

2
CONTROLLI AUTOMATICI
A.A. 2010-2011PROGRAMMA DEL CORSO
Richiami. Significato e parametri di una funzione di trasferimento. Stabilità. Teoremi fondamentali della Trasformata di Laplace. Criterio di Routh-Hurwitz. Parametri e andamenti tipici della risposta al gradino per sistemi semplici [BolzernCapitoli 1, 2, 4, 5, 6, 9]
Luogo delle Radici. Significato e regole di tracciamento. Taratura del luogo. Equazione dei punti dopppi. Angoli di partenza e di arrivo. . [Bolzern Capitolo 12]
Sospensioni attive e passive per auto veicoli. Generalità. Modelli quarter car, half car, e full car. Analisi dinamica di sospensioni attive. Miglioramento del confort e controllo dell’assetto. Sospensioni semi-attive. [Appunti lezione,. Bolzernparagrafo. 19.3].
Specifiche a regime. Sistemi di tipo 0,1 e 2. Precisione a regime e reiezione dei disturbi. Attenuazione di disturbi sinusoidali. [Bolzern Capitolo 12]
Specifiche transitorie. Legami tra specifiche a ciclo chiuso e a ciclo aperto. Sintesi per tentativi. Reti correttrici anticipatrici, attenuatrici e a sella. Diagrammi universali. [Bolzern Capitolo 11]
Sistemi con ritardi finiti. Esempi. Stabilità a ciclo chiuso. [Appunti lezione]
Sintesi mediante Luogo delle radici. Sintesi mediante regolatori PID. Regole di taratura. Configurazioni PI-D ed I-PD. [Bolzern Capitoli 12, 14]
Strutture di controllo avanzate. Predittore di Smith. Schemi anti wind-up. Controllo in cascata. Controllo feedforward. Compensazione di disturbi misurabili. Model-following. Controllo con override. [ Magnani capitolo 8]
Diagrammi P&I. [Magnani, appendice A.1]
Esercitazioni al calcolatore (matlab-simulink) e prove sperimentali in laboratorio.
TESTI DI RIFERIMENTO
P. Bolzern, R. Scattolini, N. SchiavoniFondamenti di controlli automatici, terza edizioneMcGraw Hill,2008.
G. Magnani, G. Ferretti, P.Rocco,Tecnologie dei sistemi di controllo, seconda edizioneMcGraw Hill,2007.

