Istituto Nazionale di Oceanografia e di Geofisica Sperimentale VulnErabilità delle Coste e degli ecosistemi marini italiani ai cambiamenti climaTici e loro ruolO nei cicli del caRbonio mediterraneo Progetto VECTOR: Acquisizione sismica a riflessione multicanale terra e terra-mare nella Laguna di Grado e Marano Relazione OGS 2009/60 GDL 28 GEBA 17 aprile 2009
Transcript
Istituto Nazionale di Oceanografia e di Geofisica Sperimentale
VulnErabilità delle Coste e degli ecosistemi marini italiani
ai cambiamenti climaTici e loro ruolO nei cicli del caRbonio mediterraneo
Progetto VECTOR: Acquisizione sismica a riflessione multicanale
terra e terra-mare nella Laguna di Grado e Marano
Relazione OGS 2009/60 GDL 28 GEBA
17 aprile 2009
Responsabile del Progetto VECTOR
Prof. Cesare Corselli, Consorzio Interuniversitario per le Scienze del Mare (CoNISMA) - Roma e Dipartimento di Scienze Geologiche e Geotecnologiche, Università degli Studi di Milano Bicocca
Responsabile scientifico OGS:
Beniamino Bruno Manca fino al 31/12/2007 Cosimo Solidoro dal 1/1/2008
Responsabile attività della Linea 2 VULCOST- Vulnerabilità dei 5 sistemi costieri alle variazioni indotte dai cambiamenti climatici relativamente a variazioni relative del livello del mare, a frequenza ed intensità delle precipitazioni e degli eventi estremi (impatto sul trasporto fluviale e sulle falde acquifere).
Prof. Bruno D’Argenio Istituto per l'Ambiente Marino Costiero (IAMC) - CNR - Napoli
Responsabile scientifico OGS per la Laguna di Grado e Marano Martina Busetti
Responsabile scientifico OGS per la Laguna di Grado e Marano dell’Attività 2.2 -Cambiamenti negli eventi metereologici estremi relativamente ai processi geomorfologici delle zone costiere e dunque sulla geomorfologia costiera, struttura e funzione dei delta, habitat costieri.
Martina Busetti
Responsabile scientifico OGS per la Laguna di Grado e Marano Sub-attività 2.2.5 - Indagine sismo-stratigrafica mediante l'acquisizione di profili sismici terra-mare a sistema misto multicanale e monocanale ad alta risoluzione (3 profili per ognuna delle seguenti aree: Laguna di Grado e Marano, Fiume Ombrone, Fiumi Foglia e Metauro, Golfo di Salerno e di Policastro. Integrazione con profili sismici già esistenti. Taratura dei profili sismici con dati di pozzo per la caratterizzazione litostratigrafica e temporale, ove possibile.
Luca Baradello RELAZIONE A CURA DI:
Fabrizio Zgur Luca Baradello Martina Busetti Francesco Fanzutti Alfio Barbagallo
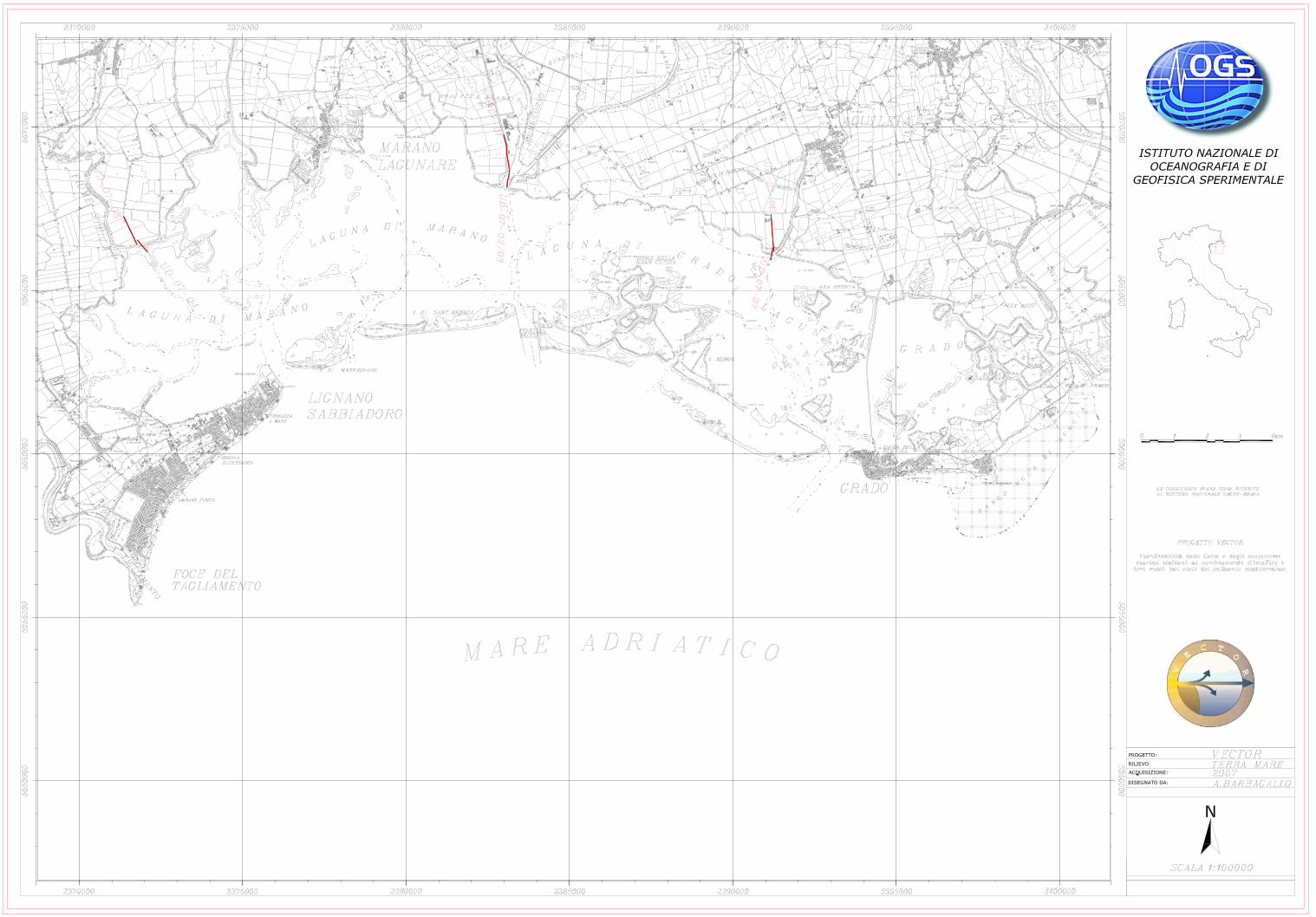
1.1 Premessa ..........................................................................................................3 1.2 Obiettivi .............................................................................................................3 1.3 Area di studio ...................................................................................................4 1.4 Personale ..........................................................................................................5 1.5 Cronologia ........................................................................................................6
2. ACQUISIZIONE DATI ................................................................................... 7 2.1 Metodologia ......................................................................................................7
2.1.1 Sismica a terra .............................................................................................8 2.1.2 Sismica terra-mare .......................................................................................9
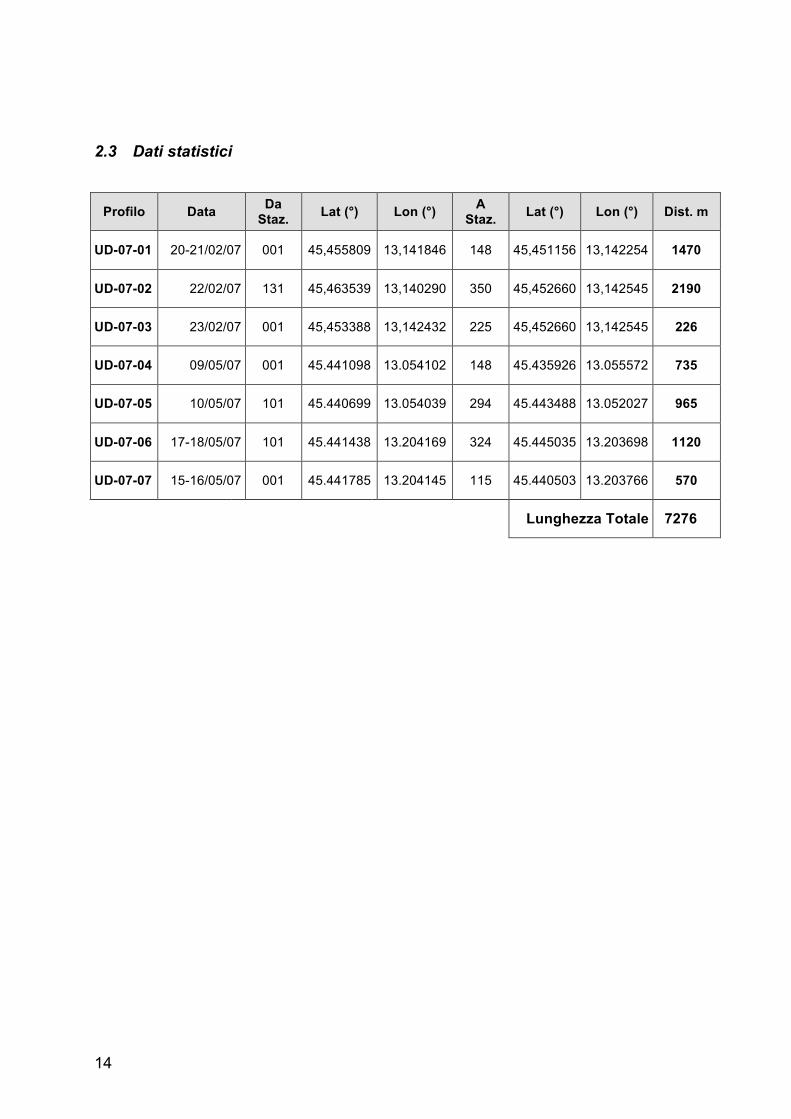
2.2 Parametri di acquisizione ..............................................................................13 2.3 Dati statistici ...................................................................................................14
Busetti Martina GEMAR/RIMA/OGS Responsabile scientifico Accaino Flavio REDAS/GDL/OGS Controllo di qualità
Affatato Alessandro GEBA/GDL/OGS Rilievo topografico, operatore di linea
Barbagallo Alfio GEBA/GDL/OGS Rilievo topografico, operatore di linea
Bratus Antonio GEBA/GDL/OGS Operatore di linea Caburlotto Andrea GEMAR/RIMA/OGS Operatore di linea Cappelli Giovanni ASTI/GDL/OGS Energizzazione Vibroseis Caressa Stefano Proprietario Castorino2 Pilota Castorino2
Del Negro Elvio GEBA/GDL/OGS Controllo di qualità, energizzazione
Fanzutti Francesco GEBA/GDL/OGS Operatore di linea
Giustiniani Michela GEBA/GDL/OGS Operatore di linea, controllo di qualità
Lascano MariaEugenia GEBA/GDL/OGS Stagista Limonta Stefano SOLGEO s.r.l. (Bergamo) Energizzazione a mare Marchioni Giorgio Proprietario imbarcazione Pilota imbarcazione Romeo Roberto GEA/RIMA/GDL Riprese video e foto
Baradello Luca GEBA/GDL/OGS Elaborazione dati sismici Barbagallo Alfio GEBA/GDL/OGS Elaborazione dati topografici
6
1.5 Cronologia
Le indagini sono state eseguite in tre fasi distinte della durata di cinque giornate
lavorative ciascuna, per un totale complessivo di quindici giornate. Si riportano di seguito i
dettagli delle operazioni condotte sito per sito.
