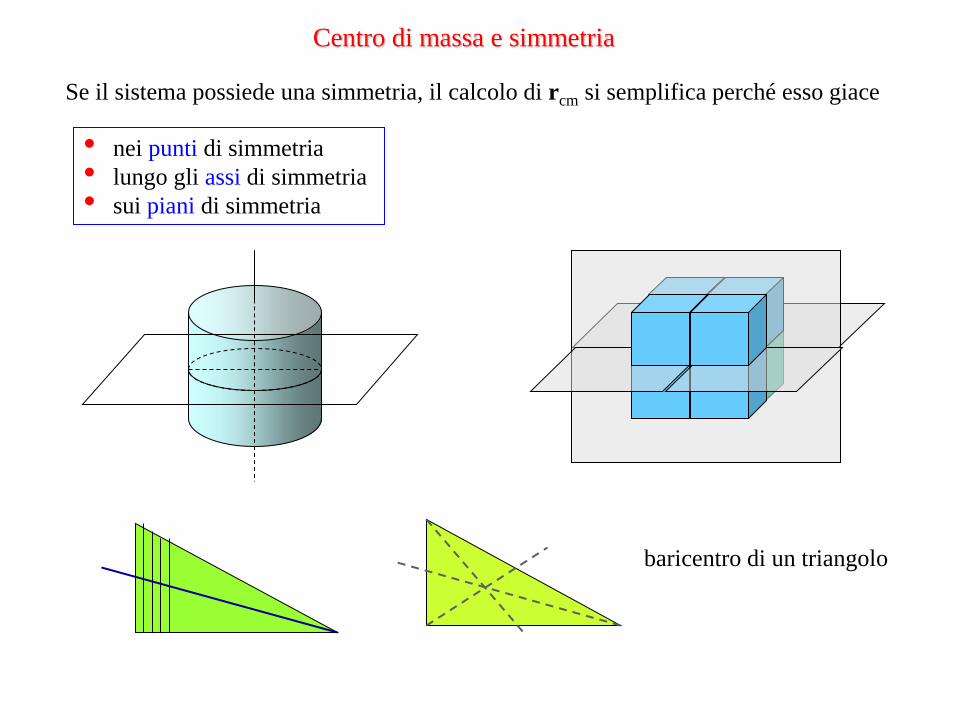
• nei punti di simmetria
• lungo gli assi di simmetria
• sui piani di simmetria
Se il sistema possiede una simmetria, il calcolo di rcm si semplifica perché esso giace
baricentro di un triangolo
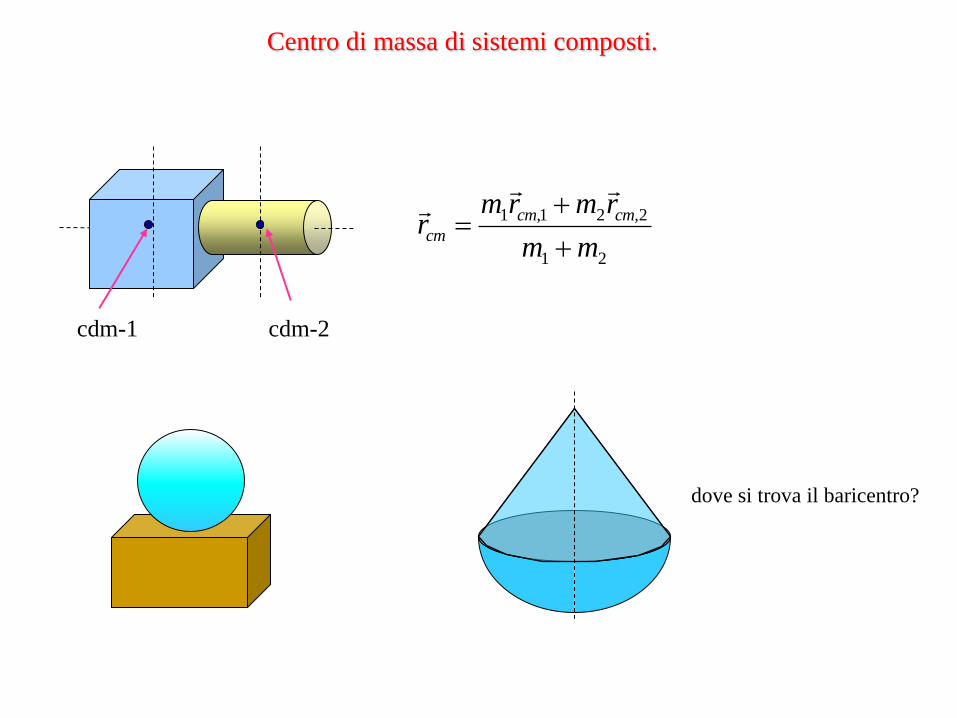
Centro di massa di sistemi composti.
21
2211
mm
rmrmr cm,cm,
cm
dove si trova il baricentro?
cdm-1 cdm-2
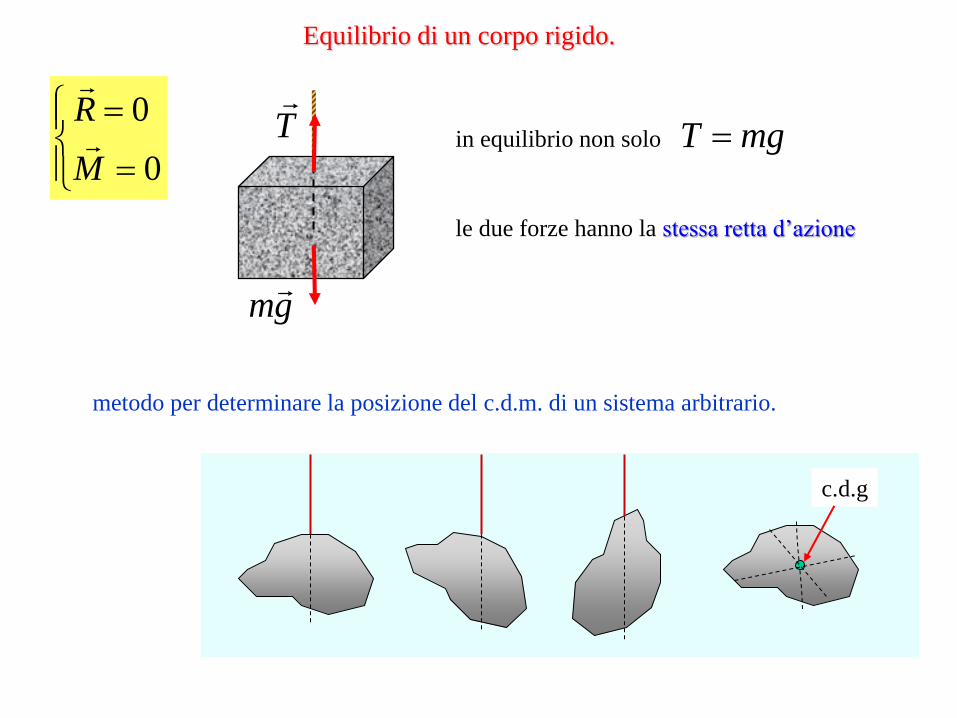
Equilibrio di un corpo rigido.
metodo per determinare la posizione del c.d.m. di un sistema arbitrario.