4
http://www.diee.unica.it/~pisano/infoit.html
Didattica->Controlli automatici (ing Meccanica)
5
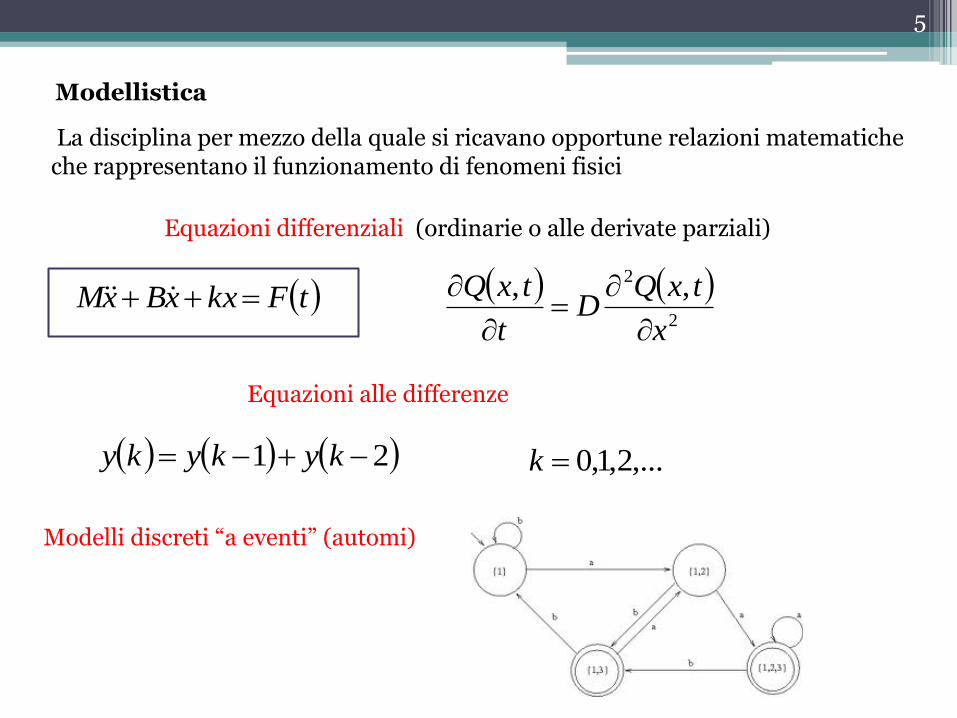
Modellistica
La disciplina per mezzo della quale si ricavano opportune relazioni matematiche che rappresentano il funzionamento di fenomeni fisici
Equazioni differenziali (ordinarie o alle derivate parziali)
Equazioni alle differenze
21 kykyky ,...2,1,0k
Modelli discreti “a eventi” (automi)
tFkxxBxM 2
2 ,,
x
txQD
t
txQ
6
Fenomeno fisico Sistema dinamico
Grandezze di interesse
Variabili del sistema
“Cause”
“Effetti”
Ingressi
Uscite
7
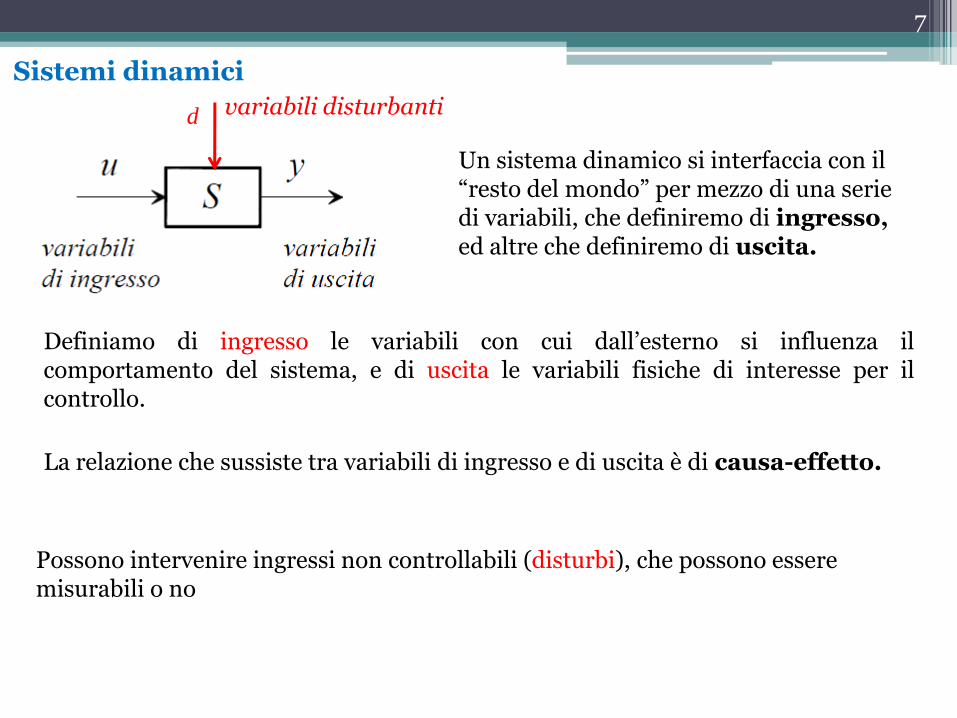
Sistemi dinamici
Un sistema dinamico si interfaccia con il “resto del mondo” per mezzo di una serie di variabili, che definiremo di ingresso, ed altre che definiremo di uscita.
Definiamo di ingresso le variabili con cui dall’esterno si influenza ilcomportamento del sistema, e di uscita le variabili fisiche di interesse per ilcontrollo.
La relazione che sussiste tra variabili di ingresso e di uscita è di causa-effetto.
Possono intervenire ingressi non controllabili (disturbi), che possono essere misurabili o no
variabili disturbantid
8
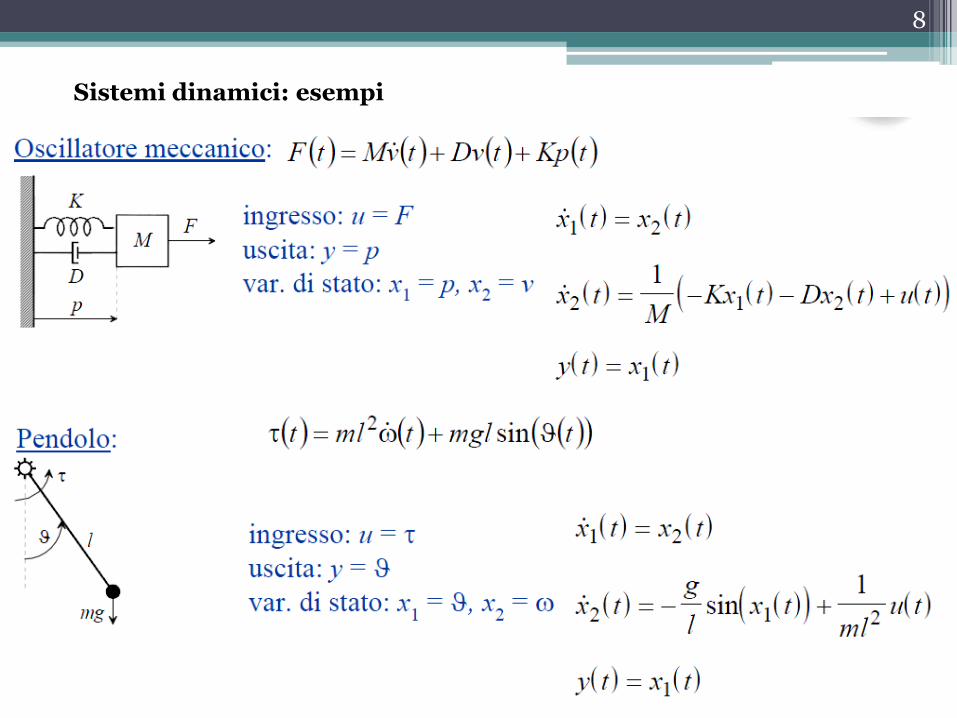
Sistemi dinamici: esempi
9
Si dicono SISO (Single Input Single Output) i sistemi con ingresso e uscita scalare, genericamente MIMO (Multiple Input Multiple Output) gli altri.
Si dicono lineari tempo-invarianti (LTI) i sistemi descritti da equazioni differenziali lineari a coefficienti costanti.
Oscillatore meccanico: SISO, lineare
Pendolo: SISO, non lineare
10
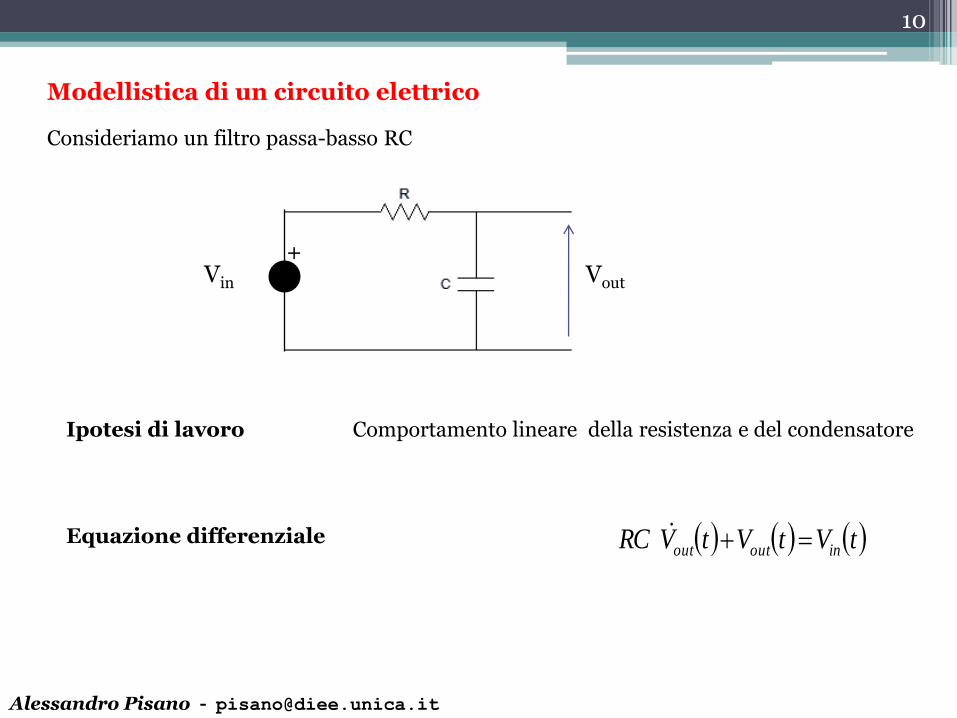
Modellistica di un circuito elettrico
Consideriamo un filtro passa-basso RC
+Vin Vout
tVtVtVRC inoutout Equazione differenziale
Alessandro Pisano - [email protected]
Ipotesi di lavoro Comportamento lineare della resistenza e del condensatore
11
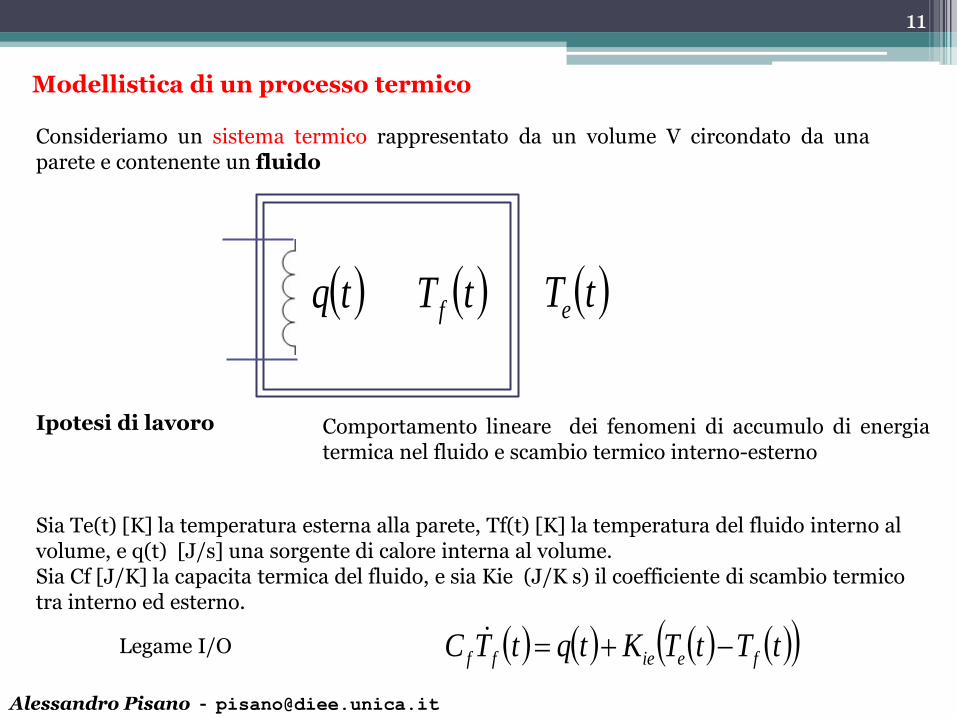
Modellistica di un processo termico
Consideriamo un sistema termico rappresentato da un volume V circondato da unaparete e contenente un fluido
Sia Te(t) [K] la temperatura esterna alla parete, Tf(t) [K] la temperatura del fluido interno al volume, e q(t) [J/s] una sorgente di calore interna al volume. Sia Cf [J/K] la capacita termica del fluido, e sia Kie (J/K s) il coefficiente di scambio termico tra interno ed esterno.
tT f tTe tq
tTtTKtqtTC feieff
Alessandro Pisano - [email protected]
Legame I/O
Ipotesi di lavoro Comportamento lineare dei fenomeni di accumulo di energiatermica nel fluido e scambio termico interno-esterno

