

UNIVERSITÀ DEGLI STUDI DI PADOVA
FACOLTÀ DI INGEGNERIA
DIPARTIMENTO DI INGEGNERIA DELL’INFORMAZIONE ____________________________________________________
TESI DI LAUREA MAGISTRALE IN BIOINGEGNERIA
SVILUPPO DI UN TOOL CON SMART ANALYZER PER L’APPLICAZIONE DELLA CALIBRAZIONE MULTIPLA ALLA STIMA
DELLA CINEMATICA DELL’ARTO SUPERIORE
Relatore: Ch.mo Prof. Claudio Cobelli Correlatori : Ing. Zimi Sawacha Diego Crovato, BTS
Laureando: Nicola Ferdinando Tonellotto
Anno Accademico 2012-2013




Indice INTRODUZIONE ……………………………………………………………… 1
Capitolo 1. L’AZIENDA BTS …………………………………………………. 3
1.1 Presentazione ……………………………………………………………….. 3
1.2 Attività e prodotti …………………………………………………………… 4
1.3 Aree di interesse …………………………………………………………….. 4
1.3.1 BTS nella Medicina ………………………………………………… 4
1.3.2 BTS nello Sport …………………………………………………….. 5
1.3.3 BTS nella Ricerca …………………………………………………... 5
1.4 Il sistema Smart .…………………………………………………………….. 5
1.4.1Smart Capture ……………………………………………………….. 6
1.4.2 Smart Tracker ………………………………………………………. 7
1.4.3 Smart Analyzer ……………………………………………………... 8
Capitolo 2. ANALISI DEL MOVIMENTO ………………………………….. 9
2.1 Introduzione ………………………………………………………………… 9
2.2 Sistemi optoelettronici ……………………………………………………… 11
2.2.1 Telecamere/Sensori …………………………………………………. 11
2.2.2 Acquisizione immagine …………………………………………….. 13
2.3 Calibrazione ………………………………………………………………… 16
2.3.1 Correzione delle distorsioni ………………………………………… 19 2.3.2 Calibrazione con Smart BTS ……………………………………….. 20
2.4 Cinematica articolare ………………………………………………………... 21
2.4.1 Sistemi di riferimento anatomici ……………………………………. 21
2.4.2 Angoli di Eulero e Cardano …………………………………………. 24
2.5 Errori nei sistemi optoelettronici ……………………………………………. 25
2.5.1 Artefatti strumentali ………………………………………………… 25
2.5.2 Artefatti sperimentali ……………………………………………….. 26
2.6 Protocolli per l’analisi del movimento ……………………………………… 26
2.6.1 Protocollo CAST …………………………………………………… 27
2.6.2 La calibrazione multipla ……………………………………………. 30
Capitolo 3. BIOMECCANICA DELL’ARTO SUPERIORE ………………. 33
3.1 Definizione piani e assi anatomici ………………………………………….. 33
3.2 Struttura ossea dell’arto superiore …………………………………………… 35
3.3. Articolazioni dell’arto superiore e movimenti ……………………………… 37
3.3.1 Articolazione sternoclaveare ………………………………………... 37
3.3.2 Articolazione glenomerale ……………………………………........ 39
3.3.3 Articolazione del gomito …………………………………………… 41
3.4 Protocolli per l’analisi del movimento dell’arto superiore ………………… 43
Capitolo 4. MATERIALI E METODI ……………………………………….. 47
4.1 Introduzione ………………………………………………………………… 47
4.2 Protocollo di acquisizione…………………………………………………… 48
4.2.1 Set-up di acquisizione ……………………………………………… 48
4.2.2 Definizione dei sistemi di riferimento anatomici e degli angoli …… 51
4.3 Calibrazione anatomica ……………………………………………………… 53
4.3.1 Posizionamento cluster e calibrazione dei punti …………………… 53
4.3.2 Doppia calibrazione ………………………………………………… 54
Capitolo 5. RISULTATI ……………………………..………………………... 59
5.1 Introduzione ……………………………………………………………….... 59
5.2 Valutazione sperimentale della cinematica …………………………………. 59
5.2.1 Traiettorie dei punti calibrati (MOV1) …………..…………………. 60
5.2.2 Angoli articolari (MOV1) ………………………………................. 63
5.2.3 Traiettorie dei punti calibrati (MOV2) …………..…………………. 66
5.2.4 Angoli articolari (MOV2) ………………………………................. 69
DISCUSSIONE FINALE ……...…………..…………………………………... 73

BIBLIOGRAFIA ……………………………………...………………………. 75
RINGRAZIAMENTI ………………………………………………………… 77


1
Introduzione
Nel corso degli ultimi anni, nel settore della riabilitazione si sta avendo una considerevole
crescita per quanto riguarda l’uso di sistemi avanzati e di innovazioni tecnologiche.
La combinazione di tecniche innovative e strumenti all'avanguardia hanno permesso di
arricchire ed integrare i tradizionali metodi di valutazione del movimento e, in molti casi,
hanno fornito informazioni ed indici di grande utilità nella scelta dei percorsi terapeutici
da seguire. Lo studio della alterazione posturale e motoria costituisce un settore
biomedico in forte espansione e di grande interesse dal punto di vista clinico, in quanto la
postura ed il movimento sono il risultato dell’interazione di tre principali sistemi
fisiologici: il sistema nervoso, il sistema muscolo-scheletrico ed il sistema sensoriale.
L'analisi fatta su pazienti con problemi motori può dare informazioni molto importanti
per la diagnosi di una particolare patologia a carico di uno dei sistemi coinvolti e del suo
evolversi nel tempo.
Il presente lavoro di tesi è stato svolto presso il centro R&D di BTS spa di Padova. Il
progetto si inserisce nell’ambito dell’analisi cinematica del arto superiore attraverso
l’implementazione tramite Smart Analyzer di modelli già esistenti per la comprensione
dei meccanismi che stanno alla base del movimento. Questa analisi è stata effettuata
tramite stereofotogrammetria optoelettronica che consente la ricostruzione cinematica dei
segmenti corporei attraverso la rilevazione di opportuni markers da telecamere ad
infrarossi.
Nelle pagine a seguire verrà fatta una breve descrizione dell’azienda BTS e delle attività
che vengono svolte al suo interno; verrà poi fatta una piccola parentesi sulla terminologia
usata nell’analisi del movimento e sull’anatomia dell’arto superiore, oggetto preso in
esame in questo studio, per poi passare ad una descrizione generale di cosa si intende per
analisi del movimento e come si svolge. Nella seconda parte della tesi si entra nello
specifico del lavoro effettuato, ovvero l’implementazione di un protocollo per l’analisi
cinematica dell’arto superiore, descrivendone le caratteristiche e le metodologie utilizzate
per la sua elaborazione, tramite il software Smart Analyzer. Il protocollo è stato
sviluppato utilizzando l’approccio CAST per ridurre gli artefatti da tessuto molle (ATM),
sfruttando opportuni cluster formati da quattro marcatori disposti sulla cute in maniera
solidale ai segmenti ossei sottostanti, di cui vogliamo conoscere la cinematica. Per
migliorare ulteriormente i risultati ottenuti, riducendo quindi gli errori, si è sfruttata la

Sviluppo di un tool con Smart Analyzer per l’applicazione della calibrazione multipla alla stima della cinematica dell’arto superiore
2
tecnica della calibrazione multipla; dapprima utilizzando il tempo come funzione peso e
successivamente gli angoli di spalla e gomito. Alla fine di questo studio, si sono discussi i
risultati, verificando la bontà di ricostruzione del modello e confrontando i diversi
approcci di calibrazione utilizzati.

Capitolo 1
L’Azienda BTS
1.1 Presentazione
BTS Spa viene fondata nel 1986 in seguito ad uno Spin-off del Centro di Bioingegneria
della Fondazione Don Gnocchi e del Politecnico di Milano. Scopo della start-up era lo
sfruttamento industriale delle innovative metodologie per l’analisi del movimento
sviluppate dai ricercatori del Centro di Bioingegneria. Nel 2000 nasce a Padova, come
Spin-off dell'Università di Padova e con l'aiuto di un paio imprenditori locali, un’azienda
chiamata eMotion; anch’essa si occupa di innovazioni tecnologiche per l’analisi del
movimento. Nel 1999 la BTS viene acquistata da TC Sistema Spa e nel 2000 TC Sistema
acquista pure eMotion. Nel 2004, attraverso un’operazione di MBO la società BTS è stata
acquistata da dodici dipendenti con la partecipazione di tre imprenditori esterni ed
incorpora, nel 2005, la padovana eMotion che, nella sede di Padova, costituisce il gruppo
di ricerca e sviluppo dell’azienda. Da oltre vent’anni porta innovazione e competenza in
tutto il mondo per mettere nelle mani di ricercatori e medici strumenti e valutazioni che
non esistevano prima. Importanti squadre sportive come AC Milan e Real Madrid si
avvalgono dei suoi sistemi non solo per migliorare le prestazioni dei loro atleti, ma
evitare infortuni e permettere di recuperare più velocemente quando questi accadono.
Oggi oltre 1000 centri nel mondo utilizzano le sue tecnologie per fornire cure più efficaci
ai loro pazienti.
Figura 1.1 Logo azienda BTS (www.btsbioengineering.com)

Sviluppo di un tool con Smart Analyzer per l’applicazione della calibrazione multipla alla stima della cinematica dell’arto superiore
4
1.2 Attività e prodotti
BTS produce strumentazioni scientifiche innovative per l’analisi del movimento. I suoi
sistemi supportano il lavoro di medici, ingegneri e ricercatori che hanno la necessità di
ottenere informazioni oggettive ed accurate, utili per i loro scopi. Le soluzioni BTS si
suddividono a seconda del loro ambito di applicazione in:
• Sistemi per l’analisi cinematica del movimento e per la valutazione funzionale
delle problematiche posturali (BTS G-WALK, BTS POSEIDON, BTS G-
SPORT, BTS SMART-DX)
• Sistemi per l’acquisizione e l’elaborazione di segnali elettromiografici (BTS
FREEEMG, BTS TMJOINT);
• Sistemi terapeutici per la riabilitazione attraverso il coinvolgimento sensoriale
(BTS NIRVANA);
• Sistemi optoelettronici per la misura e la ventilazione polmonare (BTS OEP
System)
• Sistemi per l’analisi delle forze (BTS P-WALK, BTS P-6000);
• Ausili per la riabilitazione (BTS ANYMOV, REOGO).
1.3 Aree di interesse in cui opera BTS
1.3.1 BTS nella Medicina
Ospedali e Case di Cura, Centri Riabilitativi e Cliniche specializzate, utilizzano i sistemi
di analisi del movimento BTS per valutare le disfunzioni del movimento e stabilire le
migliori cure. Il personale medico ottiene in modo rapido, accurato e non invasivo una
dettagliata analisi quantitativa dei parametri biomeccanici e neuromuscolari del paziente.
Ogni anno, decine di migliaia di pazienti di tutto il mondo vengono assistiti nel loro
percorso clinico dai nostri sistemi. L’analisi del cammino (o gait analysis) è
l’applicazione più conosciuta, ma anche la valutazione dell’equilibrio posturale, le
capacità di movimento dell’arto superiore e di altri distretti corporei sono esami entrati
nella routine clinica quotidiana. BTS offre soluzioni complete per l’intero processo
riabilitativo, che comprendono sia i sistemi per la valutazione funzionale che per
Capitolo 1: L’azienda BTS
5
le terapie: robot per la riabilitazione del paziente allettato, sistemi di realtà virtuale che
stimolano la partecipazione attiva del paziente, misurandone costantemente i progressi.
1.3.2 BTS nello Sport
I sistemi BTS sono impiegati da professionisti del mondo dello sport per migliorare le
prestazioni degli atleti di qualsiasi livello. Sistemi wireless, piattaforme di forza e sistemi
optoelettronici, tra loro sincronizzati, forniscono un’analisi multifattoriale accurata di
qualsiasi gesto atletico. Grazie all’uso di queste tecnologie è possibile:
- definire nuove tecniche di allenamento
- ridurre drasticamente le probabilità di infortuni
- identificare il miglior percorso riabilitativo a seguito d’infortunio
- verificare il raggiungimento del pieno recupero dell’atleta.
1.3.3 BTS nella Ricerca
I più prestigiosi istituti scientifici e universitari utilizzano i sistemi BTS per compiere
ricerche nei campi della Biomeccanica, Biometria, Diagnostica e Scienze Motorie.
La tecnologia BTS è stata impiegata nei più importanti programmi spaziali con
installazioni sulle stazioni Spacelab e MIR ed oggi impiegati da NASA, ESA, CNRS nei
programmi di volo parabolico. Negli anni sono state condotte ricerche sull’uomo, al fine
di ottenere protocolli clinici diventati patrimonio della divisione medicale dell’azienda,
ricerche su animali nell’ambito delle neuroscienze, e ricerche industriali nell’ambito
dell’ergonomia e dell’interazione macchine-uomo.
1.4 Il sistema SMART
SMART è il sistema di analisi del movimento progettato da BTS con il quale ho potuto
interagire nel corso del mio periodo in azienda per implementare il protocollo per l’analisi
cinematica dell’arto superiore. Tale sistema si compone da una serie di telecamere digitali
di nuova concezione che utilizzano sensori a elevata sensibilità e illuminatori dal design
innovativo e funzionale, la cui alta potenza di irraggiamento, combinata all’alta
risoluzione della telecamera (fino a 4 Megapixel), aumenta il volume di lavoro e consente
la cattura di movimenti rapidi e impercettibili. Il sistema optoelettronico BTS SMART
DX, si completa con una data station per l’integrazione,la sincronizzazione e la gestione

Sviluppo di un tool con Smart Analyzer per l’applicazione della calibrazione multipla alla stima della cinematica dell’arto superiore
6
di tutte le informazioni cinematiche, cinetiche, elettromiografiche e video provenienti da
dispositivi collegati (pedane di forza, elettromiografi, telecamere 2D). Per ottenere i dati
cinematici il sistema optoelettronico è supportato da appositi software forniti da BTS
stesso. I programmi sono essenzialmente tre:
- Smart Capture
- Smart Tracker
- Smart Analyzer
1.4.1 Smart Capture
E’ la parte software che permette l’acquisizione delle immagini per poi poterle analizzare;
nel caso di più apparecchiature collegate al sistema, ne permette la loro sincronizzazione.
Una volta avviato il programma, effettua una verifica delle telecamere collegate al
calcolatore e permette di vedere il campo di acquisizione di ognuna. E’ quindi possibile
migliorare la loro disposizione a seconda dell’acquisizione che si deve svolgere per poi
passare alla calibrazione del sistema. Come si vedrà nei prossimi paragrafi, si fa uso di
una terna destrorsa di dimensione nota posta nel mezzo dell’area di acquisizione per
definire il sistema di riferimento globale del laboratorio e di una bacchetta per definire il
volume di acquisizione.
Figura 1.2 Immagine di un’ acquisizione con telecamere a infrarossi . I punti bianchi rappresentano i
markers applicati sul corpo del soggetto
Capitolo 1: L’azienda BTS
7
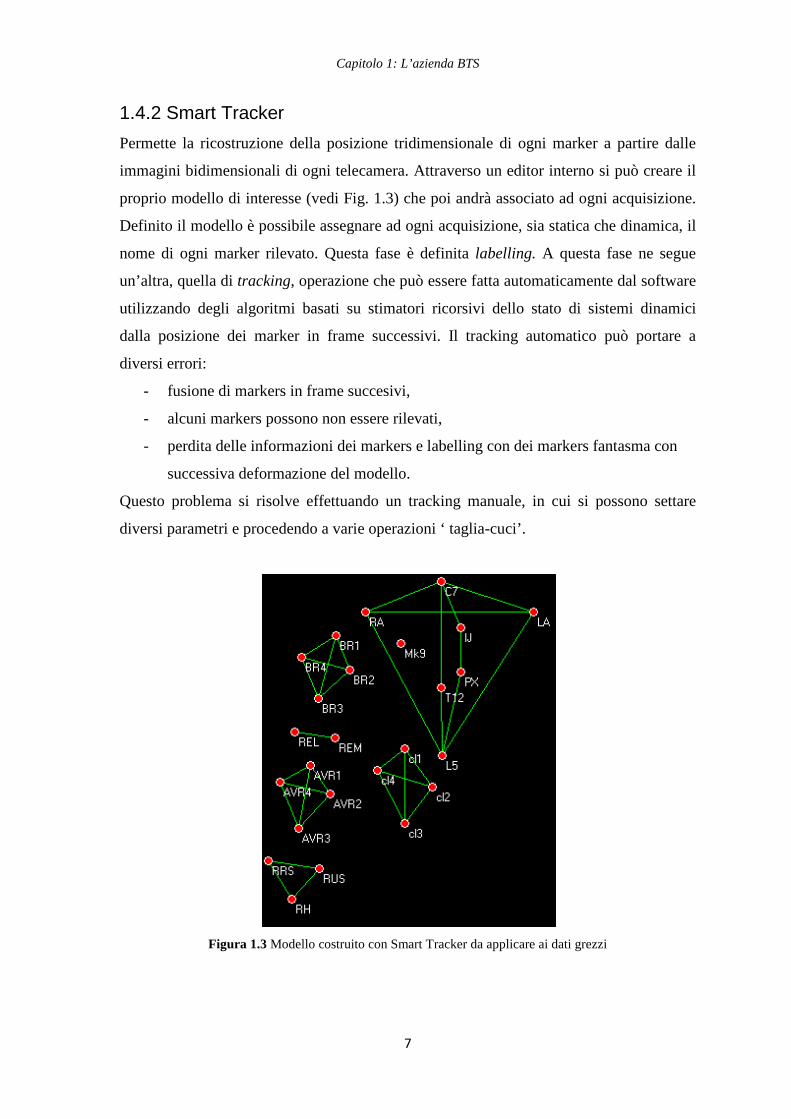
1.4.2 Smart Tracker
Permette la ricostruzione della posizione tridimensionale di ogni marker a partire dalle
immagini bidimensionali di ogni telecamera. Attraverso un editor interno si può creare il
proprio modello di interesse (vedi Fig. 1.3) che poi andrà associato ad ogni acquisizione.
Definito il modello è possibile assegnare ad ogni acquisizione, sia statica che dinamica, il
nome di ogni marker rilevato. Questa fase è definita labelling. A questa fase ne segue
un’altra, quella di tracking, operazione che può essere fatta automaticamente dal software
utilizzando degli algoritmi basati su stimatori ricorsivi dello stato di sistemi dinamici
dalla posizione dei marker in frame successivi. Il tracking automatico può portare a
diversi errori:
- fusione di markers in frame succesivi,
- alcuni markers possono non essere rilevati,
- perdita delle informazioni dei markers e labelling con dei markers fantasma con
successiva deformazione del modello.
Questo problema si risolve effettuando un tracking manuale, in cui si possono settare
diversi parametri e procedendo a varie operazioni ‘ taglia-cuci’.
Figura 1.3 Modello costruito con Smart Tracker da applicare ai dati grezzi

Sviluppo di un tool con Smart Analyzer per l’applicazione della calibrazione multipla alla stima della cinematica dell’arto superiore
8
1.4.3 Smart Analyzer
E’ un sofware completo per l’analisi biomeccanica del movimento che permette di
costruire uno schema di calcolo che genera tutti i dati necessari all’utente per una
completa analisi del gesto motorio. Con una semplice interfaccia grafica a blocchi e
semplici operazioni drag&drop è possibile generare tutti i dati biomeccanici di interesse
come distanze, angoli velocità, accelerazioni,forze, momenti … I dati possono essere
rappresentati per mezzo di visualizzatori tridimensionali, di grafici e di tabelle numeriche.
Il software offre anche la possibilità di generare sistemi di riferimento anatomici diversi
da quello del laboratorio, che permettono all’utente di analizzare e presentare i dati in
diversi sistemi di coordinate.
Figura 1.4 Screenshot di una schermata dello Smart Analyzer
Nel presente lavoro di tesi Smart Analyzer ha svolto il ruolo fondamentale di costruzione
del protocollo per l’analisi cinematica dell’arto superiore.