in equilibrio non solo
c.d.g
0
0
M
R
T
gm
mgT
le due forze hanno la stessa retta d’azione
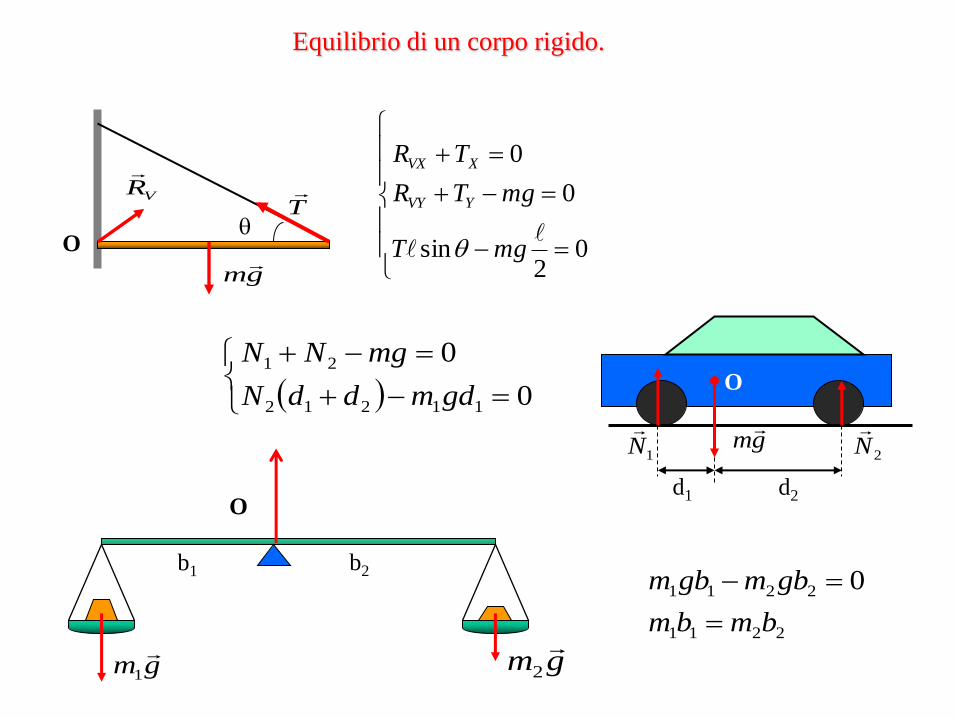
Equilibrio di un corpo rigido.
gm
TVR
02
sin
0
0
mgT
mgTR
TR
YVY
XVX
0
0
11212
21
gdmddN
mgNN
2211
2211 0
bmbm
gbmgbm
O
gm
1N
2N
d1 d2
O
gm
1gm
2
b1 b2
O
gm
gm
1N
2N
1N
2N
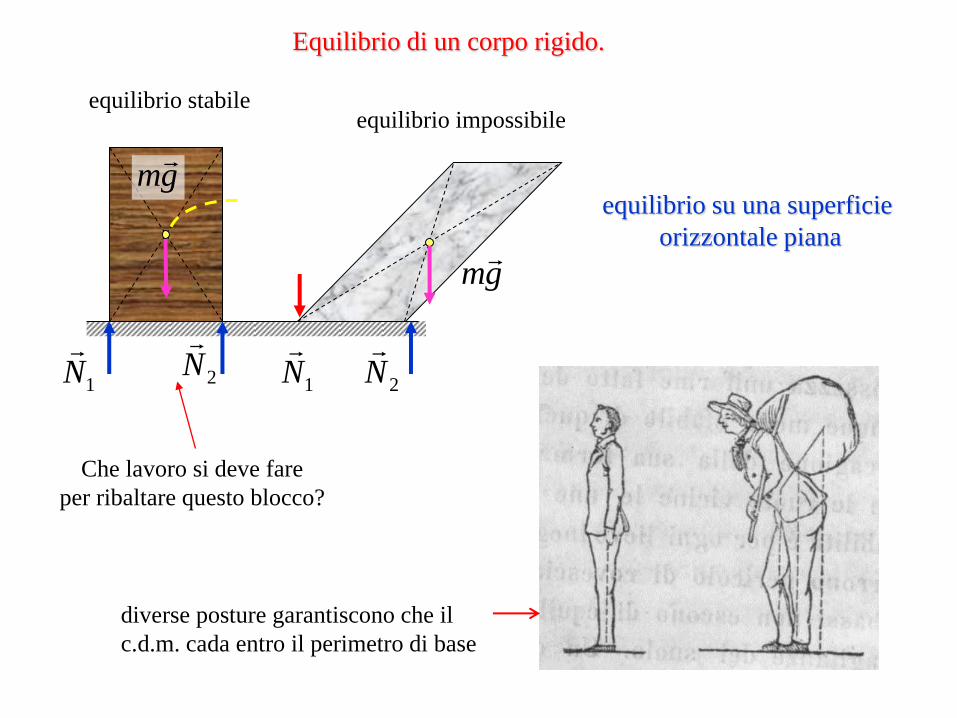
equilibrio impossibile equilibrio stabile
equilibrio su una superficie
orizzontale piana
Equilibrio di un corpo rigido.
Che lavoro si deve fare
per ribaltare questo blocco?
diverse posture garantiscono che il
c.d.m. cada entro il perimetro di base
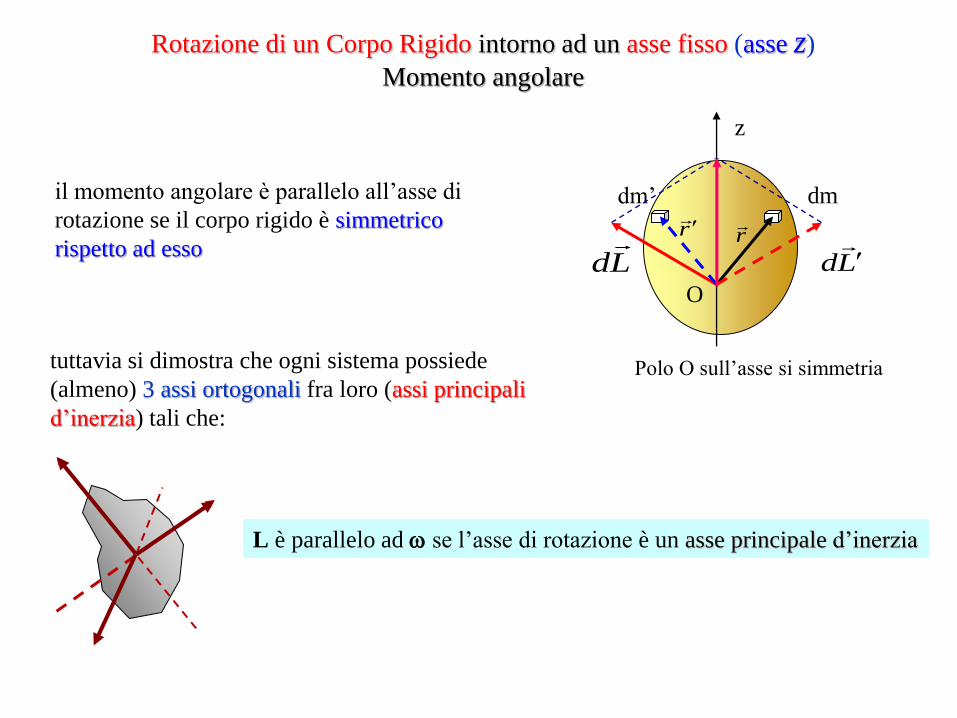
Rotazione di un Corpo Rigido intorno ad un asse fisso (asse z)
Momento angolare
In generale L NON E’ parallelo all’asse di rotazione (cioè ad
sin2rdmdmrvdL sinrRv
in questo caso si scelga un polo O sull’asse di rotazione
VV
dVvrdmvrL
O
z
R
Ld
r
dm
Ld
O
L
z
in tal caso è necessario un momento
per mantenere il corpo in rotazione 0dt
LdM
L è parallelo ad se l’asse di rotazione è un asse principale d’inerzia
tuttavia si dimostra che ogni sistema possiede
(almeno) 3 assi ortogonali fra loro (assi principali
d’inerzia) tali che:
O
dm
z
dm’
Ld
Ld r
r
Polo O sull’asse si simmetria
Rotazione di un Corpo Rigido intorno ad un asse fisso (asse z)
Momento angolare
il momento angolare è parallelo all’asse di
rotazione se il corpo rigido è simmetrico
rispetto ad esso
[si suppone che non ci senza attrito sull’asse di rotazione (albero)] b
F
F
un momento ortogonale all’asse non ha effetto sul moto
dt
dLM Z
Z basta la componente z (lungo l’asse):
Se l’asse di rotazione è fisso c’è un solo grado di libertà: il problema si semplifica
Rotazione di un Corpo Rigido intorno ad un asse fisso (asse z)
2
, kkZk RmL Caso discreto: la massa mk a distanza Rk dall’asse contribuisce
Z
k
kkZ IRmL
2 momento d’inerzia del corpo
rigido rispetto all’asse di
rotazione z
Rotazione di un corpo rigido. Momento d’inerzia.
