

Riduzione delle vibrazioni meccaniche sulle macchine
Prof. Giovanni Moschioni
Politecnico di Milano, Dipartimento di Meccanica
Sezione di Misure e Tecniche Sperimentali
Giovanni Moschioni – [email protected]
2Metodi di riduzione delle vibrazioni
Una volta compresi gli elementi fondamentali di un sistema vibrante è possibile passare ai metodi di riduzione delle vibrazioni meccaniche
Esistono due approcci diversi per la riduzione delle vibrazioni:
1.Diminuzione delle vibrazioni alla sorgente
2.Modifica dei vincoli e delle connessioni:
1. Smorzamento delle vibrazioni
2. Sospensione elastica della sorgente

Giovanni Moschioni – [email protected]
3In pratica…
Un esempio noto a tutti è l’automobile. In questo caso le sorgenti di vibrazione primarie sono:
• le irregolarità della strada
• le forze dinamiche generate dal motore
• parti rotanti (es. ruote) non equilibrate

Giovanni Moschioni – [email protected]
4In pratica…
Su ogni auto vengono utilizzati entrambi gli approcci di riduzione alla fonte e disaccoppiamento.
Riduzione alla fonte: Equilibratura di tutte le parti rotanti, es. albero a gomito, pneumatici
Disaccoppiamento elastico: Molle elicoidali nelle sospensioni della vettura, pneumatici in gomma
Smorzamento delle vibrazioni: Elementi smorzanti nelle sospensioni (ammortizzatori), elementi antivibranti

Giovanni Moschioni – [email protected]
5Diminuzione delle vibrazioni alla sorgente
La diminuzione delle vibrazioni alla sorgente non è una via sempre praticabile.
Nell’esempio dell’auto, consideriamo un fuoristrada. La sorgente principale di vibrazioni è la strada (dissestata).
Riduzione delle vibrazioni alla sorgente?
Asfalto su tutte le strade di campagna!
Giovanni Moschioni – [email protected]
6Sospensione elastica
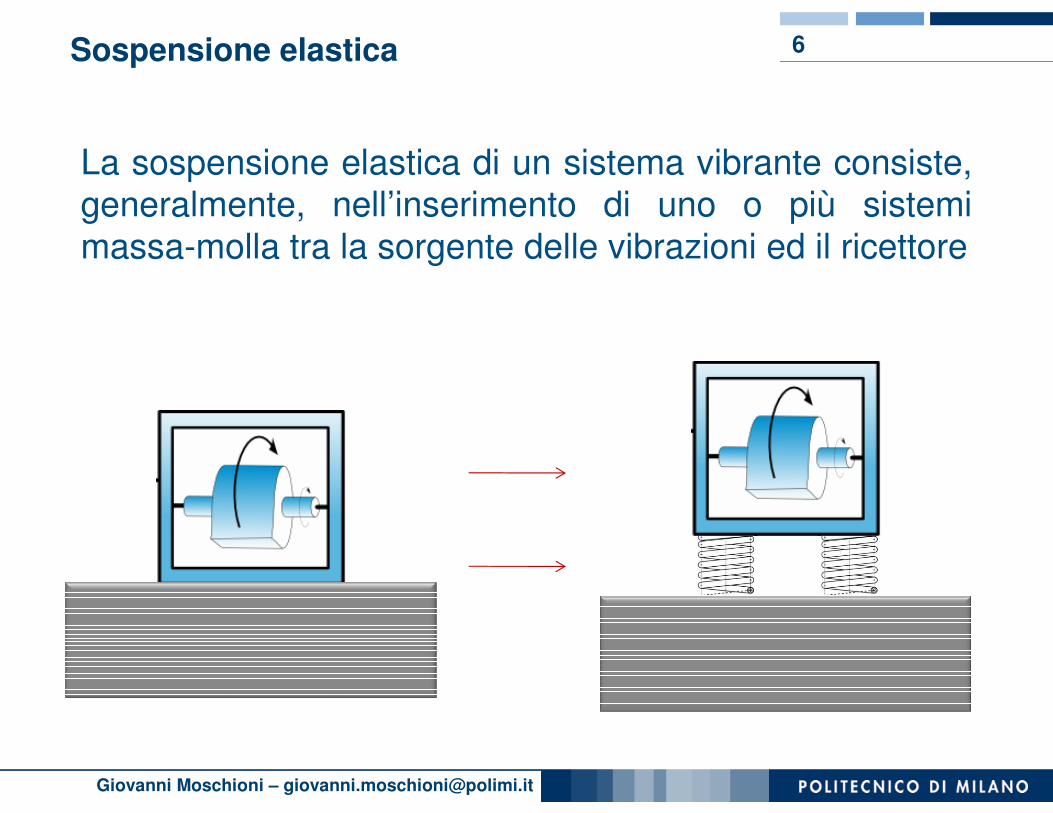
La sospensione elastica di un sistema vibrante consiste, generalmente, nell’inserimento di uno o più sistemi massa-molla tra la sorgente delle vibrazioni ed il ricettore

Giovanni Moschioni – [email protected]
7Sospensione elastica
Il comportamento dinamico è quello del sistema ad un grado di libertà e l’attenuazione delle vibrazioni avviene a frequenze molto superiori a quelle di risonanza

Giovanni Moschioni – [email protected]
8Sospensione elastica
Un’ottima sospensione ha una frequenza di risonanza bassa.
Ciò significa avere masse sospese molto grandi abbinate a rigidezze contenute.
Conoscendo (AVENDO MISURATO) lo spettro della vibrazione di una macchina èpossibile progettare una sospensione ad hoc.
m
k=ω

Giovanni Moschioni – [email protected]
9Spostamento Statico
Se analizziamo la deflessione statica di un sistema molto pesante (m grande) e poco rigido (k piccolo) vediamo come gli spostamenti statici x diventino molto grandi.
Questo in alcuni casi può rappresentare un problema.
mgx
k=

Giovanni Moschioni – [email protected]
10Smorzamento
Altro approccio: inserimento di un elemento dissipativotra la sorgente ed il ricettore.
In pratica si dissipa energia per attrito coulombiano o viscoso. La forma della FDT cambia molto nella zona della risonanza.
2 4 6 8 100
10
20
30
40
50
frequenza [Hz]f
Alti valori di smorzamento riducono il valore di amplificazione

Giovanni Moschioni – [email protected]
11Smorzamento
Inconveniente: alti valori di smorzamento riducono l’efficienza dello smorzatore a frequenze oltre la frequenza di risonanza.

