51
ARDUINO Duemilanove Lelio Spadoni

ARDUINO Duemilanove
Lelio Spadoni
Argomenti trattati
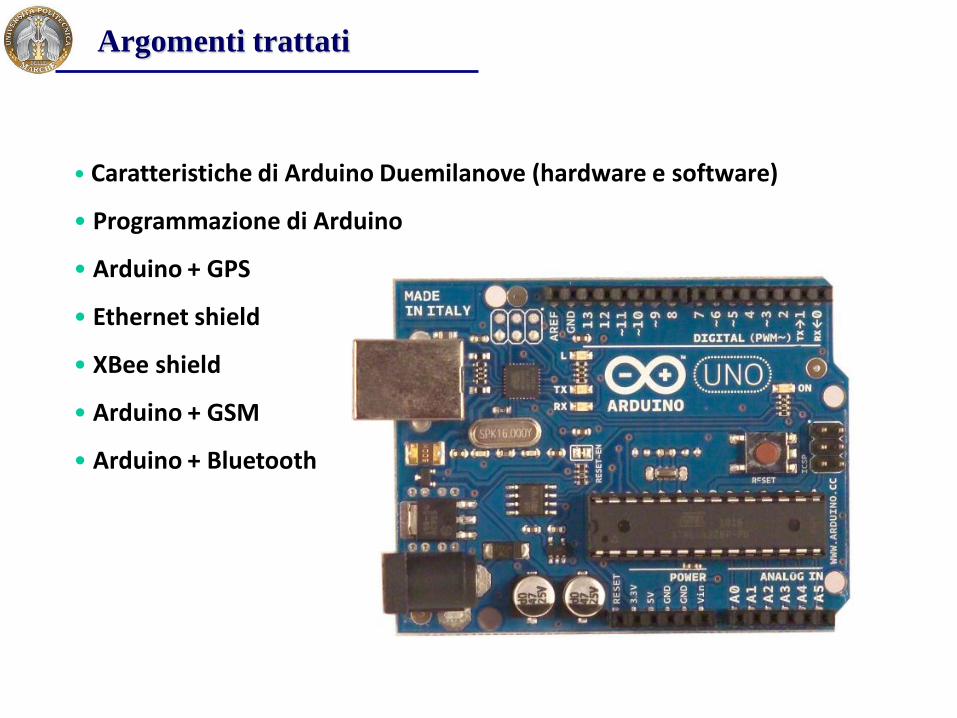
• Caratteristiche di Arduino Duemilanove (hardware e software)
• Programmazione di Arduino
• Arduino + GPS
• Ethernet shield
• XBee shield
• Arduino + GSM
• Arduino + Bluetooth

• 14 ingressi/uscite digitali di cui: 6 utilizzabili come uscite di tipo PWM; 4 utilizzabili per comunicazione SPI; 2 utilizzabili per comunicazione I2C; 2 utilizzabili per i collegamenti seriali TTL level; 2 utilizzabili per interrupt esterno; • 6 ingressi analogici (risoluzione 10 bits) • memoria SRAM 2KB; • memoria FLASH 32KB di cui 2 utilizzati per il bootloader; • memoria EEPROM 1KB • microcontrollore ATMEGA328 a 16 MHz
Arduino
Principali caratteristiche
• Il microcontrollore è fornito con un bootloader, che è un software che permette il caricamento dei programmi in memoria senza l’ausilio di programmatori esterni (occupa 2 KB di memoria flash).
• Il bootloader si mette in ascolto di comandi o dati in arrivo dal computer (che generalmente sono i programmi scritti dall’utente) e li carica nella memoria flash del microcontrollore; dopodiché viene lanciato il programma in memoria. Se non ci sono programmi in arrivo dal computer viene lanciato l’ultimo sketch* caricato. Se invece, il microcontrollore è vuoto viene lanciato in continuazione il bootloader.
Arduino
Principali caratteristiche
*programma scritto dall’utente

• Il software per la programmazione di tutti i tipi di schede Arduino, si chiama semplicemente Arduino.
• Ne esistono diverse versioni sia per Windows (quella testata in questo lavoro), sia per Linux sia per Mac.
• La versione utilizzata per le successive prove è la 0018.
Arduino
IDE

• Uno sketch si compone di due funzioni principali che non accettano nessun parametro e non restituiscono alcun valore:
- void setup() , tutte le istruzioni contenute all’interno di questa funzione vengono eseguite una sola volta al lancio dello sketch da parte del microcontrollore;
- void loop() , tutte le istruzioni contenute in questa funzione sono eseguite in continuazione.
• E’ sempre possibile inserire parti di programma all’interno di altre funzioni che vengono richiamate dal programma principale all’occorrenza.
Arduino
Programmazione

Arduino
Programmazione - Strutture e Costanti
• setup() • loop() • if • if...else • for • switch case
• while • do... while • break • continue • return
• HIGH | LOW • INPUT | OUTPUT • true | false
• Integer Constants

Arduino
Programmazione - Funzioni
Digital I/O • pinMode(pin, mode) • digitalWrite(pin, value) • int digitalRead(pin) Analog I/O • int analogRead(pin) • analogWrite(pin, value) Advanced I/O • tone() • noTone() • shiftOut(dataPin, clockPin, bitOrder, value) • unsigned long pulseIn(pin, value) Time • unsigned long millis() • unsigned long micros() • delay(ms) • delayMicroseconds(us)
Math • min(x, y) • max(x, y) • abs(x) • constrain(x, a, b) • pow(base, exponent) • sq(x) • sqrt(x) • map(value, fromLow, fromHigh,
toLow, toHigh)
Trigonometry • sin(rad) • cos(rad) • tan(rad)
Random Numbers • randomSeed(seed) • long random(max) • long random(min, max) Communication • Serial

• Di solito uno sketch utilizza delle librerie di comandi che consentono di controllare dei particolari dispositivi.
• Molte librerie per usi generali e per le comunicazioni, sono già pronte come ad esempio: SPI, I2C, Ethernet, ecc…; altre possono essere scritte dagli utenti a proprio uso e consumo.
• Le librerie vengono inserite con il comando
#include <SoftwareSerial.h>
Arduino
Programmazione - Librerie

int sensorPin = 0; int ledPin = 13; int sensorValue = 0; void setup() { pinMode(ledPin, OUTPUT); } void loop() { sensorValue = analogRead(sensorPin); digitalWrite(ledPin, HIGH); delay(sensorValue); digitalWrite(ledPin, LOW); delay(sensorValue); }
Arduino - Laboratorio “Il led collegato al pin 13 lampeggia con una frequenza proporzionale al valore di tensione letto sull’ingresso
analogico 0 regolato da un potenziometro”.
…per cominciare!