Capitolo 2
Analisi del movimento 2.1 Introduzione
In passato la deambulazione o qualsiasi altro gesto motorio venivano registrati da un
sistema a telecamere fornendo una misura qualitativa della locomozione del soggetto
analizzato, che veniva interpretata in modo molto soggettivo dal clinico.
Il continuo evolversi delle tecniche per l’analisi del movimento hanno portato alla
formazione di veri e propri laboratori che consentono di affiancare alle valutazioni
qualitative bidimensionali, delle valutazioni quantitative tridimensionali relative sia alla
cinematica che alla dinamica del movimento e all'attivazione muscolare.
Si possono quindi misurare diversi tipi di dati:
• dati cinematici: cioè i movimenti del corpo;
• dati dinamici: cioè le forze e i momenti angolari;
• altri tipi di segnali misurati per mezzo di elettrodi (EMG, ECG …).
Nell’analisi del cammino, per esempio, le variabili dinamiche sono ricavate integrando la
cinematica con le misure ottenute da piattaforme di forza; oltre a queste variabili possono
essere acquisiti dei segnali elettromiografici (EMG), elettrocardiografici (ECG), di
pressione arteriosa e quant’altro possa essere associato all’atto motorio.
A grandi linee quindi un laboratorio di analisi del movimento sarà costituito da un sistema
di rilevazione della cinematica, delle piattaforme di forza e da una serie di
apparecchiature per la rilevazione di altri segnali di interesse (vedi Fig. 2.1).
Per la misura delle grandezze cinematiche esistono diverse tipologie di strumentazione
che si differenziano anche per il loro grado di invasività. Gli elettrogoniometri e gli
accelerometri consentono di ottenere misure dirette ma presentano lo svantaggio di dover
mantenere il contatto tra la superficie del corpo e i dispositivi elettrici. Inoltre sono
ingombranti e possono disturbare il paziente durante il gesto motorio in esame. I sistemi
basati su sensori elettromagnetici forniscono per ogni segmento anatomico posizione e
orientamento attraverso tre rotazioni e un vettore traslazione. L’elevata sensibilità a
interferenze di oggetti ferromagnetici presenti nell’area circostante rendono però tali
sistemi poco affidabili. I sistemi optoelettronici che utilizzano telecamere operanti nella

Sviluppo di un tool con Smart Analyzer per l’applicazione della calibrazione multipla alla stima della
gamma dell’infrarosso rappresentano la soluzione più utilizzata per l’analisi del
movimento. Essi garantiscono una buona accuratezza anche se forniscono una stima e
non una misura delle variabili c
localizzate sulla superficie corporea del soggetto e ricostruendo in 3D le immagini
acquisite.
Figura 2.1 Struttura generale di un laboratorio di analisi del movimento
Tali sistemi permettono una dettagliata valutazione dell’efficacia
effettuato sul paziente. Avere la possibilità di monitorare il movimento del paziente
dunque, porta alla possibilità di misurare quantitativamente gli effetti prodotti da u
determinata tecnica farmacologica,
evidenziare l’efficacia dell’uso di particolare ortesi o meglio di valutare quanto una ortesi
sia più adeguata per quello specifico paziente. La semplicità dell’es
invasività permette di effettuare l’acquisizione anche di pazienti poco collaboranti o
caratterizzati da deambulazioni particolari.
I principali aspetti positivi di questa tecnologia possono quindi essere così elencati:
- tridimensionalità (3D);
- non invasività;
- possibilità di fornire informazioni quantitative con elevata precisione;
- possibilità di acquisire contemporaneamente dati relativi alla cinematica, alla dinamica
ed all’attivazione muscolare;
Sviluppo di un tool con Smart Analyzer per l’applicazione della calibrazione multipla alla stima della cinematica dell’arto superiore
10
gamma dell’infrarosso rappresentano la soluzione più utilizzata per l’analisi del
movimento. Essi garantiscono una buona accuratezza anche se forniscono una stima e
ura delle variabili cinematiche, sfruttando delle caratteristiche geometriche
localizzate sulla superficie corporea del soggetto e ricostruendo in 3D le immagini
Struttura generale di un laboratorio di analisi del movimento ( www.btsbioengineering
Tali sistemi permettono una dettagliata valutazione dell’efficacia del trattamento
paziente. Avere la possibilità di monitorare il movimento del paziente
dunque, porta alla possibilità di misurare quantitativamente gli effetti prodotti da u
erminata tecnica farmacologica, chirurgica, riabilitativa e ancora alla possibilità di
evidenziare l’efficacia dell’uso di particolare ortesi o meglio di valutare quanto una ortesi
sia più adeguata per quello specifico paziente. La semplicità dell’esame e l’assoluta non
invasività permette di effettuare l’acquisizione anche di pazienti poco collaboranti o
caratterizzati da deambulazioni particolari.
I principali aspetti positivi di questa tecnologia possono quindi essere così elencati:
possibilità di fornire informazioni quantitative con elevata precisione;
possibilità di acquisire contemporaneamente dati relativi alla cinematica, alla dinamica
Sviluppo di un tool con Smart Analyzer per l’applicazione della calibrazione multipla alla stima della
gamma dell’infrarosso rappresentano la soluzione più utilizzata per l’analisi del
movimento. Essi garantiscono una buona accuratezza anche se forniscono una stima e
inematiche, sfruttando delle caratteristiche geometriche
localizzate sulla superficie corporea del soggetto e ricostruendo in 3D le immagini
btsbioengineering.com)
del trattamento
paziente. Avere la possibilità di monitorare il movimento del paziente
dunque, porta alla possibilità di misurare quantitativamente gli effetti prodotti da una
chirurgica, riabilitativa e ancora alla possibilità di
evidenziare l’efficacia dell’uso di particolare ortesi o meglio di valutare quanto una ortesi
ame e l’assoluta non
invasività permette di effettuare l’acquisizione anche di pazienti poco collaboranti o
I principali aspetti positivi di questa tecnologia possono quindi essere così elencati:
possibilità di acquisire contemporaneamente dati relativi alla cinematica, alla dinamica

Capitolo 2; Analisi del movimento
11
- facile utilizzo;
- definire il livello di limitazione funzionale e di disabilità conseguente alla patologia e il
suo evolversi con la crescita e /o l’invecchiamento dell’individuo;
- valutare e quantificare gli effetti dei diversi trattamenti e monitorare tali effetti nel
tempo;
- contribuire alla pianificazione del trattamento permettendo la stesura di un programma
riabilitativo personalizzato che consente di verificare oggettivamente, con indici di
misurabilità certi, lo stato clinico del paziente prima, durante e alla fine del trattamento.
Nell’ambito del mio tirocinio è stata presa in considerazione solamente la parte
riguardante la cinematica, poiché l’obbiettivo prefissato era quello di implementare un
protocollo per lo studio del movimento dell’arto superiore e in particolare delle
articolazioni che lo caratterizzano.
2.2 Sistemi optoelettronici
2.2.1 Telecamere / Sensori
L’analisi strumentale del moto o meglio, nel nostro caso, l’analisi della cinematica
dell’arto superiore, è stata eseguita attraverso un set di otto telecamere (il sistema ne
richiede almeno due) in grado di ricostruire nel tempo l’andamento di particolari
marcatori (markers, vedi Fig.2.2). I sistemi optoelettronici lavorano nel campo
dell’infrarosso catturando i riflessi generati dai markers, elementi di materiale
catarifrangente che vengono apposti sul corpo del soggetto in particolari punti di repere.
Figura 2.2 Markers
Sviluppo di un tool con Smart Analyzer per l’applicazione della calibrazione multipla alla stima della cinematica dell’arto superiore
12
Le fonti di illuminazione sono generalmente poste attorno agli obbiettivi di ciascuna
telecamera e i riflessi vengono catturati dalle telecamere stesse attraverso dei sensori a
fotodiodi che trasducono il segnale luminoso in segnale elettrico.
Si possono distinguere due tipi di sensori:
CCD (Charge Coupled Device) consiste in un circuito integrato formato da una riga, o da
una griglia, di elementi semiconduttori in grado di accumulare una carica elettrica
proporzionale all'intensità della radiazione elettromagnetica che li colpisce. Questi
elementi sono accoppiati in modo che ognuno di essi, sollecitato da un impulso elettrico,
possa trasferire la propria carica ad un altro elemento adiacente. Inviando al dispositivo
una sequenza temporizzata d'impulsi, si ottiene in uscita un segnale elettrico grazie al
quale è possibile ricostruire la matrice dei pixel che compongono l'immagine proiettata
sulla superficie del CCD stesso. Il segnale arriva all’esterno del chip attraverso un nodo
d’uscita analogico. Tale sistema permette di dedicare tutta l’area del sensore alla cattura
della luce, e in questo caso il filling factor (fattore determinante per la qualità
dell’immagine) è elevato, ma ha bisogno, a monte della videocamera di un convertitore
analogico-digitale.
CMOS (Complementary Metal Oxide) questi dispositivi, invece sono caratterizzati dal
fatto che ogni pixel della matrice è dotato del proprio sistema di conversione da carica a
tensione. Il circuito di digitalizzazione è solitamente integrato e ciò permette di realizzare
sensori di minore dimensione. Tuttavia, queste funzionalità riducono l’area sensibile
totale per la cattura della luce e il filling factor risulta inferiore. Ormai da una decina
d’anni i sensori CMOS sono diventati commercialmente convenienti e con prestazioni
paragonabili ai CCD.
Grazie quindi all’utilizzo combinato di illuminatori e markers riflettenti, è possibile
generare immagini ad alto contrasto dove è facile identificare i markers. Lavorando le
telecamere nell’ambito dell’infrarosso il sistema è assolutamente non invasivo.
Naturalmente oltre alla struttura di acquisizione, un sistema di analisi del movimento
deve essere supportato da dei software di elaborazione per la rilevazione dei marcatori e
la ricostruzione della loro posizione. Solitamente oltre ad un applicativo per la
calibrazione/acquisizione e associato anche un programma per il labelling e il tracking.

Capitolo 2; Analisi del movimento
13
Figura 2.3 Telecamere BTS e markers passivi (www.btsbioengineering.com)
2.2.2 Acquisizione immagine
La formazione dell’immagine avviene attraverso una procedura che si articola in tre
punti:
-rilevazione markers
-stima baricentri dei markers
-calcolo coordinate 3D dei markers
Prima di tutto, per ogni frame di acquisizione, è necessario distinguere i markers dalle
tracce non significative; bisognerà quindi allontanare dal volume di acquisizione tutti
quelli oggetti riflettenti che potrebbero portare disturbo ed errori nelle prove.
Nell’immagine acquisita quindi ogni pixel viene classificato come appartenente allo
sfondo o ad una parte di marker secondo algoritmi di probabilità. Per fare ciò occorre
definire una soglia in base alla quale si classifica un pixel come appartenente allo sfondo
o ad un marker. Tale soglia viene fissata dopo aver filtrato l’immagine ed analizzato le
tonalità di grigio di ogni pixel delle videocamere. Questo metodo è detto sogliatura.
Successivamente si stima il centro del marcatore calcolando il baricentro dei pixel sopra
soglia che ne fanno parte o tramite il circle fitting che si basa sul calcolo di una
circonferenza fittizia passante per i pixel del bordo dell’immagine del marcatore. Un
metodo alternativo per il calcolo del baricentro dei markers è la cross-correlazione che
mappa la forma attesa del marcatore con l’effettiva caratteristica sull’immagine tramite
delle maschere bidimensionali. Specificando la dimensione della maschera e i valori di
Sviluppo di un tool con Smart Analyzer per l’applicazione della calibrazione multipla alla stima della cinematica dell’arto superiore
14
ampiezza di ciascun campione è possibile riconoscere i markers ed eliminare i pixel
isolati ad alta intensità luminosa. Dei markers riconosciuti si calcola la posizione del
baricentro e a questo punto i baricentri saranno espressi nei sistemi di riferimento del
sensore di ciascuna telecamera, da una coppia di coordinate (u,v). I dati disponibili sono
le coordinate 2D delle proiezioni dei marcatori, nei sistemi di riferimento di ogni
videocamera, per ogni frame di acquisizione. Occorre, quindi, stimare la posizione dei
marcatori in termini delle coordinate 3D del sistema di riferimento del laboratorio. Questo
è possibile solo se lo stesso marcatore è stato identificato da almeno 2 videocamere (vedi
Fig. 2.4). La visione stereoscopica è una tecnica nella quale, le coordinate tridimensionali
di un marker riflettente, sono calcolate mediante la misurazione fatta su due o più
immagini provenienti da telecamere, che inquadrano lo stesso marker da due posizioni
differenti.
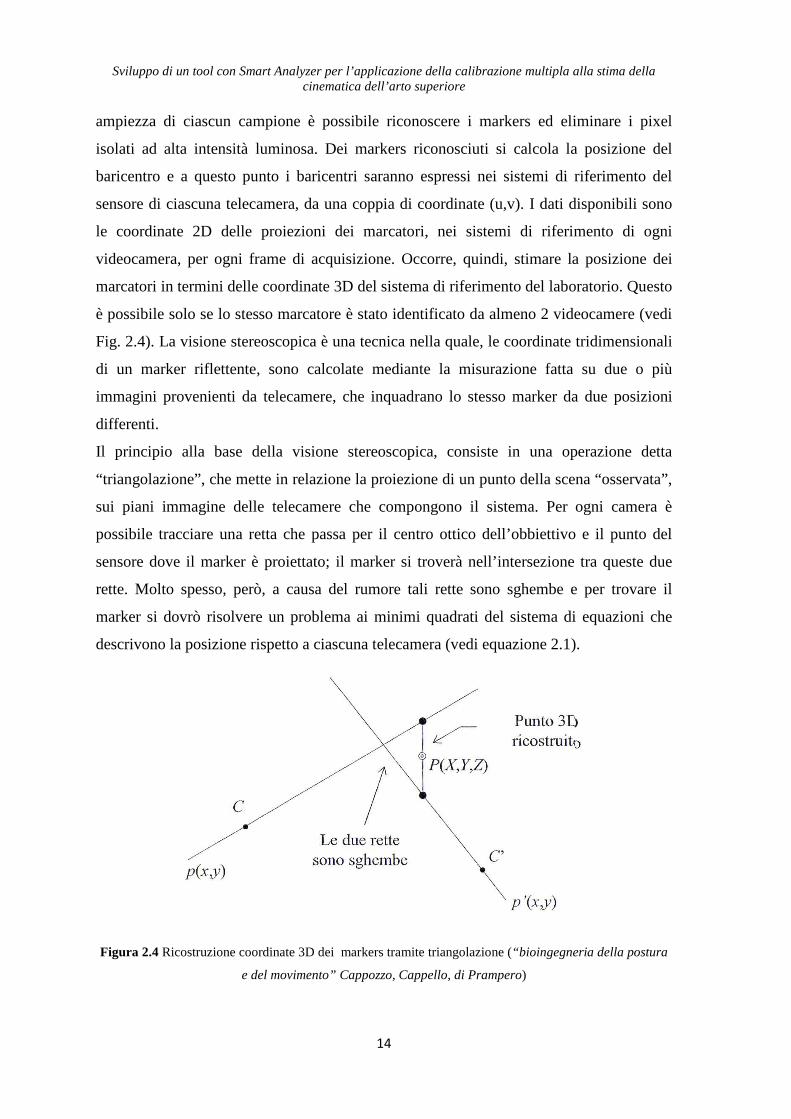
Il principio alla base della visione stereoscopica, consiste in una operazione detta
“triangolazione”, che mette in relazione la proiezione di un punto della scena “osservata”,
sui piani immagine delle telecamere che compongono il sistema. Per ogni camera è
possibile tracciare una retta che passa per il centro ottico dell’obbiettivo e il punto del
sensore dove il marker è proiettato; il marker si troverà nell’intersezione tra queste due
rette. Molto spesso, però, a causa del rumore tali rette sono sghembe e per trovare il
marker si dovrò risolvere un problema ai minimi quadrati del sistema di equazioni che
descrivono la posizione rispetto a ciascuna telecamera (vedi equazione 2.1).
Figura 2.4 Ricostruzione coordinate 3D dei markers tramite triangolazione (“bioingegneria della postura
e del movimento” Cappozzo, Cappello, di Prampero)

Capitolo 2; Analisi del movimento
15
La soluzione di tale problema richiede la conoscenza di opportuni parametri del sistema,
forniti dalla procedura di calibrazione: quelli “intrinseci” che includono la lunghezza
focale e alcune informazioni sulle caratteristiche del sistema lente-sensore (distorsione
delle lenti, forma dei pixels, ecc.) e quelli estrinseci, che rappresentano la posizione e
l’orientamento delle telecamere nelle spazio, rispetto quindi ad un sistema di riferimento
noto.
Note le coordinate tridimensionali dei markers è possibile quindi calcolare traiettorie,
grandezze angolari (e quindi determinare angoli di flesso-estensione, abd-adduzione e
extra-intra rotazione delle principali articolazioni), velocità, accelerazioni e conoscere
quindi in dettaglio la cinematica del movimento del segmento corporeo sul quale sono
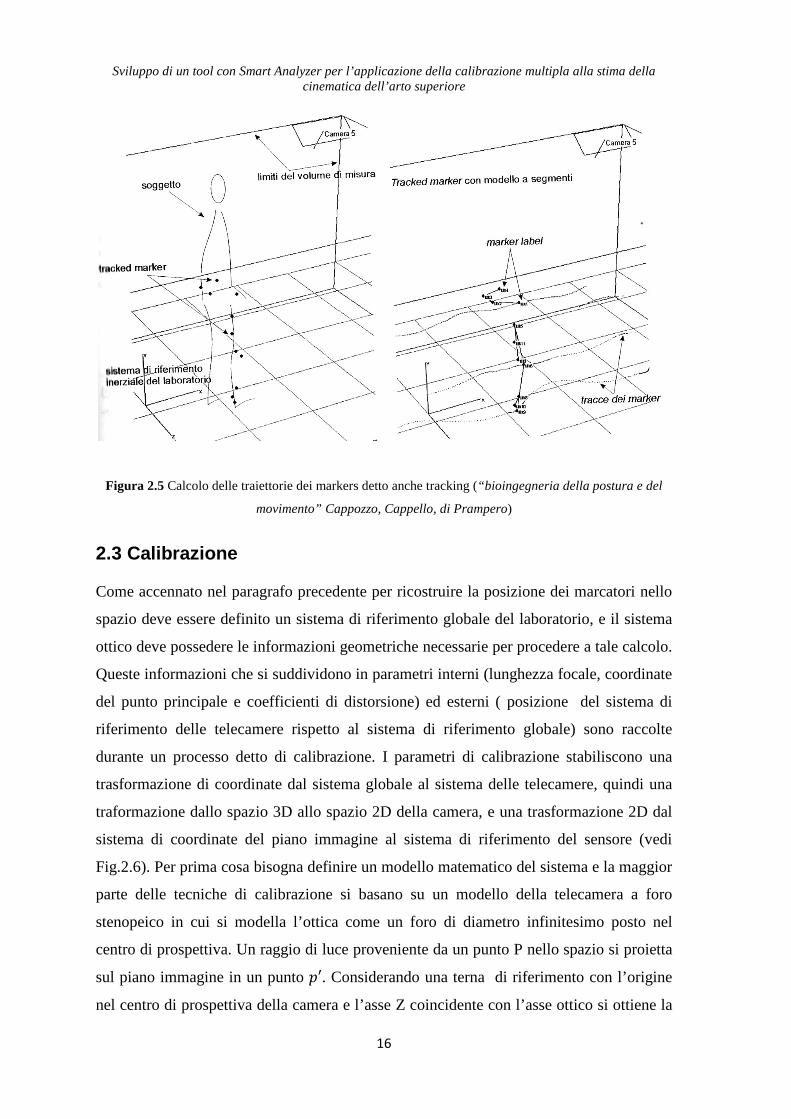
stati posizionati i markers. Uno dei problemi più complessi dell’analisi del movimento è il
calcolo delle traiettorie, detto anche tracking( vedi Fig. 2.5 ). E’ un problema simile alla
corrispondenza fra misure su diversi piani immagine, solo che la corrispondenza e fra due
istanti temporali. Per risolvere questa problema si possono utilizzare due escamotage: la
regolarità della traiettoria e/o informazioni a priori sul tipo di gesto motorio che il
soggetto compie. Nel primo caso si fa ricorso a degli stimatori ricorsivi dello stato come il
filtro di Kalman. La posizione attesa del marker, viene calcolata da un algoritmo sulla
base della posizione precedente e della varianza della predizione. Nel secondo caso
l’informazione a priori può essere di diversi tipi e risulta difficile creare algoritmi
adeguati per applicazioni diverse. In alcune immagini i markers possono essere disposti
su segmenti rigidi quindi le distanze fra i marcatori e gli angoli sono invarianti del moto;
nel caso di corpi articolati come può essere il corpo umano il problema risulta più difficile
da risolvere. Si utilizza quindi un concetto statistico di forma tramite la densità di
probabilità congiunta della posizione relativa dei marcatori e della loro velocità. Per
utilizzare tale descrizione di forma si sfrutta il fatto che il corpo umano è una catena
cinematica con una certa indipendenza nel moto.
Sviluppo di un tool con Smart Analyzer per l’applicazione della calibrazione multipla alla stima della cinematica dell’arto superiore
16
Figura 2.5 Calcolo delle traiettorie dei markers detto anche tracking (“bioingegneria della postura e del
movimento” Cappozzo, Cappello, di Prampero)
2.3 Calibrazione Come accennato nel paragrafo precedente per ricostruire la posizione dei marcatori nello
spazio deve essere definito un sistema di riferimento globale del laboratorio, e il sistema
ottico deve possedere le informazioni geometriche necessarie per procedere a tale calcolo.
Queste informazioni che si suddividono in parametri interni (lunghezza focale, coordinate
del punto principale e coefficienti di distorsione) ed esterni ( posizione del sistema di
riferimento delle telecamere rispetto al sistema di riferimento globale) sono raccolte
durante un processo detto di calibrazione. I parametri di calibrazione stabiliscono una
trasformazione di coordinate dal sistema globale al sistema delle telecamere, quindi una
traformazione dallo spazio 3D allo spazio 2D della camera, e una trasformazione 2D dal
sistema di coordinate del piano immagine al sistema di riferimento del sensore (vedi
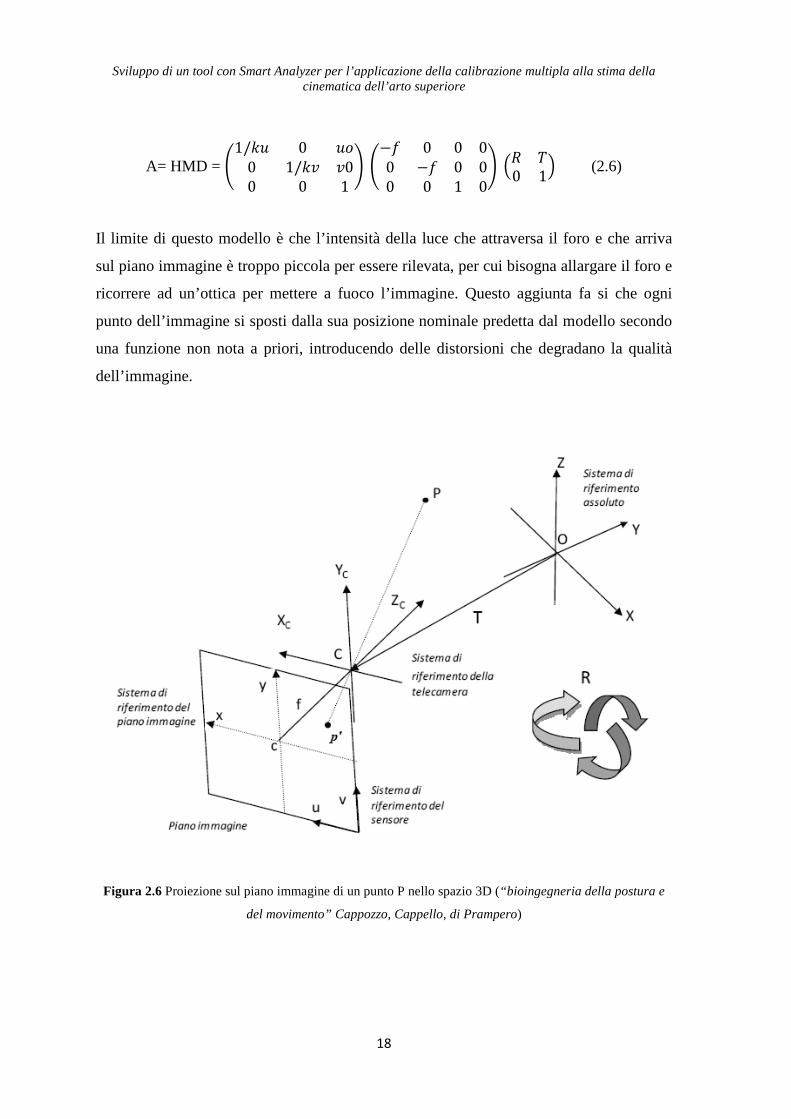
Fig.2.6). Per prima cosa bisogna definire un modello matematico del sistema e la maggior
parte delle tecniche di calibrazione si basano su un modello della telecamera a foro
stenopeico in cui si modella l’ottica come un foro di diametro infinitesimo posto nel
centro di prospettiva. Un raggio di luce proveniente da un punto P nello spazio si proietta
sul piano immagine in un punto �′. Considerando una terna di riferimento con l’origine
nel centro di prospettiva della camera e l’asse Z coincidente con l’asse ottico si ottiene la

