Università degli Studi Roma Tre Dipartimento di Ingegneria Corso di Laurea Magistrale in Ingegneria delle Infrastrutture Viarie e Trasporti Relazione di fine tirocinio Acquisizione delle competenze informatiche necessarie per l’elaborazione di segnali elettromagnetici acquisiti mediante indagine Georadar Tutor universitario: Prof. Ing. Calvi Alessandro Tirocinante: Pascale Maria Antonietta Anno Accademico 2016/2017
Transcript
Università degli Studi Roma Tre
Dipartimento di Ingegneria
Corso di Laurea Magistrale in
Ingegneria delle Infrastrutture Viarie e Trasporti
Relazione di fine tirocinio
Acquisizione delle competenze informatiche necessarie per
l’elaborazione di segnali elettromagnetici acquisiti
mediante indagine Georadar
Tutor universitario:
Prof. Ing. Calvi Alessandro
Tirocinante:
Pascale Maria Antonietta
Anno Accademico 2016/2017
- 1 -
SOMMARIO
1. PREMESSA 2
2. INTRODUZIONE 3
3. LA TECNOLOGIA GEORADAR GPR 5
4. ACQUISIZIONE DEI DATI GPR 7
5. VISUALIZZAZIONE DEL SEGNALE GPR 9
6. MATLAB – MATRIX LABORATORY 10
7. IL SEGNALE GPR IN AMBIENTE MATLAB 13
7.1 Apertura e lettura dei dati radar 13
7.2 Rappresentazione grafica dei dati della matrice 15
7.3 Normalizzazione del segnale 17
7.4 Taglio del segnale 18
7.5 Realizzazione di un codice di filtraggio 20
7.6 Calcolo della costante dielettrica relativa 21
7.7 Rappresentazione grafica post-processing 23
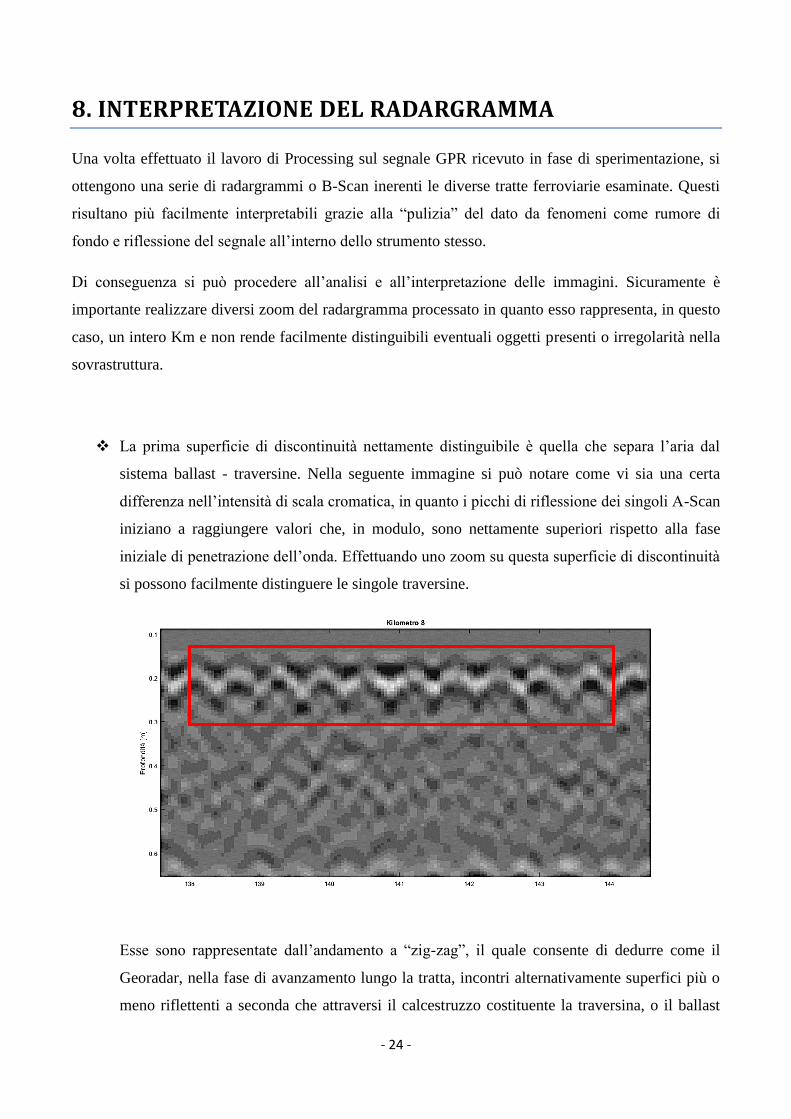
8. INTERPRETAZIONE DEL RADARGRAMMA 24
9. CONCLUSIONI 28
- 2 -
1. PREMESSA
L’oggetto della seguente attività di tirocinio riguarda il conseguimento delle competenze
informatiche necessarie per poter studiare ed analizzare la contaminazione della sovrastruttura
ferroviaria e, nello specifico, dello strato della massicciata ferroviaria, noto anche con il termine
“ballast”.