Giovanni Moschioni – [email protected]
12Approccio ibrido
In molti casi pratici il disaccoppiamento viene effettuato sia per via elastica, sia dissipativa.
Si progetta la parte elastica per lavorare nella zona delle fondazioni sospese e l’elemento dissipativo per ridurre le amplificazioni molto elevate che si generano a frequenze vicine a quella di risonanza.
Questo approccio è in sostanza obbligatorio per macchina a regime variabile che attraversano la risonanza

Giovanni Moschioni – [email protected]
13Come si valuta l’efficacia dell’intervento?
La bontà di un intervento di bonifica può essere valutata attraverso la funzione di trasferimento (rapporto tra accelerazione della trasmessa dalla sospensione ed accelerazione originaria della macchina

Giovanni Moschioni – [email protected]
14Trasmissibilità
Si indica con trasmissibilità il modulo delle funzione di trasferimento
0
0.2
0.4
0.6
0.8
1
1.2
1.4
10 100
Tra
smis
sibi
lità
Frequenza [Hz]
Attenuazione vibrazioniAttenuazione vibrazioni
Trasmissione e amplificazione di tutte le
vibrazioni
Trasmissione e amplificazione di tutte le
vibrazioni

Giovanni Moschioni – [email protected]
15In estrema sintesi…
Si può valutare la trasmissibilità anziché in funzione della frequenza sul valore RMS (globale) della vibrazione.
0
5
10
15
20
25
Sospensione 1 Sospensione 2 Sospensione 3
Acc
ele
razi
one
RM
S [m
/s²]
Valore Originale Con Sospensione
Giovanni Moschioni – [email protected]
Bonifica delle vibrazioni 16
Come già visto esistono due vie per diminuire le vibrazioni trasmesse da una macchina vibrante:
•Riduzione delle vibrazioni generate dalla macchina (es. equilibratura di parti vibranti)
•Disaccoppiamento meccanico della macchina dal ricevitore

Giovanni Moschioni – [email protected]
Bonifica delle vibrazioni 17
In molti casi, la riduzione delle vibrazioni generate dalla macchina non è possibile, poiché ciò comporterebbe una diminuzione dell’efficienza della macchina stessa.
Consideriamo, ad esempio, un trapano a percussione. La sua efficienza è basata sulla generazione di vibrazioni alla punta.

Giovanni Moschioni – [email protected]
Quindi? 18
Quindi molto spesso si opta per il disaccoppiamentomeccanico tra la macchina vibrante e recettore.
Si tratta cioè di inserire un sistema meccanico ad un grado di libertà che lavora in regime di fondazione sospesa tra la sorgente di vibrazione e l’operatore …
Sembra difficile, ma la messa in pratica è ovvia

Giovanni Moschioni – [email protected]
Disaccoppiamento meccanico
Sistema originario
Disaccoppiamento
Sistema disaccoppiato

Giovanni Moschioni – [email protected]
20Torniamo al sistema ad un grado di libertà
Cerchiamo di ottimizzare un sistema ad un grado di libertà in modo da farlo lavorare in regime di fondazione sospesa; come? Modifica della pulsazione propria
m
Massa (m)
Rigidezza (k)
Smorzamento (r)
m
k=ω

Giovanni Moschioni – [email protected]
modulo
0123456789
1 10 100
Frequenza [Hz]
Mod
ulo
FR
F
21Fondazione Sospesa
A frequenze molto maggiori di quella di risonanza, il rapporto tra forze della massa e forze trasmesse alla base tende a zero.
Ciò significa che la vibrazione non viene trasmessa alla base e quindi la struttura portante è isolata
Fondazione
sospesa
Giovanni Moschioni – [email protected]
Come si può valutare l’effetto dell’intervento? 22
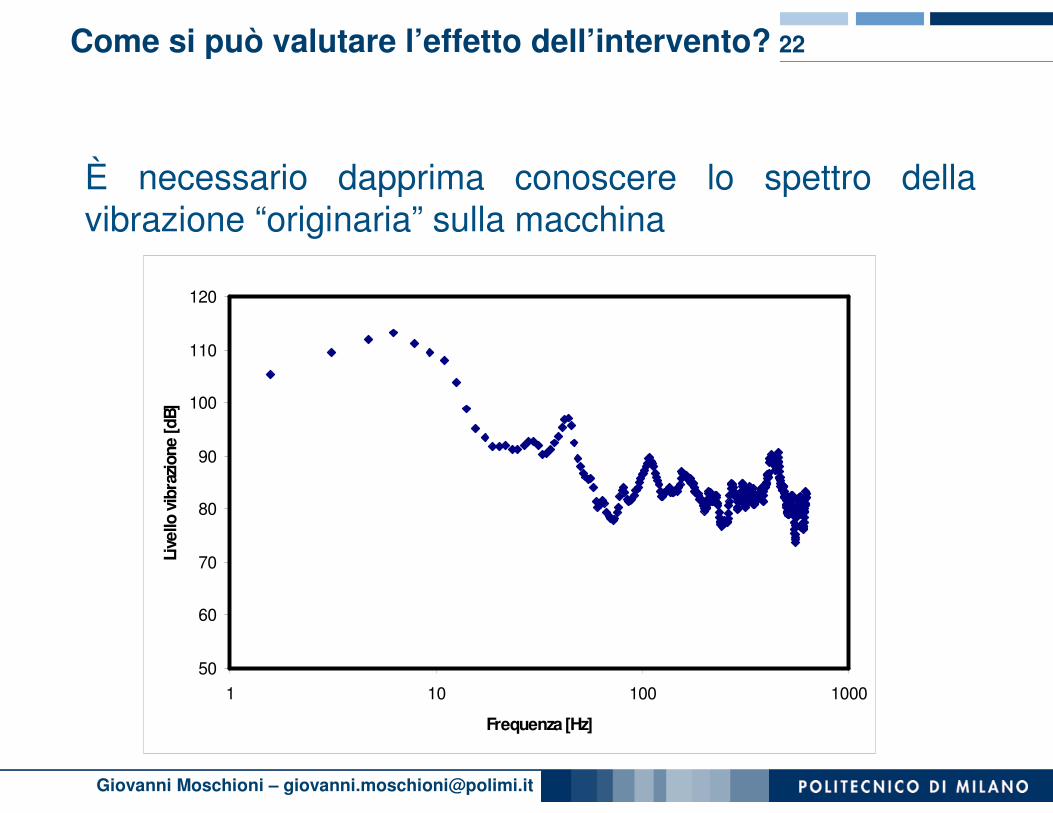
È necessario dapprima conoscere lo spettro della vibrazione “originaria” sulla macchina
50
60
70
80
90
100
110
120
1 10 100 1000
Frequenza [Hz]
Live
llo v
ibra
zione [dB]