12
Complichiamo il modello
Trattiamo in maniera distinta gli accumuli termici nel volume e nella parte di contorno. Definiamo quindi un modello più complesso che mi fornisca anche l’evoluzione temporale della temperatura della parete Tp(t).
Cf [J/K] è la capacita termica del gas interno al volumeCp [J/K] è la capacita termica del materiale che costituisce la pareteKip [J/K s] è il coefficiente di scambio termico tra l’interno del volume e la parete. Kpe [J/K s] è il coefficiente di scambio termico tra la parete e l’esterno.
tT f tTe tq
tTptemperatura della parete
tTtTKtqtTC fpipff
tTtTKtTtTKtTC fpippepepp Legame I/O
13
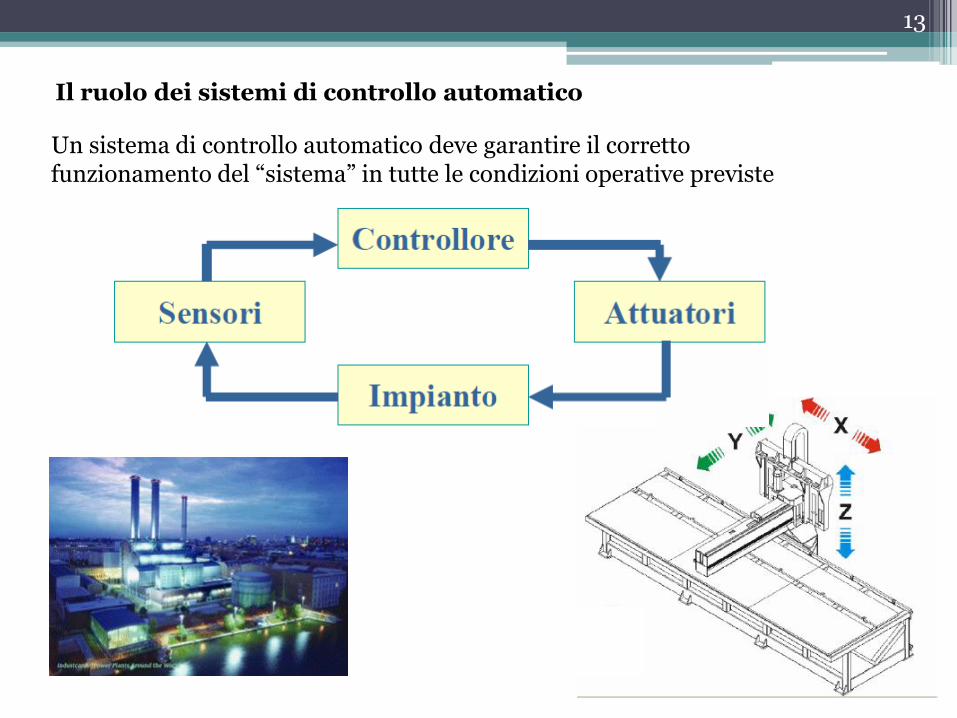
Il ruolo dei sistemi di controllo automatico
Un sistema di controllo automatico deve garantire il correttofunzionamento del “sistema” in tutte le condizioni operative previste
14
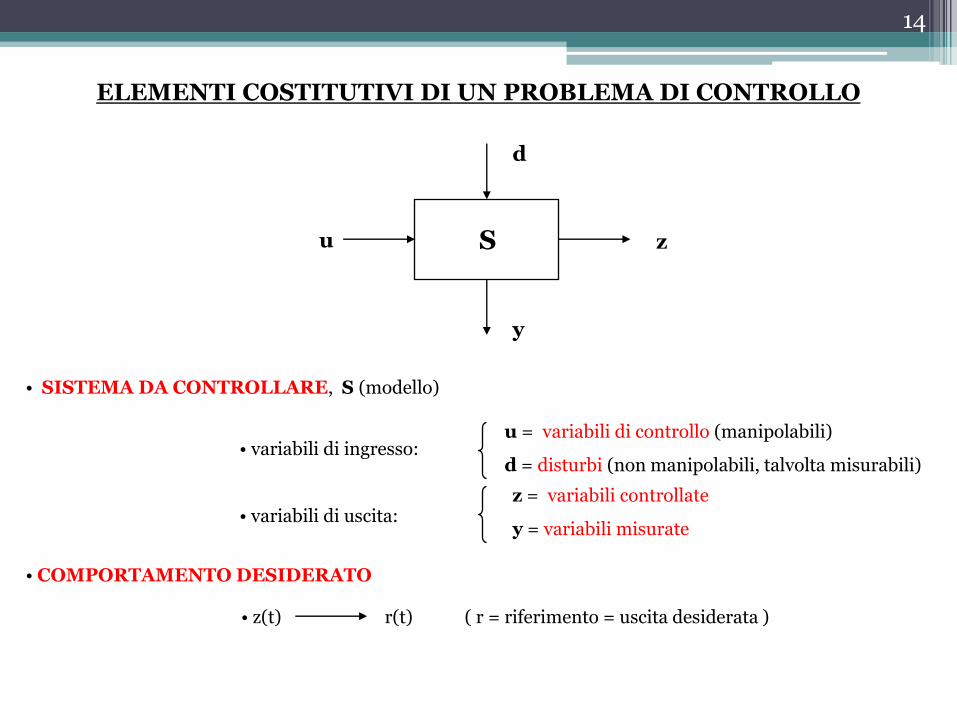
ELEMENTI COSTITUTIVI DI UN PROBLEMA DI CONTROLLO
• SISTEMA DA CONTROLLARE, S (modello)
• variabili di ingresso:
• variabili di uscita:
• COMPORTAMENTO DESIDERATO
S
u = variabili di controllo (manipolabili)
d = disturbi (non manipolabili, talvolta misurabili)
z = variabili controllate
y = variabili misurate
• z(t) r(t) ( r = riferimento = uscita desiderata )
u
y
z
d
15
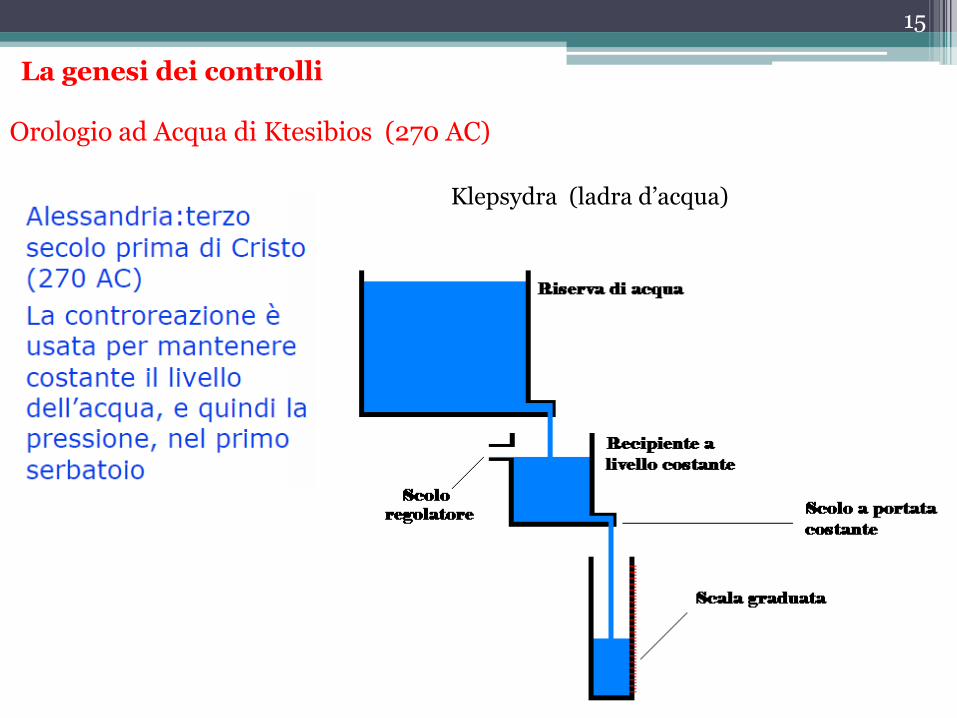
Orologio ad Acqua di Ktesibios (270 AC)
Klepsydra (ladra d’acqua)
La genesi dei controlli

16
Orologio ad Acqua di Ktesibios (270 AC)
17
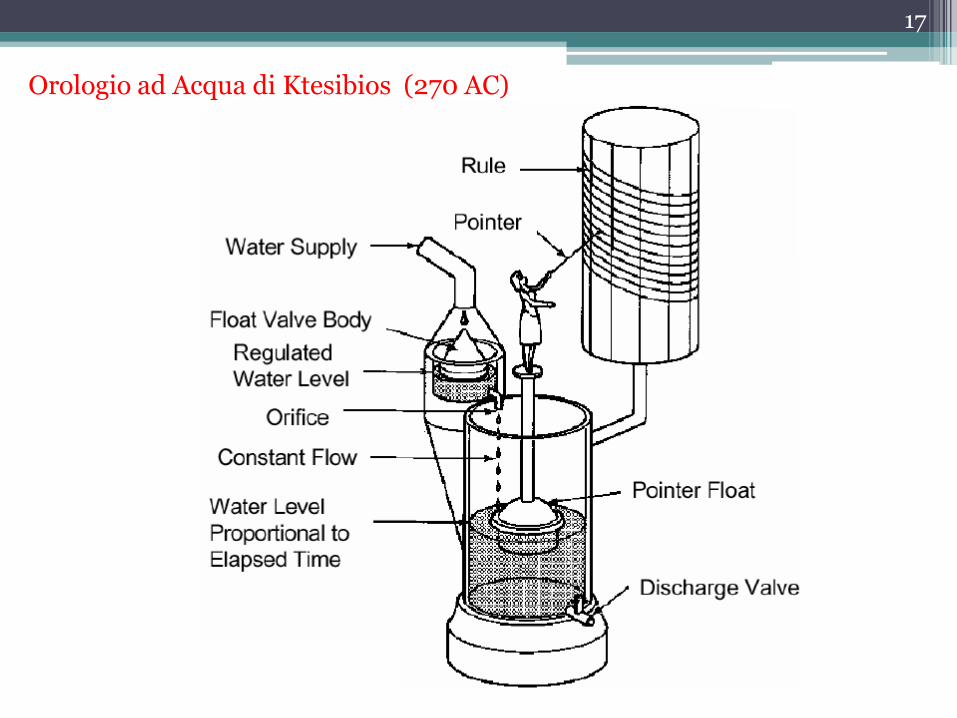
Orologio ad Acqua di Ktesibios (270 AC)