Ciò si è reso possibile attraverso l’utilizzo di specifici software progettati per l’acquisizione di dati
ottenuti tramite un sistema georadar (GPR), e l’elaborazione grafica dei suddetti tramite il software
MatLab.
Il tirocinio ha avuto luogo presso il Laboratorio di Infrastrutture Viarie – Dipartimento di Ingegneria
dell’Università degli Studi Roma Tre ed ha interessato il periodo intercorso tra la data del 10/04/2017
ed il 26/05/2017, per una durata complessiva di 150 ore, corrispondenti a 6 CFU (Crediti Formativi
Universitari).
- 3 -
2. INTRODUZIONE
L’attività di tirocinio segue un lavoro di ricerca iniziato già da diversi anni e che si pone come
obiettivo la valutazione dei livelli di inquinamento (fouling), il quale può interessare l’intera
massicciata che caratterizza la sovrastruttura ferroviaria.
Ciò è di notevole importanza, in quanto, la qualità e la condizione dello strato di ballast può portare a
considerevoli conseguenze e gravi ripercussioni sulla regolarità e la sicurezza dell’esercizio
ferroviario.
Il ballast si presenta allo stato vergine come un materiale sciolto, le cui caratteristiche di resistenza a
taglio sono, quindi, direttamente attribuibili allo scheletro solido. Inoltre questo aspetto spiega
efficacemente la prevalenza della componente di resistenza attritiva piuttosto che di quella coesiva.
La risposta alle sollecitazioni esterne è, difatti, attribuibile all’attrito che si viene a creare tra le
superfici di contatto dei singoli grani di pietrisco che costituiscono lo strato della massicciata.
La sollecitazione continua a cui la massicciata è sottoposta, dovuta principalmente alla circolazione
dei convogli che porta all’abrasione delle traverse e dei binari, data dall’attrito con le ruote degli
stessi, compromette le caratteristiche di resistenza meccanica e di permeabilità dello strato in
questione. Ciò perché queste attività ripetute provocano la risalita di materiale dagli strati più
profondi, così come anche la produzione di piccoli detriti o polveri derivanti dai grani stessi, i quali
si depositano nei vuoti presenti tra essi, alterando così la composizione granulometrica e la struttura
del ballast.
Il materiale fino, di cui sopra, andandosi a posizionare tra i singoli grani di pietrisco può generare
un’azione lubrificante, portando a uno scorrimento tra essi, il che comporta inevitabilmente la perdita
parziale delle proprietà e della funzione dello strato.
Inoltre, la diminuzione del volume dei vuoti tra i grani portata dalla frapposizione di materiale
inquinante, implica la perdita delle condizioni che determinano il regolare deflusso delle acque
meteoriche, le quali teoricamente dovrebbero percolare attraverso il piano di regolamento ferroviario.
Attraverso l’utilizzo di moderne tecnologie per l’analisi di fenomeni come il fouling ferroviario, si
rende quindi necessaria una costante osservazione e monitoraggio delle tratte in esercizio, al fine di
preservare le caratteristiche tecniche e il corretto funzionamento dell’infrastruttura, e quindi
dell’intero sistema ferroviario.