Giovanni Moschioni – [email protected]
Funzione di trasferimento 23
Si passa poi a disegnare una funzione di trasferimento in modo tale da attenuare le vibrazioni secondo necessità
-50
-40
-30
-20
-10
0
10
20
1 10 100
Frequenza [Hz]
Mod
ulo
FR
F (
dB)
-30
-25
-20
-15
-10
-5
0
5
1 10 100
Frequenza [Hz]
Mod
ulo
FR
F (
dB)
-50
-40
-30
-20
-10
0
10
20
30
1 10 100
Frequenza [Hz]
Mod
ulo
FR
F (
dB)
In pratica, si sceglie la frequenza di risonanza del sistema a 1 gdlcambiando la rigidezza dell’elemento elastico

Giovanni Moschioni – [email protected]
Stima spettro risultante
-50,00
-30,00
-10,00
10,00
30,00
50,00
70,00
90,00
110,00
130,00
1,000 10,000 100,000
Frequenza [Hz]
Mod
ulo
FR
F (
dB)
LEQ Ponderato con pedana LEQ Ponderato Orig
Si moltiplica lo spettro del segnale per la funzione di trasferimento. Così facendo si stima l’effetto del dispositivo antivibrante

Giovanni Moschioni – [email protected]
Stima sul livello 25
Sommando quadraticamente le singole componenti dello spettro si può determinare il livello ottenibile con il dispositivo anti vibrazioni (AVD)
LEQ Orig 1,45
LEQ con AVD 0,65

Giovanni Moschioni – [email protected]
Esempi ... 26
Passiamo ora ad alcuni esempi di interventi di bonifica dalle vibrazioni meccaniche

Riduzione delle vibrazioni corpo intero su carrelli elevatori frontali

Giovanni Moschioni – [email protected]
Il problema
• I livelli di vibrazione misurati su una serie di carrelli trasportatori sono piuttosto elevati.
• Le frequenze sono concentrate tra 8 e 20 Hz
LeqLin
00,10,20,30,40,50,60,70,80,9
1
1,000 10,000 100,000
Frequenza [Hz]
Vib
razi
one
[m/s
^2]
Giovanni Moschioni – [email protected]
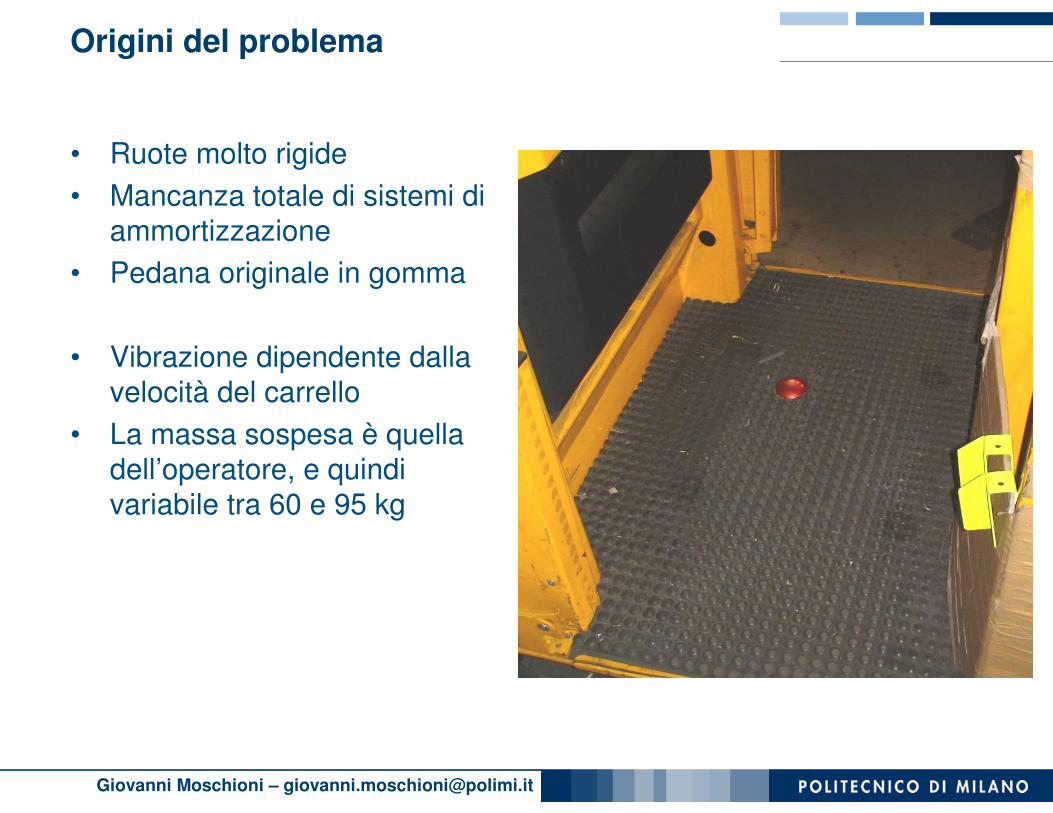
Origini del problema
• Ruote molto rigide• Mancanza totale di sistemi di
ammortizzazione• Pedana originale in gomma
• Vibrazione dipendente dalla velocità del carrello
• La massa sospesa è quella dell’operatore, e quindi variabile tra 60 e 95 kg

Giovanni Moschioni – [email protected]
Soluzione proposta
Pedana in legno con quattro supporti (vibrostop) la cui rigidezza è stata scelta in modo da avere una frequenza di risonanza pari a 4-5 Hz.
Frequenze inferiori abbassano il comfort di marcia ed introducono una sensazione di instabilità fastidiosa per il conducente
Accelerometro Pedana
Riferimento

Giovanni Moschioni – [email protected]
Soluzione proposta
Partendo dai dati tecnici degli antivibranti è possibile determinare la rigidezza statica, che fornisce un valore indicativo per poter modellare il fenomeno in esame

Giovanni Moschioni – [email protected]
Con Operatore
Le sensazioni soggettive da parte dei conducenti sono state molto positive. Le FRF tra gli accelerometri alla base della pedana e sulla pedana stessa hanno mostrato l’efficienza del metodo proposto.