18
Sistema automatico di puntamento
19
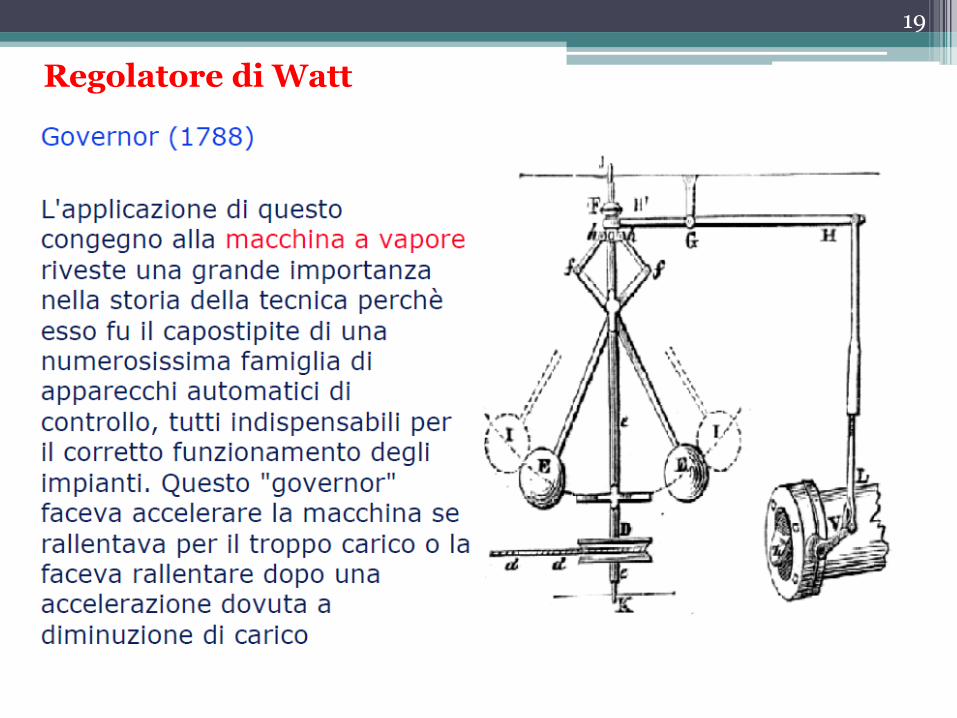
Regolatore di Watt

20
Regolatore di Watt
21
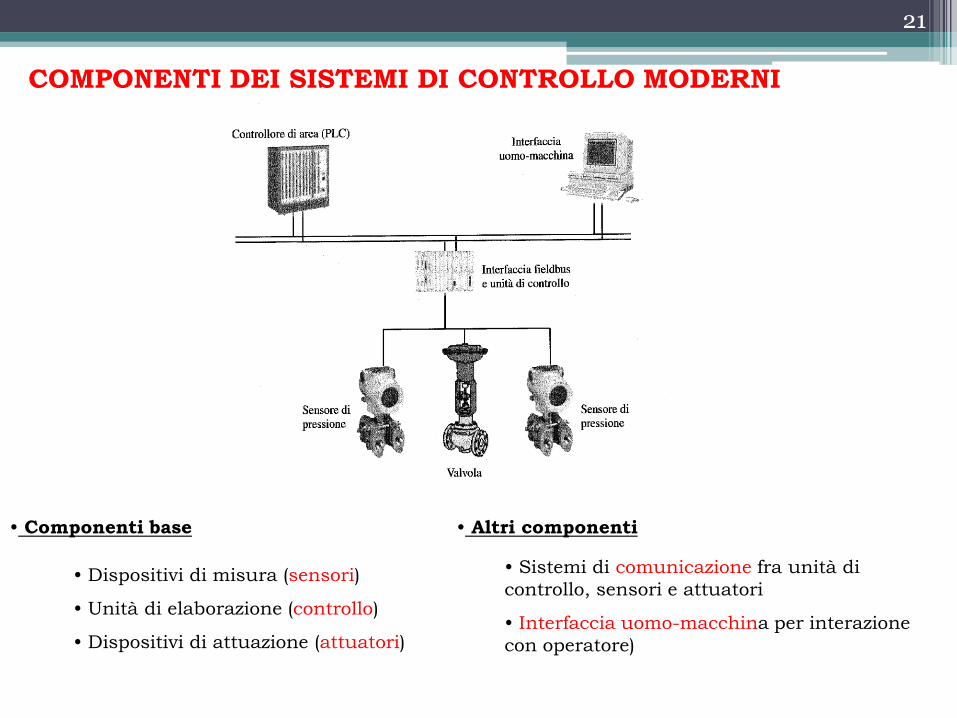
COMPONENTI DEI SISTEMI DI CONTROLLO MODERNI
• Componenti base
• Dispositivi di misura (sensori)
• Unità di elaborazione (controllo)
• Dispositivi di attuazione (attuatori)
• Altri componenti
• Sistemi di comunicazione fra unità di
controllo, sensori e attuatori
• Interfaccia uomo-macchina per interazione
con operatore)
22
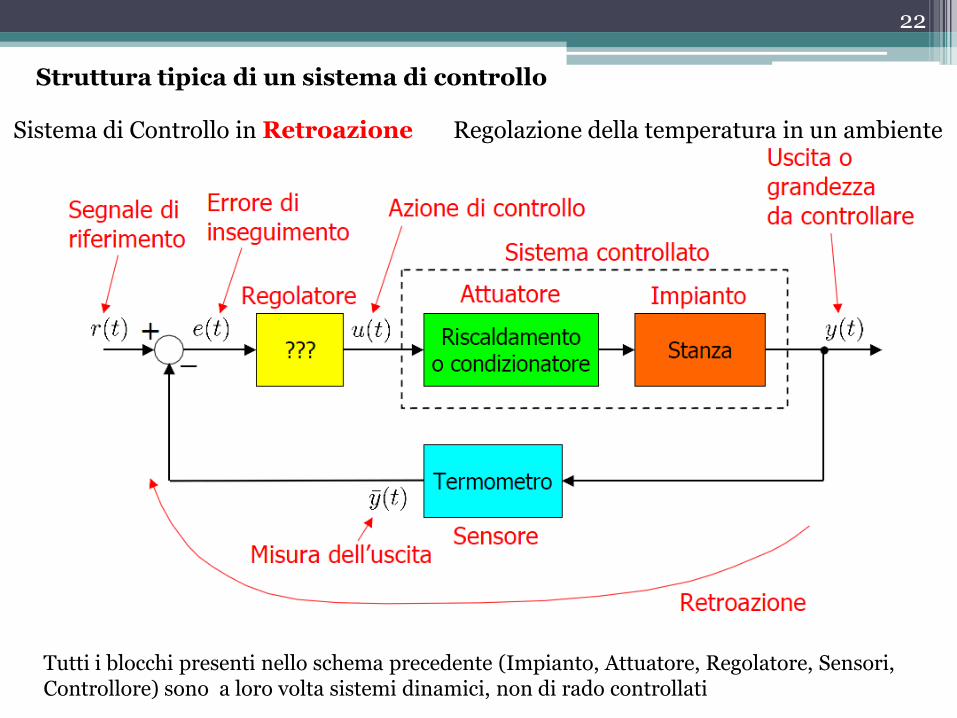
Struttura tipica di un sistema di controllo
Sistema di Controllo in Retroazione Regolazione della temperatura in un ambiente
Tutti i blocchi presenti nello schema precedente (Impianto, Attuatore, Regolatore, Sensori, Controllore) sono a loro volta sistemi dinamici, non di rado controllati