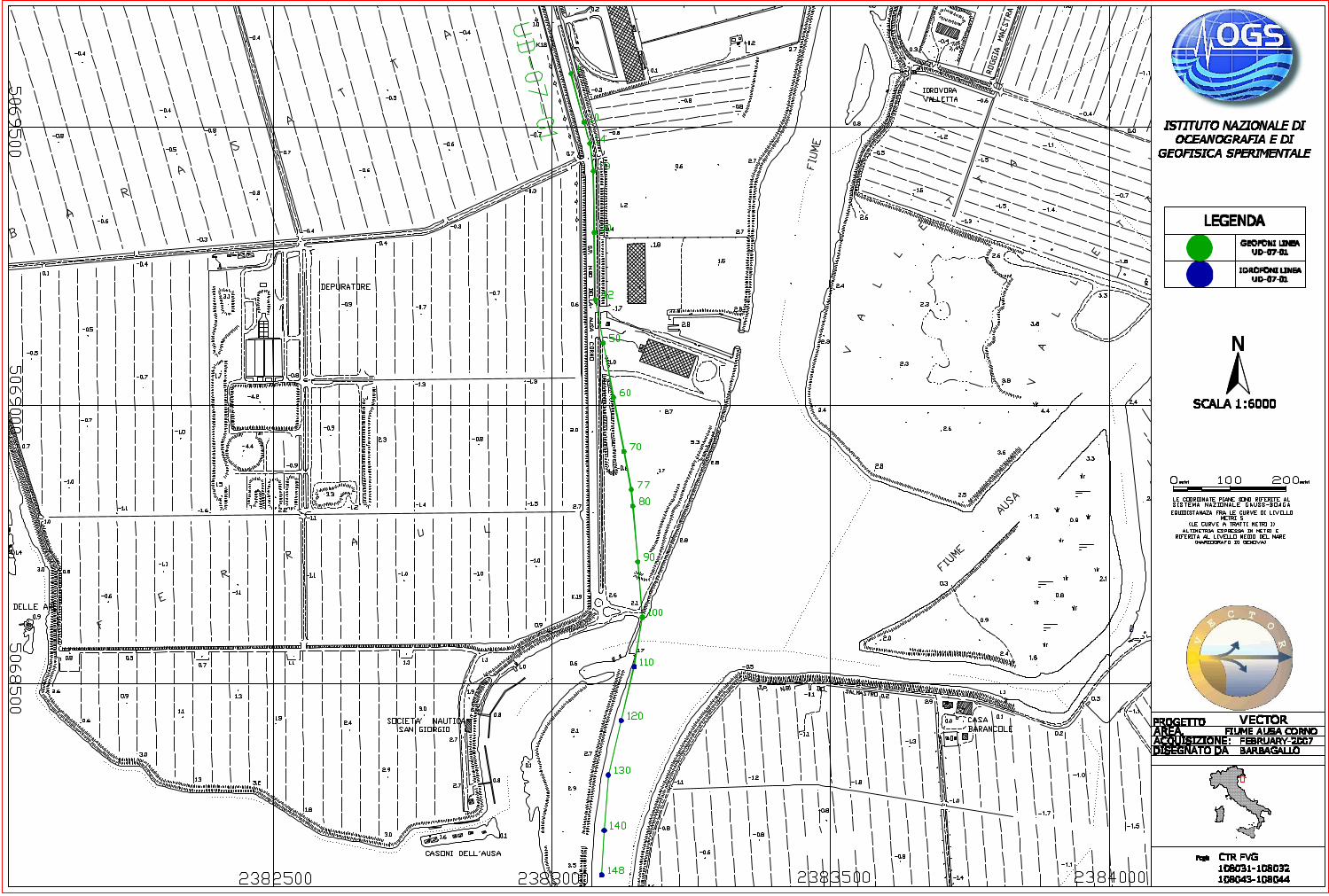
1.5.1. Sito di Porto Nogaro, Ausa-Corno 19/02 Mobilitazione mezzi e materiali con partenza dalla sede OGS. Stendimento della
linea a terra per 2 km con intertraccia 10 m.
20/02 Stendimento bay cable; test di acquisizione, inizio registrazione linea terra-mare
UD-07-01; energizzazione a mare con cannone, a terra con il Vibro.
21/02 Continuazione e termine della linea UD-07-01; scoppi a mare con cannone e a
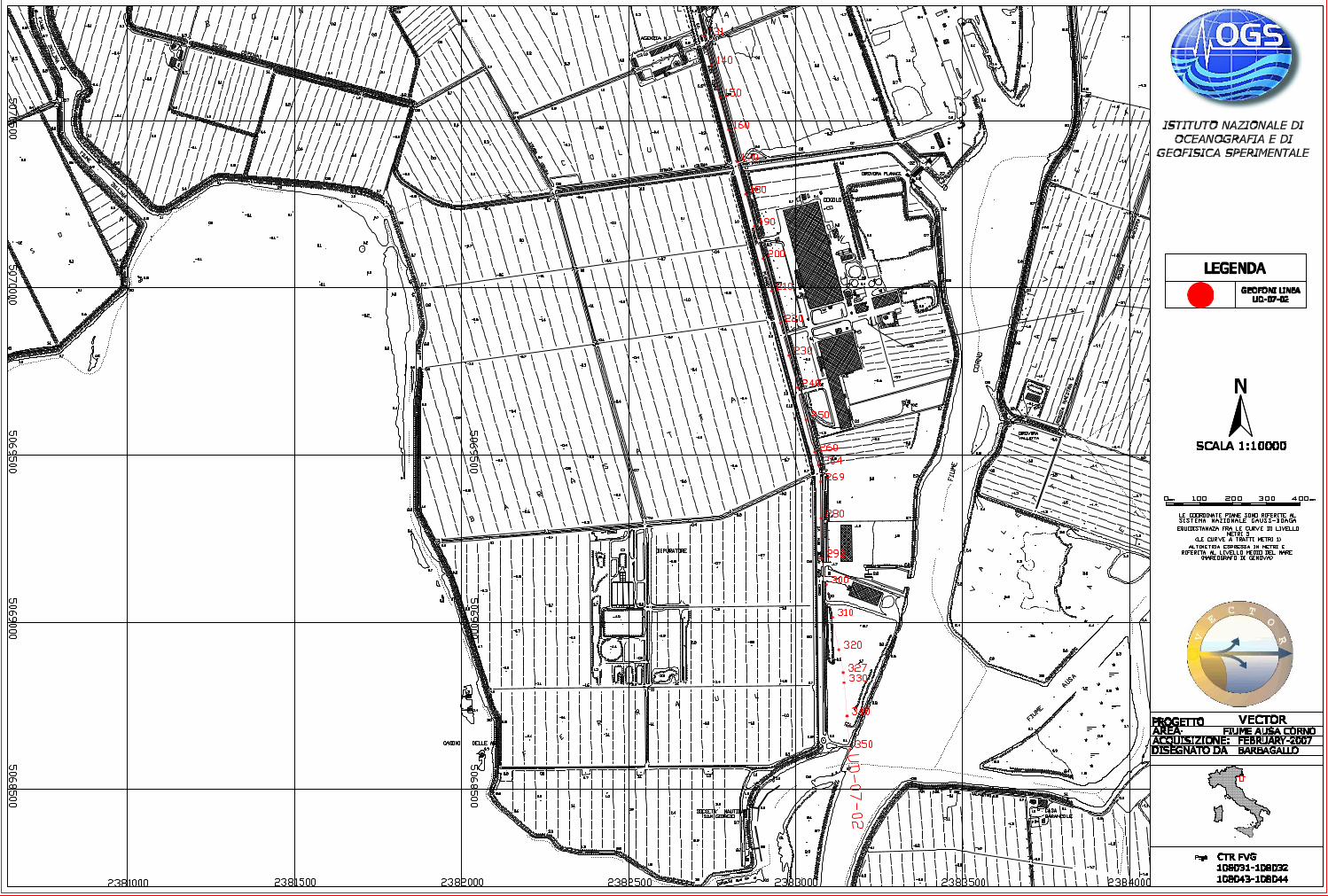
terra con il Vibro. Stendimento linea UD-07-02, a terra.
