Relazione sperimentale: Mappatura di un campo magnetico * MACI Samuele Politecnico di Torino Anno Accademico 2011/2012 [email protected]KUGATHASAN Ramshan Politecnico di Torino Anno Accademico 2011/2012 [email protected]PALAZZOLO Emanuele Politecnico di Torino Anno Accademico 2011/2012 [email protected]GHIOZZI Fabio Politecnico di Torino Anno Accademico 2011/2012 [email protected]BOETTI Gustavo Politecnico di Torino Anno Accademico 2011/2012 [email protected]Data esperienza: 7 dicembre 2011 Data di consegna: 12 dicembre 2011 * Relazione redatta completamente in L A T E X e i grafici sono stati realizzati con Matlab 1
Transcript
Relazione sperimentale: Mappatura di un campomagnetico∗
1 ObiettiviGli obiettivi della relazione sperimentale sono:
1. Realizzare la mappatura del campo magnetico generato da un magnetepermanente sagomato a forma di disco.
2. Determinare il valore del momento magnetico del disco.
2 Materiale occorrenteNell’esperienza saranno adoperate le seguenti apparecchiature:
Magnete permanente a forma di disco fissato su una torretta
Sonda ad effetto Hall per la misurazione della componente perpendicolarealla sonda di ~B
Rilevatore un rilevatore elettronico che elabora i dati ricevuti dalla sonda Hallmostrando sul display il valore di | ~B| espresso in [Gauss]1
Supporto per la sonda tale supporto consente di spostare la sonda su unpiano xy; tale supporto è dotato due cursori che spostano la sonda (icursori hanno scale graduate con una sensibilità di 0.5cm)
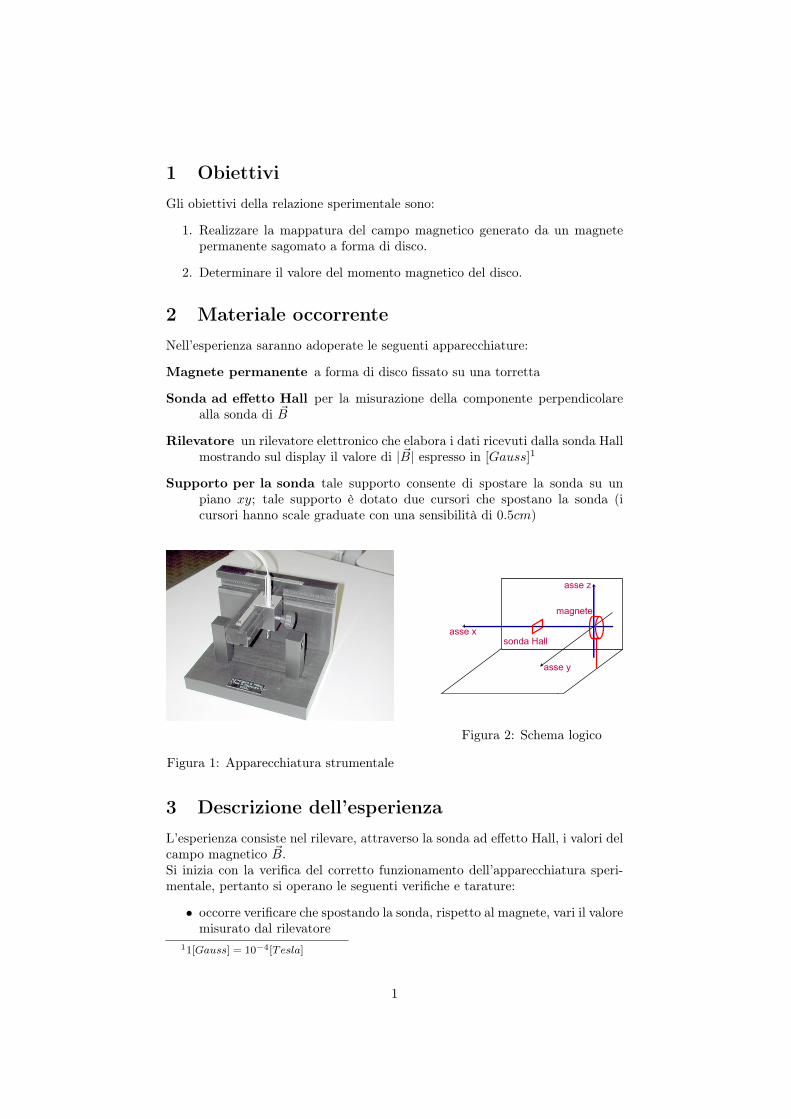
Figura 1: Apparecchiatura strumentale
asse y
asse x
asse z
magnete
sonda Hall
Figura 2: Schema logico
3 Descrizione dell’esperienzaL’esperienza consiste nel rilevare, attraverso la sonda ad effetto Hall, i valori delcampo magnetico ~B.Si inizia con la verifica del corretto funzionamento dell’apparecchiatura speri-mentale, pertanto si operano le seguenti verifiche e tarature:
• occorre verificare che spostando la sonda, rispetto al magnete, vari il valoremisurato dal rilevatore
11[Gauss] = 10−4[Tesla]
1
• occorre verificare il valore di fondo misurato dalla sonda (data l’entità delmagnete adoperato ci si aspetta che il valore di fondo sia nullo)
• occorre cercare il piano xy in cui il modulo del campo magnetico siamassimo, a parità di angolo (si modifica cioè solo l’altezza della sonda).