dVyxIZ 22
distanza dall’asse
123 2mkgI grandezza scalare
ZZ IL dove
K
kkZ RmI 2
dVRdmRIZ
22
(sistema discreto)
(sistema discreto)
momento d’inerzia
del corpo rigido rispetto
all’asse di rotazione Z
Se l’asse di rotazione coincide con un asse di simmetria ( più in
generale un asse principale d’inerzia) vale anche la relazione
vettoriale:
ZIL
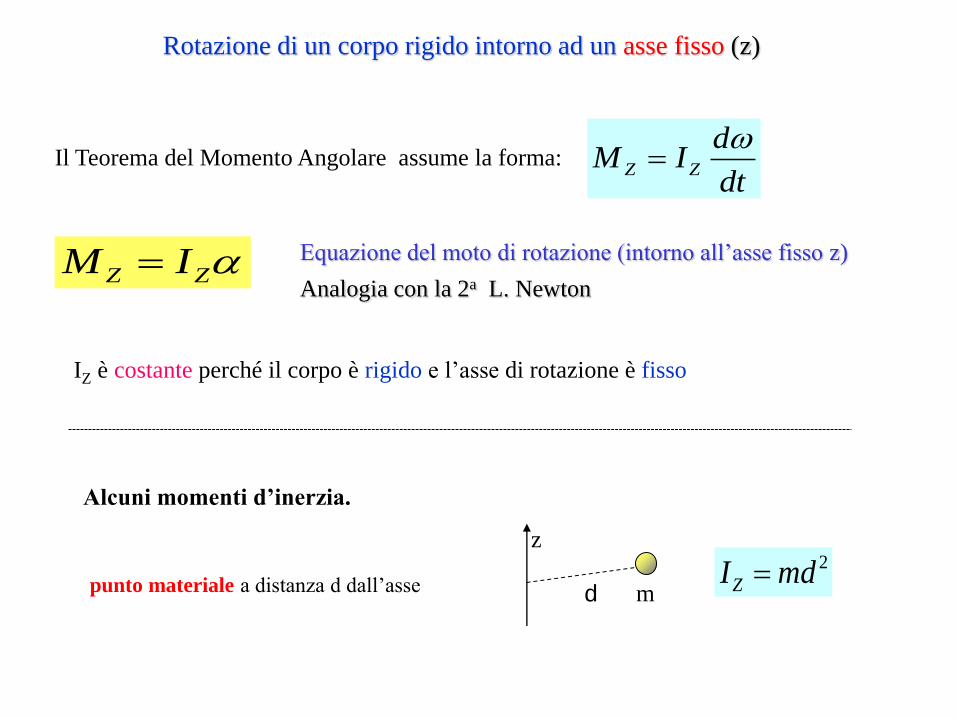
Rotazione di un corpo rigido intorno ad un asse fisso (z)
Il Teorema del Momento Angolare assume la forma:
ZZ IM
IZ è costante perché il corpo è rigido e l’asse di rotazione è fisso
Equazione del moto di rotazione (intorno all’asse fisso z)
Analogia con la 2a L. Newton
dt
dIM ZZ
2mdIZ d m
z
punto materiale a distanza d dall’asse
Alcuni momenti d’inerzia.
2
12
mIZ
sbarra di massa m, lunghezza ,
risp. asse ortogonale passante per il cdm:
Anello, rispetto
al proprio asse.
2mRI Z
2
2R
mI Z
Cerchio, rispetto
al proprio asse.
Sfera piena risp. ad un asse.
2
5
2mRI Z
Momenti d’inerzia di alcuni solidi omogenei
R
Cilindro, rispetto
al proprio asse.
2
2R
mI Z
rispetto ad un asse passante per il c.d.m.
Guscio sferico.
2
3
2mRIZ
R
R
h
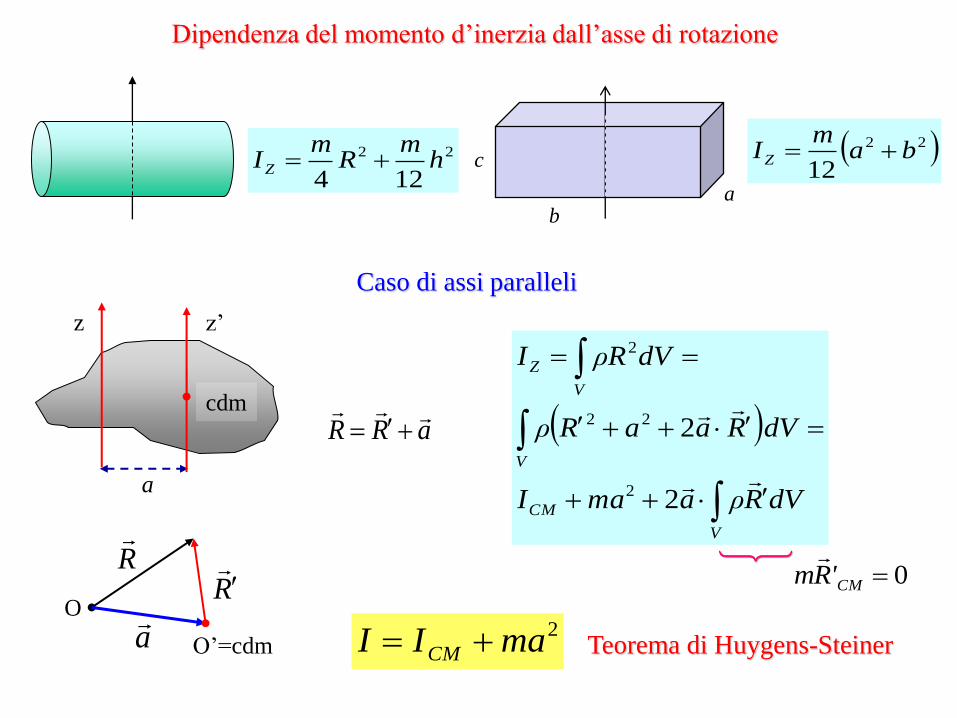
Dipendenza del momento d’inerzia dall’asse di rotazione
dVRρamaI
dVRaaRρ
dVRρI
V
CM
V
V
Z
2
2
2
22
2
0CM'Rm
2maII CM
123
Caso di assi paralleli
Teorema di Huygens-Steiner
22
124h
mR
mIZ
z z’
a
cdm
aRR
O
O’=cdm
R
R
a
b
c
a
22
12ba
mIZ
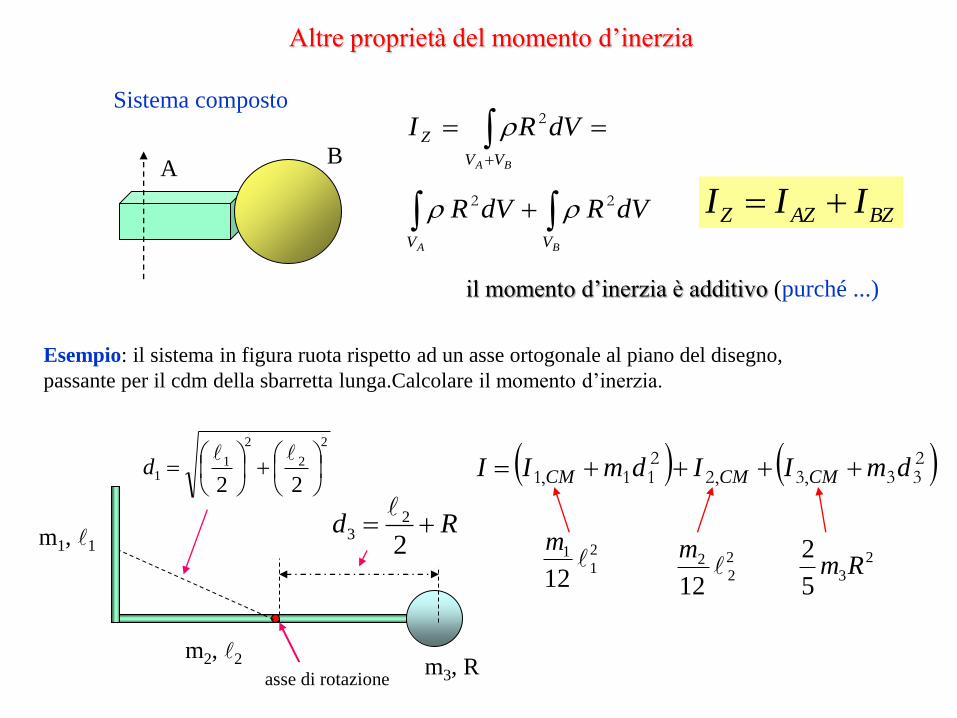
Altre proprietà del momento d’inerzia
Sistema composto
BA
BA
VV
VV
Z
dVRdVR
dVRI
22
2
A B
BZAZZ III
Esempio: il sistema in figura ruota rispetto ad un asse ortogonale al piano del disegno,
passante per il cdm della sbarretta lunga.Calcolare il momento d’inerzia.