22/02 Acquisizione linea UD-07-02 a terra, lunga circa 2 km con intertraccia di 10 m
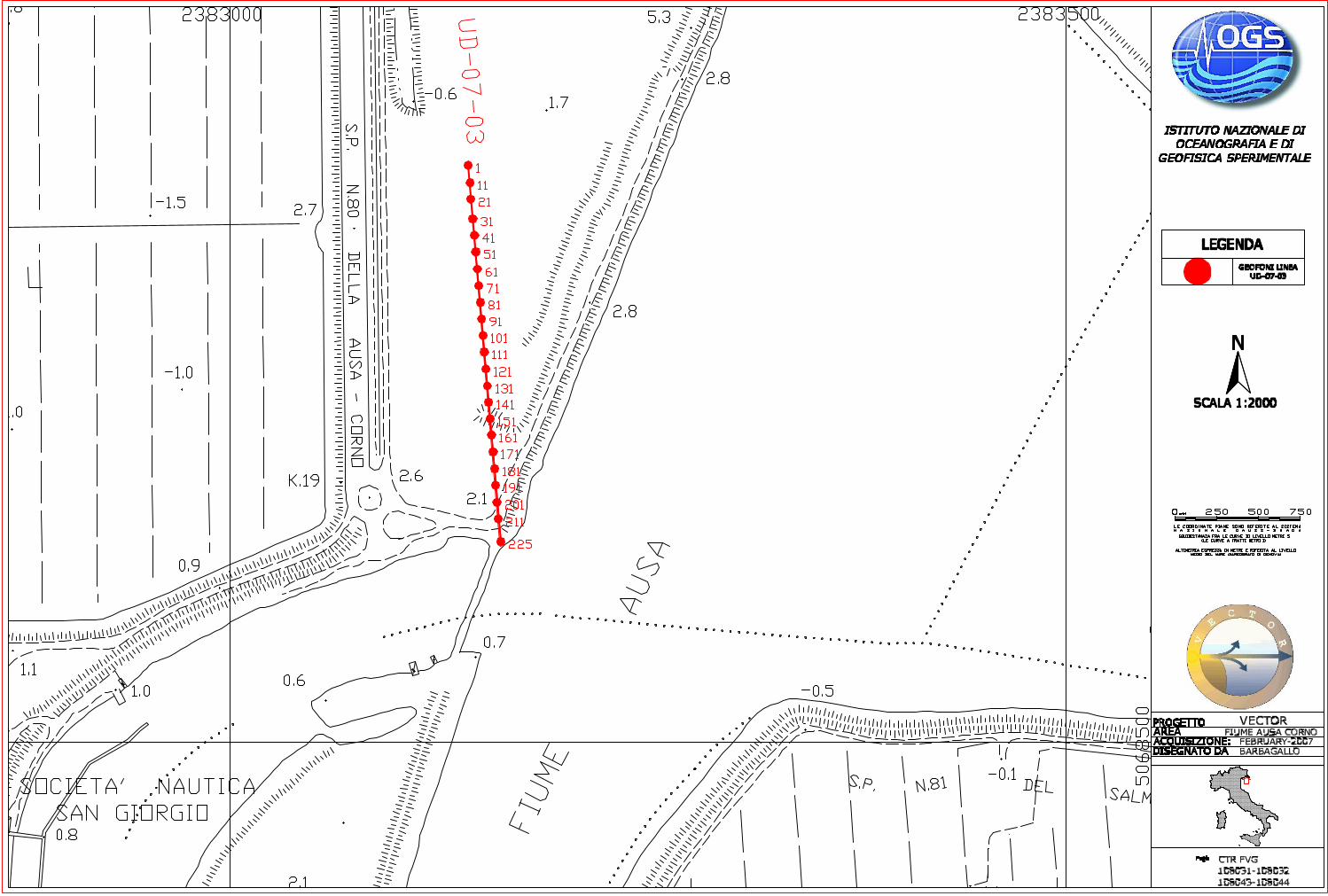
23/02 Stendimento e acquisizione linea sismica terra UD-07-03, lunga 250 m con
intertraccia 2 metri e intervallo di scoppio di 4 m. Recupero materiale e rientro in
sede.
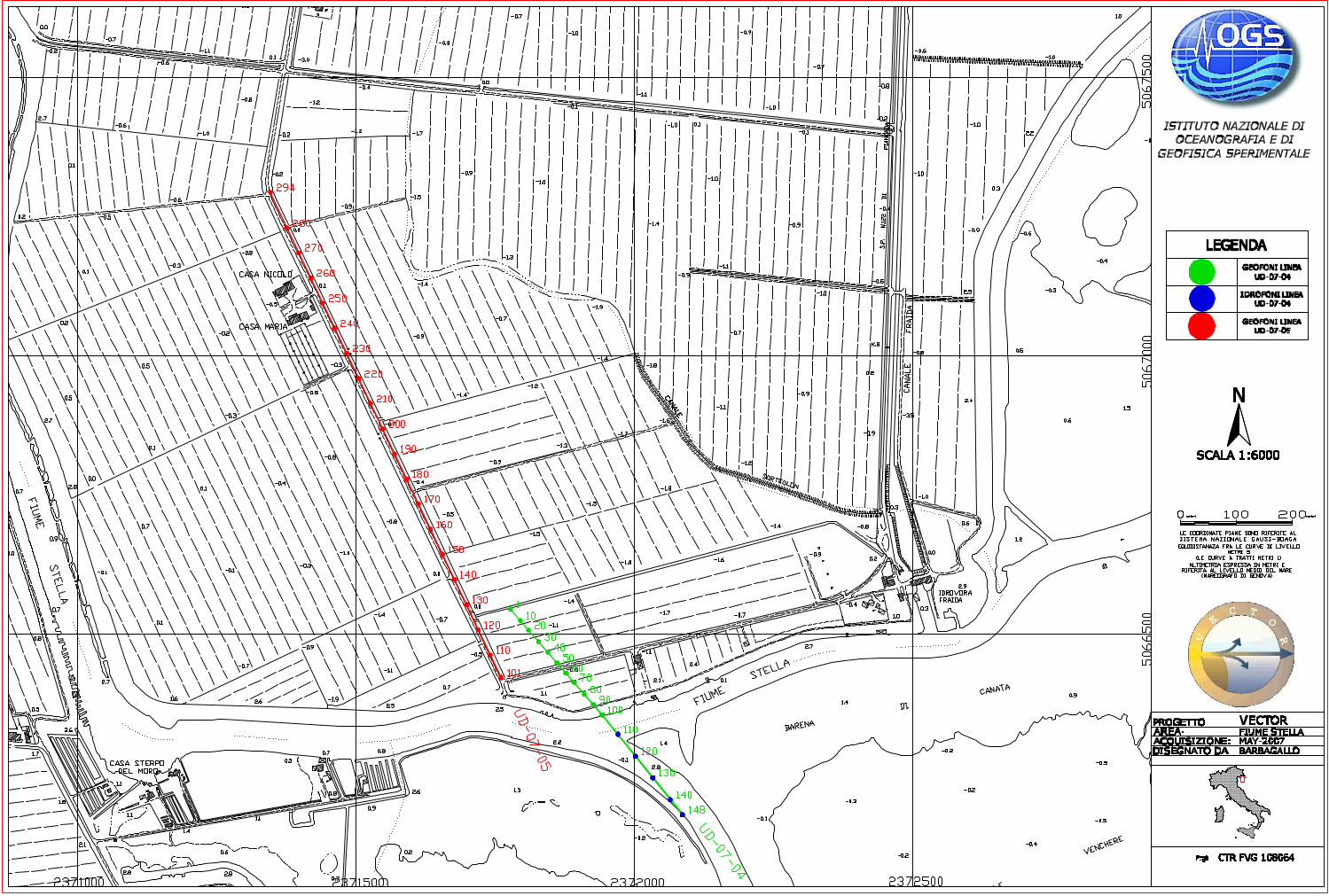
1.5.2. Sito di Palazzolo dello Stella 7/05 Mobilitazione mezzi e materiali con partenza dalla sede OGS.
8/05 Stendimento linea terra e test energizzazione con Minivib.