• occorre cercare l’asse del magnete, spostando la sonda lungo l’asse y finoa trovare il punto in cui il modulo di ~B è massimo, a parità di tutti glialtri parametri (z e ϑ).
Operate le precedenti verifiche si passa alla vera e propria esperienza sperimen-tale, tale esperienza consiste di tre punti
Valutazione dell’orientazione del vettore di induzione magnetica Si pro-cede ruotando la sonda rispetto all’asse z, con la sonda posta nel puntoricavato precedentemente in cui si ha il massimo modulo di ~B, si eseguo-no le misurazioni per ogni angolo misurabile (la scala graduata consentemisurazioni ogni 15◦)
Valutazione dell’andamento di ~B lungo l’asse del magnete nell’esperienzaè chiaro che l’asse del magnete è parallelo all’asse x; pertanto si sposta lasonda lungo l’asse x misurando il valore del modulo di induzione magneti-ca (si effettuano misurazioni per ogni centimetro fino ad arrivare al fondodella scala misurabile, misurazioni da 0 a 10 cm)
Mappatura del campo magnetico lungo il piano xy Considerando per ra-gioni di simmetria che la componente lungo z sia nulla, si effettua unamappatura lungo x e lungo y con un intervallo di 2 cm per asse; per ognipunto si può misurare il valore del campo attraverso le componenti Bx eBy oppure ruotando la sonda finchè non si trova il valore massimo, in talmodo si ha il valore massimo e l’angolo.
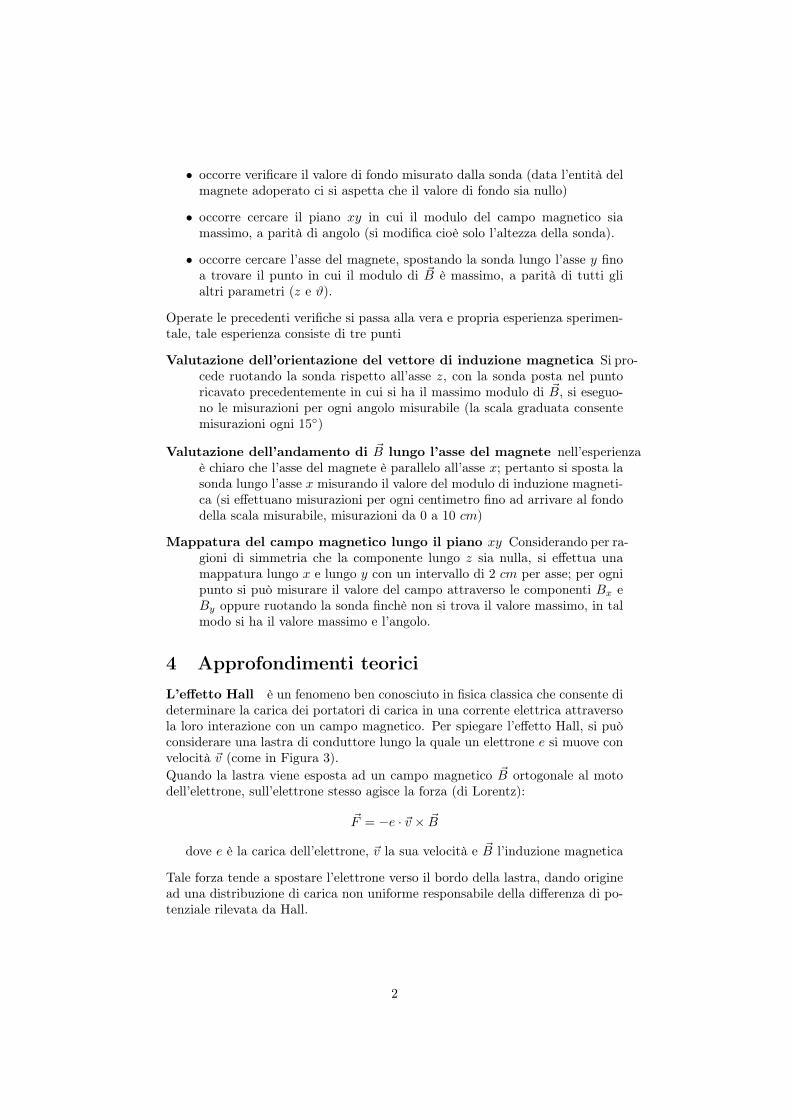
4 Approfondimenti teoriciL’effetto Hall è un fenomeno ben conosciuto in fisica classica che consente dideterminare la carica dei portatori di carica in una corrente elettrica attraversola loro interazione con un campo magnetico. Per spiegare l’effetto Hall, si puòconsiderare una lastra di conduttore lungo la quale un elettrone e si muove convelocità ~v (come in Figura 3).Quando la lastra viene esposta ad un campo magnetico ~B ortogonale al motodell’elettrone, sull’elettrone stesso agisce la forza (di Lorentz):
~F = −e · ~v × ~B
dove e è la carica dell’elettrone, ~v la sua velocità e ~B l’induzione magnetica
Tale forza tende a spostare l’elettrone verso il bordo della lastra, dando originead una distribuzione di carica non uniforme responsabile della differenza di po-tenziale rilevata da Hall.