m1, 1
m2, 2 m3, R
Rd 2
23
2
2
2
11
22
d 2
33,3,2211,1 dmIIdmII CMCMCM
asse di rotazione
2
11
12
m2
22
12
m 2
35
2Rm
il momento d’inerzia è additivo (purché ...)
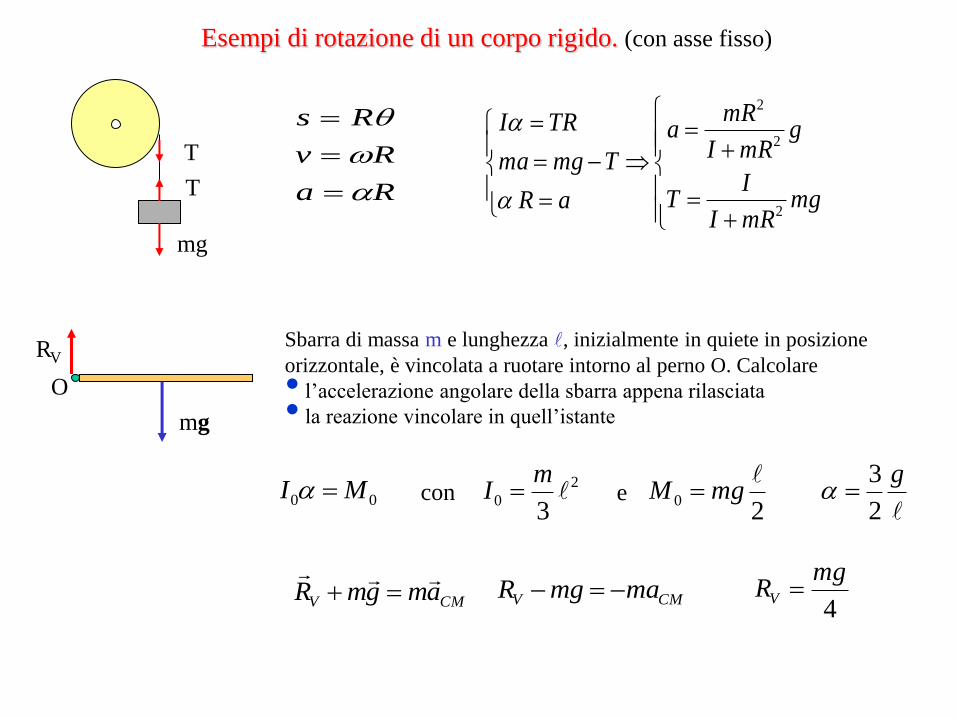
Esempi di rotazione di un corpo rigido. (con asse fisso)
mg
T
T
mgmRI
IT
gmRI
mRa
aR
Tmgma
TRI
2
2
2
Ra
Rv
Rs
Sbarra di massa m e lunghezza , inizialmente in quiete in posizione
orizzontale, è vincolata a ruotare intorno al perno O. Calcolare
• l’accelerazione angolare della sbarra appena rilasciata
• la reazione vincolare in quell’istante mg
RV
O
00 MI 2
03
m
I 2
0
mgM con e
g
2
3
CMV amgmR
CMV mamgR 4
mgRV
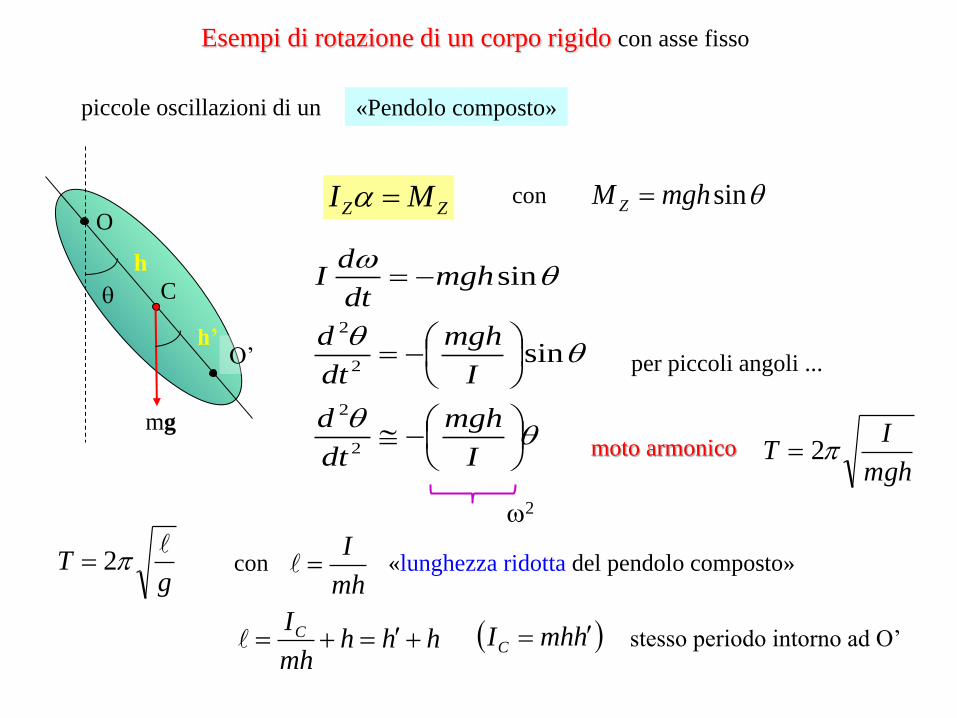
Esempi di rotazione di un corpo rigido con asse fisso
«Pendolo composto»
I
mgh
dt
d
I
mgh
dt
d
mghdt
dI
2
2
2
2
sin
sin
mgh
IT 2
2
per piccoli angoli ...