9/05 Stendimento bay cable a mare e acquisizione UD-07-04 terra-mare energizzando
con Fucile Isotta a terra e cannone in mare.
10/05 Acquisizione profilo a terra UD-07-05.
11/05 Termine delle operazioni e rientro in sede.
1.5.3. Sito di Aquileia, Natissa 14/05 Mobilitazione mezzi e materiali, rilievo topografico linea terra mare.
15/05 Stendimento a terra, posa del bay cable e inizio acquisizione profilo terra mare
UD-07-07 con energizzazione vibroseis in terra e cannone ad aria compressa in
mare.
16/05 Continuazione acquisizione profilo terra-mare e stendimento a terra con rilievo
topografico.
17/05 Stendimento e inizio acquisizione profilo UD-07-06 terra.
18/05 Termine acquisizione profilo UD-07-06, recupero materiale e rientro.
7
2. ACQUISIZIONE DATI
2.1 Metodologia
Le operazioni sono state condotte adottando per ciascun sito due diverse tipologie di
indagine: rilievi sismici a riflessione ad alta e altissima risoluzione in terra, e rilievi sismici a
riflessione ad alta risoluzione terra-mare, tipica di ambienti costieri e di transizione.
La scelta del tipo di sorgente sismica e la definizione dei principali parametri di
acquisizione sono state dettate:
1) dall’esigenza di conseguire la più elevata risoluzione possibile, sia temporale
(con l’impiego di sorgenti in grado di generare alte frequenze) che laterale
(adottando spaziature tra i gruppi di ricevitori estremamente ridotte, dai 5 m fino
a 2.5 m)
2) di confinare i target principali del rilievo all’interno della optimum window (Hunter
et al., 1984)1 onde garantire la massima copertura (con punti scoppio molto fitti)
sui riflettori di maggior interesse, in particolare relativi agli eventi di massima
ingressione marina nel Pleistocene Superiore alla profondità presunta compresa
fra qualche decina e qualche centinaia di metri.
Durante i test di campagna antecedenti la fase di acquisizione vera e propria, alcuni dei
parametri - specialmente quelli di sorgente - sono stati calibrati e ridefiniti anche sulla base
del responso del terreno. Per citarne un paio, il tipo di rampa da applicare allo sweep
generato dal vibratore, oppure il numero di ripetute (battute singole da sommare insieme)
per ciascun shot point nel caso di impiego della massa battente.
Nella tabella 2.1. sono riepilogati i parametri di acquisizione adottati, nella tabella 2.2.
sono riportati i dati statistici.
Per una descrizione dettagliata della strumentazione utilizzata, cui si dedica un breve
cenno nei seguenti paragrafi, si veda anche l’Appendice A: Strumentazione.
1 Hunter, J. A., Pullan, S. E., Burns, R. A., Gagne, R. M., and Good, R. S., 1984. Shallow seismic reflection mapping of the overburden–bedrock interface with the engineering seismograph - Some simple techniques. Geophysics, 49, 1381-1385.
8
2.1.1 Sismica a terra
Si è trattato di prospezioni sismiche terrestri di tipo convenzionale, che hanno
comportato l’impiego di sorgenti e ricevitori tipici per questo tipo di indagini, e cioè vibratore,
masse battenti e fucile sismico quali sorgenti, e sistema telemetrico digitale quale
acquisitore.
E’ stata impiegata una squadra di terra con un osservatore, un addetto
all’energizzazione, e il personale di linea (line checking) per la manutenzione e le eventuali
sostituzioni – se e quando richieste dall’osservatore – delle unità remote mal funzionanti o a
corto di batteria.
Fig. 2.1. Profilo a terra: disposizione delle unità remote lungo la linea. Ciascuna unità gestisce due canali, ricevendo i segnali provenienti da altrettanti geofoni (qui parzialmente nascosti dai picchetti che segnalano le stazioni).
9
Fig. 2.2. Acquisizione e registrazione dei dati. La visualizzazione dei dati consente una prima valutazione della qualità.
2.1.2 Sismica terra-mare
La realizzazione di un’indagine in zona di transizione ha reso indispensabile la messa
a punto di un sistema di acquisizione opportunamente configurato per la registrazione
simultanea terra-mare, utilizzando indifferentemente sorgenti terrestri o marine.
Fig. 2.3. Posa del bay cable (visibile un idrofono – in giallo).
10
La continuità terra-mare del profilo è stata ottenuta allestendo un sistema assemblato
(Fig.2.1) costituito da tre componenti principali:
1. Un sistema di acquisizione telemetrico DMT-Summit a 24 bit per la registrazione in
terra costituito da unità remote (RU), ciascuna delle quali gestisce due canali i cui
segnali, amplificati e digitalizzati, vengono trasmessi al registratore attraverso piattina
bipolare. La possibilità di connettere le RU in qualsiasi posizione lungo la linea, grazie
a connettori di tipo snap-on, rende questo sistema molto versatile in quanto permette
di realizzare profili con intervalli di traccia variabili entro un range molto ampio (da
poche decine di centimetri alle decine di metri).
2. Un bay cable analogico a 48 canali adagiato sul fondale per la registrazione in mare,
della lunghezza complessiva di 235 m.
3. Un’unità di interfaccia, realizzata da OGS, tramite la quale è stato possibile collegare
il sistema telemetrico al cavo marino. I 48 canali di quest’ultimo sono stati connessi a
24 RU del sistema terrestre raggruppate a riva. Le rimanenti RU sono state disposte
lungo lo stendimento a terra, rendendo così disponibile un sistema a più di 200 canali
complessivi. Fig. 2.4. Sistema misto terra mare. In primo piano le 24 unità remote del sistema telemetrico Summit. Ciascuna unità riceve in ingresso due canali dal bay cable (48 canali in tutto). E’ visibile l’unità di interfaccia e distribuzione che collega il bay cable al sistema telemtrico e, in secondo piano, il punto di approdo del cavo stesso.
Approdo Bay cable
Interfaccia terra-mare
11
Tale configurazione ha permesso di realizzare un’unica linea idro-geofonica in
grado di registrare simultaneamente dati terra/terra, terra/mare, mare/terra e mare/mare,
mantenendo costante la copertura.
Fig. 2.5. Un modello schematico del sistema di acquisizione terra mare realizzato dall’OGS.
Le operazioni di registrazione sono state interamente gestite dal sistema terrestre.
Sono state impiegate simultaneamente due squadre, la prima su imbarcazione per la
gestione delle operazioni in mare (energizzazione, posizionamento e recupero cavo), la
seconda per la registrazione e la posa della linea in terra.
Un modello di acquisizione schematico è riportato in Fig. 2.2.
Fig. 2.6.: Modello schematico di acquisizione. La realizzazione del profilo ha richiesto l’impiego simultaneo di due squadre per la gestione delle operazioni a mare e a terra.
Interfaccia terra-mare
Energizzazione mare
Bay cable analogico
Registratore
Energizzazione terra
SCHEMA DI ACQUISIZIONE
Sistema telemetrico
12
Fig. 2.7. Energizzazione con minivib.
Fig. 2.8. Gestione della registrazione: controllo della linea e verifica delle comunicazioni.
13
2.2 Parametri di acquisizione
Nella seguente tabella si riportano i parametri di acquisizione adottati in ciascun sito.
Sono indicate la tipologia del rilievo, la sorgente e il tipo di ricevitore utilizzati.