Capitolo 2; Analisi del movimento
17
seguente relazione tra le coordinate xp,yp del sistema di riferimento del piano immagine e
le coordinate Xp,Yp,Zp del sitema di riferimento della camera dei punti �′ e P.
������ = − �1/�� 00 1/��������� (2.2)
dove è la lunghezza focale, ovvero la distanza del centro di prospettiva della camera dal
piano immagine. La formula 2.2 ricorrendo all’uso delle coordinate omogenee può essere
riscritta come:
� �����1 � = �− 0 00 − 00 0 1
000��������1 � = ��p (2.3)
Il sensore della telecamera ha un proprio sistema di riferimento posto sull’angolo
inferiore destro del piano immagine. Date le dimensioni orizzontale e verticale (ku, kv) e
le coordinate del punto principale (u0,v0), le coordinate (u,v) del punto p nel sistema di
riferimento del sensore sono:
� = ���1� = �1/�� 0 u00 1/�� �00 0 1 � �
����1 � = �′ (2.4)
Infine si può definire il punto P, generalmente espresso rispetto al riferimento globale, nel
sistema di riferimento della telecamera :
Pp =�������1 � = �! "0 1��
�#�#�#1 � = $� (2.5)
dove T e R rappresentano rispettivamente il vettore traslazione e l’orientamento del
sistema di riferimento della camera rispetto al sistema di riferimento globale e Pp è il
punto P espresso nel sistema di riferimento della telecamera. Il modello finale può quindi
considerarsi come una matrice A di dimensioni 3X4 ottenuta attraverso le tre precedenti
trasformazioni:
Sviluppo di un tool con Smart Analyzer per l’applicazione della calibrazione multipla alla stima della
A= HMD = �1/��0 10
Il limit e di questo modello è che l’intensità della luce che attraversa il foro e che arriva
sul piano immagine è troppo piccola per essere rilevata, per cui bisogna allargare il foro e
ricorrere ad un’ottica per mettere a fuoco l’immagine. Questo aggiunta fa si c
punto dell’immagine si sposti dalla sua posizione nominale predetta dal modello secondo
una funzione non nota a priori, introducendo delle distorsioni che degradano la qualità
dell’immagine.
Figura 2.6 Proiezione sul piano immagine di un punto
del movimento” Cappozzo, Cappello, di Prampero
Sviluppo di un tool con Smart Analyzer per l’applicazione della calibrazione multipla alla stima della cinematica dell’arto superiore
18
0 �%1/�� �00 1 �� 0 0 00 0 00 0 1 0��! "0 1�
e di questo modello è che l’intensità della luce che attraversa il foro e che arriva
immagine è troppo piccola per essere rilevata, per cui bisogna allargare il foro e
ricorrere ad un’ottica per mettere a fuoco l’immagine. Questo aggiunta fa si c
punto dell’immagine si sposti dalla sua posizione nominale predetta dal modello secondo
una funzione non nota a priori, introducendo delle distorsioni che degradano la qualità
Proiezione sul piano immagine di un punto P nello spazio 3D (“bioingegneria della postura e
del movimento” Cappozzo, Cappello, di Prampero)
Sviluppo di un tool con Smart Analyzer per l’applicazione della calibrazione multipla alla stima della
� (2.6)
e di questo modello è che l’intensità della luce che attraversa il foro e che arriva
immagine è troppo piccola per essere rilevata, per cui bisogna allargare il foro e
ricorrere ad un’ottica per mettere a fuoco l’immagine. Questo aggiunta fa si che ogni
punto dell’immagine si sposti dalla sua posizione nominale predetta dal modello secondo
una funzione non nota a priori, introducendo delle distorsioni che degradano la qualità
“bioingegneria della postura e

Capitolo 2; Analisi del movimento
19
2.3.1 Correzione delle distorsioni
Per la stima delle distorsioni geometriche appena accennate, si possono utilizzare diversi
approcci:
- stima a priori dei parametri di distorsione , indipendentemente da parametri esterni di
calibrazione, utilizzando un oggetto di geometria nota;
- calcolo delle distorsioni durante la calibrazione del sistema parallelamente ai parametri
esterni.
Nel primo caso è necessario definire un operatore di trasformazione G tale che
mc = Gmd (2.7)
dove mc sono le coordinate dei punti 2D corretti e md quelle dei punti distorti. Tale tipo di
approccio chiamato modello diretto, dato un punto di coordinate distorte, fornisce la stima
del corrispondente punto corretto, calcolando il baricentro della regione di pixel distorta
per poi correggerlo utilizzando la funzione G. Per definire G, a prescindere dal numero di
parametri utilizzati è necessario avere un numero minimo di coppie distorte (xd, yd) e
nominalei (xn, yn). In caso di forti distorsioni, quindi soprattutto ai margini delle
immagini, presenta diversi limiti. Un approccio migliore è quello globale che utilizza un
polinomio di questo tipo:
G(p,md) = �#&' + #)'�* + #+'�* + #,'�*�* + #-'�*+ + #.'�*+ +⋯#&0 + #)0�* + #+0�* + #,0�*�* + #-0�*+ + #.0�*+ +⋯� (2.8)
dove il vettore p contiene i due insiemi di parametri #'e #0.
Il secondo metodo di stima dei parametri di distorsioni, prevede che essi vengano
determinati insieme ai parametri geometrici delle telecamere durante la fase di
calibrazione 3D.
La calibrazione di un sistema si riconduce, quindi, alla stima di alcuni parametri
geometrici delle telecamere. Essa avviene utilizzando dei punti di controllo, distribuiti nel
volume di calibrazione. Alcuni metodi assumono che le coordinate di questi punti di
controllo siano note (per esempio la DLT basata sulla soluzione di un sistema lineare
Abdel-Aziz e Karara 1971), altri stimano le coordinate iterativamente a partire da un
valore approssimato (metodo “bundle adjustment Gruen e Beyer 1992).
Sviluppo di un tool con Smart Analyzer per l’applicazione della calibrazione multipla alla stima della cinematica dell’arto superiore
20
2.3.2 Calibrazione con Smart BTS
In generale, operativamente parlando, la calibrazione del sistema tramite l’applicativo
Smart BTS si articola di due step:
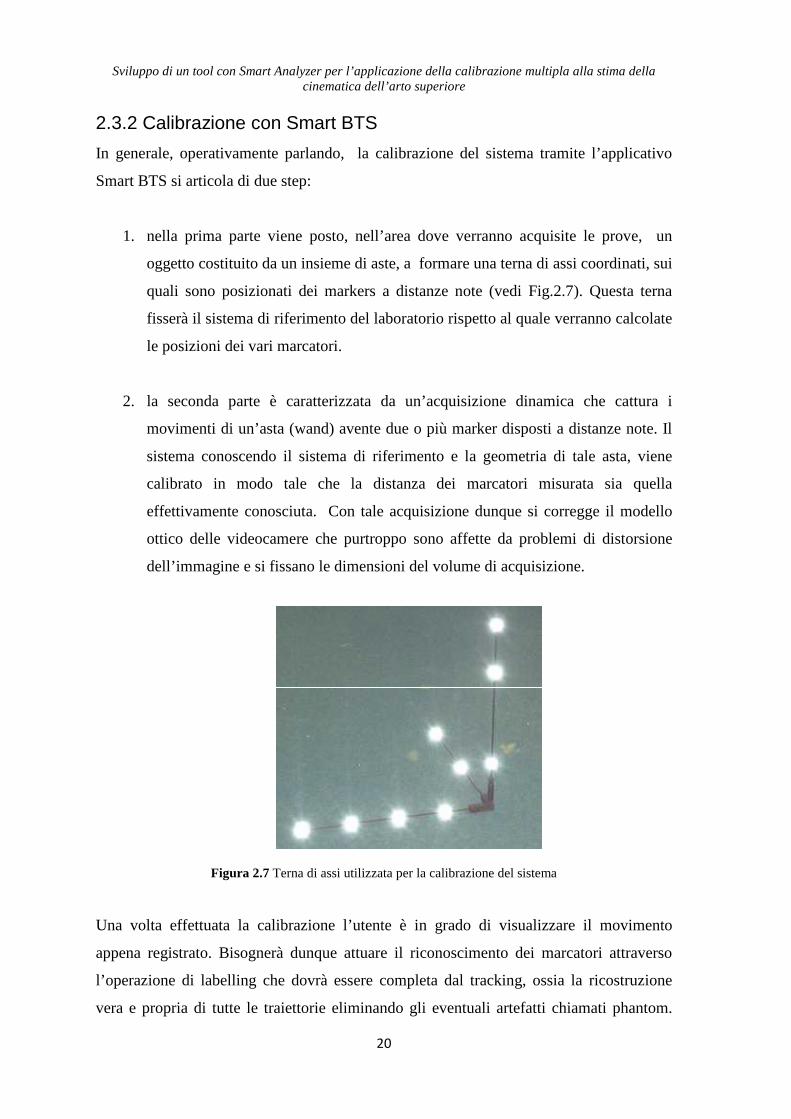
1. nella prima parte viene posto, nell’area dove verranno acquisite le prove, un
oggetto costituito da un insieme di aste, a formare una terna di assi coordinati, sui
quali sono posizionati dei markers a distanze note (vedi Fig.2.7). Questa terna
fisserà il sistema di riferimento del laboratorio rispetto al quale verranno calcolate
le posizioni dei vari marcatori.
2. la seconda parte è caratterizzata da un’acquisizione dinamica che cattura i
movimenti di un’asta (wand) avente due o più marker disposti a distanze note. Il
sistema conoscendo il sistema di riferimento e la geometria di tale asta, viene
calibrato in modo tale che la distanza dei marcatori misurata sia quella
effettivamente conosciuta. Con tale acquisizione dunque si corregge il modello
ottico delle videocamere che purtroppo sono affette da problemi di distorsione
dell’immagine e si fissano le dimensioni del volume di acquisizione.
Figura 2.7 Terna di assi utilizzata per la calibrazione del sistema
Una volta effettuata la calibrazione l’utente è in grado di visualizzare il movimento
appena registrato. Bisognerà dunque attuare il riconoscimento dei marcatori attraverso
l’operazione di labelling che dovrà essere completa dal tracking, ossia la ricostruzione
vera e propria di tutte le traiettorie eliminando gli eventuali artefatti chiamati phantom.

Capitolo 2; Analisi del movimento
21
Questi difetti possono essere provocati dalla sovrapposizione di tracce distinte o dal
passaggio dei markers di fronte agli illuminatori che causano uno sfarfallio del segnale.
2.4 Cinematica articolare
Il corpo umano viene generalmente descritto come una catena cinematica di segmenti
ossei. Il principio che sta alla base dello studio della cinematica è l’assunzione che tali
segmenti siano rigidi; naturalmente questa è una semplificazione della realtà in quanto
vengono completamente ignorati i tessuti molli circostanti e le deformazioni dell’osso
stesso. Per la descrizione dell’orientamento di un segmento osseo e della sua posizione è
necessaria l’implementazione di un protocollo.
Il protocollo è un procedimento che descrive primariamente il modello biomeccanico che
meglio rappresenta la cinematica dei segmenti rigidi in gioco, le modalità attraverso le
quali avviene l'acquisizione, gli algoritmi per ottenere dati riferibili all’anatomia del
movimento piuttosto che ai dispositivi utilizzati per le acquisizioni, ed eventualmente
l'ordine delle prove di acquisizione.
Questo, ed altri problemi, come possono essere quelli di affidabilità di modello, vengono
trattati e, in parte, risolti, con lo sviluppo e l'implementazione di protocolli sperimentali.
2.4.1 Sistemi di riferimento anatomici
Una volta ottenute le coordinate 3D di tutti i markers e le loro traiettorie rispetto al
sistema di riferimento globale del laboratorio, il prossimo passo sarà quello di
determinare la posizione e orientazione dei segmenti ossei su cui essi sono posizionati.
Per descrivere la posizione del segmento si deve definire un sistema di riferimento locale
( o anatomico) solidale con il segmento stesso. Tale sistema approssima i tre piani
anatomici del movimento umano. Anche gli assi associati sono, naturalmente,
un’approssimazione degli assi reali di rotazione delle articolazione che il segmento forma.
La cinematica del segmento rispetto al sistema globale (sistema di riferimento del
laboratorio definito e utilizzato in fase di calibrazione) è completamente descritta tramite
un vettore posizione e una matrice di rotazione.
Sviluppo di un tool con Smart Analyzer per l’applicazione della calibrazione multipla alla stima della cinematica dell’arto superiore
22
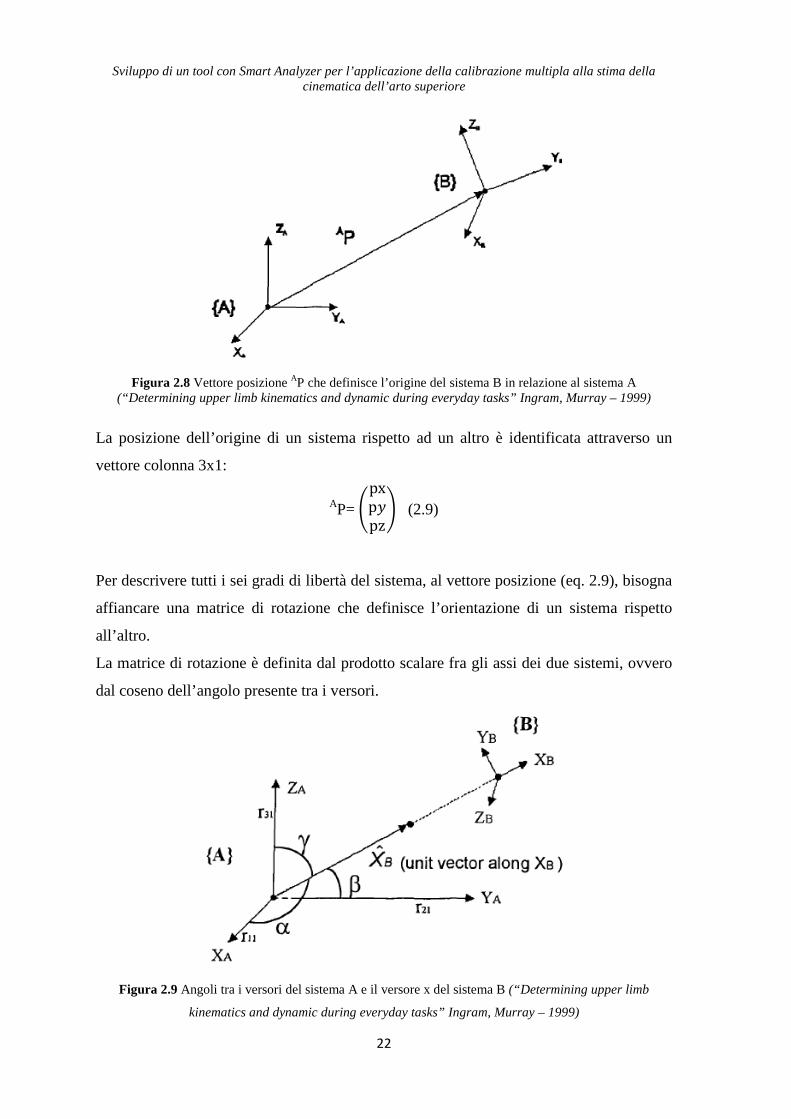
Figura 2.8 Vettore posizione AP che definisce l’origine del sistema B in relazione al sistema A
(“Determining upper limb kinematics and dynamic during everyday tasks” Ingram, Murray – 1999)
La posizione dell’origine di un sistema rispetto ad un altro è identificata attraverso un
vettore colonna 3x1:
AP=�pxp�pz� (2.9)
Per descrivere tutti i sei gradi di libertà del sistema, al vettore posizione (eq. 2.9), bisogna
affiancare una matrice di rotazione che definisce l’orientazione di un sistema rispetto
all’altro.
La matrice di rotazione è definita dal prodotto scalare fra gli assi dei due sistemi, ovvero
dal coseno dell’angolo presente tra i versori.
Figura 2.9 Angoli tra i versori del sistema A e il versore x del sistema B (“Determining upper limb
kinematics and dynamic during everyday tasks” Ingram, Murray – 1999)

Capitolo 2; Analisi del movimento
23
Per esempio l’asse x di un sistema di riferimento B sarà descritto rispetto al sistema A
dalla matrice:
AXB= 4cos(9)cos(;)cos(<)= (2.10)
Lo stesso procedimento vale sia per l’asse y che per l’asse z. Combinando le tre matrici si
avrà la matrice di rotazione ARB 3x3 che descrive l’orientazione di B rispetto ad A.
Il vettore posizione e la matrice di rotazione possono essere combinati in una matrice 4x4
nota come matrice di trasformazione ATB (eq. 2.11). I primi 3x3 elementi della matrice
sono la matrice di rotazione, i seguenti 3x1 sono il vettore posizione.
(2.11)
Questa matrice può essere utilizzata per descrivere una generale trasformazione di un
punto o un vettore da un sistema di riferimento rispetto ad un altro.
Le colonne della matrice di rotazione 3x3 sono mutualmente ortogonali e il suo
determinante è sempre +1; questo permette di applicare la formula di Cayley secondo la
quale per ogni matrice R esiste una matrice S tale che:
R=(I-S)-1 (I+S) (2.12)
dove I è la matrice identità 3x3.
La matrice S è descritta da tre parametri indipendenti ed è quindi possibile descrivere
ogni matrice di rotazione con soli tre parametri invece dei nove fin’ora utilizzati. Esistono
diversi metodi per la parametrizzazione di tale metodo, una dei più comuni utilizza gli
angoli di Eulero.