23
Sintesi di sistemi di controllo in retroazione
Assegnato un andamento desiderato ydes della variabile di uscita (riferimento, o set-point), si deve progettare un controllore che ne assicuri l’”inseguimento” entro limiti “accettabili”
- In presenza di disturbi- In presenza di incertezze sui parametri fisici
S
u
y z
d
desy
Controllore
e
sistemi di regolazione vs. sistemi di asservimento.
24
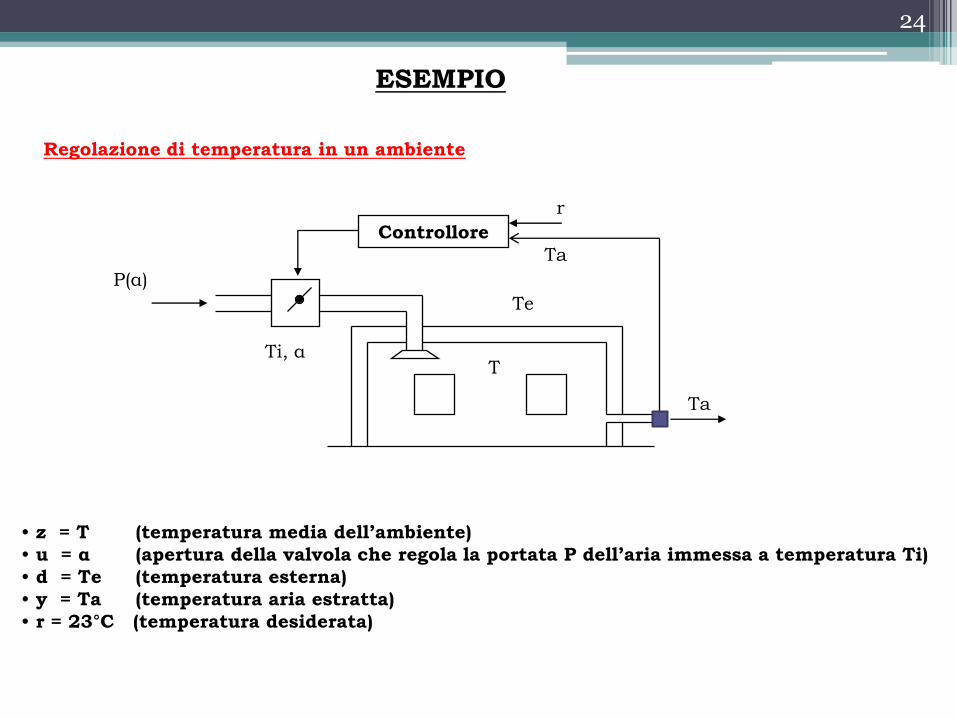
ESEMPIO
Regolazione di temperatura in un ambiente
Ta
P(α)
Te
Ti, αT
• z = T (temperatura media dell’ambiente)
• u = α (apertura della valvola che regola la portata P dell’aria immessa a temperatura Ti)
• d = Te (temperatura esterna)
• y = Ta (temperatura aria estratta)
• r = 23°C (temperatura desiderata)
Controllore
r
Ta
25
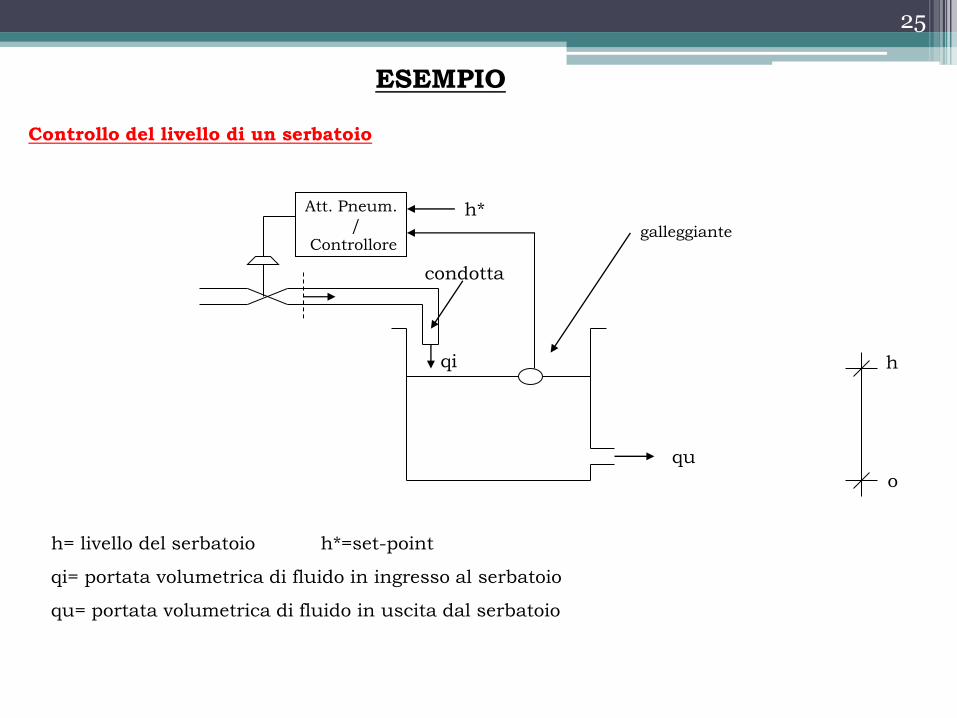
Controllo del livello di un serbatoio
h= livello del serbatoio h*=set-point
qi= portata volumetrica di fluido in ingresso al serbatoio
qu= portata volumetrica di fluido in uscita dal serbatoio
Att. Pneum.
/
Controlloregalleggiante
qu
qi
h*
h
o
condotta
ESEMPIO
26
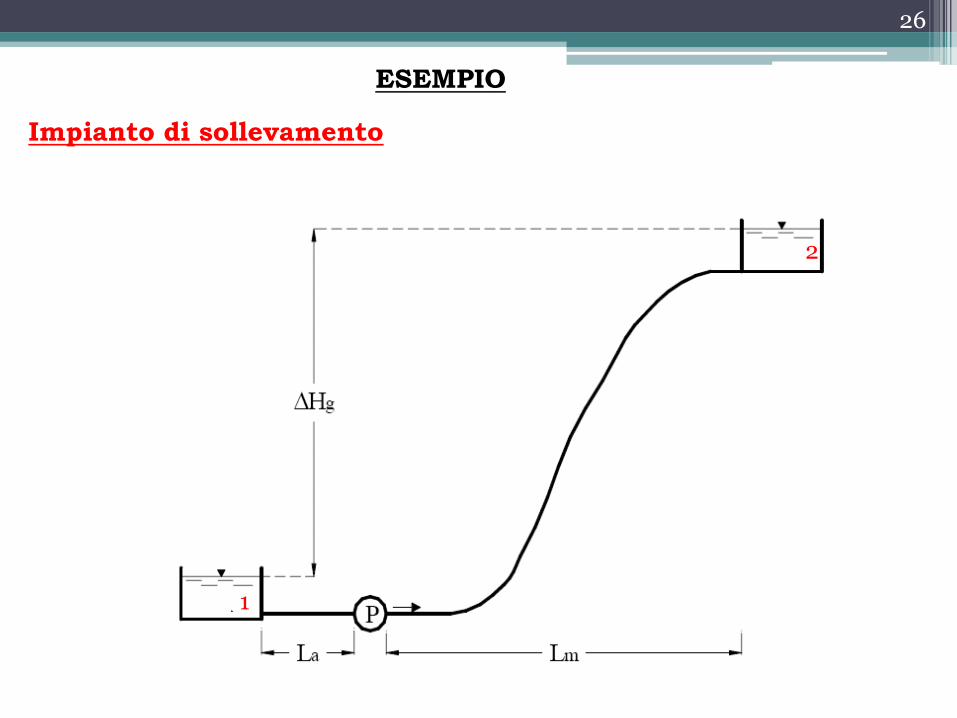
Impianto di sollevamento
ESEMPIO
2
1

27
Si controlla la marcia e l’arresto della pompa utilizzando tipicamente due misure ON/OFF di livello nei serbatoi.
B1
A1
1
Logiche “booleane”
28
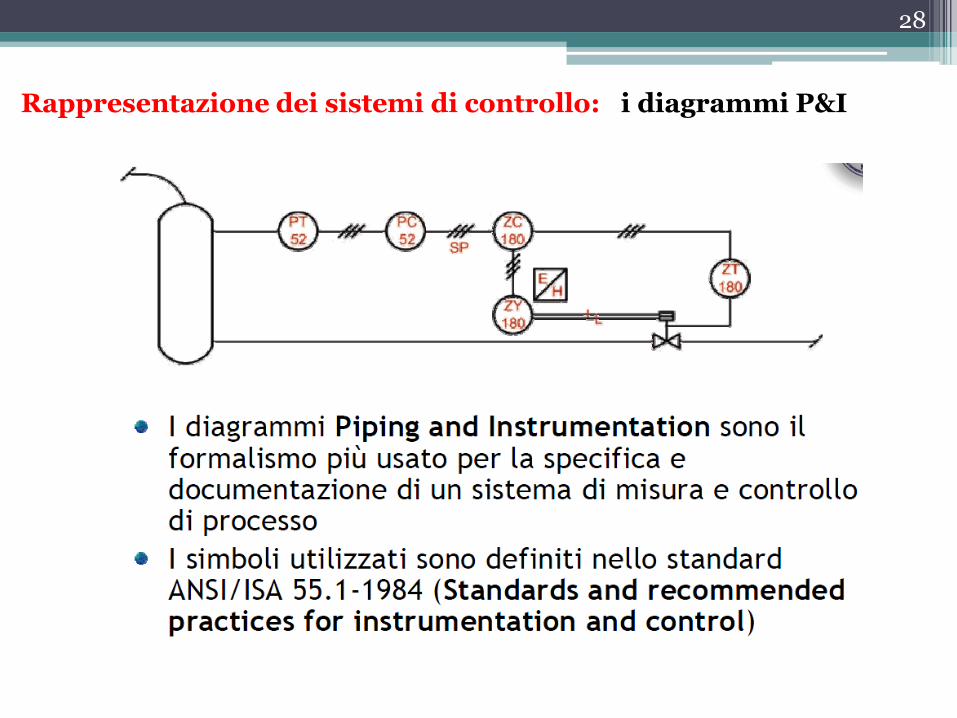
Rappresentazione dei sistemi di controllo: i diagrammi P&I
29
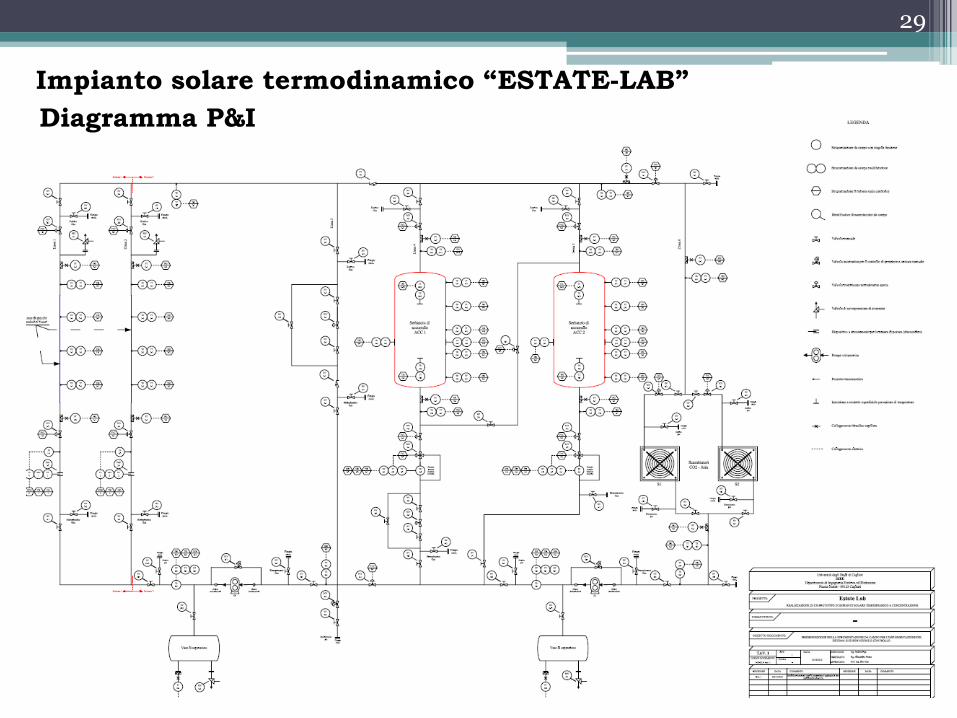
Impianto solare termodinamico “ESTATE-LAB”
Diagramma P&I