piccole oscillazioni di un
ZZ MI
moto armonico
mh
Icon «lunghezza ridotta del pendolo composto»
hhhmh
IC
gT
2
mg
O
C
h
O’ h’
hmhIC stesso periodo intorno ad O’
sinmghM Z con
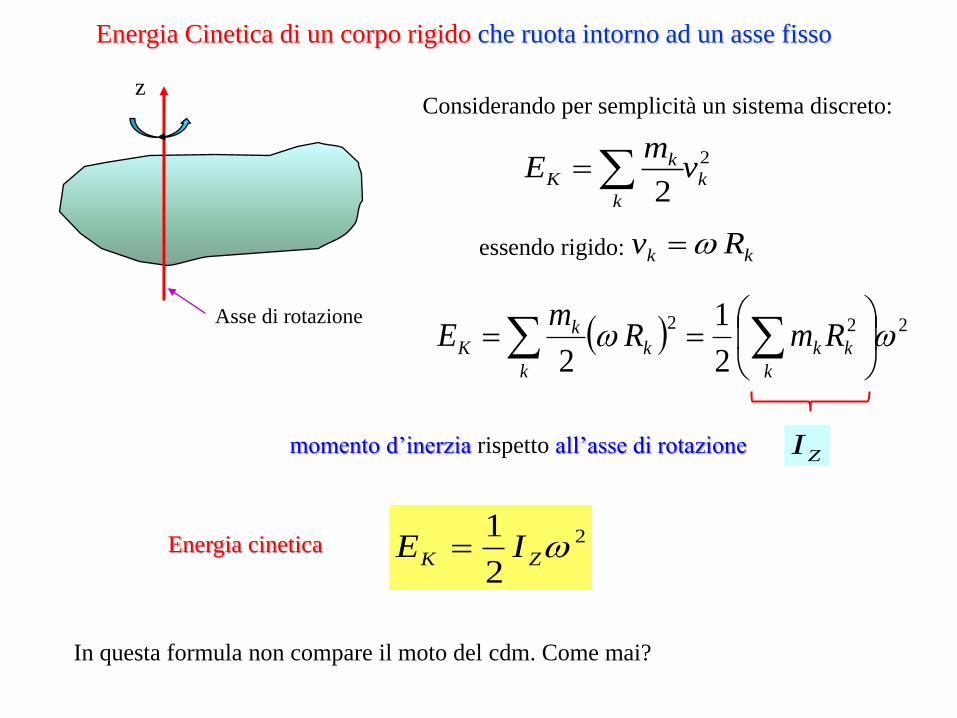
2
2k
k
kK v
mE
2
2
1ZK IE
Energia Cinetica di un corpo rigido che ruota intorno ad un asse fisso
Energia cinetica
z
Asse di rotazione
Considerando per semplicità un sistema discreto:
222
2
1
2
k
kkk
k
kK RmR
mE
essendo rigido:
ZImomento d’inerzia rispetto all’asse di rotazione
In questa formula non compare il moto del cdm. Come mai?
kk Rv
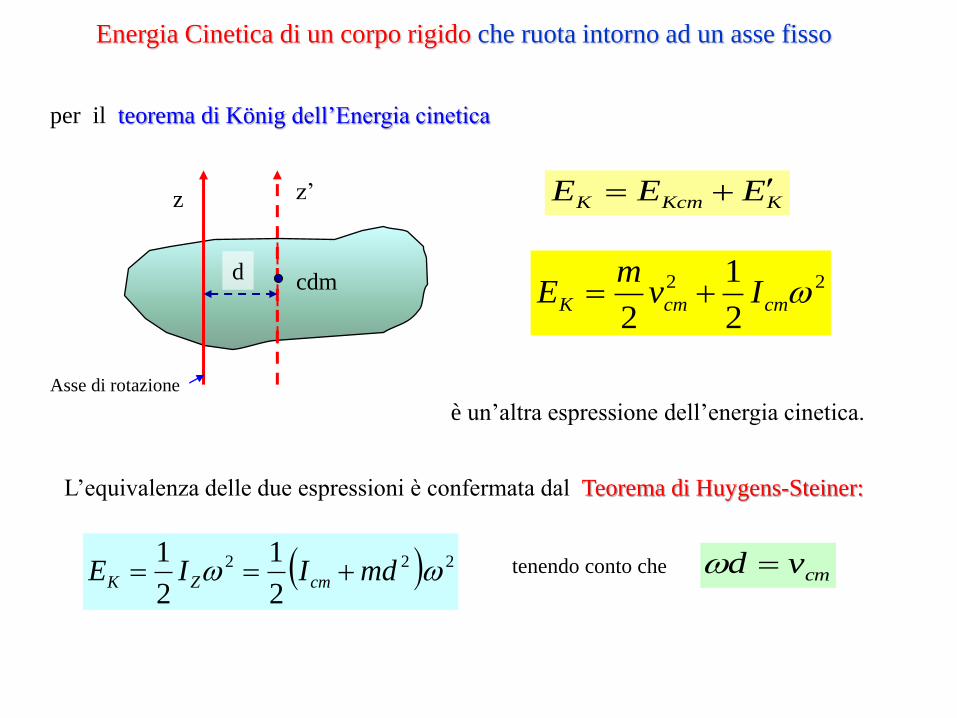
cmvd
Energia Cinetica di un corpo rigido che ruota intorno ad un asse fisso
KKcmK EEE
222
2
1
2
1 mdIIE cmZK
L’equivalenza delle due espressioni è confermata dal Teorema di Huygens-Steiner:
per il teorema di König dell’Energia cinetica
22
2
1
2cmcmK Iv
mE
è un’altra espressione dell’energia cinetica.
tenendo conto che
z z’
d cdm
Asse di rotazione
Energia potenziale di un corpo rigido (forza peso)
Le forze peso che agiscono sulle singole parti di un corpo rigido sono equivalenti alla
forza peso totale applicata nel centro di massa.
L’energia potenziale della forza peso dipende solo dalla posizione del centro di massa.
cmP mgyE
come per ogni sistema di punti materiali, inoltre:
Teorema dell’energia cinetica: KTOT EW
Teorema di conservazione dell’energia meccanica
se tutte le forze sono conservative: costEEE PKM
in presenza di forze non conservative: MNC EW
(l’unica particolarità è che nel corpo rigido le forze interne non fanno lavoro)
Moto di puro rotolamento
s
R
Ra
Rv
Rs
moto di rototraslazione in cui il punto di contatto P
ha velocità nulla rispetto alla superficie d’appoggio
OAωvv OA
centro istantaneo
di rotazione
PAωvv PA
P
O A
vA
R
v0
pura rotazione istantanea
intorno a P
In P agiscono le forze di contatto N e fS (attrito statico se il moto è di puro rotolamento).
PAωvA
rotazione + traslazione
12
3
due modi
di vedere
il moto
ωRvO
Dinamica del rotolamento
1° caso) F forza esterna applicata nel cdm
rotazione rispetto al cdm O
RI
mgN
maF
S
S
f
0
f
0
con Ra
mgN
mRI
IF
mRI
FRa
S 2
0
0
2
0
2
f
Condizione di rotolamento
mgN SSS f
rotazione rispetto a P
fS
F
N mg
P
O
S
Nota 1: fS > 0: l’attrito ha lo stesso verso del disegno
(opposto ad F). Non è sempre così. A volte favorisce
il moto di traslazione (v. prossimo esempio)
Nota 2: se F=0 allora fS=0
FRI
mgN
maF
P
S
0
f
con 2mRII OP
Teor. moto cdm
su un piano orizzontale il rotolamento non si
fermerebbe mai (ma c’è l’attrito volvente).