Sviluppo di un tool con Smart Analyzer per l’applicazione della calibrazione multipla alla stima della cinematica dell’arto superiore
24
2.4.2 Angoli di Eulero e Cardano
Il metodo più utilizzato per la descrizione dell’ orientazione biomeccanica è quello che
utilizza gli angoli di Eulero. Il sistema fisso A ed il sistema B inizialmente sono presi
coincidenti, gli angoli di Eulero descrivono una prima rotazione di B attorno all’asse zB di
un angolo α, segue una rotazione attorno all’asse yB di un angolo β e per finire una
rotazione attorno a xB di γ. Ogni rotazione avviene non attorno agli assi del sistema fisso
A ma a quelli del sistema mobile B.
La sequenza di rotazioni Z,Y,X non porta allo stessa posizione finale del sistema B nel
caso si utilizzi una sequenza del tipo X,Y,Z. La natura non commutativa delle rotazioni
non sorprende visto che queste derivano da matrici di rotazione, il cui prodotto è appunto
non commutativo. Per utilizzare la notazione di Eulero è necessario scomporre la matrice
di rotazione ARB in tre singole rotazioni: ARB= Rz(α) Ry(β) Rx(γ) (2.13)
Sono possibili dodici sequenze di Eulero, le sei classiche tra due sistemi di riferimento
descrivono sequenze in cui la prima rotazione avviene attorno ad un asse iniziale, la
seconda attorno ad un asse intermedio spostato e la terza sul primo asse due volte spostato
, cioè Z, Y ', Z ". Nelle altre sei, denominate come sequenze di Cardano-Bryant, le
rotazioni avvengono attorno a tutti e tre gli assi Z, Y ', X ". Quando si utilizzano sistemi
di questo tipo, il verificarsi di ‘gimbal lock’ è un problema; per i primi può avvenire
quando la seconda rotazione è nulla, per i secondi se la rotazione attorno al secondo asse
è di 90°. La condizione di singolarità porta due assi a disporsi parallelamente, rendendo la
matrice delle soluzioni introvabile.
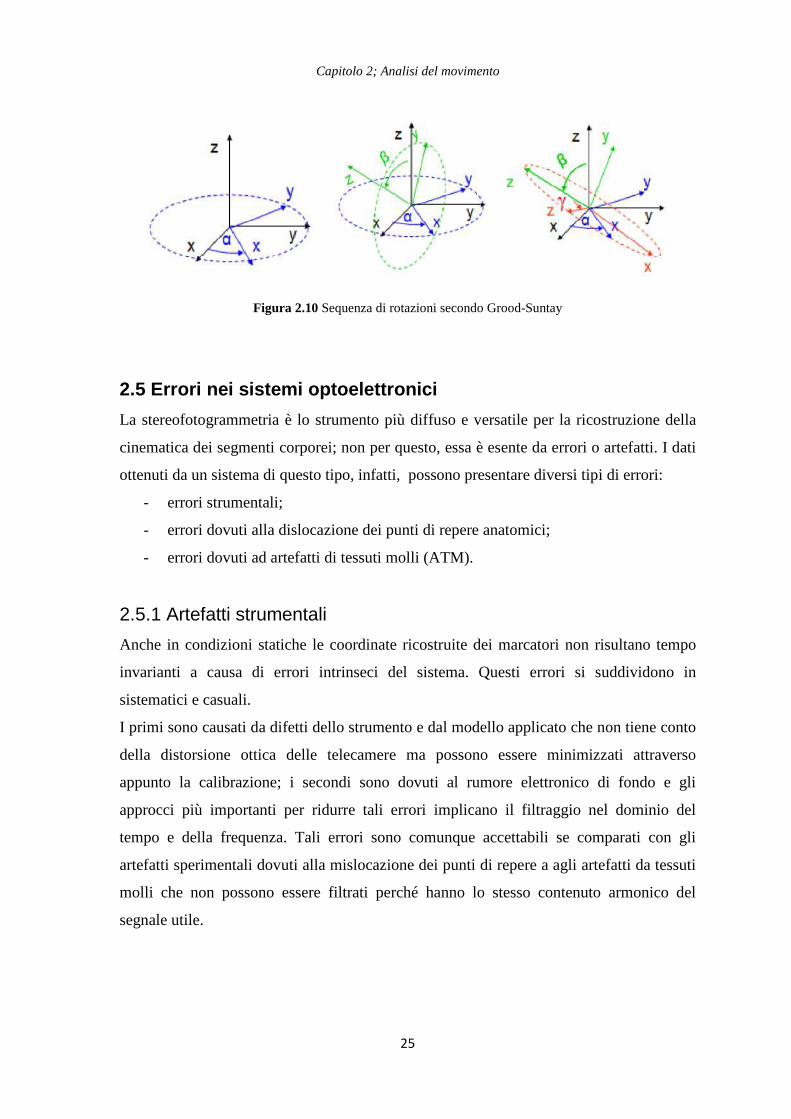
Solitamente in ambito biomeccanico, si utilizza la convenzione cardanica secondo
Grood&Suntay (vedi Fig.2.10), in cui gli assi di rotazione coincidono con gli assi
articolari e che prevede:
- una rotazione di α attorno all’asse z del sistema di riferimento mobile (all’inizio coincidente con l’asse z del sistema mobile)
- una rotazione di β attorno all’asse x del sistema di riferimento mobile, dopo che la prima rotazione è stata eseguita
- una rotazione di γ attorno all’asse y del sistema di riferimento mobile, dopo che le prime due rotazioni sono state eseguite
Capitolo 2; Analisi del movimento
25
Figura 2.10 Sequenza di rotazioni secondo Grood-Suntay
2.5 Errori nei sistemi optoelettronici
La stereofotogrammetria è lo strumento più diffuso e versatile per la ricostruzione della
cinematica dei segmenti corporei; non per questo, essa è esente da errori o artefatti. I dati
ottenuti da un sistema di questo tipo, infatti, possono presentare diversi tipi di errori:
- errori strumentali;
- errori dovuti alla dislocazione dei punti di repere anatomici;
- errori dovuti ad artefatti di tessuti molli (ATM).
2.5.1 Artefatti strumentali
Anche in condizioni statiche le coordinate ricostruite dei marcatori non risultano tempo
invarianti a causa di errori intrinseci del sistema. Questi errori si suddividono in
sistematici e casuali.
I primi sono causati da difetti dello strumento e dal modello applicato che non tiene conto
della distorsione ottica delle telecamere ma possono essere minimizzati attraverso
appunto la calibrazione; i secondi sono dovuti al rumore elettronico di fondo e gli
approcci più importanti per ridurre tali errori implicano il filtraggio nel dominio del
tempo e della frequenza. Tali errori sono comunque accettabili se comparati con gli
artefatti sperimentali dovuti alla mislocazione dei punti di repere a agli artefatti da tessuti
molli che non possono essere filtrati perché hanno lo stesso contenuto armonico del
segnale utile.
Sviluppo di un tool con Smart Analyzer per l’applicazione della calibrazione multipla alla stima della cinematica dell’arto superiore
26
2.5.2 Artefatti sperimentali
L’errore commesso nell’individuazione dei punti di repere sottocutanei sta nel fatto che
alcuni di questi in realtà non sono punti ma superfici larghe e irregolari, inoltre essi sono
ricoperti da uno strato di tessuto molle che può variare a seconda della zona in esame.
Alcuni punti di repere sono interni e non rilevabili mediante palpazione, per esempio il
centro dell’articolazione gleno-omerale nell’arto superiore. In letteratura sono presenti
diversi metodi per la loro determinazione che è pur sempre una stima della loro esatta
posizione.
Sta di fatto che una dislocazione dei punti di repere anatomici si propaga al calcolo della
posa dei sistemi anatomici e quindi anche al calcolo della cinematica articolare.
Nei vari protocolli sperimentali il cluster di marcatori che viene posato sulla cute è
definito solidale al segmento osseo sottostante, ma nella realtà, durante il movimento si
ha uno spostamento relativo tra i markers e il segmento osseo. Tale spostamento è dovuto
alla presenza di tessuti molli tra il punto dove è applicato il marker e l’osso. Come già
accennato in precedenza tale errore è critico in quanto non può essere eliminato tramite
tecniche di filtraggio. Per risolvere, o almeno ridurre questo artefatto sono state sviluppate
diverse tecniche (per esempio protocollo CAST e la doppia calibrazione paragrafo 2.6)
ma gli studi non si sono ancora fermati e continuano alla ricerca di una soluzione al
problema.
2.6 Protocolli per l’analisi del movimento
Nel capitolo 2.4 si è già definito cosa si intende per protocollo, ovvero un procedimento
che descrive primariamente il modello biomeccanico che meglio rappresenta la
cinematica dei segmenti rigidi in gioco. I punti fondamentali per l’implementazione di un
protocollo si possono trovare in quel che viene chiamato CAMAR-II (Computer Methods
and Programs in Biomedicine 45, 1994 11-13). Tale progetto è nato con lo scopo di
stabilire una rete Europea di laboratori clinici e di ricerca che praticassero l’analisi del
movimento in maniera standard. Sulla base del CAMARC-II, per la determinazione di un
opportuno marker set, nelle prove che si vogliono esaminare, devono essere garantiti i
seguenti punti:
• 3dimensionalita`
• Minimo di 3 marker per segmento
• Visibilita` dei marcatori
Capitolo 2; Analisi del movimento
27
• Massima affidabilità nella definizione dei piani anatomici, per garantire
un'interpretazione fisiologica e clinica oggettiva
• Punti di repere facilmente palpabili e identificabili
L’osservanza di queste piccole regole, se così le vogliamo chiamare, permette diversi
vantaggi nello studio dell’analisi del movimento tra cui:
• Alta accuratezza
• Facile applicabilità dei marcatori
• Riduzione del tempo necessario per la preparazione del paziente
• Riduzione dell'ingombro dell'apparecchiatura sperimentale
• Riduzione del tempo per la raccolta dei dati
• Minima variabilita` dei risultati inter-intraoperatore e intersoggetto
Tra gli obbiettivi del progetto CAMARC-II, oltre a quelli già accennati precedentemente
come la costruzione della rete Europea di laboratori e la definizione di protocolli per la
cattura/elaborazione dei dati, c’è lo sviluppo di un interfaccia guida per i clinici che
devono effettuare i test.
2.6.1 Protocollo CAST
La determinazione sperimentale della posizione e l’orientazione dei segmenti ossei nello
spazio sta alla base dell’analisi cinematica. Come già visto nel paragrafo 2.4 ad ogni
segmento è associato un sistema di riferimento locale che può essere completamente
descritto da un vettore posizione e una matrice di rotazione. I sistemi locali sono definiti a
partire da opportuni punti di repere in cui sono posizionari dei markers. Durante un
qualsiasi movimento questi markers, essendo disposti sulla cute del soggetto, possono
perdere la loro posizione originaria a causa del tessuto molle che si interpone tra l’osso e
il marker. Per ridurre questi artefatti da tessuti molli (ATM) è stato sviluppato il
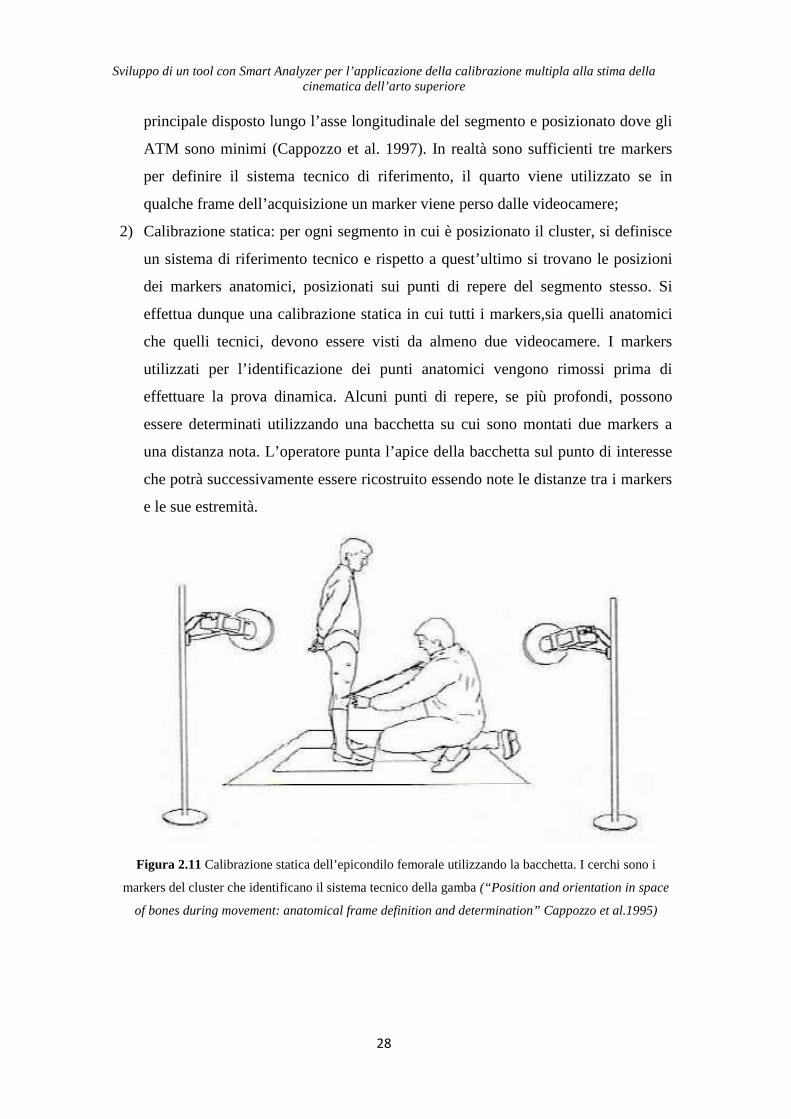
protocollo CAST (Calibrated Anatomical System Technique, vedi Fig.2.11) che appunto
facilita la stima della posizione dei punti anatomici necessari alla costruzione dei sistemi
locali, utilizzando dei cluster tecnici maggiormente visibili e che risentono meno degli
ATM. Il protocollo si articola in tre fasi:
1) Definizione del cluster tecnico: il cluster tecnico è definito da quattro markers
non allineati posti sulla superficie del segmento osseo in analisi, con l’asse
Sviluppo di un tool con Smart Analyzer per l’applicazione della calibrazione multipla alla stima della cinematica dell’arto superiore
28
principale disposto lungo l’asse longitudinale del segmento e posizionato dove gli
ATM sono minimi (Cappozzo et al. 1997). In realtà sono sufficienti tre markers
per definire il sistema tecnico di riferimento, il quarto viene utilizzato se in
qualche frame dell’acquisizione un marker viene perso dalle videocamere;
2) Calibrazione statica: per ogni segmento in cui è posizionato il cluster, si definisce
un sistema di riferimento tecnico e rispetto a quest’ultimo si trovano le posizioni
dei markers anatomici, posizionati sui punti di repere del segmento stesso. Si
effettua dunque una calibrazione statica in cui tutti i markers,sia quelli anatomici
che quelli tecnici, devono essere visti da almeno due videocamere. I markers
utilizzati per l’identificazione dei punti anatomici vengono rimossi prima di
effettuare la prova dinamica. Alcuni punti di repere, se più profondi, possono
essere determinati utilizzando una bacchetta su cui sono montati due markers a
una distanza nota. L’operatore punta l’apice della bacchetta sul punto di interesse
che potrà successivamente essere ricostruito essendo note le distanze tra i markers
e le sue estremità.
Figura 2.11 Calibrazione statica dell’epicondilo femorale utilizzando la bacchetta. I cerchi sono i
markers del cluster che identificano il sistema tecnico della gamba (“Position and orientation in space
of bones during movement: anatomical frame definition and determination” Cappozzo et al.1995)

Capitolo 2; Analisi del movimento
29
3) Ricostruzione dei markers anatomici: per ogni prova dinamica, verranno
ricostruiti i markers anatomici tenendo conto della posizione e dell’orientazione
del cluster rispetto alla sua posizione in statica. Per ridurre gli errori dovuti al
fatto che il cluster durante il movimento subisce delle deformazioni, sono stati
messi a punto metodi avanzati, basati su una stima ai minimi quadrati.
Minimizzare la somma delle distanze al quadrato tra le coppie ordinate di
marcatori corrisponde a trovare un minimo per l’energia potenziale (elastica)
immagazzinata nelle quattro molle (vedi Fig.2.12), assumendo che queste abbiano
la stessa rigidezza. Per la soluzione di questo problema di minimo viene
solitamente utilizzato il metodo della scomposizione ai valori singolari (Singular
Value Decomposition, Arun, Huang, Blostein, 1987). L’algoritmo SVD è
implementato nella maggior parte dei pacchetti software e non richiede una stima
iniziale dei parametri. Da questo calcolo e dalla calibrazione statica descritta al
punto 2) è possibile ricostruire la posizione dei markers anatomici anche se questi
non sono visibili dal sistema optoelettronico.
Figura 2.12 Interpretazione fisica del problema di stima ai minimi quadrati. I cerchi vuoti sono i
marcatori del cluster, supposto rigido; quelli pieni sono le posizioni dei marcatori misurate in un
certo frame. La posa ottima si ha minimizzando l’energia immagazzinata nelle molle (Cappello et
al. 1996)

Sviluppo di un tool con Smart Analyzer per l’applicazione della calibrazione multipla alla stima della cinematica dell’arto superiore
30
2.6.2 La calibrazione multipla
Uno degli obbiettivi base dell’analisi del movimento e anche del presente lavoro di tesi, è
la ricostruzione del movimento delle ossa rispetto al sistema di riferimento globale del
laboratorio. L’aspetto più critico è senz’altro il fatto che i markers posizionati sulla cute
non restano solidali al segmento osseo sottostante a causa del tessuto molle interposto
appunto tra osso e punto di applicazione del marker. L’uso dei sistemi tecnici e della
calibrazione anatomica introdotta dal protocollo CAST (Cappozzo et al. 1995)
rappresenta un primo passo per la risoluzione del problema sopra citato. Essa suggerisce
una prova statica di rilevazione dei markers anatomici rispetto ai cluster nella posizione
anatomica di riferimento, indipendentemente dall’esercizio fisico che si vuole analizzare.
L’uso di cluster associati ai segmenti ossei di interesse presenta diversi vantaggi ma
quando i cluster utilizzati sono direttamente applicati sulla cute la loro configurazione e la
calibrazione dei parametri variano nel tempo. Risulta quindi ragionabile pensare che la
ricostruzione delle traiettorie dei vari punti di repere deve essere costruita attraverso delle
calibrazioni multiple. Bisogna, quindi, ripetere la calibrazione di tutti i punti anatomici di
interesse in differenti pose, nel nostro caso, dell’arto superiore che compongono il
movimento in esame. In questo caso, al contrario del CAST, la configurazione del cluster
e la calibrazione dei parametri non sono considerati costanti ma dipendenti dal tempo. Per
procedere alla doppia calibrazione si prendono in esame due posizioni: quella iniziale t1 e
quella finale t2 del gesto motorio in esame. Le due configurazioni, quindi, presenteranno
delle differenze dovute agli artefatti da tessuti molli che modificano le distanze tra i
markers del cluster e quindi anche le traiettorie dei punti anatomici calibrati.
Figura 2.13 Cluster e punti anatomici nelle due configurazioni prese come riferimento per la doppia
calibrazione (Cappello et al. 1997)

Capitolo 2; Analisi del movimento
31
Tramite la tecnica SVD si trova il sistema di riferimento tecnico per ogni cluster di
entrambe le pose e si calibrano i punti anatomici associati. Si avranno così, per ogni punto
anatomico, due traiettorie, una rispetto al sistema tecnico iniziale al tempo t1 e una
rispetto a quello finale t2. Gli istanti di riferimento t1 e t2 corrispondono alle pose di
calibrazione negli estremi dell’esercizio fisico eseguito. In un dato istante intermedio ai
questi due tempi, il modello del cluster (Mod(t)) e la posizione dei punti di repere
anatomici (PRA(t)) sono dati da un’opportuna combinazione tra i due. Ad esempio,
interpolando linearmente rispetto al tempo, assunto come variabile indipendente,
all’istante t si avrà:
�%>(?) = �%>) + (�%>+ �%>)) ? ?)?+ ?) (2.14)
�!@(?) = �!@) + (�!@+ �!@)) ? ?)?+ ?)
Il metodo della calibrazione multipla deve essere comunque adatto allo specifico gesto
motorio a cui si intende applicarlo, scegliendo opportunamente le configurazioni di
riferimento.

Sviluppo di un tool con Smart Analyzer per l’applicazione della calibrazione multipla alla stima della cinematica dell’arto superiore
32
Capitolo 3
Biomeccanica dell’arto superiore 3.1 Definizione piani e assi anatomici
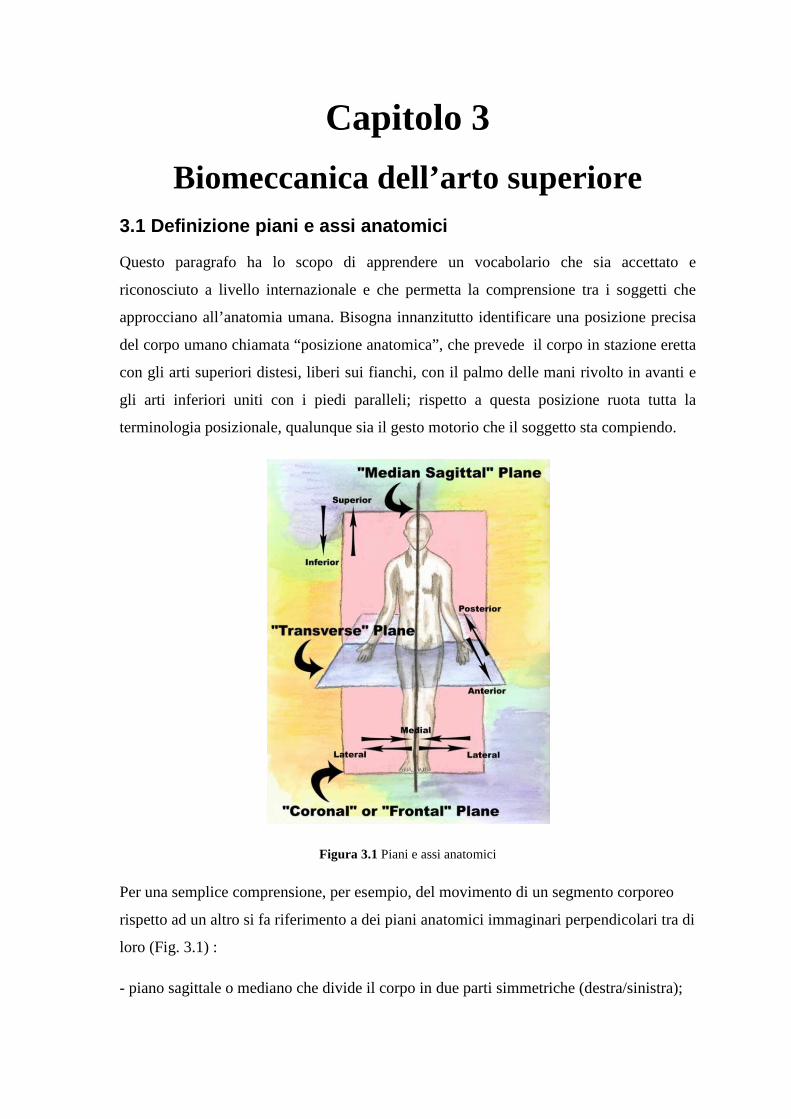
Questo paragrafo ha lo scopo di apprendere un vocabolario che sia accettato e
riconosciuto a livello internazionale e che permetta la comprensione tra i soggetti che
approcciano all’anatomia umana. Bisogna innanzitutto identificare una posizione precisa
del corpo umano chiamata “posizione anatomica”, che prevede il corpo in stazione eretta
con gli arti superiori distesi, liberi sui fianchi, con il palmo delle mani rivolto in avanti e
gli arti inferiori uniti con i piedi paralleli; rispetto a questa posizione ruota tutta la
terminologia posizionale, qualunque sia il gesto motorio che il soggetto sta compiendo.
Figura 3.1 Piani e assi anatomici
Per una semplice comprensione, per esempio, del movimento di un segmento corporeo
rispetto ad un altro si fa riferimento a dei piani anatomici immaginari perpendicolari tra di
loro (Fig. 3.1) :
- piano sagittale o mediano che divide il corpo in due parti simmetriche (destra/sinistra);

Sviluppo di un tool con Smart Analyzer per l’applicazione della calibrazione multipla alla stima della cinematica dell’arto superiore
34
- piano frontale o coronale che attraversa il corpo dall’alto in basso ad angolo retto col
piano sagittale e che divide il corpo in piani anteriori e superiori;
- piano trasversale o orizzontale perpendicolare agli altri due e che divide il corpo in piani
superiori ed inferiori.
Di rado i movimenti di un segmento avvengono su di un solo piano, solitamente si
verificano su due o tre piani contemporaneamente producendo un movimento complesso.
Per ogni piano può essere identificato un’asse (vedi Fig. 3.1) di solito associato ad una
particolare articolazione ed al suo movimento:
-asse orizzontale perpendicolare al piano sagittale;
-asse verticale perpendicolare al piano trasversale;
-asse antero-posteriore perpendicolare al piano frontale.
I movimenti che avvengono rispetto all’asse orizzontale sul piano sagittale si definiscono
flessione ed estensione; quelli rispetto all’asse antero-posteriore sul piano frontale
abduzione e adduzione e, infine quelli rispetto all’asse vericale sul piano trasversale si
definiscono intrarotazione ed extrarotazione.
Flessione
piegamento di segmenti adiacenti nel piano sagittale in modo tale che le loro superfici
siano avvicinate l’una all’altra.
Estensione
movimento che allontana due superfici opposte nel piano sagittale.
Abduzione
movimento di un segmento sul piano frontale che lo allontana dalla linea mediana del
corpo.
Adduzione
movimento di un segmento sul piano frontale che lo avvicina alla linea mediana del
corpo.
Intrarotazione
rotazione di un segmento di un arto attorno al suo asse longitudinale, in modo che la sua
superficie anteriore ruoti verso la linea mediana del corpo.
Extrarotazione
rotazione di un segmento di un arto attorno al suo asse longitudinale, in modo che la sua
superficie anteriore sia allontani da piano della linea mediana del corpo.