- 4 -
Una di queste tecnologie, utilizzate nell’ultimo ventennio per la valutazione granulometrica del
ballast ferroviario e, in tempi più recenti, anche per la quantificazione dei livelli di inquinamento
dello stesso strato, è il GPR - Ground Penetrating Radar.
Tale strumentazione occupa oggi un ruolo di fondamentale importanza nelle attività di diagnostica
della massicciata, e riveste primario interesse per i gestori delle infrastrutture, grazie ai molteplici
benefici che l’utilizzo di questa apparecchiatura comporta.
Il vantaggio primario è attribuibile alla capacità dello strumento di effettuare misure anche in
movimento, così da riuscire ad ottenere dati significativi in tempi non frammentati, e garantendo
contemporaneamente il regolare svolgimento dell’attività di circolazione ferroviaria.
In secondo luogo, la tecnologia non distruttiva che caratterizza il georadar si distanzia dalle
tradizionali procedure diagnostiche, le quali si basano sul tipico prelievo in situ di campioni (tecnica
del carotaggio) che, oltre ad intaccare l’integrità della massicciata, non consentono l’analisi sulla
totalità del tracciato ferroviario preso in esame, ma piuttosto forniscono le informazioni indagate solo
al livello puntuale.
Dai dati acquisiti dalla sperimentazione con la tecnologia GPR si sono realizzate elaborazioni tramite
il software MatLab. L’apprendimento del funzionamento e la capacità di utilizzo del suddetto
software sono da considerarsi la finalità dello svolgimento di questo tirocinio.
- 5 -
3. LA TECNOLOGIA GEORADAR GPR
Come già accennato, la tecnologia GPR è una tecnica di diagnosi non distruttiva che sfrutta la
propagazione di onde elettromagnetiche irradiate nel corpo oggetto di indagine, individuando perciò
in modo continuativo e a differenti profondità, la presenza di discontinuità dovute alla differente
conduttività dei materiali incontrati. Esso consente, infatti, di ottenere misure in tempi brevi e con
bassi costi di esecuzione, aspetto fondamentale se si considera la significativa estensione
longitudinale delle infrastrutture di trasporto.
Le analisi georadar sono in grado di restituire una mappa completa delle condizioni di degrado delle
infrastrutture permettendo di identificare le cause di tale degrado ed i sui processi di evoluzione con
conseguenze positive in termini di efficacia ed efficienza della pianificazione sugli interventi
manutentori.
Tradizionalmente il GPR è costituito da un set di antenne funzionanti a diverse frequenze, ciascuna
caratterizzata da:
• un’unità di generazione del segnale, con un generatore di onde elettromagnetiche che produce
impulsi ad una specifica potenza e frequenza,
• un sistema di antenne, costituito da un’antenna trasmittente, che trasmette gli impulsi nel
mezzo di indagine ed un’antenna ricevente, che capta il segnale riflesso,
• un’unità di acquisizione del segnale, in grado di convertire il segnale in forma analogica,
quindi campionarlo.
L’attività di indagine consiste nell’emissione nell’oggetto indagato, in questo caso la sovrastruttura
ferroviaria, di impulsi elettromagnetici ad una certa frequenza nota e nel calcolo del tempo
necessario al segnale per tornare al ricevitore, dopo essere stato riflesso da possibili discontinuità.
Queste si possono circoscrivere a materiali con differente costante dielettrica o differente
conducibilità elettrica.
La sperimentazione è basata sul fenomeno fisico dell’attenuazione, ossia della riduzione di ampiezza
dell’onda elettromagnetica in funzione della distanza percorsa nel mezzo, dovuta in genere alla
cessione di energia al mezzo di propagazione. L’attenuazione è inoltre proporzionale alla frequenza
di lavoro dell’antenna: maggiore è la frequenza maggiore sarà l’assorbimento del segnale emesso.
- 6 -
In funzione della profondità e dimensioni del corpo che, per mezzo del rilievo em, si vuole
investigare, occorre scegliere correttamente la frequenza, ossia la lunghezza d'onda che l'antenna
prescelta è in grado di generare.