Sito Porto Nogaro, Ausa-Corno Palazzolo dello Stella Aquileia, Natissa Periodo 19-23 Febbraio 2007 07-11 Maggio 2007 14-18 Maggio 2007 Linea UD-07-01 UD-07-02 UD-07-03 UD-07-04 UD-07-05 UD-07-06 UD-07-07
Tipologia T-Mare Terra Terra T–Mare Terra Terra T-Mare Energizzazione
Sorgente terra Minivib Minivib Minivib Fucile PWD 80 Minivib Minivib
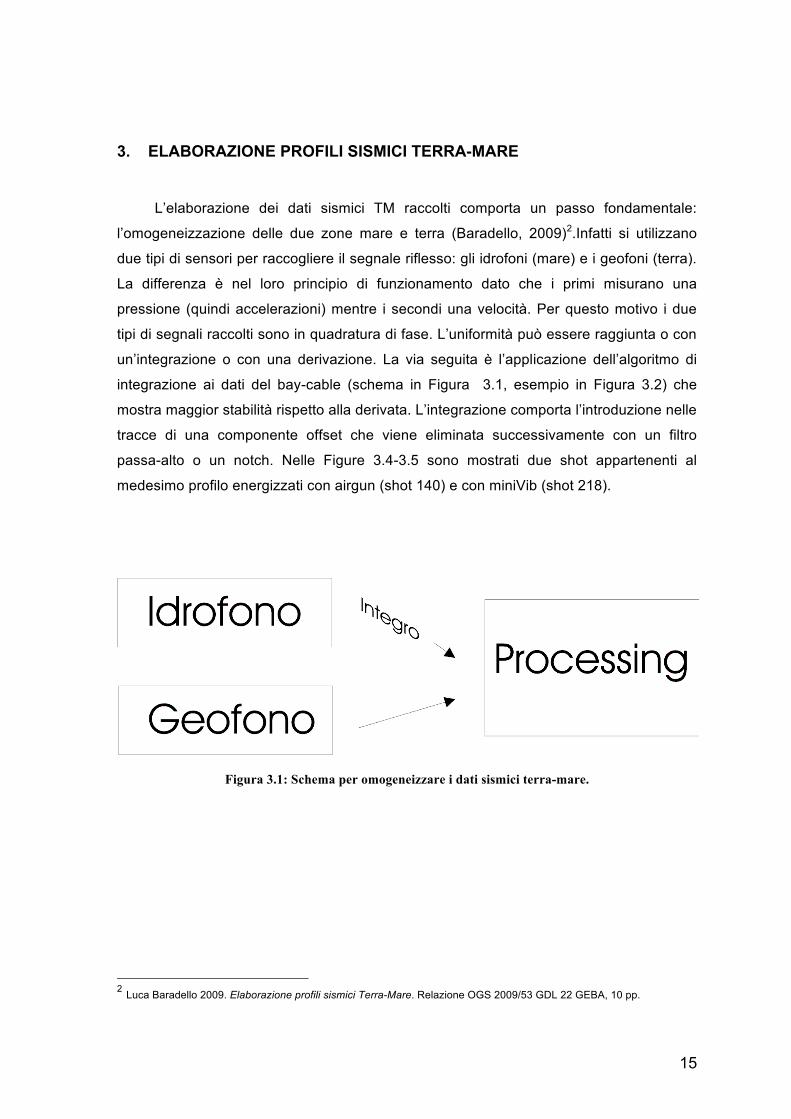
Figura 3.2 : In rosso i segnali raccolti dall’idrofono, in blu gli stessi dopo l’integrazione.
17
Figura 3.3: Dettaglio della Figura 3. Blu è integrato.
Poiché le sorgenti sono “disomogenee”, a mare è sempre di carattere impulsivo a
fase minima mentre a terra è di tipo vibrazionale a fase zero, i dati vibro devono essere
riportati a fase minima con un filtro di fase.
Dopo aver reso omogenei i dati TM si può procedere con le sequenze di
elaborazione standard. Le ampiezze possono essere rese omogenee tranquillamente
durante questa fase.
18
Figu
ra 3
.4: E
sem
pio
di s
hot a
mar
e co
n ai
rgun
. I
prim
i 48
cana
li so
no in
eren
ti al
bay
-cab
le. A
sin
istr
a i d
ati
raw
, al c
entr
o do
po l'
appl
icaz
ione
del
l'int
egra
zion
e ai
pri
mi 4
8 ca
nali,
a d
estr
a do
po u
n fil
tro
tagl
ia b
asso
.
19
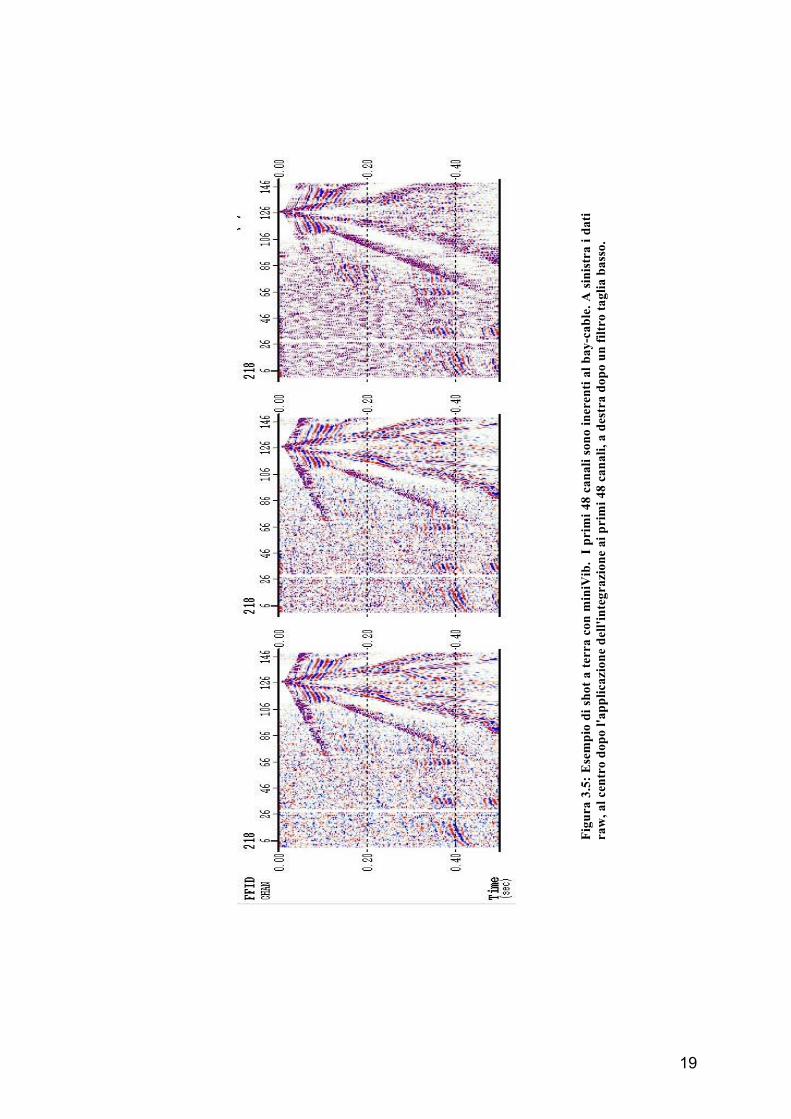
Figu
ra 3
.5: E
sem
pio
di s
hot a
terr
a co
n m
iniV
ib.
I pr
imi 4
8 ca
nali
sono
iner
enti
al b
ay-c
able
. A s
inis
tra
i dat
i ra
w, a
l cen
tro
dopo
l'ap
plic
azio
ne d
ell'i
nteg
razi
one
ai p
rim
i 48
cana
li, a
des
tra
dopo
un
filtr
o ta
glia
bas
so.
20
In Figura 3.6 è riportato un esempio di profili sismico terra-mare con energizzazione
airgun-vibroseis. I CDP a sinistra fino alla caduta di copertura appartengono all’ambiente
marino. Si può notare una risposta sismica a più alta frequenza nella zona mare e la
discreta continuità dei riflettori lungo tutto il profilo. La frequenza maggiore è causata
dall’anomalo funzionamento dell’airgun in acque basse (Baradello, 2009)3.
Figura 3.6: Sezione stack profilo sismico terra-mare.
3 Luca Baradello 2009. Test di acquisizioni sismiche multicanale in shallow water. Relazione OGS 2009/1–GDL1 GEBA, 16
pp.
21
APPENDICE A - STRUMENTAZIONE
A.1. Posizionamento
A.1.1. Posizionamento in mare
Le posizioni dell’energizzazioni durante le linee sismiche a mare sono state ottenute con un
GPS differenziale TRIMBLE AgGPS123. Il sistema traccia 12 canali paralleli ed è dotato di
antenna combinata GPS Compact Dome/beacon e satellite Spot Beam. Si è utilizzata la ricezione
delle correzioni differenziali da satellite geostazionario OMNISTAR con accuratezza in posizione
submetrica.
A.1.2. Posizionamento in terra
Il sistema GPS impiegato nel rilievo, è composto da un ricevitore Trimble Pathfinder Pro XRS
(12 canali-L1 code and carrier) e da un datarecorder (controller TDS-Recon).
Usa la tecnologia proprietaria Trimble EVEREST per l’eliminazione del segnale di multipath
in ambiente ostile, supporta output NMEA-0183 e input /output RTCM SC-104.
Il PRO XRS consente l’uso del sistema GPS e della correzione differenziale attraverso
OMNISTAR, WAAS, EGNOS, oppure mediante l’uso di un telefonino cellulare con chiamata diretta
o GPRS.
Il sistema DGPS in tempo reale, permette di navigare facilmente sul sito per una verifica o un
aggiornamento dei dati acquisiti.
Il controller TDS-Recon associato al software GeogisCE versioni 9.10/10.00, studiato per
operazioni di rilevamento topografico e GIS, consente all’operatore di “navigare” su mappe raster
georeferenziate (create a partire da formati vettoriali con l’applicatico GEOSW), e costruire il rilevo
direttamente sullo schermo. Ciò è reso possibile mediante l’immissione in GeogisCE dei 7
parametri di roto-traslazione calcolati con il software VERTO 3 dell’I.G.M.; si ottiene così il
passaggio da coordinate geografiche sistema WGS84 a coordinate cartografiche nel sistema
nazionale Gauss-Boaga. Se gli RMS rientrano nelle tolleranze, la posizione del punto desiderato
può venire salvata direttamente nella memoria dello stesso controller.
Il sistema permette inoltre di eseguire la routine inversa, ovvero determinate nella fase di
pianificazione del rilievo topografico i punti di progetto, le loro coordinate possono essere esportate
al software di campagna, pronte per essere utilizzate nel sito.