2
La spira circolare Per misurare il momento magnetico ~m del magnete si im-magina il magnete stesso come una spira circolare (Figura 4) ortogonale all’assex′ percorsa da corrente continua.Il campo magnetico lungo l’asse della spira è, per ragioni di simmetria, orientatoparallelamente all’asse x′. Per dimostrarlo si può dividere la spira in tratti infi-nitesimi dl, possiamo quindi decomporre d ~B scrivendolo come somma vettorialedi una componente parallela al piano xz e al piano yz
d ~B = d ~Bx + d ~By
si può quindi osservare che i contributi parallelo all’asse y di due elementi dldiametralmente opposti si elidono, quindi contribuiscono solo le componentid ~Bx. Si può dimostrare che il campo magnetico generato da una spira rispettala seguente relazione
~B =µ0
4 · π· 2 ·m(R2 + x′2
) 32
· ux
5 Dati sperimentali, Grafici e OsservazioniVerifiche e tarature della strumentazione Si osserva, come intuibile, che
spostando la sonda rispetto al magnete vari il valore del campo magneticomisurato, inoltre ponendo la sonda a una grande distanza si ha un valoredi fondo scala di 0 Gauss; si osserva inoltre che spostando verticalmentela sonda (posta nel punto (1, y), con y generico) si riesce a stabilire una“giusta” altezza entro la quale si ha il modulo massimo misurato.Spostando la sonda lungo y si ha che ha il massimo valore nel puno (1, 0).
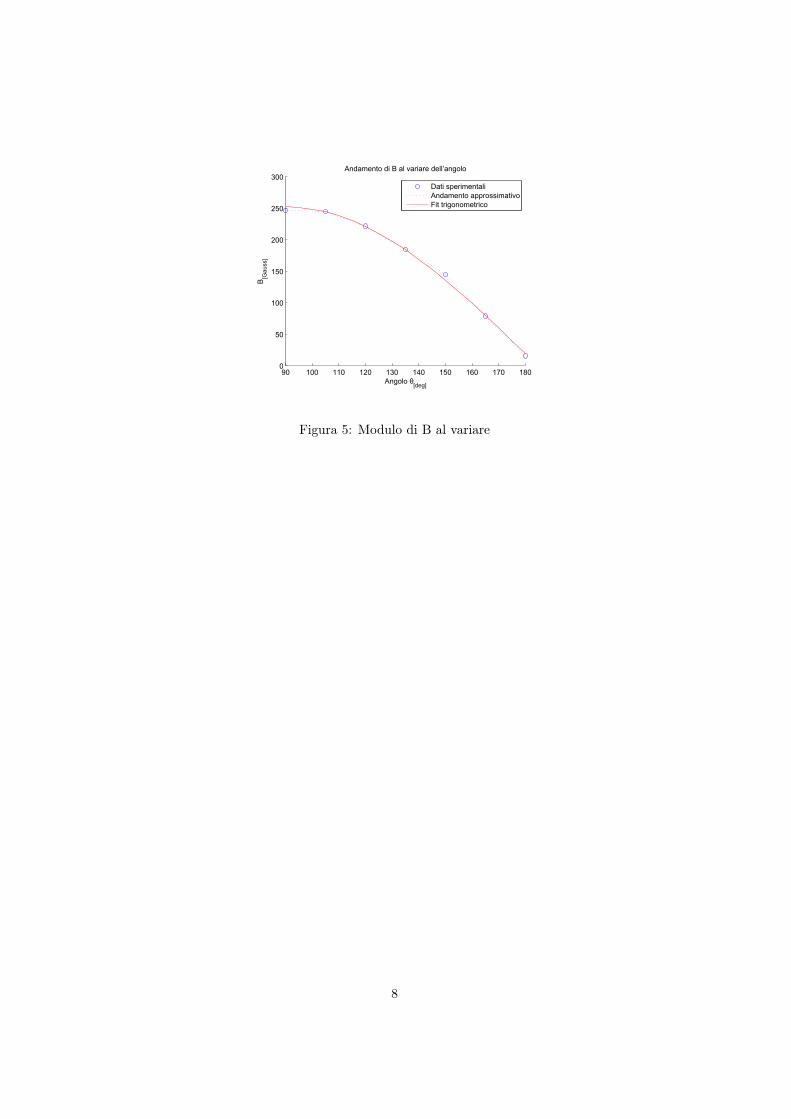
Valutazione dell’orientazione del vettore di induzione magnetica Ruotandola sonda si hanno i seguenti valori sperimentali (ϑ = ϑmis+90◦, in quanto,la sonda rileva la componente perpendicolare ad essa, pertanto si sommaall’angolo misurato un angolo retto (90◦))
Si può osservare che i dati sperimentali hanno un andamento di tipo si-nusoidale; il giusto coefficiente è calcolato mediante il metodo dei minimiquadrati attraverso il software di calcolo numerico Matlab.É possibile, anche, dedurre tale andamento per via teorica, in quanto lasonda misura la forza Hall, legata alla forza di Lorentz 2, in quest’ultima
2 ~F = q · ~vd × ~B
3
forza nella definizione vi è la presenza di un prodotto esterno che lavoran-do con i moduli delle quantità vettoriali impone la presenza di un fattoremoltiplicativo di tipo sinusoidale.