0
2
0
I
mRImgF S
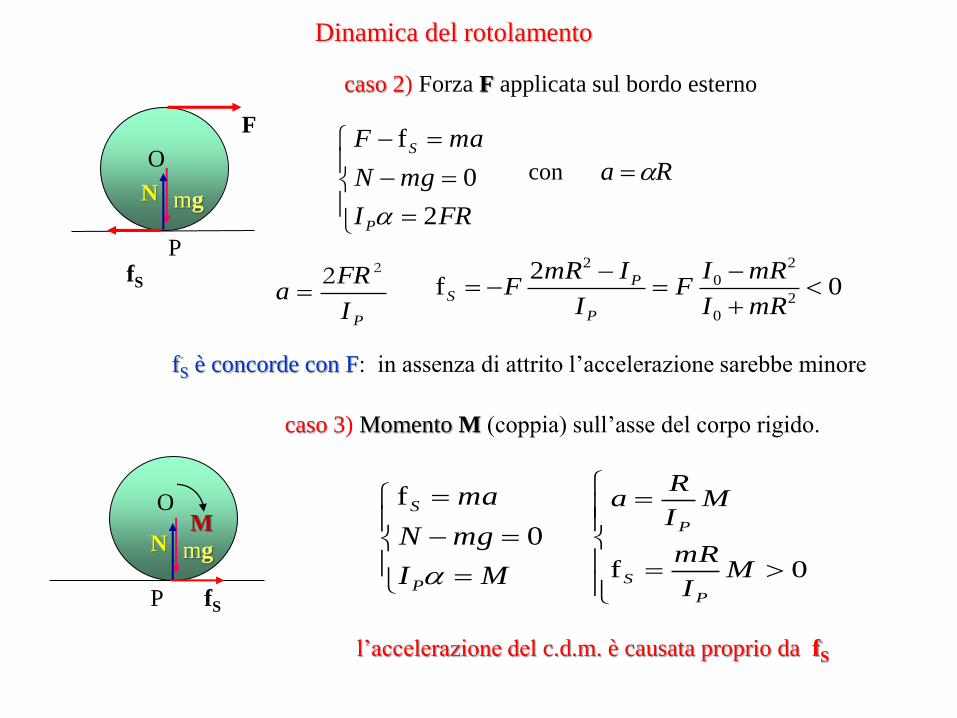
Dinamica del rotolamento
fS
F
N mg
P
O
FRI
mgN
maF
P
S
2
0
f
con Ra
PI
FRa
22
fS è concorde con F: in assenza di attrito l’accelerazione sarebbe minore
caso 3) Momento M (coppia) sull’asse del corpo rigido.
MI
mgN
ma
P
S
0
f
fS
N mg
P
O M
0f MI
mR
MI
Ra
P
S
P
l’accelerazione del c.d.m. è causata proprio da fS
02
f2
0
2
0
2
mRI
mRIF
I
ImRF
P
PS
caso 2) Forza F applicata sul bordo esterno
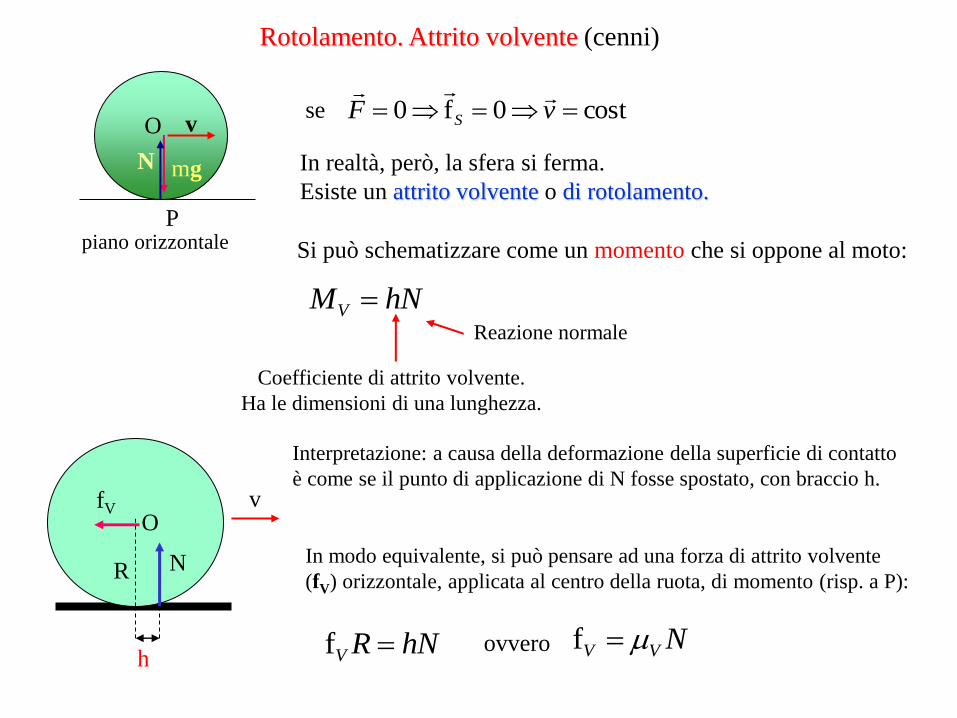
Rotolamento. Attrito volvente (cenni)
N mg
P
O v cost0f0 vF S
In realtà, però, la sfera si ferma.
Esiste un attrito volvente o di rotolamento.
piano orizzontale Si può schematizzare come un momento che si oppone al moto:
hNMV Reazione normale
Coefficiente di attrito volvente.
Ha le dimensioni di una lunghezza.
R
v
h
N
O fV
Interpretazione: a causa della deformazione della superficie di contatto
è come se il punto di applicazione di N fosse spostato, con braccio h.
se
In modo equivalente, si può pensare ad una forza di attrito volvente
(fV) orizzontale, applicata al centro della ruota, di momento (risp. a P):
hNRV f NVV fovvero
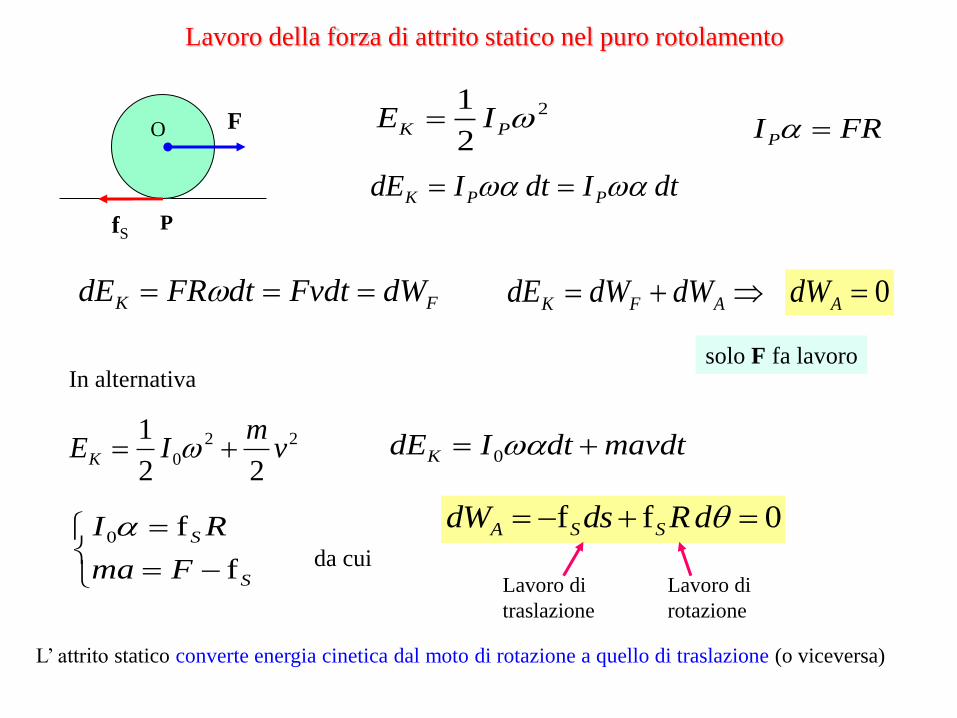
Lavoro della forza di attrito statico nel puro rotolamento
FRIP
AFK dWdWdE
dtIdtIdE PPK
solo F fa lavoro
F
fS P
O
22
022
1v
mIEK
2
2
1PK IE
FK dWFvdtdtFRdE
mavdtdtIdEK 0
S
S
Fma
RI
f
f0
In alternativa
0ff dRdsdW SSA
Lavoro di
rotazione
Lavoro di
traslazione
da cui
L’ attrito statico converte energia cinetica dal moto di rotazione a quello di traslazione (o viceversa)
0AdW
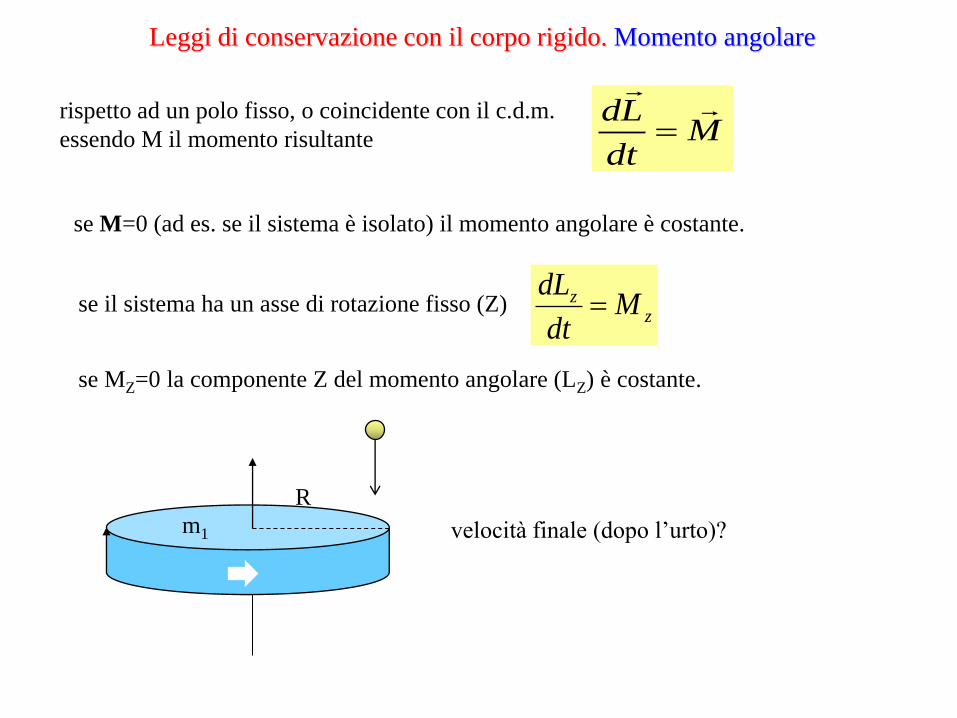
Leggi di conservazione con il corpo rigido. Momento angolare
rispetto ad un polo fisso, o coincidente con il c.d.m.