ARDUINO + GPS
Arduino - Laboratorio
GPS
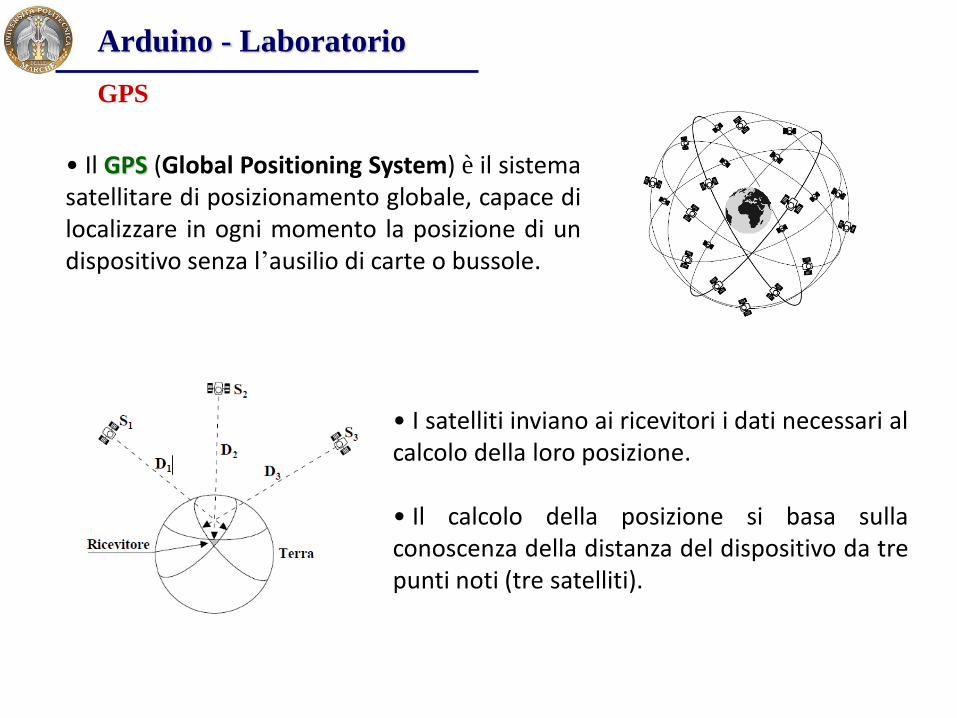
• Il GPS (Global Positioning System) è il sistema satellitare di posizionamento globale, capace di localizzare in ogni momento la posizione di un dispositivo senza l’ausilio di carte o bussole.
• I satelliti inviano ai ricevitori i dati necessari al calcolo della loro posizione.
• Il calcolo della posizione si basa sulla conoscenza della distanza del dispositivo da tre punti noti (tre satelliti).
Arduino - Laboratorio
GPS - NMEA
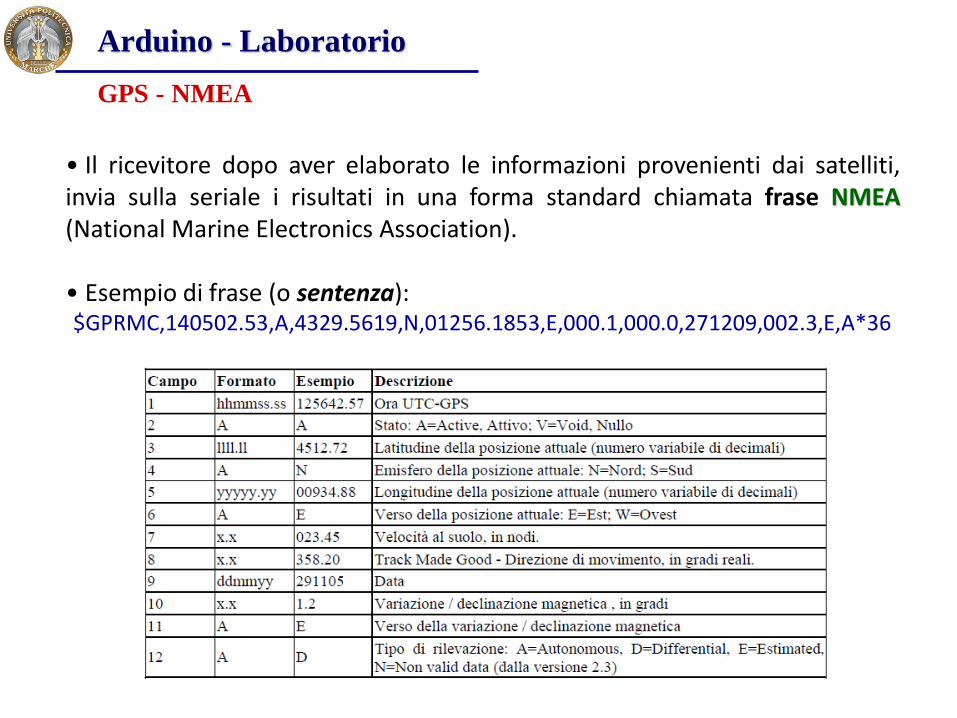
• Il ricevitore dopo aver elaborato le informazioni provenienti dai satelliti, invia sulla seriale i risultati in una forma standard chiamata frase NMEA (National Marine Electronics Association). • Esempio di frase (o sentenza): $GPRMC,140502.53,A,4329.5619,N,01256.1853,E,000.1,000.0,271209,002.3,E,A*36
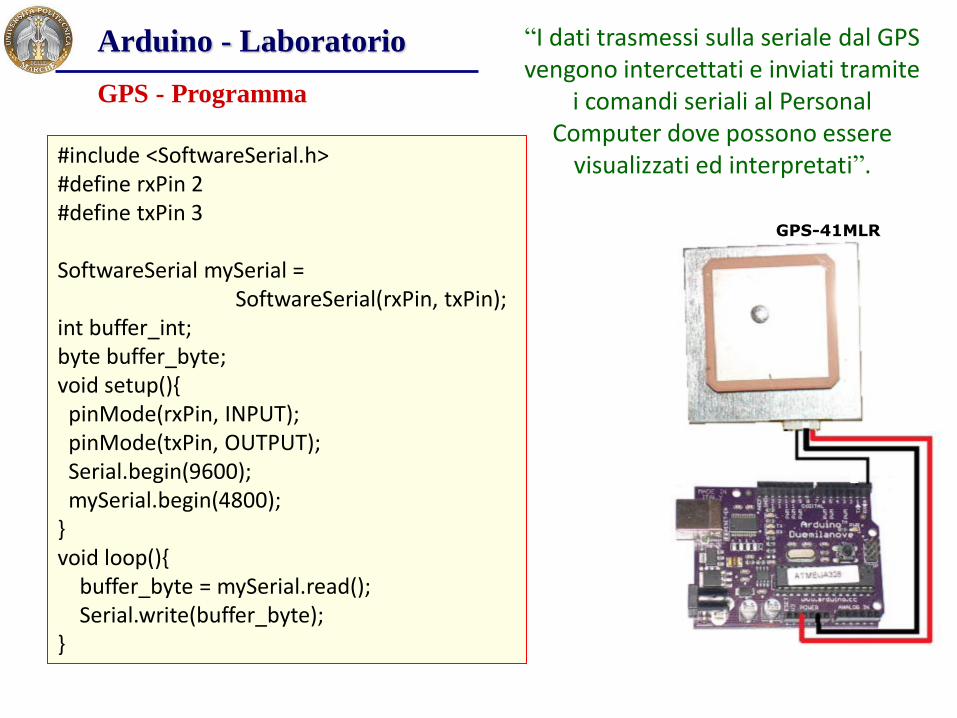
“I dati trasmessi sulla seriale dal GPS vengono intercettati e inviati tramite
i comandi seriali al Personal Computer dove possono essere
visualizzati ed interpretati”. #include <SoftwareSerial.h> #define rxPin 2 #define txPin 3 SoftwareSerial mySerial = SoftwareSerial(rxPin, txPin); int buffer_int; byte buffer_byte; void setup(){ pinMode(rxPin, INPUT); pinMode(txPin, OUTPUT); Serial.begin(9600); mySerial.begin(4800); } void loop(){ buffer_byte = mySerial.read(); Serial.write(buffer_byte); }
Arduino - Laboratorio
GPS - Programma
GPS-41MLR
Arduino - Laboratorio
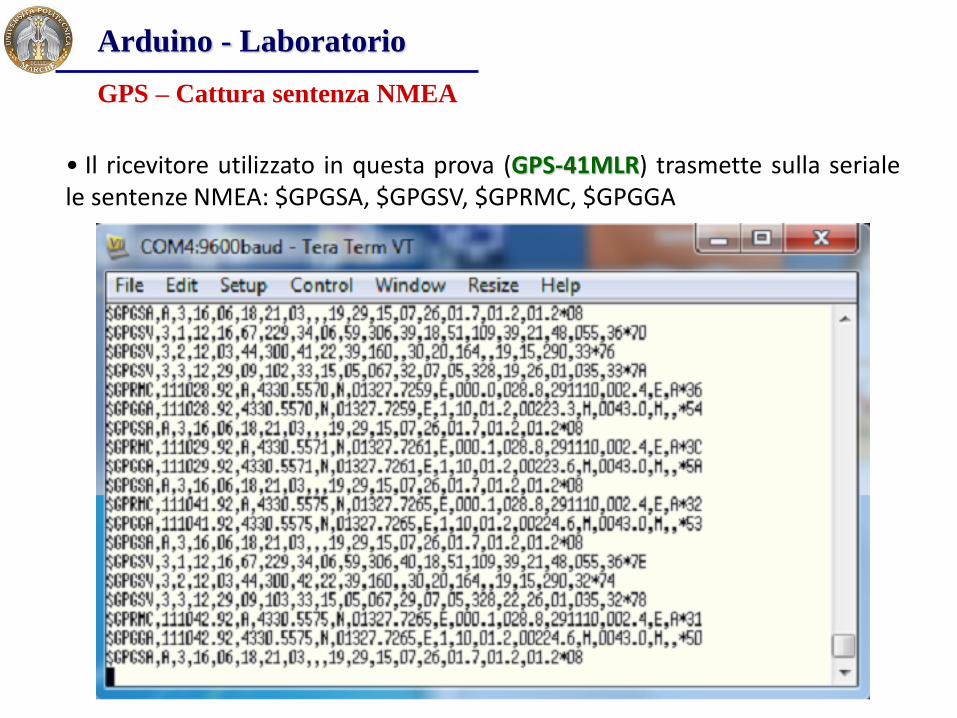
GPS – Cattura sentenza NMEA
• Il ricevitore utilizzato in questa prova (GPS-41MLR) trasmette sulla seriale le sentenze NMEA: $GPGSA, $GPGSV, $GPRMC, $GPGGA