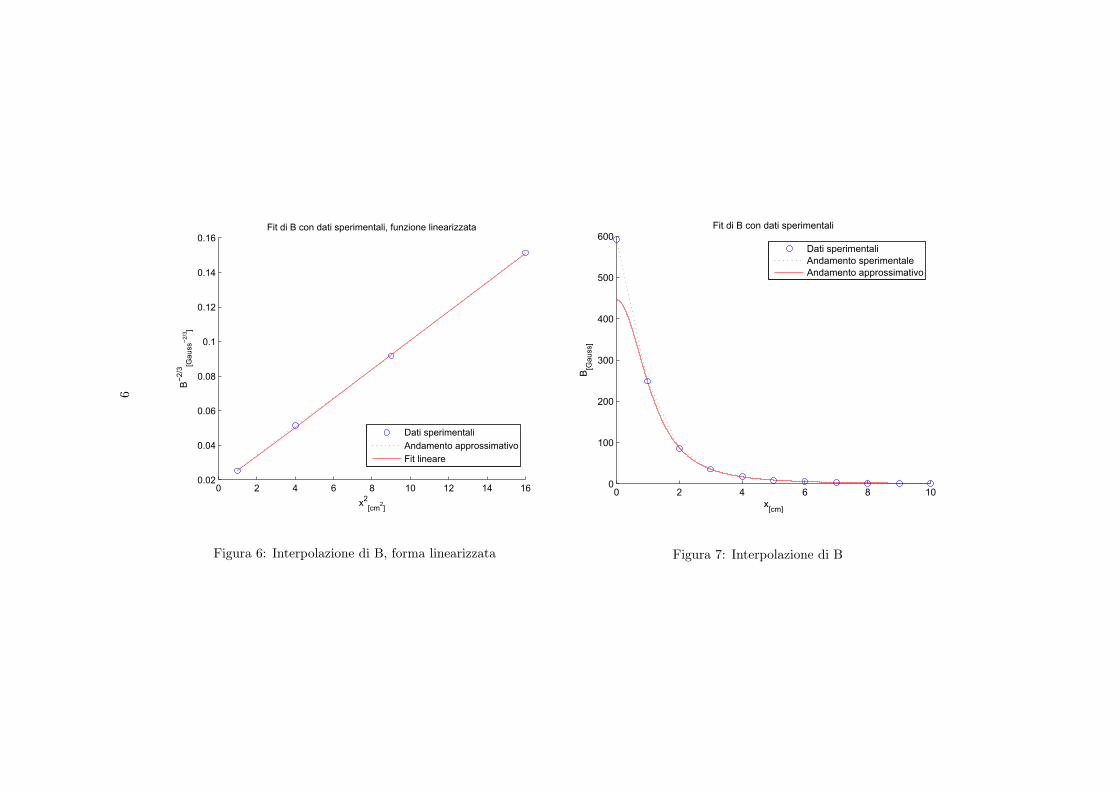
Valutazione dell’andamento di ~B lungo l’asse del magnete Allontanandola sonda dal magnete, lungo l’asse x, si hanno i seguenti dati sperimentali
x[cm] | ~B|[Gauss]
0 5921 2492 863 364 175 86 57 38 09 010 0
Tabella 2: Andamento di | ~B| lungo l’asse x
Come era intuibile si ha che allontanandosi dal magnete il valore di | ~B|diminuisce, poichè come espresso nei cenni teorici si ha che
B =µ0
4 · π· 2 ·m(R2 + x2)
32
pertanto è possibile determinare il valore del momento magnetico, ~m, e ilvalore del raggio del magnete, R.Per determinare tali caratteristiche è necessario riuscire ad avere un’equa-zione che riesca ad approssimare bene i dati sperimentali; si procede conla forma linearizzata della relazione precedente
Y = B−23 =
(4 · πµ0
) 23
· R2 + x2
(2 ·m)23
=
(2 · πµ0 ·m
) 23
·(R2 + x2
)= a ·X + b⇒
⇒
b = a ·R2
a =
(2 · πµ0 ·m
) 23⇒
R =
√b
a
m =2 · πµ0 · a
32
[a] = [Gauss]−23 · [cm]−2
[b] = [Gauss]−23
Attraverso il software di calcolo numerico si ottengono, rapidamente, ivalori dei coefficienti della linearizzazione Y = a ·X + b 3
