Page 1
Università degli Studi della Basilicata
SCUOLA DI INGEGNERIA
CORSO DI LAUREA IN INGEGNERIA
MECCANICA
Tesi di Laurea in
Macchine e Sistemi Energetici
DESIGN OF A CENTRIFUGAL PUMP FOR AN
EXPANDER CYCLE ROCKET ENGINE
Relatore:
Prof. Ing. Aldo BONFIGLIOLI
Correlatore:
Ing. Angelo LETO
Laureando:
Antonio CANTIANI
Matricola: 41036
ANNO ACCADEMICO 2014/2015
Page 3
List of contents Chapter 1
1.1 Definitions and fundamentals (2) .................................................................................... 1
1.1.2 Thrust ............................................................................................................................ 2
1.2 Liquid-fuel rocket engines cycles ........................................................................................ 3
1.3 Expander cycle engines ........................................................................................................ 5
1.3.1 Closed expander cycle ................................................................................................... 6
1.3.2 Closed split expander cycle (5) (6) ................................................................................ 8
1.3.3 Closed dual expander cycle ........................................................................................... 8
1.3.4 Open expander cycle ..................................................................................................... 9
1.4 Existing expander cycle systems ........................................................................................ 10
1.4.1 The RL10 engine .................................................................................................... 10
1.4.2 The LE-5 engine .................................................................................................... 12
1.4.3 Vinci ............................................................................................................................ 13
1.5 Liquid propellants .............................................................................................................. 15
1.4.3 Liquid oxygen ........................................................................................................ 18
1.4.4 Liquid hydrogen ..................................................................................................... 19
1.4.5 Methane .................................................................................................................. 19
Chapter 2
2.1 Introduction ........................................................................................................................ 21
2.2 Pump description ................................................................................................................ 23
2.3 Cavitation ........................................................................................................................... 25
2.4 Pump parameters ................................................................................................................ 27
2.5 Pump design methods......................................................................................................... 40
2.5.1 Method 1 ..................................................................................................................... 40
2.5.2 Method 2 ..................................................................................................................... 41
Page 4
2.5.3 Method 3 ..................................................................................................................... 42
2.6 Volute design ...................................................................................................................... 43
2.6.1 Effect of the volute design on efficiency .................................................................... 44
2.6.2 Volute geometry esteem .............................................................................................. 46
Chapter 3
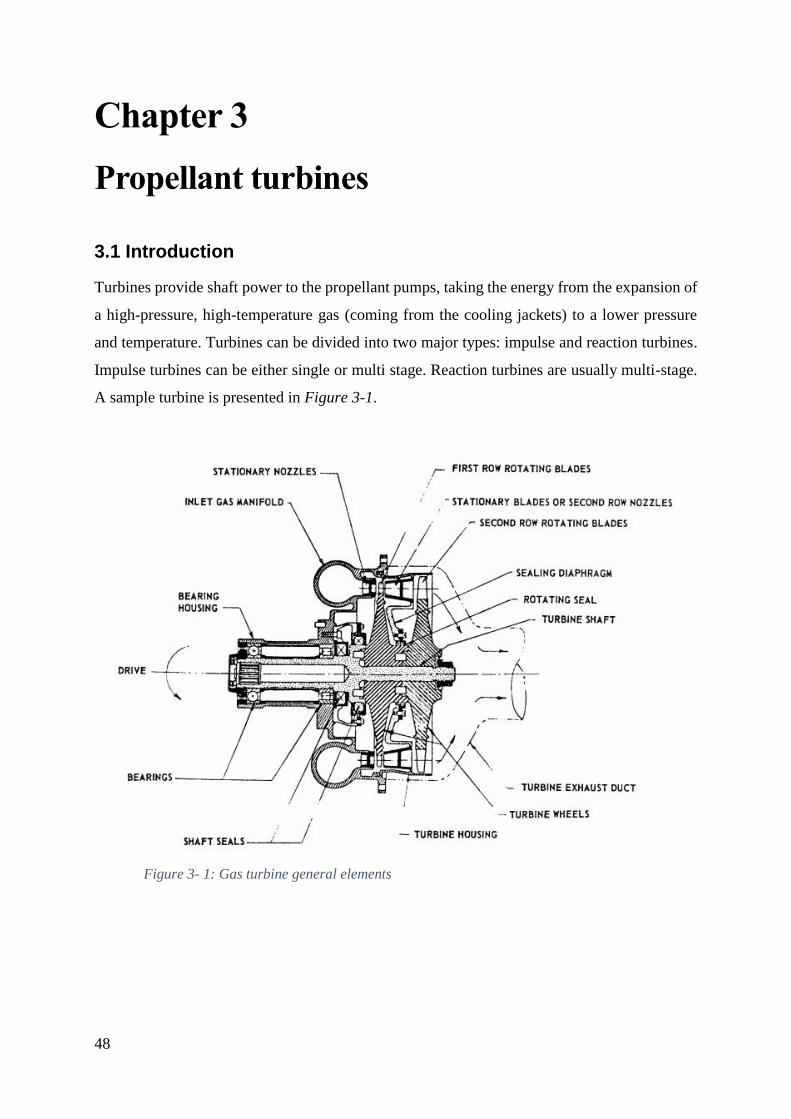
3.1 Introduction ........................................................................................................................ 48
3.2 Impulse turbines ................................................................................................................. 49
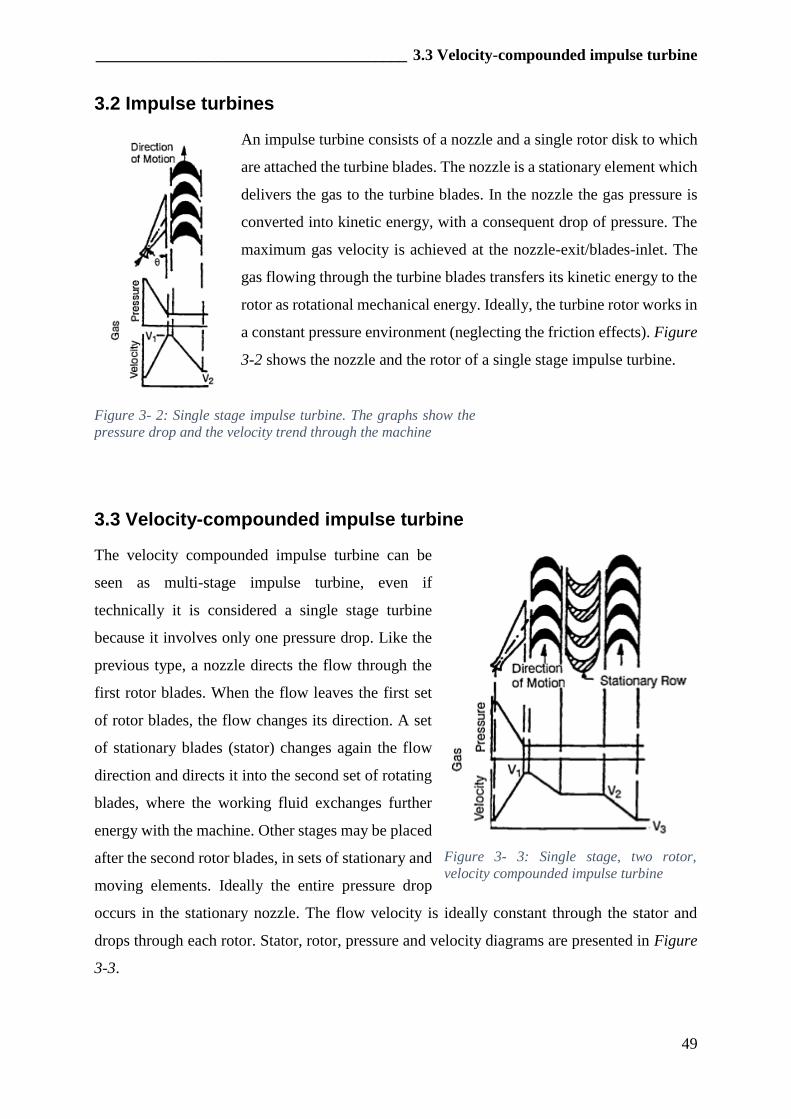
3.3 Velocity-compounded impulse turbine .............................................................................. 49
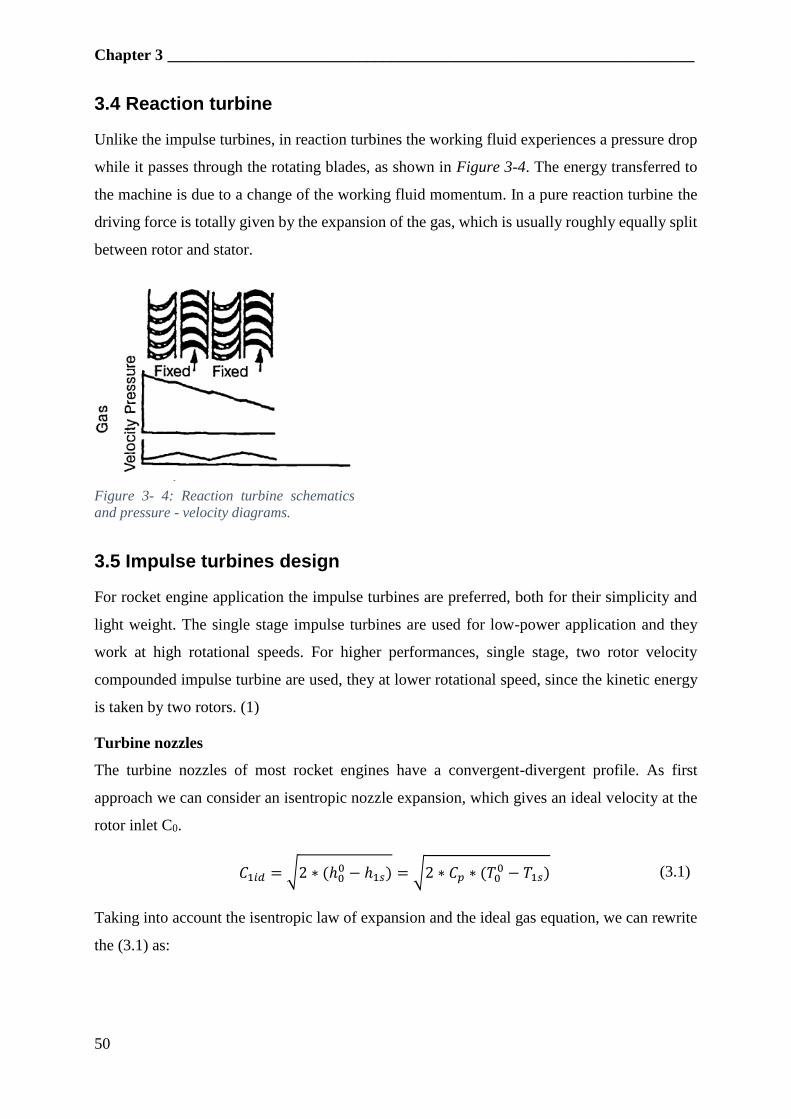
3.4 Reaction turbine ................................................................................................................. 50
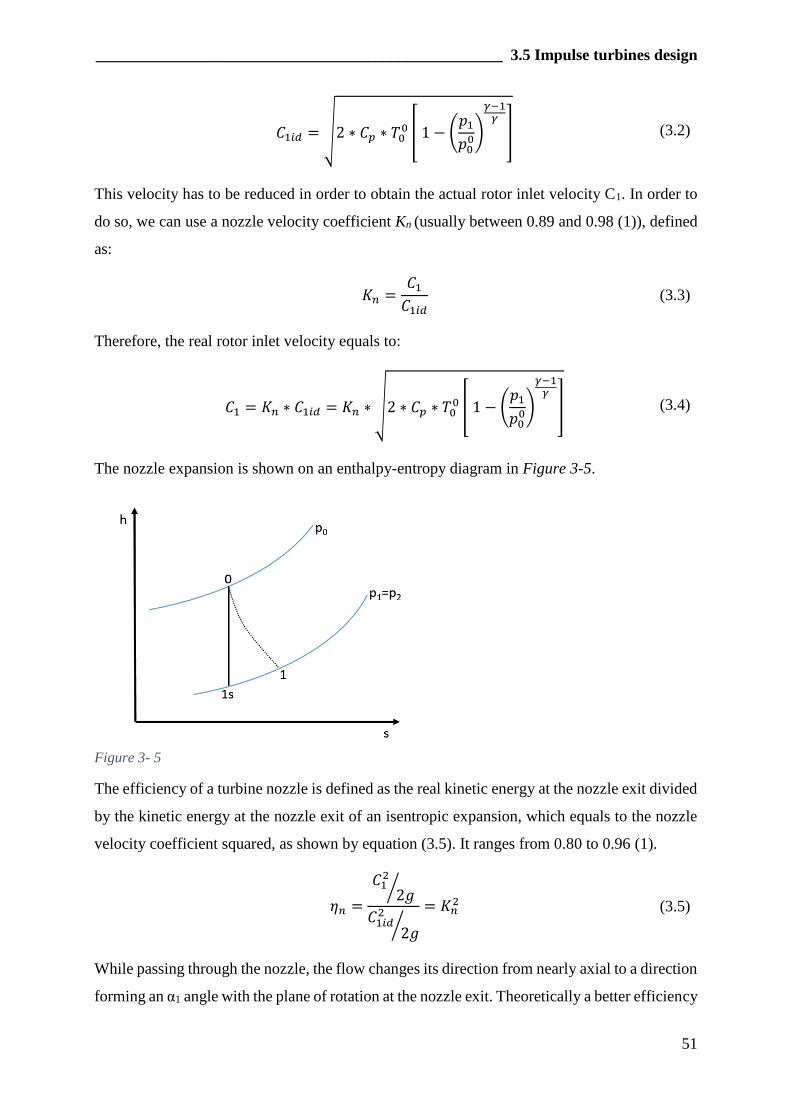
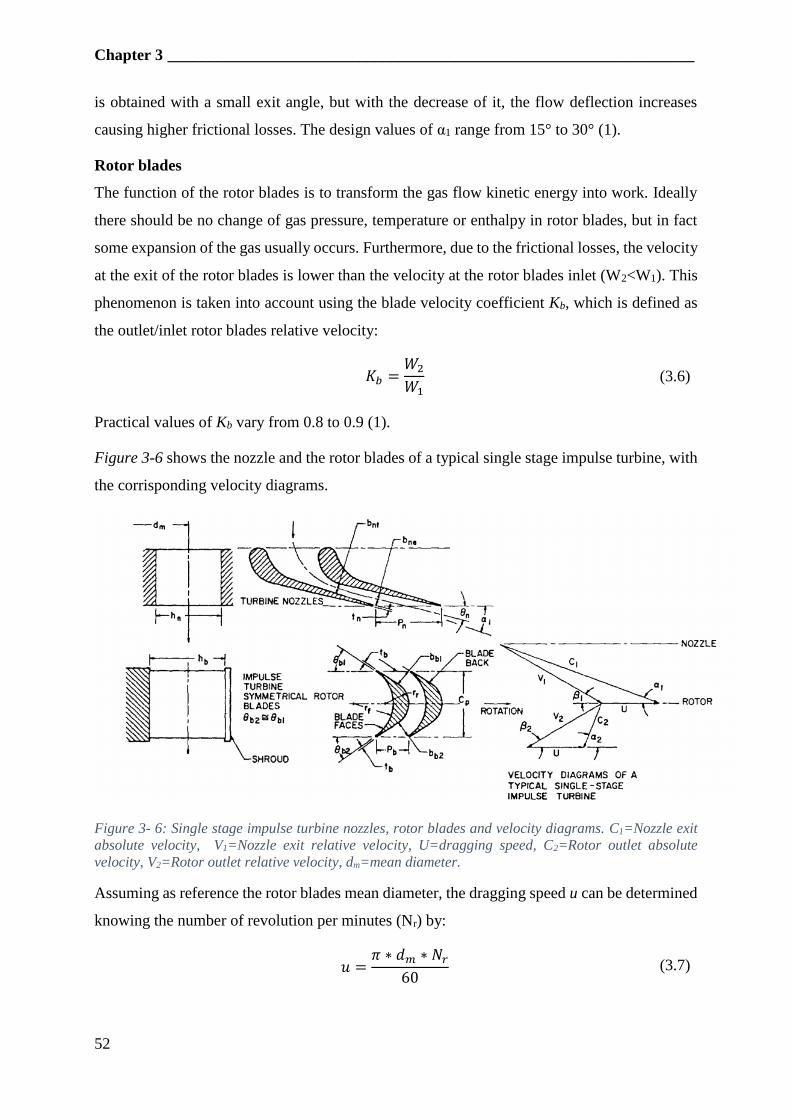
3.5 Impulse turbines design ...................................................................................................... 50
Chapter 4
4.1 Introduction ........................................................................................................................ 55
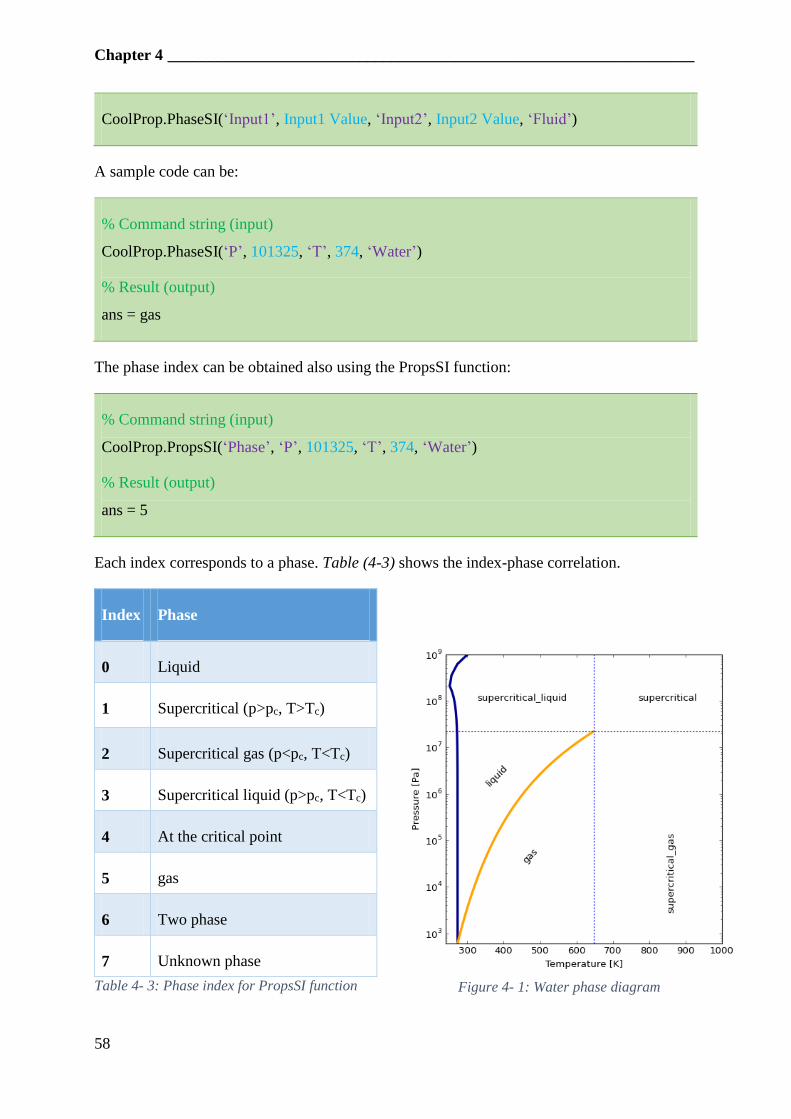
4.2 CoolProp libraries .............................................................................................................. 55
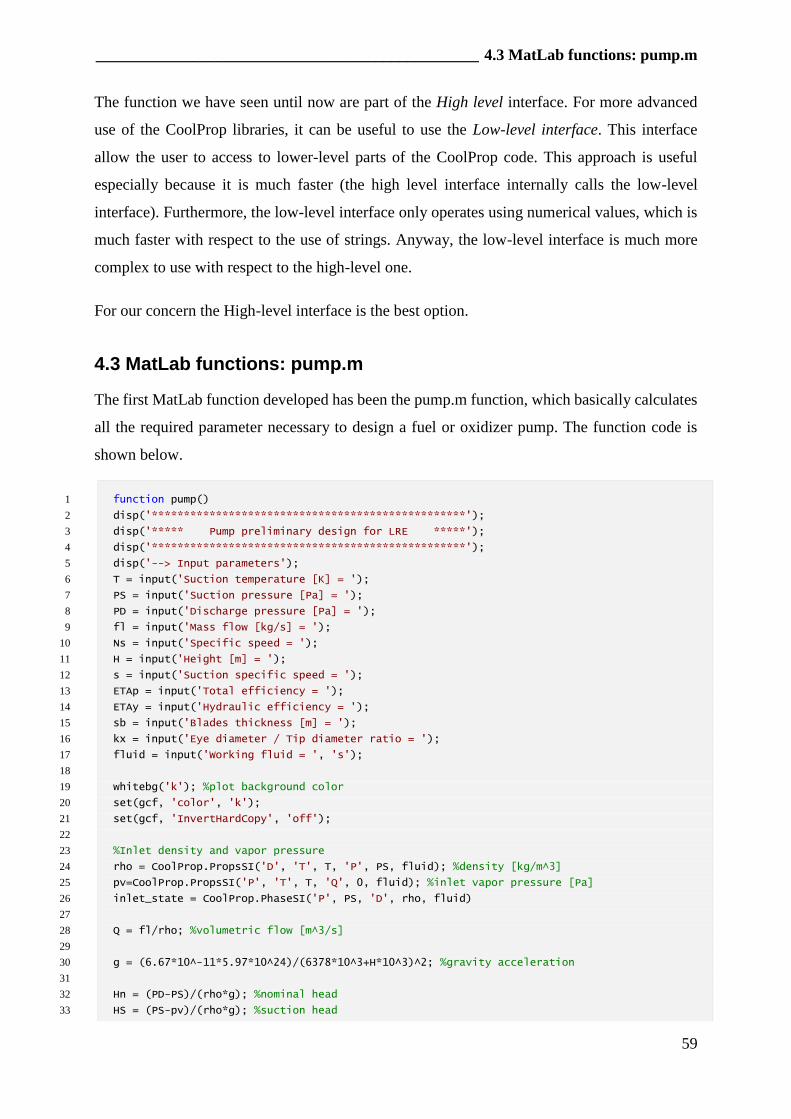
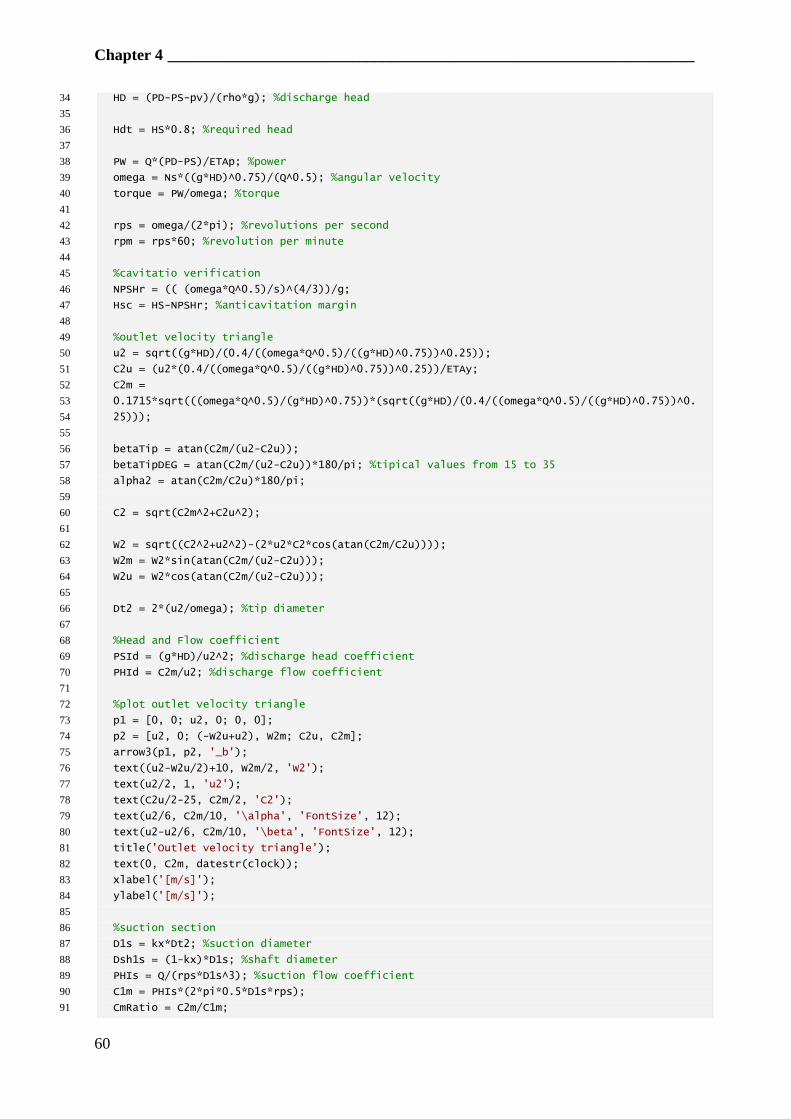
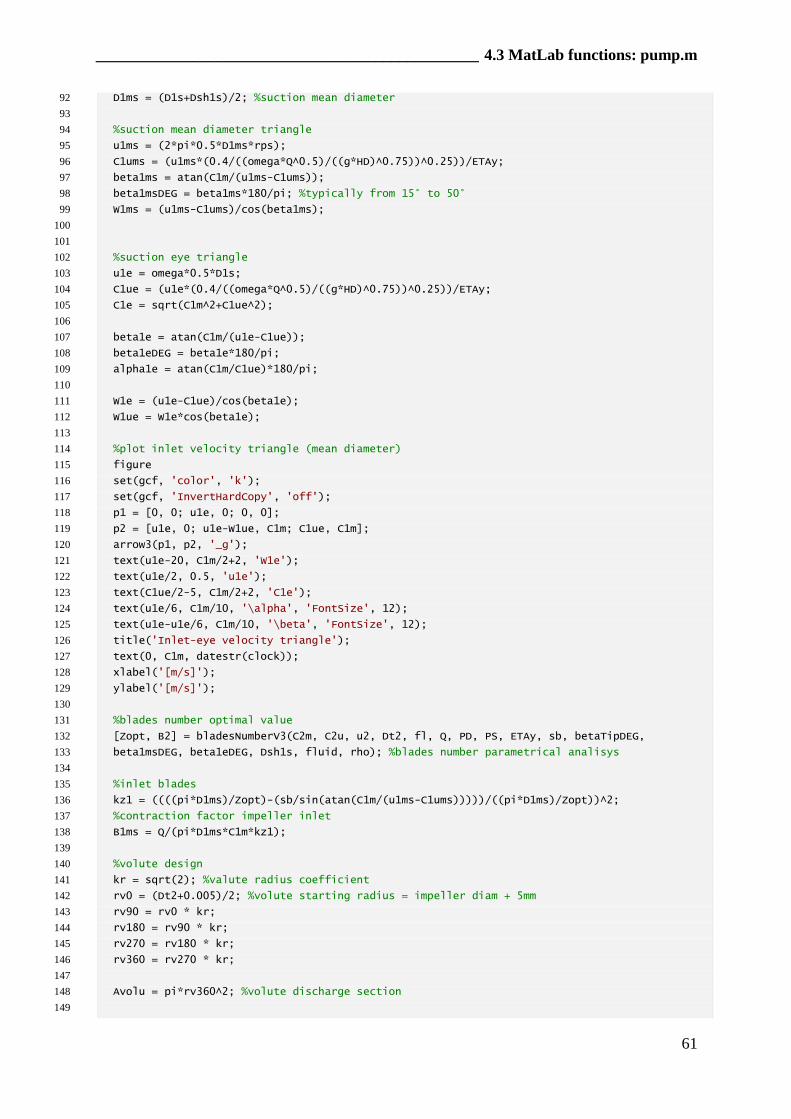
4.3 MatLab functions: pump.m ................................................................................................ 59
4.4 MatLab functions: bladesNumber.m .................................................................................. 66
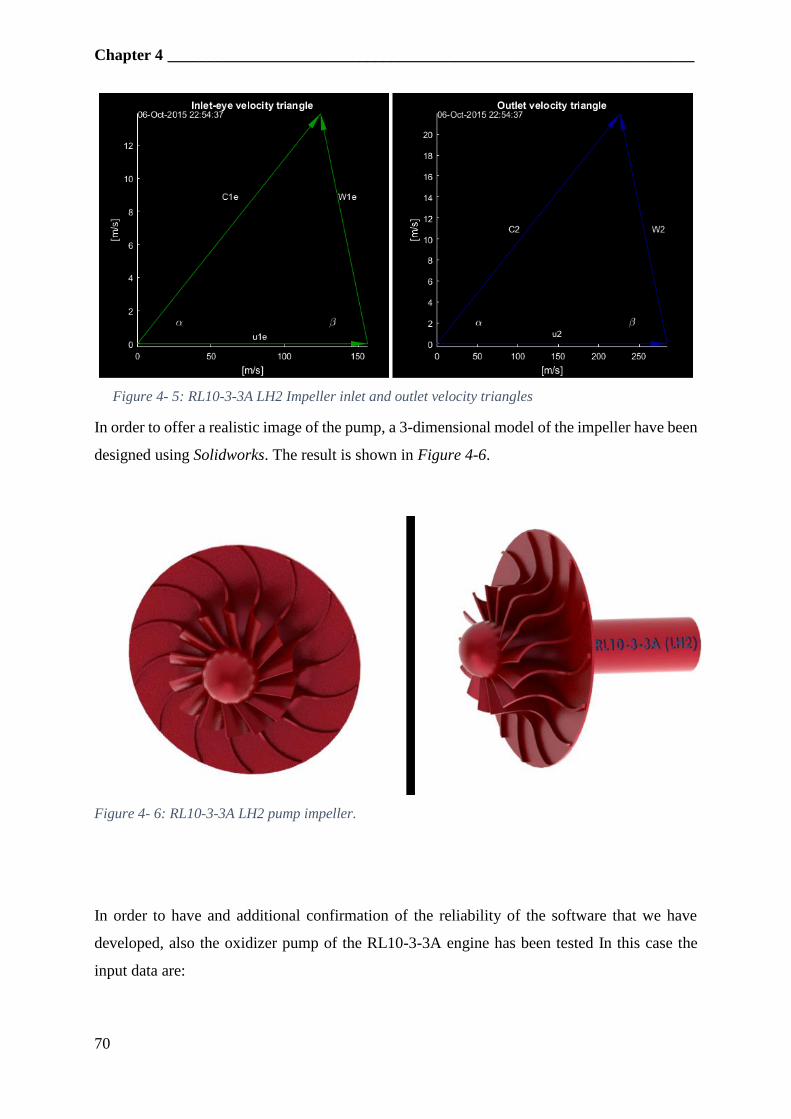
4.5 Software test-case ............................................................................................................... 68
Chapter 5
5.1 Turbopump specifics and applications ............................................................................... 73
5.2 Conclusions ........................................................................................................................ 76
Appendix
Appendix A – MatLab additional functions ............................................................................. 77
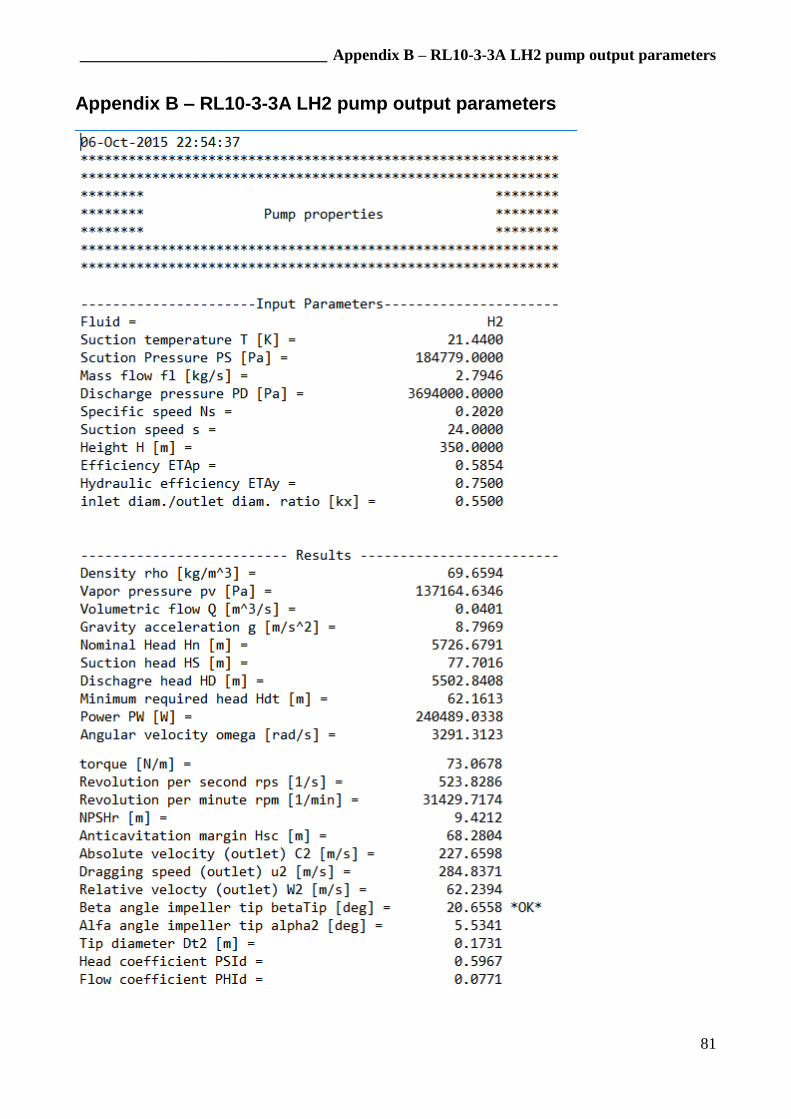
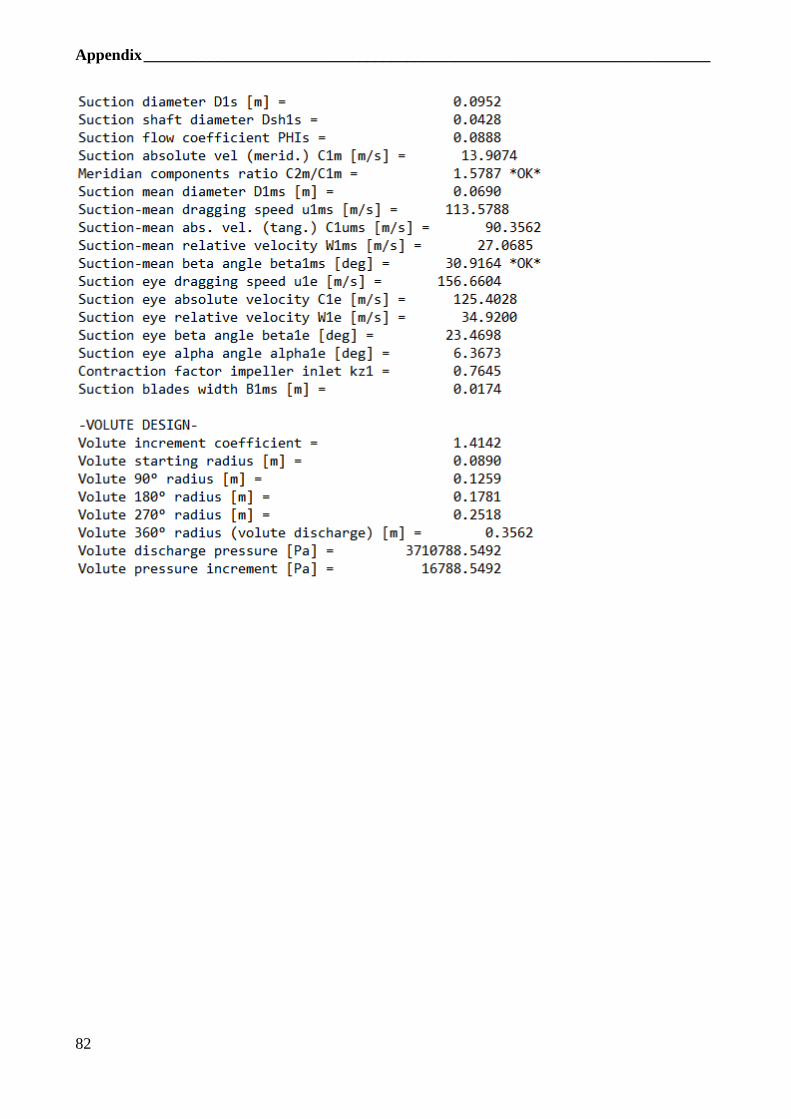
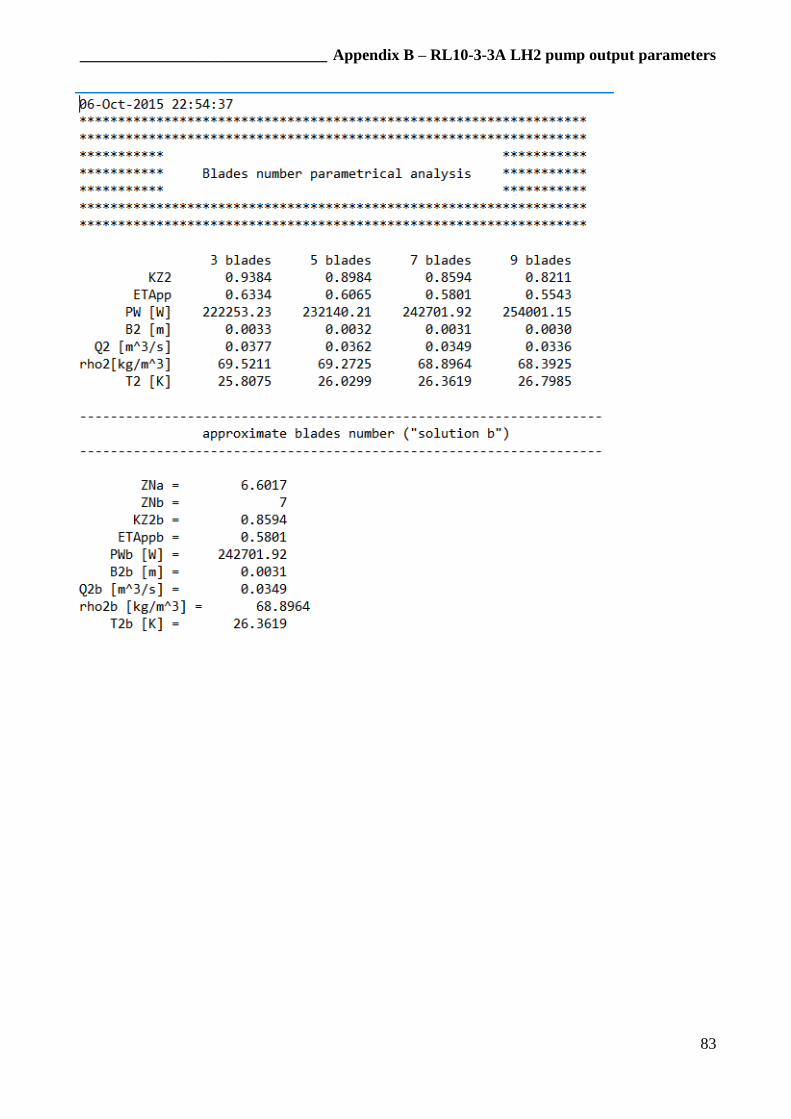
Appendix B – RL10-3-3A LH2 pump output parameters........................................................ 81
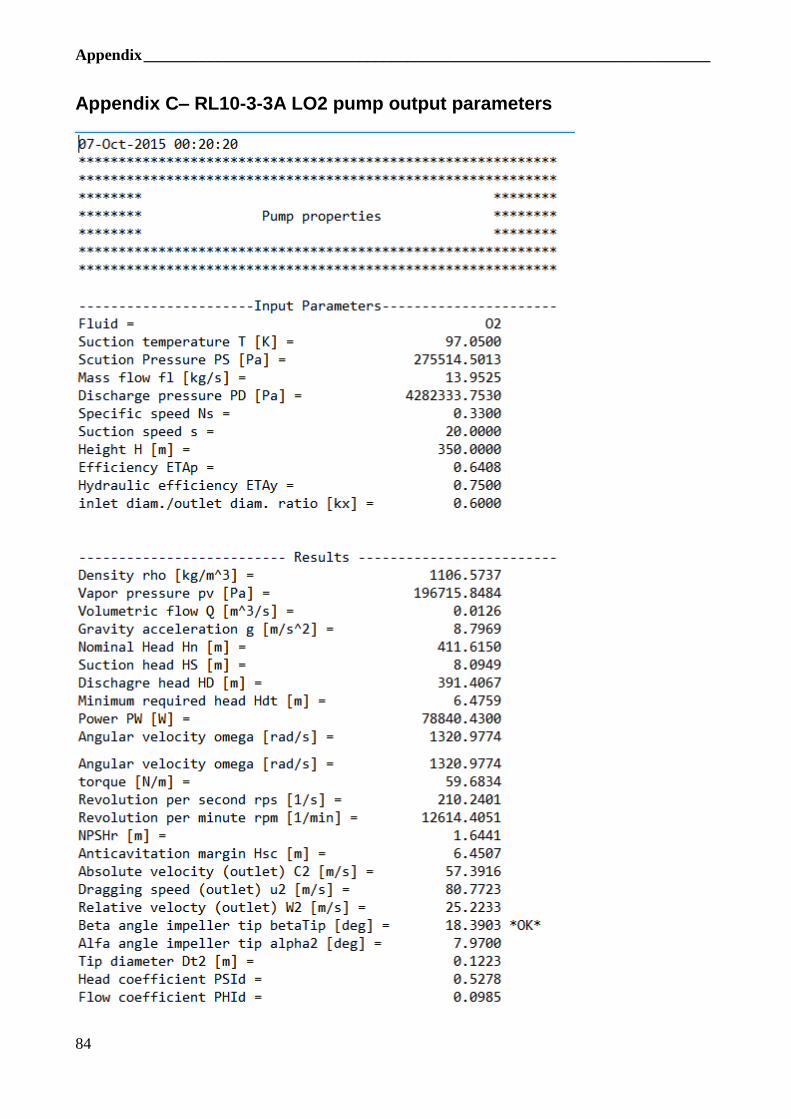
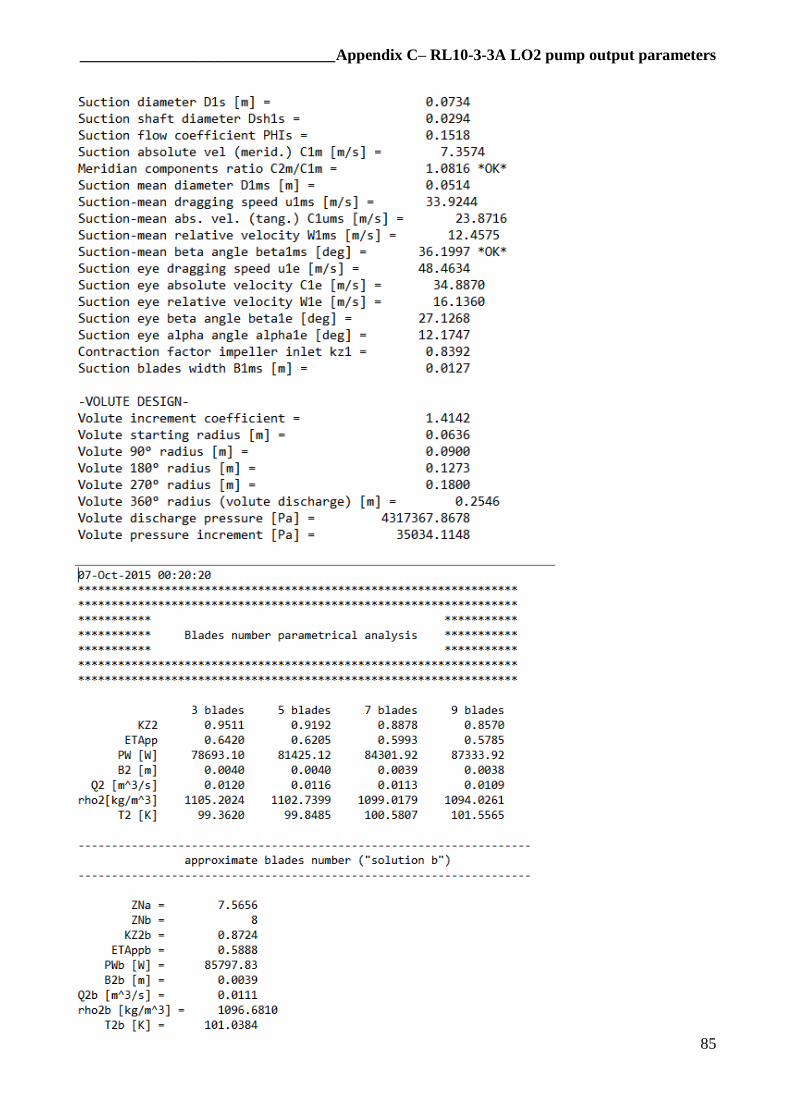
Appendix C– RL10-3-3A LO2 pump output parameters......................................................... 84
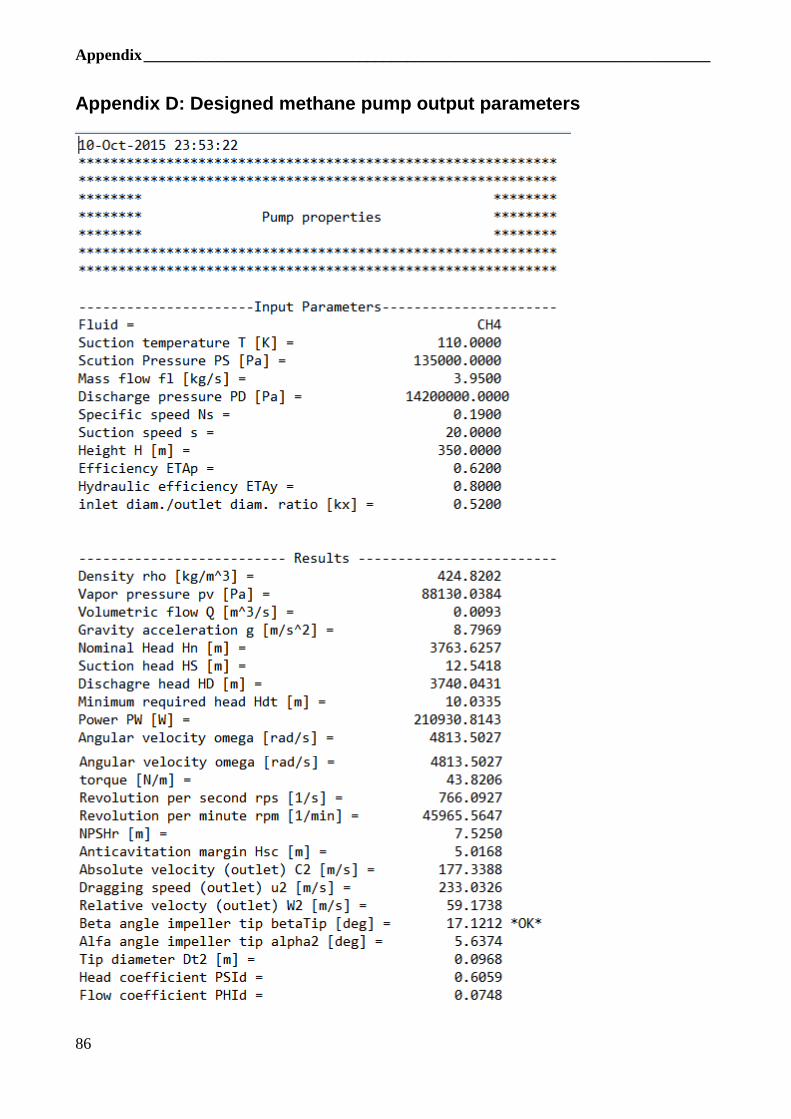
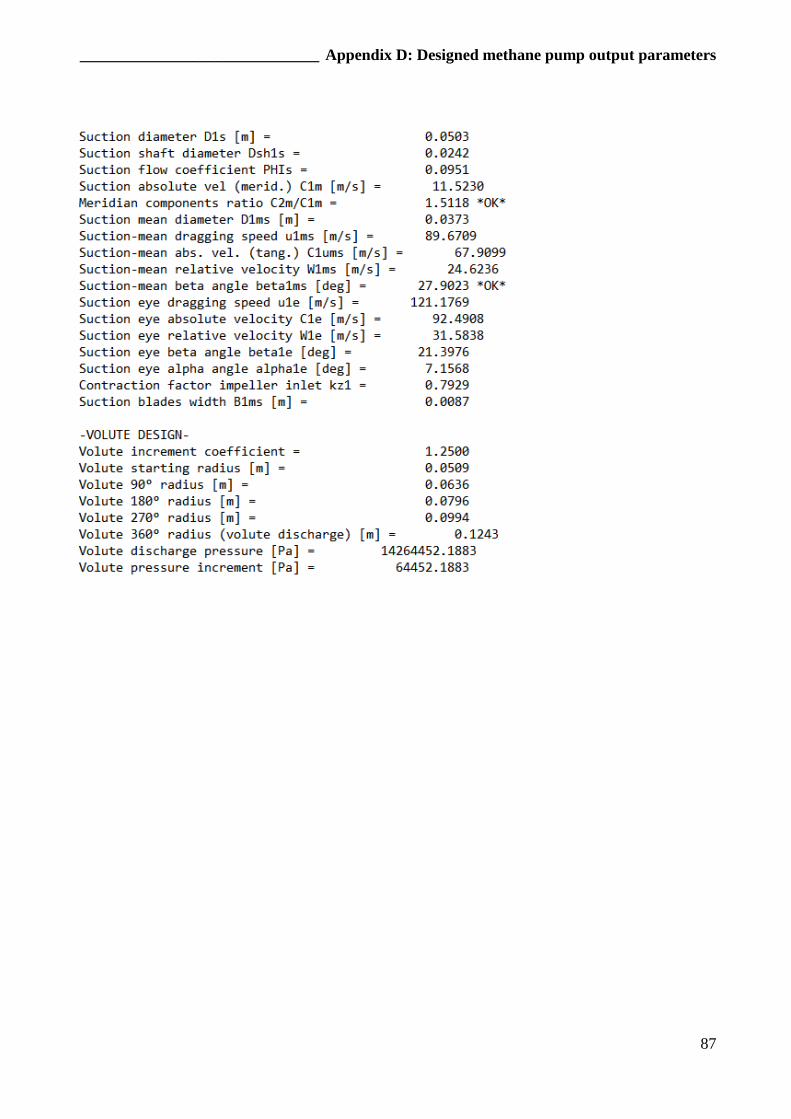
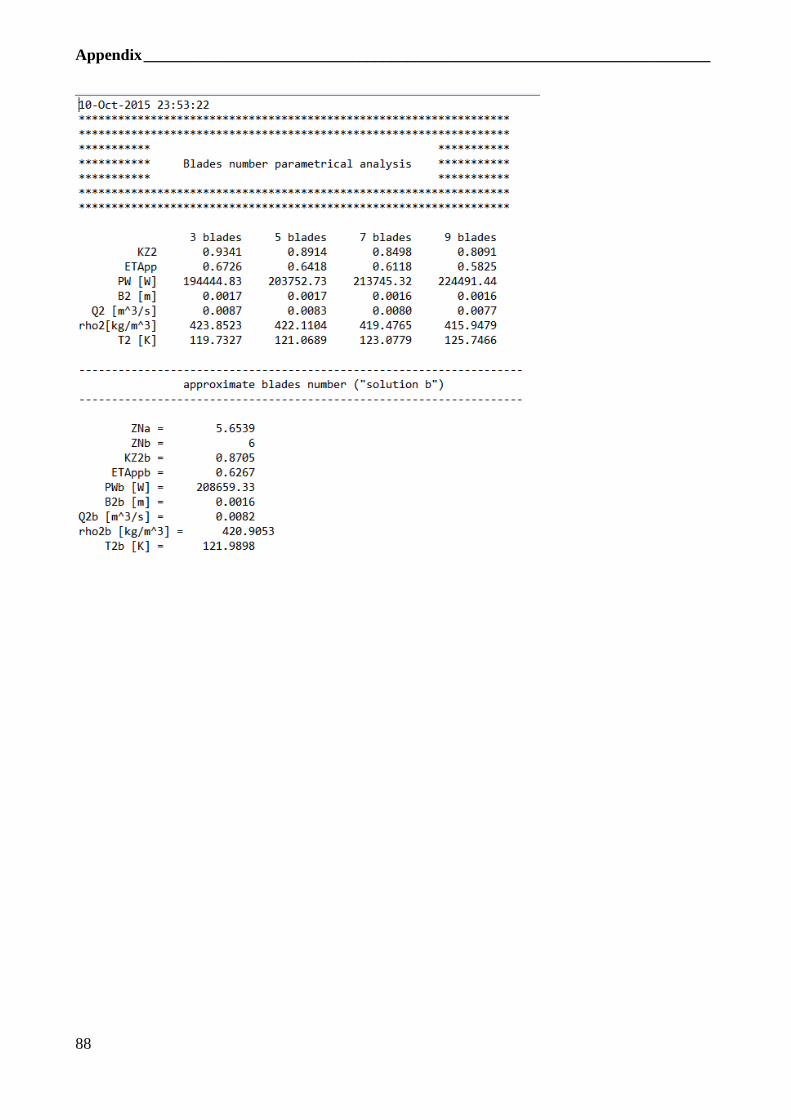
Appendix D: Designed methane pump output parameters ....................................................... 86
Page 5
Introduction
The present work is aimed at designing a centrifugal pump for an expander cycle engine fed
system. In particular, the pump has been designed to work with liquid methane. The choice of
this type of cryogenic working fluid has been driven by the characteristic required by a rocket
propulsion system: the methane has a lower cost and a higher density with respect to the more
commonly used hydrogen. The lower cost is obviously a very appreciated feature; in addition
to this, the higher density allows the design of more compact stages, which reduces the total
weigh and the aerodynamic drag.
The design phase led to the development of a software in MatLab environment. This software
aims to be a tool capable of providing a preliminary design of a generic centrifugal pump, given
certain input data. The CoolProp libraries have played a key role in the software development.
These libraries are an open source tool that, once implemented in MatLab, enabled to easily
determine the thermodynamic variables required for the software calculations.