30
Verrà modellato e controllato un sistema idraulico sperimentale, interfacciato con un PC e gestito mediante Matlab-Simulink.
Scrittura del modello matematico
Identificazione dei sensori
Identificazione delle elettrovalvole e
delle valvole manuali
Identificazione della pompa
Confronto con i dati sperimentali
Simulazione e realizzazione di
loop di controllo
Esercitazioni in laboratorio

31
a
w
H
V(t) = volume di liquido contenuto nel serbatoio (in m3)
tawHtV H(t) = livello del liquido nel serbatoio (in m)
Serbatoio a sezione costante rettangolare
portate volumetriche in ingresso ed in uscita dal serbatoio (in m3/sec)
tqi
tqu
tqi tqu
tqtqtV ui tqtqtHawtV ui
tqaw
tqaw
tH ui
11
32
H
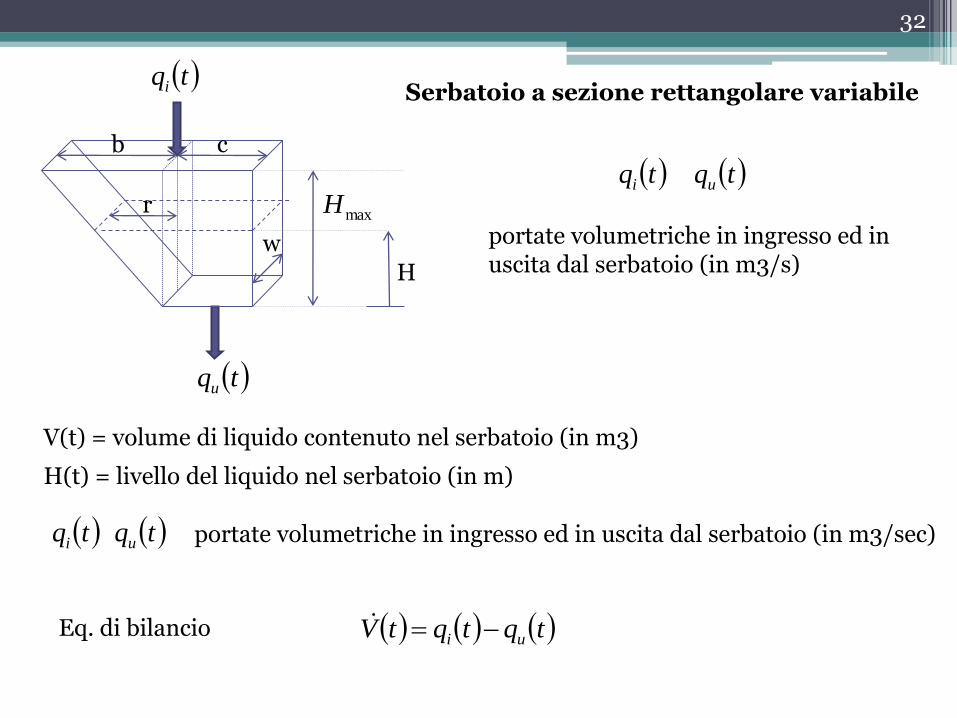
V(t) = volume di liquido contenuto nel serbatoio (in m3)
H(t) = livello del liquido nel serbatoio (in m)
Serbatoio a sezione rettangolare variabile
portate volumetriche in ingresso ed in uscita dal serbatoio (in m3/s)
tqi
tqu
tqi tqu
w
b c
maxH
tqtqtV ui
r
portate volumetriche in ingresso ed in uscita dal serbatoio (in m3/sec) tqi tqu
Eq. di bilancio

33
H
Serbatoio a sezione rettangolare variabile tqi
tqu
w
b c
maxH
tcwHtHH
bwtV 2
max2
r wH
crtV2
2
H
r
H
b
max
HH
br
max
tHcwtHH
bwtV
max
tqtq
cwtHH
bwtH ui
max
1
c

34
MATLAB-SIMULINK
35
MATLAB-SIMULINK
ESEMPIO Regolazione di impianti “turbogas”
per la produzione di energia elettrica
Propulsori per aerei a reazione
(TURBOFAN ENGINES)
Propulsori per veicoli sportivi
Propulsori per grosse navi
Turbine a Gas – Usi civili
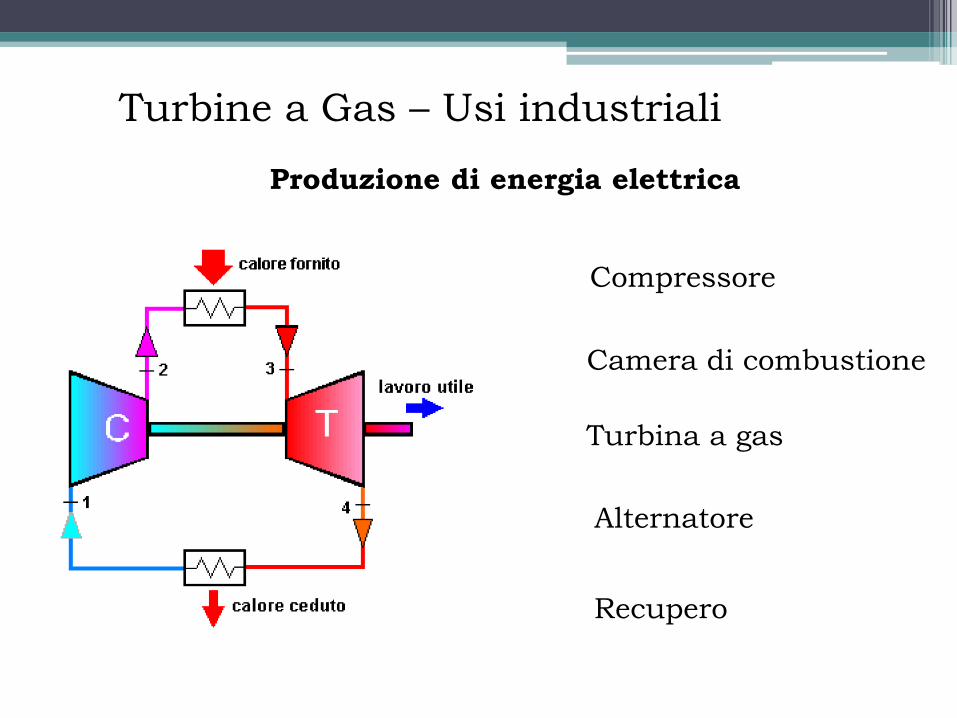
Turbine a Gas – Usi industriali
Produzione di energia elettrica
Compressore
Camera di combustione
Turbina a gas
Alternatore
Recupero

Impianti a ciclo combinato

A. Pisano - DIEE, Cagliari University
Impianti a ciclo combinato
Aspirazione aria

A. Pisano - DIEE, Cagliari University
Compressore,
camera di combustione e
generatore sincrono
Impianti a ciclo combinato