a ≈ 0.0084 b ≈ 0.01713µ0 = 4 ·10−7 ·π se si hanno le misurazioni di B in Tesla e x in m; poichè si hanno i valori
misurati in Gauss e x in cm si ha che µ0 = 4 · π · 10−1
4
R =
√b
a≈√
0.0171
0.0084≈ 1.43[cm]
m =2 · πµ0 · a
32
=2 · π
4 · π · 10−1 · a 32
=5
a32
≈ 5
7.7937 · 10−4≈ 6500[A·cm2]
A questo punto è necessario ottenere anche le incertezze legate ai valoridi R e m; pertanto poichè l’interpolazione dei dati è stata eseguita conil metodo dei minimi quadrati, si utilizzano le seguenti formule per lavalutazione dell’incertezza:
δa =
√√√√√√√√√√n
n− 2·
n∑i=1
(yi − a · xi − b)2 ·
n∑i=1
xi
n ·n∑
i=1
xi2 −
(n∑
i=1
xi
)2
δb =
√√√√√√√√√√1
n− 2·
n∑i=1
(yi − a · xi − b)2 ·
n∑i=1
xi
n ·n∑
i=1
xi2 −
(n∑
i=1
xi
)2
pertanto svolgendo i calcoli si ha che l’incertezza del parametro a è 0.0013e che l’incertezza del parametro b è 6.2893 · 10−4. Dalle incertezze su a eb attraverso lo studio della propagazione dell’errore si ha che4
δm =
√(∂m
∂a· δa)2
=
∣∣∣∣∂m∂a · δa∣∣∣∣ =
∣∣∣∣∣2 · πµ0· ∂a
− 32
∂a· δa
∣∣∣∣∣ =∣∣∣∣3 · π · δaµ0 · a
52
∣∣∣∣ ≈ 245
δR =
√(∂R
∂a· δa)2
+
(∂R
∂b· δb)2
=
√√√√(√b · ∂a− 12
∂a· δa
)2
+
(1√a· ∂b
12
∂b· δb
)2
=
=
√b
4 · a3· δ2a+ 1
4 · a · b· δ2b ≈ 0.04