The developed software passed through a validation process, in which we have performed
various design simulation based on the known data of the hydrogen and oxygen pump of a
RL10A-3-3A; the results have shown an acceptable error margin.
Later, we moved to the design of the methane pump. It has been design with input data that
should provide comparable performances to those of the methane pump developed by the Italian
company AVIO for the LM10-Mira engine, which is currently under development in
collaboration with the Russian KBKhA.
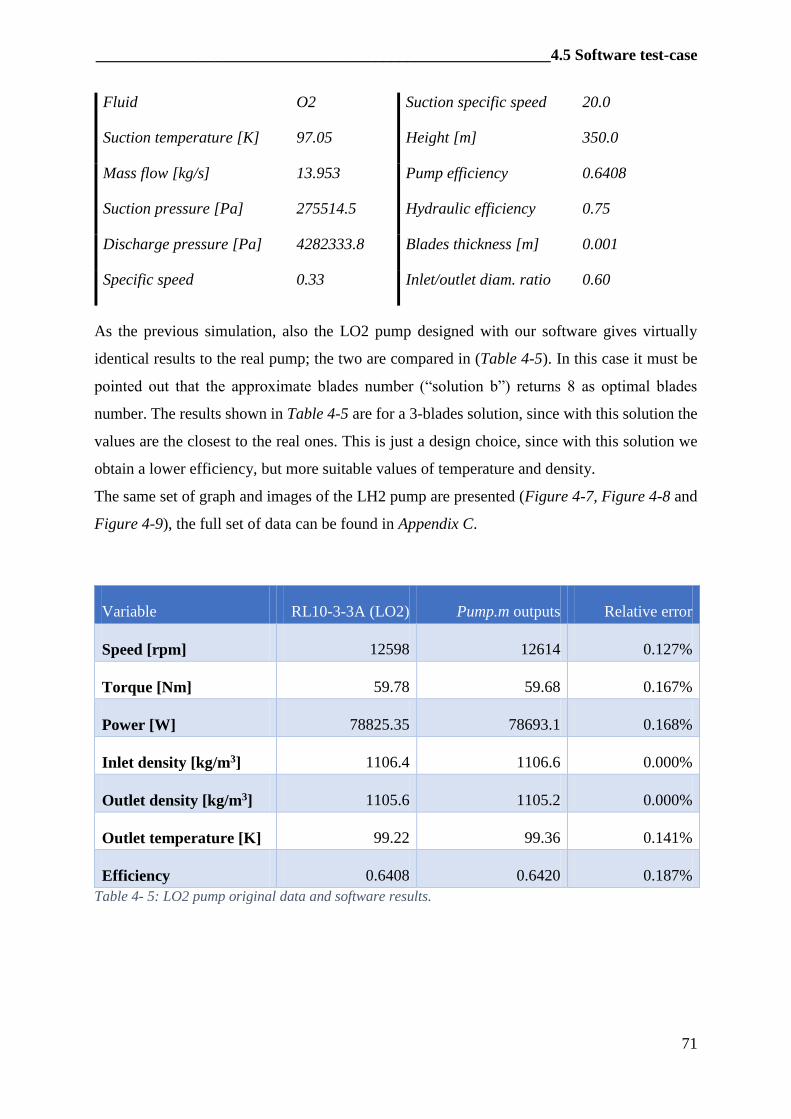
In addition to the various graph of the velocity triangles and 2-Dimensional models of the
impeller, a 3-Dimensional model of the pump has been developed through the use of
SolidWorks
Page 7
1
Chapter 1
Liquid-fuel rocket engines
Since the beginning of the “rocket era” liquid-fuel engines have been the most widely used
rocket engines. They passed through a long improvement process, which has led to engines that
develop higher thrust, weigh less and are more reliable. The main goal of interest is to increase
the payload, cost reduction, reliability improvement and design reusable launch vehicles (1).
1.1 Definitions and fundamentals (2)
The function of rockets engines is to convert the chemical energy provided by the propellant
into thrust, through the combustion process.
The total impulse It is defined as the thrust force F (which may be time dependent) integrated
over the burning time t, as shown by equation (1.1).
𝐼𝑡 = ∫ 𝐹(𝑡)𝑡
0
𝑑𝑡 (1.1)
The total impulse is proportional to the energy released by the propellant.
For constant thrust force and negligible start and stop transients, equation (1.1) reduces to:
𝐼𝑡 = 𝐹 𝑡 (1.2)
The specific impulse Isp is the total impulse per unit of weight flow rate of propellant. It is an
important parameter that describes the performances of the rocket propulsion system. If we
denote by 𝑔0 the acceleration of gravity at sea-level and by �� the mass flow rate of propellant,
then equation (1.3) returns the specific impulse.
𝐼𝑠𝑝 =∫ 𝐹
𝑡
0𝑑𝑡
𝑔0 ∫ �� 𝑑𝑡𝑡
0
(1.3)
This expression gives a time-averaged specific impulse value. For constant thrust and propellant
flow, the equation (1.3) can be simplified as follows:
𝐼𝑠𝑝 =𝐼𝑡
𝑚𝑝 𝑔0 (1.4)
where 𝑚𝑝 is the total effective propellant mass.
Page 8
Chapter 1 __________________________________________________________________
2
In the SI system Isp is expressed in seconds, however it does not represent a measure of elapsed
time.
The exhaust velocity in the rocket nozzle is not uniform over the entire cross-section. Since the
velocity profile is difficult to measure accurately, a uniform axial velocity c is assumed, which
allows a one-dimensional description of the problem. This effective exhaust velocity c is the
equivalent velocity at which the propellants should be ejected from the vehicle to achieve the
engine specific impulse. It is defined as
𝑐 = 𝐼𝑠𝑝𝑔0 =𝐹
�� (1.5)
It the SI system, the effective exhaust velocity is expressed in meters per seconds. Since the
effective exhaust velocity c and the specific impulse 𝐼𝑠𝑝 only differ by an arbitrary constant 𝑔0,
either one or the other can be used to measure the rocket performances.
The mass ratio MR of a vehicle or a particular vehicle stage is defined as the final mass mf
(after the rocket has consumed all usable propellant) divided by the initial mass m0:
𝑀𝑅 =𝑚𝑓
𝑚0 (1.6)
1.1.2 Thrust
The thrust is the force produced by a rocket propulsion system acting upon a vehicle. In a
simplified way, it is the reaction experienced by its structure due to the ejection of mass at high
velocity. This phenomenon is a consequence of the law of conservation of linear momentum:
the high-pressure gases generated by the combustion of the propellant are accelerated by the
nozzle and ejected at high velocity. The momentum of the combustion products is balanced by
a momentum imparted to the vehicle in the opposite direction. In rocket propulsion relatively
small masses are involved, which are carried with the vehicle and ejected at high velocities.
The thrust due to the change in momentum is given by:
𝐹 =𝑑𝑚
𝑑𝑡𝑣2 = ��𝑣2 (1.7)
This force represents the total propulsion force when the nozzle exit pressure equals the external
pressure. To be more precise, also the pressure of the surrounding fluid has an influence upon
the thrust.
Page 9
____________________________________________ 1.2 Liquid-fuel rocket engines cycles
3
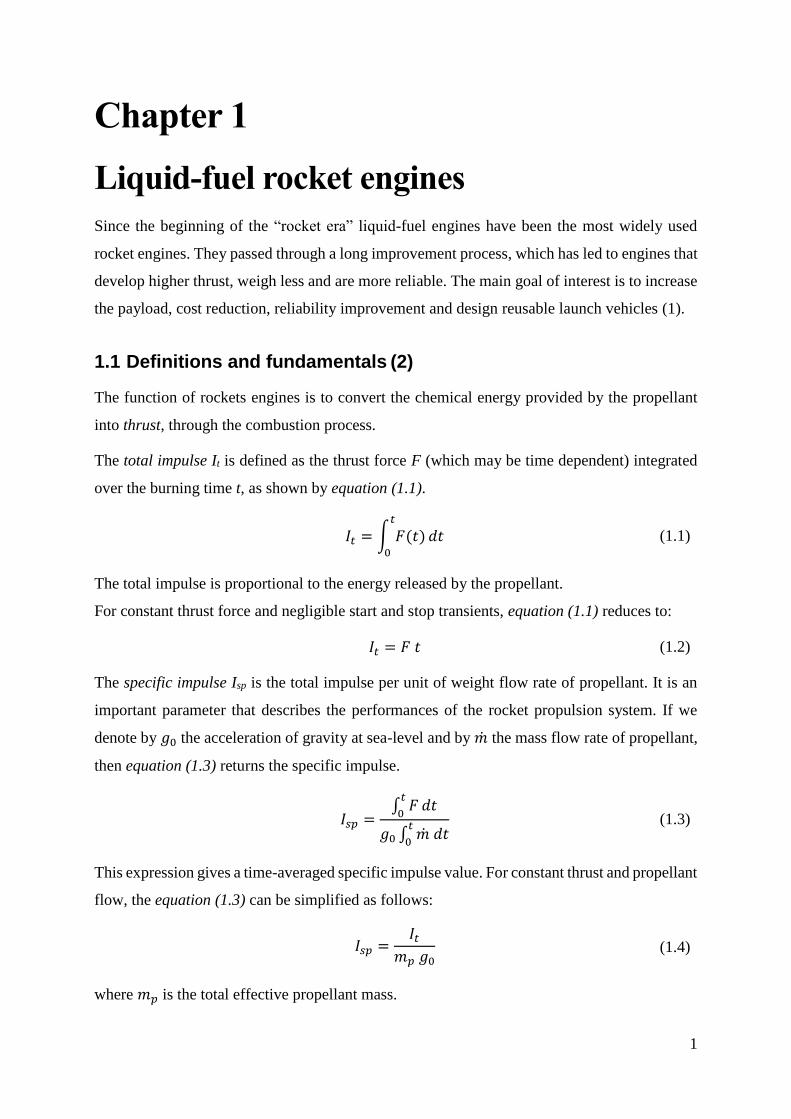
Since rockets move through the atmosphere, they experience a pressure gradient, therefore the
thrust changes during the flight. Figure (1-1) shows the pressure environment acting on the
surface of a rocket combustion chamber and nozzle. The size of the arrows indicates the relative
magnitude of the pressure forces. The axial thrust can be determined by integrating the pressure
acting on areas that can be projected on a plane normal to the nozzle axis. The forces acting
radially do not contribute to the axial thrust because a rocket is typically an axially symmetric
structure.
Figure 1- 1 Combustion chamber and nozzle pressure environment
Because of the change of external pressure due to the variations of altitude, when the pressure
at the nozzle exit differs from the atmosphere pressure, there is an imbalance between the
atmospheric pressure p3 and the pressure at the exit of the nozzle p2. Thus, for a rocket
propulsion system moving through a homogeneous atmosphere, the total thrust is equal to:
𝐹 = ��𝑣2 + (𝑝2 − 𝑝3)𝐴2 (1.8)
The first term represents the thrust due to the conservation of linear momentum, the second
term represent the pressure thrust, due to the difference between the exhaust gas pressure and
the external pressure. For the reason that the atmospheric pressure decreases with increasing
altitude, the thrust and the specific impulse increase as the vehicle reaches higher altitudes.
1.2 Liquid-fuel rocket engines cycles
In liquid-fuel rocket engines, the propellant can be pressurized directly in the tank (pressure-
fed systems) or by the use of a turbopump (pump-fed systems), then combusted in a combustor.
For the pump-fed systems, the engine cycles are classified according to the driving method of
Page 10
Chapter 1 __________________________________________________________________
4
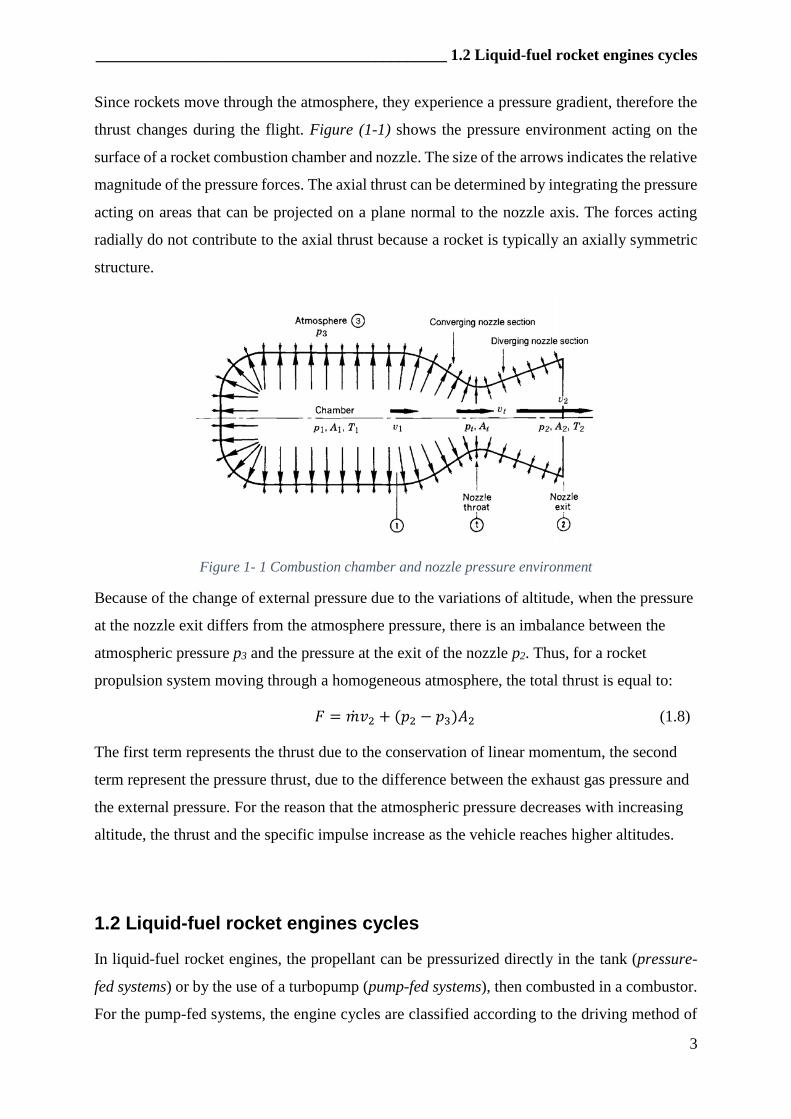
the turbopump turbine. Depending on how the gas is handled after driving the turbine, liquid
rocket engines cycle can be classified as:
Closed cycle: the gas flows through the main combustion chamber and it is combusted
(Figure 1-2 [A]);
Open cycle: the gas is exhausted (Figure 1-2 [B]);
Another possible classification is based on the gas generation method, so the engine can be:
Gas generator: the gas is generated in an auxiliary chamber (Figure 1-2 [1]);
Expander cycle: the gas is generated by the heat produced by the main combustor
(Figure 1-2 [2]);
In this work we are focusing on expander cycle engines.
Figure 1- 2 Rocket engines types
Page 11
____________________________________________________ 1.3 Expander cycle engines
5
1.3 Expander cycle engines
The working principle of an expander cycle engine is to increase the energy of the propellant
fluid (and also of the oxidizer fluid in some variants of the cycle) thanks to the heat produced
by the combustion chamber. The heat is transferred to the fluid using the cooling jacket placed
around the combustion chamber and the nozzle. This high-energy fluid goes into a turbine that
uses part of the fluid energy to drive the propellant and oxidizer turbopump. Once it has been
discharged from the turbine, it is injected into the combustion chamber and burned in the case
of closed expander cycles, or exhausted if the engine works with an open expander cycle.
Generally, cryogenic propellants are used, such as liquid hydrogen (LH2) and liquid oxygen
(LOX).