ARDUINO + Ethernet shield

Arduino - Laboratorio
Ethernet shield
• La Ethernet shield è una scheda elettronica che si collega alla Arduino Duemilanove board con la quale è possibile il collegamento ad una rete locale LAN.
• La Ethernet shield è basata sull’integrato Wiznet W5100 che è un 10/100 ethernet controller, progettato per applicazioni embedded, che fornisce lo stack TCP/IP dal livello fisico fino al livello di trasporto.
Arduino - Laboratorio
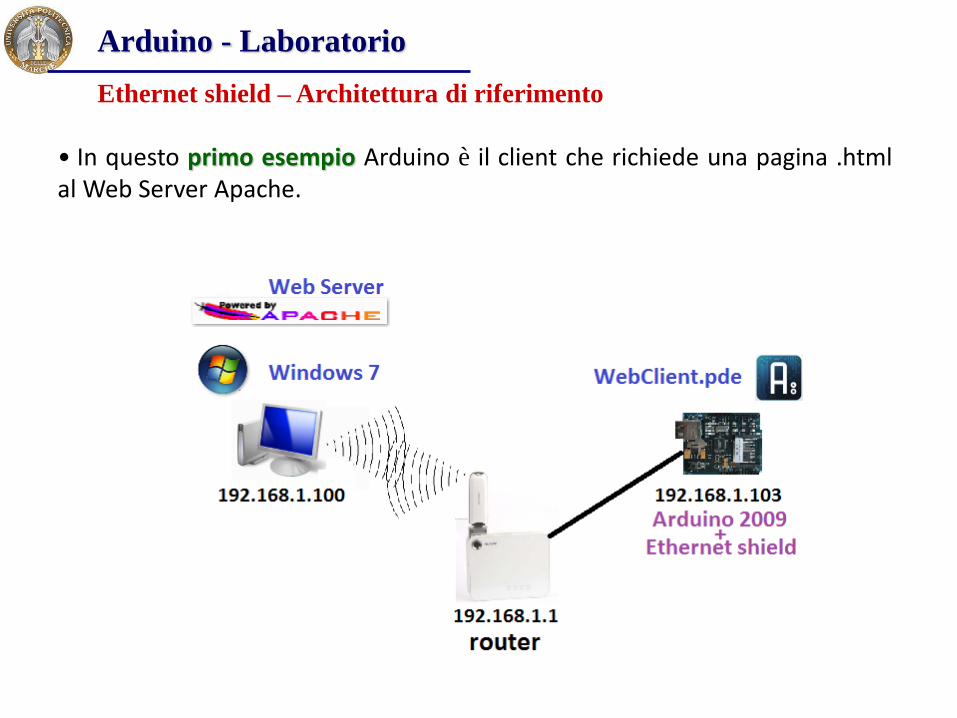
Ethernet shield – Architettura di riferimento
• In questo primo esempio Arduino è il client che richiede una pagina .html al Web Server Apache.
Arduino - Laboratorio
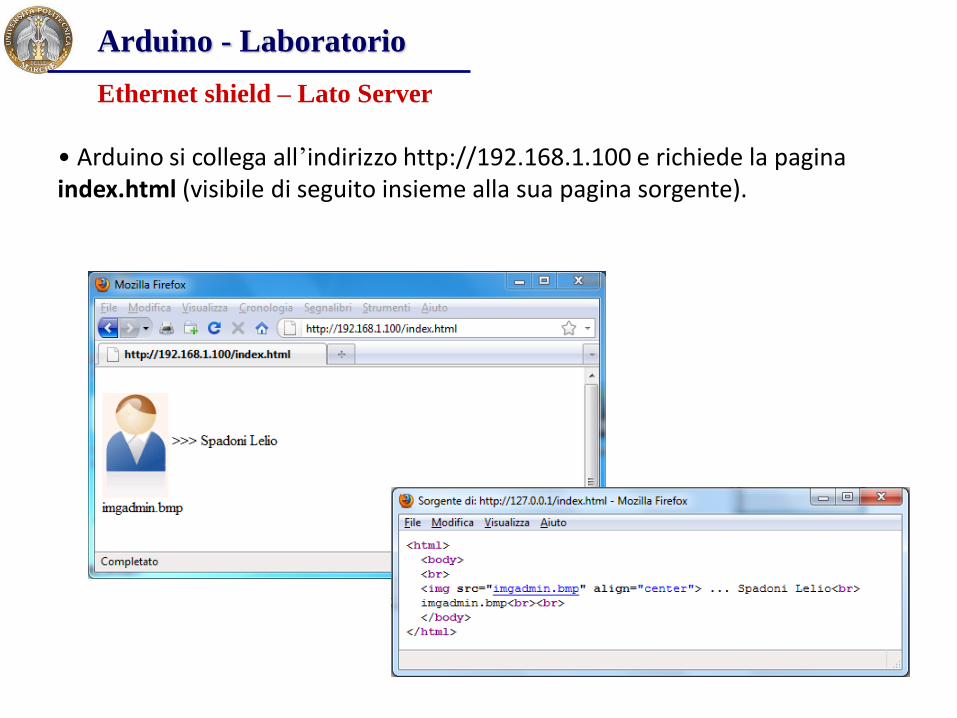
Ethernet shield – Lato Server
• Arduino si collega all’indirizzo http://192.168.1.100 e richiede la pagina index.html (visibile di seguito insieme alla sua pagina sorgente).