22
Nell’ambito del progetto tale metodologia operativa è stata applicata nella fase di
acquisizione delle coordinate assolute dei punti di energizzazione (shot point), e nel
picchettamento di una serie di punti atti al posizionamento delle stazioni remote.
La correzione differenziale di codice DGPS è stata ottenuta sia attraverso il provider
OMNISTAR (type VBS), sia sperimentando l’utilizzo del sistema GPRS per connettersi alle
Reference Station della Regione FVG e trasferire via Bluetooth i “pacchetti” a GeogisCE.
POSIZIONAMENTO Posizionamento mare
Modello GPS Trimble AgGPS123
N° canali 12
Correzione DGPS OMNISTAR
Accuratezza Submetrica Posizionamento terra
Modello GPS Trimble Pathfinder Pro XRS
N° canali 12
Correzione DGPS OMNISTAR, WAAS, EGNOS
L’imbarcazione utilizzata per i rilievi nei siti di Palazzolo e Aquileia. E’ visibile l’antenna GPS al centro.
Operazioni topografiche in terra.
23
A.2. Energizzazione
A.2.1. Energizzazione a terra
A.2.1.1. Vibroseis
Il vibratore MiniVIB, montato su camion UNIMOG a 4 ruote motrici, può energizzare sia con
onde P che S, mediante la sostituzione del piatto e la rotazione della massa di controreazione, ed
ha la possibilità di generare sia SV che SH, variando l’azimuth di vibrazione, mediante rotazione
dell'attuatore. Il controllo e la gestione dei parametri del vibratore avviene tramite un PC
interfacciato all’unità di controllo SIB-100. Questa controlla effettivamente l’idraulica del sistema ed
è a sua volta collegata all'interfaccia RTS-100, che costituisce il radio link con il sistema di
registrazione, a sua volta connesso con un’analoga interfaccia, per trasmettere/ricevere i segnali
pilota ed i riferimenti temporali. È possibile generare sweeps da 10 a 550 Hz, (nominale 5-600 Hz)
lineari o non lineari (linear, db/Octave, db/Hertz, T-Power), inserire diversi tipi di rampe, e sono
possibili diversi controlli sull’ampiezza del segnale emesso, sia manuali che automatici.
Il vibratore è dotato di due accelerometri, montati rispettivamente sul piatto e sulla massa di
controreazione, i cui dati possono venire inviati sia al PC, per essere registrati, che al registratore
sismico (in varie modalità), per le funzioni di correlazione. Si possono trasmettere 3 diversi segnali
pilota: a) il segnale sintetico (SYN); b) la composizione degli accelerometri non filtrata (GF); c) la
composizione degli accelerometri filtrata con un filtro taglia alto, per rimuovere le armoniche
superiori.
CARATTERISTICHE Produttore Industrial Vehicles International (IVI)
Modello MiniVib T2500
Intervallo di frequenza 10-550 Hz
Lunghezza massima sweep 60 sec.
Precarico del piatto 1200 kg ca.
Massimo picco di forza teorico 26689 N
Peso della massa di reazione 141 kgf
Superficie della baseplate 6567 cm2
Peso della baseplate 168 kgf
Il vibratore MiniVib T2500 in dotazione all’OGS, in vista laterale e posteriore. L’equipaggio vibrante viene abbassato sul punto di vibrata da un’apposita gru installata sul cassone del camion.
24
A.2.1.2. Massa battente accelerata
La massa battente accelerata (Power assisted Weigth Drop, PWD) è installata sul cassone
di un autocarro Bremach. Il sistema immagazzina energia su un elastico che viene messo in
tensione attraverso il sollevamento idraulico di un pistone solidale alla massa stessa. L’operazione
richiede circa 8 secondi. Il rilascio al suolo avviene attraverso l’impatto quasi istantaneo (8 msec.)
del martello su di una piastra metallica. Il tempo 0 viene fornito da un geofono solidale alla piastra.
CARATTERISTICHE Produttore Geometrics
Modello Power Assisted Weight Drop (PWD)
Installazione Automontato
Tensionamento elastico Idraulico, con motore a benzina (da 5.5 a 18 HP)
Peso massa battente 100 o 300 lbs
Tempo di immagazzinamento energia elastica 8 sec
Tempo medio di rilascio energia al suolo all’impatto 8 msec.
Massa battente accelerata. Gli elementi fondamentali sono indicati in figura. E’ visibile il geofono di time break, a destra della piastra, che viene collegato alla trigger unit (non in figura) del sistema di acquisizione per fornire l’istante esatto di inizio registrazione al momento dell’impatto.
MARTELLO
PIASTRA
ELASTICO
25
A.2.1.3. Fucile sismico
Il fucile sismico in dotazione è del tipo Isotta Gun, il quale utilizza cartucce industriali tipo
S800m/80 calibro 8 prodotte dalla SEI Esplosivi che per l'impiego non necessitano di alcuna
licenza o porto d'armi. La canna del cannoncino viene introdotta ad una profondità di circa 30 cm
in un piccolo foro precedentemente preparato con una piccola trivella a mano.
Per evitare il rinculo ed avere la massima propagazione dell'energia prodotta dall'esplosione
della cartuccia, la base di supporto del cannoncino è trattenuta solidale al terreno dal peso
dell'addetto allo scoppio che vi deve salire sopra. In questo caso, lo scoppio viene eseguito
colpendo con un martello di gomma il percussore del cannoncino. Il TB (tempo di inizio
registrazione) viene registrato de un Box Trigger, attivato dall'impulso captato da un geofono posto
in prossimità della piastra di appoggio del cannoncino.
CARATTERISTICHE Produttore e modello Isotta Gun
Cartucce:
Produttore SEI Esplosivi
Tipo S800m/80
Calibro 8
Profondità media foro 30 cm ca.
Il fucile Isotta Gun per prospezioni ad alta risoluzione. Nella figura a sinistra, durante le operazioni. Visibile il geofono (in rosso) per la trasmissione del time break al sistema di acquisizione.
26
A.2.2. Energizzazione in mare
E’ stato utilizzato un cannone sismico (air gun) alimentato da compressori con il supporto di
bombole ad aria compressa. Per il posizionamento è stato utilizzato un GPS differenziale installato
sul natante. L’impulso FTB di comando all’air gun, inviato dal sistema di navigazione ad intervalli di
10 m (o 10 secondi), è stato trasmesso via radio link all’unità di registrazione sismica situata in
terra ferma.
SORGENTE SISMICA MARE
Produttore BOLT
Modello PAR-BOLDT, Air gun 1200 DH
Volume complessivo 80 cu. in.
Pressione d’esercizio 120 bar
Compressore N°2 Coltri MCH 16
Allestimento del sistema di energizzazione per la sismica a mare.
27
A.3. Ricevitori
A.3.1. Ricevitori a terra
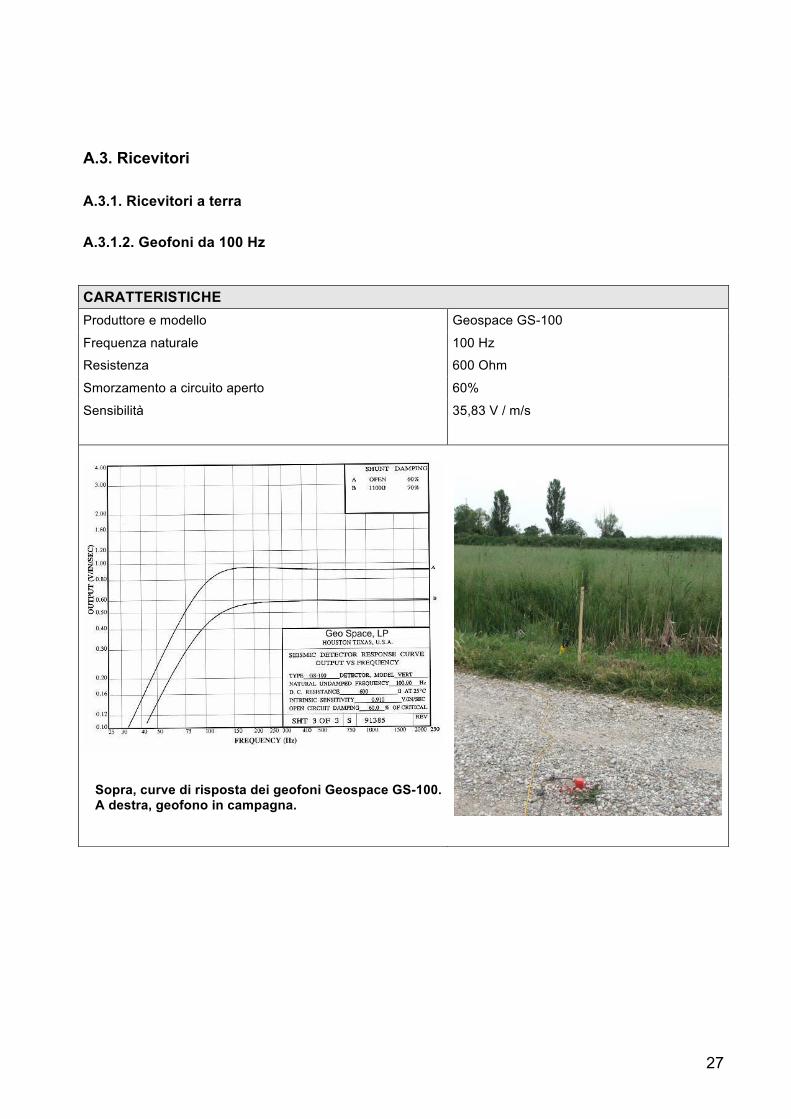
A.3.1.2. Geofoni da 100 Hz
CARATTERISTICHE Produttore e modello Geospace GS-100
Frequenza naturale 100 Hz
Resistenza 600 Ohm
Smorzamento a circuito aperto 60%
Sensibilità 35,83 V / m/s
Sopra, curve di risposta dei geofoni Geospace GS-100. A destra, geofono in campagna.