A. Pisano - DIEE, Cagliari University
Produzione di vapore dal calore
residuo dei fumi di scarico
Impianti a ciclo combinato
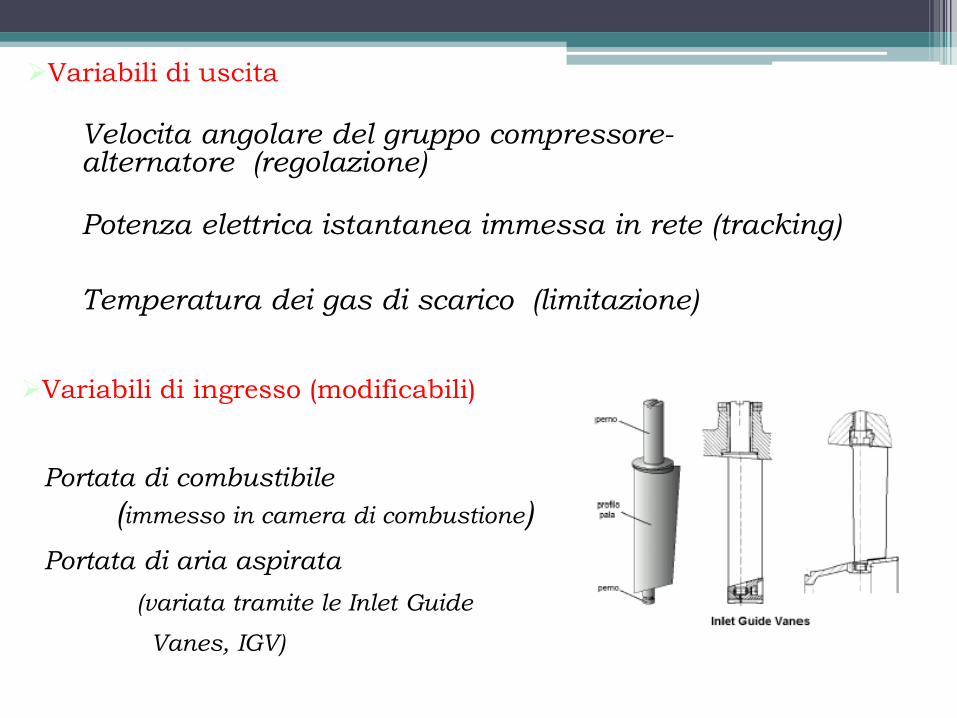
Potenza elettrica istantanea immessa in rete (tracking)
Temperatura dei gas di scarico (limitazione)
Velocita angolare del gruppo compressore-alternatore (regolazione)
Portata di aria aspirata
(variata tramite le Inlet Guide
Vanes, IGV)
Portata di combustibile
(immesso in camera di combustione)
Variabili di uscita
Variabili di ingresso (modificabili)
Modelli e metodologie innovative per il controllo, la diagnostica e la gestione di impianti
termoelettrici combinati gas-vapore in condizioni operative fortemente variabili e perturbate
Strumento di verifica
Modello Simulink validato, realizzato da Ansaldo Energia
Progetto di ricerca (UNICA;UNIGE;AEN;CRS4;)CNR;ISAB;CRIS

Fuel/IGV controller
TF
TFPEL
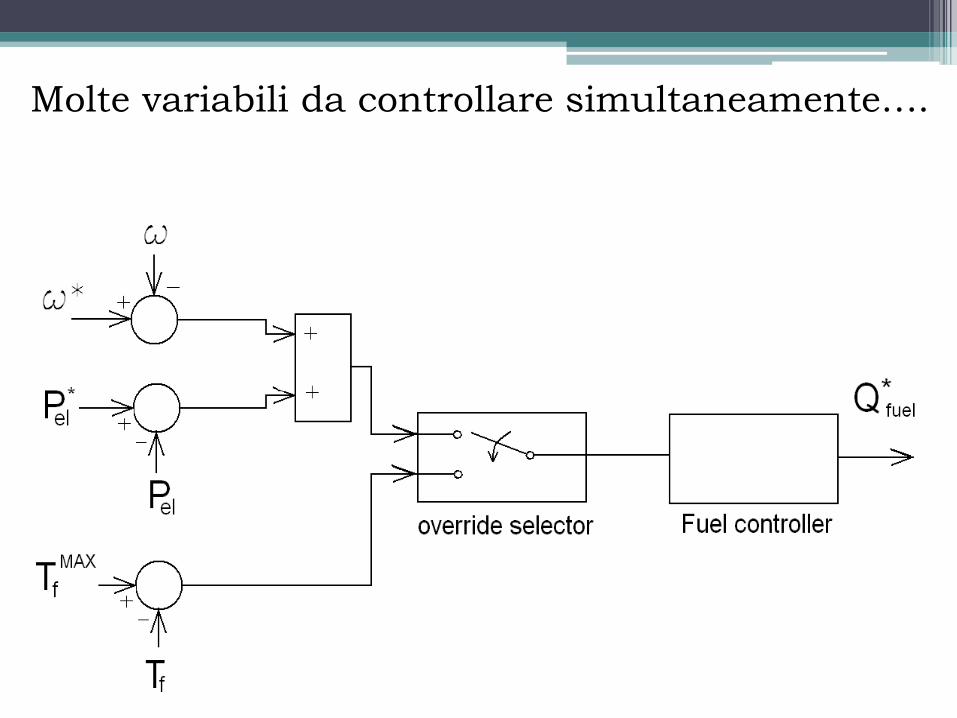
Molte variabili da controllare simultaneamente….
Principali problemi
Taratura complicata per sistemi con molti anelli di controllo
Gestione dei transitori
Nella moderna pratica industriale si impiegano
dei dispositivi di controllo denominati “Controllori PI” (Proporzionali-Integrali)
Deterioramento delle prestazioni al variare delle
condizioni di lavoro dai valori nominali
Saturazione degli attuatori
- Logiche PI con “anti wind-up”
Controllo non lineare robusto

Simulink model of a 400 MW combined cycle power plant
occhio (era 10)
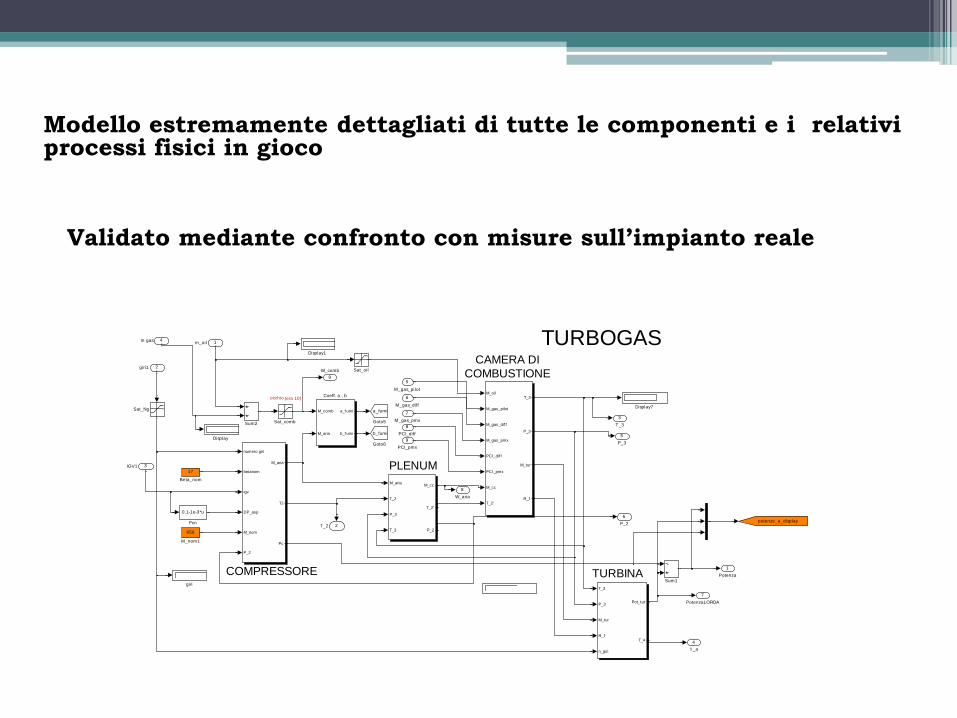
TURBOGAS
COMPRESSORE
PLENUM
CAMERA DI
COMBUSTIONE
TURBINA
9
W_comb
8
W_aria
7
PotenzaLORDA
6
P_2
5
P_3
4
T_4
3
T_3
2T_2
1
Potenza
giriT_3
P_3
M_tur
R_f
n_giri
Pot_tur
T_4
Sum2
Sum1
Sat_oil
Sat_comb
Sat_Ng
M_aria
T_2
P_3
T_3
M_cc
T_2'
P_2656
M_nom1
b_fumi
Goto6
a_fumi
Goto5
potenze_a_display
0.1-1e-3*u
Fcn
Display7
Display1
Display
M_comb
M_aria
a_f umi
b_f umi
Coeff. a , bM_oil
M_gas_pilot
M_gas_dif f
M_gas_pmx
PCI_dif f
PCI_pmx
M_cc
T_2'
T_3
P_3
M_tur
R_f
numero giri
betanom
igv
DP_asp
M_nom
P_2
M_aria
T2
Pc
17
Beta_nom
9
PCI_pmx
8
PCI_diff
7
M_gas_pmx
6
M_gas_diff
5
M_gas_pilot
4m gas
3IGV1
2giri1
1m_oil
Modello estremamente dettagliati di tutte le componenti e i relativi processi fisici in gioco
Validato mediante confronto con misure sull’impianto reale