Giovanni Moschioni – [email protected]
Risultati sperimentali
Figura 4a - Spettri medi delle vibrazioni verticali rilevate sulla tavola D
e sulla struttura del carrello (altezza 0 cm)
0,0
0,1
0,2
0,3
0,4
0,5
0,6
0,7
0,8
0,9
0,5 0,8 1,25 2 3,5 5 8 12,5 20 31,5 50 80 125 200 315
Frequenza [Hz]
Acc
eler
azio
ne
[m/s
²]
sulla tavola D
sulla struttura del carrello
Un limite all’efficienza delle pedane è dato dalla dipendenza della frequenza di taglio dalla massa dell’operatore

Giovanni Moschioni – [email protected]
Risultati sperimentali (2)
La riduzione dell’accelerazione ponderata è comunque soddisfacente.
Le riduzioni di accelerazione variano tra il 10 ed il 25%.
Un’ottimizzazione con ammortizzatori ad aria compressa ètuttavia ancora possibile

Riduzione delle vibrazioni su martelletti pneumatici

Giovanni Moschioni – [email protected]
Il problema
I martelletti pneumatici sono spesso usati nella lavorazione di materiali lapidei, sia per fini artistici sia nell’ambito delle costruzioni
Essi sono caratterizzati dal movimento alternativo dell’utensile
Le vibrazioni all’impugnatura sono decisamente elevate

Giovanni Moschioni – [email protected]
Metodo Proposto
Lo scalpello è stato disaccoppiato meccanicamente dalla mano dell’operatore
Il prototipo è stato caratterizzato sia in laboratorio sia durante la lavorazione.
La funzione di trasferimento del dispositivo anti vibrante è stata determinata in laboratorio
Esperimenti sono stati effettuati da diversi operatori in condizioni di lavoro

Giovanni Moschioni – [email protected]
Il martelletto pneumatico
Il pistone interno genera delle forze di inerzia.
Tali forze vengono trasmesse in parte al pezzo da lavorare ed in parte all’operatore.

Giovanni Moschioni – [email protected]
AVD
Schema a parametri concentrati
Workforce
ProcessedMaterial
Impedance
HammerInternalforce
HammerInertial
Impedance
InertialSleeve
Impedance
Z Hand Arm
ElasticSleeve
ImpedanceScalpelImpedance
La forza trasmessa al sistema mano braccio dipende dal rapporto tra l’impedenza dell’utensile e quella del sistema mano-braccio
È possibile ridurre le forze che giungono all’operatore?
Ovviamente si, con un dispositivo anti vibrazioni (AVD)

Giovanni Moschioni – [email protected]
Come realizzarlo?
Un manicotto coassiale col martelletto pneumatico, accoppiato ad esso mediante due molle elicoidali.
Lo smorzamento è dato dall’attrito secco tra molla e manicotto

Giovanni Moschioni – [email protected]
Test di laboratorio
Stima della funzione di trasferimento su diversi modelli di utensile
0
0.5
1
1.5
2
2.5
3
3.5
10 100 1000Frequency [Hz]
FR
F
model 1 model 2 scalpel

Giovanni Moschioni – [email protected]
Risultati sperimentali
0
5
10
15
20
25
Model 1 Model 2 Tool
Pneumatic Hammer
Wei
ghte
d A
ccel
erat
ion
[m/s
²]
Without AVD [m/s²] With AVD [m/s²]
La stessa operazione è stata svolta con e senza il dispositivo anti vibrazioni:
Le riduzioni variano tra il 60 e l’80 %

Giovanni Moschioni – [email protected]
Risultati sperimentali
La riduzione è cospicua specialmente per le componenti in alta frequenza.
90
100
110
120
130
140
150
160
2 4 8 16 31.5 63 125 250 500 1k 2k 4kFrequency [Hz]
Acc
eler
atio
n Le
vel [
dB]
Without AVD With AVD

Riduzione delle vibrazioni su un avvitatorepneumatico

Giovanni Moschioni – [email protected]
L’utensile 45
Massa oltre 10 kgVibrazioni alla maniglia: oltre 12 m/s²

Giovanni Moschioni – [email protected]
Come procedere? 46
• Caratterizzazione della vibrazione generata� Ripetibilità� Effetto Pressione Alimentazione� Posizione Accelerometro� Catena di Misura
• Progettazione Sistemi Smorzanti� Caratterizzazione in laboratorio� Prove di avvitamento

Giovanni Moschioni – [email protected]
Analisi Preliminari 47
• Nella prima fase della sperimentazione sono state effettuate analisi per identificare l’effetto della pressione di alimentazione, dell’asse di avvitamento, della posizione di fissaggio dell’accelerometro, ecc.
• Supporto per l’avvitamento in acciaio e legno

Giovanni Moschioni – [email protected]
Setup Sperimentale 48
• Accelerometro Piezoelettrico in Carica (ICP 10 mv/g saturano)
• Strumentazione Virtuale
• Avvitatore Sospeso mediante Fune
• Pressione di alimentazione fino a 10 Bar

Giovanni Moschioni – [email protected]
Effetto Pressione di Alimentazione 49
0.0
1.0
2.0
3.0
4.0
5.0
6.0
7.0
8.0
9.0
10.0
5 5.5 6 6.5 7 7.5
Acc
ele
razi
one P
ondera
ta (
m/s
2)
Pressione (bar)
RMSX RMSY RMSZ Aw
• La vibrazione aumenta all’aumentare della pressione di alimentazione