The main elements of an expander cycle engine are:
Tank system (fuel tank, oxidizer tank);
Turbopump system;
Cooling system;
Injector system;
Main combustion chamber;
Thrust chamber;
The turbopump has the purpose of increasing the fluid pressure to a value able to satisfy the
pressure drop in the cooling system and pipes, the fuel expansion in the turbine and the required
pressure at the injectors.
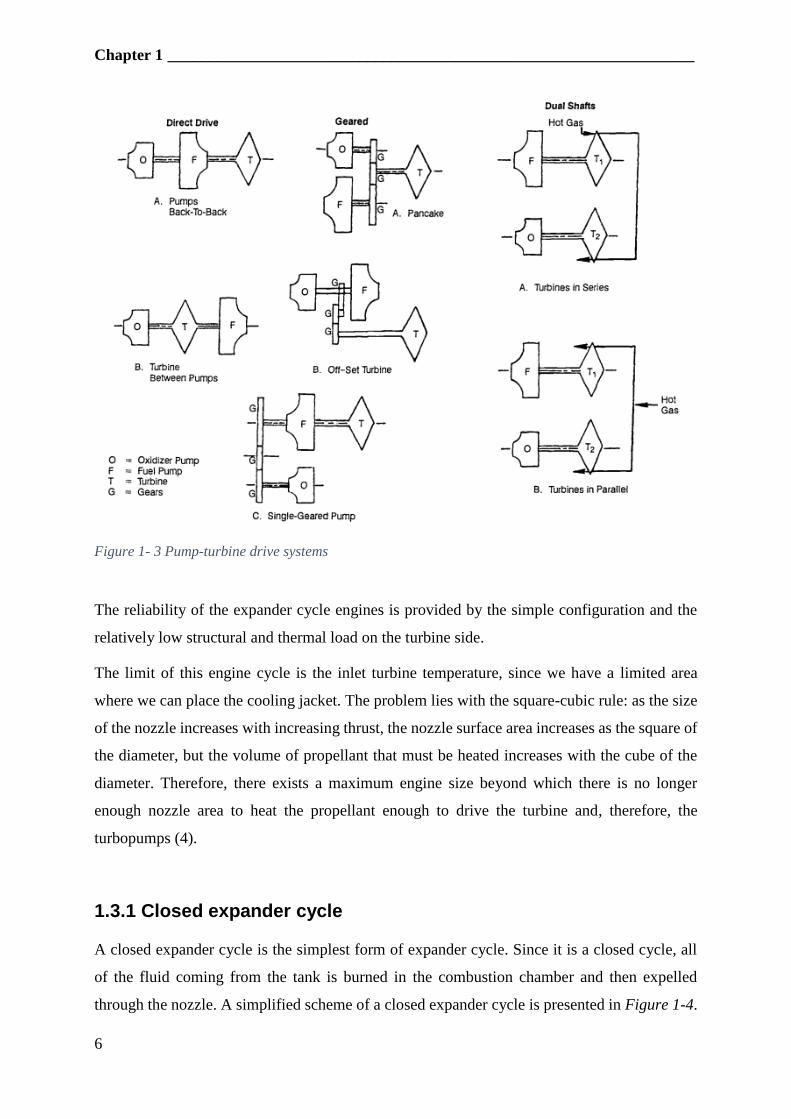
There are many possible configurations for the turbopump system, shown in Figure (1-3) (3).
The first possibility is to install the turbine and the two pumps on the same shaft (Direct drive).
This is a very simple configuration, but the two pumps rotate at the same speed and it may be
not desired. Another option is to install one turbine for each pump on separated shafts (Dual
shaft): in this way we can independently adjust the oxygen and propellant flow going into the
combustion chamber, by acting on a valve placed before the turbine. On the other hand we must
install two turbine, which means less reliability and higher costs and weight. At last, we can
install only one turbine, but oxygen and propellant pumps on two different shafts (Geared). In
this configuration, a gearbox is required to synchronize the rotational speed of the turbopumps.
The gearbox makes the system more complex, heavier and less reliable.
Page 12
Chapter 1 __________________________________________________________________
6
Figure 1- 3 Pump-turbine drive systems
The reliability of the expander cycle engines is provided by the simple configuration and the
relatively low structural and thermal load on the turbine side.
The limit of this engine cycle is the inlet turbine temperature, since we have a limited area
where we can place the cooling jacket. The problem lies with the square-cubic rule: as the size
of the nozzle increases with increasing thrust, the nozzle surface area increases as the square of
the diameter, but the volume of propellant that must be heated increases with the cube of the
diameter. Therefore, there exists a maximum engine size beyond which there is no longer
enough nozzle area to heat the propellant enough to drive the turbine and, therefore, the
turbopumps (4).
1.3.1 Closed expander cycle
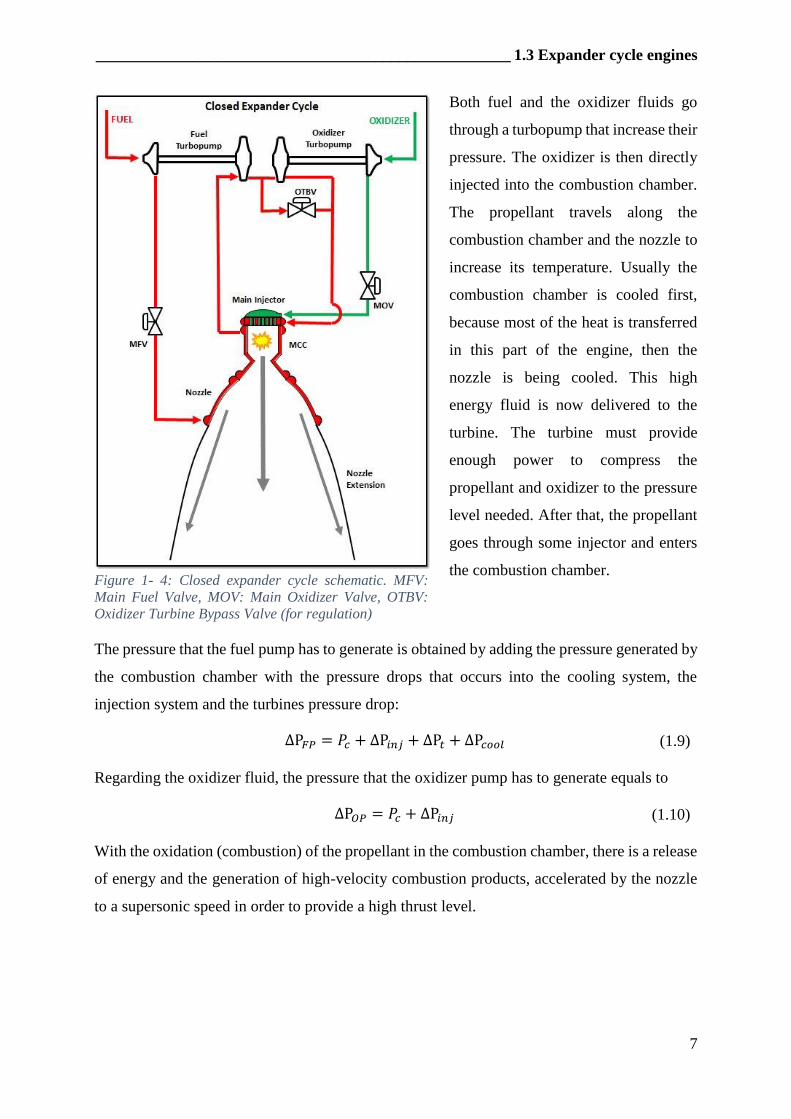
A closed expander cycle is the simplest form of expander cycle. Since it is a closed cycle, all
of the fluid coming from the tank is burned in the combustion chamber and then expelled
through the nozzle. A simplified scheme of a closed expander cycle is presented in Figure 1-4.
Page 13
____________________________________________________ 1.3 Expander cycle engines
7
Both fuel and the oxidizer fluids go
through a turbopump that increase their
pressure. The oxidizer is then directly
injected into the combustion chamber.
The propellant travels along the
combustion chamber and the nozzle to
increase its temperature. Usually the
combustion chamber is cooled first,
because most of the heat is transferred
in this part of the engine, then the
nozzle is being cooled. This high
energy fluid is now delivered to the
turbine. The turbine must provide
enough power to compress the
propellant and oxidizer to the pressure
level needed. After that, the propellant
goes through some injector and enters
the combustion chamber.
The pressure that the fuel pump has to generate is obtained by adding the pressure generated by
the combustion chamber with the pressure drops that occurs into the cooling system, the
injection system and the turbines pressure drop:
ΔP𝐹𝑃 = 𝑃𝑐 + ΔP𝑖𝑛𝑗 + ΔP𝑡 + ΔP𝑐𝑜𝑜𝑙 (1.9)
Regarding the oxidizer fluid, the pressure that the oxidizer pump has to generate equals to
ΔP𝑂𝑃 = 𝑃𝑐 + ΔP𝑖𝑛𝑗 (1.10)
With the oxidation (combustion) of the propellant in the combustion chamber, there is a release
of energy and the generation of high-velocity combustion products, accelerated by the nozzle
to a supersonic speed in order to provide a high thrust level.
Figure 1- 4: Closed expander cycle schematic. MFV:
Main Fuel Valve, MOV: Main Oxidizer Valve, OTBV:
Oxidizer Turbine Bypass Valve (for regulation)
Page 14
Chapter 1 __________________________________________________________________
8
1.3.2 Closed split expander cycle (5) (6)
To increase the thrust of an expander cycle engine the fuel-flow rate provided to the combustion
chamber must be increased. Consequently, the turbopump needs more power, and the turbine
should provide it, but the increase of the fuel flow rate (that means a higher flow velocity)
results in a decrease of the turbine inlet temperature that limits the power available at the
turbine, since the fluid has less time to take energy from the cooling jacket. Because of these
considerations, it is clear that the thrust we can achieve from an expander cycle has a defined
upper limit.
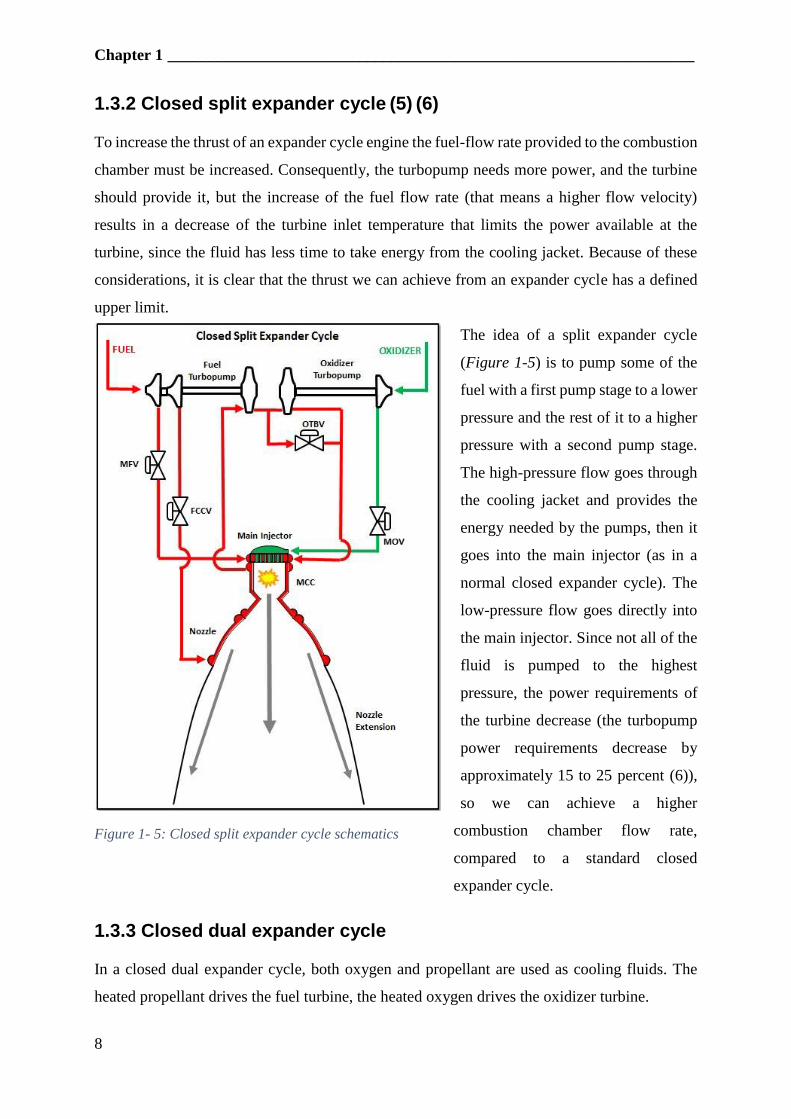
The idea of a split expander cycle
(Figure 1-5) is to pump some of the
fuel with a first pump stage to a lower
pressure and the rest of it to a higher
pressure with a second pump stage.
The high-pressure flow goes through
the cooling jacket and provides the
energy needed by the pumps, then it
goes into the main injector (as in a
normal closed expander cycle). The
low-pressure flow goes directly into
the main injector. Since not all of the
fluid is pumped to the highest
pressure, the power requirements of
the turbine decrease (the turbopump
power requirements decrease by
approximately 15 to 25 percent (6)),
so we can achieve a higher
combustion chamber flow rate,
compared to a standard closed
expander cycle.
1.3.3 Closed dual expander cycle
In a closed dual expander cycle, both oxygen and propellant are used as cooling fluids. The
heated propellant drives the fuel turbine, the heated oxygen drives the oxidizer turbine.
Figure 1- 5: Closed split expander cycle schematics
Page 15
____________________________________________________ 1.3 Expander cycle engines
9
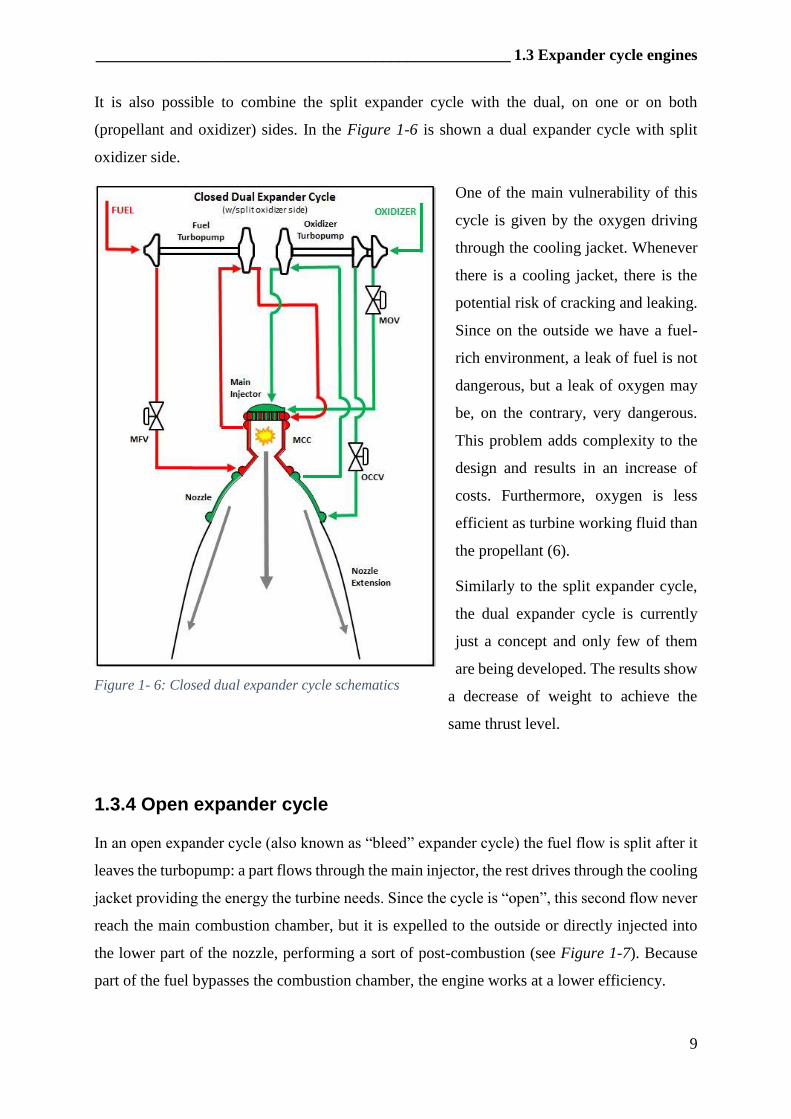
It is also possible to combine the split expander cycle with the dual, on one or on both
(propellant and oxidizer) sides. In the Figure 1-6 is shown a dual expander cycle with split
oxidizer side.
One of the main vulnerability of this
cycle is given by the oxygen driving
through the cooling jacket. Whenever
there is a cooling jacket, there is the
potential risk of cracking and leaking.
Since on the outside we have a fuel-
rich environment, a leak of fuel is not
dangerous, but a leak of oxygen may
be, on the contrary, very dangerous.
This problem adds complexity to the
design and results in an increase of
costs. Furthermore, oxygen is less
efficient as turbine working fluid than
the propellant (6).
Similarly to the split expander cycle,
the dual expander cycle is currently
just a concept and only few of them
are being developed. The results show
a decrease of weight to achieve the
same thrust level.
1.3.4 Open expander cycle
In an open expander cycle (also known as “bleed” expander cycle) the fuel flow is split after it
leaves the turbopump: a part flows through the main injector, the rest drives through the cooling
jacket providing the energy the turbine needs. Since the cycle is “open”, this second flow never
reach the main combustion chamber, but it is expelled to the outside or directly injected into
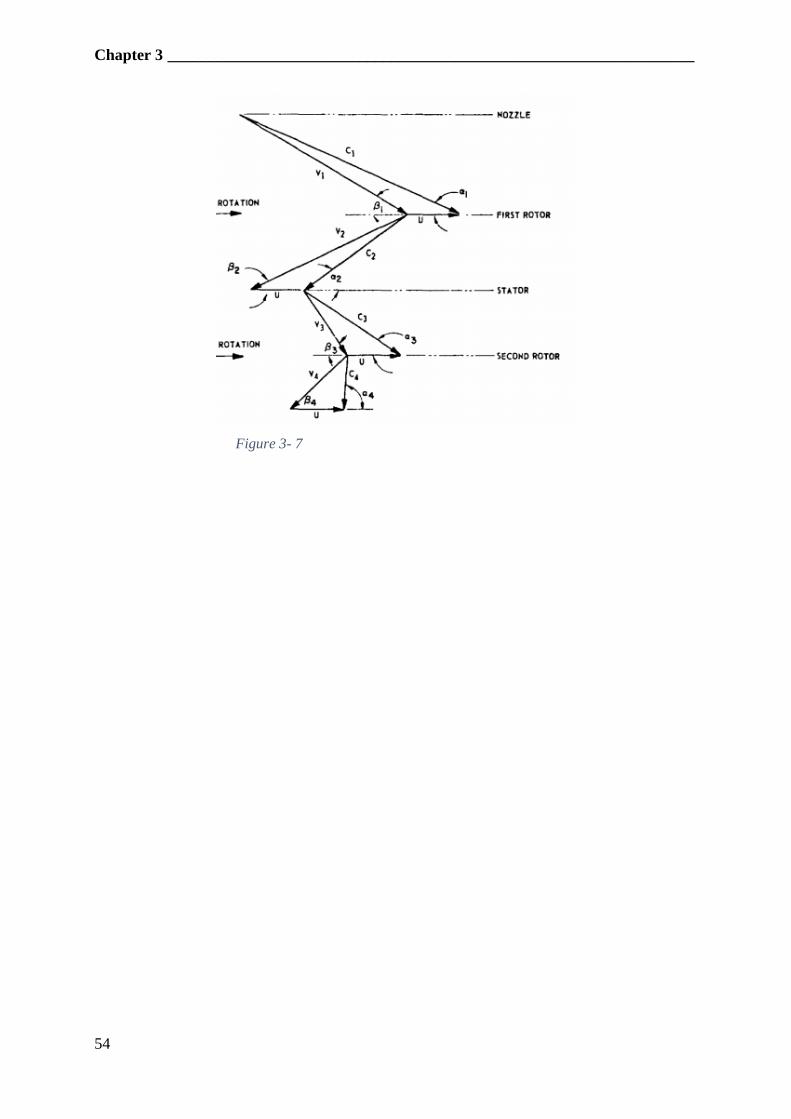
the lower part of the nozzle, performing a sort of post-combustion (see Figure 1-7). Because
part of the fuel bypasses the combustion chamber, the engine works at a lower efficiency.
Figure 1- 6: Closed dual expander cycle schematics
Page 16
Chapter 1 __________________________________________________________________
10
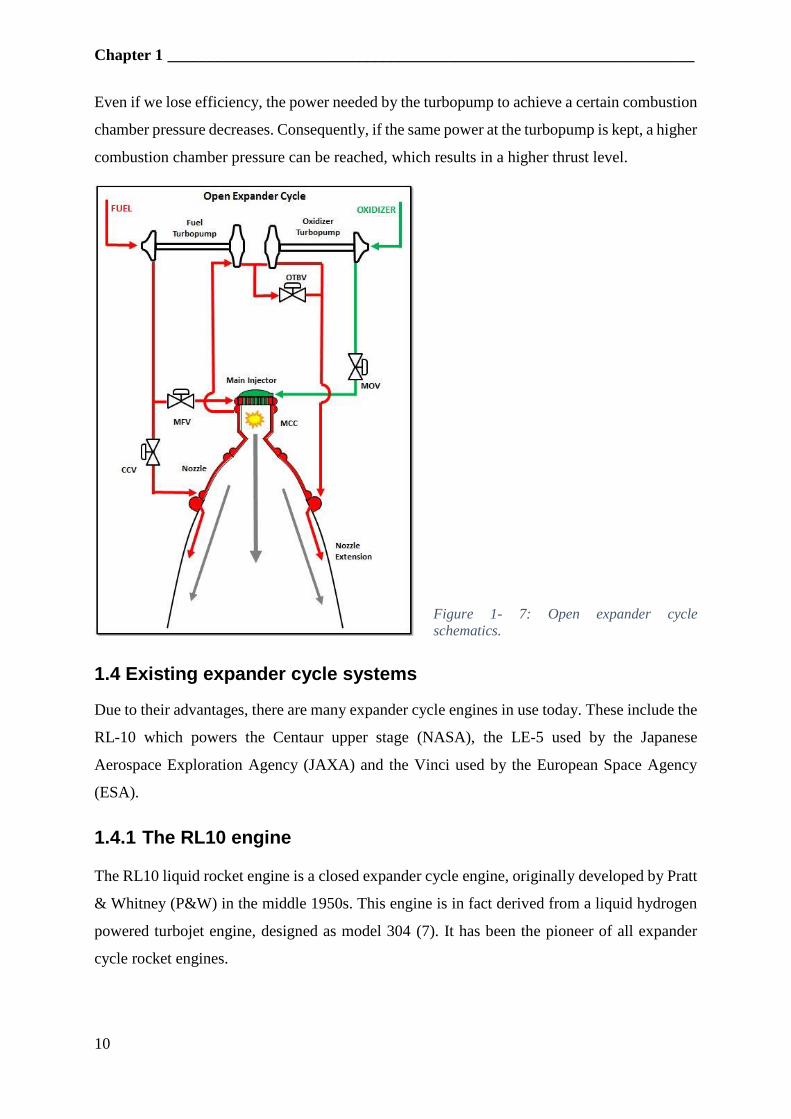
Even if we lose efficiency, the power needed by the turbopump to achieve a certain combustion
chamber pressure decreases. Consequently, if the same power at the turbopump is kept, a higher
combustion chamber pressure can be reached, which results in a higher thrust level.
Figure 1- 7: Open expander cycle
schematics.
1.4 Existing expander cycle systems
Due to their advantages, there are many expander cycle engines in use today. These include the
RL-10 which powers the Centaur upper stage (NASA), the LE-5 used by the Japanese
Aerospace Exploration Agency (JAXA) and the Vinci used by the European Space Agency
(ESA).
1.4.1 The RL10 engine
The RL10 liquid rocket engine is a closed expander cycle engine, originally developed by Pratt
& Whitney (P&W) in the middle 1950s. This engine is in fact derived from a liquid hydrogen
powered turbojet engine, designed as model 304 (7). It has been the pioneer of all expander
cycle rocket engines.
Page 17
_____________________________________________ 1.4 Existing expander cycle systems
11
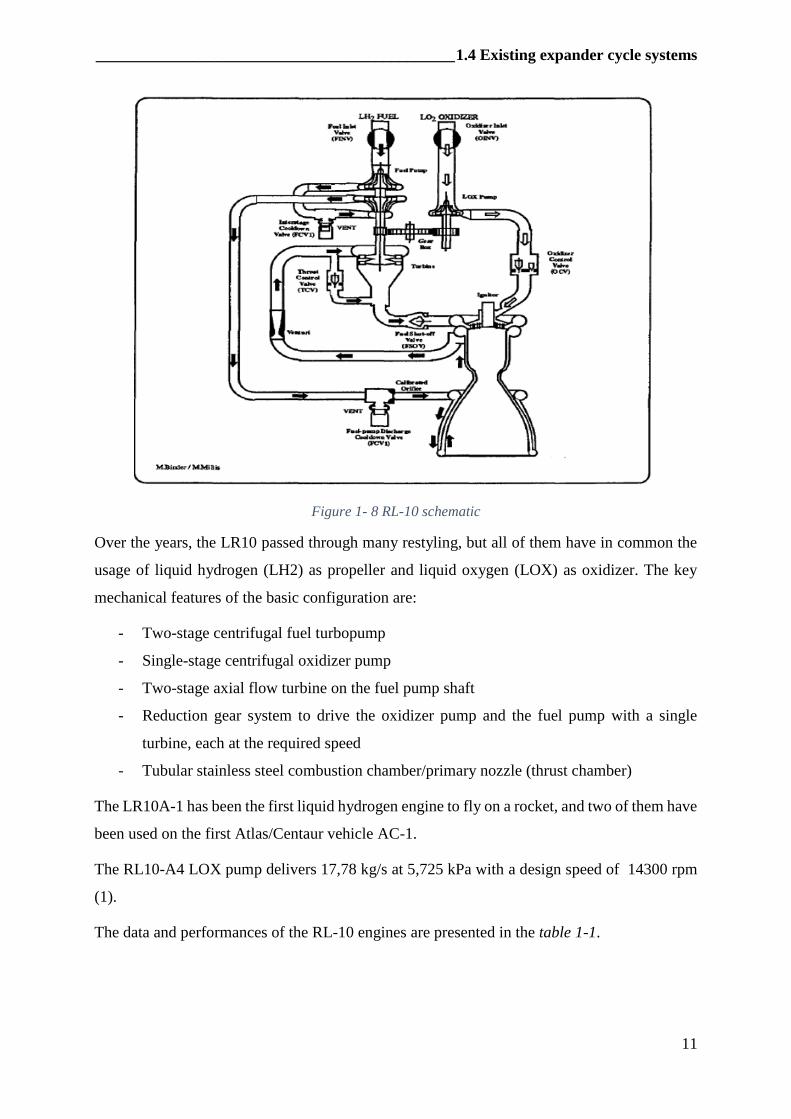
Figure 1- 8 RL-10 schematic
Over the years, the LR10 passed through many restyling, but all of them have in common the
usage of liquid hydrogen (LH2) as propeller and liquid oxygen (LOX) as oxidizer. The key
mechanical features of the basic configuration are:
- Two-stage centrifugal fuel turbopump
- Single-stage centrifugal oxidizer pump
- Two-stage axial flow turbine on the fuel pump shaft
- Reduction gear system to drive the oxidizer pump and the fuel pump with a single
turbine, each at the required speed
- Tubular stainless steel combustion chamber/primary nozzle (thrust chamber)
The LR10A-1 has been the first liquid hydrogen engine to fly on a rocket, and two of them have
been used on the first Atlas/Centaur vehicle AC-1.
The RL10-A4 LOX pump delivers 17,78 kg/s at 5,725 kPa with a design speed of 14300 rpm
(1).
The data and performances of the RL-10 engines are presented in the table 1-1.
Page 18
Chapter 1 __________________________________________________________________
12
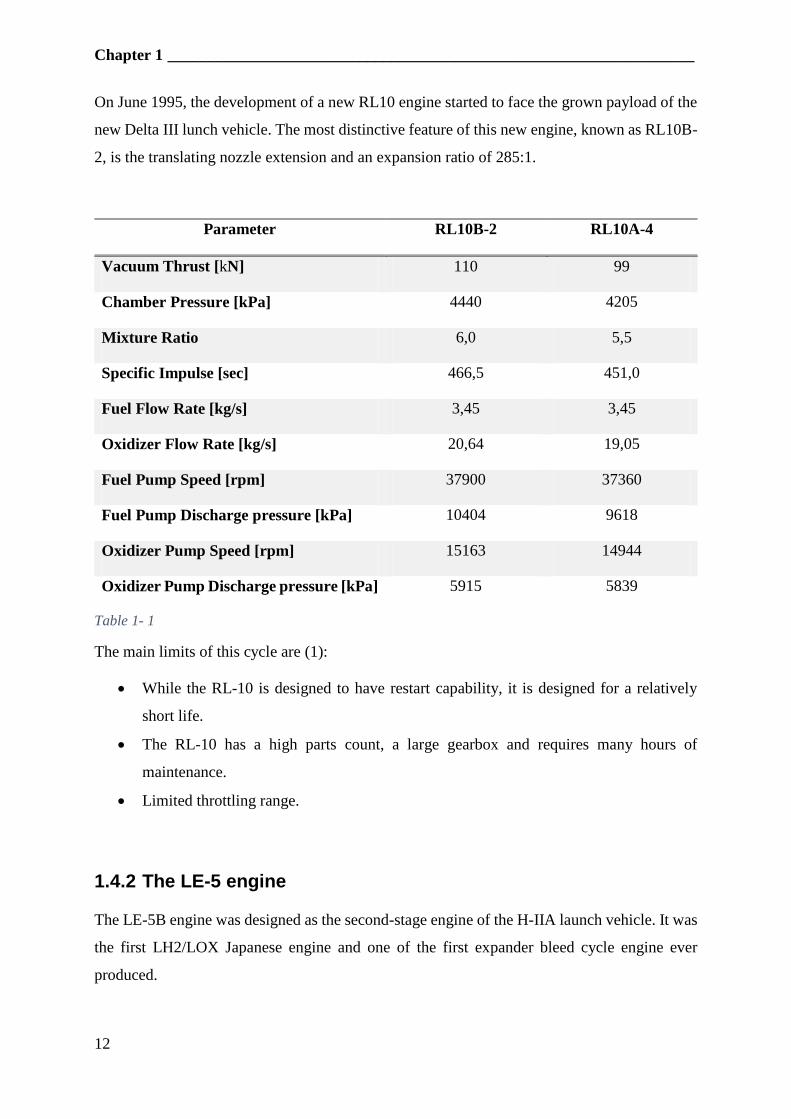
On June 1995, the development of a new RL10 engine started to face the grown payload of the
new Delta III lunch vehicle. The most distinctive feature of this new engine, known as RL10B-
2, is the translating nozzle extension and an expansion ratio of 285:1.
Parameter RL10B-2 RL10A-4
Vacuum Thrust [kN] 110 99
Chamber Pressure [kPa] 4440 4205
Mixture Ratio 6,0 5,5
Specific Impulse [sec] 466,5 451,0
Fuel Flow Rate [kg/s] 3,45 3,45
Oxidizer Flow Rate [kg/s] 20,64 19,05
Fuel Pump Speed [rpm] 37900 37360
Fuel Pump Discharge pressure [kPa] 10404 9618
Oxidizer Pump Speed [rpm] 15163 14944
Oxidizer Pump Discharge pressure [kPa] 5915 5839
Table 1- 1
The main limits of this cycle are (1):
While the RL-10 is designed to have restart capability, it is designed for a relatively
short life.
The RL-10 has a high parts count, a large gearbox and requires many hours of
maintenance.
Limited throttling range.
1.4.2 The LE-5 engine
The LE-5B engine was designed as the second-stage engine of the H-IIA launch vehicle. It was
the first LH2/LOX Japanese engine and one of the first expander bleed cycle engine ever
produced.
Page 19
_____________________________________________ 1.4 Existing expander cycle systems
13
One of the most interesting feature of this engine is the wide operating throttle range: in addition
to 100% rated operations, throttling tests at 60%, 30% and at extremely low levels only using
the tank pressure without operating the turbine were tested and verified a stable operating
capability. (8)
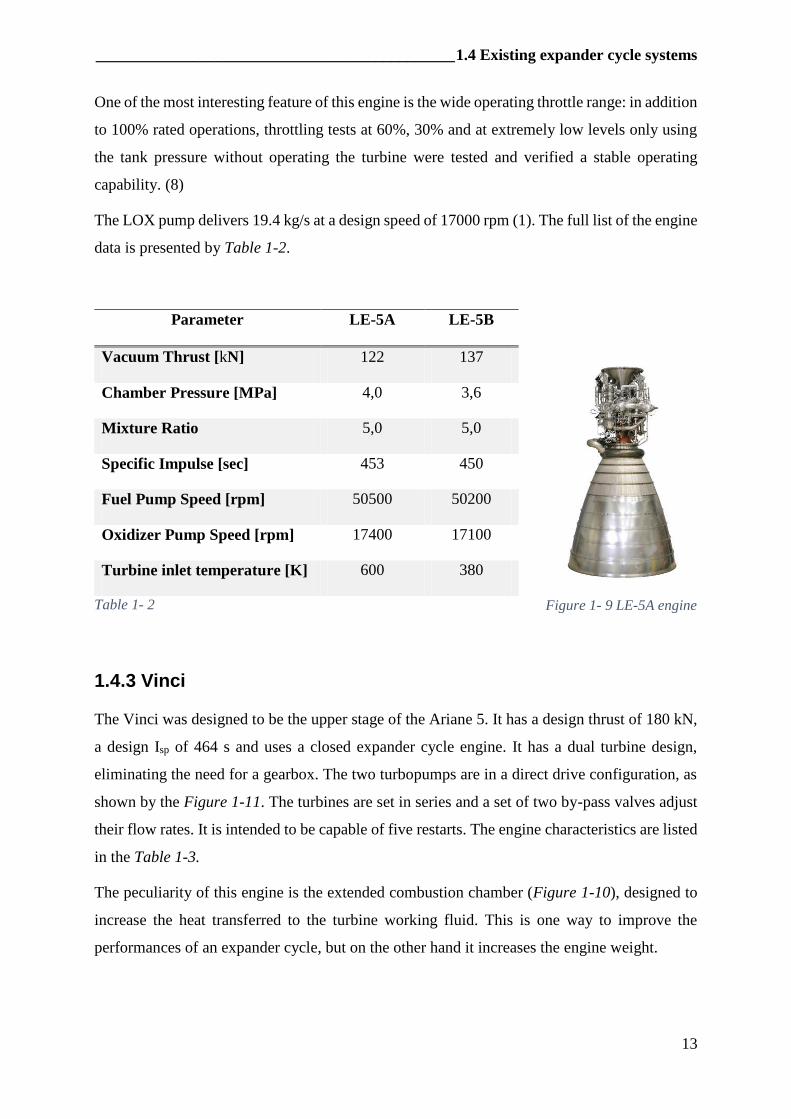
The LOX pump delivers 19.4 kg/s at a design speed of 17000 rpm (1). The full list of the engine
data is presented by Table 1-2.