Le diverse antenne possono operare a basse frequenze (100 – 600 MHz), garantendo una elevata
profondità di indagine ma con una bassa risoluzione, oppure alle alte frequenze (1600 – 2500 MHz),
le quali grazie alla minore lunghezza d’onda, permettono una migliore risoluzione, a discapito però
della capacità di penetrazione nel mezzo.
L'informazione base ottenuta dal georadar è una singola traccia definita A-Scan, e assemblando le
diverse tracce acquisite durante la prospezione, si ottiene un radargramma o B-Scan. In pratica con il
termine radargramma si indica una visualizzazione della sezione georadar acquisita e/o elaborata che
consente
l'interpretazione delle
caratteristiche delle
diverse “riflessioni”
sotto forma di
geometria e di intensità
del segnale ricevuto
Le antenne prese in
considerazione per
l’attività di tirocinio
sono di tipo Horn e di
tipo Vee, con frequenze
di 1.000 e 2.000 MHz
per le prime, e di 1500
MHz per la seconda.
- 7 -
4. ACQUISIZIONE DEI DATI GPR
Affinché l’indagine Georadar possa essere condotta, si rende necessario l’impiego di software per
l’acquisizione del segnale. Per un’antenna di tipo horn, ovvero non a contatto con la superficie
d’analisi, viene utilizzato un software sviluppato dall’azienda “I.D.S. Ingegneria Dei Sistemi SPA”,
chiamato K2 Fast Wave.
Figura 1: Interfaccia grafica dei software K2 Fast Wave e GRED/S
La possibilità di impostare l’area di lavoro, di effettuare la calibrazione del segnale e di acquisire il
segnale, ovvero il dato, è correlata all’utilizzo in maniera opportuna di tale software.
Nella fase preliminare di preparazione dello strumento, i parametri base che caratterizzano K2 Fast
Wave sono:
• Time Window, intervallo di tempo espresso in nanosecondi (ns), in cui l’antenna
registra l’energia delle onde elettromagnetiche riflesse. Normalmente tale intervallo è
quello che va da qualche attimo prima dell’emissione dell’impulso radar nel mezzo,
alla ricezione di tutte le riflessioni che possono essere di un certo interesse. Se il
mezzo e la profondità di indagine sono noti, la time window può essere stimata. Al
contrario si calcola un tempo tale da ricevere riflessioni da una profondità superiore a
quella interessata dall’indagine.
- 8 -
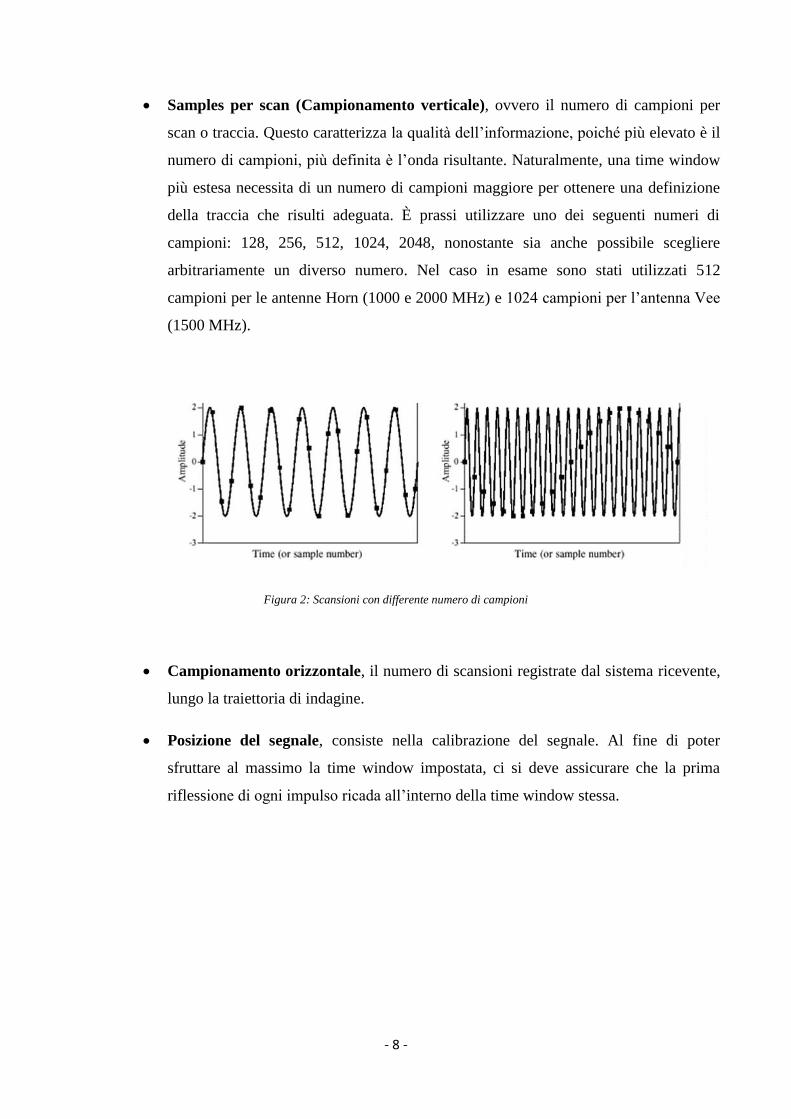
• Samples per scan (Campionamento verticale), ovvero il numero di campioni per
scan o traccia. Questo caratterizza la qualità dell’informazione, poiché più elevato è il
numero di campioni, più definita è l’onda risultante. Naturalmente, una time window