Giovanni Moschioni – [email protected]
Effetto Pressione di Alimentazione 50
• Anche la frequenza di rotazione dell’avvitatore dipende dalla pressione (progettazione sospensione difficoltosa)
0
2
4
6
8
10
12
5.00 5.50 6.00 6.50 7.00 7.50 8.00 8.50
Frequenza
perc
uss
ione [
Hz]
Pressione (bar)
Giovanni Moschioni – [email protected]
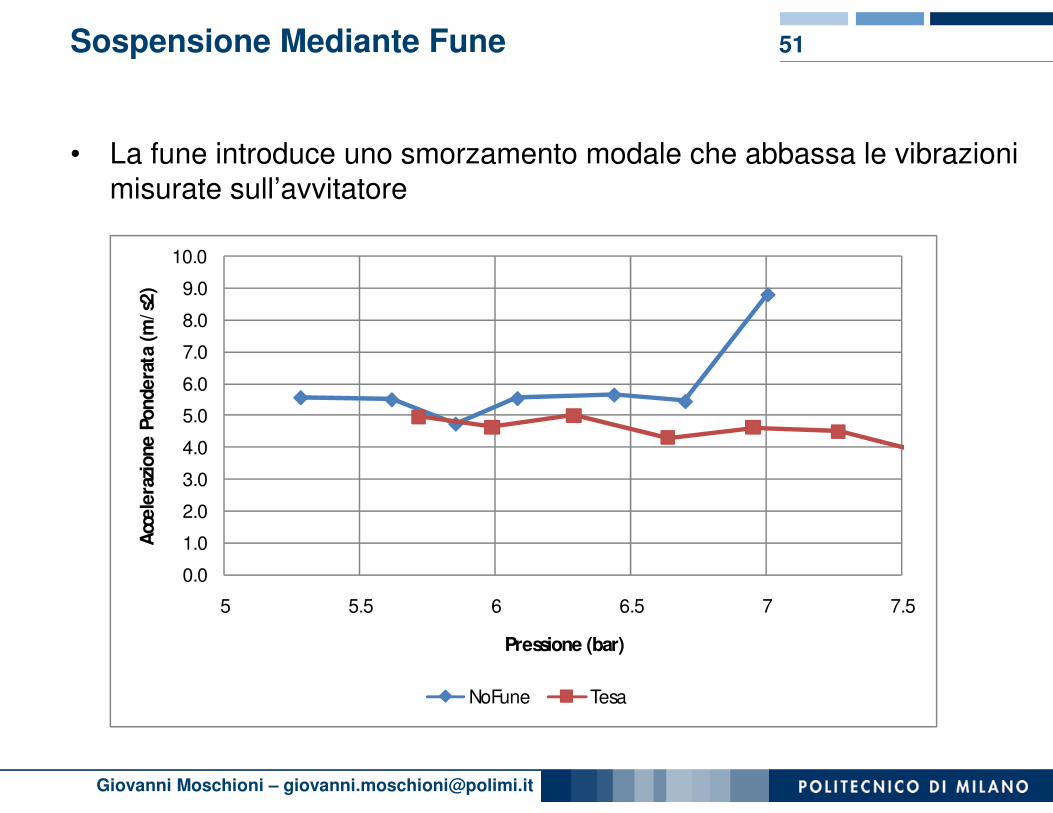
Sospensione Mediante Fune
• La fune introduce uno smorzamento modale che abbassa le vibrazioni misurate sull’avvitatore
51
0.0
1.0
2.0
3.0
4.0
5.0
6.0
7.0
8.0
9.0
10.0
5 5.5 6 6.5 7 7.5
Acc
ele
razi
one P
ondera
ta (
m/s
2)
Pressione (bar)
NoFune Tesa

Giovanni Moschioni – [email protected]
Progettazione sistema smorzante
• Spesso non si conoscono i parametri di rigidezza-smorzamento dei materiali, è quindi necessario caratterizzarli.
• Per questo motivo è stato caratterizzato un polimero a celle chiuse.
• Test su shaker, materiale chiuso a sandwich tra due flange rigide in alluminio
52

Giovanni Moschioni – [email protected]
Effetto del precarico 53
0.01
0.1
1
10 100 1000
Mod
ulo
FRF
Frequenza [Hz]
Funzione di trasferimento - stimolo a 10 m/s² 874 g 1874 g 2874 g

Giovanni Moschioni – [email protected]
Rigidezza Normalizzata 54
Codice Prova Acc RMS [m/ s²] Massa (g) f risonanza
media [Hz] dev.st [Hz] µ/σµ/σµ/σµ/σ Rigidezza
Rigidezza normalizzata
(MN/ m³]
2-874 2 874 83.17 1.41 1.70 2.39E+05 7.60
2-1874 2 1874 57.81 0.43 0.74 2.47E+05 7.87
2-2874 2 2874 48.19 1.09 2.27 2.63E+05 8.39
10-874 10 874 76.24 2.63 3.45 2.01E+05 6.38
10-1874 10 1874 54.43 2.04 3.75 2.19E+05 6.98
10-2874 10 2874 43.80 1.26 2.89 2.18E+05 6.93
15-874 15 874 73.21 1.73 2.37 1.85E+05 5.89
15-1874 15 1874 49.26 1.81 3.67 1.80E+05 5.71
15-2874 15 2874 41.89 1.51 3.60 1.99E+05 6.34

Giovanni Moschioni – [email protected]
Rigidezza Normalizzata 55
3
4
5
6
7
8
9
0 500 1000 1500 2000 2500 3000 3500
Rig
idezz
a [M
N/m
³]
Massa [g]
2 10 15

Giovanni Moschioni – [email protected]
Primo Prototipo
• Involucro applicato sulla maniglia originale
• Strato esterno protettivo in teflon
• Testati diversi spessori
• Con e senza strato protettivo in teflon
• Misura simultanea su due accelerometri
• Riduzione vibrazione 30 – 40 %
• Scarsa ergonomia
56

Giovanni Moschioni – [email protected]
Riassunto Dati 57
• Riduzione a valori inferiori rispetto a quelli di intervento
• Buon comportamento da un punto di vista di riduzione vibrazioni
• Scarsa ergonomia dell’impugnatura
• Comportamento migliore senza teflon (valori inferiori a 4 m/s2)
Valori con Ammortizzatore Valori su ManigliaMedia aw8 4.21 7.04
Scarto tipo aw8 0.30 0.25
max aw8 4.57 7.30
min aw8 3.92 6.81
Giovanni Moschioni – [email protected]
Primo prototipo maniglia
• Per ovviare alla scarsa ergonomia è necessario progettare una maniglia di nuova concezione
• Meccanicamente disaccoppiata dalla maniglia
• Applicabile a impugnature di forma diversa
• Analisi preliminari di fattibilità
58

Giovanni Moschioni – [email protected]
Progetti Maniglie 59
• Prototipi per testare la validità della soluzione proposta

Giovanni Moschioni – [email protected]
Simulazioni numeriche sull’effetto della maniglia
61
0.001
0.01
0.1
1
10
1 10 100
0.00
0.20
0.40
0.60
0.80
1.00
1.20
1.40
1.00 10.00 100.00
Xw Yw Zw
• Spettri Ponderati FRF Maniglia+