Parameter LE-5A LE-5B
Vacuum Thrust [kN] 122 137
Chamber Pressure [MPa] 4,0 3,6
Mixture Ratio 5,0 5,0
Specific Impulse [sec] 453 450
Fuel Pump Speed [rpm] 50500 50200
Oxidizer Pump Speed [rpm] 17400 17100
Turbine inlet temperature [K] 600 380
Table 1- 2
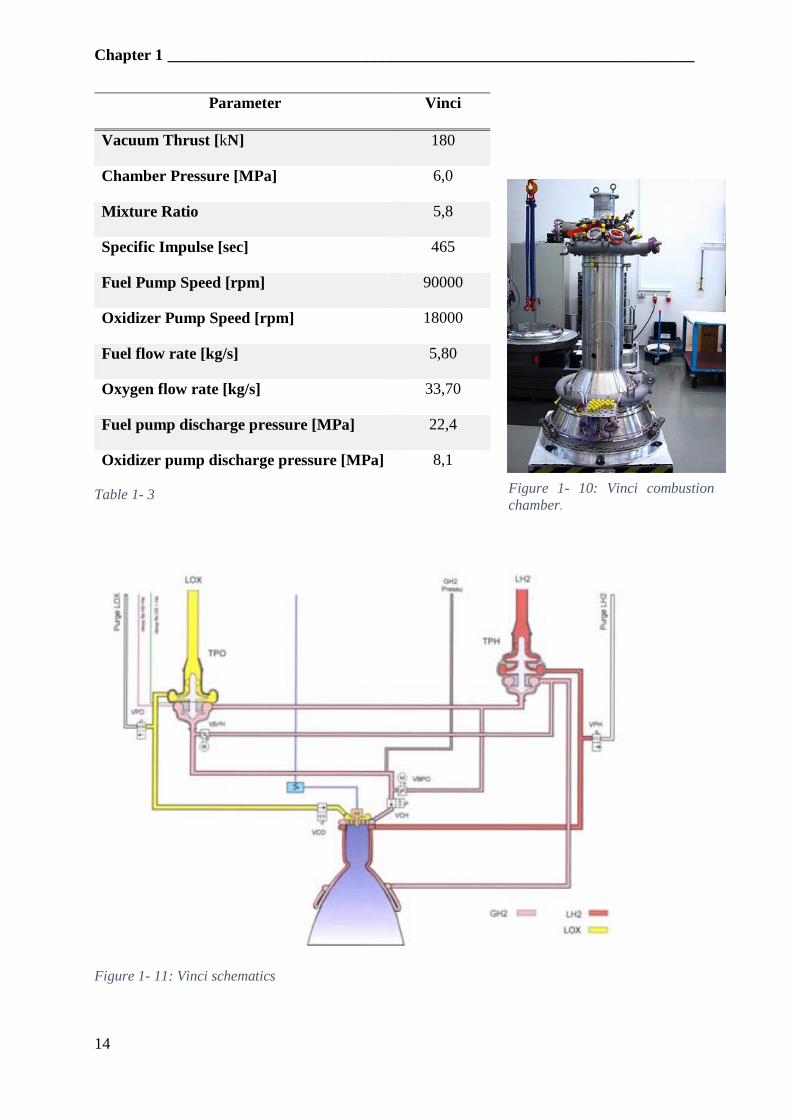
1.4.3 Vinci
The Vinci was designed to be the upper stage of the Ariane 5. It has a design thrust of 180 kN,
a design Isp of 464 s and uses a closed expander cycle engine. It has a dual turbine design,
eliminating the need for a gearbox. The two turbopumps are in a direct drive configuration, as
shown by the Figure 1-11. The turbines are set in series and a set of two by-pass valves adjust
their flow rates. It is intended to be capable of five restarts. The engine characteristics are listed
in the Table 1-3.
The peculiarity of this engine is the extended combustion chamber (Figure 1-10), designed to
increase the heat transferred to the turbine working fluid. This is one way to improve the
performances of an expander cycle, but on the other hand it increases the engine weight.
Figure 1- 9 LE-5A engine
Page 20
Chapter 1 __________________________________________________________________
14
Parameter Vinci
Vacuum Thrust [kN] 180
Chamber Pressure [MPa] 6,0
Mixture Ratio 5,8
Specific Impulse [sec] 465
Fuel Pump Speed [rpm] 90000
Oxidizer Pump Speed [rpm] 18000
Fuel flow rate [kg/s] 5,80
Oxygen flow rate [kg/s] 33,70
Fuel pump discharge pressure [MPa] 22,4
Oxidizer pump discharge pressure [MPa] 8,1
Table 1- 3
Figure 1- 11: Vinci schematics
Figure 1- 10: Vinci combustion
chamber.
Page 21
________________________________________________________ 1.5 Liquid propellants
15
1.5 Liquid propellants
Propellants characteristics affects engine design and performances and the propellant storage.
When choosing a propellant, many factors should be taken into account:
Economic factors. It’s a very important factor. Takes into account the raw material availability
and cost, as well as the production process complexity.
Corrosion hazards. Some propellants (such as hydrogen peroxide and nitrogen tetroxide) have
to be handled in containers of special materials to avoid corrosion. The corrosion products may
make the propellant unsuitable for the designed rocket engine.
Explosion and fire hazards. Some propellants (such as hydrogen peroxide and nitromethane)
are unstable and tend to detonate under certain conditions (temperature, pressure, shock). The
fire hazard is usually associated with the oxidizers, which may start chemical reactions with a
large variety of organic substances.
Health hazards. Many propellants are toxic or poisonous, therefore special precautions have
to be taken.
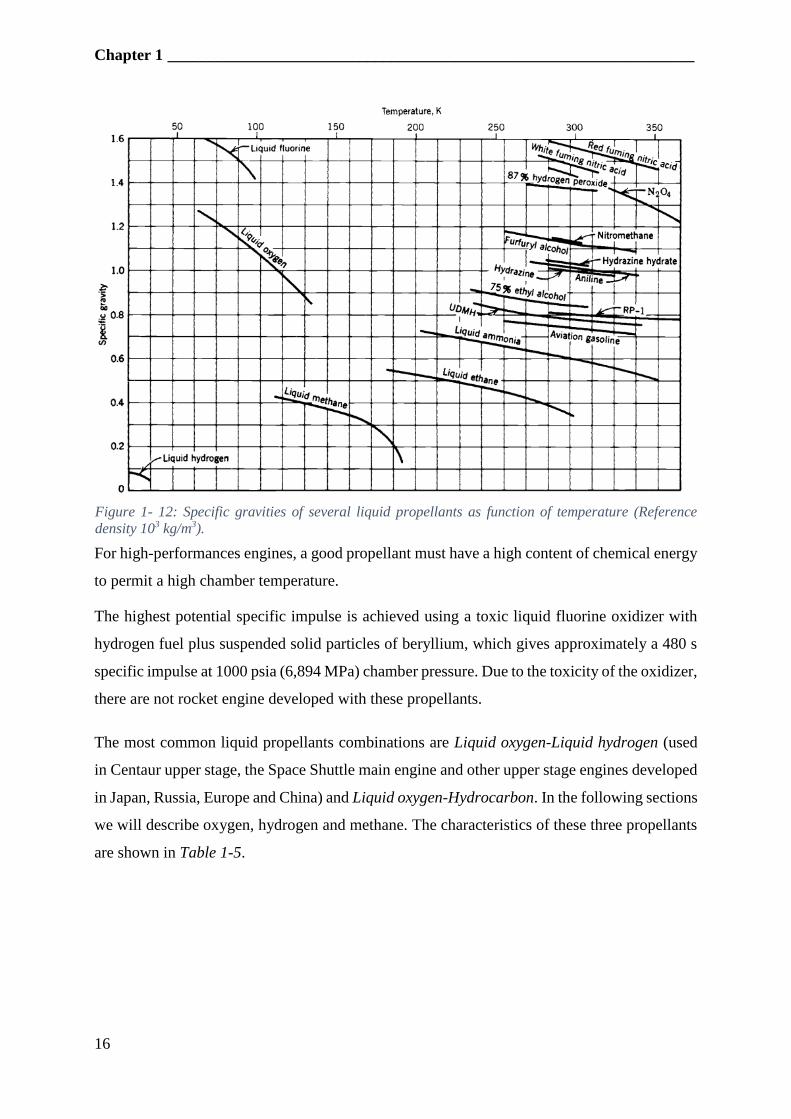
Specific gravity. Higher is the propellant density, lower is the space needed to store it, resulting
in a lower structural vehicle mass and aerodynamic drag. In addition, it affects the mass flow
rate, resulting in better performances for higher specific gravities. Therefore, specific gravity
has an important effect on the engine performances and the maximum flight speed.
Figure 1-12 shows the specific gravities of several liquid rocket engines propellants with
respect to the temperature.
Heat transfer. High specific heat, high thermal conductivity and high boiling point are
desirable for propellants used for thrust chamber cooling.
Vapor pressure. A low vapor pressure permits easier handling of propellants and more
effective pump design (it reduces the potential cavitation point). Propellants with high vapor
pressure (Liquid hydrogen / liquid oxygen) require special design and low-temperature
materials.
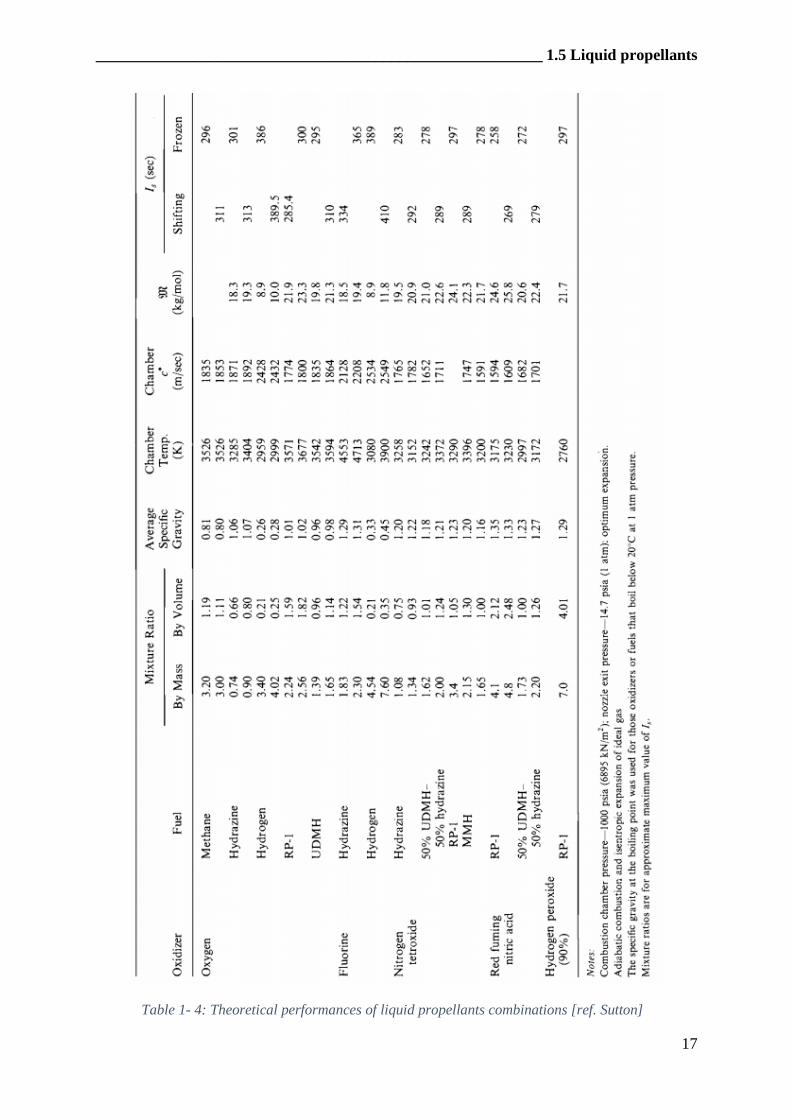
Propellant performances. The propellant performances can be compared in terms of specific
impulse, effective exhaust velocity, specific propellant consumption or other engine parameters.
Performances parameter of various propellants combination can be found in the table 1-4.
Page 22
Chapter 1 __________________________________________________________________
16
For high-performances engines, a good propellant must have a high content of chemical energy
to permit a high chamber temperature.
The highest potential specific impulse is achieved using a toxic liquid fluorine oxidizer with
hydrogen fuel plus suspended solid particles of beryllium, which gives approximately a 480 s
specific impulse at 1000 psia (6,894 MPa) chamber pressure. Due to the toxicity of the oxidizer,
there are not rocket engine developed with these propellants.
The most common liquid propellants combinations are Liquid oxygen-Liquid hydrogen (used
in Centaur upper stage, the Space Shuttle main engine and other upper stage engines developed
in Japan, Russia, Europe and China) and Liquid oxygen-Hydrocarbon. In the following sections
we will describe oxygen, hydrogen and methane. The characteristics of these three propellants
are shown in Table 1-5.
Figure 1- 12: Specific gravities of several liquid propellants as function of temperature (Reference
density 103 kg/m3).
Page 23
________________________________________________________ 1.5 Liquid propellants
17
Table 1- 4: Theoretical performances of liquid propellants combinations [ref. Sutton]
Page 24
Chapter 1 __________________________________________________________________
18
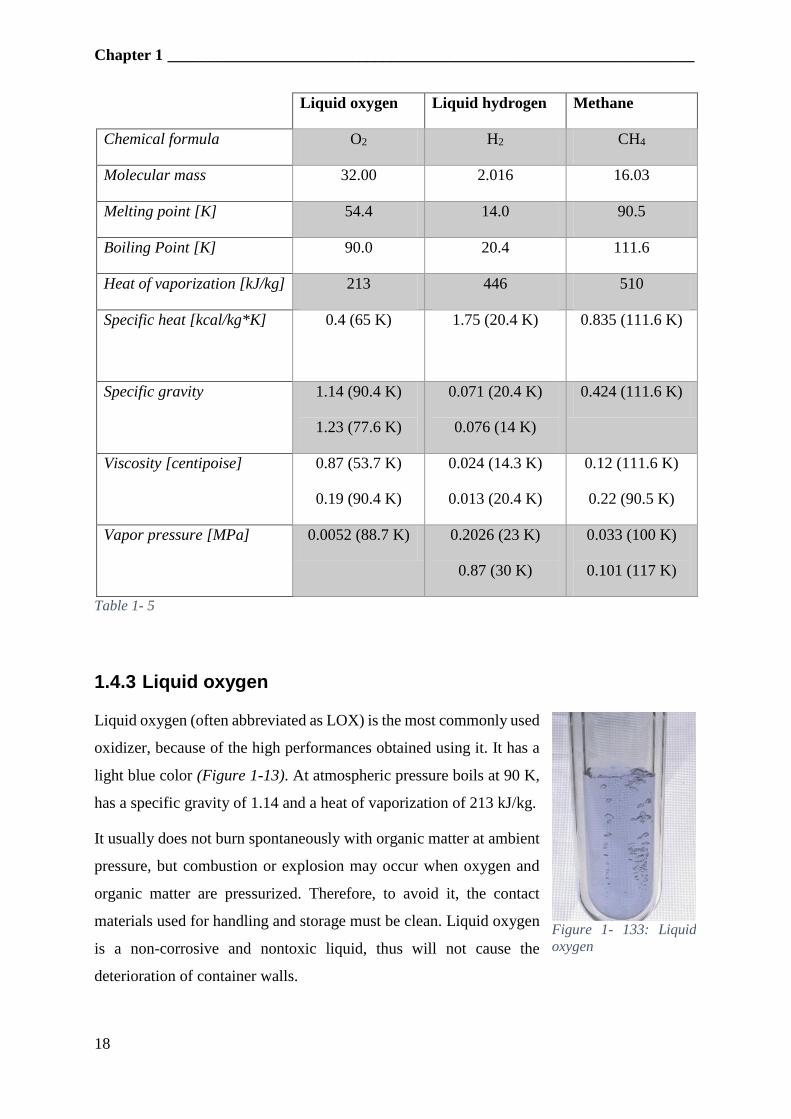
Liquid oxygen Liquid hydrogen Methane
Chemical formula O2 H2 CH4
Molecular mass 32.00 2.016 16.03
Melting point [K] 54.4 14.0 90.5
Boiling Point [K] 90.0 20.4 111.6
Heat of vaporization [kJ/kg] 213 446 510
Specific heat [kcal/kg*K] 0.4 (65 K)
1.75 (20.4 K) 0.835 (111.6 K)
Specific gravity 1.14 (90.4 K)
1.23 (77.6 K)
0.071 (20.4 K)
0.076 (14 K)
0.424 (111.6 K)
Viscosity [centipoise] 0.87 (53.7 K)
0.19 (90.4 K)
0.024 (14.3 K)
0.013 (20.4 K)
0.12 (111.6 K)
0.22 (90.5 K)
Vapor pressure [MPa] 0.0052 (88.7 K) 0.2026 (23 K)
0.87 (30 K)
0.033 (100 K)
0.101 (117 K)
Table 1- 5
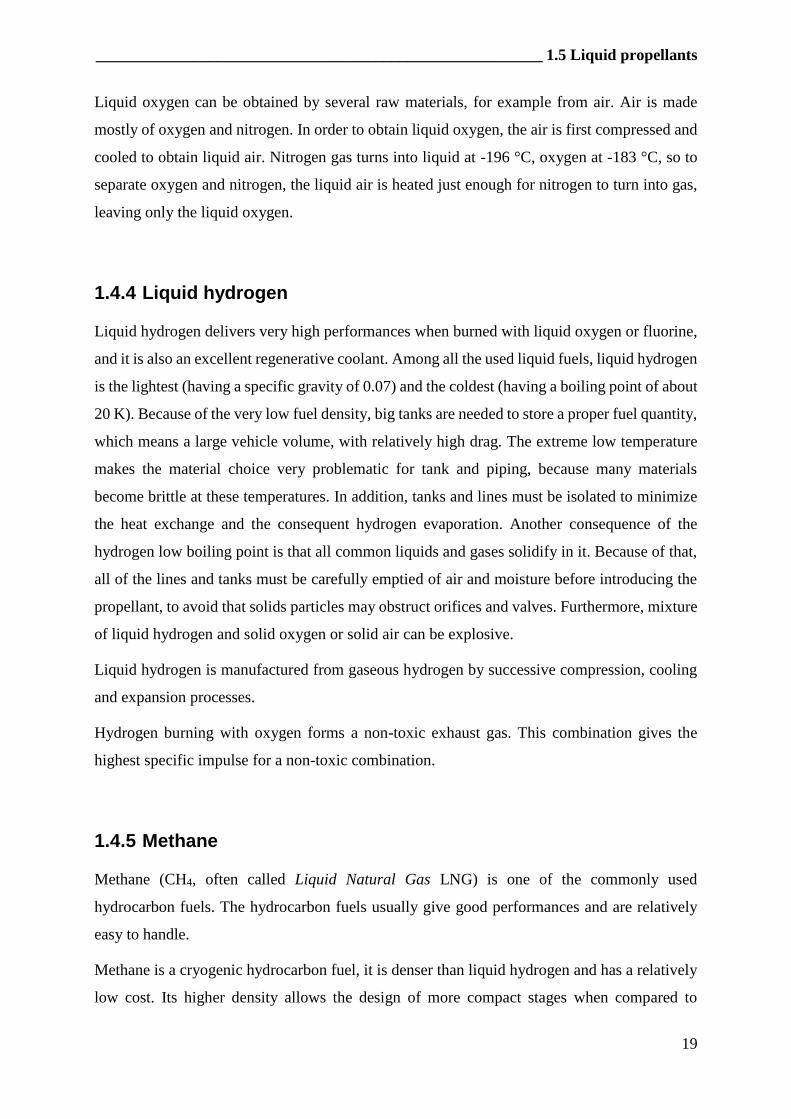
1.4.3 Liquid oxygen
Liquid oxygen (often abbreviated as LOX) is the most commonly used
oxidizer, because of the high performances obtained using it. It has a
light blue color (Figure 1-13). At atmospheric pressure boils at 90 K,
has a specific gravity of 1.14 and a heat of vaporization of 213 kJ/kg.
It usually does not burn spontaneously with organic matter at ambient
pressure, but combustion or explosion may occur when oxygen and
organic matter are pressurized. Therefore, to avoid it, the contact
materials used for handling and storage must be clean. Liquid oxygen
is a non-corrosive and nontoxic liquid, thus will not cause the
deterioration of container walls.
Figure 1- 133: Liquid
oxygen
Page 25
________________________________________________________ 1.5 Liquid propellants
19
Liquid oxygen can be obtained by several raw materials, for example from air. Air is made
mostly of oxygen and nitrogen. In order to obtain liquid oxygen, the air is first compressed and
cooled to obtain liquid air. Nitrogen gas turns into liquid at -196 °C, oxygen at -183 °C, so to
separate oxygen and nitrogen, the liquid air is heated just enough for nitrogen to turn into gas,
leaving only the liquid oxygen.
1.4.4 Liquid hydrogen
Liquid hydrogen delivers very high performances when burned with liquid oxygen or fluorine,
and it is also an excellent regenerative coolant. Among all the used liquid fuels, liquid hydrogen
is the lightest (having a specific gravity of 0.07) and the coldest (having a boiling point of about
20 K). Because of the very low fuel density, big tanks are needed to store a proper fuel quantity,
which means a large vehicle volume, with relatively high drag. The extreme low temperature
makes the material choice very problematic for tank and piping, because many materials
become brittle at these temperatures. In addition, tanks and lines must be isolated to minimize
the heat exchange and the consequent hydrogen evaporation. Another consequence of the
hydrogen low boiling point is that all common liquids and gases solidify in it. Because of that,
all of the lines and tanks must be carefully emptied of air and moisture before introducing the
propellant, to avoid that solids particles may obstruct orifices and valves. Furthermore, mixture
of liquid hydrogen and solid oxygen or solid air can be explosive.
Liquid hydrogen is manufactured from gaseous hydrogen by successive compression, cooling
and expansion processes.
Hydrogen burning with oxygen forms a non-toxic exhaust gas. This combination gives the
highest specific impulse for a non-toxic combination.
1.4.5 Methane
Methane (CH4, often called Liquid Natural Gas LNG) is one of the commonly used
hydrocarbon fuels. The hydrocarbon fuels usually give good performances and are relatively
easy to handle.
Methane is a cryogenic hydrocarbon fuel, it is denser than liquid hydrogen and has a relatively
low cost. Its higher density allows the design of more compact stages when compared to
Page 26
Chapter 1 __________________________________________________________________
20
hydrogen, making a lighter vehicle with lower drag, which compensates the lower specific
impulse.
There are some concepts for operating a rocket stage using two fuel, initially with methane and
then switching during flight to hydrogen, but they are not fully developed yet. (2)
Page 27
21
Chapter 2
Propellant pump
2.1 Introduction
The propellant feed system of a liquid rocket engine is responsible for delivering the propellants
from the tanks to the combustion chamber, at the required flow rate and pressure conditions.
The propellant feed system consists of propellant tanks, feed lines (tubes and ducts), valves and
pressurization devices. Depending on how propellants are pressurized and fed into the
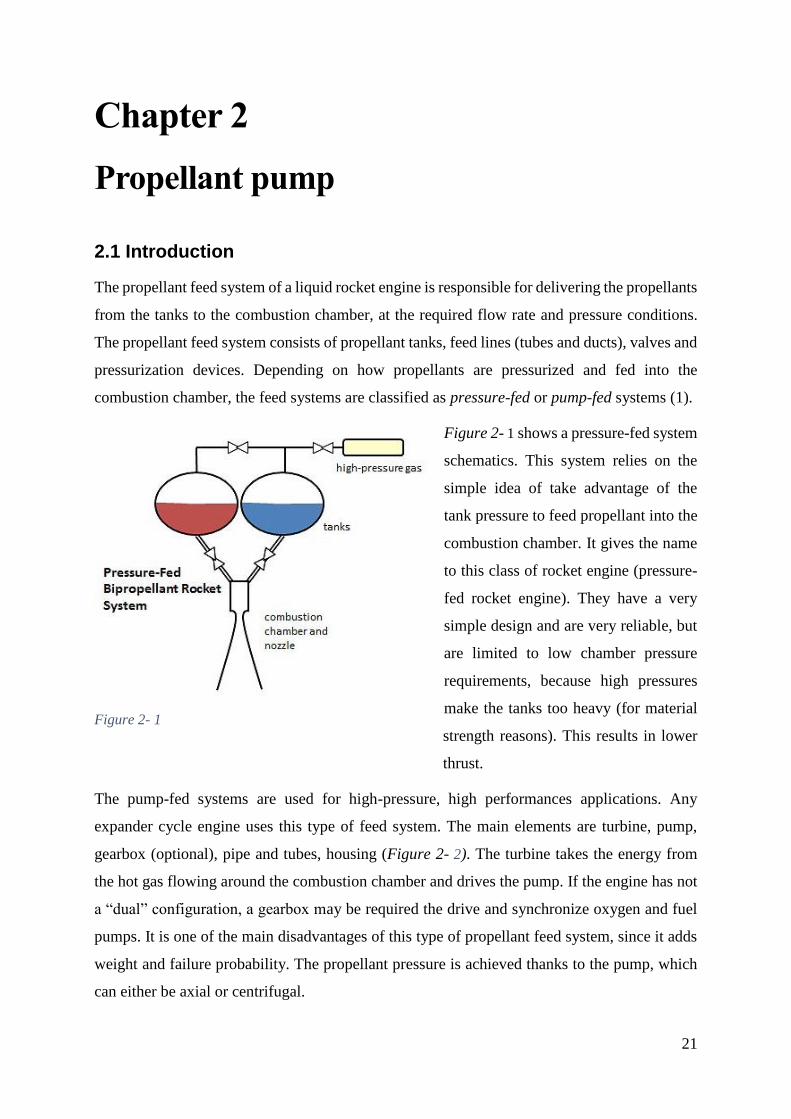
combustion chamber, the feed systems are classified as pressure-fed or pump-fed systems (1).
Figure 2- 1 shows a pressure-fed system
schematics. This system relies on the
simple idea of take advantage of the
tank pressure to feed propellant into the
combustion chamber. It gives the name
to this class of rocket engine (pressure-
fed rocket engine). They have a very
simple design and are very reliable, but
are limited to low chamber pressure
requirements, because high pressures
make the tanks too heavy (for material
strength reasons). This results in lower
thrust.
The pump-fed systems are used for high-pressure, high performances applications. Any
expander cycle engine uses this type of feed system. The main elements are turbine, pump,
gearbox (optional), pipe and tubes, housing (Figure 2- 2). The turbine takes the energy from
the hot gas flowing around the combustion chamber and drives the pump. If the engine has not
a “dual” configuration, a gearbox may be required the drive and synchronize oxygen and fuel
pumps. It is one of the main disadvantages of this type of propellant feed system, since it adds
weight and failure probability. The propellant pressure is achieved thanks to the pump, which
can either be axial or centrifugal.
Figure 2- 1
Page 28
Chapter 2 __________________________________________________________________
22
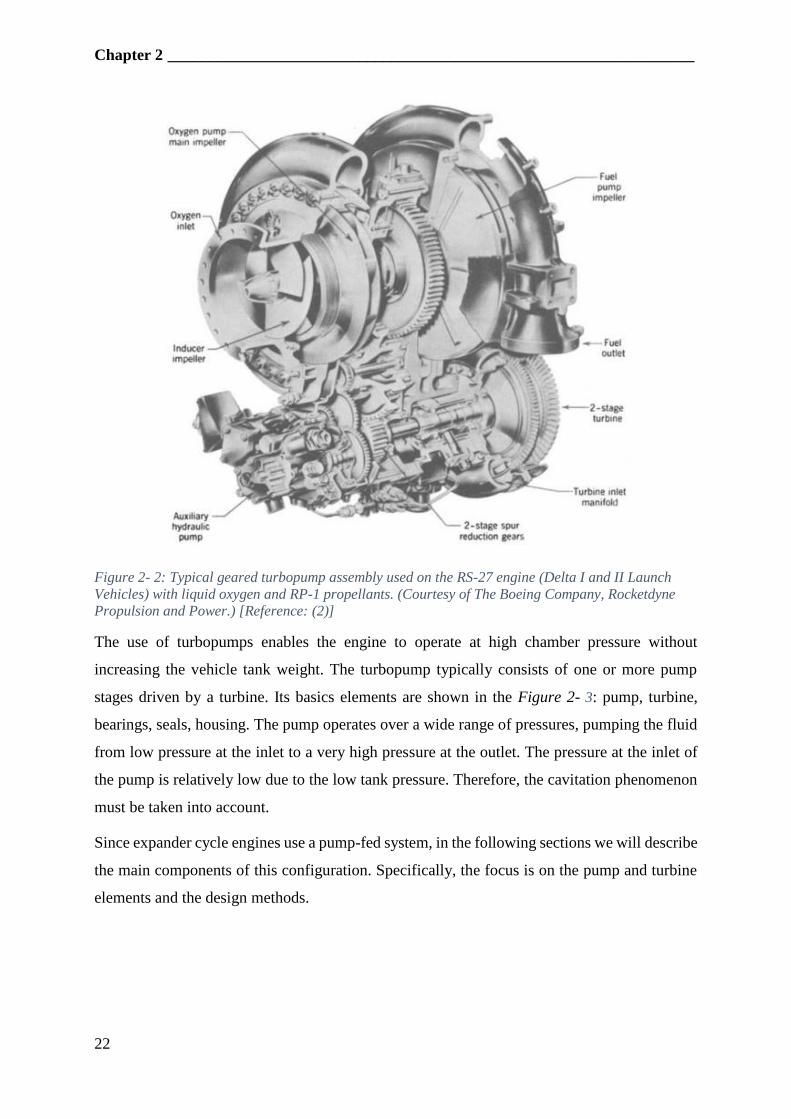
Figure 2- 2: Typical geared turbopump assembly used on the RS-27 engine (Delta I and II Launch
Vehicles) with liquid oxygen and RP-1 propellants. (Courtesy of The Boeing Company, Rocketdyne
Propulsion and Power.) [Reference: (2)]
The use of turbopumps enables the engine to operate at high chamber pressure without
increasing the vehicle tank weight. The turbopump typically consists of one or more pump
stages driven by a turbine. Its basics elements are shown in the Figure 2- 3: pump, turbine,
bearings, seals, housing. The pump operates over a wide range of pressures, pumping the fluid
from low pressure at the inlet to a very high pressure at the outlet. The pressure at the inlet of
the pump is relatively low due to the low tank pressure. Therefore, the cavitation phenomenon
must be taken into account.
Since expander cycle engines use a pump-fed system, in the following sections we will describe
the main components of this configuration. Specifically, the focus is on the pump and turbine
elements and the design methods.
Page 29
_________________________________________________________ 2.2 Pump description
23
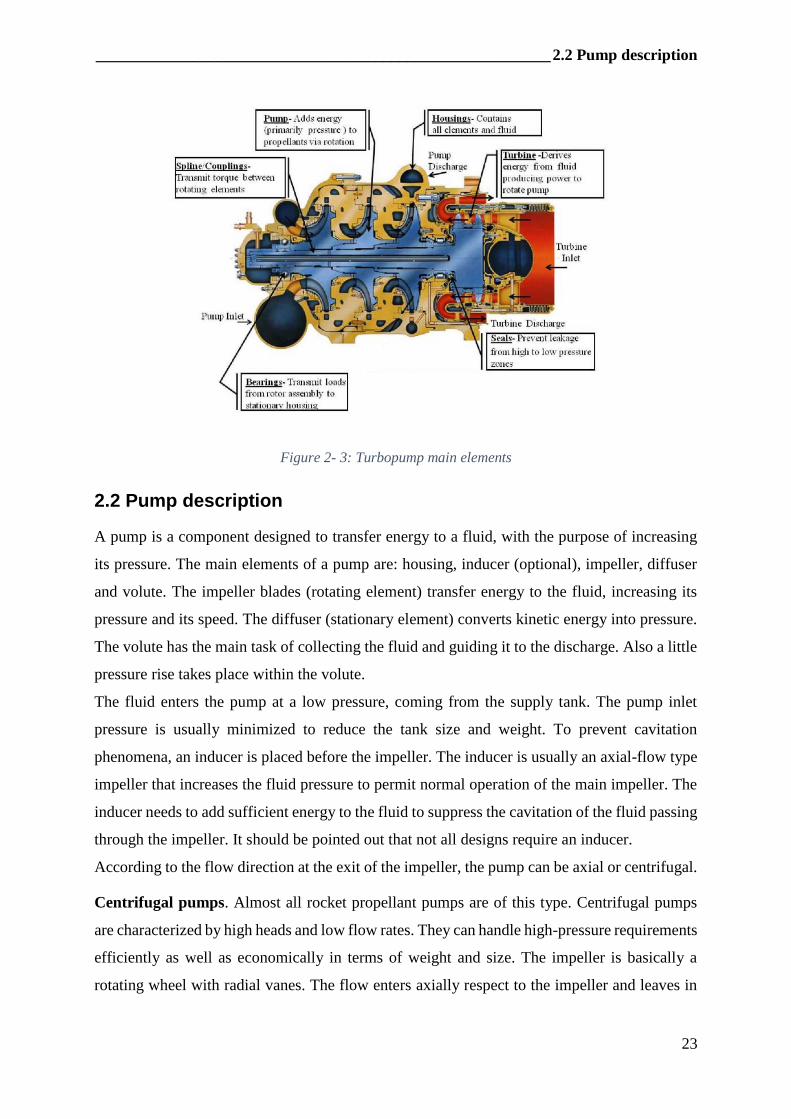
Figure 2- 3: Turbopump main elements
2.2 Pump description
A pump is a component designed to transfer energy to a fluid, with the purpose of increasing
its pressure. The main elements of a pump are: housing, inducer (optional), impeller, diffuser
and volute. The impeller blades (rotating element) transfer energy to the fluid, increasing its
pressure and its speed. The diffuser (stationary element) converts kinetic energy into pressure.
The volute has the main task of collecting the fluid and guiding it to the discharge. Also a little
pressure rise takes place within the volute.
The fluid enters the pump at a low pressure, coming from the supply tank. The pump inlet
pressure is usually minimized to reduce the tank size and weight. To prevent cavitation
phenomena, an inducer is placed before the impeller. The inducer is usually an axial-flow type
impeller that increases the fluid pressure to permit normal operation of the main impeller. The
inducer needs to add sufficient energy to the fluid to suppress the cavitation of the fluid passing
through the impeller. It should be pointed out that not all designs require an inducer.
According to the flow direction at the exit of the impeller, the pump can be axial or centrifugal.