più estesa necessita di un numero di campioni maggiore per ottenere una definizione
della traccia che risulti adeguata. È prassi utilizzare uno dei seguenti numeri di
campioni: 128, 256, 512, 1024, 2048, nonostante sia anche possibile scegliere
arbitrariamente un diverso numero. Nel caso in esame sono stati utilizzati 512
campioni per le antenne Horn (1000 e 2000 MHz) e 1024 campioni per l’antenna Vee
(1500 MHz).
Figura 2: Scansioni con differente numero di campioni
• Campionamento orizzontale, il numero di scansioni registrate dal sistema ricevente,
lungo la traiettoria di indagine.
• Posizione del segnale, consiste nella calibrazione del segnale. Al fine di poter
sfruttare al massimo la time window impostata, ci si deve assicurare che la prima
riflessione di ogni impulso ricada all’interno della time window stessa.
- 9 -
5. VISUALIZZAZIONE DEL SEGNALE GPR
Una volta effettuata la scansione, K2 Fast Wave fornisce i dati tramite file la cui estensione è “.dt”.
Per aprirli si deve fare ricorso ad un altro software, GRED HD Basic, anch’esso sviluppato da I.D.S.
Tale software consente di visualizzare in 2D i radargrammi ottenuti dalle prove con GPR,
consentendo sia la scelta della tipologia di grafico da impostare, sia di riconoscere più facilmente
eventuali stratificazioni presenti nelle mappe ottenute.
Per ottenere l’interfaccia grafica con cui visualizzare il segnale è necessario aprire i file .dt
selezionando il comando Average Trace.
Una volta ottenuto il grafico sarà quindi possibile cambiare la scala degli assi, effettuare zoom su
singole sezioni del segnale e salvare l’immagine in differenti estensioni.
Figura 3: Interfaccia grafica del segnale attraverso GRED HD Basic
Il software, attraverso la funzione View → Header consente di prendere visione dei parametri
descritti precedentemente nella fase di acquisizione del segnale.
- 10 -
6. MATLAB – MATRIX LABORATORY
MatLab (abbreviazione di MATrix LABoratory) è un ambiente virtuale per l’analisi statistica creato
negli anni ’70 da Ceye Moler, presidente del dipartimento di scienze informatiche dell’Università del
Nuovo Messico. È un ambiente di sviluppo, scritto in linguaggio C, che integra il calcolo
matematico, la grafica e la programmazion, oggi diffusamente impiegato in diverse discipline
scientifiche: consente di manipolare matrici, visualizzare funzioni e dati, implementare algoritmi,
creare interfacce utente, modelli e applicazioni, e interfacciarsi con altri programmi. È un software
molto noto in diversi settori grazie alla sua grande portabilità, alla semplicità d’uso e alle potenzialità
di calcolo.