Arduino - Laboratorio
Ethernet shield – Lato client
#include <Ethernet.h> byte mac[] = { 0xDE, 0xAD, 0xBE, 0xEF, 0xFE, 0xED }; byte ip[] = { 192, 168, 1, 103 }; byte server[] = { 192, 168, 1, 100 }; Client client(server, 80); void setup() { Ethernet.begin(mac, ip); Serial.begin(9600); delay(1000); Serial.println("connecting..."); if (client.connect()) { Serial.println("connected"); client.println("GET /index.html HTTP/1.0"); client.println(); } else {Serial.println("connection failed");}} void loop() { if (client.available()) { char c = client.read(); Serial.print(c); } if (!client.connected()) { Serial.println(); Serial.println("disconnecting."); client.stop(); for(;;);}}
• Nel programma a fianco, dopo aver impostato l’IP del server (al quale è inviata la richiesta) e del client (che genera la richiesta), viene inviata una richiesta GET e viene inoltrata la risposta attraverso la porta seriale.
Arduino - Laboratorio
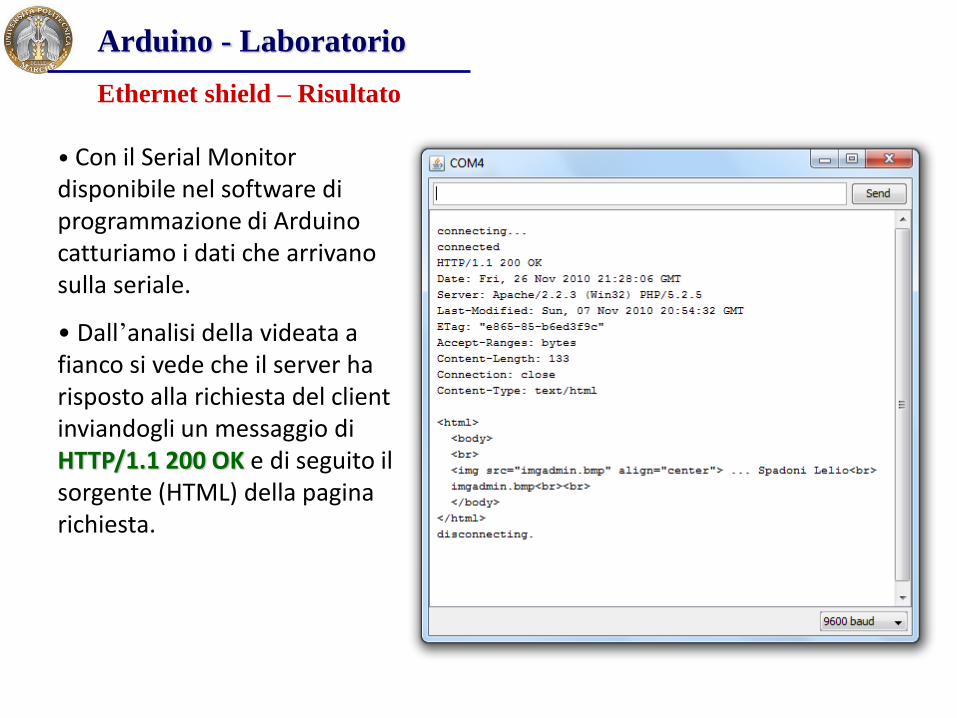
Ethernet shield – Risultato
• Con il Serial Monitor disponibile nel software di programmazione di Arduino catturiamo i dati che arrivano sulla seriale.
• Dall’analisi della videata a fianco si vede che il server ha risposto alla richiesta del client inviandogli un messaggio di HTTP/1.1 200 OK e di seguito il sorgente (HTML) della pagina richiesta.
Arduino - Laboratorio
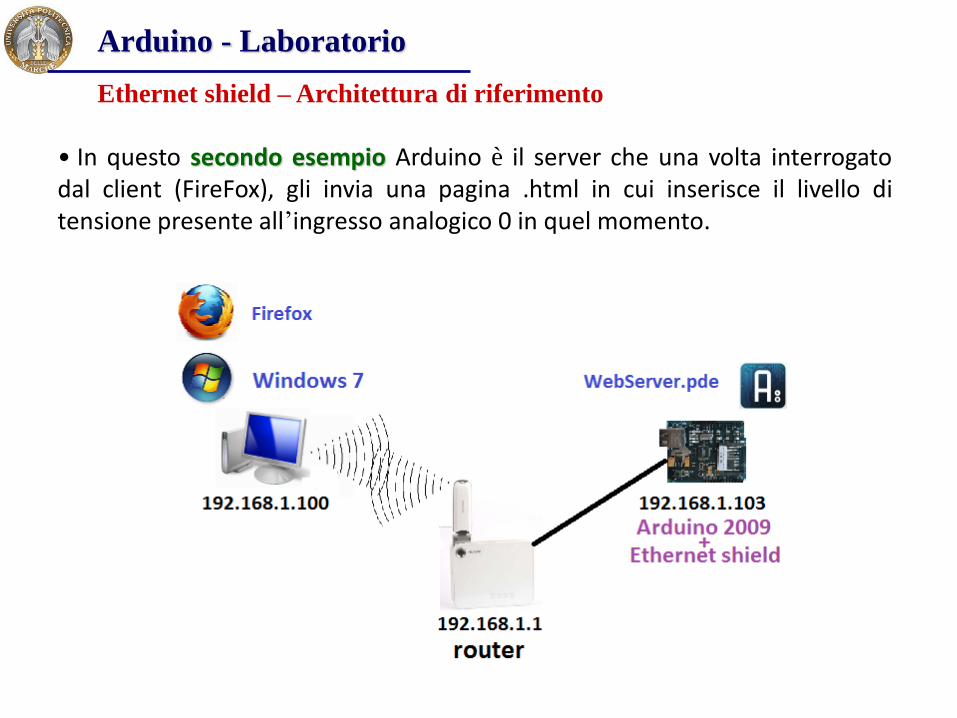
Ethernet shield – Architettura di riferimento
• In questo secondo esempio Arduino è il server che una volta interrogato dal client (FireFox), gli invia una pagina .html in cui inserisce il livello di tensione presente all’ingresso analogico 0 in quel momento.