essendo M il momento risultante Mdt
Ld
se M=0 (ad es. se il sistema è isolato) il momento angolare è costante.
zz M
dt
dLse il sistema ha un asse di rotazione fisso (Z)
se MZ=0 la componente Z del momento angolare (LZ) è costante.
m1
R
velocità finale (dopo l’urto)?
Teorema del momento angolare Formulazione integrale
dtFrLΔ Se il punto di applicazione della forza non si sposta
nell’intervallo t di applicazione ... (forza impulsiva)
dtMLLLΔ if
Impulso del momento
JrdtFrLΔ
JrLΔ
Teorema del momento dell’impulso Momento dell’impulso
dtMΔL zz zz JrΔL
Se il sistema ruota intorno ad un asse fisso Z:
JrLΔ
JdΔLz
O
J
d
zz IΔL
Teorema del momento angolare. Formulazione integrale
calcolando i momenti rispetto ad O (sull’asse di rotazione)
dal teorema del moto del c.d.m.
EXTicmfcm Jvvm
,,con
2,
ffcmv
VEXT JJJ
calcolare f e
VJ
mostrare che JV=0 se 3
2d
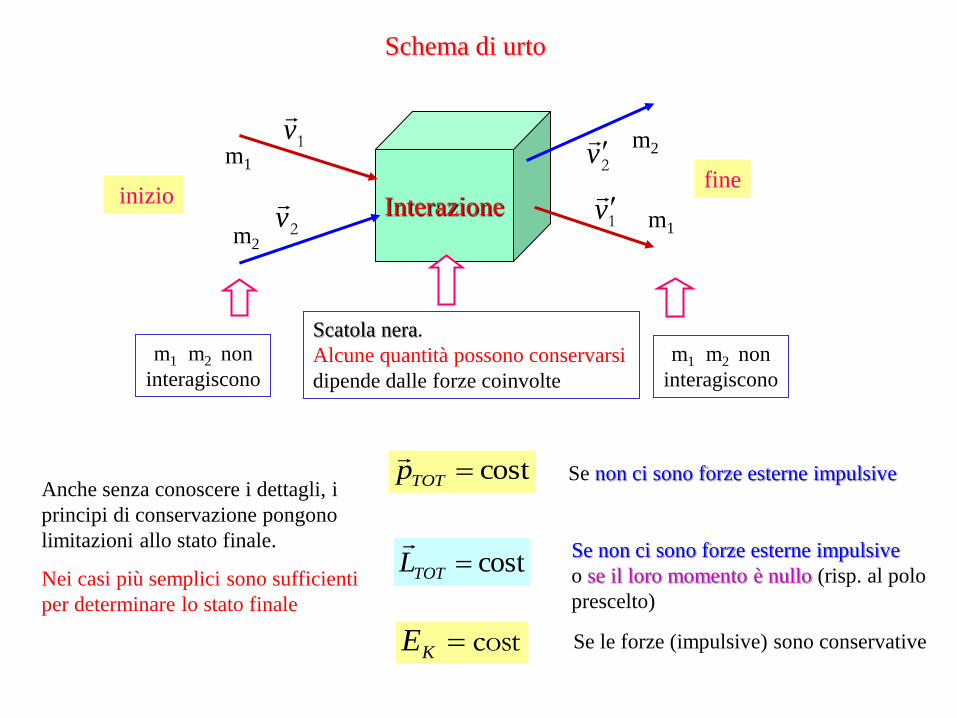
inizio fine
Scatola nera.
Alcune quantità possono conservarsi
dipende dalle forze coinvolte
m1 m2 non
interagiscono
m1 m2 non
interagiscono
Schema di urto
Interazione
m1
m2 m1
m2 1v
2v
1v 2v
costTOTp
costTOTL
costKE
Anche senza conoscere i dettagli, i
principi di conservazione pongono
limitazioni allo stato finale.
Nei casi più semplici sono sufficienti
per determinare lo stato finale
Se non ci sono forze esterne impulsive
Se non ci sono forze esterne impulsive
o se il loro momento è nullo (risp. al polo
prescelto)
Se le forze (impulsive) sono conservative
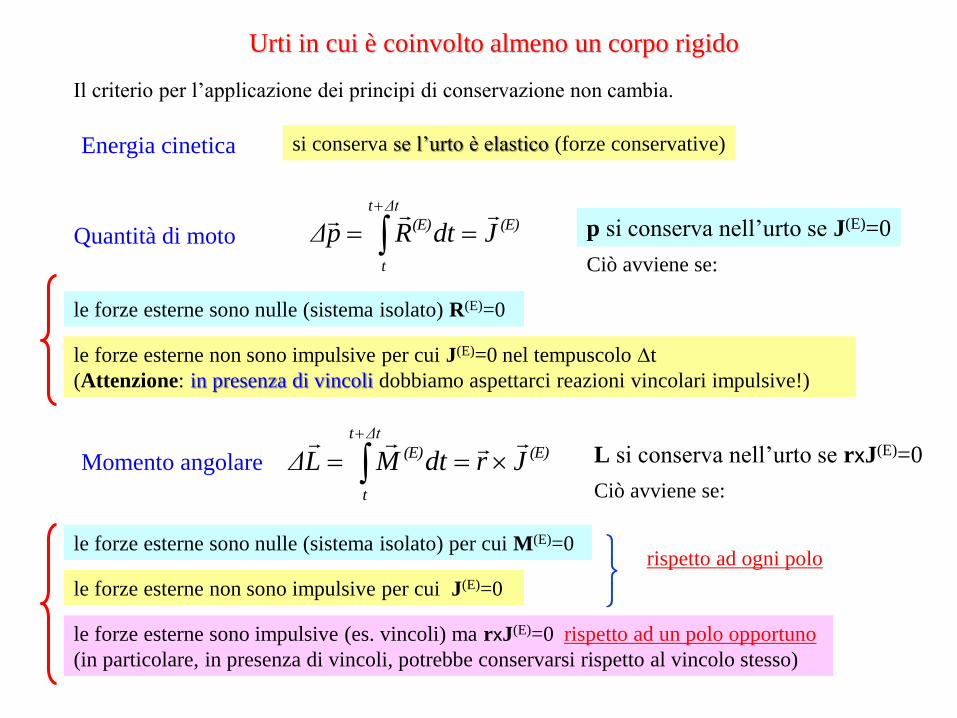
Urti in cui è coinvolto almeno un corpo rigido
Il criterio per l’applicazione dei principi di conservazione non cambia.