Capitolo 3: Biomeccanica dell’arto superiore
3.2 Struttura ossea dell’arto superiore
Andiamo a descrivere le ossa che compongono l’arto superiore e le loro interazioni ch
portano alla formazione delle articolazioni.
Le ossa che compongono l’arto superiore sono la clavicola e la scapola nel cingolo
scapolare, l’omero nel braccio, il radio e l’ulna nell’avambraccio e la mano, costituita da
innumerevoli ossicini, ma che nel
Figura 3.2 Regioni,ossa e articolazioni dell’arto superiore
dynamic during everyday tasks” Ingram, Murray
Capitolo 3: Biomeccanica dell’arto superiore
35
Struttura ossea dell’arto superiore
Andiamo a descrivere le ossa che compongono l’arto superiore e le loro interazioni ch
portano alla formazione delle articolazioni.
Le ossa che compongono l’arto superiore sono la clavicola e la scapola nel cingolo
scapolare, l’omero nel braccio, il radio e l’ulna nell’avambraccio e la mano, costituita da
innumerevoli ossicini, ma che nel nostro caso non analizzeremo (Fig. 3.2)
Regioni,ossa e articolazioni dell’arto superiore (“ Determining upper limb kinematics and
dynamic during everyday tasks” Ingram, Murray – 1999)
Andiamo a descrivere le ossa che compongono l’arto superiore e le loro interazioni che
Le ossa che compongono l’arto superiore sono la clavicola e la scapola nel cingolo
scapolare, l’omero nel braccio, il radio e l’ulna nell’avambraccio e la mano, costituita da
(Fig. 3.2).
Determining upper limb kinematics and

Sviluppo di un tool con Smart Analyzer per l’applicazione della calibrazione multipla alla stima della cinematica dell’arto superiore
36
CINGOLO SCAPOLARE
La clavicola e la scapola formano il cingolo scapolare che trasmette il peso dell’arto
superiore allo scheletro assiale e rende possibile un ampio raggio di movimenti.
La scapola è un osso piatto piano, largo, triangolare. La faccia costale, che guarda le
coste, leggermente scavata; quella dorsale guarda indietro e in fuori ed è divisa dalla
spina della scapola in due fosse. La spina della scapola ha due margini liberi, superiore e
inferiore, che divergono lateralmente per includere l’acromion. La testa della scapola è
una parte estesa dell’osso che si attacca all’osso piatto; in essa si trova la fossa glenoidea,
una concavità che si articola con la testa dell’omero a formare l’articolazione della spalla
(glenomerale).
La clavicola è un osso sottocutaneo che va, orizzontalmente, dallo sterno all’acromion. I
due terzi mediali della clavicola sono convessi in avanti; il terzo laterale è concavo in
avanti e appiattito dall’alto al basso. Si articola con il processo acromiale della scapola
lateralmente (articolazione acriomioclaveare) e con lo sterno medialmente (articolazione
sternoclaveare).
OMERO
E’ l’osso più grande dell’arto superiore costituito da uno stelo e due estremi.
Prossimalmente si articola con la cavità glenoidea della scapola nell’articolazione della
spalla e distalmente con il radio e l’ulna, nell’articolazione del gomito. La struttura
prossimale più importante è la testa dell’omero caratterizzata da una superficie liscia e
arrotondata. Il corpo dell’omero è pressoché cilindrico in alto e diventa triangolare nella
parte inferiore, espandendosi lateralmente. Presenta due superfici articolari separate da
una cresta: la superficie articolare laterale, il capitello, che si articola con il radio, con il
quale ha il massimo contatto quando il gomito è completamente flesso; la superficie
articolare mediale, la troclea, che si articola con l’ulna. Queste due superfici aricolari
vanno a formare l’articolazione del gomito. Medialmente alla troclea si trova il grande
epicondilo mediale e lateralmente al capitello vi è l’epicondilo laterale.
RADIO e ULNA
Sono le due ossa dell’avambraccio, il radio lateralmente e l’ulna medialmente.
In alto si articolano con l’omero al gomito mentre distalmente contribuiscono a formare il
polso.
Capitolo 3: Biomeccanica dell’arto superiore
37
Il radio è posto lateralmente ed è più corto dell’ulna. Si articola in alto con il capitello
dell’omero e in basso con lo scafoide e il semilunare della prima fila del carpo e ai due
estremi con l’ulna. La testa è un disco spesso, con una superficie concava per
l’articolazione con il capitello. Sotto la testa c’è il collo, ristretto, che devia medialmente
mentre si avvicina la diafisi. La diafisi è cilindrica, ma diventa triangolare più in basso.
La faccia articolare distale è concava e arriva fino all’apofisi stiloidea.
L’ulna è l’osso più lungo dell’avambraccio e si trova medialmente al radio. Ha una diafisi
e due estremi: il superiore più grande e presenta una proiezione ad uncino per
l’articolazione con la troclea omerale; il distale, più piccolo e arrotondato è la testa
dell’ulna. Essa non si articola direttamente con il carpo ma lateralmente ai due estremi
con il radio.
3.3 Articolazioni dell’arto superiore e movimenti
L’elevata mobilità dell’arto superiore è permessa dalla compartecipazione di tre
articolazioni:
-articolazione sternoclaveare che mette in rapporto la clavicola ed il torace;
-articolazione acromioclaveare tra scapola e clavicola;
-articolazione glenomerale tra omero e scapola.
A queste articolazioni vanno naturalmente aggiunte quella intermedia del gomito e quella
del polso. Quest’ultima non è una singola articolazione ma comprende le articolazioni tra
le ossa del carpo e l’articolazione con l’avambraccio.
In questo studio sono stati presi in considerazione i movimenti di tre di queste
articolazioni: quella sternoclaveare, quella glenomerale e quella del gomito.
3.3.1 Articolazione sternoclaveare
L’articolazione sternoclaveare fornisce l’unico punto di connessione osseo tra arto
superiore e tronco. Le superfici articolari sono una concava, l’altra convessa anche se non
hanno gradi di curvatura uguali. Anche se le superfici non concordano con quelle di
un’enartrosi, l’articolazione sternoclaveare ha comunque tre gradi di libertà di
movimento, elevazione e depressione,protazione e retrazione, rotazione assiale (vedi Fig.
3.3).

Sviluppo di un tool con Smart Analyzer per l’applicazione della calibrazione multipla alla stima della cinematica dell’arto superiore
38
Figura 3.3 Movimenti del cingolo scapolare; (a) Elevazione e depressione, (b) Protrazione e retrazione, (c)
Rotazione assiale (“Anatomia del movimento umano” Palastanga)
Elevazione e depressione
L’asse di rotazione per l’elevazione e la depressione è orizzontale e leggermente obliquo
in avanti e in fuori attraverso il legamento costoclaveare. L’ampiezza di movimento
dell’estremo laterale della clavicola è di circa 10 cm in elevazione e di 3 cm in
depressione, con un’ampiezza angolare totale di circa 60°.
Protazione e retrazione
L’asse di movimento di protazione e di retrazione si trova su un piano verticale che passa
obliquamente in basso e in fuori attraverso la porzione mediale del legamento
costoclaveare. L’ampiezza di movimento dell’estremo laterale della clavicola è di circa 5
cm in protazione e di 2 cm in retrazione, con un angolo totale di circa 35°.
Rotazione assiale
Capitolo 3: Biomeccanica dell’arto superiore
39
Mentre tutti i movimenti appena citati sono tutti attivi, cioè prodotti da un’azione
muscolare diretta, la rotazione assiale è prodotta dalla rotazione della scapola trasmessa
alla clavicola dal legamento coracoclaveare. Una rotazione assiale della sola clavicola è
impossibile in natura. L’asse passa per il centro della superficie articolare delle
articolazioni sternoclaveare e acriomclaveare. Il grado di rotazione assiale può variare dai
20° ai 40° a seconda della posizione della clavicola.
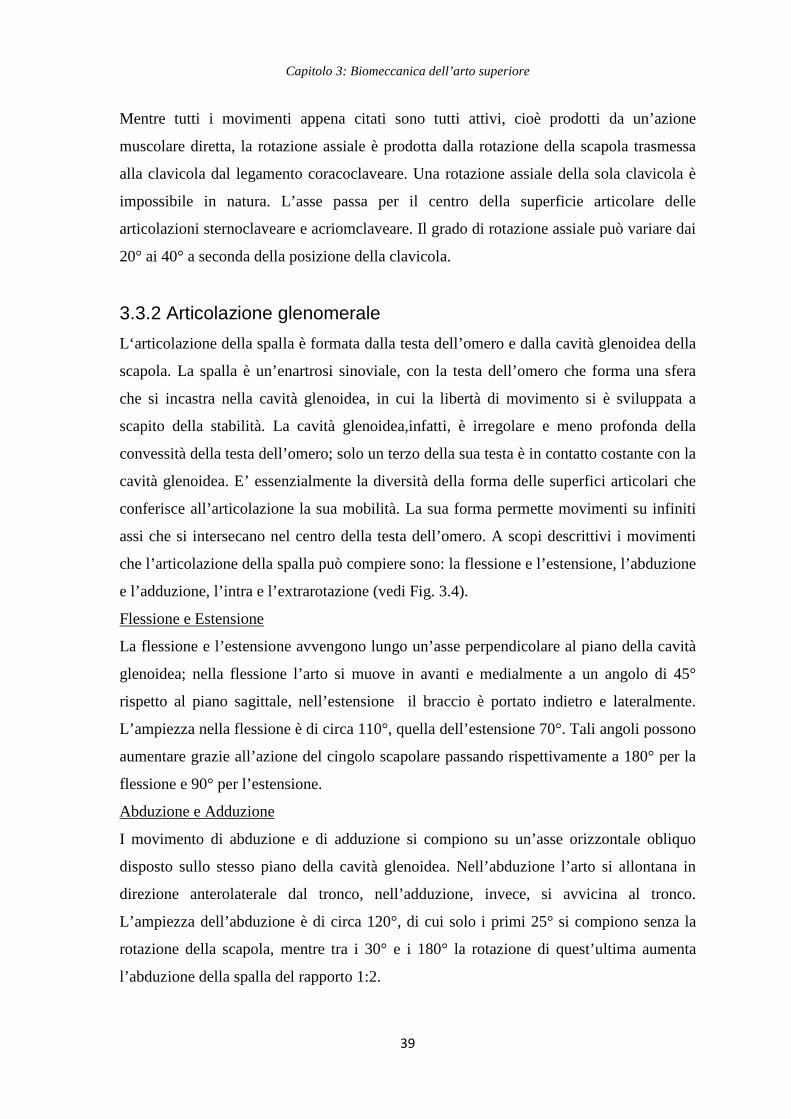
3.3.2 Articolazione glenomerale
L‘articolazione della spalla è formata dalla testa dell’omero e dalla cavità glenoidea della
scapola. La spalla è un’enartrosi sinoviale, con la testa dell’omero che forma una sfera
che si incastra nella cavità glenoidea, in cui la libertà di movimento si è sviluppata a
scapito della stabilità. La cavità glenoidea,infatti, è irregolare e meno profonda della
convessità della testa dell’omero; solo un terzo della sua testa è in contatto costante con la
cavità glenoidea. E’ essenzialmente la diversità della forma delle superfici articolari che
conferisce all’articolazione la sua mobilità. La sua forma permette movimenti su infiniti
assi che si intersecano nel centro della testa dell’omero. A scopi descrittivi i movimenti
che l’articolazione della spalla può compiere sono: la flessione e l’estensione, l’abduzione
e l’adduzione, l’intra e l’extrarotazione (vedi Fig. 3.4).
Flessione e Estensione
La flessione e l’estensione avvengono lungo un’asse perpendicolare al piano della cavità
glenoidea; nella flessione l’arto si muove in avanti e medialmente a un angolo di 45°
rispetto al piano sagittale, nell’estensione il braccio è portato indietro e lateralmente.
L’ampiezza nella flessione è di circa 110°, quella dell’estensione 70°. Tali angoli possono
aumentare grazie all’azione del cingolo scapolare passando rispettivamente a 180° per la
flessione e 90° per l’estensione.
Abduzione e Adduzione
I movimento di abduzione e di adduzione si compiono su un’asse orizzontale obliquo
disposto sullo stesso piano della cavità glenoidea. Nell’abduzione l’arto si allontana in
direzione anterolaterale dal tronco, nell’adduzione, invece, si avvicina al tronco.
L’ampiezza dell’abduzione è di circa 120°, di cui solo i primi 25° si compiono senza la
rotazione della scapola, mentre tra i 30° e i 180° la rotazione di quest’ultima aumenta
l’abduzione della spalla del rapporto 1:2.

Sviluppo di un tool con Smart Analyzer per l’applicazione della calibrazione multipla alla stima della
L’adduzione oltre la posizione neutra dell’articolazio
possibile per la presenza del tronco.
Intra - ed Extrarotazione
Le rotazioni avvengono su un’asse longitudinale che passa lungo l’omero.
Nell’extrarotazione, la superficie anteriore dell’omero viene portata
lateralmente,nell’intrarotazione viene, invece portata verso il tronco. Per valutare
l’intrarotazione massima che è di circa 90°, l’avambraccio è portato dietro il tronco
perché quest’ultimo, anteriormente, ostacola tale movimento. L’ampiezza
dell’extrarotazione è di circa 80°.
Figura 3.4 Movimenti dell’articolazione della spalla (a) flessione ed estensione, (b) abduzione e adduzione,
(c) intra- extrarotazione
Sviluppo di un tool con Smart Analyzer per l’applicazione della calibrazione multipla alla stima della cinematica dell’arto superiore
40
L’adduzione oltre la posizione neutra dell’articolazione (posizione anatomica) non è
possibile per la presenza del tronco.
Le rotazioni avvengono su un’asse longitudinale che passa lungo l’omero.
Nell’extrarotazione, la superficie anteriore dell’omero viene portata
intrarotazione viene, invece portata verso il tronco. Per valutare
l’intrarotazione massima che è di circa 90°, l’avambraccio è portato dietro il tronco
perché quest’ultimo, anteriormente, ostacola tale movimento. L’ampiezza
80°.
Movimenti dell’articolazione della spalla (a) flessione ed estensione, (b) abduzione e adduzione,
extrarotazione (“Anatomia del movimento umano” Palastanga)
Sviluppo di un tool con Smart Analyzer per l’applicazione della calibrazione multipla alla stima della
ne (posizione anatomica) non è
Le rotazioni avvengono su un’asse longitudinale che passa lungo l’omero.
Nell’extrarotazione, la superficie anteriore dell’omero viene portata
intrarotazione viene, invece portata verso il tronco. Per valutare
l’intrarotazione massima che è di circa 90°, l’avambraccio è portato dietro il tronco
perché quest’ultimo, anteriormente, ostacola tale movimento. L’ampiezza
Movimenti dell’articolazione della spalla (a) flessione ed estensione, (b) abduzione e adduzione,
(“Anatomia del movimento umano” Palastanga)

Capitolo 3: Biomeccanica dell’arto superiore
3.3.3 Articolazione del gomito
Il gomito è l’articolazione intermedia
l’avambraccio. L’articolazione è a cerniera e coinvolge tre ossa: l’estremo distale
dell’omero e le estremità prossimali di radio e ulna. Gli assi maggiori di omero e ulna
coincidono se visti lateralmente. Gu
lateralmente rispetto a quello omerale. Tale deviazione è detta valgismo fisiologico e
varia dai 10° ai 15° per gli uomini e dai 20° ai 25° per le donne. I movimenti possibili
dell’articolazione del gomito sono l
trasversale che passa attraverso gli epicondili omerali
perpendicolare all’asse principale dell’omero o dell’avambraccio ma biseca l’angolo di
valgismo.
Flessione e Estensione
La flessione è il movimento che avviene anteriormente e porta l’avambraccio verso l’alto.
L’ampiezza attiva della flessione è di 145°, quella passiva può raggiungere i 160°.
L’estensione è quel movimento che riporta l’avambraccio nella sua posizione anato
da una posizione iniziale di flessione. In poche parole, l’ampiezza dell’estensione
dell’articolazione è zero.
Figura 3.5 (a) Assi e valgismo dell’articolazione del gomito, (b) Movimenti di flesso
(“Anatomia del movimento umano” Palastang
Capitolo 3: Biomeccanica dell’arto superiore
41
Articolazione del gomito
Il gomito è l’articolazione intermedia dell’arto superiore e si trova tra il braccio e
l’avambraccio. L’articolazione è a cerniera e coinvolge tre ossa: l’estremo distale
dell’omero e le estremità prossimali di radio e ulna. Gli assi maggiori di omero e ulna
coincidono se visti lateralmente. Guardandoli frontalmente, l’asse ulnare devia
lateralmente rispetto a quello omerale. Tale deviazione è detta valgismo fisiologico e
varia dai 10° ai 15° per gli uomini e dai 20° ai 25° per le donne. I movimenti possibili
dell’articolazione del gomito sono la flessione e l’estensione attorno ad un’asse
trasversale che passa attraverso gli epicondili omerali (vedi Fig. 3.5). Questo asse non è
perpendicolare all’asse principale dell’omero o dell’avambraccio ma biseca l’angolo di
La flessione è il movimento che avviene anteriormente e porta l’avambraccio verso l’alto.
L’ampiezza attiva della flessione è di 145°, quella passiva può raggiungere i 160°.
L’estensione è quel movimento che riporta l’avambraccio nella sua posizione anato
da una posizione iniziale di flessione. In poche parole, l’ampiezza dell’estensione
(a) Assi e valgismo dell’articolazione del gomito, (b) Movimenti di flesso
(“Anatomia del movimento umano” Palastanga)
dell’arto superiore e si trova tra il braccio e
l’avambraccio. L’articolazione è a cerniera e coinvolge tre ossa: l’estremo distale
dell’omero e le estremità prossimali di radio e ulna. Gli assi maggiori di omero e ulna
ardandoli frontalmente, l’asse ulnare devia
lateralmente rispetto a quello omerale. Tale deviazione è detta valgismo fisiologico e
varia dai 10° ai 15° per gli uomini e dai 20° ai 25° per le donne. I movimenti possibili
a flessione e l’estensione attorno ad un’asse
. Questo asse non è
perpendicolare all’asse principale dell’omero o dell’avambraccio ma biseca l’angolo di
La flessione è il movimento che avviene anteriormente e porta l’avambraccio verso l’alto.
L’ampiezza attiva della flessione è di 145°, quella passiva può raggiungere i 160°.
L’estensione è quel movimento che riporta l’avambraccio nella sua posizione anatomica
da una posizione iniziale di flessione. In poche parole, l’ampiezza dell’estensione
(a) Assi e valgismo dell’articolazione del gomito, (b) Movimenti di flesso-estensione
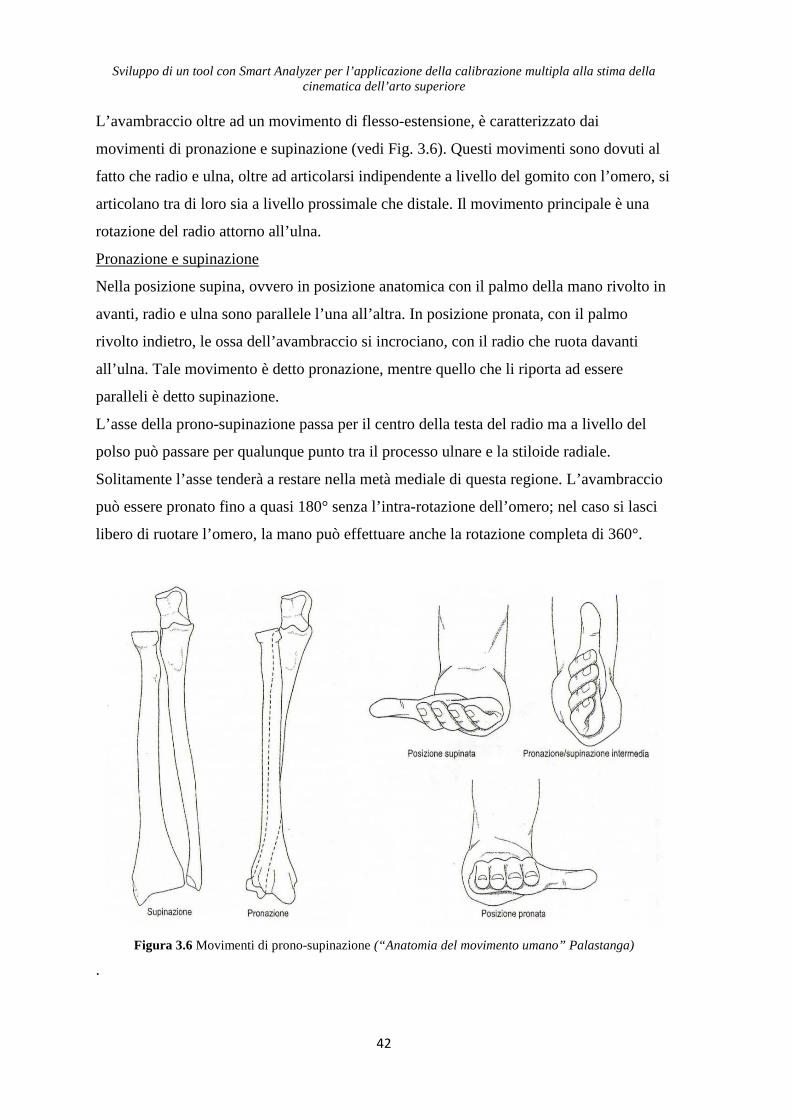
Sviluppo di un tool con Smart Analyzer per l’applicazione della calibrazione multipla alla stima della cinematica dell’arto superiore
42
L’avambraccio oltre ad un movimento di flesso-estensione, è caratterizzato dai
movimenti di pronazione e supinazione (vedi Fig. 3.6). Questi movimenti sono dovuti al
fatto che radio e ulna, oltre ad articolarsi indipendente a livello del gomito con l’omero, si
articolano tra di loro sia a livello prossimale che distale. Il movimento principale è una
rotazione del radio attorno all’ulna.
Pronazione e supinazione
Nella posizione supina, ovvero in posizione anatomica con il palmo della mano rivolto in
avanti, radio e ulna sono parallele l’una all’altra. In posizione pronata, con il palmo
rivolto indietro, le ossa dell’avambraccio si incrociano, con il radio che ruota davanti
all’ulna. Tale movimento è detto pronazione, mentre quello che li riporta ad essere
paralleli è detto supinazione.
L’asse della prono-supinazione passa per il centro della testa del radio ma a livello del
polso può passare per qualunque punto tra il processo ulnare e la stiloide radiale.
Solitamente l’asse tenderà a restare nella metà mediale di questa regione. L’avambraccio
può essere pronato fino a quasi 180° senza l’intra-rotazione dell’omero; nel caso si lasci
libero di ruotare l’omero, la mano può effettuare anche la rotazione completa di 360°.
Figura 3.6 Movimenti di prono-supinazione (“Anatomia del movimento umano” Palastanga)
.