Arduino - Laboratorio
Ethernet shield – Lato Server
• Dopo aver impostato l’IP e la porta di ascolto (http) del server (Arduino), questo si mette in attesa di una richiesta proveniente da un client (Firefox); al suo arrivo il server inserisce in una pagina in formato .html il livello di tensione presente all’ingresso analogico “0”, e la invia come risposta alla richiesta del client.
void loop() {Client client = server.available(); if (client) { while (client.connected()) { if (client.available()) { char c = client.read(); Serial.print(c); if ((c == '\n')) { client.println("HTTP/1.1 200 Ok"); client.println("Content-Type: text/html"); client.println(); client.println("<html>"); client.println("<title>"); client.println("Arduino Web Server"); client.println("</title>"); client.println("<body>"); client.println("<hr>"); client.println("<h2 align=\"center\">Arduino Web Server</h2>"); client.println("<hr>"); client.println("<br>"); client.println("<h2 align=\"center\">Il livello di tensione presente all'ingresso analogico 0 è</h2>"); client.print("<h1 align=\"center\">"); client.print(analogRead(0)*0.0048828125); client.println("</h1>"); client.println("</body>"); client.println("</html>"); break; }}}} delay(1); client.stop();}
#include <Ethernet.h> byte mac[] = { 0xDE, 0xAD, 0xBE, 0xEF, 0xFE, 0xED}; byte ip[] = { 192, 168, 1, 103 }; Server server(80);
void setup() {Ethernet.begin(mac, ip); server.begin(); Serial.begin(9600);}

Arduino - Laboratorio
Ethernet shield – Lato client
• La pagina di richiesta da parte del client.
• La pagina di risposta da parte del server.
ARDUINO + XBee

Arduino - Laboratorio
XBee shield
• Il modulo XBee è una soluzione compatibile con lo standard ZigBee/IEEE 802.15.4 che soddisfa la necessità di una rete a basso costo e a basso consumo, pensata soprattutto per l'utilizzo con sensori.
• Per configurare lo XBee il suo produttore, la Digi International, mette a disposizione il software X-CTU, reperibile all’indirizzo:
http://www.digi.com
Arduino - Laboratorio
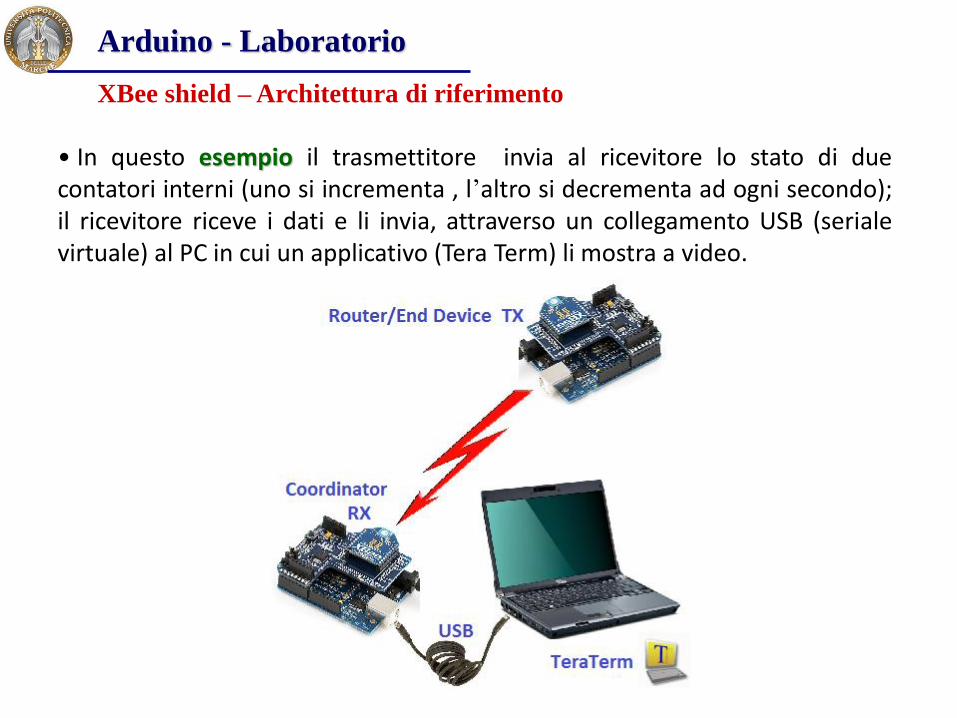
XBee shield – Architettura di riferimento
• In questo esempio il trasmettitore invia al ricevitore lo stato di due contatori interni (uno si incrementa , l’altro si decrementa ad ogni secondo); il ricevitore riceve i dati e li invia, attraverso un collegamento USB (seriale virtuale) al PC in cui un applicativo (Tera Term) li mostra a video.
Arduino - Laboratorio
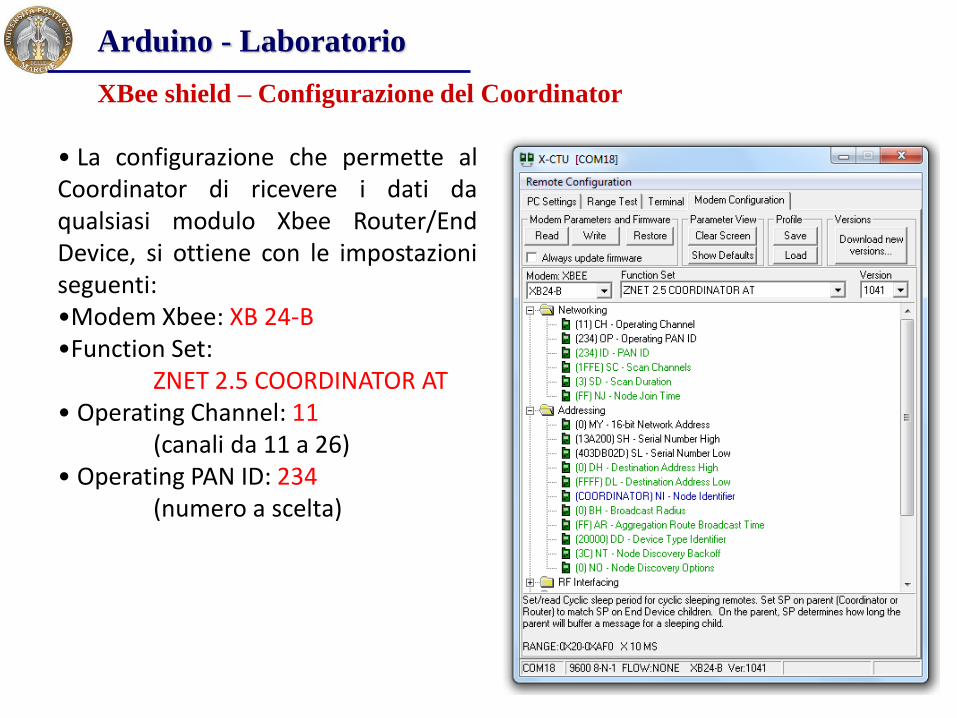
XBee shield – Configurazione del Coordinator
• La configurazione che permette al Coordinator di ricevere i dati da qualsiasi modulo Xbee Router/End Device, si ottiene con le impostazioni seguenti: •Modem Xbee: XB 24-B •Function Set: ZNET 2.5 COORDINATOR AT • Operating Channel: 11 (canali da 11 a 26) • Operating PAN ID: 234 (numero a scelta)