MatLab è anche un linguaggio di programmazione di alto livello, giacché in esso si evidenziano 15
diversi tipi di variabili, ovvero un insieme di dati modificabili situati in una porzione di memoria
(una o più locazioni di memoria) destinata a contenere dei dati, suscettibili di modifica nel corso
dell’esecuzione di un programma.
Nel linguaggio MatLab, i dati sono espressi tutti secondo la medesima forma ovvero l’array: si può
immaginare un array come una sorta di vettore, le cui caselle sono dette celle (o elementi) dell’array
stesso. Ciascuna delle celle si comporta come una variabile tradizionale: tutte le celle sono variabili
di uno stesso tipo preesistente, detto “tipo base dell’array”. Si parla perciò di tipi come numeric
array, character array, cell array etc. . Quello che si ottiene dichiarandolo è dunque un contenitore
statico ed omogeneo di valori e variabili.
- 11 -
Nel linguaggio MatLab si possono quindi evidenziare:
• Array scalari, di due dimensioni, formati da una riga e da una colonna;
• Array vettori, di due dimensioni, formati o da una riga (vettore riga) o da una
colonna (vettore colonna);
• Array matrici, di due dimensioni, formati da almeno due righe e da due colonne.
Come operatori MatLab utilizza tre diverse categorie di questo tipo di linguaggio:
• Gli operatori aritmetici: +, -, ·, /;
• Gli operatori relazionali: >, <, >=, <=, ==, ~=;
• Gli operatoti logici o booleani: ~ not, end &, or | .
L’interfaccia grafica di MatLab si può riassumere in diverse sezioni:
• Barra dei menù, attraverso la quale accedere a tutte le funzioni di MatLab;
• Barra degli strumenti, attraverso cui è possibile accedere rapidamente alle funzioni
principali maggiormente impiegate;
• Command Window, in cui si digitano i comandi, script o funzioni supportate, e in
cui è possibile visualizzarne in tempo reale i risultati. Se vengono creati più comandi
nella stessa linea, è necessario distinguerli con una virgola. Se un comando è
terminato con un punto e virgola, i risultati ottenuti non verranno visualizzati
immediatamente nella Command Window, ma verranno solo salvati nel Workspace;
• Command History, contenuta all’interno della Command Window, in cui vengono
memorizzate le istruzioni già digitate ed eseguite in precedenza, divise per ora e data.
Ciò consente di lanciare un comando in Command Window semplicemente con un
doppio click sul comando all’interno della Command History;
• Workspace è lo spazio di memoria in cui è possibile visualizzare le variabili
dichiarate o calcolate. Questa sezione elenca tutte le variabili già create e dà la
possibilità di inserirne di nuove o di importarne dall’esterno;
- 12 -
• Editor è la finestra in cui si crea lo script, ovvero il comando da eseguire;
• Current Folder indica l’indirizzo di memoria in cui si sta lavorando e permette di
esplorare i file presenti sulla propria memoria e di aprirli direttamente nel programma.