Capitolo 3: Biomeccanica dell’arto superiore
43
3.4 Protocolli per l’analisi del movimento dell’art o superiore Come già accennato nel Cap. 2.4 alla base dell’analisi del movimento, o più precisamente
per la descrizione dell’orientamento e la posizione di un segmento osseo c’è
l’implementazione di un protocollo. Il protocollo deve in primo luogo descrivere il
modello biomeccanico che meglio approssima la cinematica dei vari segmenti ossei in
esame. Per l’analisi dell’arto superiore ci viene in aiuto un modello segmentale proposto
da Cutti et al. 2009 composto da quattro segmenti (torace, cingolo scapolare, omero e
avambraccio) e nove gradi di libertà (vedi Fig.3.7).
Figura 3.7 Esempio modello meccanico equivalente per l’arto superiore. In (a) i linkage(tratti neri) e le articolazioni (quadrati bianchi). In (b) sono descritti i gradi di libertà delle articolazioni.
Nel modello, vengono innanzitutto identificate le articolazioni e i segmenti ossei di cui si
vuole studiare la cinematica specificando il numero di segmenti (linkage) e il numero di
gradi libertà di ogni articolazione. In particolare il cingolo scapolare è definito come il
segmento che connette il punto medio tra l’incisura giugulare IJ e la settima vertebra
cervicale C7 e il centro di rotazione glenomerale GH (vedi Fig.3.10). Il gomito è
modellato come un’articolazione universale con due gradi di libertà: flesso-estensione e

Sviluppo di un tool con Smart Analyzer per l’applicazione della calibrazione multipla alla stima della cinematica dell’arto superiore
44
prono-supinazione. Quando l’articolazione viene analizzata sul piano frontale essa
presenta un particolare offset, formato tra l’asse lungo dell’avambraccio e l’asse lungo del
braccio denominato carrying angle (Fig.3.8). Esso è universalmente riconosciuto come
l’angolo formato per la diversa orientazione della diafisi omerale e di quella ulnare,
maggiormente visibile quando l’arto superiore `e in massima estensione.
Figura 3.8 Rappresentazione del carrying angle (“Studio cinematico dell’articolazione del gomito”
Zampagni)
L’articolazione glenomerale è modellata con un giunto a sfera con tre gradi di liberta:
flesso-estensione, abduzione-adduzione e rotazione interna-esterna. L’articolazione tra
cingolo scapolare e torace (sterno claveare) è modellata con due gradi di libertà:
elevazione-depressione e protrazione-retrazione (Fig.3.9).

Capitolo 3: Biomeccanica dell’arto superiore
45
Figura 3.9 Giunto universale e giunto a sfera rispettivamente modelli dell’articolazione del gomito e della
spalla (“giunti meccanici” Wikipedia)
Uno dei problemi maggiori dell’analisi del movimento è stata la standardizzazione del
linguaggio. Il punto di partenza, per creare una standard nell’analisi dell’arto superiore, è
una pubblicazione di Van der Helm (1996), alla quale se ne sono susseguite altre fino
all’entrata in gioco dell’International Shoulder Group (ISG) che nel 2005 ha proposto un
set standard di punti di repere su cui apporre i markers (vedi Fig.3.10) e le linee guida per
la creazione dei sistemi di riferimento anatomici solidali ai segmenti ossei che
compongono l’arto.
Figura 3.10 Punti di repere anatomici sulla base dei quali vengono definiti i sistemi di riferimento
anatomici (G. Wu et al. 2005)

Sviluppo di un tool con Smart Analyzer per l’applicazione della calibrazione multipla alla stima della cinematica dell’arto superiore
46
Il centro dell’articolazione glenomerale GH, non è un punto di repere. Nel corso degli
anni sono stati sviluppate diverse metodologie per la sua stima, in quanto la sua posizione
interna non ne permette la rilevazione diretta attraverso palpazione. GH può essere
stimato utilizzando l’equazione di regressione descritta in Meskers et al.,1998, calcolando
io attraverso l’approccio geometrico descritto in De Leva, 2006.

Capitolo 4
Materiali e metodi 4.1 Introduzione
In questo lavoro di tesi è stato preso in considerazione l’arto superiore con l’obbiettivo di
implementare un protocollo per la sua analisi cinematica. La complessità dei suoi
movimenti ci ha portato a definire un modello che rappresenta una semplificazione della
realtà ma che comunque ben approssima i segmenti e le articolazioni che lo compongono.
Il modello implementato si riferisce agli studi sull’arto superiore, presenti in letteratura
(Cutti et al., ISG… vedi Cap.3.4). Tutte le acquisizioni sono state effettuate nel
laboratorio presente in BTS dove solitamente vengono testate le apparecchiature prima di
procedere alla loro distribuzione. I dati ottenuti sono stati poi elaborati tramite opportuni
software forniti sempre da BTS e descritti nel Cap. 1. Il laboratorio, solitamente sede di
test e prove per la valutazione funzionale delle apparecchiature prodotte in BTS, è stato
allestito con otto telecamere digitali con risoluzione 650x480 a 200 Hz, (vedi Fig.4.1)
che utilizzano sensori a elevata sensibilità e illuminatori dal design innovativo e
funzionale, la cui alta potenza di irraggiamento, combinata all’alta risoluzione della
telecamera, aumenta il volume di lavoro e consente la cattura di movimenti rapidi e
impercettibili.
Figura 4.1 Set-up delle telecamere e volume di acquisizione
Sviluppo di un tool con Smart Analyzer per l’applicazione della calibrazione multipla alla stima della cinematica dell’arto superiore
48
Il sistema optoelettronico BTS SMART-DX 300, si completava con una data station per
l’integrazione,la sincronizzazione e la gestione di tutte le informazioni cinematiche,
cinetiche, elettromiografiche e video provenienti da dispositivi collegati. Nello studio in
esame, essendo la stima cinematica l’oggetto di interesse, non sono state utilizzate né
pedane di forza, né dispositivi elettromiografici. Il sistema quindi, attraverso la
rilevazione di markers fluorescenti posti in determinati punti di repere, è in grado di
calcolarne le coordinate 3D rispetto ad un sistema globale del laboratorio e da queste
ricavare, mediante dei sistemi di riferimento locali, gli angoli di rotazione delle
articolazioni che caratterizzano l’arto superiore.
4.2 Protocollo di acquisizione
4.2.1 Set-up di acquisizione
Nello studio in esame è stato utilizzato un set di 25 markers (Cutti et al. 2005) che sono
stati posti direttamente sulla pelle del soggetto in esame. I markers hanno un diametro di
1 cm e sono attaccati tramite del semplice biadesivo. Si possono differenziare due tipi di
markers: quelli anatomici e quelli tecnici. Gli anatomici sono stati posti in particolare
posizioni, definite anche punti di repere, seguendo le indicazioni ISG (vedi Cap.3.4),
attraverso palpazione:
C7: settimana vertebra cervicale
IJ: incisura giugulare
PX: processo xifoideo
T8: ottava vertebra toracica
L5: quinta vertebra lombare
RA:acromion destro
LA: acromion sinistro
Mk9: angolo inferiore della scapola
REL: epicondilo laterale dell’omero
REM:epicondilo mediale dell’omero
RRS: processo stiloideo del radio
RUS: processo stiloideo dell’ulna
RH: punto terminale della mano posto in punto a piacere

Capitolo 4: Materiali e metodi
49
A questi, se ne aggiungono altri che vengono calcolati utilizzando le informazioni relative
ai punti di repere anatomici sopra elencati:
RE: punto intermedio ai due epicondili (RE=(REL+REM)/2);
RF: punto intermedio tra i due processi stiloidei (RF=(RRS+RUS)/2);
GH: centro di rotazione articolare calcolato mediante approccio geometrico
Per il calcolo del centro dell’articolazione glenomerale è stato utilizzato l’approccio
geometrico (De Leva 1996) dove GH è definito ponendolo su un asse che va dal punto
più craniale dell'articolazione del gomito (REL epicondilo laterale) all’acromion (RA), e
ponendolo, da quest’ultimo, ad una coordinata longitudinale pari al 9.83% della distanza
tra centro dell'articolazione del gomito (RE) e acromion.
Figura 4.2 Configurazione dei markers anatomici e dei cluster cutanei utilizzati per l’acquisizione delle
prove

Sviluppo di un tool con Smart Analyzer per l’applicazione della calibrazione multipla alla stima della cinematica dell’arto superiore
50
I markers tecnici, invece, sono utilizzati per definire il cluster tecnico di ogni segmento di
interesse, necessario per l’applicazione del protocollo CAST:
BR1
BR2 markers del cluster tecnico del braccio
BR3
BR4
AVR1
AVR2 markers del cluster tecnico dell’avambraccio
AVR3
AVR4
cl1
cl2 markers del cluster tecnico del torace
cl3
cl4
Questi cluster tecnici sono usati per stimare nelle acquisizioni dinamiche i punti di repere
anatomici sopra citati.

Capitolo 4: Materiali e metodi
51
4.2.2 Definizione dei sistemi di riferimento anatomici e degli angoli
Per definire gli angoli di rotazione di ogni articolazione, sono costruite delle terne di
riferimento anatomiche prossimalmente e distalmente all’articolazione stessa. Queste
terne sono identificate grazie ai punti di repere che costituiscono il modello e gli angoli
definiti da opportune sequenze di rotazioni attorni ai tre assi che costituiscono la terna
(sequenze di Eulero) in modo da portare le due terne da una posizione iniziale dove sono
ipoteticamente allineate, alla posizione finale che è quella effettivamente presente durante
il frame in esame. I sistemi di riferimento di torace, braccio e avambraccio sono costruiti
utilizzando le convenzioni standard ISG . Per ogni segmento Y è l’asse longitudinale
mentre X e Z sono rispettivamente l’asse medio-laterale e antero-posteriore.
Torace (Thorax)
Ot: l’origine coincidente a IJ;
Yt: lungo la linea che connette il punto medio tra PX e T8 e il punto medio tra IJ e C7,
verso l’alto;
Xt: lungo la perpendicolare al piano formato da IJ, C7 e il punto medio tra PX e T8, verso
destra;
Zt: perpendicolare a Yt e Xt.
Braccio (Humerus)
Oh: l’origine coincidente a GH;
Yh: lungo la linea che connette GH e il punto medio tra REL e REM, verso GH;
Zh: lungo la perpendicolare al piano formato da REL, REM e GH, con verso antero-
posteriore;
Xh: perpendicolare a Yh e Zh.
Avambraccio (Forearm)
Of: l’origine in RE;
Yf: lungo la linea che connette RF ad RE, verso RE;
Zf: perpendicolare al piano formato dal versore Yf e dal vettore che va da RRS a RUS,
antero-posteriore;
Xf: perpendicolare a Yf e Xf;
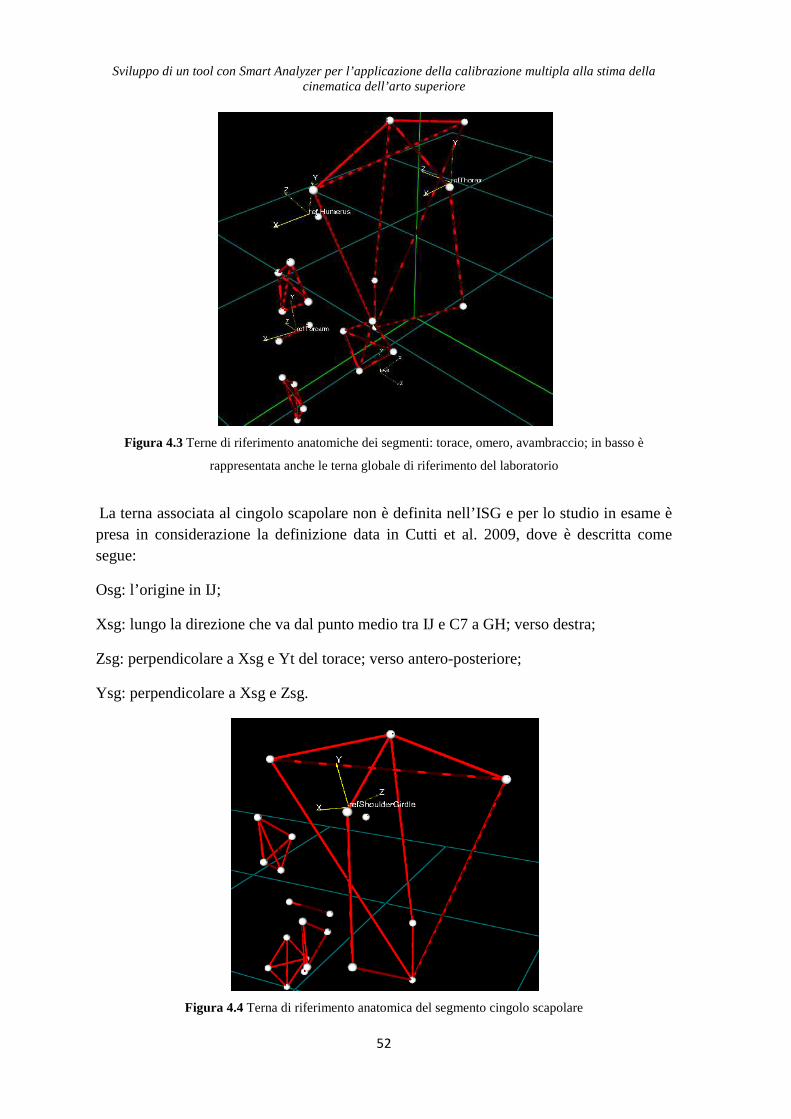
Sviluppo di un tool con Smart Analyzer per l’applicazione della calibrazione multipla alla stima della cinematica dell’arto superiore
52
Figura 4.3 Terne di riferimento anatomiche dei segmenti: torace, omero, avambraccio; in basso è
rappresentata anche le terna globale di riferimento del laboratorio
La terna associata al cingolo scapolare non è definita nell’ISG e per lo studio in esame è presa in considerazione la definizione data in Cutti et al. 2009, dove è descritta come segue:
Osg: l’origine in IJ;
Xsg: lungo la direzione che va dal punto medio tra IJ e C7 a GH; verso destra;
Zsg: perpendicolare a Xsg e Yt del torace; verso antero-posteriore;
Ysg: perpendicolare a Xsg e Zsg.
Figura 4.4 Terna di riferimento anatomica del segmento cingolo scapolare
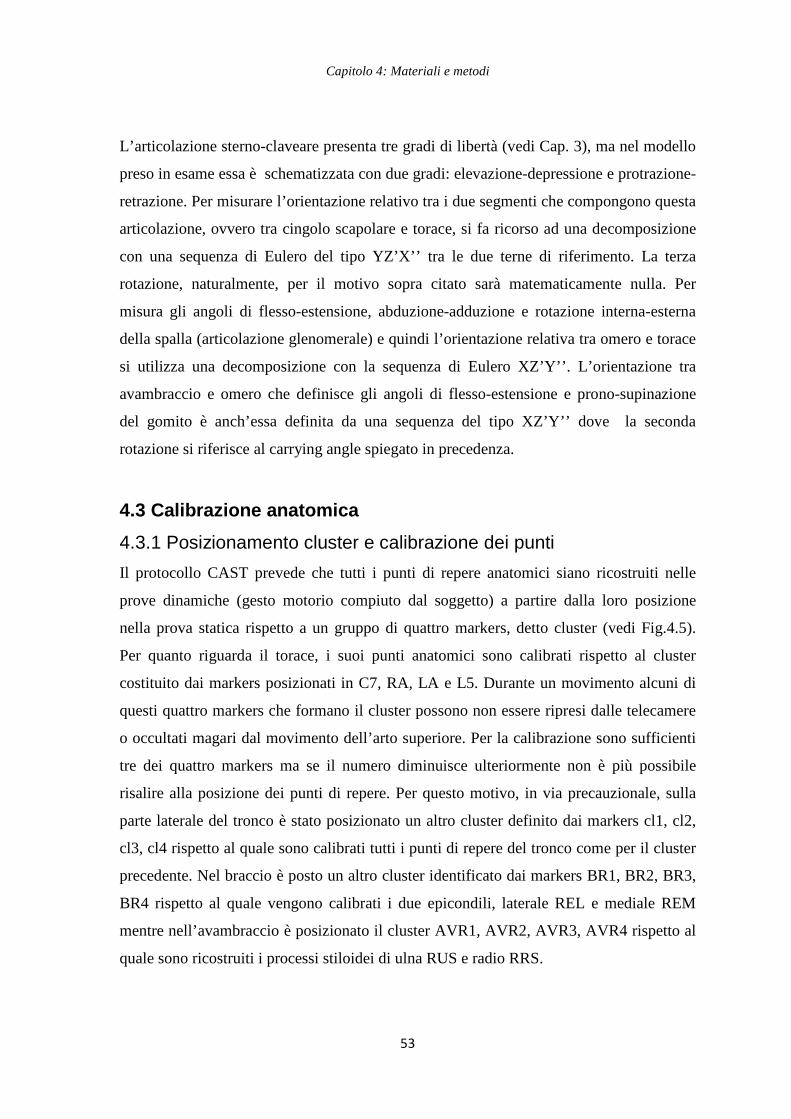
Capitolo 4: Materiali e metodi
53
L’articolazione sterno-claveare presenta tre gradi di libertà (vedi Cap. 3), ma nel modello
preso in esame essa è schematizzata con due gradi: elevazione-depressione e protrazione-
retrazione. Per misurare l’orientazione relativo tra i due segmenti che compongono questa
articolazione, ovvero tra cingolo scapolare e torace, si fa ricorso ad una decomposizione
con una sequenza di Eulero del tipo YZ’X’’ tra le due terne di riferimento. La terza
rotazione, naturalmente, per il motivo sopra citato sarà matematicamente nulla. Per
misura gli angoli di flesso-estensione, abduzione-adduzione e rotazione interna-esterna
della spalla (articolazione glenomerale) e quindi l’orientazione relativa tra omero e torace
si utilizza una decomposizione con la sequenza di Eulero XZ’Y’’. L’orientazione tra
avambraccio e omero che definisce gli angoli di flesso-estensione e prono-supinazione
del gomito è anch’essa definita da una sequenza del tipo XZ’Y’’ dove la seconda
rotazione si riferisce al carrying angle spiegato in precedenza.
4.3 Calibrazione anatomica
4.3.1 Posizionamento cluster e calibrazione dei punti
Il protocollo CAST prevede che tutti i punti di repere anatomici siano ricostruiti nelle
prove dinamiche (gesto motorio compiuto dal soggetto) a partire dalla loro posizione
nella prova statica rispetto a un gruppo di quattro markers, detto cluster (vedi Fig.4.5).
Per quanto riguarda il torace, i suoi punti anatomici sono calibrati rispetto al cluster
costituito dai markers posizionati in C7, RA, LA e L5. Durante un movimento alcuni di
questi quattro markers che formano il cluster possono non essere ripresi dalle telecamere
o occultati magari dal movimento dell’arto superiore. Per la calibrazione sono sufficienti
tre dei quattro markers ma se il numero diminuisce ulteriormente non è più possibile
risalire alla posizione dei punti di repere. Per questo motivo, in via precauzionale, sulla
parte laterale del tronco è stato posizionato un altro cluster definito dai markers cl1, cl2,
cl3, cl4 rispetto al quale sono calibrati tutti i punti di repere del tronco come per il cluster
precedente. Nel braccio è posto un altro cluster identificato dai markers BR1, BR2, BR3,
BR4 rispetto al quale vengono calibrati i due epicondili, laterale REL e mediale REM
mentre nell’avambraccio è posizionato il cluster AVR1, AVR2, AVR3, AVR4 rispetto al
quale sono ricostruiti i processi stiloidei di ulna RUS e radio RRS.
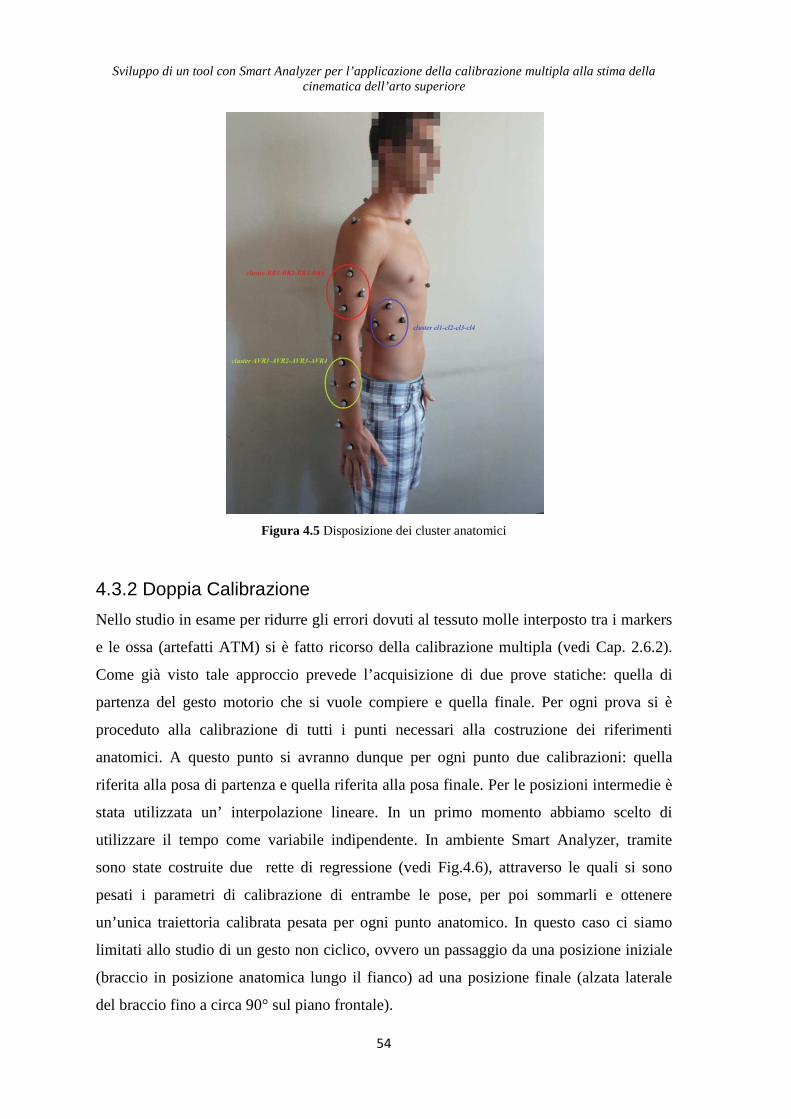
Sviluppo di un tool con Smart Analyzer per l’applicazione della calibrazione multipla alla stima della cinematica dell’arto superiore
54
Figura 4.5 Disposizione dei cluster anatomici
4.3.2 Doppia Calibrazione
Nello studio in esame per ridurre gli errori dovuti al tessuto molle interposto tra i markers
e le ossa (artefatti ATM) si è fatto ricorso della calibrazione multipla (vedi Cap. 2.6.2).
Come già visto tale approccio prevede l’acquisizione di due prove statiche: quella di
partenza del gesto motorio che si vuole compiere e quella finale. Per ogni prova si è
proceduto alla calibrazione di tutti i punti necessari alla costruzione dei riferimenti
anatomici. A questo punto si avranno dunque per ogni punto due calibrazioni: quella
riferita alla posa di partenza e quella riferita alla posa finale. Per le posizioni intermedie è
stata utilizzata un’ interpolazione lineare. In un primo momento abbiamo scelto di
utilizzare il tempo come variabile indipendente. In ambiente Smart Analyzer, tramite
sono state costruite due rette di regressione (vedi Fig.4.6), attraverso le quali si sono
pesati i parametri di calibrazione di entrambe le pose, per poi sommarli e ottenere
un’unica traiettoria calibrata pesata per ogni punto anatomico. In questo caso ci siamo
limitati allo studio di un gesto non ciclico, ovvero un passaggio da una posizione iniziale
(braccio in posizione anatomica lungo il fianco) ad una posizione finale (alzata laterale
del braccio fino a circa 90° sul piano frontale).