Arduino - Laboratorio
XBee shield – Configurazione del Router/End Device
• La configurazione che permette al Router/End Device di trasmettere i dati verso il Coordinator, si ottiene con le impostazioni seguenti: •Modem Xbee: XB 24-B •Function Set: ZNET 2.5 ROUTER/END DEVICE AT • Operating Channel: 11 (canali da 11 a 26) • Operating PAN ID: 234 (numero a scelta)

Arduino - Laboratorio
XBee shield – Lato Router/End Device
int count = 0; void setup() { Serial.begin(9600); } void loop() { // counter A will go forwards Serial.print('A'); Serial.print(count); Serial.println(); delay(1000); // counter B will go backwards Serial.print('B'); Serial.print(1024 - count); Serial.println(); delay(1000); // increase and reset the counter count++; if (count == 1024) count = 0; }
• Lo sketch a lato deve essere caricato sulla scheda Arduino 2009 dove è alloggiato il Router/End Device (TX).
• Nel programma vengono creati due contatori: il primo A è inizializzato a 0 e successivamente incrementato di 1; il secondo B è inizializzato a 1024 e successivamente decrementato di 1.
• Quando il contatore arriva a 1024 viene impostato nuovamente a zero e il ciclo riparte.

Arduino - Laboratorio
XBee shield – Lato Personal Computer
• Nella pagina iniziale di Tera Term selezionare la porta seriale sulla quale è collegato il Coordinator e assicurarsi di impostare i parametri di comunicazione nel seguente modo:
• Baud rate: 9600 • Data: 8 bit • Parity: none • Stop: 1 bit • Flow control: none
• Il risultato è che vedremo a video il contatore A che si incrementa, mentre il contatore B si decrementa.
ARDUINO + GSM

• Il modem della Telit GM862 è utilizzato nell’esempio seguente per inviare un SMS, attraverso la rete GSM, ad un telefono cellulare.
• Una volta inserita la SIM di un qualsiasi gestore di telefonia mobile il dispositivo ricerca la rete e, nel caso sia presente, si collega ad essa.
• Per comandare il modem si utilizzano i comandi AT.
GSM - Telit GM862
Arduino - Laboratorio

GSM - Comandi AT
• La maggior parte degli attuali modem utilizza i comandi AT Hayes, uno specifico insieme di comandi originalmente sviluppato per il modem Hayes Smartmodem da 300 baud.
• Ogni funzione del modem è governata dal relativo comando AT (che sta per ATtention, attenzione).
• Per inviare un comando occorre trasmettere sulla porta seriale del modem una stringa ASCII formata da AT seguito da uno o più comandi e da un carattere di ritorno a capo (CR).
Arduino - Laboratorio

GSM - Schema elettrico
Arduino - Laboratorio

Programma per
l’invio di un SMS
“Dopo aver caricato lo sketch nell’ATmega328, viene inviato un SMS attraverso il modem ad esso collegato tramite una seriale software.”
Arduino - Laboratorio

• Invio di un SMS da un telefonino, utilizzando i comandi AT: a) collegare il proprio cellulare al PC (seguire le istruzioni del produttore); b) aprire un programma che simula un terminale (HyperTerminal, Tera Term, ecc…) e selezionare la COM dove è collegato il telefono; c) digitare i seguenti comandi: 1: AT
2: OK
3: AT+CMGF=1
4: OK
5: AT+CMGW=“328467xxxx“
6: > Un semplice messaggio :-)
7: +CMGW: 1
9: OK
10: AT+CMSS=1
11: +CMSS: 20
13: OK
La descrizione dei
comandi è nella
slide seguente
Utilizzo dei comandi AT
Arduino - Laboratorio

• Linea 1: "AT" viene spedito al modem GSM/GPRS per testare la connessione. Il
modem risponde con un codice di risposta (OK alla linea 2)
• Linea 3: Il comando AT+CMGF viene usato per istruire il modem ad operare in modalità testuale per gli SMS. Il codice di risposta OK alla linea seguente indica che linea di comando AT+CMGF=1 è stata eseguita con successo;
• Linee 5-6: Il comando AT+CMGW viene usato per memorizzare nel modem il messaggio, mentre +85291234567 è il numero telefonico del destinatario. Dopo aver digitato tale numero, premete il tasto Enter. Il modem a questo punto dovrebbe ritornare il prompt ">" e a questo punto potete incominciare a scrivere il vostro SMS (in questo caso "Un semplice messaggio"). Quando avete finito, premete Ctrl+Z;
• Linea 7: +CMGW: 1 ci dice che l'indice assegnato al messaggio è 1. Questo indica la locazione dell'SMS nella memoria del modem;
• Linea 9: Il risultato OK indica che l'esecuzione del comando +CMGW ha avuto successo;
• Linea 10: il comando +CMSS viene usato per spedire i messaggi dalla memoria del modem. 1 indica l'indice dell'SMS ottenuto alla linea 7;
• Linea 11: +CMSS: 20 ci dice che il numero di riferimento assegnato all'SMS è 20;
• Linea 13: Il risultato OK indica che l'esecuzione del comando +CMSS ha avuto successo.
Utilizzo dei comandi AT
Arduino - Laboratorio