Giovanni Moschioni – [email protected]
Risultati
• Riduzione cospicua delle vibrazioni• Risultati senza fune ad una sola mano
63
0
2
4
6
8
10
12
14
16
18
4 4.5 5 5.5 6 6.5 7 7.5
Acc
ele
razi
one P
ondera
ta
Pressione
Su Avvitatore Su Maniglia

Giovanni Moschioni – [email protected]
Risultati Preliminari
• L’efficienza sembra aumentare con la pressione
• Questo può essere spiegato con l’aumento della frequenza di avvitamento all’aumentare della pressione
• Aumentando la frequenza aumenta anche l’efficienza della maniglia
64
0
10
20
30
40
50
60
4 4.5 5 5.5 6 6.5 7 7.5
Riduzione Percentuale (%)
Pressione
Riduzione percentuale vibrazione
La maniglia lavora meglio in condizioni più severe

Giovanni Moschioni – [email protected]
Conclusioni prototipo
• Sembra possibile diminuire l’accelerazione trasmessa al sistema mano braccio mediante l’uso di una maniglia ausiliaria
• Le prime prove hanno mostrato riduzioni consistenti del valore di accelerazione ponderata
• L’ergonomia della maniglia è migliorabile
• Il disegno è ottimizzabile sfruttando le peculiarità di altri materiali ammortizzanti
• Studio di soluzioni ibride
• Migliorie nel sistema di fissaggio

Giovanni Moschioni – [email protected]
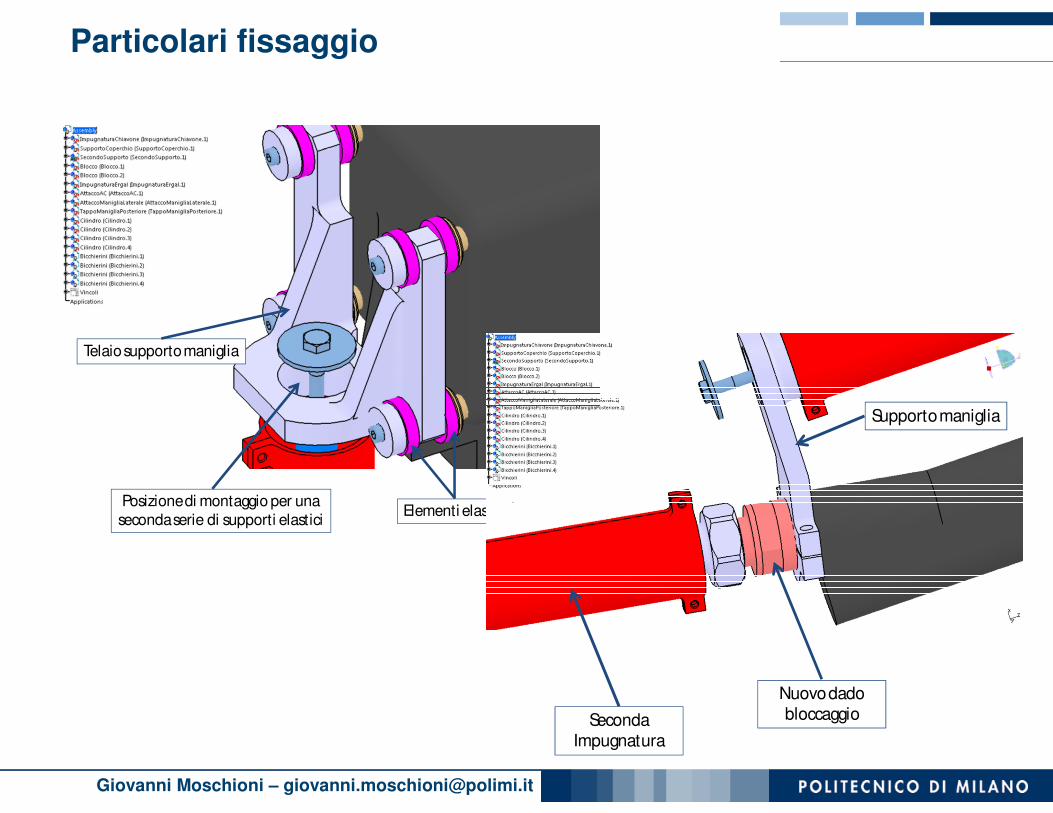
Realizzazione Maniglia definitiva
• Vista la necessità di poter impugnare l’utensile con due mani è stato disegnato un nuovo sistema antivibrante
• Le impugnature (in rosso) sono collegate all’avvitatore mediante strutture di fissaggio (grigie) che sfruttano punti di attacco al telaio giàesistenti.
• L’approccio consente di evitare modifiche strutturali all’utensile stesso.
Giovanni Moschioni – [email protected]
Particolari fissaggio
Elementi elastici
Telaio supporto maniglia
Posizione di montaggio per unaseconda serie di supporti elastici
Supporto maniglia
Nuovo dado bloccaggioSeconda
Impugnatura

Giovanni Moschioni – [email protected]
Realizzazione Prototipo
• Il prototipo è stato realizzato e testato.
• Un leveraggio è stato progettato per consentire un azionamento agevole dell’avvitatore.
• I test di avvitamento sono stati eseguiti da diverse persone

Giovanni Moschioni – [email protected]
Geometria degli antivibranti
• Il disegno si è basato sull’analisi ad elementi finiti, che ha tuttavia mostrato alcuni limiti dovuti alla difficoltà di modellazione del contatto gomma – acciaio.
• Si è quindi optato per il disegno di supporti molto cedevoli, aventilunghezza ridotta. In tal modo è possibile ottenere la rigidezza desiderata inserendo, eventualmente, più elementi elastici in parallelo.
• Antivibranti in gomma a bassa durezza shore tagliati mediante Waterjet

Giovanni Moschioni – [email protected]
Test di avvitamento – Asse Verticale
6.6
4.9
8.0
11.6
5.5
5.3
5.9
10.1
0
2
4
6
8
10
12
Op. 1 Op. 2 Op. 3 Originali
Acc
ele
razi
one [
m/s
² pondera
ti]
Vibrazione alla ManigliaImpugnatura Principale Tubo Aria

Giovanni Moschioni – [email protected]
Test di avvitamento – Asse Orizzontale
6.6 7.6
5.9
15.7
5.0
4.0
6.7
13.3
0
2
4
6
8
10
12
14
16
Op. 1 Op. 2 Op. 3 Originali
Acc
ele
razi
one [
m/s
² pondera
ti]
Vibrazione alla ManigliaImpugnatura Principale Tubo Aria