28
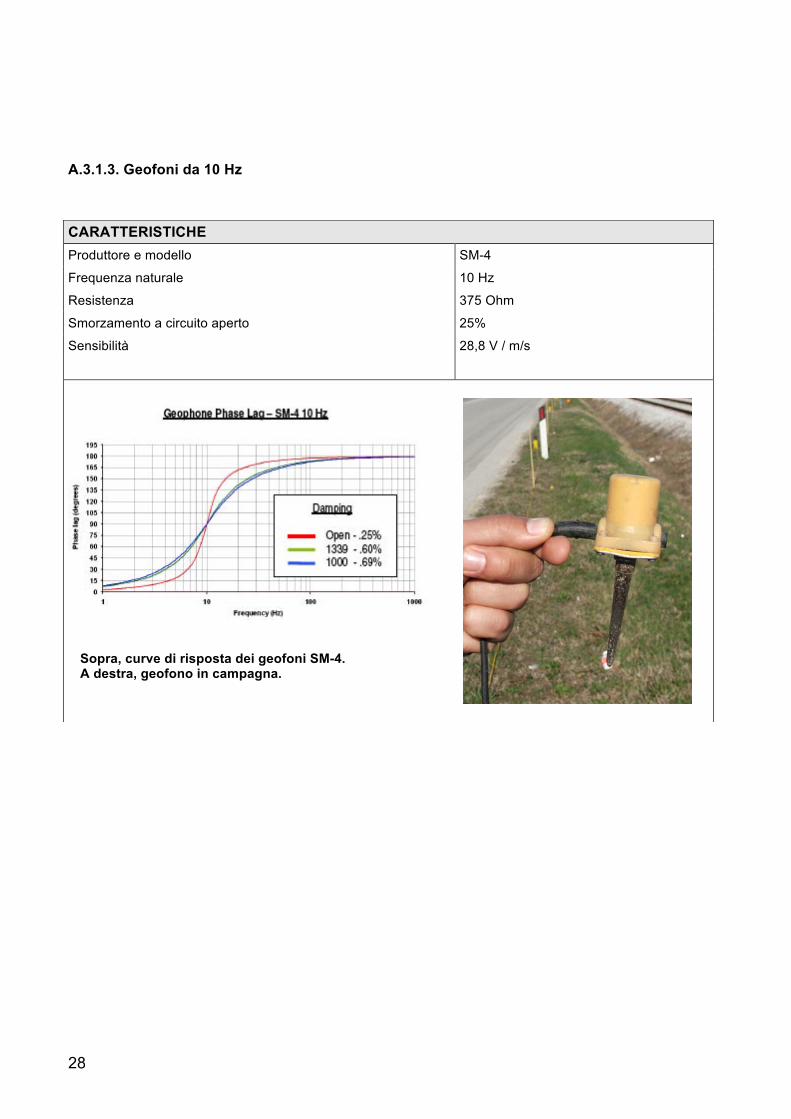
A.3.1.3. Geofoni da 10 Hz
CARATTERISTICHE Produttore e modello SM-4
Frequenza naturale 10 Hz
Resistenza 375 Ohm
Smorzamento a circuito aperto 25%
Sensibilità 28,8 V / m/s
Sopra, curve di risposta dei geofoni SM-4. A destra, geofono in campagna.
29
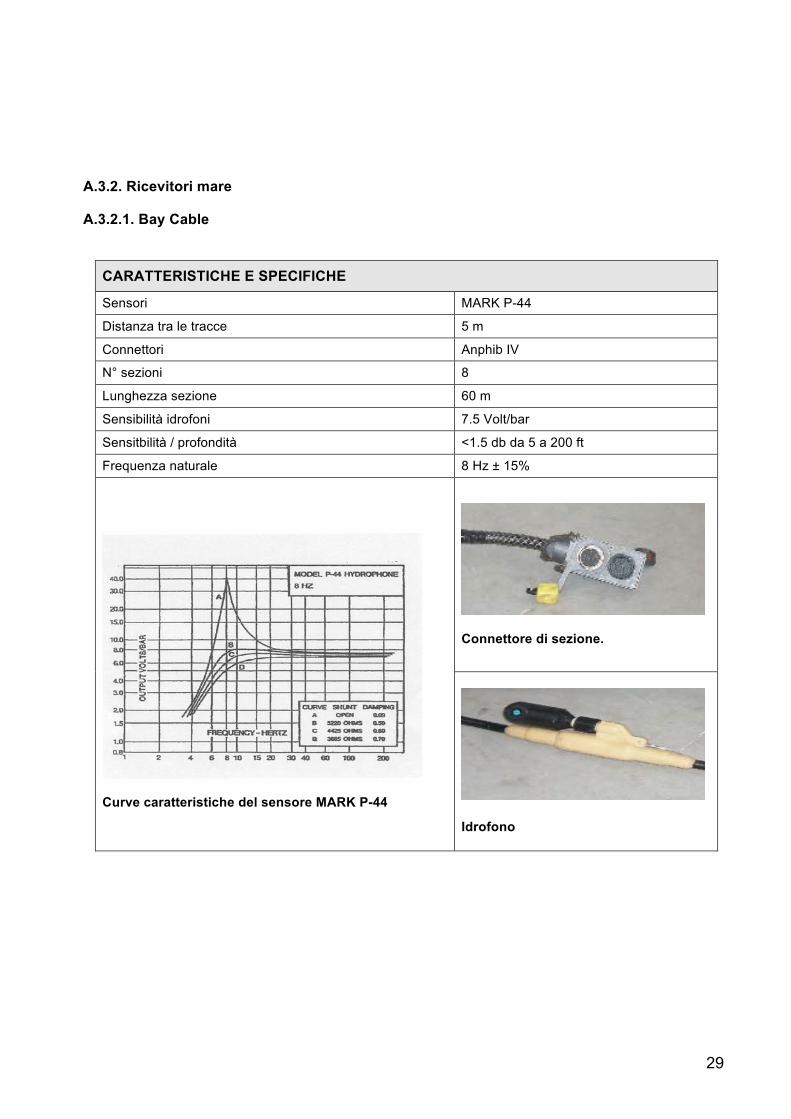
A.3.2. Ricevitori mare
A.3.2.1. Bay Cable
CARATTERISTICHE E SPECIFICHE
Sensori MARK P-44
Distanza tra le tracce 5 m
Connettori Anphib IV
N° sezioni 8
Lunghezza sezione 60 m
Sensibilità idrofoni 7.5 Volt/bar
Sensitbilità / profondità <1.5 db da 5 a 200 ft
Frequenza naturale 8 Hz ± 15%
Connettore di sezione.
Curve caratteristiche del sensore MARK P-44
Idrofono
30
A.3.2.2. Cavo sismico multicanale
CARATTERISTICHE E SPECIFICHE
Produttore TELEDYNE
Modello 178
Lunghezza 120 m
Numero di canali 24
Modello Idrofoni B-1
Lunghezza gruppi attivi 3.25 m
Idrofoni / gruppo 14
Distanza idrofoni / gruppo 0.25 m
Intervallo gruppi attivi (intervallo tracce) 5 m
Profondità di esercizio 0.5 m
Cavo sismico multicanale assicurato alla poppa dell’imbarcazione Castorino II.
31
A.4. Registrazione
SPECIFICHE TECNICHE Produttore SUMMIT DMT
Massimo numero di canali 300 (su 150 box a 2 canali)
Intervallo di campionamento 1/48, 1/32, 1/16, 1/8, ¼, ½, 1, 2, 4, 8 ms
COMPONENTI DEL SISTEMA Unità remote (Remote Data Acquisition Unit - RDAU) 2 canali 144
Ripetitori (Repeater Unit - RU) 13
Unità trigger (Trigger Time Break Unit – TBU) 5
Computer palmari per l’assegnazione degli indirizzi 5
Componenti del sistema di registrazione SUMMIT DMT.
32
CONFIGURAZIONE
Un esempio di configurazione del sistema di acquisizione SUMMIT.
CARATTERISTICHE CAVO Produttore DMT
Modello Summit
Tipologia Piattina bipolare
Resistenza di terminazione 120 Ohm
Lunghezza bobina singola Circa 250 m
Numero di bobine 25
Connettori per collegamento Di tipo snap-on
33
APPENDICE B - MEZZI
B.1. Automezzi
Modello Targa Tipo Funzione
FIAT PANDA 4x4 BW404WM AUTOVETTURA Line checking
HYUNDAI GALLOPER ZA935FL AUTOVETTURA Line checking, registro
LAND ROVER DEFENDER 110 ZA416NA AUTOVETTURA Line checking
BREMACH GR35V TS343227 PROMISCUO Trasporto materiale, Energizzazione con fionda
SCAM BW628PM PROMISCUO Trasporto materiale
MERCEDES BENZ UNIMOG BY406ZB AUTOCARRO Energizzazione minivib
OPEL VIVARO DF722SV FURGONE Registro
FIAT DUCATO CR808TL FURGONE Trasporto materiale
Autocarro SCAM per il trasporto dei materiali
Allestimento del registro.