Centrifugal pumps. Almost all rocket propellant pumps are of this type. Centrifugal pumps
are characterized by high heads and low flow rates. They can handle high-pressure requirements
efficiently as well as economically in terms of weight and size. The impeller is basically a
rotating wheel with radial vanes. The flow enters axially respect to the impeller and leaves in
Page 30
Chapter 2 __________________________________________________________________
24
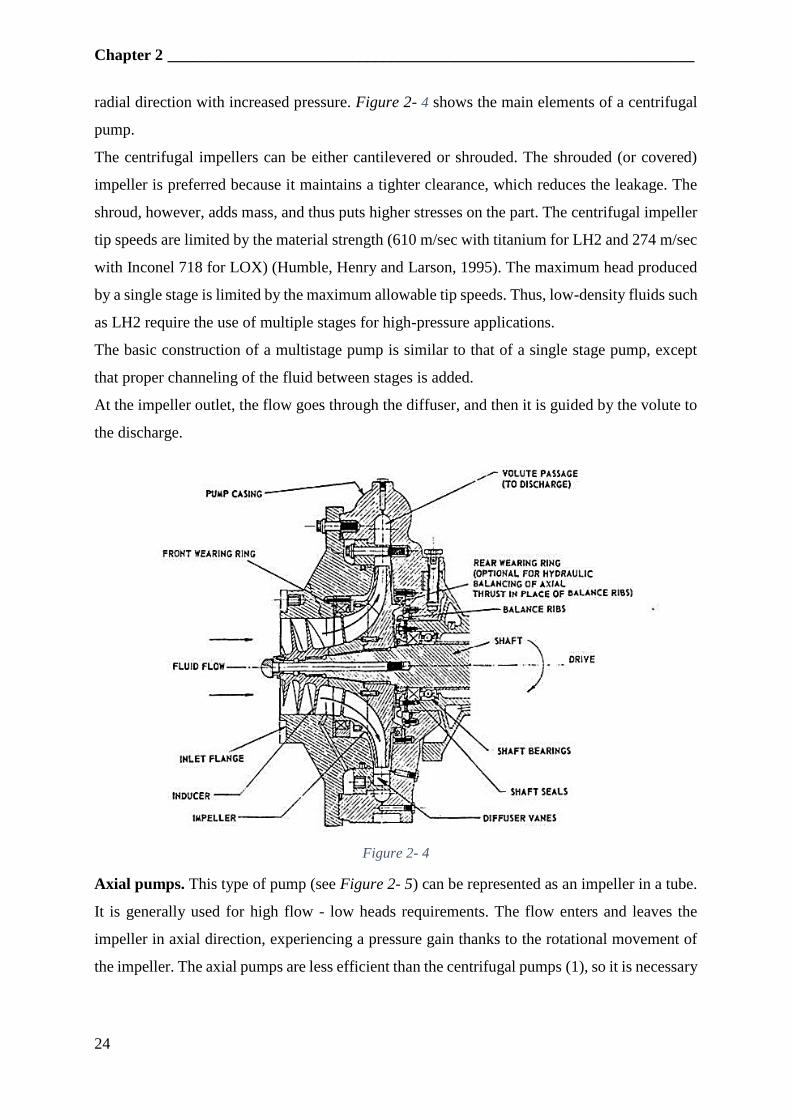
radial direction with increased pressure. Figure 2- 4 shows the main elements of a centrifugal
pump.
The centrifugal impellers can be either cantilevered or shrouded. The shrouded (or covered)
impeller is preferred because it maintains a tighter clearance, which reduces the leakage. The
shroud, however, adds mass, and thus puts higher stresses on the part. The centrifugal impeller
tip speeds are limited by the material strength (610 m/sec with titanium for LH2 and 274 m/sec
with Inconel 718 for LOX) (Humble, Henry and Larson, 1995). The maximum head produced
by a single stage is limited by the maximum allowable tip speeds. Thus, low-density fluids such
as LH2 require the use of multiple stages for high-pressure applications.
The basic construction of a multistage pump is similar to that of a single stage pump, except
that proper channeling of the fluid between stages is added.
At the impeller outlet, the flow goes through the diffuser, and then it is guided by the volute to
the discharge.
Figure 2- 4
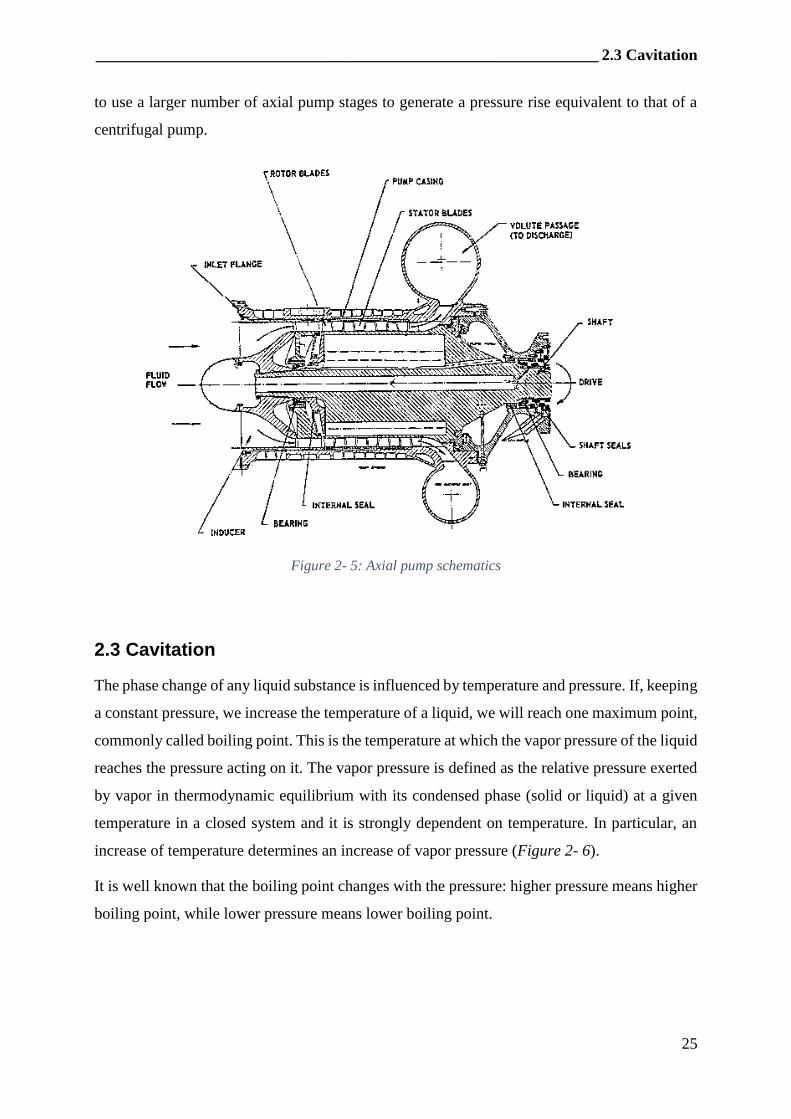
Axial pumps. This type of pump (see Figure 2- 5) can be represented as an impeller in a tube.
It is generally used for high flow - low heads requirements. The flow enters and leaves the
impeller in axial direction, experiencing a pressure gain thanks to the rotational movement of
the impeller. The axial pumps are less efficient than the centrifugal pumps (1), so it is necessary
Page 31
_______________________________________________________________ 2.3 Cavitation
25
to use a larger number of axial pump stages to generate a pressure rise equivalent to that of a
centrifugal pump.
Figure 2- 5: Axial pump schematics
2.3 Cavitation
The phase change of any liquid substance is influenced by temperature and pressure. If, keeping
a constant pressure, we increase the temperature of a liquid, we will reach one maximum point,
commonly called boiling point. This is the temperature at which the vapor pressure of the liquid
reaches the pressure acting on it. The vapor pressure is defined as the relative pressure exerted
by vapor in thermodynamic equilibrium with its condensed phase (solid or liquid) at a given
temperature in a closed system and it is strongly dependent on temperature. In particular, an
increase of temperature determines an increase of vapor pressure (Figure 2- 6).
It is well known that the boiling point changes with the pressure: higher pressure means higher
boiling point, while lower pressure means lower boiling point.
Page 32
Chapter 2 __________________________________________________________________
26
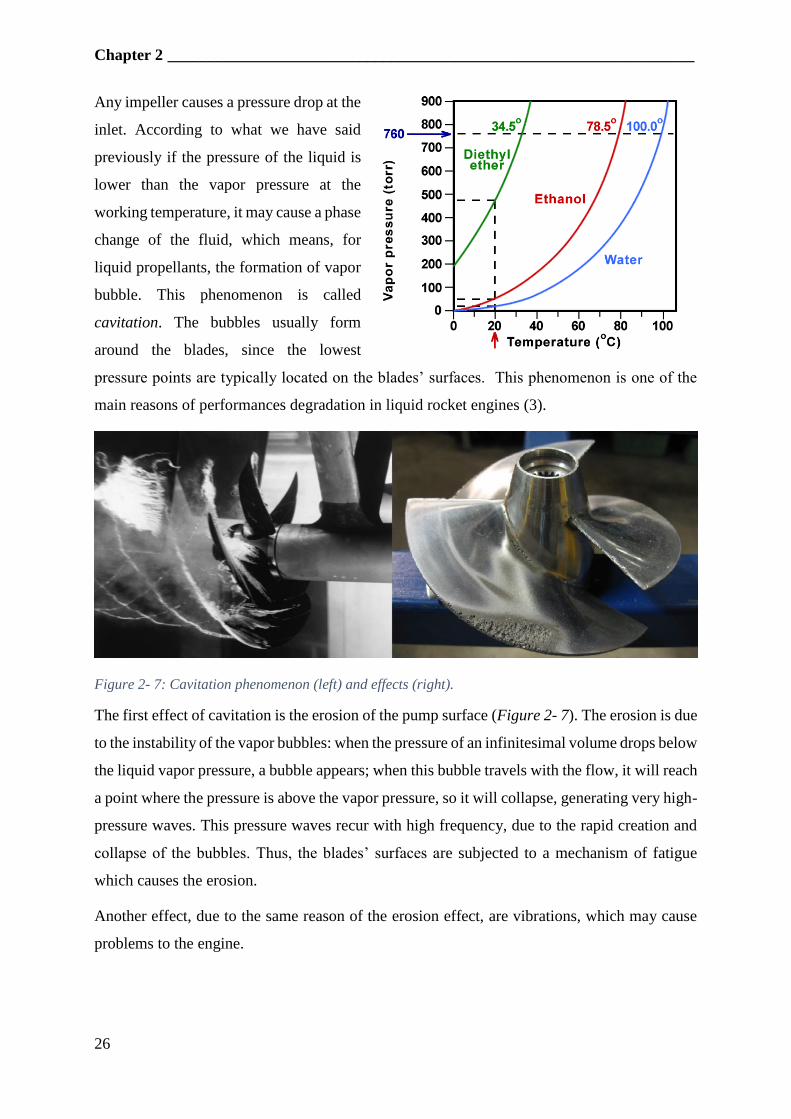
Any impeller causes a pressure drop at the
inlet. According to what we have said
previously if the pressure of the liquid is
lower than the vapor pressure at the
working temperature, it may cause a phase
change of the fluid, which means, for
liquid propellants, the formation of vapor
bubble. This phenomenon is called
cavitation. The bubbles usually form
around the blades, since the lowest
pressure points are typically located on the blades’ surfaces. This phenomenon is one of the
main reasons of performances degradation in liquid rocket engines (3).
Figure 2- 7: Cavitation phenomenon (left) and effects (right).
The first effect of cavitation is the erosion of the pump surface (Figure 2- 7). The erosion is due
to the instability of the vapor bubbles: when the pressure of an infinitesimal volume drops below
the liquid vapor pressure, a bubble appears; when this bubble travels with the flow, it will reach
a point where the pressure is above the vapor pressure, so it will collapse, generating very high-
pressure waves. This pressure waves recur with high frequency, due to the rapid creation and
collapse of the bubbles. Thus, the blades’ surfaces are subjected to a mechanism of fatigue
which causes the erosion.
Another effect, due to the same reason of the erosion effect, are vibrations, which may cause
problems to the engine.
Figure 2- 6
Page 33
_________________________________________________________ 2.4 Pump parameters
27
The last effect considered is the instability of the volumetric flow, due to the increase of volume
caused by the bubbles formation. This phenomenon may cause non-optimal combustion and
reduce the thrust.
Figure 2- 8: Fuel pump inducer impeller of the Space Shuttle
main engine lowpressure fuel turbopump. It has a diameter
about 10 in., a nominal hydrogen flow of148.6 lbm/sec, a
suction pressure of 30 psi, a discharge pressure of 280 psi at
15,765 rpm,an efficiency of 77%, and a suction specific speed
of 39,000 when tested with water.
(Courtesy of The Boeing Company, Rocketdyne Propulsion
and Power.) [Reference: (2)]
As we will see in the section 2.4, the cavitation phenomenon is related to the tank pressure.
Thus to avoid it we should increase the tank pressure, and consequently the vehicle weight. One
method to avoid cavitation without increasing the tank pressure is to place an inducer (Figure
2- 8) before the impeller inlet. The inducer is a special pump impeller, usually connected to the
same shaft and rotating at the same speed of the main impeller. Inducers are basically axial flow
pumps with a spiral impeller, and they usually operate under slightly cavitation conditions (at
their inlet). The inducer head is typically very low (2 to 10% of the total pump head (2)), since
it has to be just large enough to suppress cavitation in the main pump. This allows a smaller
and lighter main pump.
2.4 Pump parameters
In this section we are going to define some important parameters needed during the design
process of a rocket propellant pump.
Required pump mass flow - 𝒎 [𝒌𝒈
𝒔]
The required mass flow:
where v is the flow speed, A is the cross sectional area and 𝜌 is the fluid density is determined
by the rocket design to achieve a given thrust, effective exhaust velocity and mixture ratio. In
�� = 𝜌 ∗ 𝑣 ∗ 𝐴 (2.1)
Page 34
Chapter 2 __________________________________________________________________
28
addition to the flow required by the combustion chamber, if part of the flow bypasses the pump,
it has also to be accounted for.
The product v*A is defined as volumetric flow rate Q [𝑚3
𝑠] and can be determined by one of the
two relations presents in Equation (2.2).
𝑄 = 𝑣 ∗ 𝐴 = 𝑚
𝜌
(2.2)
Mixture ratio - 𝜶
The mass flow (as well as the volumetric flow rate) represent the total flow of propellant, so it
is important to know the mixture ratio between fuel and oxidizer. The mixture ratio is defined
as the oxidizer mass flow divided by the fuel mass flow, as shown by equation (2.3).
𝛼 = 𝑚𝑜
𝑚𝑓 (2.3)
For RP-1/LOX it usually ranges between 2.2 and 3, for Hydrogen/LOX has values between 5
and 7.
Required pump discharge pressure - 𝒑𝒅 [𝑷𝒂]
It is determined from the chamber pressure and the hydraulic losses in valves, tube, pipes,
cooling jacket and injectors.
𝑝𝑑 = 𝑝𝑠 + (Δ𝑝)𝑝𝑢𝑚𝑝 = 𝑝1 + (Δ𝑝)𝑑𝑟𝑜𝑝𝑠 (2.4)
The eq. (2.4) shows that the pump discharge pressure (pd) equals the propellant pump suction
pressure (ps), see Eq. (2.5), plus the pressure rise across the pump (Δ𝑝)𝑝𝑢𝑚𝑝; for the pressure
balance, the required pump discharge pressure equals the chamber pressure (p1) plus all the
pressure drops that occur downstream of the pump: valves, tube and pipes, cooling jacket,
injectors.
The suction pressure depends on the propellant tank pressure, and can be estimated using the
Bernoulli relation:
𝑝𝑠 = 𝑝𝑡𝑎𝑛𝑘 − (0.5 ∗ 𝜌 ∗ 𝑐12) ∗ 𝐶𝑑 (2.5)
where Cd is the friction coefficient in the suction channel and valves (3).
To avoid cavitation phenomena the suction pressure must be higher than the vapor pressure in
the pump inlet section.
Page 35
_________________________________________________________ 2.4 Pump parameters
29
Manometric head - H [m]
The Manometric head represent the pressure increase generated by the pump between discharge
and suction. It can be expressed as
∆𝐻 =𝑝𝑑−𝑝𝑠
𝜌 ∗ 𝑔+ 𝑌𝑠 + 𝑌𝑑 (2.6)
where Ys and Yd are the friction losses in the channels before and after the pump
Net positive suction head – NPSH [m]
The NPSH can be divided into two type: the required NPSH (NPSHr) and the available NPSH
(NPSHa). Both are pressure measurement expressed in meters.
The NPSHr is the limit value of the head at the pump inlet that allows to avoid cavitation
phenomena (see section 2.1.1). It is necessary to have this pressure at the inlet because every
pump generates a pressure drop at the entrance of the impeller vanes. Therefore, all pump
systems must maintain a positive suction pressure to overcome this pressure drop. The NPSHr
depends upon the pump design and the working-fluid.
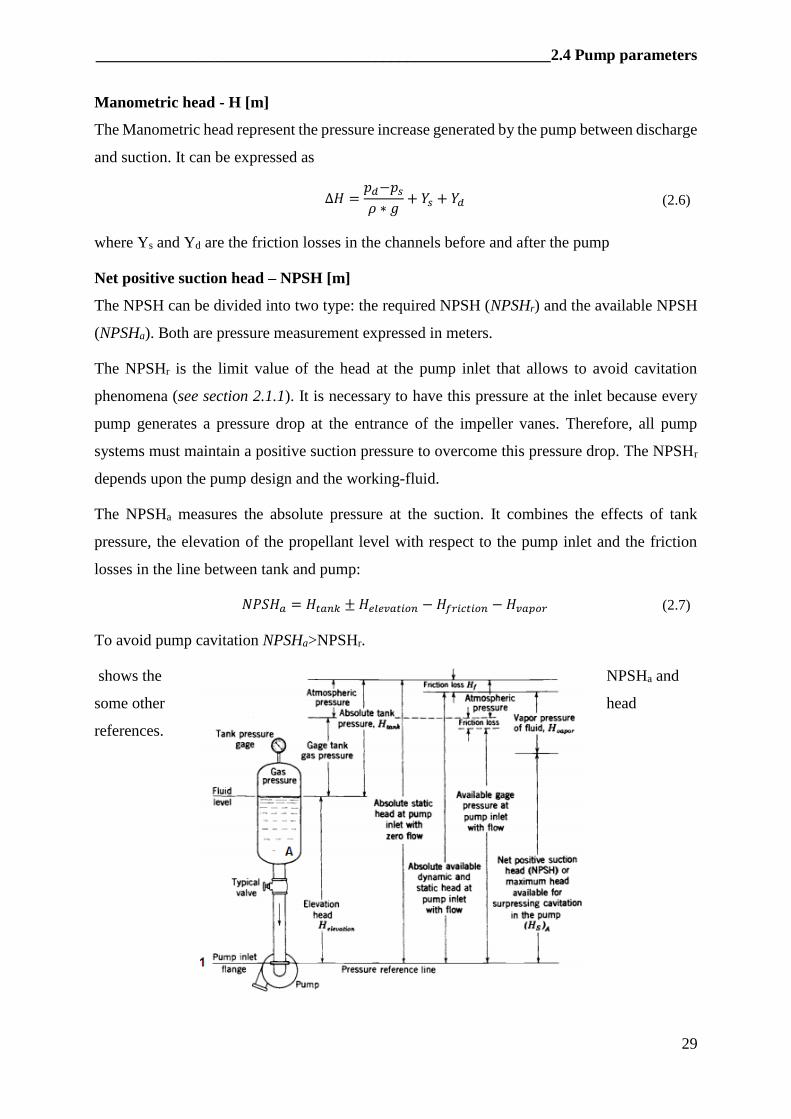
The NPSHa measures the absolute pressure at the suction. It combines the effects of tank
pressure, the elevation of the propellant level with respect to the pump inlet and the friction
losses in the line between tank and pump:
𝑁𝑃𝑆𝐻𝑎 = 𝐻𝑡𝑎𝑛𝑘 ± 𝐻𝑒𝑙𝑒𝑣𝑎𝑡𝑖𝑜𝑛 − 𝐻𝑓𝑟𝑖𝑐𝑡𝑖𝑜𝑛 − 𝐻𝑣𝑎𝑝𝑜𝑟 (2.7)
To avoid pump cavitation NPSHa>NPSHr.
shows the NPSHa and
some other head
references.
Page 36
Chapter 2 __________________________________________________________________
30
Let us make some
consideration in order to determine the NPSH from a theoretical point of view.
By applying the generalized Bernoulli’s equation between the tank and the pump inlet (which
is the point of minimum pressure) we obtain:
−𝐿𝑤 =𝑝1 − 𝑝𝐴
𝜌+
𝑐12
2+ 𝑔(𝑧1 − 𝑧𝐴) (2.8)
In writing Eq. (2.8) we have neglected the fluid velocity in the tank and we have used Lw to
denote the head loss that occurs in the line between tank and pump.
Calling Helev = g(z1-za) the fluid level – pump inlet head, we can rearrange the Equation (2.8)
as:
𝑝1 = 𝑝𝐴 − 𝛾𝐿𝑤 − 𝜌𝑐1
2
2− 𝛾𝐻𝑒𝑙𝑒𝑣 (2.9)
where γ = ρ*g is the specific weight, defined as weight per unit of volume [N/m3].
If we want to be more accurate, we should consider that around the impeller blades there are
some areas where pressure is lower than p1. To account for this, we can subtract a ∆p to the p1,
obtaining equation (2.10).
𝑝1 = 𝑝𝐴 − 𝛾𝐿𝑤 − 𝜌𝑐1
2
2− 𝛾𝐻𝑒𝑙𝑒𝑣 − Δ𝑝 (2.10)
To avoid cavitation, the pressure at the pump inlet p1 must be higher than the vapor pressure pv
of the fluid at the fluid temperature.
We can rearrange the equation (2.10) into equation (2.11) by separating the system
characteristic (NPSHa) from the pump characteristic (NPSHr)
𝑁𝑃𝑆𝐻𝑎 =𝑝𝐴 − 𝑝𝑣
𝛾− 𝐿𝑤 − 𝐻𝑒𝑙𝑒𝑣 >
𝜌𝑐12
2𝛾+
Δ𝑝
𝛾= 𝑁𝑃𝑆𝐻𝑟 (2.11)
Suction specific speed – S
The suction specific speed can be defined by the equation (2.12), where Nr is the number of
revolutions per seconds, or by the equation (2.13), where ω is the angular velocity expressed in
radians per seconds.
𝑆 =𝑁𝑟√𝑄
(𝑔 ∗ 𝑁𝑃𝑆𝐻𝑟)3/4 (2.12)
Figure 2- 9 Definition of pump net positive suction
Page 37
_________________________________________________________ 2.4 Pump parameters
31
𝑆 =𝜔√𝑄
(𝑔 ∗ 𝑁𝑃𝑆𝐻𝑟)3/4 (2.13)
When using the number of revolutions per second, the suction specific speed ranges between
1.8 and 2.4 for axial turbopumps, and between 2.5 and 3 for centrifugal turbopumps (3).
When using the angular velocity S ranges between 14 and 24.
In both equations (2.12) and (2.13) NPSHr is the required net positive suction head, therefore
knowing the suction specific speed, the volumetric flow and the impeller speed, we can
determine the NPSHr.
Specific speed – Ns
The pump specific speed is a characteristic value typically defined at the point of maximum
efficiency, which is usually the design point (4). It is defined as:
𝑁𝑠 =𝜔√𝑄
(gΔ𝐻)3/4 (2.14)
where ω is the pump rotating speed (radians per second), Q is the pump flow rate (m3/s) and
∆H is the pump head (m).
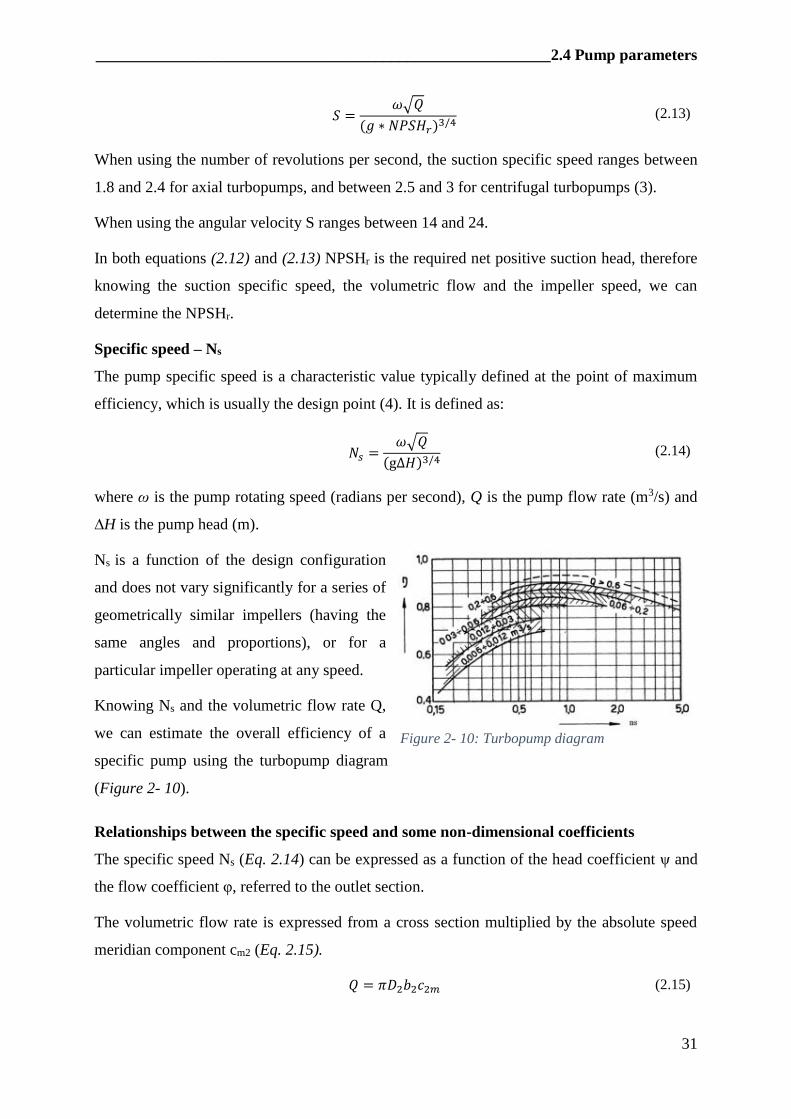
Ns is a function of the design configuration
and does not vary significantly for a series of
geometrically similar impellers (having the
same angles and proportions), or for a
particular impeller operating at any speed.
Knowing Ns and the volumetric flow rate Q,
we can estimate the overall efficiency of a
specific pump using the turbopump diagram
(Figure 2- 10).
Relationships between the specific speed and some non-dimensional coefficients
The specific speed Ns (Eq. 2.14) can be expressed as a function of the head coefficient ψ and
the flow coefficient φ, referred to the outlet section.
The volumetric flow rate is expressed from a cross section multiplied by the absolute speed
meridian component cm2 (Eq. 2.15).
𝑄 = 𝜋𝐷2𝑏2𝑐2𝑚 (2.15)
Figure 2- 10: Turbopump diagram
Page 38
Chapter 2 __________________________________________________________________
32
The discharge flow coefficient is defined as:
𝜑2 =𝑐2𝑚
𝑢2 (2.16)
We can replace 𝑐𝑚2 in the Eq. (2.15) with a function of 𝜑 and 𝑢2:
𝑄 = 𝜑𝜋𝐷2𝑏2𝑢2 (2.17)
Replacing Equation (2.17) into Equation (2.14) we obtain
𝑁𝑠 =𝜔√𝜑𝜋𝐷2𝑏2𝑢2
(𝑔Δ𝐻)3/4 (2.18)
The angular velocity ω can be written as:
𝜔 =2 ∗ 𝑢2
𝐷2 (2.19)
Substituting the (2.19) in the (2.18) we obtain Equation (2.20).
𝑁𝑠 =2√𝜋𝐷2𝑏2
𝐷2
𝑢23/2
(𝑔Δ𝐻)3/4𝜙1/2 = 2√𝜋√
𝑏2
𝐷2(
𝑢22
𝑔Δ𝐻)
3/4
𝜑1/2 (2.20)
By definition, the head coefficient equals to:
𝜓 =𝑔Δ𝐻
𝑢22 (2.21)
Substituting the (2.21) into the (2.20) we obtain:
𝑁𝑠 = 2√𝜋√𝑏2
𝐷2
𝜑1/2
𝜓3/4 (2.22)
Equation (2.22) express the specific speed as a function of the ratio 𝑏2
𝐷2 and the flow and head
coefficients.
For pumps typically used for liquid rocket engines, the values of flow coefficients are:
- Inlet flow coefficient (𝑢𝑒= impeller eye velocity):
- Discharge flow coefficient (𝑢2=impeller tip speed, usually between 182.88 and 609.6
[m/s])
𝜑1
=𝑐1𝑚
𝑢𝑒
= 0.08 ÷ 0.4 (2.23)
𝜑2 =𝑐2𝑚
𝑢2= 0.05 ÷ 0.3 (2.24)
Page 39
_________________________________________________________ 2.4 Pump parameters
33
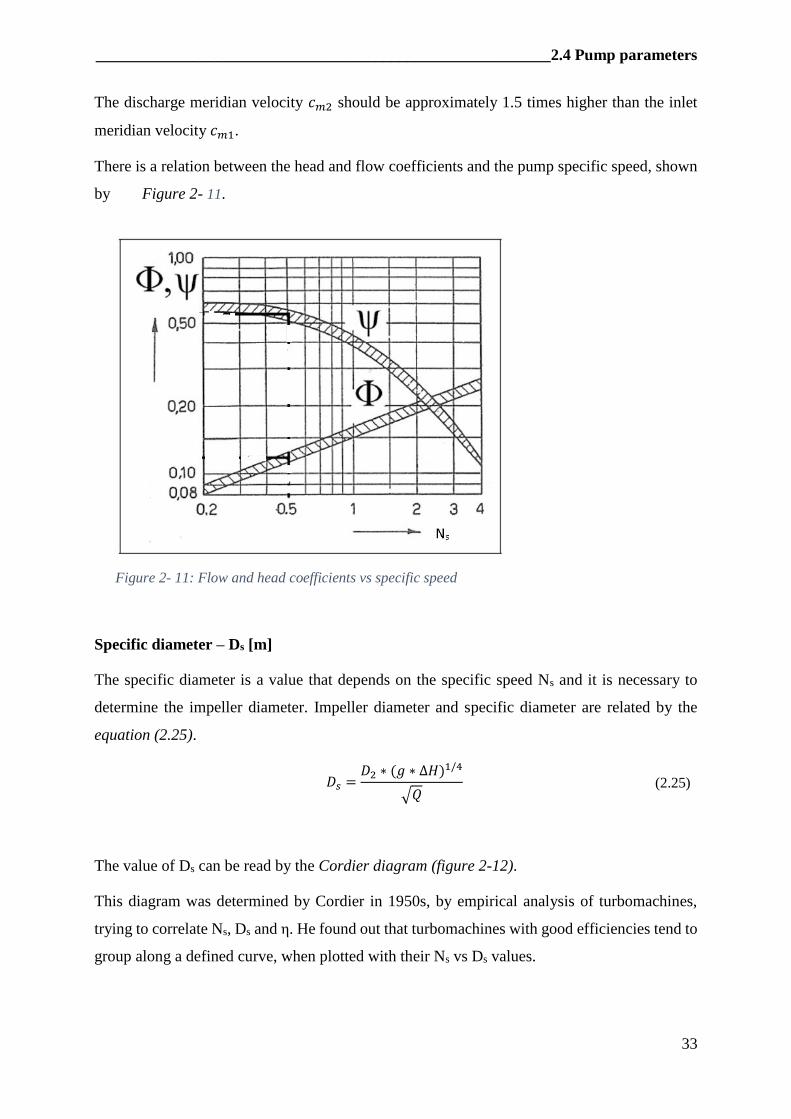
The discharge meridian velocity 𝑐𝑚2 should be approximately 1.5 times higher than the inlet
meridian velocity 𝑐𝑚1.
There is a relation between the head and flow coefficients and the pump specific speed, shown
by Figure 2- 11.
Figure 2- 11: Flow and head coefficients vs specific speed
Specific diameter – Ds [m]
The specific diameter is a value that depends on the specific speed Ns and it is necessary to
determine the impeller diameter. Impeller diameter and specific diameter are related by the
equation (2.25).
𝐷𝑠 =𝐷2 ∗ (𝑔 ∗ Δ𝐻)1/4
√𝑄 (2.25)
The value of Ds can be read by the Cordier diagram (figure 2-12).
This diagram was determined by Cordier in 1950s, by empirical analysis of turbomachines,
trying to correlate Ns, Ds and η. He found out that turbomachines with good efficiencies tend to
group along a defined curve, when plotted with their Ns vs Ds values.
Page 40
Chapter 2 __________________________________________________________________
34
He further found that machines with low
efficiency were found far away from the ones
with good efficiency in the diagram (5).
The curve on the diagram represent the value
of Ds optimized to have a pump efficiency of
90%. The value of Ds far from the curve
represent machines with lower efficiency.
Impeller diameter – D2 [m]
Knowing the specific diameter we can determine the impeller diameter D2 by the Equation
(2.25) as:
𝐷2 =𝐷𝑠√𝑄
(g ∗ Δ𝐻)1/4 (2.26)
If the impeller diameter is not acceptable, we must change the specific diameter, so the input
parameter of the Cordier diagram Ns.
An alternative method to determine the impeller diameter passing through the determination of
the impeller tip speed. The tangential velocity (u2) can be determined by the equation (2.27).
𝑢2 = √𝑔 ∗ 𝐻
𝜓 (2.27)
Where ψ is the head coefficient that take into account the impeller losses. Typical values of ψ
for centrifugal pumps are 0.4 – 0.7 (6), in particular 0.6 – 0.7 for pumps which works with low
density fluids (LH2). For centrifugal pumps ψ is determined by equation (2.21).
Knowing u2, the impeller diameter is defined by the equation (2.28).
Figure 2- 12: Cordier diagram
Page 41
_________________________________________________________ 2.4 Pump parameters
35
𝐷2 =2 ∗ 𝑢2
𝜔 (2.28)
The impeller speed is limited by the design material strength to about 610 m/s. With titanium
(lower density than steel) and machined cantilevered impellers a speed of over 655 m/s (2). For
cast impellers this limiting value is lower than for machined impellers. Consequently, once we
have determined the impeller diameter and velocity, we have to verify if the stress acting on the
impeller is lower than the material admissible stress.