in seguito a tale analisi si può quindi affermare che
R = (1.43± 0.04)[cm]
m = (6500± 245)[A·cm2]
Per il calcolo delle incertezze ci si è limitati all’uso delle prime cinquemisurazioni in quanto aumentando il numero delle misurazioni si avrebbeun’incertezza sempre maggiore; tale situazione è spiegabile dal fatto che lemisurazioni sono state effettuante in modo abbastanza grossolano poichèla sonda Hall poteva, involontariamente, essere spostata dalla sua posizio-ne (traslata verso l’alto/basso). Sfruttando le prime cinque misurazioni siha un’incertezza accettabile sia per la misura del raggio del magnete sia
4nell’analisi della propagazione dell’errore si considera il valore µ0 non affetto da incertezze
5
per la misura del momento magnetico (anche se in quest’ultimo caso si hasostanzialmente una cifra esatta); controllando i valori di errore relativopercentuale5 si osserva che le misurazioni possono comunque essere rite-nute buone in quanto si ha un per il momento magnetico un εr% pari al3.76% e per il raggio del magnete si ha un εr% pari al 3.15%
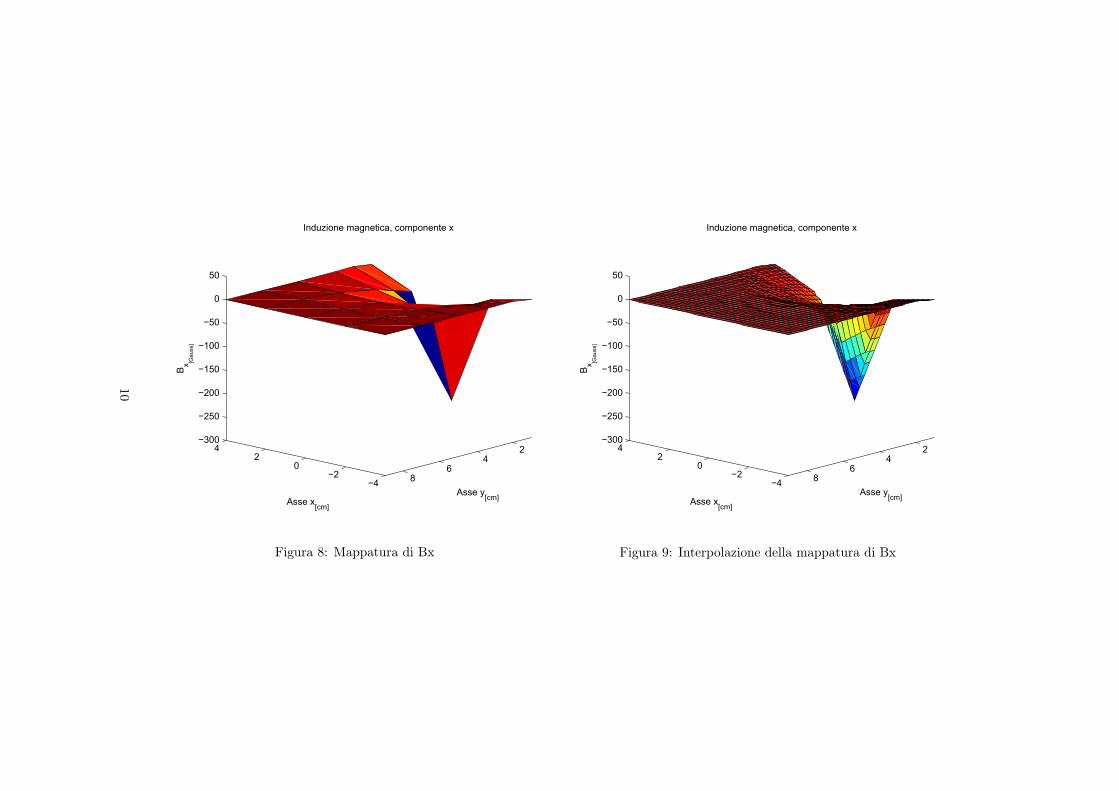
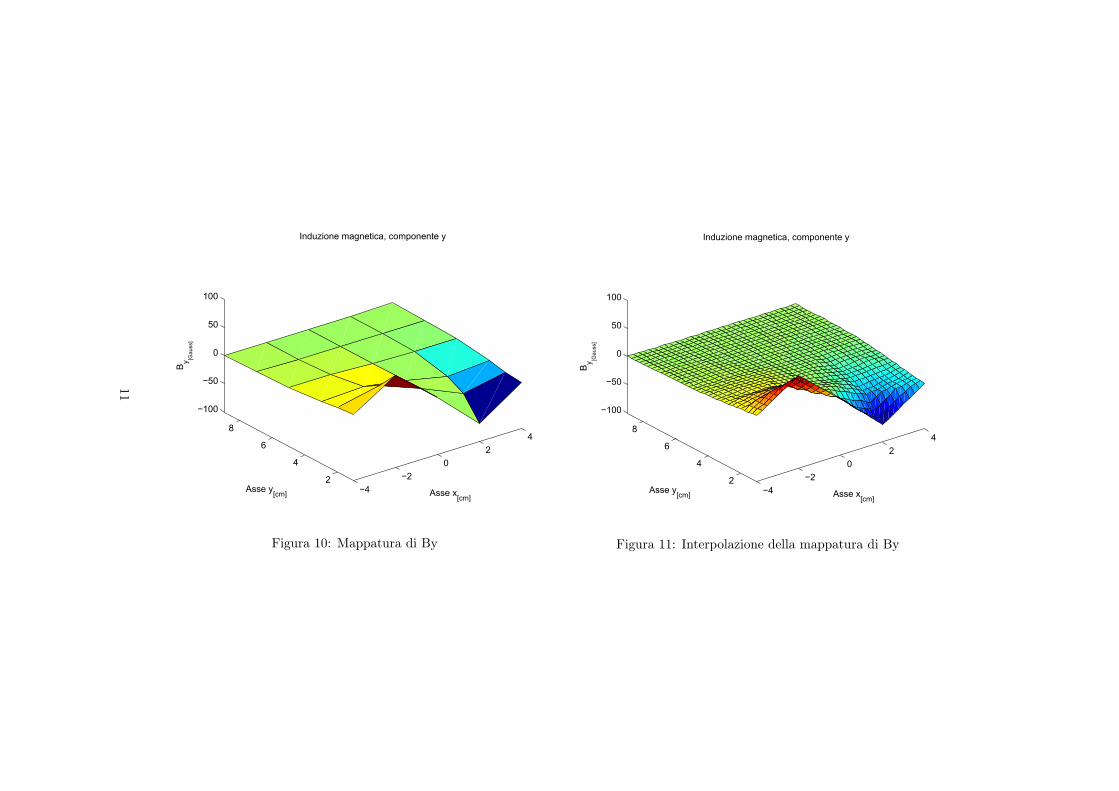