34
B.2. Imbarcazioni Nelle tabelle seguenti sono riportate le caratteristiche principali delle tre imbarcazioni
utilizzate per l’acquisizione dei dati.
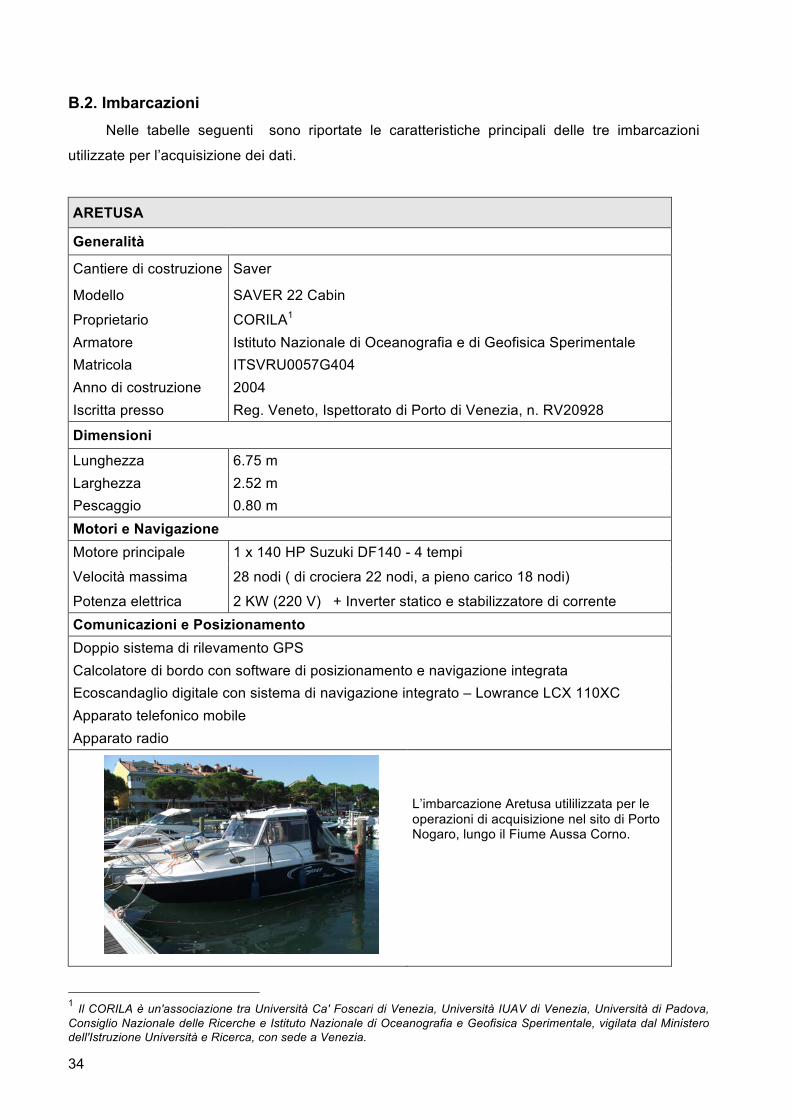
ARETUSA
Generalità
Cantiere di costruzione Saver
Modello SAVER 22 Cabin
Proprietario CORILA1 Armatore Istituto Nazionale di Oceanografia e di Geofisica Sperimentale Matricola ITSVRU0057G404 Anno di costruzione 2004 Iscritta presso Reg. Veneto, Ispettorato di Porto di Venezia, n. RV20928
Dimensioni
Lunghezza 6.75 m Larghezza 2.52 m Pescaggio 0.80 m Motori e Navigazione Motore principale 1 x 140 HP Suzuki DF140 - 4 tempi
Velocità massima 28 nodi ( di crociera 22 nodi, a pieno carico 18 nodi)
Potenza elettrica 2 KW (220 V) + Inverter statico e stabilizzatore di corrente Comunicazioni e Posizionamento Doppio sistema di rilevamento GPS Calcolatore di bordo con software di posizionamento e navigazione integrata Ecoscandaglio digitale con sistema di navigazione integrato – Lowrance LCX 110XC Apparato telefonico mobile Apparato radio
L’imbarcazione Aretusa utililizzata per le operazioni di acquisizione nel sito di Porto Nogaro, lungo il Fiume Aussa Corno.
1 Il CORILA è un'associazione tra Università Ca' Foscari di Venezia, Università IUAV di Venezia, Università di Padova, Consiglio Nazionale delle Ricerche e Istituto Nazionale di Oceanografia e Geofisica Sperimentale, vigilata dal Ministero dell'Istruzione Università e Ricerca, con sede a Venezia.
35
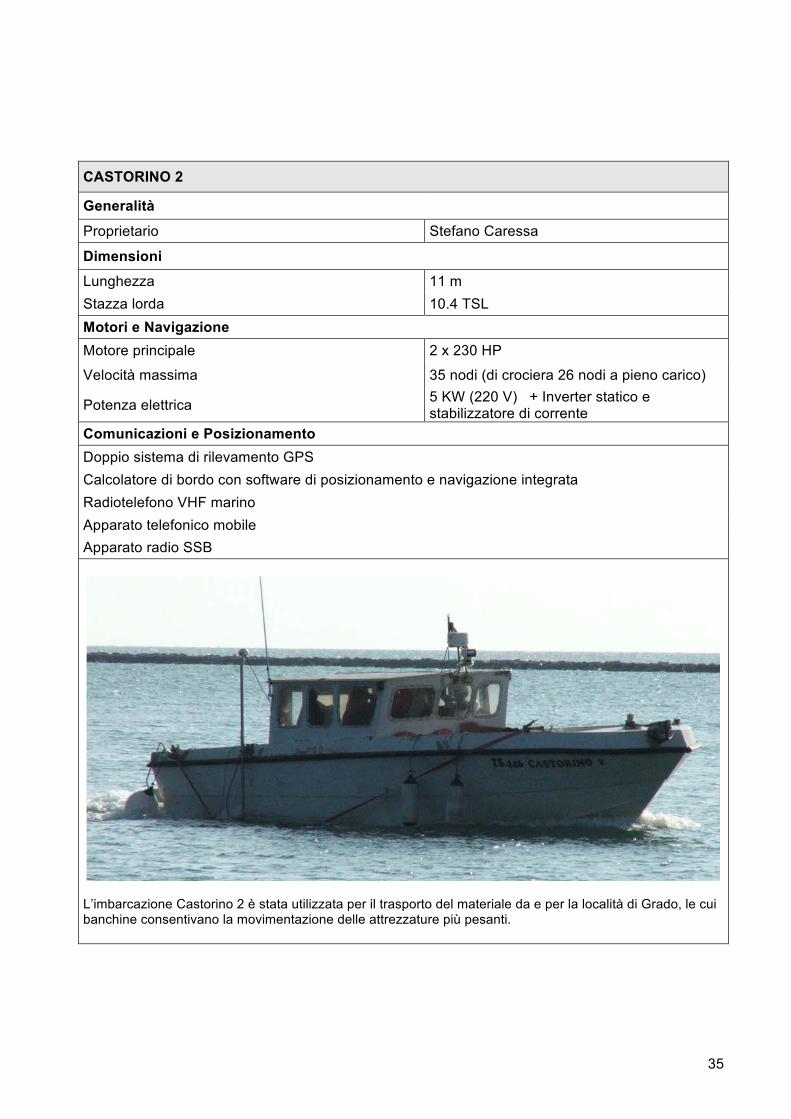
CASTORINO 2
Generalità
Proprietario Stefano Caressa
Dimensioni
Lunghezza 11 m Stazza lorda 10.4 TSL Motori e Navigazione Motore principale 2 x 230 HP
Velocità massima 35 nodi (di crociera 26 nodi a pieno carico)
Potenza elettrica 5 KW (220 V) + Inverter statico e stabilizzatore di corrente
Comunicazioni e Posizionamento Doppio sistema di rilevamento GPS Calcolatore di bordo con software di posizionamento e navigazione integrata Radiotelefono VHF marino Apparato telefonico mobile Apparato radio SSB
L’imbarcazione Castorino 2 è stata utilizzata per il trasporto del materiale da e per la località di Grado, le cui banchine consentivano la movimentazione delle attrezzature più pesanti.
36
Generalità
Modello CONERO DRIFTING
Proprietario Giorgio Marchioni
Dimensioni
Lunghezza 6.04 m Larghezza 2.17 m Pescaggio 0.15 m Motori e Navigazione Motore principale Evinrude hi-tech 150
Velocità massima 43 nodi
Comunicazioni e Posizionamento Sistema di rilevamento GPS Ecoscandaglio digitale con sistema di navigazione integrato Radar e video plotter Apparato radio
L’imbarcazione utilizzata per le operazioni di acquisizione nel sito di Palazzolo dello Stella e di Aquileia.