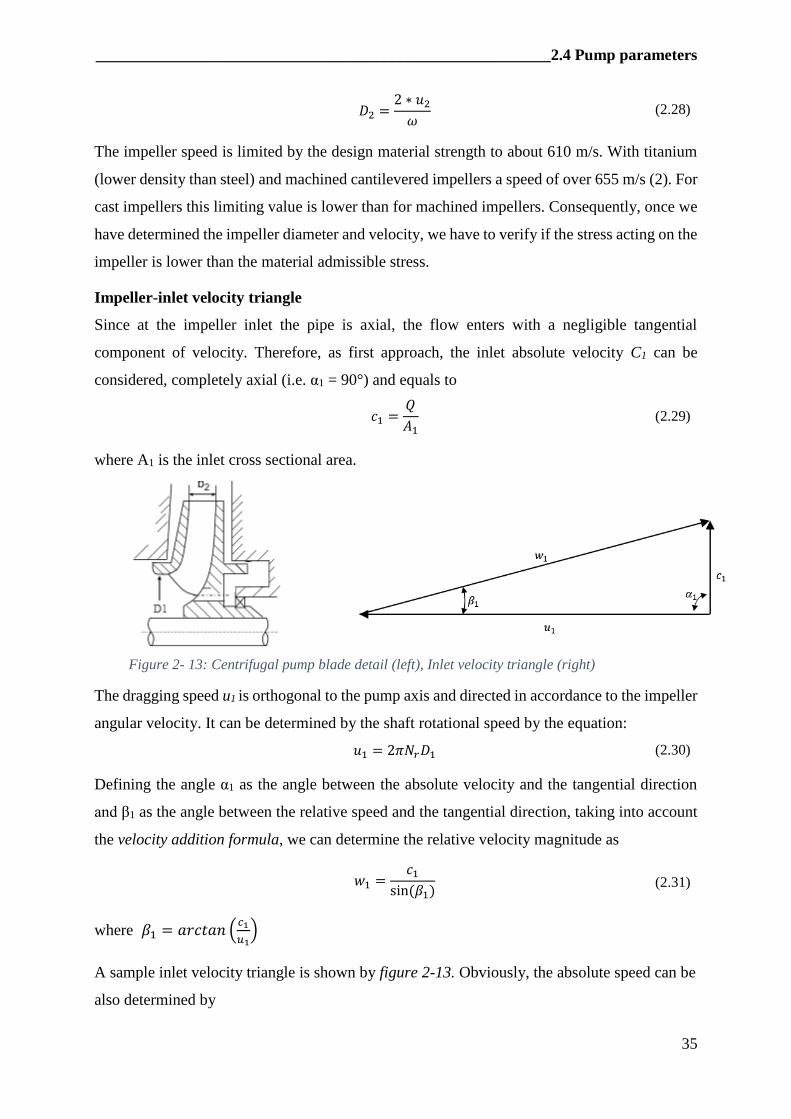
Impeller-inlet velocity triangle
Since at the impeller inlet the pipe is axial, the flow enters with a negligible tangential
component of velocity. Therefore, as first approach, the inlet absolute velocity C1 can be
considered, completely axial (i.e. α1 = 90°) and equals to
𝑐1 =𝑄
𝐴1 (2.29)
where A1 is the inlet cross sectional area.
The dragging speed u1 is orthogonal to the pump axis and directed in accordance to the impeller
angular velocity. It can be determined by the shaft rotational speed by the equation:
𝑢1 = 2𝜋𝑁𝑟𝐷1 (2.30)
Defining the angle α1 as the angle between the absolute velocity and the tangential direction
and β1 as the angle between the relative speed and the tangential direction, taking into account
the velocity addition formula, we can determine the relative velocity magnitude as
𝑤1 =𝑐1
sin (𝛽1) (2.31)
where 𝛽1 = 𝑎𝑟𝑐𝑡𝑎𝑛 (𝑐1
𝑢1)
A sample inlet velocity triangle is shown by figure 2-13. Obviously, the absolute speed can be
also determined by
Figure 2- 13: Centrifugal pump blade detail (left), Inlet velocity triangle (right)
Page 42
Chapter 2 __________________________________________________________________
36
𝑐1 = 𝑢1 ∗ tan (𝛽1) (2.32)
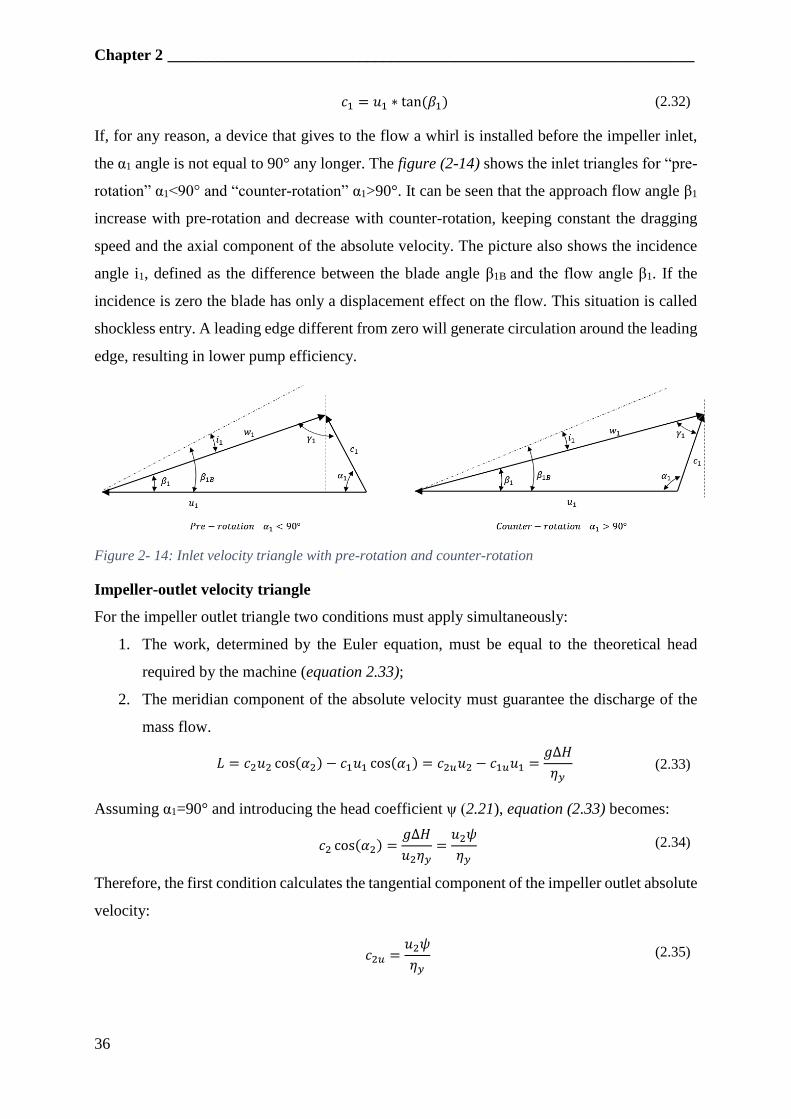
If, for any reason, a device that gives to the flow a whirl is installed before the impeller inlet,
the α1 angle is not equal to 90° any longer. The figure (2-14) shows the inlet triangles for “pre-
rotation” α1<90° and “counter-rotation” α1>90°. It can be seen that the approach flow angle β1
increase with pre-rotation and decrease with counter-rotation, keeping constant the dragging
speed and the axial component of the absolute velocity. The picture also shows the incidence
angle i1, defined as the difference between the blade angle β1B and the flow angle β1. If the
incidence is zero the blade has only a displacement effect on the flow. This situation is called
shockless entry. A leading edge different from zero will generate circulation around the leading
edge, resulting in lower pump efficiency.
Figure 2- 14: Inlet velocity triangle with pre-rotation and counter-rotation
Impeller-outlet velocity triangle
For the impeller outlet triangle two conditions must apply simultaneously:
1. The work, determined by the Euler equation, must be equal to the theoretical head
required by the machine (equation 2.33);
2. The meridian component of the absolute velocity must guarantee the discharge of the
mass flow.
𝐿 = 𝑐2𝑢2 cos(𝛼2) − 𝑐1𝑢1 cos(𝛼1) = 𝑐2𝑢𝑢2 − 𝑐1𝑢𝑢1 =𝑔Δ𝐻
𝜂𝑦 (2.33)
Assuming α1=90° and introducing the head coefficient ψ (2.21), equation (2.33) becomes:
𝑐2 cos(𝛼2) =𝑔Δ𝐻
𝑢2𝜂𝑦=
𝑢2𝜓
𝜂𝑦 (2.34)
Therefore, the first condition calculates the tangential component of the impeller outlet absolute
velocity:
𝑐2𝑢 =𝑢2𝜓
𝜂𝑦 (2.35)
Page 43
_________________________________________________________ 2.4 Pump parameters
37
The second condition, under the assumption of uniform speed on the cross section at the
impeller outlet, immediately defines the meridian component of the absolute velocity (2.36),
directly from the definition of flow coefficient (2.16)
𝑐2𝑚 = 𝜑 ∗ 𝑢2 (2.36)
Being known the absolute speed components, it is possible to determine the absolute speed
magnitude (2.37)
𝑐2 = √𝑐2𝑚2 + 𝑐2𝑢
2 (2.37)
The angle β2 can be determined by:
𝛽2 = 𝑎𝑟𝑐𝑡𝑎𝑛 (𝑐2𝑚
𝑢2 − 𝑐2𝑢) (2.38)
The tangent of α2 equals to:
tan (𝛼2) =𝑐2𝑚
𝑐2𝑢=
𝜑 ∗ 𝑢2
𝜓 ∗ 𝑢2𝜂𝑦
=𝜑
𝜓𝜂𝑦
(2.39)
Therefore
𝛼2 = arctan (𝑐𝑚2
𝑐𝑢2) = 𝑎𝑟𝑐𝑡𝑎𝑛 (
𝜑
𝜓𝜂𝑦
) (2.40)
It easy to see the validity of equations (2.38), (2.39) and (2.40) from figure 2-15.
Figure 2- 15: Impeller outlet velocity triangle
To complete the outlet velocity triangle the only remaining data necessary is the relative
velocity, which can be determined by the absolute and the tangential velocity (2.41)
𝑤2 = √(𝑐22 + 𝑢2
2) − [2𝑢2𝑐2 cos(𝛼2)] (2.41)
It is now possible to determine the two impeller outlet components:
Page 44
Chapter 2 __________________________________________________________________
38
- The meridian component w2m coincides with c2m
𝑤2𝑚 = 𝑐2𝑚 = 𝑤2sin (𝛼2) (2.42)
- The tangential component w2u
𝑤2𝑢 = 𝑤2cos (𝛼2) (2.43)
or
𝑤2𝑢 = 𝑢2 − 𝑐2𝑢 = 𝑢2 − 𝑐2cos (𝛼2) (2.44)
Another relation to determine the β2 angle is:
β2 = 𝑎𝑟𝑐𝑡𝑎𝑛 (𝑤2𝑚
𝑤2𝑢) (2.45)
Since the relative speed w2 is inclined at the angle β2, it can be written as
𝑤2 =𝑢2 − 𝑐2𝑢
cos (𝛽2) (2.46)
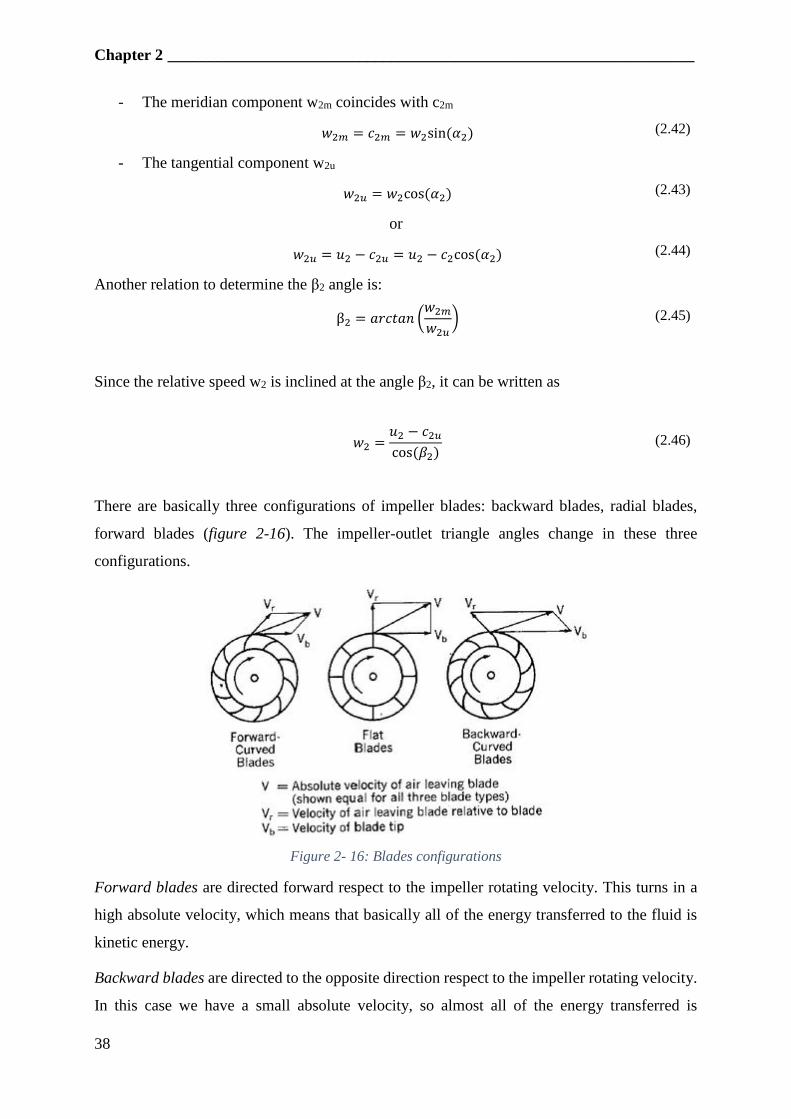
There are basically three configurations of impeller blades: backward blades, radial blades,
forward blades (figure 2-16). The impeller-outlet triangle angles change in these three
configurations.
Figure 2- 16: Blades configurations
Forward blades are directed forward respect to the impeller rotating velocity. This turns in a
high absolute velocity, which means that basically all of the energy transferred to the fluid is
kinetic energy.
Backward blades are directed to the opposite direction respect to the impeller rotating velocity.
In this case we have a small absolute velocity, so almost all of the energy transferred is
Page 45
_________________________________________________________ 2.4 Pump parameters
39
transformed in pressure. Backward-blades impeller are more often used, because they have a
higher efficiency and prevent boundary layer separation.
Blade numbers - z
The number of blades (z) needed to have an efficient impeller can be estimated by a simple
empirical relation (3)
𝑧 = 2 ∗ 𝑘 ∗𝑅𝑠
𝑙𝑏∗ sin (𝛽𝑚) (2.47)
Where lb is the blades length expressed in meters (2.48), Rs is the mean radius expressed in
meters (2.49), βm is the average angle (2.50) and k is a coefficient that depends on the pump
architecture (k=6.5 for centrifugal pumps; k=4.5 for axial pumps).
𝑙𝑏 =𝐷2 − 𝐷1
2 (2.48)
𝑅𝑠 =
𝐷2 + 𝐷1
4
(2.49)
𝛽𝑚 =
𝛽1 + 𝛽2
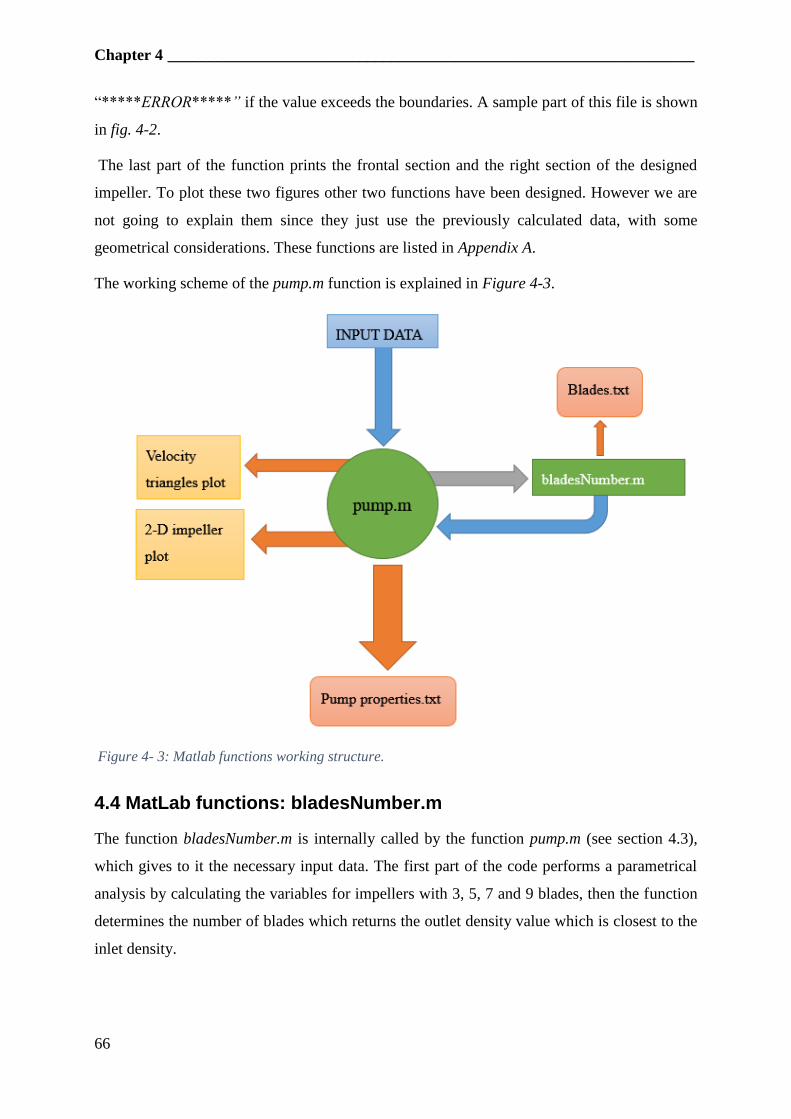
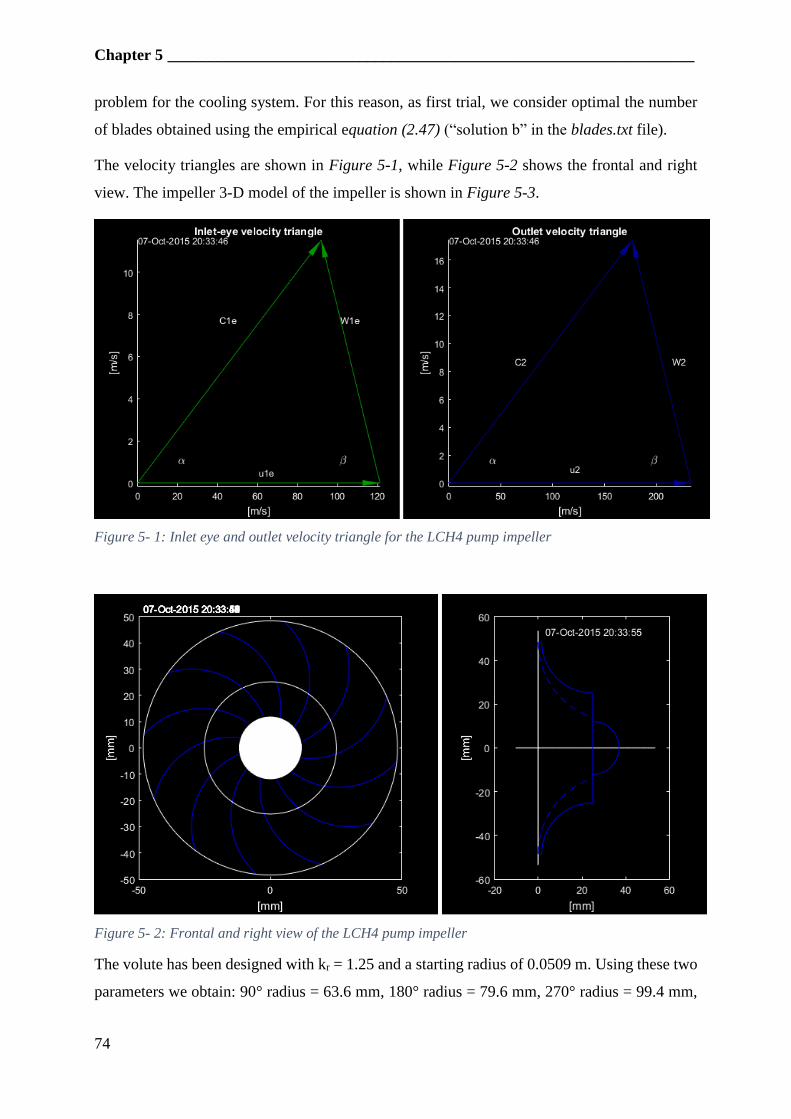
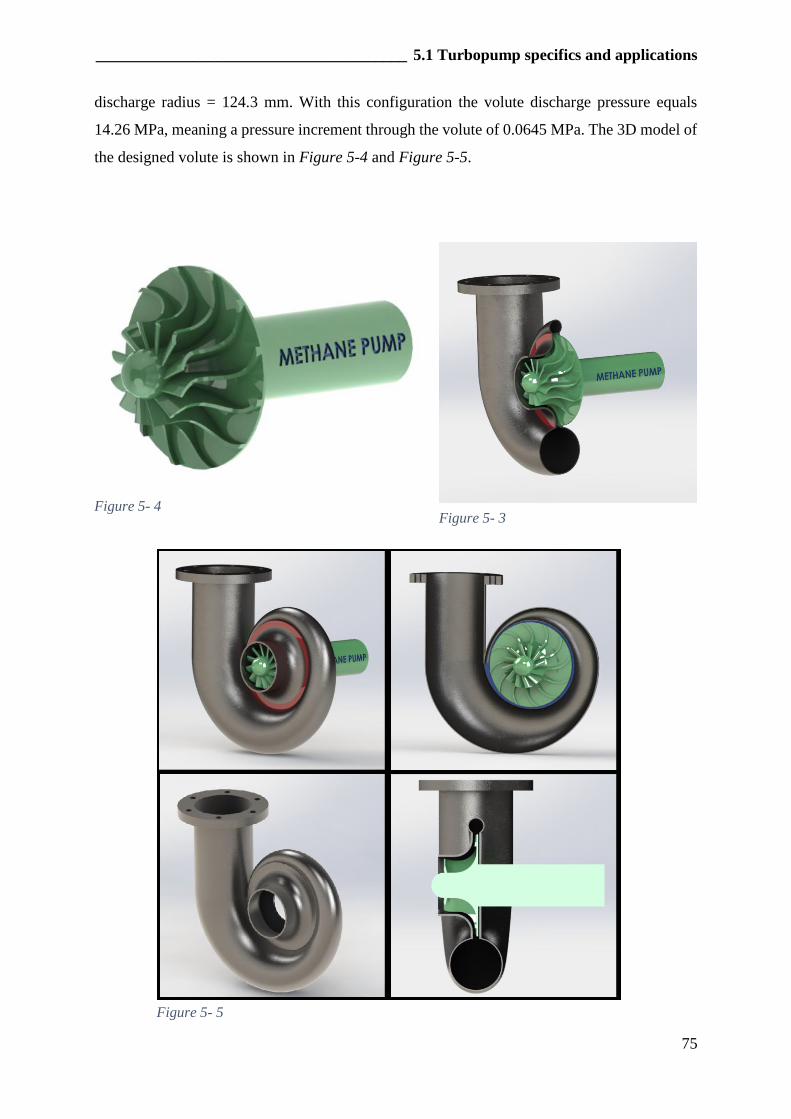
2
(2.50)
Total pump efficiency - 𝜼𝒑
The total efficiency of a pump can be seen as the product of three efficiencies (2.51):
𝜂𝑝 = 𝜂𝑦𝜂𝑣𝜂𝑇𝑟 (2.51)
- 𝜂𝑦 hydraulic efficiency. The hydraulic efficiency depends on the specific speed and on
the machine architecture. It also depends on the Reynolds number and on the roughness
of the impeller surface. [Typical values between 0.7 and 0.96].
- 𝜂𝑣 volumetric efficiency. The volumetric efficiency is defined as the ratio of the outlet
flow rate delivered by the pump and the theoretical discharge flow rate produced by the
pump (i.e. the inlet flow rate). It gives an esteem of the flow loss due to leakage of the
fluid through the pump. [Typical values between 0.85 and 0.97]
- 𝜂𝑇𝑟 transmission efficiency. The transmission efficiency considers the losses between
the pump and the turbine, due to bearings, gears and any other moving part. [Typical
values between 0.88 and 0.97]
Page 46
Chapter 2 __________________________________________________________________
40
2.5 Pump design methods
2.5.1 Method 1
The input parameter is the number of rotation per minute Nr [rpm]. The choice of Nr depends
on the propellant density.
The first step is calculate the angular velocity ω[𝑟𝑎𝑑
𝑠], as shown by equation (2.52).
ω =2 ∗ 𝜋 ∗ 𝑛
60 (2.52)
Then we calculate the volumetric flow rate Q and the head H.
It is now possible to calculate the specific speed Ns, consequently it is possible to read on the
Cordier diagram the specific diameter Ds that makes the pump work with a good efficiency.
From the specific diameter we can calculate the outlet diameter D2
𝐷2 =𝐷𝑠√𝑄
(g ∗ Δ𝐻)1/4 (2.53)
Knowing the outlet diameter the impeller tip speed is equal to
𝑢2 =𝐷2 ∗ 𝑁0
2 (2.54)
The power absorbed [W] by the pumps is determined by equations (2.55) and (2.56)
respectively for oxidizer and fuel pump.
(𝑃𝑎)𝑜𝑥 =(��)𝑜𝑥 ∗ [(𝑝𝑑)𝑜𝑥 − (𝑝𝑠)𝑜𝑥]
𝜌𝑜𝑥 ∗ 𝜂𝑜𝑥 (2.55)
(𝑃𝑎)𝑓 =(��)𝑓 ∗ [(𝑝𝑑)𝑓 − (𝑝𝑠)𝑓]
𝜌𝑓 ∗ 𝜂𝑓 (2.56)
Knowing the suction specific speed S we can determine the required NPSHr [m] by the equation
(2.57), which directly comes from eq. (2.13).
𝑁𝑃𝑆𝐻𝑟 =
1
(𝑔 ∗𝑆
ω ∗ 𝑄0.5)1.33
(2.57)
- S = 1.8 ~ 2.3 Axial turbopumps;
- S = 2.5 ~ 3 Radial turbopumps;
While the NPSHa [m] is equals to
Page 47
_____________________________________________________ 2.5 Pump design methods
41
𝑁𝑃𝑆𝐻𝑎 =𝑝𝑠 − 𝑝𝑣
𝜌 ∗ 𝑔 (2.58)
2.5.2 Method 2
The input parameters are: volumetric flow Q, Manometric head H, specific speed Ns, suction
specific speed S.
The first step is to calculate the specific angular velocity ω
ω =𝑁𝑠 ∗ (𝑔 ∗ 𝐻)3/4
√𝑄 (2.59)
The impeller tip speed u2 [m/s] is obtained by the pump coefficient ψ
𝑢2 = √𝑔 ∗ 𝐻
𝜓 (2.60
The cavitation verification is the same as the previous method. In this case
𝑁𝑃𝑆𝐻𝑟 =
1
(𝑔 ∗𝑆
𝑁0𝑠 ∗ 𝑄0.5)1.33
(2.61)
Where S = 15~24
𝑆 =𝑁0𝑠 ∗ √𝑄
(𝑔 ∗ 𝑁𝑃𝑆𝐻𝑟)3/4 (2.62)
The suction diameter (in meters) can be calculated by equation (2.63).
𝐷1 = (
8𝑄𝜋⁄
𝜑𝑖𝑛 ∗ 𝑁0𝑠 ∗ (1 − 𝜈2))
1/3
(2.63)
Where
- φin= flow coefficient, generally equals to 0.1 for the suction section
- ν = shaft diameter – suction diameter ratio, usually between 0.20 and 0.35
The powers can be calculated by [W]
(𝑃𝑎)𝑜𝑥 =��𝑜𝑥 ∗ 𝑔 ∗ 𝐻𝑜𝑥
𝜂𝑜𝑥 (2.64)
(𝑃𝑎)𝑓 =��𝑓 ∗ 𝑔 ∗ 𝐻𝑓
𝜂𝑓 (2.65)
Respectively for oxidizer and fuel pump.
Page 48
Chapter 2 __________________________________________________________________
42
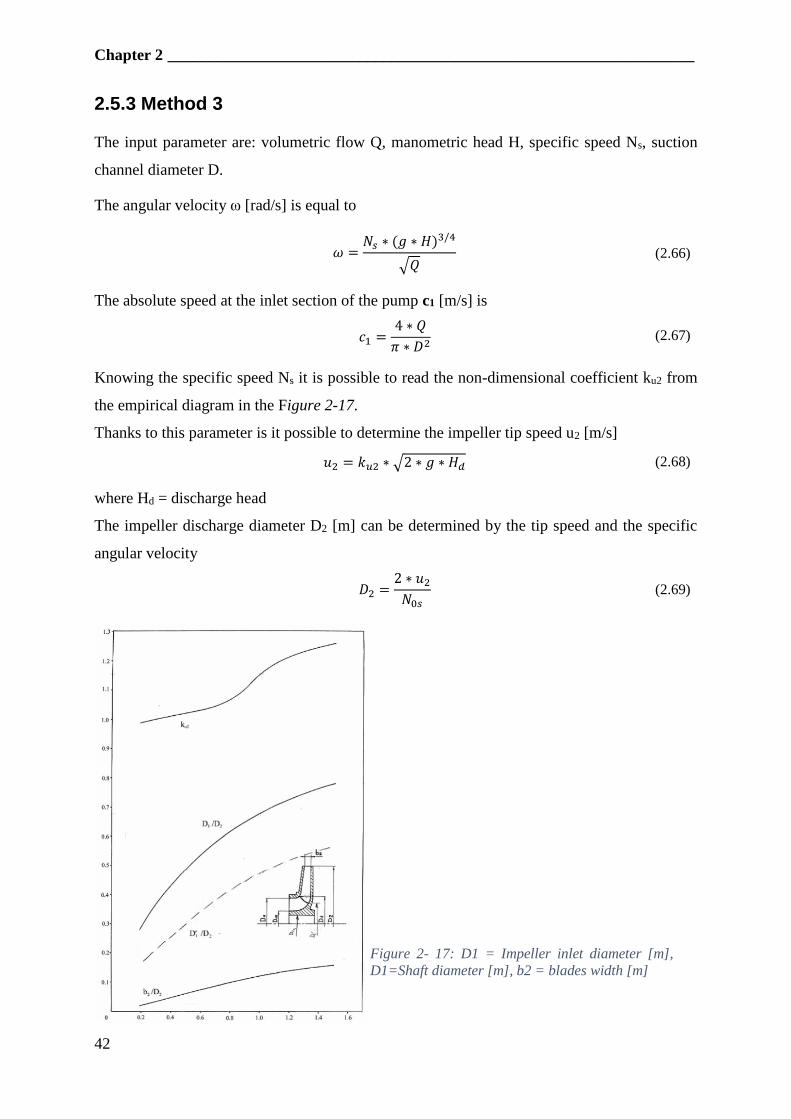
2.5.3 Method 3
The input parameter are: volumetric flow Q, manometric head H, specific speed Ns, suction
channel diameter D.
The angular velocity ω [rad/s] is equal to
𝜔 =𝑁𝑠 ∗ (𝑔 ∗ 𝐻)3/4
√𝑄 (2.66)
The absolute speed at the inlet section of the pump c1 [m/s] is
𝑐1 =4 ∗ 𝑄
𝜋 ∗ 𝐷2 (2.67)
Knowing the specific speed Ns it is possible to read the non-dimensional coefficient ku2 from
the empirical diagram in the Figure 2-17.
Thanks to this parameter is it possible to determine the impeller tip speed u2 [m/s]
𝑢2 = 𝑘𝑢2 ∗ √2 ∗ 𝑔 ∗ 𝐻𝑑 (2.68)
where Hd = discharge head
The impeller discharge diameter D2 [m] can be determined by the tip speed and the specific
angular velocity
𝐷2 =2 ∗ 𝑢2
𝑁0𝑠 (2.69)
Figure 2- 17: D1 = Impeller inlet diameter [m],
D1=Shaft diameter [m], b2 = blades width [m]
Page 49
____________________________________________________________ 2.6 Volute design
43
To determine the blade outlet angle we prescribe:
- ηv = volumetric efficiency (between 0.90 and 0.97)
- ψ2 = adimensional coefficient which consider blades volume, generally equal to 0.95
The discharge speed c2 [m/s] is equal to
𝑐2 =𝑄
𝜋 ∗ 𝐷2 ∗ 𝑏2 ∗ 𝜓2 ∗ 𝜂𝑣 (2.70)
In conclusion the outlet blades β2 angle can be determined by equation (2.71).
𝛽2 = 𝐴𝑟𝑐𝐶𝑜𝑡 (𝑢2 − 𝑣2𝑡
𝑐2) (2.71)
where
𝑣2𝑡 =𝑔 ∗ 𝐻𝑑
𝑢2 ∗ 𝜂𝑦 (2.72)
ηy = hydraulic efficiency (0.7~0.96 for rocket engines turbopumps).
2.6 Volute design
There are several possible volute shape design. The most common are:
- Spiral volute: is the first type of volute used on centrifugal pumps. Volute casing of
constant velocity of this type are simple to design and more economical to produce
because of the open areas around the impeller periphery. They can be used on large as
well as small pumps of all specific speeds with good efficiency.
- Double volute: consists of two opposed single volute. The total throat area is the same
as the one that would be used on a comparable single volute. The hydraulic performance
is comparable to the single volute design. Tests indicate that a double volute pump will
be less efficient at the best efficiency point with respect to a single spiral volute, but
more efficient on both sides of the best efficiency point respect a single spiral volute.
Double volute should not be used in low flow pumps, because the small cross section
makes difficult manufacturing and cleaning.
- Concentric volute: several experimental studies have been carried out on this volute
type. The results have revealed that concentric volutes improve the hydraulic
performances of low head or low specific speed pumps. Specifically, pump efficiency
is improved for pumps with specific speed under 600 m/s. (7)
Page 50
Chapter 2 __________________________________________________________________
44
2.6.1 Effect of the volute design on efficiency
One of the main challenges for a pump designer is to design an efficient and durable pump.
Mainly two effects have to be taken into account: the force load on the impeller and the
hydraulic efficiency. Too high forces may cause premature failure of bearings or other
components. Low efficiency turns into higher costs in terms of power needed to drive the pump.
Small changes in volute design have been shown to affect one or both force load on the impeller
and hydraulic efficiency (8).