Mappatura del campo magnetico lungo il piano xy I dati rilevati dallemisurazioni sono
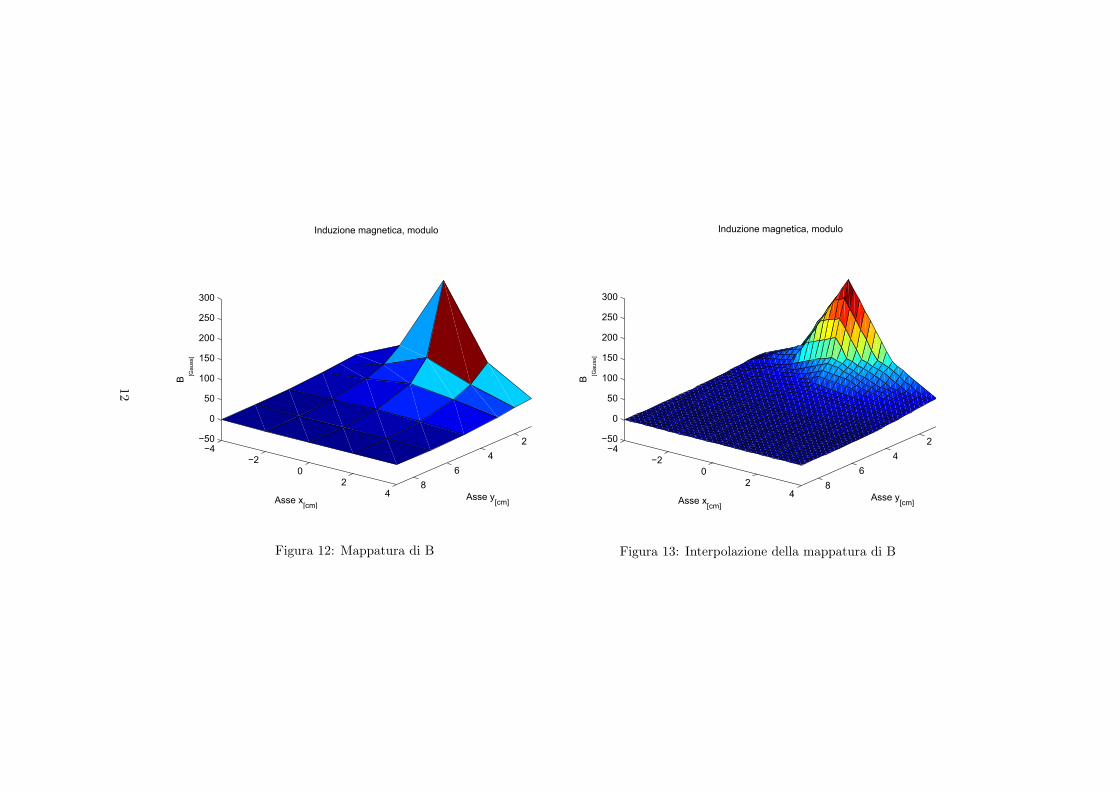
Si osserva dai valori rilevati e dai grafici (Figura 8, Figura 10, Figura 12)6che:
5εr% =εass
misesatta· 100
6sono state realizzate le interpolazioni tridimensionali delle componenti rilevate/ricavate(Figura 9, Figura 11, Figura 13) per dare un’idea dell’andamento di Bx, By e B che non siamolto frammentaria come nei dati rilevati
6
• il modulo di Bx è massimo (inteso in valore assoluto) vicino al magne-te; allontanandosi da esso tale valore diminuisce molto rapidamente.
• il modulo di By cambia segno, tale valore ha come frontiera y = 0.
• il modulo di B è massimo nei pressi del magnete.
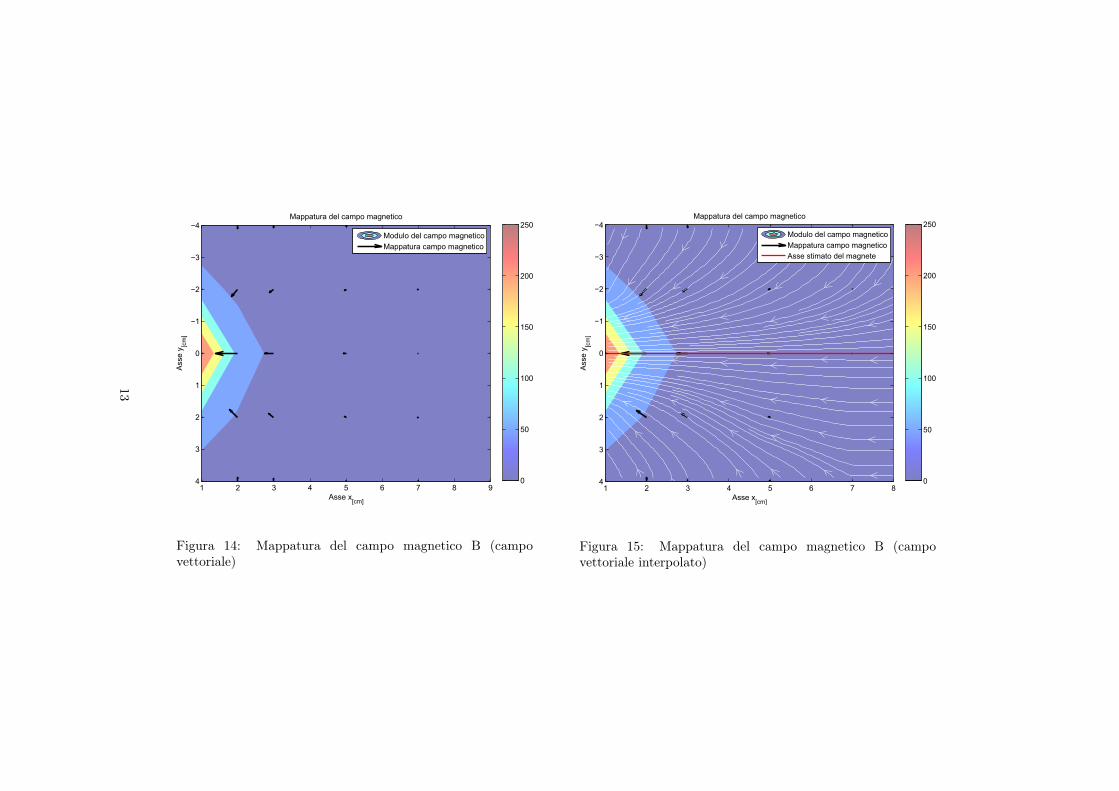
Effettuando la mappatura del campo vettoriale ~B (Figura 14) 7 si osser-va che tutti i vettori rappresentati sono diretti verso l’origine (punto dicoordinate (0, 0)); questo è spiegabile dalla polarizzazione esposta dal ma-gnete, e poichè le frecce sono “attratte” e non respinte si può facilmentededurre che la polarizzazione del magnete esposta alla regione di spazioesaminata è negativa.