Energia cinetica si conserva se l’urto è elastico (forze conservative)
Quantità di moto
le forze esterne non sono impulsive per cui J(E)=0 nel tempuscolo t
(Attenzione: in presenza di vincoli dobbiamo aspettarci reazioni vincolari impulsive!)
(E)
Δtt
t
(E) JdtRpΔ
le forze esterne sono nulle (sistema isolato) R(E)=0
p si conserva nell’urto se J(E)=0
Ciò avviene se:
Momento angolare
le forze esterne sono nulle (sistema isolato) per cui M(E)=0
le forze esterne non sono impulsive per cui J(E)=0 12
3
rispetto ad ogni polo
(E)
Δtt
t
(E) JrdtMLΔ
L si conserva nell’urto se rxJ(E)=0
le forze esterne sono impulsive (es. vincoli) ma rxJ(E)=0 rispetto ad un polo opportuno
(in particolare, in presenza di vincoli, potrebbe conservarsi rispetto al vincolo stesso)
Ciò avviene se:
Esempio 1. Asta di massa M e lunghezza in quiete su un piano orizzontale liscio, colpita da un
“punto” di massa m e velocità v che vi resta attaccato.
Urto totalmente inelastico
p si conserva
L si conserva rispetto ad ogni polo
Sistema isolato. Quindi:
Urto inelastico: EK non si conserva.
CM asta CM asta + punto
all’impatto
m
v O a
b
La soluzione è piuttosto complicata, ma si ottiene a partire
dai due principi di conservazione
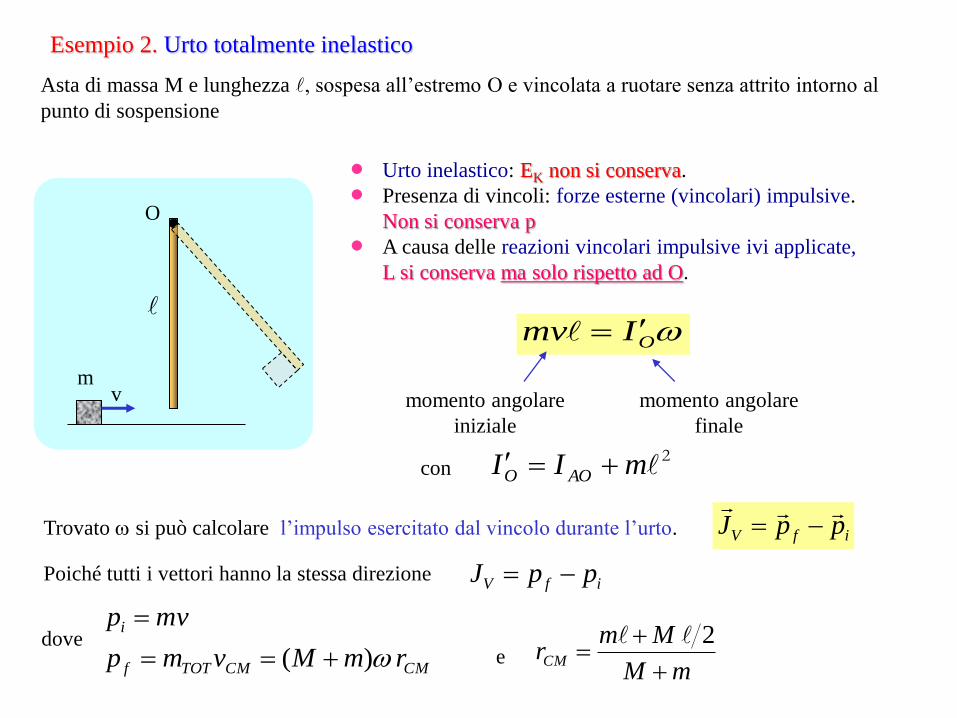
Esempio 2. Urto totalmente inelastico
Asta di massa M e lunghezza , sospesa all’estremo O e vincolata a ruotare senza attrito intorno al
punto di sospensione
Urto inelastico: EK non si conserva.
Presenza di vincoli: forze esterne (vincolari) impulsive.
Non si conserva p
A causa delle reazioni vincolari impulsive ivi applicate,
L si conserva ma solo rispetto ad O.
m v
O
OImv
2mII AOO
momento angolare
iniziale
momento angolare
finale
con
Trovato si può calcolare l’impulso esercitato dal vincolo durante l’urto. ifV ppJ
Poiché tutti i vettori hanno la stessa direzione ifV ppJ
CMCMTOTf
i
rmMvmp
mvp
)(
dove
e mM
MmrCM
2
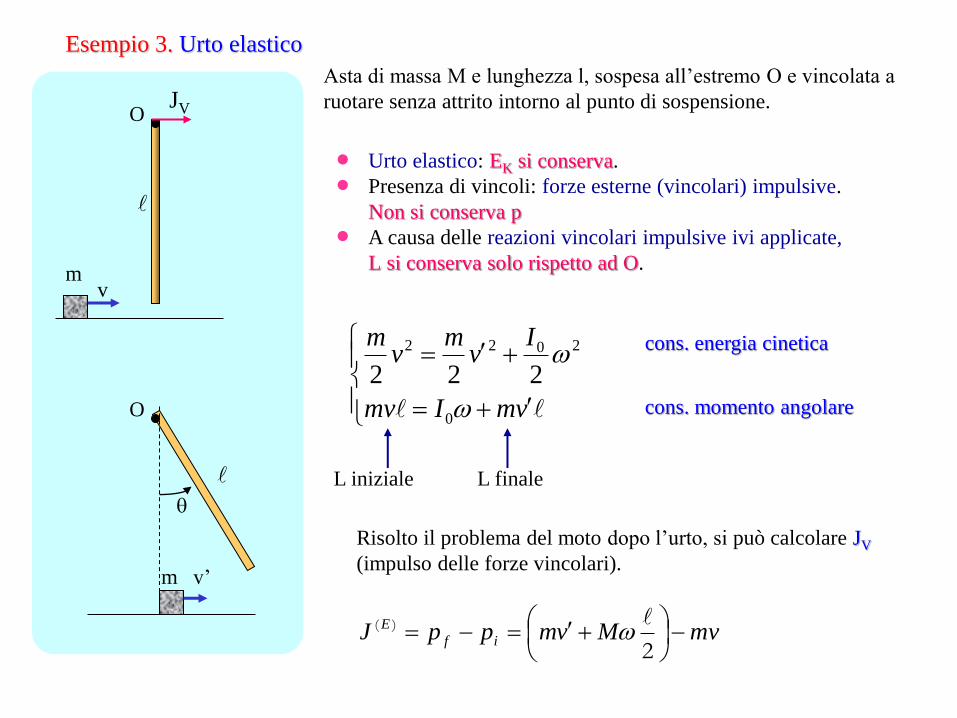
Esempio 3. Urto elastico
Asta di massa M e lunghezza l, sospesa all’estremo O e vincolata a
ruotare senza attrito intorno al punto di sospensione.
Urto elastico: EK si conserva.
Presenza di vincoli: forze esterne (vincolari) impulsive.
Non si conserva p
A causa delle reazioni vincolari impulsive ivi applicate,
L si conserva solo rispetto ad O. m
v
O
vmImv
Iv
mv
m
0
2022
222
m v’
O
cons. energia cinetica
cons. momento angolare
L iniziale L finale
JV
Risolto il problema del moto dopo l’urto, si può calcolare JV