Giovanni Moschioni – [email protected]
Riduzione delle vibrazioni su una presa multiasse automatica per legno
Giovanni Moschioni – [email protected]
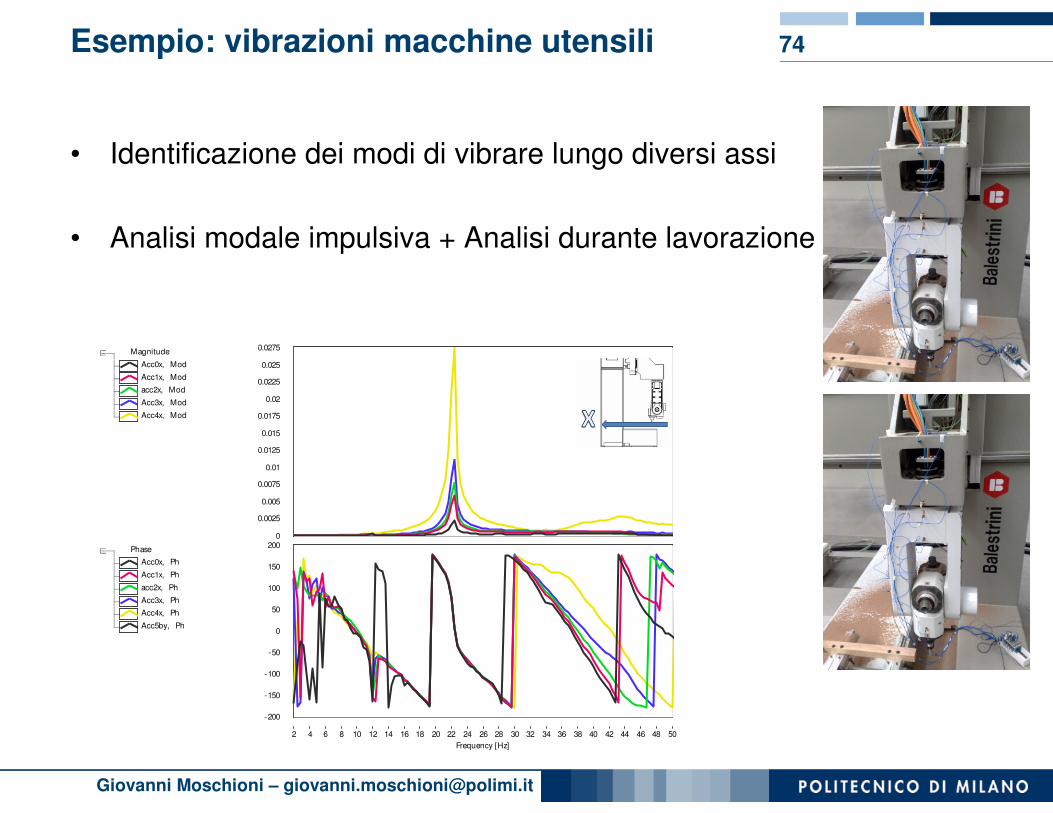
Esempio: vibrazioni macchine utensili
• Identificazione dei modi di vibrare lungo diversi assi
• Analisi modale impulsiva + Analisi durante lavorazione
74
Phase
Acc0x, Ph
Acc1x, Ph
acc2x, Ph
Acc3x, Ph
Acc4x, Ph
Acc5by, Ph
0.0275
0
0.0025
0.005
0.0075
0.01
0.0125
0.015
0.0175
0.02
0.0225
0.025
200
-200
-150
-100
-50
0
50
100
150
Frequency [Hz]502 4 6 8 10 12 14 16 18 20 22 24 26 28 30 32 34 36 38 40 42 44 46 48
Magnitude
Acc0x, Mod
Acc1x, Mod
acc2x, Mod
Acc3x, Mod
Acc4x, Mod
Giovanni Moschioni – [email protected]
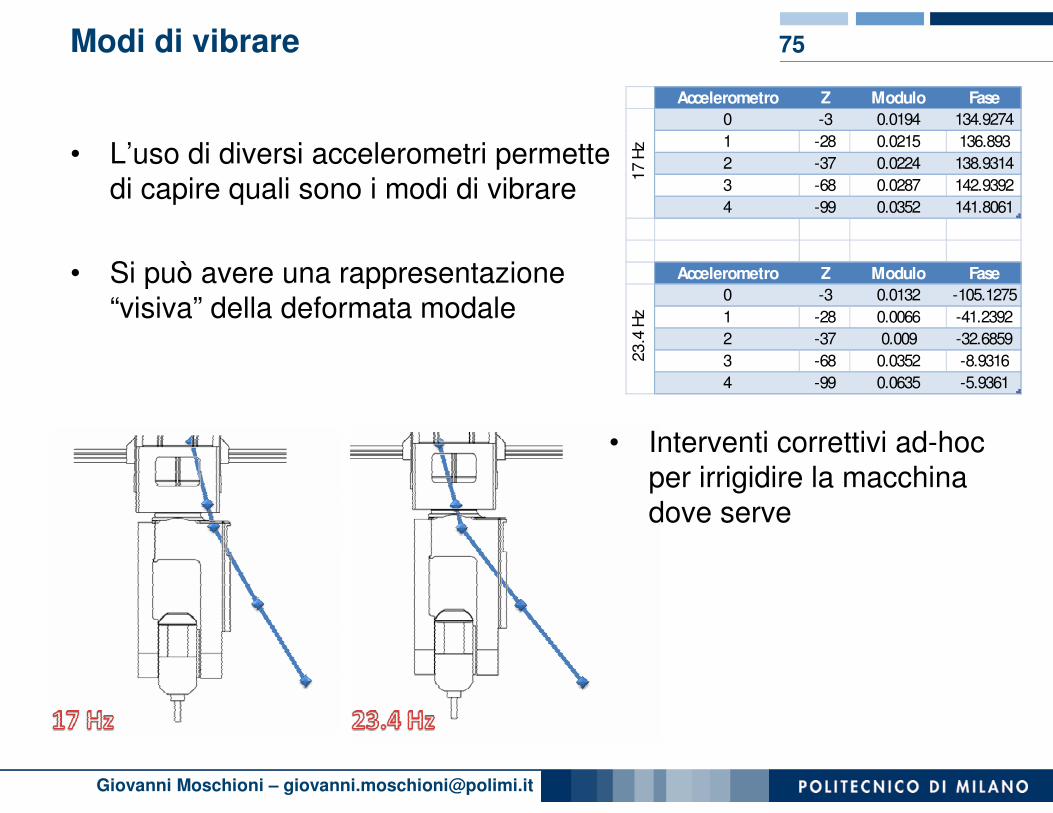
Modi di vibrare
• L’uso di diversi accelerometri permette di capire quali sono i modi di vibrare
• Si può avere una rappresentazione “visiva” della deformata modale
75
Accelerometro Z Modulo Fase
0 -3 0.0194 134.92741 -28 0.0215 136.8932 -37 0.0224 138.93143 -68 0.0287 142.93924 -99 0.0352 141.8061
Accelerometro Z Modulo Fase
0 -3 0.0132 -105.12751 -28 0.0066 -41.23922 -37 0.009 -32.68593 -68 0.0352 -8.93164 -99 0.0635 -5.9361
17 H
z23
.4 H
z
• Interventi correttivi ad-hocper irrigidire la macchina dove serve