ve
B
+ + + + + + + + +
- - - - - - - - -
Figura 3: Schematizzazione effetto Hall
rB
dB
dB asse xxR
dl
m
Figura 4: Schematizzazione di una spiracircolare
7è stato realizzata l’interpolazione del campo vettoriale rilevato (Figura 15) per dare un’ideadell’andamento del campo vettoriale che non sia molto frammentaria come nei dati rilevati
7
90 100 110 120 130 140 150 160 170 1800
50
100
150
200
250
300Andamento di B al variare dell’angolo
B[G
auss
]
Angolo θ[deg]
Dati sperimentaliAndamento approssimativoFit trigonometrico
Figura 5: Modulo di B al variare
8
0 2 4 6 8 10 12 14 160.02
0.04
0.06
0.08
0.1
0.12
0.14
0.16Fit di B con dati sperimentali, funzione linearizzata
B−
2/3 [G
auss
−2/
3 ]
x2[cm
2]
Dati sperimentali
Andamento approssimativo
Fit lineare
Figura 6: Interpolazione di B, forma linearizzata
0 2 4 6 8 100
100
200
300
400
500
600Fit di B con dati sperimentali
B[G
auss
]
x[cm]
Dati sperimentaliAndamento sperimentaleAndamento approssimativo
Figura 7: Interpolazione di B
9
−4−2
02
4 24
68
−300
−250
−200
−150
−100
−50
0
50
Asse y[cm]
Induzione magnetica, componente x
Asse x[cm]
Bx [G
auss
]
Figura 8: Mappatura di Bx
−4−2
02
4 24
68
−300
−250
−200
−150
−100
−50
0
50
Asse y[cm]
Induzione magnetica, componente x
Asse x[cm]
Bx [G
auss
]
Figura 9: Interpolazione della mappatura di Bx
10
−4
−2
0
2
4
2
4
6
8
−100
−50
0
50
100
Asse x[cm]
Induzione magnetica, componente y
Asse y[cm]
By [G
auss
]
Figura 10: Mappatura di By
−4
−2
0
2
4
2
4
6
8
−100
−50
0
50
100
Asse x[cm]
Induzione magnetica, componente y
Asse y[cm]
By [G
auss
]
Figura 11: Interpolazione della mappatura di By
11
−4−2
02
4
2
4
6
8
−50
0
50
100
150
200
250
300
Asse y[cm]
Induzione magnetica, modulo
Asse x[cm]
B[G
auss
]
Figura 12: Mappatura di B
−4−2
02
4
2
4
6
8
−50
0
50
100
150
200
250
300
Asse y[cm]
Induzione magnetica, modulo
Asse x[cm]
B[G
auss
]
Figura 13: Interpolazione della mappatura di B
12
Mappatura del campo magnetico
Ass
e y [c
m]
Asse x[cm]
−4
−3
−2
−1
0
1
2
3
41 2 3 4 5 6 7 8 9
Modulo del campo magnetico
Mappatura campo magnetico
0
50
100
150
200
250
Figura 14: Mappatura del campo magnetico B (campovettoriale)
Mappatura del campo magnetico
Ass
e y [c
m]
Asse x[cm]
−4
−3
−2
−1
0
1
2
3
41 2 3 4 5 6 7 8
Modulo del campo magnetico
Mappatura campo magnetico
Asse stimato del magnete
0
50
100
150
200
250
Figura 15: Mappatura del campo magnetico B (campovettoriale interpolato)
13
�clc;
2 clear all;close all;
4 %orientazione del vettore B;theta = 90:15:180;
6 B = [247, 245, 222, 185, 145, 79, 16];%poichè il sensore misura il campo perpendicolare alla sonda gli angoli
8 %bisogna itenderli sfasati di 90◦
figure;10 hold on;
%figure;12 hold on;
title(’Andamento di B al variare dell’’angolo ’);14 ylabel(’B_{[Gauss]}’),xlabel(’{Angolo \theta}_{[deg]}’);