ARDUINO + BLUETOOTH

• BluetoothBee è un modulo Bluetooth Serial Port Profile (SPP) che permette di realizzare collegamenti seriali wireless.
• Il device è pienamente compatibile con la XBee shield già vista nelle slide precedenti; in pratica basta sostituire il modulo Xbee con il modulo BluetoothBee per avere a disposizione la tecnologia Bluetooth.
BluetoothBee
Arduino - Laboratorio
BluetootBee
CSR Bluecore-04 Externel Bluetooth singol chip
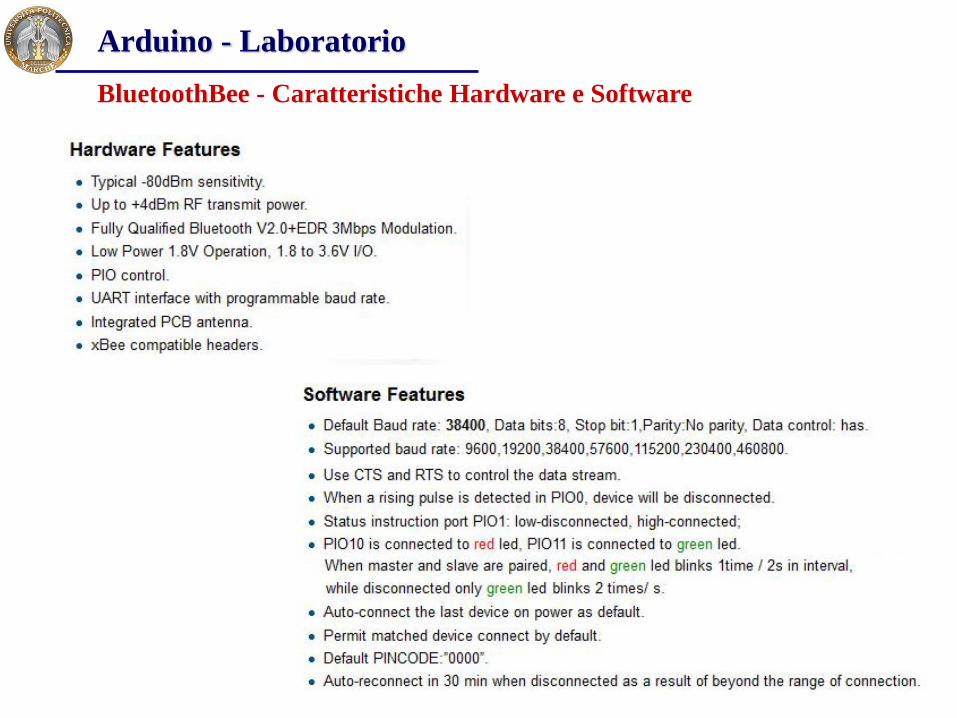
BluetoothBee - Caratteristiche Hardware e Software
Arduino - Laboratorio

BluetoothBee – Installazione del dispositivo
Arduino - Laboratorio
• In questa immagine si vede come si installa il modulo BluetoothBee sulla Xbee shield e anche come si posiziona quest’ultima sulla Arduino board.
BluetoothBee – Architettura di riferimento
Arduino - Laboratorio
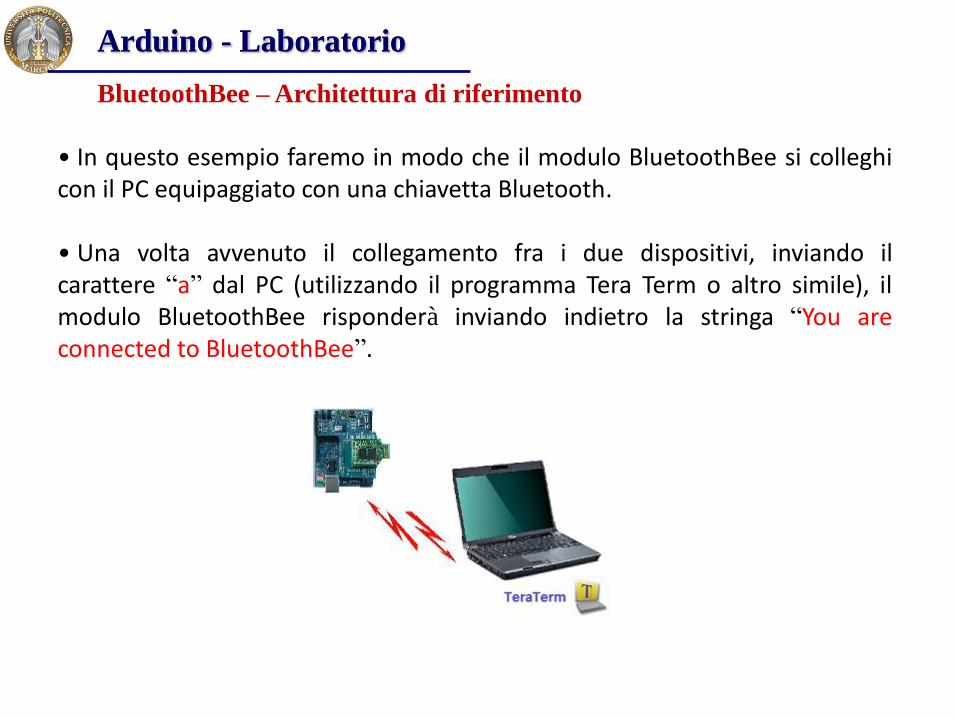
• In questo esempio faremo in modo che il modulo BluetoothBee si colleghi con il PC equipaggiato con una chiavetta Bluetooth.
• Una volta avvenuto il collegamento fra i due dispositivi, inviando il carattere “a” dal PC (utilizzando il programma Tera Term o altro simile), il modulo BluetoothBee risponderà inviando indietro la stringa “You are connected to BluetoothBee”.
Arduino - Laboratorio