Capitolo 4: Materiali e metodi
55
Figura 4.6 rette di regressione utilizzate come fattore peso rispettivamente per la posa iniziale e quella
finale del gesto motorio analizzato
Successivamente si è pensato di migliorare il protocollo, estendendolo anche per un gesto
che prevede il ritorno alla posizione di partenza, utilizzando come fattore peso non più il
tempo ma un determinato angolo preso come riferimento. L’angolo in questione è stato
trovato utilizzando i punti anatomici non calibrati, identificati dai markers posti sul
soggetto in esame durante la prova statica. In assenza di questi, prima di procedere alla
doppia calibrazione, è necessario definire un set di markers calibrati.
Sono stati presi in considerazione due gesti ciclici:
- alzata laterale (fino a circa i 90°) e ritorno del braccio alla posizione anatomica di
riferimento (MOV1);
- estensione del gomito in pronazione partendo da gomito flesso e ritorno (MOV2).
Nel primo gesto motorio preso in esame, MOV1, l’articolazione che maggiormente lavora
è quella della spalla. Per l’analisi cinematica di questo movimento sono state acquisite tre
prove statiche: quella iniziale con braccio disteso lungo il corpo, quella finale con braccio

Sviluppo di un tool con Smart Analyzer per l’applicazione della calibrazione multipla alla stima della cinematica dell’arto superiore
56
alzato a circa 90° ed una posizione intermedia. Per ogni statica si è effettuato la
calibrazione di tutti i punti anatomici descritti nel Cap.4.2 ottenendo così per ogni punto
tre serie di calibrazioni. Sfruttando il fatto che il gesto motorio in esame risulta
principalmente costituito da una rotazione attorno all’asse di abdo-adduzione della spalla
(vedi Fig.4.7) si è decisiso di prendere tale angolo come fattore peso. Attraverso quindi
dei filtri binari si sono costruiti dei pesi normalizzati (vedi Fig.4.9) che sono stati applicati
alle tre calibrazioni per poi sommarne il risultato, ottendo una calibrazione singola pesata
per ogni punto anatomico.
Figura 4.7 Angolo di abdo-adduzione della spalla utilizzato come fattore peso nella calibrazione del primo
gesto motorio in esame
Nel secondo gesto, MOV2, il principio utilizzato è stato pressochè lo stesso. Essendo il
gesto caratterizzato prima da un’estensione e poi una flessione del gomito, come peso si è
utilizzato in questo caso l’angolo di flesso-estensione del gomito (vedi Fig.4.8).

Capitolo 4: Materiali e metodi
57
Figura 4.8 Angolo di flesso-estensione del gomito utilizzato come fattore peso nella calibrazione del
secondo gesto motorio preso in esame
Come per il primo gesto motorio analizzato, l’angolo utilizzato come peso è stato
normalizzato L’unica differenza sta nel fatto che essendo il gesto abbastanza limitato, si è
pensato fossero sufficienti solo due pose statiche per la calibrazione. Anziché avere
quindi tre pesi come nel caso precedente, in tale prova si sono ricavate due curve peso
(vedi Fig.4.9).
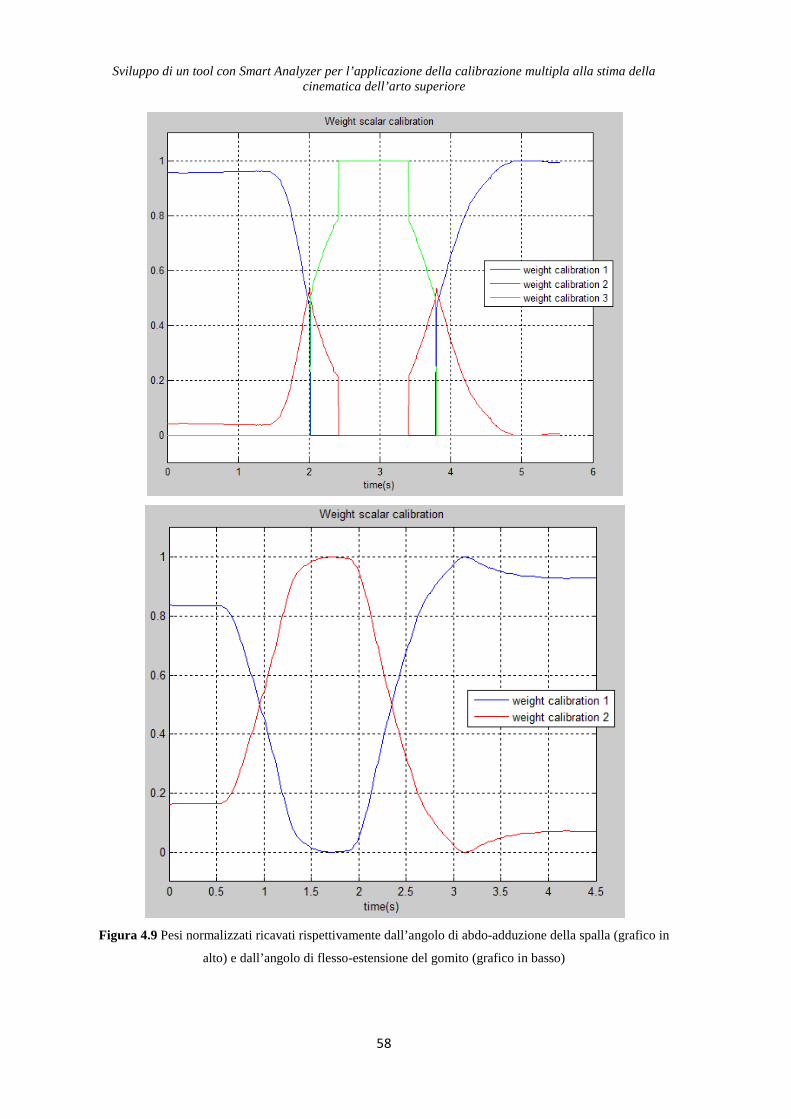
Sviluppo di un tool con Smart Analyzer per l’applicazione della calibrazione multipla alla stima della cinematica dell’arto superiore
58
Figura 4.9 Pesi normalizzati ricavati rispettivamente dall’angolo di abdo-adduzione della spalla (grafico in
alto) e dall’angolo di flesso-estensione del gomito (grafico in basso)

Capitolo 5
Risultati 5.1 Introduzione
Nel capitolo precedente si è visto come sono state svolte le prove per l’analisi cinematica
dei due gesti motori presi in esame, o meglio si sono distinti tre tipi diversi di
calibrazione:
1) CAST calibrazione singola ( vedi Cap. 3.1)
2) CAST calibrazione multipla con fattore peso tempo
3) CAST calibrazione multipla con fattore peso angolo
Con i dati relativi ad ognuna delle tre calibrazioni sono stati ricostruiti i sistemi di
riferimento anatomici di ogni segmento corporeo e quindi calcolati, attraverso opportune
sequenze di Eulero, gli angoli di rotazione delle articolazioni di spalla, gomito e dell’
articolazione sternoclaveare (vedi Cap.4.2.2). Nella valutazione dei risultati, le traiettorie
dei punti calibrati e gli angoli delle articolazioni per le tre calibrazioni sono stati messi a
confronto per verificare la bontà dei diversi metodi utilizzati e discutere sulle eventuali
differenze presenti. Per quanto riguarda la calibrazione con il fattore peso tempo, tutti i
dati relativi ad essa vanno da un frame iniziale a circa il 50% del gesto che si vuole
analizzare. Questo accade perché come peso è stato utilizzato una retta che nel tempo
passava da valore zero a valore uno, non tenendo conto della seconda metà della prova in
cui si il braccio viene riportato nella sua posizione di partenza. Nelle altre due
calibrazioni, invece, i dati rappresentano il 100% del gesto motorio in esame.
5.2 Valutazione sperimentale della cinematica
Essendo noto che la valutazione degli angoli articolari è soltanto una conseguenza alla
valutazione della calibrazione dei punti anatomici, sembra logico analizzare inizialmente
le traiettorie dei punti calibrati nelle tre differenti calibrazioni. I punti che vengono
solitamente calibrati nell’analisi cinematica dell’arto superiore, perché maggiormente
affetti da artefatti ATM, sono i due processi stiloidei di ulna e radio (RUS,RRS), i due
epicondili del gomito (REM,REL) e l’acromion (RA) relativo all’arto in movimento.

Sviluppo di un tool con Smart Analyzer per l’applicazione della calibrazione multipla alla stima della cinematica dell’arto superiore
60
5.2.1 Traiettorie dei punti calibrati (MOV1)
A seguire sono riportati tutti i grafici relativi alle traiettorie, nello spazio, dei punti
calibrati precedentemente accennati. Per ogni grafico sono riportate tre curve, relative alle
tre differenti metodologie di calibrazione: le curve blu rappresentano le traiettorie
ottenute con la calibrazione singola, ovvero con la ricostruzione dei punti calibrati
attraverso un’unica prova statica definita dalla “posizione anatomica”; le curve verdi sono
quelle relative ai punti ottenuti con doppia calibrazione utilizzando il tempo come fattore
peso; le curve rosse, infine, sono le traiettorie derivanti sempre da una doppia
calibrazione ma utilizzando l’angolo di abdo-adduzione della spalla. Per semplicità
conviene identificare le posizioni in riferimento alla percentuale del gesto compiuto
dall’arto superiore:
- posizione iniziale (0% ): braccio disteso lungo il fianco
- posizione intemedia (50%): braccio alzato lateralmente a formare un angolo di
circa 90° con il tronco
- posizione finale (100%): braccio disteso lungo il corpo (uguale alla posizione
iniziale)
I grafici presentano sull’asse delle ascisse la percentuale del ciclo che caratterizza il gesto
motorio mentre sull’asse delle ordinate, la distanza dei punti calibrati rispetto al sistema
di riferimento globale del laboratorio, espressa in metri. Osservando i grafici che seguono
si può notare come le tre calibrazioni portano a dei risultati molto simili, per non dire
uguali nel caso dei due epicondili (vedi Fig.5.1) e dei processi stiloidei (vedi Fig 5.2).
Risulta invece interessante la valutazione dei grafici relativi alle traiettorie dell’acromion
RA (Fig. 5.3). Si può, infatti, notare che se nella parte iniziale e finale del gesto (0% e
100%) le calibrazioni portano ad uno stesso risultato; nella parte intermedia (50%), la
calibrazione singola tende a sottostimare il movimento di RA in tutte e tre le direzioni.
L’errore maggiore viene compiuto lungo l’asse y verticale, dove si presenta una
differenza di circa 5 cm. Altra cosa che si può dire guardando il grafico è che la
calibrazione pesata con il fattore tempo, com’era presumibile, tende a linearizzare
l’andamento dei punti calibrati, sovrastimando quelle che sono le traiettorie tra lo 0% ed
il 50% del ciclo.

Capitolo 5: Risultati
61
Figura 5.1 Traiettorie lungo i tre assi (x,y,z) dell’epicondilo mediale REM e di quello laterale REL
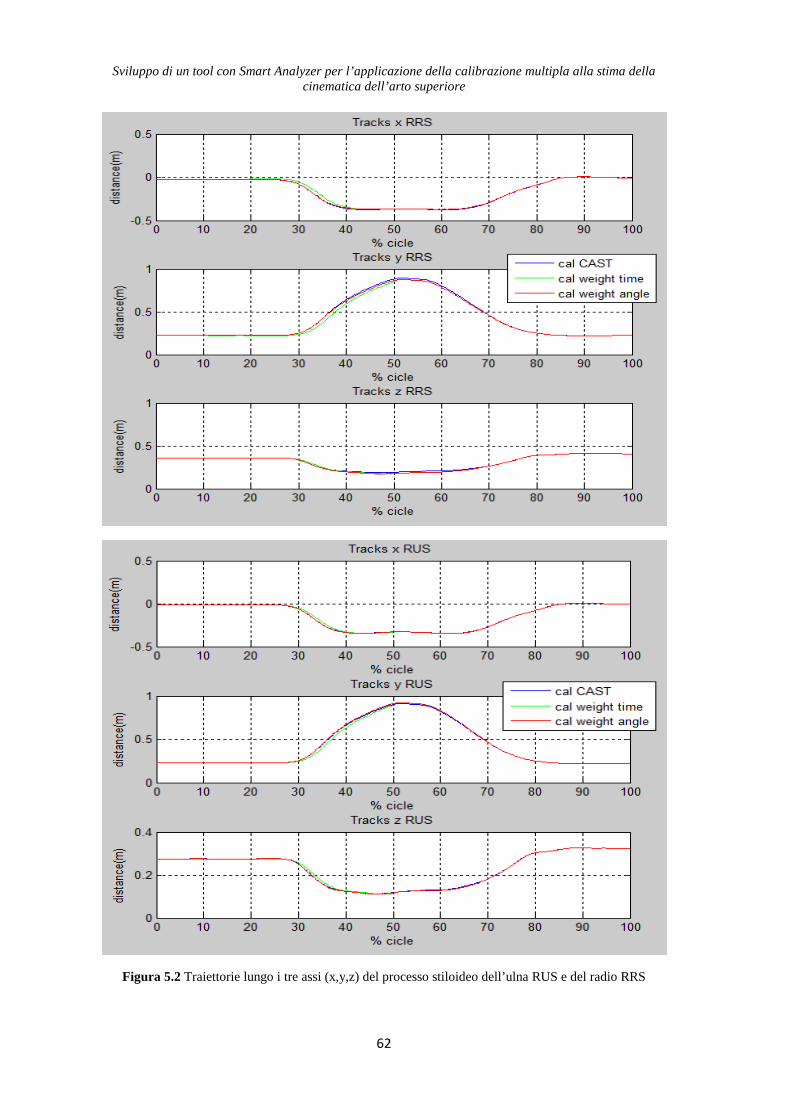
Sviluppo di un tool con Smart Analyzer per l’applicazione della calibrazione multipla alla stima della cinematica dell’arto superiore
62
Figura 5.2 Traiettorie lungo i tre assi (x,y,z) del processo stiloideo dell’ulna RUS e del radio RRS
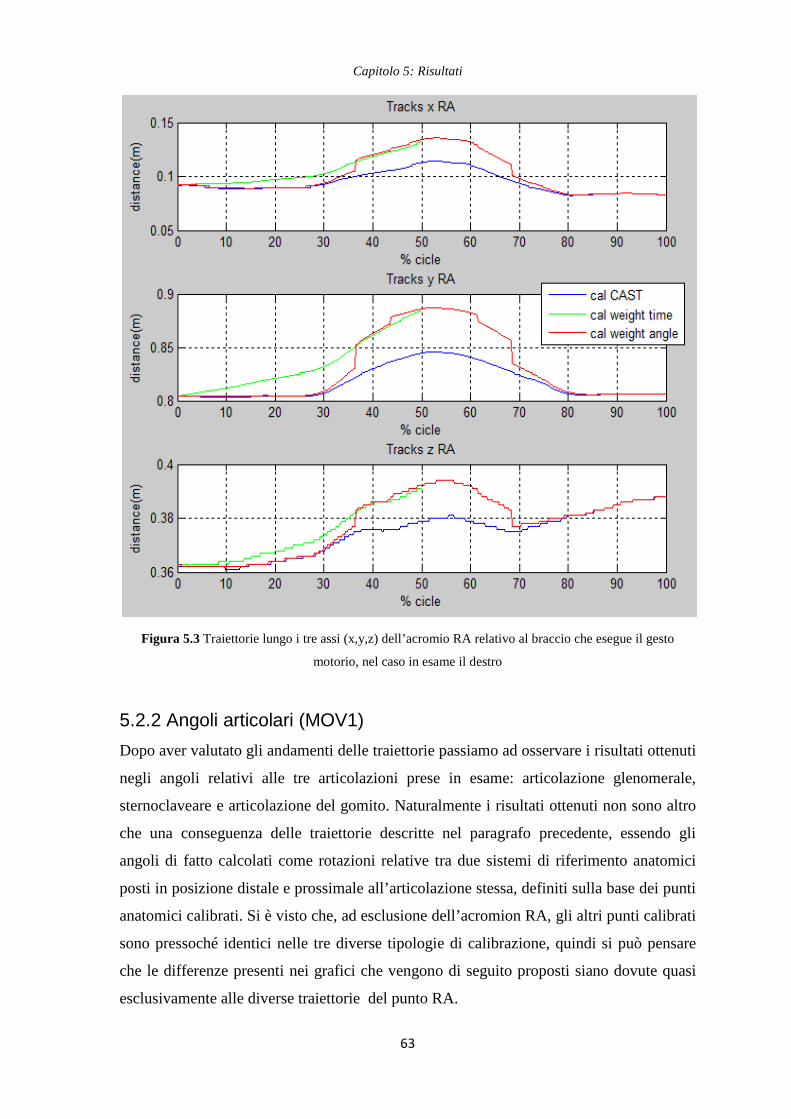
Capitolo 5: Risultati
63
Figura 5.3 Traiettorie lungo i tre assi (x,y,z) dell’acromio RA relativo al braccio che esegue il gesto
motorio, nel caso in esame il destro
5.2.2 Angoli articolari (MOV1)
Dopo aver valutato gli andamenti delle traiettorie passiamo ad osservare i risultati ottenuti
negli angoli relativi alle tre articolazioni prese in esame: articolazione glenomerale,
sternoclaveare e articolazione del gomito. Naturalmente i risultati ottenuti non sono altro
che una conseguenza delle traiettorie descritte nel paragrafo precedente, essendo gli
angoli di fatto calcolati come rotazioni relative tra due sistemi di riferimento anatomici
posti in posizione distale e prossimale all’articolazione stessa, definiti sulla base dei punti
anatomici calibrati. Si è visto che, ad esclusione dell’acromion RA, gli altri punti calibrati
sono pressoché identici nelle tre diverse tipologie di calibrazione, quindi si può pensare
che le differenze presenti nei grafici che vengono di seguito proposti siano dovute quasi
esclusivamente alle diverse traiettorie del punto RA.
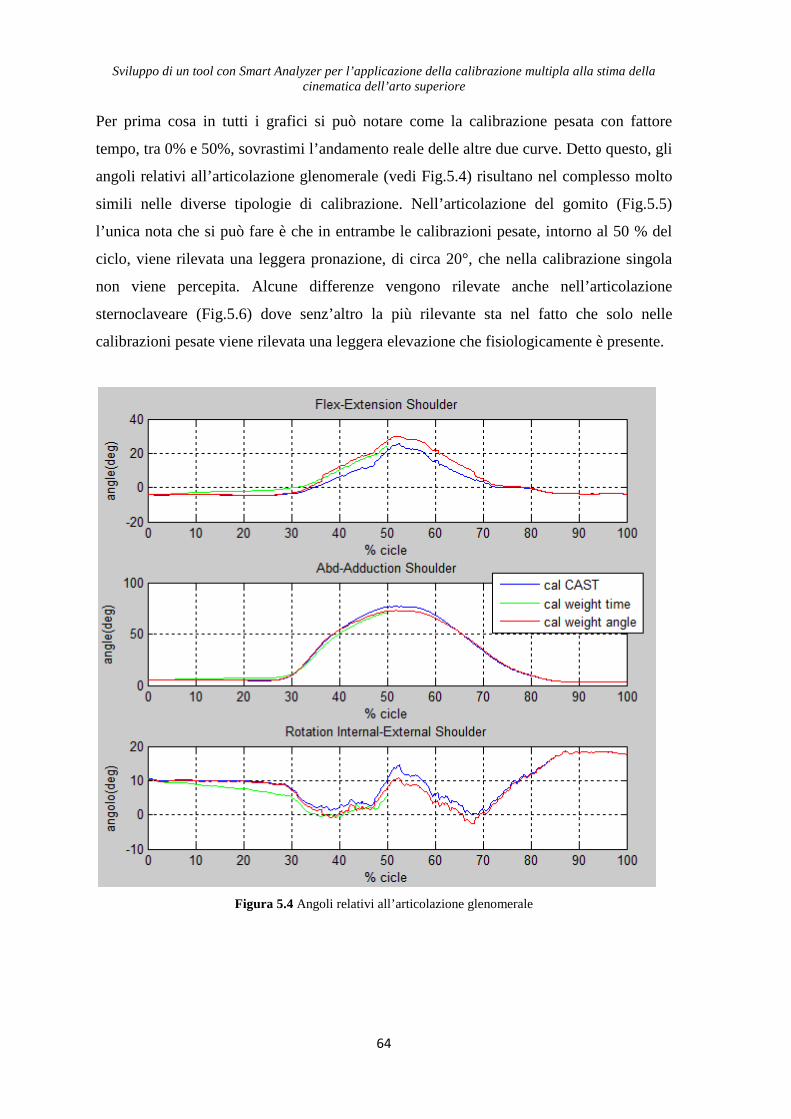
Sviluppo di un tool con Smart Analyzer per l’applicazione della calibrazione multipla alla stima della cinematica dell’arto superiore
64
Per prima cosa in tutti i grafici si può notare come la calibrazione pesata con fattore
tempo, tra 0% e 50%, sovrastimi l’andamento reale delle altre due curve. Detto questo, gli
angoli relativi all’articolazione glenomerale (vedi Fig.5.4) risultano nel complesso molto
simili nelle diverse tipologie di calibrazione. Nell’articolazione del gomito (Fig.5.5)
l’unica nota che si può fare è che in entrambe le calibrazioni pesate, intorno al 50 % del
ciclo, viene rilevata una leggera pronazione, di circa 20°, che nella calibrazione singola
non viene percepita. Alcune differenze vengono rilevate anche nell’articolazione
sternoclaveare (Fig.5.6) dove senz’altro la più rilevante sta nel fatto che solo nelle
calibrazioni pesate viene rilevata una leggera elevazione che fisiologicamente è presente.
Figura 5.4 Angoli relativi all’articolazione glenomerale