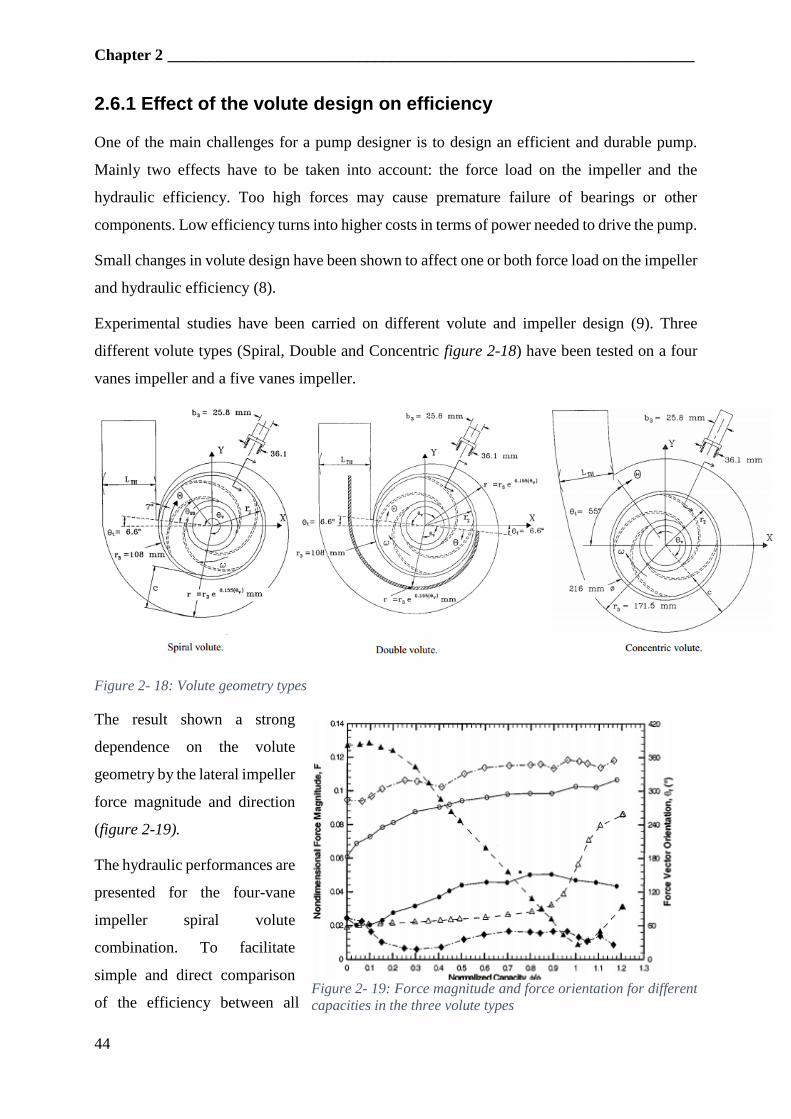
Experimental studies have been carried on different volute and impeller design (9). Three
different volute types (Spiral, Double and Concentric figure 2-18) have been tested on a four
vanes impeller and a five vanes impeller.
Figure 2- 18: Volute geometry types
The result shown a strong
dependence on the volute
geometry by the lateral impeller
force magnitude and direction
(figure 2-19).
The hydraulic performances are
presented for the four-vane
impeller spiral volute
combination. To facilitate
simple and direct comparison
of the efficiency between all Figure 2- 19: Force magnitude and force orientation for different
capacities in the three volute types
Page 51
____________________________________________________________ 2.6 Volute design
45
volute-impeller combinations, all efficiencies were normalized by the efficiency of the four-
vane impeller–spiral volute combination at the design flow, which corresponds to the BEP (Best
Efficiency Point) and hence is symbolized by η4SV,BEP ≡ ηn. Therefore, normalized efficiency
η/ηn > 1 represent an increase in hydraulic efficiency respect to the four-vane/spiral
combination. η/ηn < 1 represent a decrease in hydraulic efficiency.
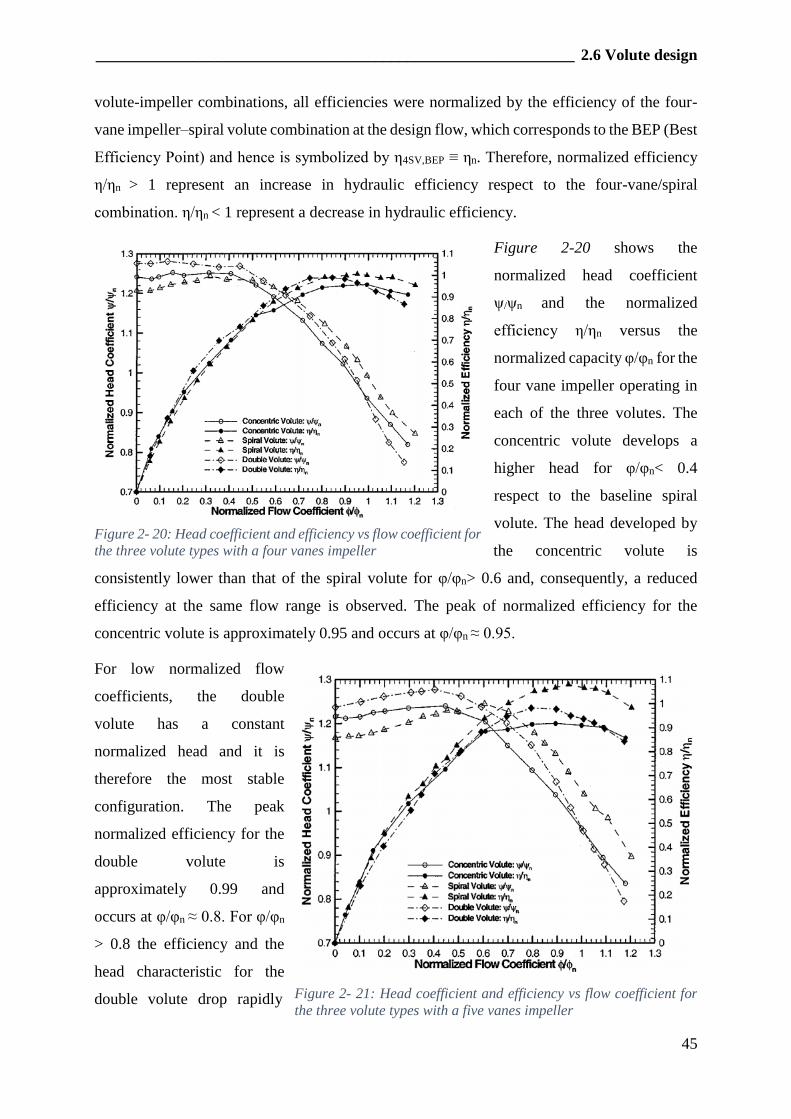
Figure 2-20 shows the
normalized head coefficient
ψ/ψn and the normalized
efficiency η/ηn versus the
normalized capacity φ/φn for the
four vane impeller operating in
each of the three volutes. The
concentric volute develops a
higher head for φ/φn< 0.4
respect to the baseline spiral
volute. The head developed by
the concentric volute is
consistently lower than that of the spiral volute for φ/φn> 0.6 and, consequently, a reduced
efficiency at the same flow range is observed. The peak of normalized efficiency for the
concentric volute is approximately 0.95 and occurs at φ/φn ≈ 0.95.
For low normalized flow
coefficients, the double
volute has a constant
normalized head and it is
therefore the most stable
configuration. The peak
normalized efficiency for the
double volute is
approximately 0.99 and
occurs at φ/φn ≈ 0.8. For φ/φn
> 0.8 the efficiency and the
head characteristic for the
double volute drop rapidly
Figure 2- 20: Head coefficient and efficiency vs flow coefficient for
the three volute types with a four vanes impeller
Figure 2- 21: Head coefficient and efficiency vs flow coefficient for
the three volute types with a five vanes impeller
Page 52
Chapter 2 __________________________________________________________________
46
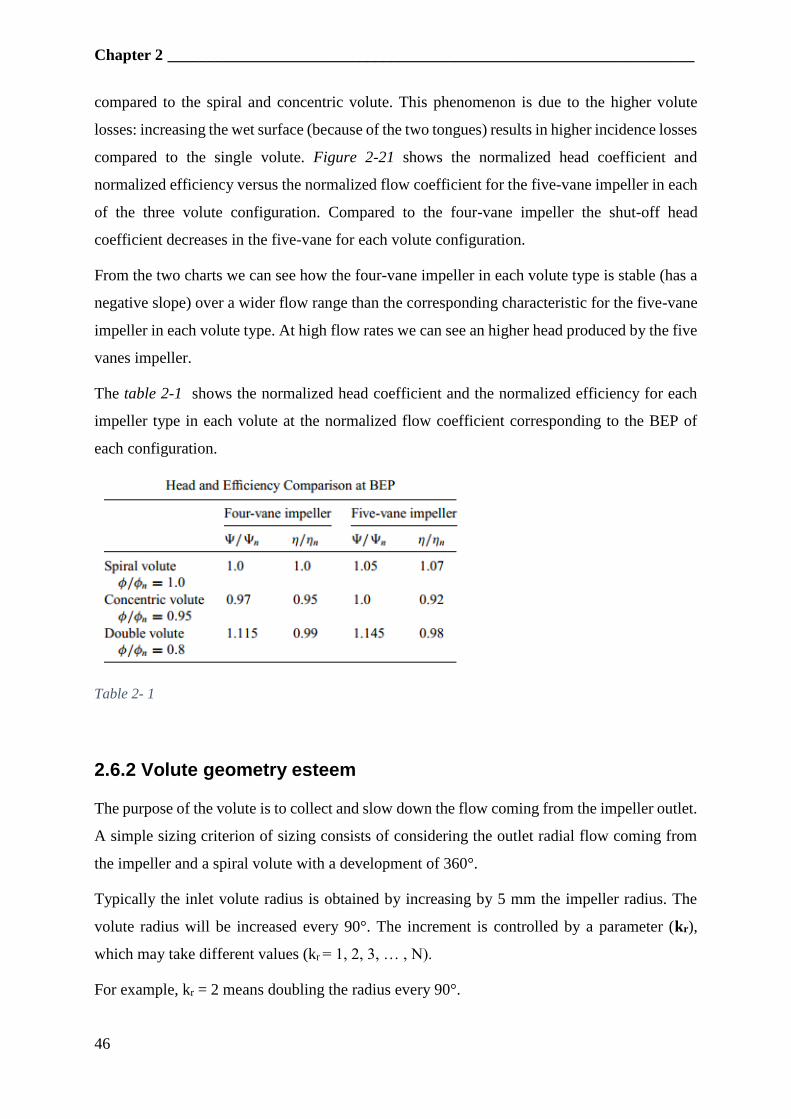
compared to the spiral and concentric volute. This phenomenon is due to the higher volute
losses: increasing the wet surface (because of the two tongues) results in higher incidence losses
compared to the single volute. Figure 2-21 shows the normalized head coefficient and
normalized efficiency versus the normalized flow coefficient for the five-vane impeller in each
of the three volute configuration. Compared to the four-vane impeller the shut-off head
coefficient decreases in the five-vane for each volute configuration.
From the two charts we can see how the four-vane impeller in each volute type is stable (has a
negative slope) over a wider flow range than the corresponding characteristic for the five-vane
impeller in each volute type. At high flow rates we can see an higher head produced by the five
vanes impeller.
The table 2-1 shows the normalized head coefficient and the normalized efficiency for each
impeller type in each volute at the normalized flow coefficient corresponding to the BEP of
each configuration.
Table 2- 1
2.6.2 Volute geometry esteem
The purpose of the volute is to collect and slow down the flow coming from the impeller outlet.
A simple sizing criterion of sizing consists of considering the outlet radial flow coming from
the impeller and a spiral volute with a development of 360°.
Typically the inlet volute radius is obtained by increasing by 5 mm the impeller radius. The
volute radius will be increased every 90°. The increment is controlled by a parameter (kr),
which may take different values (kr = 1, 2, 3, … , N).
For example, kr = 2 means doubling the radius every 90°.
Page 53
____________________________________________________________ 2.6 Volute design
47
The steps that leads, as first approach, to the volute design are:
rv0 = rimp + 0.005
rv90 = rv0*kr
rv180 = rv90*kr
rv270 = rv180*kr
rv360 = rv270*kr
The meridian velocity at the output section of the volute can be obtained from:
𝑐𝑚𝑣,𝑜𝑢𝑡 =𝑄
𝜋 ∗ 𝑟𝑣3602 (2.73)
The flow, passing through the volute, not only experiences a velocity decrease, but also a
pressure increment. Therefore the pressure at the output section of the volute will be greater
than the impeller discharge pressure (𝑝𝐷):
𝑝𝑣,𝑜𝑢𝑡 = (0.5 ∗ 𝜌 ∗ 𝑐2𝑚2 + 𝑝𝐷) − 0.5 ∗ 𝜌 ∗ 𝑐𝑚𝑣,𝑜𝑢𝑡
2 (2.74)
Consequently, the pressure increment is:
Δ𝑝𝑣 = 𝑝𝑣,𝑜𝑢𝑡 − 𝑝𝐷 (2.75)
Page 54
48
Chapter 3
Propellant turbines
3.1 Introduction
Turbines provide shaft power to the propellant pumps, taking the energy from the expansion of
a high-pressure, high-temperature gas (coming from the cooling jackets) to a lower pressure
and temperature. Turbines can be divided into two major types: impulse and reaction turbines.
Impulse turbines can be either single or multi stage. Reaction turbines are usually multi-stage.
A sample turbine is presented in Figure 3-1.
Figure 3- 1: Gas turbine general elements
Page 55
_______________________________________ 3.3 Velocity-compounded impulse turbine
49
3.2 Impulse turbines
An impulse turbine consists of a nozzle and a single rotor disk to which
are attached the turbine blades. The nozzle is a stationary element which
delivers the gas to the turbine blades. In the nozzle the gas pressure is
converted into kinetic energy, with a consequent drop of pressure. The
maximum gas velocity is achieved at the nozzle-exit/blades-inlet. The
gas flowing through the turbine blades transfers its kinetic energy to the
rotor as rotational mechanical energy. Ideally, the turbine rotor works in
a constant pressure environment (neglecting the friction effects). Figure
3-2 shows the nozzle and the rotor of a single stage impulse turbine.
3.3 Velocity-compounded impulse turbine
The velocity compounded impulse turbine can be
seen as multi-stage impulse turbine, even if
technically it is considered a single stage turbine
because it involves only one pressure drop. Like the
previous type, a nozzle directs the flow through the
first rotor blades. When the flow leaves the first set
of rotor blades, the flow changes its direction. A set
of stationary blades (stator) changes again the flow
direction and directs it into the second set of rotating
blades, where the working fluid exchanges further
energy with the machine. Other stages may be placed
after the second rotor blades, in sets of stationary and
moving elements. Ideally the entire pressure drop
occurs in the stationary nozzle. The flow velocity is ideally constant through the stator and
drops through each rotor. Stator, rotor, pressure and velocity diagrams are presented in Figure
3-3.
Figure 3- 2: Single stage impulse turbine. The graphs show the
pressure drop and the velocity trend through the machine
Figure 3- 3: Single stage, two rotor,
velocity compounded impulse turbine
Page 56
Chapter 3 __________________________________________________________________
50
3.4 Reaction turbine
Unlike the impulse turbines, in reaction turbines the working fluid experiences a pressure drop
while it passes through the rotating blades, as shown in Figure 3-4. The energy transferred to
the machine is due to a change of the working fluid momentum. In a pure reaction turbine the
driving force is totally given by the expansion of the gas, which is usually roughly equally split
between rotor and stator.
3.5 Impulse turbines design
For rocket engine application the impulse turbines are preferred, both for their simplicity and
light weight. The single stage impulse turbines are used for low-power application and they
work at high rotational speeds. For higher performances, single stage, two rotor velocity
compounded impulse turbine are used, they at lower rotational speed, since the kinetic energy
is taken by two rotors. (1)
Turbine nozzles
The turbine nozzles of most rocket engines have a convergent-divergent profile. As first
approach we can consider an isentropic nozzle expansion, which gives an ideal velocity at the
rotor inlet C0.
𝐶1𝑖𝑑 = √2 ∗ (ℎ00 − ℎ1𝑠) = √2 ∗ 𝐶𝑝 ∗ (𝑇0
0 − 𝑇1𝑠) (3.1)
Taking into account the isentropic law of expansion and the ideal gas equation, we can rewrite
the (3.1) as:
Figure 3- 4: Reaction turbine schematics
and pressure - velocity diagrams.
Page 57
___________________________________________________ 3.5 Impulse turbines design
51
𝐶1𝑖𝑑 = √2 ∗ 𝐶𝑝 ∗ 𝑇00 [ 1 − (
𝑝1
𝑝00)
𝛾−1𝛾
] (3.2)
This velocity has to be reduced in order to obtain the actual rotor inlet velocity C1. In order to
do so, we can use a nozzle velocity coefficient Kn (usually between 0.89 and 0.98 (1)), defined
as:
𝐾𝑛 =𝐶1
𝐶1𝑖𝑑 (3.3)
Therefore, the real rotor inlet velocity equals to:
𝐶1 = 𝐾𝑛 ∗ 𝐶1𝑖𝑑 = 𝐾𝑛 ∗ √2 ∗ 𝐶𝑝 ∗ 𝑇00 [ 1 − (
𝑝1
𝑝00)
𝛾−1𝛾
] (3.4)
The nozzle expansion is shown on an enthalpy-entropy diagram in Figure 3-5.
Figure 3- 5
The efficiency of a turbine nozzle is defined as the real kinetic energy at the nozzle exit divided
by the kinetic energy at the nozzle exit of an isentropic expansion, which equals to the nozzle
velocity coefficient squared, as shown by equation (3.5). It ranges from 0.80 to 0.96 (1).
𝜂𝑛 =
𝐶12
2𝑔⁄
𝐶1𝑖𝑑2
2𝑔⁄
= 𝐾𝑛2 (3.5)
While passing through the nozzle, the flow changes its direction from nearly axial to a direction
forming an α1 angle with the plane of rotation at the nozzle exit. Theoretically a better efficiency
Page 58
Chapter 3 __________________________________________________________________
52
is obtained with a small exit angle, but with the decrease of it, the flow deflection increases
causing higher frictional losses. The design values of α1 range from 15° to 30° (1).
Rotor blades
The function of the rotor blades is to transform the gas flow kinetic energy into work. Ideally
there should be no change of gas pressure, temperature or enthalpy in rotor blades, but in fact
some expansion of the gas usually occurs. Furthermore, due to the frictional losses, the velocity
at the exit of the rotor blades is lower than the velocity at the rotor blades inlet (W2<W1). This
phenomenon is taken into account using the blade velocity coefficient Kb, which is defined as
the outlet/inlet rotor blades relative velocity:
𝐾𝑏 =𝑊2
𝑊1 (3.6)
Practical values of Kb vary from 0.8 to 0.9 (1).
Figure 3-6 shows the nozzle and the rotor blades of a typical single stage impulse turbine, with
the corrisponding velocity diagrams.
Figure 3- 6: Single stage impulse turbine nozzles, rotor blades and velocity diagrams. C1=Nozzle exit
absolute velocity, V1=Nozzle exit relative velocity, U=dragging speed, C2=Rotor outlet absolute
velocity, V2=Rotor outlet relative velocity, dm=mean diameter.
Assuming as reference the rotor blades mean diameter, the dragging speed u can be determined
knowing the number of revolution per minutes (Nr) by:
𝑢 =𝜋 ∗ 𝑑𝑚 ∗ 𝑁𝑟
60 (3.7)
Page 59
___________________________________________________ 3.5 Impulse turbines design
53
The work obtained by a single stage of rotor blades, can be determined from the Euler equation,
and is equals to:
(𝐿)𝑜𝑏𝑡 = 𝑢 ∗ [𝐶1 ∗ cos(𝛼1) + 𝐶2 ∗ cos (𝛼2)] (3.8)
Using some geometrical considerations we can rewrite Eq. (3.8) as:
(𝐿)𝑜𝑏𝑡 = 𝑢 ∗ (1 + 𝐾𝑏)[𝐶1 ∗ cos(𝛼1) − 𝑢] (3.9)
The blade efficiency is defined as the work obtained divided by the kinetic energy at the rotor
blades input:
𝜂𝑏 =(𝐿)𝑜𝑏𝑡
𝐶12
2𝑔⁄
(3.10)
The power developed by the turbine can be determined as:
𝑃𝑊 = 𝜂𝑏 ∗ (𝐿)𝑜𝑏𝑡 ∗ �� (3.11)
where �� is the mass flow passing through the turbine.
Single stage, two rotor velocity compounded impulse turbine
The velocity diagrams of a two rotor velocity compounded impulse turbine are shown in Figure
3-7. The first part of this turbine works in the same way as a single rotor impulse turbine, so it
is described by the equations we have just seen above. After the first rotor blades, the flow goes
into the stator blades, where the absolute velocity of the flow passes from C2 to C3. Then the
flow passes through the second rotor blades, which work with the same principles as the first
one. The total work transferred to the blades of a two-rotor turbine is the sum of the work
transferred in each rotor. For a two-rotor impulse turbine it is equal to:
(𝐿)𝑜𝑏𝑡 = 𝑢 ∗ [𝐶1 cos(𝛼1) + 𝐶2cos (𝛼2)+𝐶3 cos(𝛼3) + 𝐶4cos (𝛼4)] (3.12)
As in the single rotor turbines, the exit velocity from any row of blades is lower than the inlet
velocity because of frictional losses. It can be assumed that the blades velocity coefficient has
the same values for any row of blades (Equation (3.12)).
𝐾𝑏 =𝑊2
𝑊1=
𝐶3
𝐶2=
𝑊4
𝑊3
(3.13)
Page 60
Chapter 3 __________________________________________________________________
54
Figure 3- 7
Page 61
55
Chapter 4
Software development
4.1 Introduction
In this chapter we will discuss the software developed to achieve a preliminary design of the
turbopump. The code has been written in MatLab language considering the theoretical
background described in the previous chapters. To determine properties of the working fluids
the CoolProp libraries have been used (version 5.1.1, exported in MatLab).
4.2 CoolProp libraries
CoolProp is an open-source database, which is intended to determine the fluid proprieties for a
particular thermodynamic condition. It has been validated against the most accurate data
available from relevant references. Many project are currently using the CoolProp libraries, and
several are the organizations and university that supports CoolProp (1).
The libraries can be used in several environments, such as: Python, Octave, C#, Java, MatLab,
FORTRAN and Microsoft Excel.
A wide variety of fluids are supported, which vary from pure and pseudo-pure fluids to many
pre-set mixture. Table (4-1) shows some of the fluids available, the full list is available on the
CoolProp official website. The list of predefined mixtures that can be obtained on MatLab with
the command line: CoolProp.get_global_param_string('predefined_mixtures') is reported in
Table 4.
LIST OF FLUIDS
Name Formula Name Formula Name Formula
1-Butene C4H8 Helium He Propylene C3H6
Acetone C3H6O1 Hydrogen H2 R134a C2F4H2
Air - Methane CH4 SulfurDioxide SO2
Benzene C6H6 Methanol CH4O Toluene C7H8
Page 62
Chapter 4 __________________________________________________________________
56
Carbon
dioxide
CO2 Nitrogen N2 Water H2O
Ethane C2H6 NitrousOxide N2O n-Heptane C7H16
Ethanol C2H6O1 Oxygen O2 n-Octane C8H18
Table 4- 1: List of part of the fluids available in CoolProp
The most common function used with the CoolProp libraries are the PropsSI function and the
PhaseSI function, which are part of the High-level interface. In both cases, SI stands for Système
International d'Unités, meaning that the input parameters must be provided in SI units and the
function returns the data in SI units.
The PropsSI function works for pure fluids, pseudo-pure fluids and mixtures (does not work
for humid air, which has a separate command). The syntax is as follow:
CoolProp.PropsSI(‘Output’, ‘Input1’, Input1 Value, ‘Input2’, Input2 Value, ‘Fluid’)
The ‘Output’ and the various ‘Input’ are strings of characters which define a particular
thermodynamic property. The complete list of the input strings can be found on CoolProp
official website (2), Table (4-2) shows some of them.
PARAMETER INPUT/OUTPUT DESCRIPTION
‘D’ / ‘DMASS’ / Dmass I/O Mass density [kg/m^3]
‘H’ / ‘HMASS’ / ‘Hmass’ I/O Mass specific enthalpy [J/kg]
‘P’ I/O Pressure [Pa]
‘Q’ I/O Mass vapour quality [mol/mol]
‘S’ / ‘SMASS’ / ‘Smass’ I/O Mass specific entropy [J/kg/K]
‘T’ I/O Temperature [K]
Page 63
________________________________________________________ 4.2 CoolProp libraries
57
‘A’ / ‘SPEED_OF_SOUND’ /
‘speed_of_sound’
O Speed of sound [m/s]
‘C’ / ‘CPMASS’ / ‘Cpmass’ O Mass specific, constant
pressure specific heat [J/kg/K]
‘0’ / ‘CVMASS’ / ‘Cvmass’ O Mass specific, constant
pressure specific heat [J/kg/K]
‘V’ / ‘VISCOSITY’ /
‘viscosity’
O Viscosity [Pa*s]
Table 4- 2: High level interface main input and output parameters
An example command could be:
% Command string (input)
CoolProp.PropsSI(‘T’, ‘P’, 101325, ‘Q’, 0, ‘Water’) % Q=0 means only vapor
% Result (output)
ans = 373.1243
For pure and pseudo-pure fluids, two thermodynamic points are required to fix the fluid state.
The equation of state that CoolProp uses are based on Temperature and Density as state
variables, so [T, D] will always be the inputs which returns the fastest results. If other inputs
are used, the function will be slower. For example, if the inputs are Pressure and Temperature
the calculation will be 3 to 10 times slower. If neither Temperature nor density are used (for
example if we use Pressure, Enthalpy) the calculation will be much slower. In this case, if speed
is an issue, it is possible to avoid the evaluation of the full equation of state using a tabular
interpolation method. These methods are basically two: Bicubic interpolation and Tabular
Taylor Series Extrapolation (TTSE). The concept behind this method is very simple: first a
table is created, then an interpolation is performed in order to find the value needed.
The PhaseSI function is useful to determine the phase of a fluid at a given state point. To obtain
the fluid phase, it is necessary to give as inputs two thermodynamic parameters and the fluid
name. The syntax is as follow:
Page 64
Chapter 4 __________________________________________________________________
58
CoolProp.PhaseSI(‘Input1’, Input1 Value, ‘Input2’, Input2 Value, ‘Fluid’)
A sample code can be:
% Command string (input)
CoolProp.PhaseSI(‘P’, 101325, ‘T’, 374, ‘Water’)
% Result (output)
ans = gas
The phase index can be obtained also using the PropsSI function:
% Command string (input)
CoolProp.PropsSI(‘Phase’, ‘P’, 101325, ‘T’, 374, ‘Water’)
% Result (output)
ans = 5
Each index corresponds to a phase. Table (4-3) shows the index-phase correlation.
Index Phase
0 Liquid
1 Supercritical (p>pc, T>Tc)
2 Supercritical gas (p<pc, T<Tc)
3 Supercritical liquid (p>pc, T<Tc)
4 At the critical point
5 gas
6 Two phase
7 Unknown phase
Table 4- 3: Phase index for PropsSI function Figure 4- 1: Water phase diagram
Page 65
________________________________________________ 4.3 MatLab functions: pump.m
59
The function we have seen until now are part of the High level interface. For more advanced
use of the CoolProp libraries, it can be useful to use the Low-level interface. This interface
allow the user to access to lower-level parts of the CoolProp code. This approach is useful
especially because it is much faster (the high level interface internally calls the low-level
interface). Furthermore, the low-level interface only operates using numerical values, which is
much faster with respect to the use of strings. Anyway, the low-level interface is much more
complex to use with respect to the high-level one.
For our concern the High-level interface is the best option.
4.3 MatLab functions: pump.m
The first MatLab function developed has been the pump.m function, which basically calculates
all the required parameter necessary to design a fuel or oxidizer pump. The function code is
shown below.