BluetoothBee – Collegamento BluetoothBee-PC
Arduino - Laboratorio
Animazione
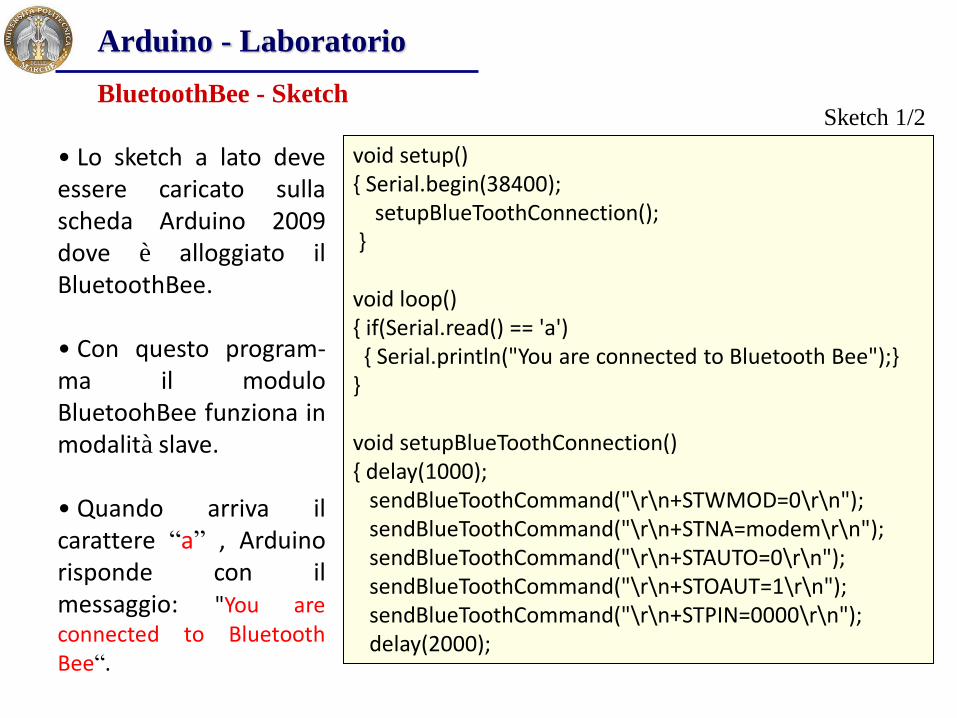
BluetoothBee - Sketch
Arduino - Laboratorio
void setup() { Serial.begin(38400); setupBlueToothConnection(); } void loop() { if(Serial.read() == 'a') { Serial.println("You are connected to Bluetooth Bee");} } void setupBlueToothConnection() { delay(1000); sendBlueToothCommand("\r\n+STWMOD=0\r\n"); sendBlueToothCommand("\r\n+STNA=modem\r\n"); sendBlueToothCommand("\r\n+STAUTO=0\r\n"); sendBlueToothCommand("\r\n+STOAUT=1\r\n"); sendBlueToothCommand("\r\n+STPIN=0000\r\n"); delay(2000);
• Lo sketch a lato deve essere caricato sulla scheda Arduino 2009 dove è alloggiato il BluetoothBee.
• Con questo program-ma il modulo BluetoohBee funziona in modalità slave.
• Quando arriva il carattere “a” , Arduino risponde con il messaggio: "You are connected to Bluetooth Bee“.
Sketch 1/2

BluetoothBee - Sketch
Arduino - Laboratorio
Serial.print("\r\n+INQ=1\r\n"); delay(2000); } void sendBlueToothCommand(char command[]) { Serial.print(command); delay(3000); }
Sketch 2/2
• Lo sketch prosegue dalla slide precedente.
• Comandi utilizzati
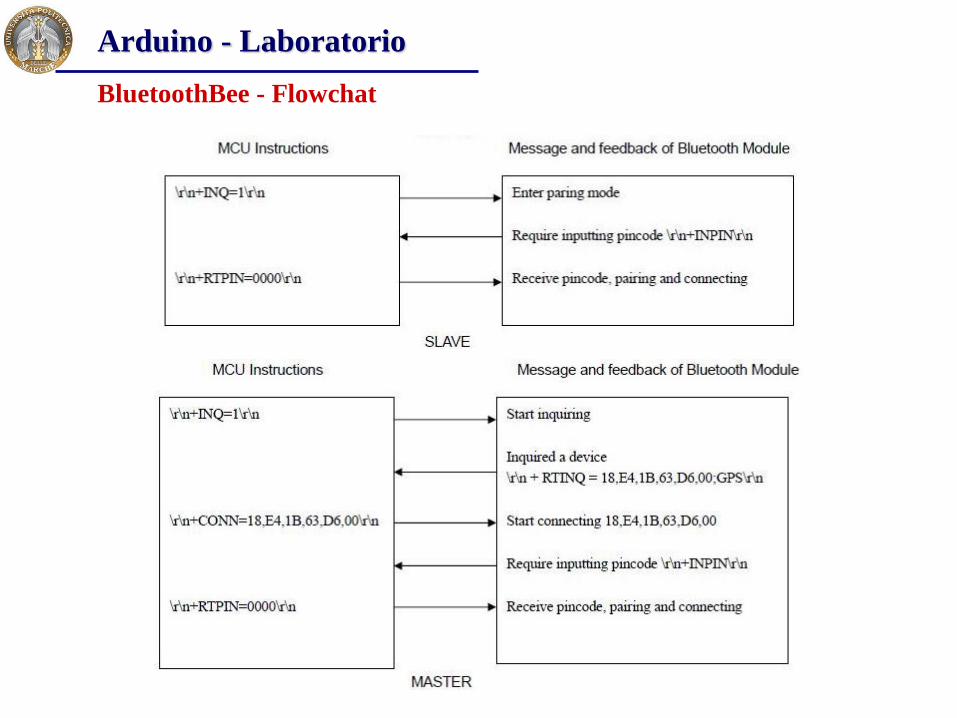
BluetoothBee - Flowchat
Arduino - Laboratorio
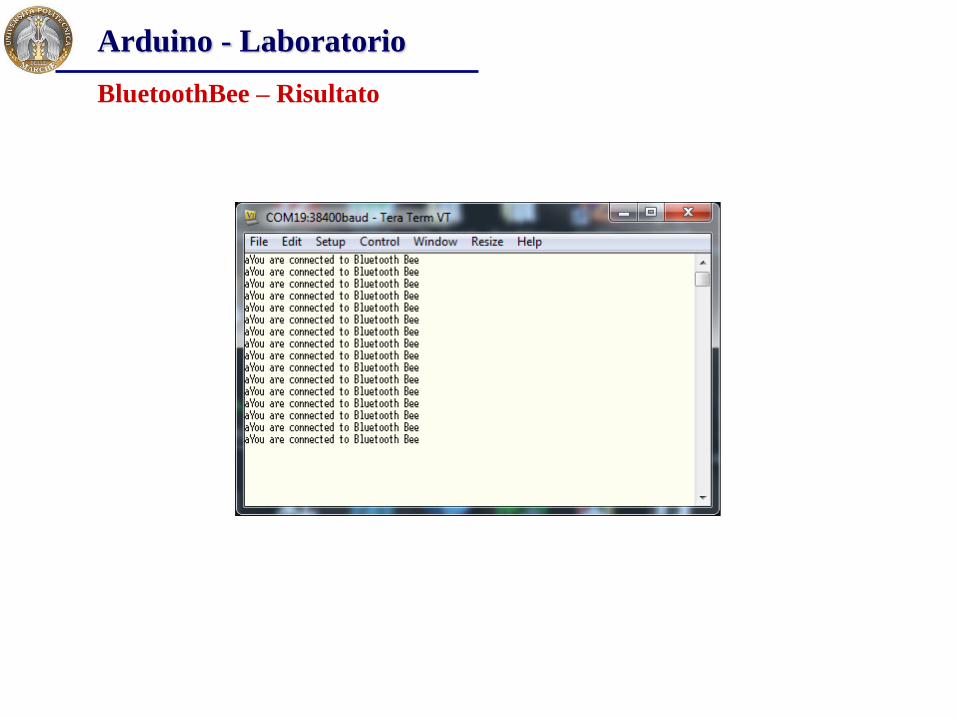
BluetoothBee – Risultato
Arduino - Laboratorio

Prossimi sviluppi

Arduino + Android
Arduino
Arduino + WiFi
Arduino

