Capitolo 5: Risultati
65
Figura 5.5 Angoli relativi all’articolazione del gomito
Figura 5.6 Angoli relativi all’articolazione sternoclaveare

Sviluppo di un tool con Smart Analyzer per l’applicazione della calibrazione multipla alla stima della cinematica dell’arto superiore
66
5.2.3 Traiettorie dei punti calibrati (MOV2)
Il secondo gesto motorio analizzato è una estensione del gomito partendo dalla posizione
di gomito flesso in pronazione. Come nel paragrafo 5.2.1 vengono riportati tutti i grafici
relativi alle traiettorie, nello spazio, dei punti calibrati e per ogni grafico sono riportate
sempre le tre solite curve, relative alle tre differenti metodologie di calibrazione. Vengono
quindi identificate le diverse posizioni come segue:
- posizione iniziale (0%): avambraccio sul piano trasversale con gomito flesso in
pronazione
- posizione intemedia (50%):braccio sul piano trasversale con estensione del gomito
- posizione finale (100%): uguale alla posizione iniziale
I grafici presentano sull’asse delle ascisse la percentuale del ciclo che caratterizza il gesto
analizzato e sull’asse delle ordinate la distanza dei punti calibrati rispetto al sistema di
riferimento globale del laboratorio, espressa in metri. Come si può notare, è sempre per
l’acromion RA che si distinguono le maggiori differenze (vedi Fig.5.7). Questo avviene
perché per la calibrazione singola, la prova statica di rilevazione dei markers anatomici
rispetto ai cluster avviene nella “posizione anatomica di riferimento” (braccio in
estensione lungo il tronco), indipendentemente dall’esercizio fisico che si vuole
analizzare. Nell’esercizio in questione (MOV2), la configurazione iniziale è molto
differente dalla “posizione anatomica” e questo si ripercuote sulla ricostruzione dei punti
calibrati. Per quanto riguarda RA, le traiettorie che risentono maggiormente di tale
problema sono quelle relative al movimento lungo l’asse x e l’asse y, dove la differenza
tra calibrazione singola e le calibrazioni multiple pesate rimane più o meno costante
intorno a 2-2.5 cm. Per gli altri punti calibrati le traiettorie risultano più o meno uguali,
indifferentemente dalla calibrazione utilizzata (Fig.5.8-5.9-5.10-5.11).
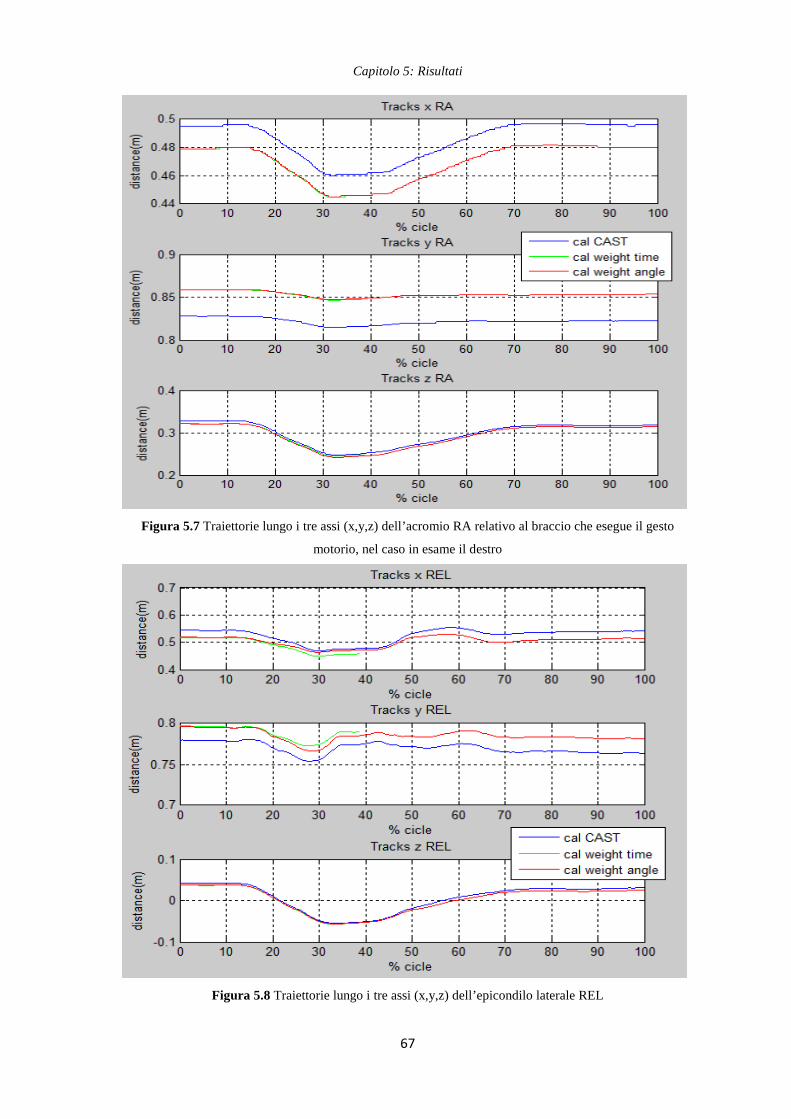
Capitolo 5: Risultati
67
Figura 5.7 Traiettorie lungo i tre assi (x,y,z) dell’acromio RA relativo al braccio che esegue il gesto
motorio, nel caso in esame il destro
Figura 5.8 Traiettorie lungo i tre assi (x,y,z) dell’epicondilo laterale REL

Sviluppo di un tool con Smart Analyzer per l’applicazione della calibrazione multipla alla stima della cinematica dell’arto superiore
68
Figura 5.9 Traiettorie lungo i tre assi (x,y,z) dell’epicondilo mediale REM
Figura 5.10 Traiettorie lungo i tre assi (x,y,z) del processo stiloideo del radio RRS

Capitolo 5: Risultati
69
Figura 5.11 Traiettorie lungo i tre assi (x,y,z) del processo stiloideo dell’ulna RUS e del radio RRS
5.2.4 Angoli articolari (MOV2)
Anche per il secondo movimento analizziamo la variazione degli angoli che
caratterizzano le articolazioni. Entrando nell’analisi specifica dei dati, si può notare che
nell’articolazione glenomerale (vedi Fig. 5.12) è presente una moderata differenza nel
grafico relativo alla sua rotazione interna ed esterna. Innanzitutto l’articolazione, in
posizione iniziale, nella calibrazione pesata con angolo è maggiormente intra-ruotata
rispetto alla calibrazione singola; inoltre la calibrazione con angolo rileva un rotazione
esterna della spalla nella fase intermedia del ciclo (20-50%) che nella singola non è così
accentuata. Un altra osservazione che possiamo fare, è che nelle rotazioni angolari
ottenute con la calibrazione singola, la differenza è massima rispetto alla calibrazione
pesata con angolo, all’inizio e alla fine del ciclo. La differenza tra le curve è invece
minima nella fase intermedia tra il 30-50% quando il braccio è in estensione; questo
avviene non a caso, infatti, tale posizione risulta essere molto più vicina alla
configurazione anatomica di riferimento rispetto alla posizione di inizio e fine del gesto
analizzato.
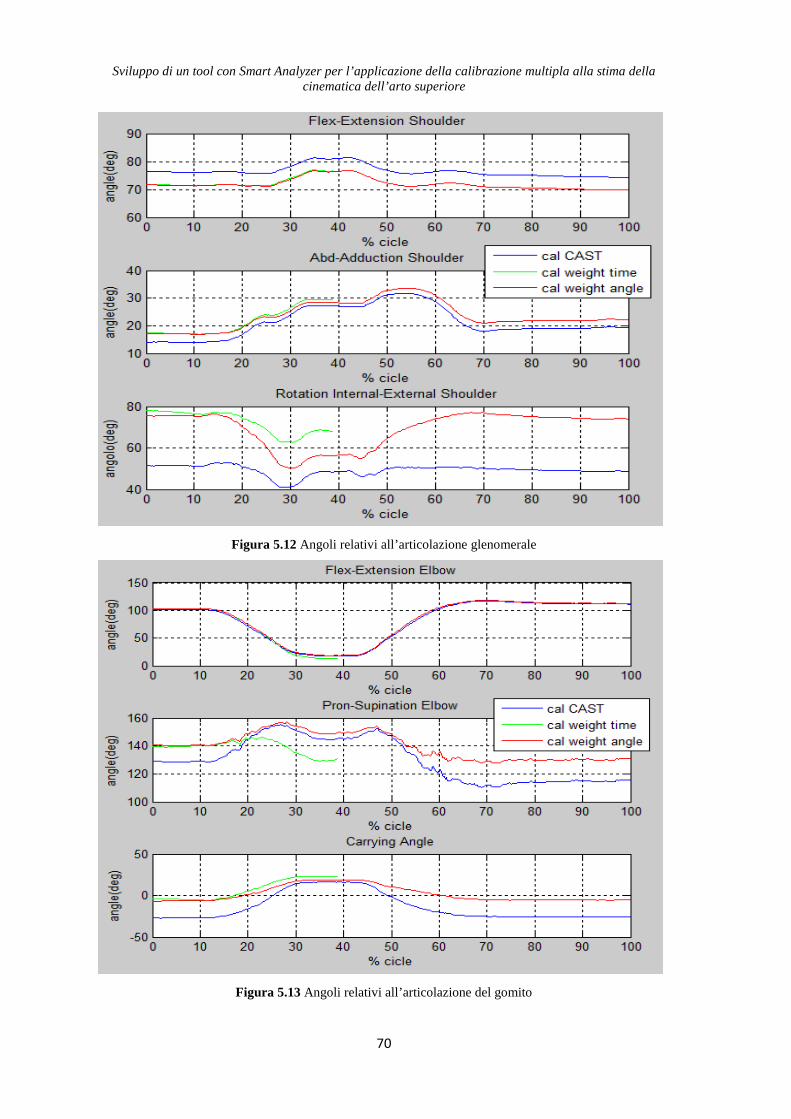
Sviluppo di un tool con Smart Analyzer per l’applicazione della calibrazione multipla alla stima della cinematica dell’arto superiore
70
Figura 5.12 Angoli relativi all’articolazione glenomerale
Figura 5.13 Angoli relativi all’articolazione del gomito

Capitolo 5: Risultati
71
Per quanto riguarda l’articolazione del gomito (Fig.5.13) non sono emerse particolari
differenze, se non il solito fatto che le curve tendono ad avvicinarsi quando il braccio è in
estensione (25-45%). Nell’articolazione sternoclaveare (Fig.5.14), invece, le calibrazioni
multiple pesate rispetto a quella singola, posizionano il cingolo scapolare in leggera
protrazione e depressione; quest’ultima, soltanto nella calibrazione con fattore peso
angolo, tra il 20 e il 50% aumenta di circa 4° mentre nelle altre due calibrazione tende a
rimanere costante.
Figura 5.14 Angoli relativi all’articolazione sternoclaveare

Sviluppo di un tool con Smart Analyzer per l’applicazione della calibrazione multipla alla stima della cinematica dell’arto superiore
72

Discussione finale A conclusione di questo lavoro si possono fare diverse osservazioni a riguardo dell’analisi
cinematica dell’arto superiore e ai metodi di calibrazione utilizzati. Come prima cosa
bisogna chiarire il fatto che la scelta di utilizzare un applicativo come Smart Analyzer
per lo sviluppo del tool in questione non è banale. L’utilizzo per esempio di altri
applicativi, per esempio Matlab, avrebbe ristretto il campo degli utilizzatori finali; il
linguaggio intuitivo che caratterizza Smart Analyzer permette anche a clinici, medici e
non solo agli ingegneri di interfacciarsi al protocollo creato. Quello che è emerso dai dati
grezzi riportati nei grafici del capitolo precedente, è che la calibrazione con fattore tempo
rispetto a quella con peso angolare presenta senz’altro come limite il fatto di poter
calibrare soltanto gesti non ciclici; inoltre il fatto di linearizzare il movimento tra la parte
iniziale e finale può, come abbiamo visto, porta a delle sovra/sotto stime degli andamenti
effettivi dei punti ricostruiti. Per quanto riguarda la calibrazione singola, nel complesso è
un buon approccio. Tuttavia nella calibrazione dell’acromion, quando il gesto motorio si
allontana di molto dalla “posizione anatomica” si vengono a creare delle incongruenze
rispetto a quello che dovrebbe essere il movimento fisiologico della spalla; questo
provoca calibrazioni errate e di conseguenza anche angoli di rotazione del cingolo
scapolare diversi da quelli ottenuti con le calibrazioni pesate che dovrebbero meglio
rappresentare la realtà. Bisogna quindi valutare bene, a seconda del movimento che si
vuole analizzare, se è sufficiente utilizzare la calibrazione singola o un metodo più
complesso, come può essere quello della calibrazione multipla con fattore peso angolo.
Naturalmente i grafici ottenuti sono una buona base per fare delle considerazioni tra i
diversi metodi utilizzati per la calibrazione e la ricostruzione degli angoli articolari, ma
manca sicuramente un “gold standard” di riferimento rispetto al quale valutare quale dei
metodi utilizzati sia il migliore. Una soluzione per effettuare la validazione del tool
potrebbe essere quella di affiancare alle tre calibrazioni effettuate, una prova in
fluoroscopia così da capire se, come in effetti dovrebbe essere, la calibrazione multipla
approssima i movimenti reali in modo migliore rispetto alle altre. Tutte le prove a cui
sono riferiti i dati, sono ottenute dal’esame di un solo soggetto, risulta quindi necessario
estendere questo lavoro ad un campione più ampio, in modo da aumentarne la sua valenza
statistica.

Sviluppo di un tool con Smart Analyzer per l’applicazione della calibrazione multipla alla stima della cinematica dell’arto superiore
74

Bibliografia 1. Wu, G., van der Helm, F.C., Veeger, H.E., Makhsous, M., Van, R.P., Anglin, C.,
Nagels, J. Karduna, A.R., McQuade, K., Wang, X., Werner, F.W., Buchholz, B.,
2005. ISB recommendation on definitions of joint coordinate systems of various
joints for the reporting of human joint motion–Part II: shoulder, elbow, wrist and
hand. J.Biomech. 38 (5), 981–992.
2. Cutti, Veeger, G.R. Johnson, 2009. A framework for the definition of standardized
protocols for measuring upper-extremity kinematics. Clinical Biomechanics 24,
246-253.
3. Cutti, Cappello, Davalli, 2006. In vivo validation of a new technique that
compensates for soft tissue artefact in the upper-arm. Clinical Biomechanics 21,
S13-S19.
4. Cutti, Paolini, Trancossi, Cappello, Davalli, 2005. Soft tissue artefact assessment
in humeral axial rotation. Gait and Posture 21, 341-349.
5. Garofalo,A.G. Cutti, Filippi, Cavazza, Ferrari, Cappello, Davalli, 2009. Inter-
operator reliability and prediction bands of a novel protocol to measure the
coordinated movements of shoulder-girdle and humerus in clinical settings. Med.
Biol. Eng. Comput. 47, 475-486.
6. Van der Helm, 2000. A standardized protocol for motion recordings of the
shoulder motions. www.wbmt.tudelft.nl/mms/dsg/intersg/ISGProposal.pdf.
7. Murray IA, 1999. Determining upper limb kinematics and dynamic during
everyday tasks. PhD Thesis. University of Newcastle upon Tyne.
8. Cappozzo, Catani, Della Croce, Leardini, 1995. Position and orientation in space
of bones during movement: anatomical frame definition and determination.
Clinical Biomechanics 10, 171-178.
9. Cappozzo, Cappello, Della Croce, 1997. Surface- marker cluster design criteria
for 3D bone movement reconstruction. IEEE Transaction on Biomedical
Engineering vol. 44, no.10.
10. Ceccon, Ceseracciu, Sawacha, Gatta, Cortesi, Cobelli, Fantozzi, 2013.Motion
analysis of front crawl swimming applying CAST technique by means of
automatic tracking. Journal of Sport Sciences 31(3):276-87

Sviluppo di un tool con Smart Analyzer per l’applicazione della calibrazione multipla alla stima della cinematica dell’arto superiore
76
11. Lucchetti, Cappozzo, Cappello, Della Croce, 1998. Skin movement artefact
assessment and compensation int the estimation of knee-joint kinematics. Journal
of Biomechanics. 31, 977-984.
12. Cappello A.,2005. Soft tissue artifact compensation in knee kinematics by double
anatomical landmark calibration: performance of a novel method during selected
motor tasks. IEEE Transaction on Biomedical Engineering vol. 52, no. 6.
13. Cappello, Cappozzo, La Palombara, Lucchetti, Leardini, 1997. Multiple
anatomical Landmark calibration for optimal bone pose estimation. Human
Movement Sciences 16, 259-274.
14. Tommaso Leo, 1994. AIM Project A2002: CAMARC-II (computer aided
movement analysis in a rehabilitation context-II). Computer Methods and
Program in Biomedicine 45, 11-13.
15. L.Tersi, S. Fantozzi, R. Stagni, 2009. 3D Elbow Kinematics with Monoplanar
Fluoroscopy: In silico Evaluation, EURASIP Journal on Advances in Signal
Processing volume 2010, Article ID 142989.
16. Cappello, Cappozzo, Di Prampero, 2003. Bioingegneria della postura e del
movimento, Pàtron editore.
17. Palastanga N., Field, Soames, 2007. Anatomia del movimento umano, Elsevier
editore.
18. Kapandji, 2002. Fisiologia articolare, vol. 1- Arto superiore, Monduzzi editore.
19. Platzer Werner, 2007. Anatomia umana- Apparato locomotore, atlante tascabile,
CEA editore.
20. http://www.btsbioengineering.com/it/

Ringraziamenti Alla fine di un lavoro come questo i ringraziamenti diventano un piacere personale e una
sezione alla quale non si può rinunciare. Ovviamente colgo l’occasione per ringraziare
anche tutti coloro che hanno lasciato nella mia vita un segno della loro presenza. In primo
luogo voglio ringraziare i miei genitori Giancarla e Pierluigi, per essermi sempre stati
vicini, con discrezione, in ogni aspetto della mia vita, per avermi dato la possibilità di
continuare gli studi e per tutto ciò che non si può esprimere a parole. Ringrazio Federica
per essere, ormai da dieci anni, un punto fermo della mia vita e per riuscire a trasmettermi
ogni giorno nuove emozioni. Se ho raggiunto questo traguardo lo devo anche alla sua
continua presenza, per avermi fatto capire che potevo farcela, incoraggiandomi a non
mollare mai. Grazie alle mie nonne, Maria e Giannina, per i loro numerosi consigli di vita
che mi hanno aiutato a crescere. Grazie a mia sorella Naima e a Massimiliano, perché non
danno mai per scontato il bene che voglio loro e per essere sempre pronti a darmi una
mano quando ne ho bisogno. Grazie a Thomas che ogni giorno riesce a regalarmi un
sorriso. Grazie a Gigi, Matteo e Riccardo per essermi amici sempre e comunque.
Desidero ringraziare tutti gli amici dell’università, in particolar modo Matteo, Laura,
Jessica e Elena, con cui ho iniziato e trascorso i miei studi, con cui ho scambiato qualche
pensiero, qualche idea, qualche risata all’interno del dipartimento. Doverosi
ringraziamenti a chi mi ha permesso di sperimentare il mio lavoro, ovvero BTS
Bioengineering, dove ho trovato la serenità necessaria durante tutto il periodo di stage,
grazie alla cordialità e disponibilità delle persone con cui ho collaborato o semplicemente
conosciuto. In modo particolare desidero ringraziare il mio tutor aziendale Diego Crovato
per avermi costantemente seguito e fatto conoscere più da vicino quella che è l’analisi del
movimento. In ultimo, ma non di importanza, voglio ringraziare sentitamente il mio
relatore, il Professor Claudio Cobelli, per la fiducia dimostratami nell’aver accettato
questo argomento di tesi ed il mio correlatore, Ing. Zimi Sawacha, per avermi seguito
durante lo svolgimento del lavoro con consigli e confronti che mi hanno aiutato ad
intraprendere, ogni volta, le scelte più appropriate. Se ho scordato qualcuno, sappia che
manca in questo elenco ma non nel mio cuore.