Figura 4: Interfaccia grafica dell’ambiente di sviluppo MatLab
- 13 -
7. IL SEGNALE GPR IN AMBIENTE MATLAB
Lo studio del segnale ottenuto si sviluppa in MatLab attraverso una serie di operazioni che nel
complesso costituiscono quello che viene definito Processing. Esso si articola in:
• Apertura e lettura dei dati radar
• Rappresentazione grafica dei dati della matrice
• Normalizzazione del segnale
• Taglio del segnale
• Realizzazione di un codice di filtraggio
• Calcolo della costante dielettrica relativa
• Rappresentazione grafica post-processing
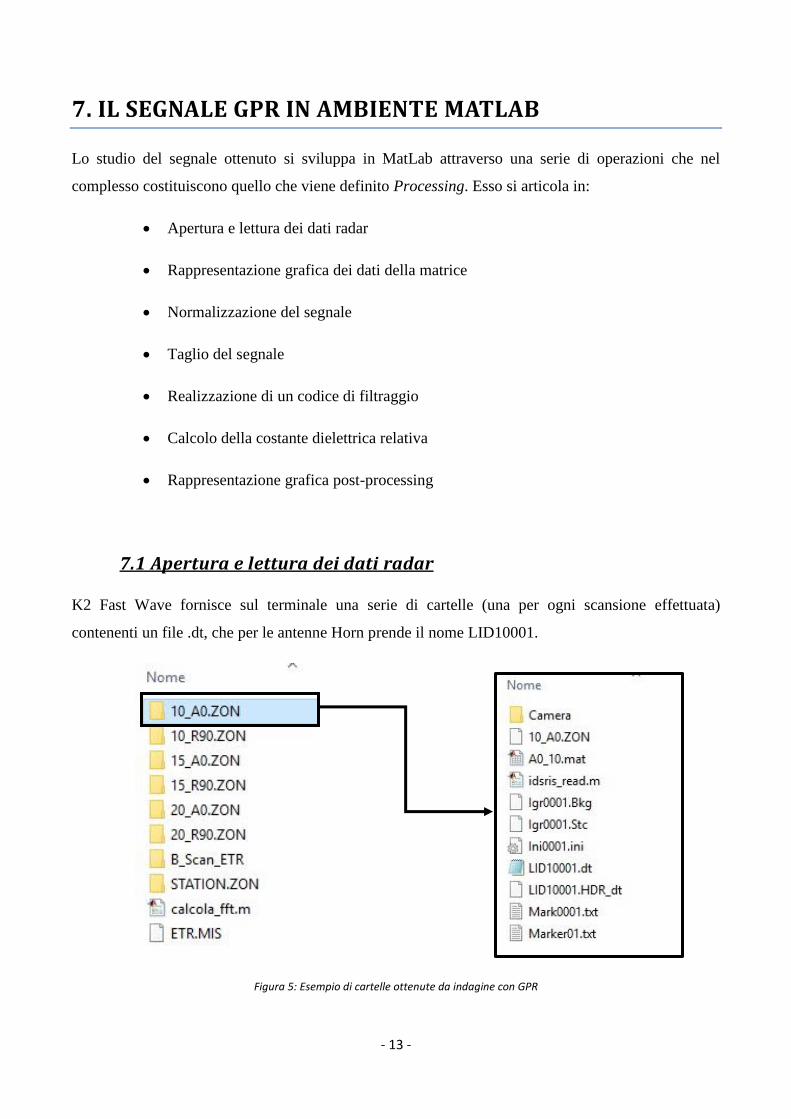
7.1 Apertura e lettura dei dati radar
K2 Fast Wave fornisce sul terminale una serie di cartelle (una per ogni scansione effettuata)
contenenti un file .dt, che per le antenne Horn prende il nome LID10001.
Figura 5: Esempio di cartelle ottenute da indagine con GPR
- 14 -
È possibile quindi la lettura di suddetti file in ambiente MatLab attraverso uno script, o codice,
inserito nella finestra Editor, che consente di cambiare estensione al file, passando da .dt a .MAT,
rendendo così il file compatibile con il programma. Tale codice è fornito da I.D.S. ed è denominato
“idsris_read.m”.
L’apertura dei file LID10001 fornisce una structure array, che equivale ad un file strutturato in più
variabili, attraverso il quale è possibile consultare i dati acquisiti durante la scansione con GPR e i
parametri impostati in fase di acquisizione, come la Time Window (denominata “sweep_time”) e la
matrice che costituisce il segnale nel dominio del tempo (MAPPA). In questo studio le varie matrici
presentano un numero di righe pari a 512 e 1024 (a seconda del tipo di antenna utilizzata), e un
numero di colonne variabile in funzione della lunghezza della tratta di ferrovia analizzata. Il numero
di righe corrisponde al campionamento verticale, quello di colonne al campionamento orizzontale.
Figura 6: Esempio del contenuto di una structure array
- 15 -
La matrice che costituisce il segnale nel dominio del tempo e che contiene le informazioni più
importanti derivanti dall’indagine, ovvero la variabile MAPPA, al fine di poter essere analizzata deve
essere estratta dal file strutturato succitato: ciò è reso possibile tramite un codice inserito nella
finestra Editor. Nel rispetto della sintassi e della semantica del linguaggio, il codice è caratterizzato