Giovanni Moschioni – [email protected]
Sistema continuo: n gradi di libertà 76
Phase
Acc5by, Ph
Acc5cy, Ph
Acc7by, Ph
Acc8by, Ph
Acc8cy, Ph
Acc5y, Ph
Acc6y, Ph
Acc7y, Ph
Acc8y, Ph
Acc9y, Ph
0.035
0
0.0025
0.005
0.0075
0.01
0.0125
0.015
0.0175
0.02
0.0225
0.025
0.0275
0.03
0.0325
200
-200
-150
-100
-50
0
50
100
150
Frequency [Hz]502 4 6 8 10 12 14 16 18 20 22 24 26 28 30 32 34 36 38 40 42 44 46 48
Magnitude
Acc5by, Mod
Acc5cy, Mod
Acc7by, Mod
Acc8by, Mod
Acc8cy, Mod
Acc5y, Mod
Acc6y, Mod
Acc7y, Mod
Acc8y, Mod
Acc9y, Mod

Giovanni Moschioni – [email protected]
Ulteriori analisi: traiettorie utensile in risonanza
77
700.97u
-718.24u
-600u
-500u
-400u
-300u
-200u
-100u
0
100u
200u
300u
400u
500u
600u
X922.68u-969.6u -800u -600u -400u -200u 0 200u 400u 600u 800u
60u
-60u
-55u
-50u
-45u
-40u
-35u
-30u
-25u
-20u
-15u
-10u
-5u
0
5u
10u
15u
20u
25u
30u
35u
40u
45u
50u
55u
X60u-60u -50u -40u -30u -20u -10u 0 10u 20u 30u 40u 50u
• Fenomeni completamente diversi a seconda che la lavorazione sia effettuata in concordanza o in opposizione
• Accoppiamento modi con frequenze vicine
Giovanni Moschioni – [email protected]
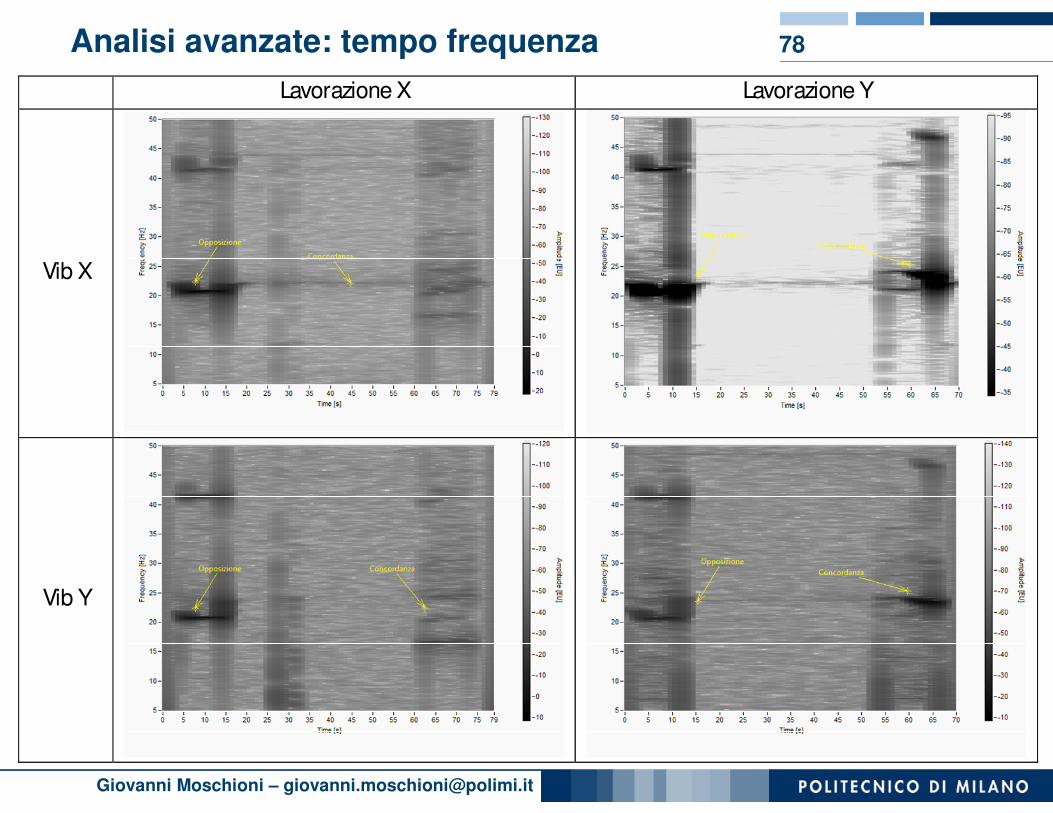
Analisi avanzate: tempo frequenza 78
Lavorazione X Lavorazione Y
Vib X
Vib Y

Giovanni Moschioni – [email protected]
Esempio: lavatrice industriale su trave 79
• Sono dati: frequenza propria della trave 6.3 Hz• Lunghezza della trave 20 m• Centrifuga 380 giri/minuto (6.3 Hz)• Massa lavatrice in ordine di marcia 2760 kg
• In che condizioni siamo?• Come ridurre le vibrazioni?
2 4 6 8 100
10
20
30
40
50
frequenza [Hz]
X/Y
": m
od
ulo
[m
m/m
m]
FdT1 f( )
FdT2 f( )
FdT3 f( )
FdT4 f( )
f
?
?
?