function pump() 1
disp('*************************************************'); 2
disp('***** Pump preliminary design for LRE *****'); 3
disp('*************************************************'); 4
disp('--> Input parameters'); 5
T = input('Suction temperature [K] = '); 6
PS = input('Suction pressure [Pa] = '); 7
PD = input('Discharge pressure [Pa] = '); 8
fl = input('Mass flow [kg/s] = '); 9
Ns = input('Specific speed = '); 10
H = input('Height [m] = '); 11
s = input('Suction specific speed = '); 12
ETAp = input('Total efficiency = '); 13
ETAy = input('Hydraulic efficiency = '); 14
sb = input('Blades thickness [m] = '); 15
kx = input('Eye diameter / Tip diameter ratio = '); 16
fluid = input('Working fluid = ', 's'); 17
18
whitebg('k'); %plot background color 19
set(gcf, 'color', 'k'); 20
set(gcf, 'InvertHardCopy', 'off'); 21
22
%Inlet density and vapor pressure 23
rho = CoolProp.PropsSI('D', 'T', T, 'P', PS, fluid); %density [kg/m^3] 24
pv=CoolProp.PropsSI('P', 'T', T, 'Q', 0, fluid); %inlet vapor pressure [Pa] 25
inlet_state = CoolProp.PhaseSI('P', PS, 'D', rho, fluid) 26
27
Q = fl/rho; %volumetric flow [m^3/s] 28
29
g = (6.67*10^-11*5.97*10^24)/(6378*10^3+H*10^3)^2; %gravity acceleration 30
31
Hn = (PD-PS)/(rho*g); %nominal head 32
HS = (PS-pv)/(rho*g); %suction head 33
Page 66
Chapter 4 __________________________________________________________________
60
HD = (PD-PS-pv)/(rho*g); %discharge head 34
35
Hdt = HS*0.8; %required head 36
37
PW = Q*(PD-PS)/ETAp; %power 38
omega = Ns*((g*HD)^0.75)/(Q^0.5); %angular velocity 39
torque = PW/omega; %torque 40
41
rps = omega/(2*pi); %revolutions per second 42
rpm = rps*60; %revolution per minute 43
44
%cavitatio verification 45
NPSHr = (( (omega*Q^0.5)/s)^(4/3))/g; 46
Hsc = HS-NPSHr; %anticavitation margin 47
48
%outlet velocity triangle 49
u2 = sqrt((g*HD)/(0.4/((omega*Q^0.5)/((g*HD)^0.75))^0.25)); 50
C2u = (u2*(0.4/((omega*Q^0.5)/((g*HD)^0.75))^0.25))/ETAy; 51
C2m = 52
0.1715*sqrt(((omega*Q^0.5)/(g*HD)^0.75))*(sqrt((g*HD)/(0.4/((omega*Q^0.5)/((g*HD)^0.75))^0.53
25))); 54
55
betaTip = atan(C2m/(u2-C2u)); 56
betaTipDEG = atan(C2m/(u2-C2u))*180/pi; %tipical values from 15 to 35 57
alpha2 = atan(C2m/C2u)*180/pi; 58
59
C2 = sqrt(C2m^2+C2u^2); 60
61
W2 = sqrt((C2^2+u2^2)-(2*u2*C2*cos(atan(C2m/C2u)))); 62
W2m = W2*sin(atan(C2m/(u2-C2u))); 63
W2u = W2*cos(atan(C2m/(u2-C2u))); 64
65
Dt2 = 2*(u2/omega); %tip diameter 66
67
%Head and Flow coefficient 68
PSId = (g*HD)/u2^2; %discharge head coefficient 69
PHId = C2m/u2; %discharge flow coefficient 70
71
%plot outlet velocity triangle 72
p1 = [0, 0; u2, 0; 0, 0]; 73
p2 = [u2, 0; (-W2u+u2), W2m; C2u, C2m]; 74
arrow3(p1, p2, '_b'); 75
text((u2-W2u/2)+10, W2m/2, 'W2'); 76
text(u2/2, 1, 'u2'); 77
text(C2u/2-25, C2m/2, 'C2'); 78
text(u2/6, C2m/10, '\alpha', 'FontSize', 12); 79
text(u2-u2/6, C2m/10, '\beta', 'FontSize', 12); 80
title('Outlet velocity triangle'); 81
text(0, C2m, datestr(clock)); 82
xlabel('[m/s]'); 83
ylabel('[m/s]'); 84
85
%suction section 86
D1s = kx*Dt2; %suction diameter 87
Dsh1s = (1-kx)*D1s; %shaft diameter 88
PHIs = Q/(rps*D1s^3); %suction flow coefficient 89
C1m = PHIs*(2*pi*0.5*D1s*rps); 90
CmRatio = C2m/C1m; 91
Page 67
________________________________________________ 4.3 MatLab functions: pump.m
61
D1ms = (D1s+Dsh1s)/2; %suction mean diameter 92
93
%suction mean diameter triangle 94
u1ms = (2*pi*0.5*D1ms*rps); 95
C1ums = (u1ms*(0.4/((omega*Q^0.5)/((g*HD)^0.75))^0.25))/ETAy; 96
beta1ms = atan(C1m/(u1ms-C1ums)); 97
beta1msDEG = beta1ms*180/pi; %typically from 15° to 50° 98
W1ms = (u1ms-C1ums)/cos(beta1ms); 99
100
101
%suction eye triangle 102
u1e = omega*0.5*D1s; 103
C1ue = (u1e*(0.4/((omega*Q^0.5)/((g*HD)^0.75))^0.25))/ETAy; 104
C1e = sqrt(C1m^2+C1ue^2); 105
106
beta1e = atan(C1m/(u1e-C1ue)); 107
beta1eDEG = beta1e*180/pi; 108
alpha1e = atan(C1m/C1ue)*180/pi; 109
110
W1e = (u1e-C1ue)/cos(beta1e); 111
W1ue = W1e*cos(beta1e); 112
113
%plot inlet velocity triangle (mean diameter) 114
figure 115
set(gcf, 'color', 'k'); 116
set(gcf, 'InvertHardCopy', 'off'); 117
p1 = [0, 0; u1e, 0; 0, 0]; 118
p2 = [u1e, 0; u1e-W1ue, C1m; C1ue, C1m]; 119
arrow3(p1, p2, '_g'); 120
text(u1e-20, C1m/2+2, 'W1e'); 121
text(u1e/2, 0.5, 'u1e'); 122
text(C1ue/2-5, C1m/2+2, 'C1e'); 123
text(u1e/6, C1m/10, '\alpha', 'FontSize', 12); 124
text(u1e-u1e/6, C1m/10, '\beta', 'FontSize', 12); 125
title('Inlet-eye velocity triangle'); 126
text(0, C1m, datestr(clock)); 127
xlabel('[m/s]'); 128
ylabel('[m/s]'); 129
130
%blades number optimal value 131
[Zopt, B2] = bladesNumberV3(C2m, C2u, u2, Dt2, fl, Q, PD, PS, ETAy, sb, betaTipDEG, 132
beta1msDEG, beta1eDEG, Dsh1s, fluid, rho); %blades number parametrical analisys 133
134
%inlet blades 135
kz1 = ((((pi*D1ms)/Zopt)-(sb/sin(atan(C1m/(u1ms-C1ums)))))/((pi*D1ms)/Zopt))^2; 136
%contraction factor impeller inlet 137
B1ms = Q/(pi*D1ms*C1m*kz1); 138
139
%volute design 140
kr = sqrt(2); %valute radius coefficient 141
rv0 = (Dt2+0.005)/2; %volute starting radius = impeller diam + 5mm 142
rv90 = rv0 * kr; 143
rv180 = rv90 * kr; 144
rv270 = rv180 * kr; 145
rv360 = rv270 * kr; 146
147
Avolu = pi*rv360^2; %volute discharge section 148
149
Page 68
Chapter 4 __________________________________________________________________
62
Cvolu = Q/Avolu; %Volute discharge velocity 150
151
Pvolut = (0.5*rho*C2m^2+PD)-0.5*rho*Cvolu^2; %Volute discharge pressure 152
153
DeltaPvolut = Pvolut - PD; %Volute pressure increment 154
155
%material strength 156
stress = rho * u2^2 /(1E6) %[MPa] 157
158
%save data to file 159
fileID = fopen('Pump propeties.txt', 'w'); 160
161
fprintf(fileID, '%-40s\r\n', datestr(clock)); 162
163
fprintf(fileID, '************************************************************\r\n'); 164
fprintf(fileID, '************************************************************\r\n'); 165
fprintf(fileID, '******** ********\r\n'); 166
fprintf(fileID, '******** Pump properties ********\r\n'); 167
fprintf(fileID, '******** ********\r\n'); 168
fprintf(fileID, '************************************************************\r\n'); 169
fprintf(fileID, '************************************************************\r\n\r\n'); 170
fprintf(fileID, '----------------------Input Parameters----------------------\r\n'); 171
fprintf(fileID, '%-40s %12s\r\n', 'Fluid = ', fluid); 172
fprintf(fileID, '%-40s %12.4f\r\n', 'Suction temperature T [K] = ', T); 173
fprintf(fileID, '%-40s %12.4f\r\n', 'Scution Pressure PS [Pa] = ', PS); 174
fprintf(fileID, '%-40s %12.4f\r\n', 'Mass flow fl [kg/s] = ', fl); 175
fprintf(fileID, '%-40s %12.4f\r\n', 'Discharge pressure PD [Pa] = ', PD); 176
fprintf(fileID, '%-40s %12.4f\r\n', 'Specific speed Ns = ', Ns); 177
fprintf(fileID, '%-40s %12.4f\r\n', 'Suction speed s = ', s); 178
fprintf(fileID, '%-40s %12.4f\r\n', 'Height H [m] = ', H); 179
fprintf(fileID, '%-40s %12.4f\r\n', 'Efficiency ETAp = ', ETAp); 180
fprintf(fileID, '%-40s %12.4f\r\n', 'Hydraulic efficiency ETAy = ', ETAy); 181
fprintf(fileID, '\r\n\r\n-------------------------- Results -------------------------182
\r\n'); 183
fprintf(fileID, '%-40s %12.4f\r\n', 'Density rho [kg/m^3] = ', rho); 184
fprintf(fileID, '%-40s %12.4f\r\n', 'Vapor pressure pv [Pa] = ', pv); 185
fprintf(fileID, '%-40s %12.4f\r\n', 'Volumetric flow Q [m^3/s] = ', Q); 186
fprintf(fileID, '%-40s %12.4f\r\n', 'Gravity acceleration g [m/s^2] = ', g); 187
fprintf(fileID, '%-40s %12.4f\r\n', 'Nominal Head Hn [m] = ', Hn); 188
fprintf(fileID, '%-40s %12.4f\r\n', 'Suction head HS [m] = ', HS); 189
fprintf(fileID, '%-40s %12.4f\r\n', 'Dischagre head HD [m] = ', HD); 190
fprintf(fileID, '%-40s %12.4f\r\n', 'Minimum required head Hdt [m] = ', Hdt); 191
fprintf(fileID, '%-40s %12.4f\r\n', 'Power PW [W] = ', PW); 192
fprintf(fileID, '%-40s %12.4f\r\n', 'Angular velocity omega [rad/s] = ', omega); 193
fprintf(fileID, '%-40s %12.4f\r\n', 'torque [N/m] = ', torque); 194
fprintf(fileID, '%-40s %12.4f\r\n', 'Revolution per second rps [1/s] = ', rps); 195
fprintf(fileID, '%-40s %12.4f\r\n', 'Revolution per minute rpm [1/min] = ', rpm); 196
fprintf(fileID, '%-40s %12.4f\r\n', 'NPSHr [m] = ', NPSHr); 197
fprintf(fileID, '%-40s %12.4f\r\n', 'Anticavitation margin Hsc [m] = ', Hsc); 198
fprintf(fileID, '%-40s %12.4f\r\n', 'Absolute velocity (outlet) C2 [m/s] = ', C2); 199
fprintf(fileID, '%-40s %12.4f\r\n', 'Dragging speed (outlet) u2 [m/s] = ', u2); 200
fprintf(fileID, '%-40s %12.4f\r\n', 'Relative velocty (outlet) W2 [m/s] = ', W2); 201
fprintf(fileID, '%-40s %12.4f', 'Beta angle impeller tip betaTip [deg] = ', betaTipDEG); 202
if betaTipDEG >= 15 && betaTipDEG <= 35 203
fprintf(fileID, ' *OK*\r\n'); 204
else 205
fprintf(fileID, ' *****ERROR*****\r\n'); 206
end 207
Page 69
________________________________________________ 4.3 MatLab functions: pump.m
63
fprintf(fileID, '%-40s %12.4f\r\n', 'Alfa angle impeller tip alpha2 [deg] = ', alpha2); 208
fprintf(fileID, '%-40s %12.4f\r\n', 'Tip diameter Dt2 [m] = ', Dt2); 209
fprintf(fileID, '%-40s %12.4f\r\n', 'Head coefficient PSId = ', PSId); 210
fprintf(fileID, '%-40s %12.4f\r\n', 'Flow coefficient PHId = ', PHId); 211
212
fprintf(fileID, '%-40s %12.4f\r\n', 'Suction diameter D1s = ', D1s); 213
fprintf(fileID, '%-40s %12.4f\r\n', 'Suction shaft diameter Dsh1s = ', Dsh1s); 214
fprintf(fileID, '%-40s %12.4f\r\n', 'Suction flow coefficient PHIs = ', PHIs); 215
fprintf(fileID, '%-40s %12.4f\r\n', 'Suction absolute vel (meridional) C1m = ', C1m); 216
fprintf(fileID, '%-40s %12.4f', 'Meridional components ratio C2m/C1m = ', CmRatio); 217
if CmRatio <= 1.6 218
fprintf(fileID, ' *OK*\r\n'); 219
else 220
fprintf(fileID, ' *****ERROR*****\r\n'); 221
end 222
fprintf(fileID, '%-40s %12.4f\r\n', 'Suction mean diameter D1ms = ', D1ms); 223
fprintf(fileID, '%-40s %12.4f\r\n', 'Suction-mean dragging speed u1ms = ', u1ms); 224
fprintf(fileID, '%-40s %12.4f\r\n', 'Suction-mean abs. vel. (tang.) C1ums = ', C1ums); 225
fprintf(fileID, '%-40s %12.4f\r\n', 'Suction-mean relative velocity W1ms = ', W1ms); 226
fprintf(fileID, '%-40s %12.4f', 'Suction-mean beta angle beta1ms [deg] = ', beta1msDEG); 227
if beta1msDEG >= 15 && beta1msDEG <= 50 228
fprintf(fileID, ' *OK*\r\n'); 229
else 230
fprintf(fileID, ' *****ERROR*****\r\n'); 231
end 232
fprintf(fileID, '%-40s %12.4f\r\n', 'Suction eye dragging speed u1e = ', u1e); 233
fprintf(fileID, '%-40s %12.4f\r\n', 'Suction eye absolute velocity C1e = ', C1e); 234
fprintf(fileID, '%-40s %12.4f\r\n', 'Suction eye relative velocity W1e = ', W1e); 235
fprintf(fileID, '%-40s %12.4f\r\n', 'Suction eye beta angle beta1e [deg] = ', beta1eDEG); 236
fprintf(fileID, '%-40s %12.4f\r\n', 'Suction eye alpha angle alpha1e = ', alpha1e); 237
fprintf(fileID, '%-40s %12.4f\r\n', 'Contraction factor impeller inlet kz1 = ', kz1); 238
fprintf(fileID, '%-40s %12.4f\r\n', 'Suction blades width B1ms = ', B1ms); 239
fprintf(fileID, '\r\n%-40s\r\n', '-VOLUTE DESIGN-'); 240
fprintf(fileID, '%-40s %12.4f\r\n', 'Volute increment coefficient = ', kr); 241
fprintf(fileID, '%-40s %12.4f\r\n', 'Volute starting radius = ', rv0); 242
fprintf(fileID, '%-40s %12.4f\r\n', 'Volute 90° radius = ', rv90); 243
fprintf(fileID, '%-40s %12.4f\r\n', 'Volute 180° radius = ', rv180); 244
fprintf(fileID, '%-40s %12.4f\r\n', 'Volute 270° radius = ', rv270); 245
fprintf(fileID, '%-40s %12.4f\r\n', 'Volute 360° radius (volute discharge) = ', rv360); 246
fprintf(fileID, '%-40s %12.4f\r\n', 'Volute discharge pressure = ', Pvolut); 247
fprintf(fileID, '%-40s %12.4f\r\n', 'Volute pressure increment = ', DeltaPvolut); 248
fclose(fileID); 249
250
%plot impeller 2D 251
figure 252
rot = 360/Zopt; 253
ii = 0; 254
for ii=0:rot:359 255
256
impellerPlot(D1s/2*1000 , Dt2/2*1000, betaTip, ii); 257
end 258
figure 259
impellerPlotDx((D1s/2-Dsh1s/2)*1000, B2*1000, Dsh1s*1000, Dt2*1000); 260
261
end 262
Page 70
Chapter 4 __________________________________________________________________
64
The first part of the code, from line 6 to line 17, asks the input parameters necessary to run the
function. These are: suction temperature, suction pressure, discharge pressure, mass flow,
specific speed, height, suction specific speed, total efficiency, hydraulic efficiency, blades
thickness, eye diameter / tip diameter ratio and the working fluid. After that, the program starts
to calculate the necessary data. The inlet density and the inlet vapor pressure (line 23 to 25) are
determined by the use of the CoolProp libraries. Also a first check about cavitation is performed
through the CoolProp PhaseSI function (line 26) that returns a console feedback about the inlet
fluid state, which can be one of those list in table 4.3.
Once the density is known, it is possible to determine the volumetric flow rate (line 28) using
equation (2.2). The successive line calculates the gravity acceleration as a function of the input
height.
The nominal head, suction head and discharge head are calculated using equation (2.6), while
the required head Hdt, as a first guess, is determined to be the 80% of the suction head (line
36). This value of the required head gives us a first idea of the anti-cavitation margin that should
be obtained.
The power needed by the pump (line 38) is calculated using equation (2.56), the angular
velocity using equation (2.14). It is now possible to determine the required torque dividing the
power by the angular velocity (line 40). Other necessary data are the revolutions per second and
the revolutions per minutes, which are directly related to the angular velocity (line 42 and 43).
The required NPSH results by rearranging equation (2.13). We can now determine the anti-
cavitation margin Hsc (line 47). This values should be compare with the Hdt determined in line
36, which is an esteem of the anti-cavitation margin based on known data.
The next step is to determine the velocity triangles. In all the variables related to the velocity
triangles the subscript “2” stands for the outlet section, while “u” stands for tangential
component and “m” for meridian component. The outlet velocity triangle is determined first.
The starting point is the dragging speed u2 (line 50), which can be calculated using equation
(2.27). It is now possible to determine the tangential component of the absolute velocity using
equation (2.35) and its meridian component by equation (2.36). Being known the two
components of the absolute velocity, it is possible to determine the absolute velocity magnitude
(line 60). In addition we can determine the alpha and beta angles of the velocity triangle by
simple geometrical considerations, that results in equations (2.38) and (2.40). The only
Page 71
________________________________________________ 4.3 MatLab functions: pump.m
65
unknown component is now the relative velocity, which can be calculated as the magnitude by
equation (2.41) and as component-wise using equations (2.42) and (2.43).
The impeller outlet diameter is determined by the dragging speed u2 and the angular velocity.
The adimensional coefficients φ and ψ are determined using equations (2.16) and (2.21)
respectively.
The lines 72 to 84 simply plot the outlet velocity triangle thanks to the function arrow3.m (3).
Some text strings are added to plot the vector names (W2, u2 and C2), the angles (α and β), the
axis units, the title and the date and time when it has been plotted.
The suction diameter is calculated reducing the discharge diameter of a certain value, given by
the parameter kx. The next calculation are the same as for the outlet triangle, but in this case the
variables are determined first for the suction mean diameter and then for the suction eye. Also
the plot follow the same logic used for the outlet velocity triangle.
The next code lines use the function bladesNumber.m to determine the optimal blades number
and the outlet blades width. This function will be examined in section 4.4.
Knowing the optimal blades number we can determine the impeller inlet contraction factor kz1.
The volute design exactly follows what we have described in section 2.6.2: first a value is
assigned to the kr parameter, then the radius at 0, 90°, 180°, 270° and 360° is determined. The
volute discharge velocity is determined using equation (2.73), the output pressure by equation
(2.74) and the pressure increment using equation (2.75).
After that, we estimate the stress to which the
blades are subjected: if the impeller material is
not strong enough to tolerate this stress we may
change material or decrease the pump pressure
increment adding an additional pump stage.The
lines from 166 to 258 have the task of create a
.txt file, called Pump properties, in which the
input parameters and the results are saved. Since
we know the typical range of the design
variables for our application (see chapter 2), this
file also plots the text “*OK*” if the value is
between the typical range or
Figure 4- 2: Pump properties.txt example
Page 72
Chapter 4 __________________________________________________________________
66
“*****ERROR*****” if the value exceeds the boundaries. A sample part of this file is shown
in fig. 4-2.
The last part of the function prints the frontal section and the right section of the designed
impeller. To plot these two figures other two functions have been designed. However we are
not going to explain them since they just use the previously calculated data, with some
geometrical considerations. These functions are listed in Appendix A.
The working scheme of the pump.m function is explained in Figure 4-3.
4.4 MatLab functions: bladesNumber.m
The function bladesNumber.m is internally called by the function pump.m (see section 4.3),
which gives to it the necessary input data. The first part of the code performs a parametrical
analysis by calculating the variables for impellers with 3, 5, 7 and 9 blades, then the function
determines the number of blades which returns the outlet density value which is closest to the
inlet density.
Figure 4- 3: Matlab functions working structure.
Page 73
_________________________________________ 4.4 MatLab functions: bladesNumber.m
67
The second part of the function follows a different approach by determining the optimal number
of blades using the empirical relation (Eq. (2.45)). All the calculated data are saved in a .txt file,
named blades.
%blades number parametrical analisys
%sb blades thickness
function [Zopt, B2b] = bladesNumberV3(C2m, C2u, u2, Dt2, fl, Q, PD, PS, ETAy, sb,
betaTipDEG, beta1msDEG, beta1eDEG, Dsh1s, fluid, opt)
%parametrical analisys
i=1;
for ZN=3:2:9
%contraction factor (impeller discharge) [typical values 0.85 - 0.95]
KZ2(i) = ((((pi*Dt2)/ZN)-(sb/sin(atan(C2m/(u2-C2u)))))/((pi*Dt2)/ZN))^2;
ETApp(i) = ETAy*KZ2(i)*0.9;
PW(i) = (Q*(PD-PS))/ETApp(i);
B2(i) = (Q*KZ2(i))/(((KZ2(i))^0.5)*pi*Dt2*C2m); %blades height
Q2(i) = C2m*((pi*Dt2*B2(i))-(ZN*(sb/sin(atan(C2m/(u2-C2u))))*B2(i))*KZ2(i));
rho2(i) = (fl*KZ2(i))/Q2(i);
T2(i) = CoolProp.PropsSI('T', 'D', rho2(i), 'P', PD, fluid);
i=i+1;
end
[v, index] = min(abs(opt-rho2)); %closest value to optimal density
%Zopt = index+(index+1); %optimal blades number
%approximate blades number "b"
betaMedDEG = mean([betaTipDEG, beta1msDEG, beta1eDEG]);
betaMedRAD = betaMedDEG * pi/180;
ZNa = 2*6.5*(0.5*((Dt2/2)+(Dsh1s/2))/((Dt2/2)-(Dsh1s/2)))*betaMedRAD;
ZNb = round(ZNa);
KZ2b = ((((pi*Dt2)/ZNb)-(sb/sin(atan(C2m/(u2-C2u)))))/((pi*Dt2)/ZNb))^2;
ETAppb = ETAy*KZ2b*0.9;
B2b = (Q*KZ2b)/((KZ2b^0.5)*pi*Dt2*C2m);
Q2b = C2m*((pi*Dt2*B2b)-(ZNb*(sb/sin(atan(C2m/(u2-C2u))))*B2b)*KZ2b);
rho2b = (fl*KZ2b)/(Q2b);
PWb = (Q2b*(PD-PS))/ETAppb;
T2b = CoolProp.PropsSI('T', 'D', rho2b, 'P', PD, fluid);
Zopt = ZNb;
fileID = fopen('blades.txt', 'w');
fprintf(fileID, '%-40s\r\n', datestr(clock));
fprintf(fileID, '******************************************************************\r\n');
fprintf(fileID, '******************************************************************\r\n');
fprintf(fileID, '*********** ***********\r\n');
fprintf(fileID, '*********** Blades number parametrical analisy ***********\r\n');
fprintf(fileID, '*********** ***********\r\n');
Page 74
Chapter 4 __________________________________________________________________
68
fprintf(fileID, '******************************************************************\r\n');
fprintf(fileID,
'******************************************************************\r\n\r\n');
fprintf(fileID,'%12s %12s %12s %12s %12s\r\n', ' ','3 blades','5 blades','7 blades','9
blades');
fprintf(fileID,'%12s %12.4f %12.4f %12.4f %12.4f\r\n', 'KZ2', KZ2);
fprintf(fileID,'%12s %12.4f %12.4f %12.4f %12.4f\r\n', 'ETApp', ETApp);
fprintf(fileID,'%12s %12.2f %12.2f %12.2f %12.2f\r\n', 'PW [W]', PW);
fprintf(fileID,'%12s %12.4f %12.4f %12.4f %12.4f\r\n', 'B2 [m]', B2);
fprintf(fileID,'%12s %12.4f %12.4f %12.4f %12.4f\r\n', 'Q2 [m^3/s]', Q2);
fprintf(fileID,'%12s %12.4f %12.4f %12.4f %12.4f\r\n', 'rho2[kg/m^3]', rho2);
fprintf(fileID,'%12s %12.4f %12.4f %12.4f %12.4f\r\n', 'T2 [K]', T2);
fprintf(fileID,'\r\n--------------------------------------------------------------------
\r\n');
fprintf(fileID,' approximate blades number ("solution b") \r\n');
fprintf(fileID,'--------------------------------------------------------------------
\r\n\r\n');
fprintf(fileID,'%14s %12.4f\r\n', 'ZNa = ', ZNa);
fprintf(fileID,'%14s %12i\r\n', 'ZNb = ', ZNb);
fprintf(fileID,'%14s %12.4f\r\n', 'KZ2b = ', KZ2b);
fprintf(fileID,'%14s %12.4f\r\n', 'ETAppb = ', ETAppb);
fprintf(fileID,'%14s %12.2f\r\n', 'PWb [W] = ', PWb);
fprintf(fileID,'%14s %12.4f\r\n', 'B2b [m] = ', B2b);
fprintf(fileID,'%14s %12.4f\r\n', 'Q2b [m^3/s] = ', Q2b);
fprintf(fileID,'%14s %12.4f\r\n', 'rho2b [kg/m^3] = ', rho2b);
fprintf(fileID,'%14s %12.4f\r\n', 'T2b [K] = ', T2b);
fclose(fileID);
end
4.5 Software test-case
In order to test the reliability of the MatLab functions that we have developed, we have
considered the first stage of a RL10-3-3A expander cycle rocket engine, whose pumps data are
available in the literature (4).
The input data for the hydrogen pump are:
Fluid H2 Suction specific speed 24.0
Suction temperature [K] 21.44 Height [m] 350.0
Mass flow [kg/s] 2.7946 Pump efficiency 0.5854
Suction pressure [Pa] 184779.0 Hydraulic efficiency 0.75
Discharge pressure [Pa] 3694000.0 Blades thickness [m] 0.002
Specific speed 0.2020 Inlet/outlet diam. ratio 0.55
Page 75
_________________________________________________________ 4.5 Software test-case
69
With this values we obtain a 5 blades impeller with a 3.1 mm outlet blades width and 93.9 mm
suction diameter (Fig. 4-4). Table 4-4 shows the engine known data compared with the results
coming from the developed software. As we can see in the “relative error” column, the data gap
is very tight, which proves the reliability of the software that we have developed.
Variable RL10-3-3A (LH2)
33A3
Pump.m outputs Relative error
Speed [rpm] 31494 31430 0.203%
Torque [Nm] 72.93 73.07 0.192%
Power [W] 240404.41 242701.9 0.956%
Inlet density [kg/m3] 69.472 69.659
4
0.269%
Outlet density [kg/m3] 68.639 68.9 0.380%
Outlet temperature [K] 26.47 26.36 0.416%
Efficiency 0.5854 0.5801 0.905%
Table 4- 4: LH2 pump orginal data and software results
The data obtained by the blades number parametrical analysis (Appendix B) shows how we
would obtain a higher pump efficiency with a lower blades number. On the other hand the mass
flow is being increased and so the discharge density. In this case we have chosen a lower
efficiency level in order to achieve a definite discharge density, which is required by the cooling
jacket and the injector and combustion chamber design.
In the Fig. 4-5 we can see the impeller inlet (eye) and the impeller outlet velocity triangles. The
full list of the pump data can be read in Appendix B.
Figure 4- 4: RL10-3-3A LH2 Impeller frontal wiev (left) and right wiev (right).
Page 76
Chapter 4 __________________________________________________________________
70
Figure 4- 5: RL10-3-3A LH2 Impeller inlet and outlet velocity triangles
In order to offer a realistic image of the pump, a 3-dimensional model of the impeller have been
designed using Solidworks. The result is shown in Figure 4-6.
Figure 4- 6: RL10-3-3A LH2 pump impeller.
In order to have and additional confirmation of the reliability of the software that we have
developed, also the oxidizer pump of the RL10-3-3A engine has been tested In this case the
input data are:
Page 77
_________________________________________________________ 4.5 Software test-case
71
Fluid O2 Suction specific speed 20.0
Suction temperature [K] 97.05 Height [m] 350.0
Mass flow [kg/s] 13.953 Pump efficiency 0.6408
Suction pressure [Pa] 275514.5 Hydraulic efficiency 0.75
Discharge pressure [Pa] 4282333.8 Blades thickness [m] 0.001
Specific speed 0.33 Inlet/outlet diam. ratio 0.60
As the previous simulation, also the LO2 pump designed with our software gives virtually
identical results to the real pump; the two are compared in (Table 4-5). In this case it must be
pointed out that the approximate blades number (“solution b”) returns 8 as optimal blades
number. The results shown in Table 4-5 are for a 3-blades solution, since with this solution the
values are the closest to the real ones. This is just a design choice, since with this solution we
obtain a lower efficiency, but more suitable values of temperature and density.
The same set of graph and images of the LH2 pump are presented (Figure 4-7, Figure 4-8 and
Figure 4-9), the full set of data can be found in Appendix C.
Variable RL10-3-3A (LO2)
33A3
Pump.m outputs Relative error
Speed [rpm] 12598 12614 0.127%
Torque [Nm] 59.78 59.68 0.167%
Power [W] 78825.35 78693.1 0.168%
Inlet density [kg/m3] 1106.4 1106.6
4
0.000%
Outlet density [kg/m3] 1105.6 1105.2 0.000%
Outlet temperature [K] 99.22 99.36 0.141%
Efficiency 0.6408 0.6420 0.187%
Table 4- 5: LO2 pump original data and software results.
Page 78
Chapter 4 __________________________________________________________________
72
Figure 4- 7: RL10-3-3A LO2 Impeller frontal wiev (left) and right wiev (right).
Figure 4- 8: RL10-3-3A LO2 Impeller inlet and outlet velocity triangles
Figure 4- 9: RL10-3-3A LO2 pump impeller.
Page 79
73
Chapter 5
Methane pump development
5.1 Turbopump specifics and applications
The final stage of this work consists in designing a turbopump for an expander cycle liquid
rocket engine powered with liquid methane (LCH4) as propellant and liquid oxygen (LO2) as
oxidizer. This fuel oxidizer combination has already been used for the LM10-MIRA developed
by the collaboration of the Italian company AVIO and the Russian KBKHA. This engine is the
first liquid methane-powered vehicle to fly (1). The turbopump designed for the LM10 is
characterized by a low volumetric flow pump with a high pressure rise, achieved with only one
centrifugal stage (2).
The pump we are going to design has roughly the same specifics of the LM10 pump, which
makes it suitable for an engine of the same thrust class (10 tons). In particular the used input
data that have been used are:
Fluid CH4 Suction specific speed 20
Suction temperature [K] 110 Height [m] 350.0
Mass flow [kg/s] 3.95 Pump efficiency 0.62
Suction pressure [Pa] 135000 Hydraulic efficiency 0.80
Discharge pressure [Pa] 14200000 Blades thickness [m] 0.001
Specific speed 0.19 Inlet/outlet diam. ratio 0.52
Running the pump.m function with these values we obtain a 6 blades impeller with a 96.8 mm
outlet diameter, which is designed to work at a rotational speed of 45965 rpm. The power
needed by the pump equals 208.7 kW, the pump efficiency is 0.6267 and we achieve an outlet
temperature of 122 K. The full set of data can be found in Appendix D.
Using the blade-number parametrical analysis (blades.txt file), it is possible to see how
decreasing the number of blades we obtain a more efficient pump, with a lower discharge
temperature. On the other hand, by doing so, we increase the fluid density, which may be a
Page 80
Chapter 5 __________________________________________________________________
74
problem for the cooling system. For this reason, as first trial, we consider optimal the number
of blades obtained using the empirical equation (2.47) (“solution b” in the blades.txt file).
The velocity triangles are shown in Figure 5-1, while Figure 5-2 shows the frontal and right
view. The impeller 3-D model of the impeller is shown in Figure 5-3.
Figure 5- 1: Inlet eye and outlet velocity triangle for the LCH4 pump impeller
Figure 5- 2: Frontal and right view of the LCH4 pump impeller
The volute has been designed with kr = 1.25 and a starting radius of 0.0509 m. Using these two
parameters we obtain: 90° radius = 63.6 mm, 180° radius = 79.6 mm, 270° radius = 99.4 mm,
Page 81
_______________________________________ 5.1 Turbopump specifics and applications
75
discharge radius = 124.3 mm. With this configuration the volute discharge pressure equals
14.26 MPa, meaning a pressure increment through the volute of 0.0645 MPa. The 3D model of
the designed volute is shown in Figure 5-4 and Figure 5-5.
Figure 5- 4 Figure 5- 3
Figure 5- 5
Page 82
Chapter 5 __________________________________________________________________
76
5.2 Conclusions
The developed software is very useful to give a first indication about the dimensions and the
specifics of a generic pump. Since the software has been validated with hydrogen and oxygen,
we can say that it works properly for a wide range of fluids density. In addition with the
parametrical study of the impeller blades it is possible to choose the number of blades according
to the design requirements, since changing the blades number we change the pump efficiency,
the outlet temperature and the outlet density.
The CoolProp libraries seems to work properly, and we can say that they are a reliable source
which can be used to determine the fluid properties in different conditions.
Not surprisingly, we have found that the chosen working fluid and the input parameters
radically change the pump characteristics. Figure 5-6 shows the difference between the
designed methane impeller (green), the LR10 oxygen impeller (gold) and the LR10 hydrogen
impeller (red). As we can see the methane impeller is much smaller than the other two. This is
a desirable property since it reduces the pump dimensions, thus allowing a more compact engine
design, which results in lower weight and drag.
Figure 5- 6
Page 83
77
Appendix
Appendix A – MatLab additional functions
function impellerPlot(r1, r2, rsh, beta2, rot)
whitebg('k')
set(gcf, 'color', 'k')
set(gcf, 'InvertHardCopy', 'off');
ang([0,0], r2, [0, 2*pi], 'w-'); hold on
ang([0,0], r1, [0, 2*pi], 'w-');
text(-r2, r2+r2/10, datestr(clock));
i=0;
for teta = 0:0.01:2*pi
i=i+1;
x2(i) = r2*cos(teta);
y2(i) = r2*sin(teta);
end
j=0;
i=0;
ii=0;
for ra=20:1:120
i=i+1;
delta(i) = inter(ra, x2, y2, beta2);
r(i) = ra;
end
c = delta(delta~=0);
pos=find(delta==min(c));
rFin=r(pos);
j=0;
for teta = 0:0.01:pi
j=j+1;
xa(j) = -rFin+rFin*cos(teta);
ya(j) = rFin*sin(teta);
end
[a, b] = intersections(x2, y2, xa, ya);
for j=1:(pi/0.01)
if xa(j)>a
xf(j) = xa(j);
yf(j) = ya(j);
end
end
h = plot(xf,yf, 'b');
xlabel('[mm]');
ylabel('[mm]');
Page 84
Appendix _______________________________________________________________________
78
rotate(h, [0,0,1], rot); %chiamare la funzione con ciclo per far ruotare
for teta = 0:0.01:2*pi
i=i+1;
xsh(i) = rsh*cos(teta);
ysh(i) = rsh*sin(teta);
end
area(xsh,ysh, 'ShowBaseLine', 'off', 'FaceColor', 'w');
daspect([1,1,1]);
end
function impellerPlotDx(B1, B2, Dshaft, Dt2)
Rshaft = Dshaft/2;
Rt2 = Dt2 / 2;
whitebg('k')
set(gcf, 'color', 'k')
set(gcf, 'InvertHardCopy', 'off');
plot([-10, Rt2+Rt2/10],[0,0], 'color', 'w', 'LineWidth', 1); hold on
plot([0, 0], [-(Rt2+Rt2/10); Rt2+Rt2/10], 'color', 'w', 'LineWidth', 1);
text(2*B2, Rt2+Rt2/10, datestr(clock));
%superior half
plot([0, B2], [Rt2, Rt2], 'b');
i=0;
r = Rt2-(B1+Rshaft);
for teta = 0:0.01:pi/2
i=i+1;
x1(i) = r-r*cos(teta)+B2;
y1(i) = -r*sin(teta)+Rt2;
end
plot(x1, y1, 'b');
plot([r+B2, r+B2], [(B1+Rshaft), 0], 'b');
rr = Rt2-Rshaft;
i=0;
for teta = 0:0.01:pi/2
i=i+1;
x2(i) = rr-rr*cos(teta);
y2(i) = -rr*sin(teta)+Rt2;
if x2(i)<(r+B2)
xx(i) = x2(i);
yy(i) = y2(i);
Page 85
__________________________________________ Appendix A – MatLab additional functions
79
end
end
plot(xx, yy, 'b--');
%area(xx, yy);
%bottom half
plot([0, B2], [-Rt2, -Rt2], 'b');
i=0;
r = Rt2-(B1+Rshaft);
for teta = 0:0.01:pi/2
i=i+1;
x1(i) = r-r*cos(teta)+B2;
y1(i) = +r*sin(teta)-Rt2;
end
plot(x1, y1, 'b');
plot([r+B2, r+B2], [-(B1+Rshaft), 0], 'b');
rr = Rt2-Rshaft;
i=0;
for teta = 0:0.01:pi/2
i=i+1;
x2(i) = rr-rr*cos(teta);
y2(i) = rr*sin(teta)-Rt2;
if x2(i)<(r+B2)
xxb(i) = x2(i);
yyb(i) = y2(i);
end
end
plot(xxb, yyb, 'b--');
%Shaft
i=0;
for teta = 0:0.01:pi
i=i+1;
x(i) = Rshaft*sin(teta)+r+B2;
y(i) = Rshaft*cos(teta);
end
plot(x, y, 'b');
xlabel('[mm]');
ylabel('[mm]');
daspect([1,1,1]);
hold off
end
function delta = inter(ra, x2, y2, beta2)
j=0;
for teta = 0:0.01:pi
j=j+1;
Page 86
Appendix _______________________________________________________________________
80
xa(j) = -ra+ra*cos(teta);
ya(j) = ra*sin(teta);
end
%plot(xa,ya);
[a, b] = intersections(x2, y2, xa, ya);
if a~=0
[xai, xaiPos] = min(abs(a-xa));
xa(xaiPos);
betaA=abs(atan((ya(xaiPos)-ya(xaiPos-1))/(xa(xaiPos)-xa(xaiPos-1))));
delta = abs(beta2-betaA);
else
delta = 0;
end
end
Page 87
_______________________________ Appendix B – RL10-3-3A LH2 pump output parameters
81
Appendix B – RL10-3-3A LH2 pump output parameters
Page 88
Appendix _______________________________________________________________________
82
Page 89
_______________________________ Appendix B – RL10-3-3A LH2 pump output parameters
83
Page 90
Appendix _______________________________________________________________________
84
Appendix C– RL10-3-3A LO2 pump output parameters
Page 91
________________________________ Appendix C– RL10-3-3A LO2 pump output parameters
85
Page 92
Appendix _______________________________________________________________________
86
Appendix D: Designed methane pump output parameters
Page 93
______________________________ Appendix D: Designed methane pump output parameters
87
Page 94
Appendix _______________________________________________________________________
88
Page 95
89
References
1. Strain, William S. Design of an oxygen turbopump for a dual expander rocket engine. 2008.
2. Sutton, George P. Rocket propulsion elements (7th edition).
3. Huang, Dieter K. Huzel - David H. Modern engineering for design of liquid propellant rocket
engines.
4. Sexton, Gabriel L. Johnson - Thomas D. Johnson sexton cycle rocket engine patent.
5. Limerick, Charles D. METHOD AND APPARATUS FOR INCREASING COMBUSTION
CHAMBER PRESSURE IN A HIGH PRESSURE EXPANDER CYCLE ROCKET ENGINE. 5,410,874
USA, 02 05 1995.
6. NASA contractor report 187217 - Advanced engine study program. Masters, D.E. Galler, T.F.
Denman, R.A. Shied, J.R. Black. 1993.
7. SANTIAGO, JORGE R. Evolution of the RL10 liquid rocket engine for a new upperstage
application.
8. Mitsubishi Heavy Industries Technical Review Vol. 48 No. 4. ONGA, M. ATSUMI - K.
YOSHIKAWA - A. OGAWARA - T. 2011.
9. Cannon, James L. Liquid Propulsion: Propellant Feed System Design. Encyclopedia of Aerospace
Engineering, Volume 2 Propulsion & Power, Wiley Publishers.
10. Leto, A. Turbopump design methods for liquid rocket engine.
11. Huang, Dieter K. Huzel - David H. MOdern engineerinf for design of liquid-propellant rocket
engines. 1992.
12. Wright, Terry. Fluid Machinery: Performance, Analysis, and Design.
13. Cooper, I. J. Karassik - J. P. Messina - P. Pump Handbook.
14. Centrifugal pumps design and application - 2nd edition. Ross, V. S. Lobanoff - R. R. 1992.
15. Effect of relative impeller-to-volute position on hydraulic efficiency and static radial force
distribution in a circular volute centrifugal pump. D. O. Baun, R. D. Flack, L. Kostner. s.l. : ASME
Journal of Fluids Engineering, 2000.
16. Effect of volute design and number of impeller blades on laterla impeller forces and hydraulic
performances. D. O. Baun, R. D. Flack. 2003.
Page 96
References ______________________________________________________________________
90
17. huang, Huzel and. Design of liquid propellants rocket engines.
18. [Online] www.coolprop.org.
19. [Online] http://www.coolprop.org/coolprop/HighLevelAPI.html#parameter-table.
20. Copyright (c) 2002, Tom Davis -
http://www.mathworks.com/matlabcentral/fileexchange/14056-arrow3-version-5. [Online]
21. Binder, Michael P. A transient model of the RL10A-3-3A rocket engine.
22. http://www.caeconference.com/proceedings/abstract/abstract_08/avio_cira_cfx.html.
[Online]
23. FUel turbopump development for the LM10-MIRA LOx-LNG expander cycle enginein the
frame of the LYRA program. M. Rudnykh, G. Cagiano, A.G. Kravchenko, S.V. Chembartsev,
A. De Lillis, E. D'Anversa.