IGV controller
Tf
Produce il set-point per l’angolo delle IGV (che viene inviato al relativo sistema di controllo di “livello inferiore”) sulla base della misura della temperatura dei gas di scarico.
Contiene controllori PI (con logica anti wind-up)
Fuel controller
Produce il set-point per la portata di comblustibile da immettere in camera di combusitone sulla base della misura della potenza elettrica istantanea, della velocia di rotazione, e della temperatura dei gas di scarico.
Contiene controllori PI (con logica anti wind-up)
50
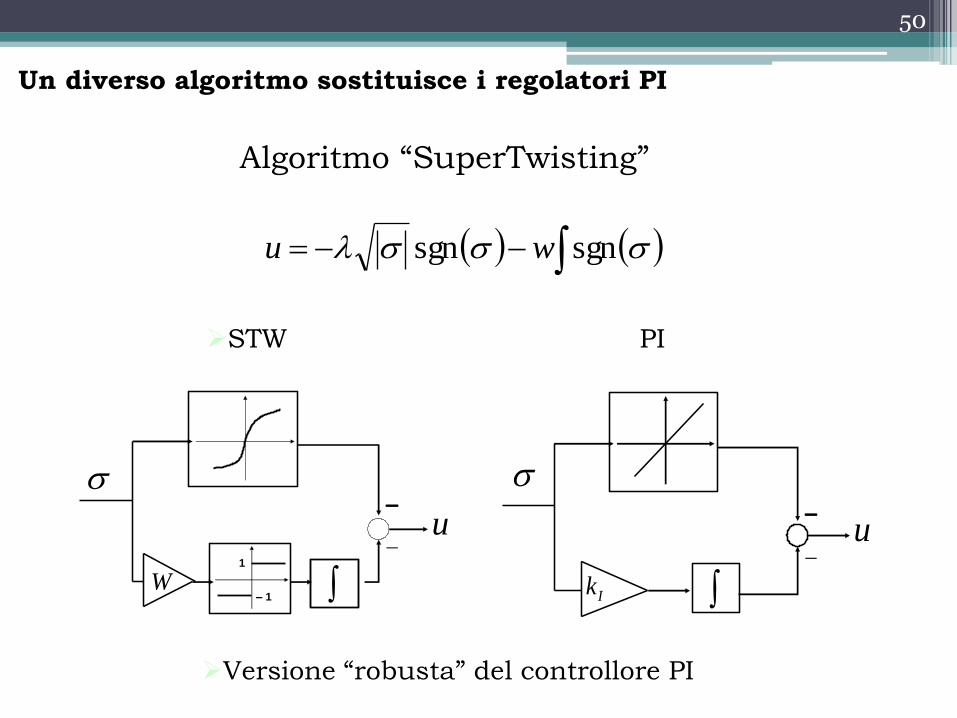
Algoritmo “SuperTwisting”
sgnsgn wu
Ik
u
W
1
1
u
Versione “robusta” del controllore PI
Un diverso algoritmo sostituisce i regolatori PI
STW PI

A. Pisano - DIEE, Cagliari University
Risultati delle simulazioni
Set-point di potenza [100 250 MW]
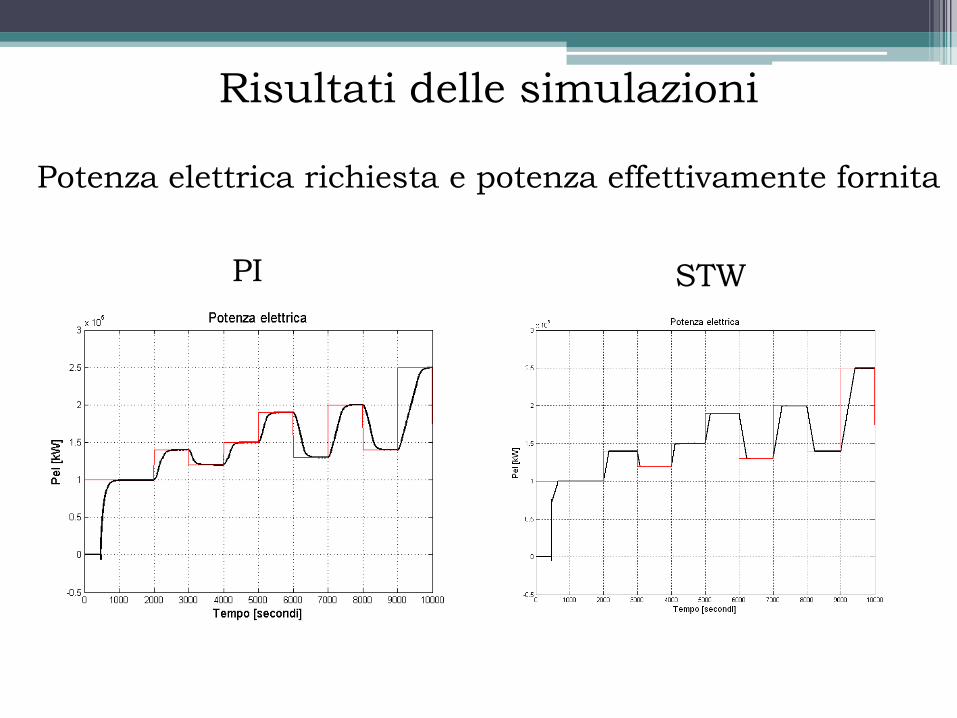
PI
STWPI
Potenza elettrica richiesta e potenza effettivamente fornita
Risultati delle simulazioni
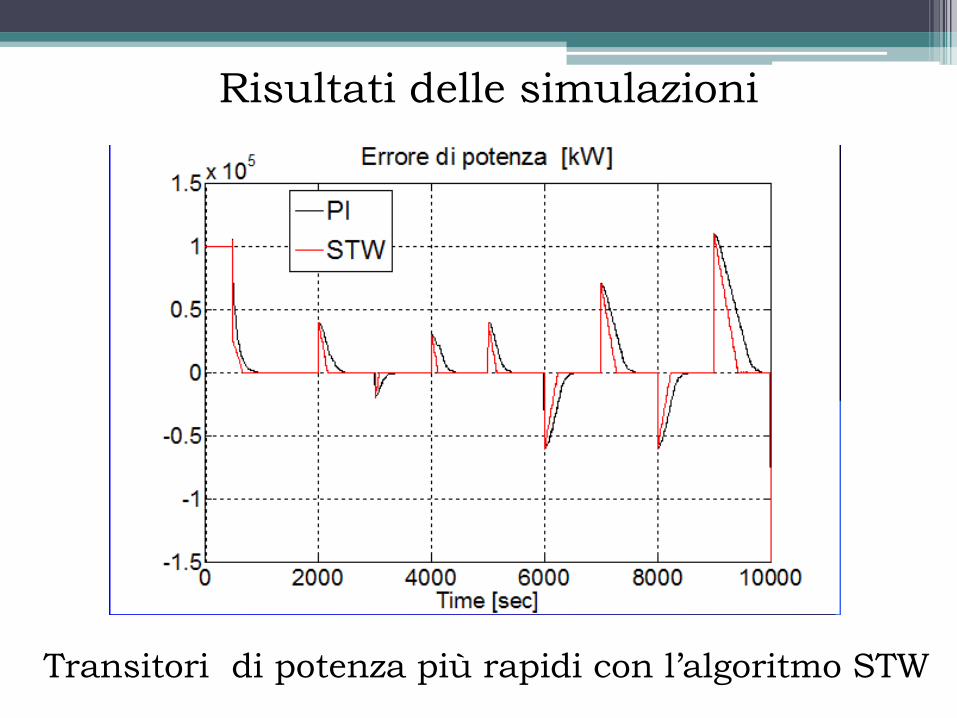
Transitori di potenza più rapidi con l’algoritmo STW
Risultati delle simulazioni
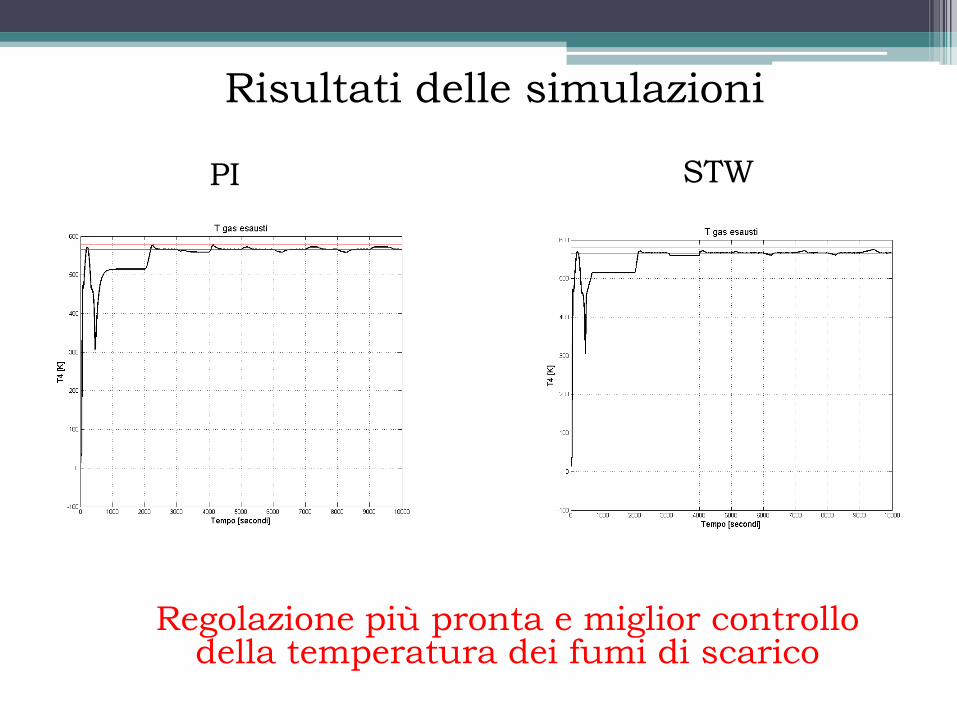
PI
STWPI
Regolazione più pronta e miglior controllo della temperatura dei fumi di scarico
Risultati delle simulazioni








