Cristian Secchi Pag. 1 Ing. Cristian Secchi Tel. 0522 522234 e-mail: [email protected]http://www.dismi.unimore.it/Members/csecchi CONTROLLO ROBOT INDUSTRIALI Laurea Specialistica in Ingegneria Meccatronica CONTROLLO DI ROBOT INDUSTRIALI OSSERVABILITA’ E RICOSTRUIBILITA’ Osservabilità e Ricostruibilità-- 2 Cristian Secchi Osservabilità e ricostruibilità • E’ uno dei problemi fondamentali della teoria dei sistemi • Mentre l’analisi di raggiungibilità e controllabilità mette in luce il ruolo dell’ingresso u(·), l’analisi di osservabilità e ricostruibilità mette in luce il ruolo dell’uscita y(·) nella stima dello stato del sistema. • Sono concetti legati alla possibilità di osservare l’evoluzione dello stato del sistema tramite l’uscita e, quindi, alla possibilità di stimare lo stato del sistema. • Sono concetti legati alla possibilità di controllare il sistema mediante la retroazione dell’uscita, sempre disponibile, anziché mediante la retroazione dello stato, non sempre disponibile.
CONTROLLO ROBOT INDUSTRIALI Laurea Specialistica in Ingegneria Meccatronica
CONTROLLO DI ROBOT INDUSTRIALI OSSERVABILITA’ E RICOSTRUIBILITA’
Osservabilità e Ricostruibilità-- 2 Cristian Secchi
Osservabilità e ricostruibilità
• E’ uno dei problemi fondamentali della teoria dei sistemi • Mentre l’analisi di raggiungibilità e controllabilità mette in luce il
ruolo dell’ingresso u(·), l’analisi di osservabilità e ricostruibilità mette in luce il ruolo dell’uscita y(·) nella stima dello stato del sistema.
• Sono concetti legati alla possibilità di osservare l’evoluzione dello
stato del sistema tramite l’uscita e, quindi, alla possibilità di stimare lo stato del sistema.
• Sono concetti legati alla possibilità di controllare il sistema mediante la retroazione dell’uscita, sempre disponibile, anziché mediante la retroazione dello stato, non sempre disponibile.
Cristian Secchi Pag. 2
Osservabilità e Ricostruibilità-- 3
La retroazione dello stato?
• Nella realtà il segnale che è a disposizione è l’uscita e NON lo stato. L’uscita contiene solo l’immagine dello stato tramite la matrice C che solitamente non ha rango pari alla dimensione di A.
• E’ possibile ricavare dalla sola uscita informazioni circa l’evoluzione dell’intero stato?
( )⎪⎪
⎩
⎪⎪
⎨
⎧
=
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
+⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
=
)(001)(
)(101
)(22102-0001-
)(
txty
tutxtx
Esempio
0)(121
)0( =⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
= tux
Osservabilità e Ricostruibilità-- 4
La retroazione dello stato?
• La sola uscita del sistema NON è un buon indicatore del comportamento dello stato
• Occorre stimare l’evoluzione della variabile di stato utilizzando altre
informazioni disponibili oltre all’ uscita
y(t) x(t)
Cristian Secchi Pag. 3
Osservabilità e Ricostruibilità-- 5
Osservabilità e ricostruibilità
• Mentre l’analisi di raggiungibilità e controllabilità mette in luce il
ruolo dell’ingresso u(·), l’analisi di osservabilità e ricostruibilità mette in luce il ruolo dell’uscita y(·) e del modello del sistema nella stima dello stato.
• Sono concetti legati alla possibilità di osservare l’evoluzione dello
stato del sistema tramite l’uscita e, quindi, alla possibilità di stimare lo stato del sistema.
Osservabilità e Ricostruibilità-- 6 Cristian Secchi
Osservabilità e ricostruibilità
Il problema dell’osservabilità consiste nel determinare lo stato iniziale x(t0) mediante osservazioni degli ingressi u(t) e delle uscite y(t) del sistema considerato per t >t0
Il problema della ricostruibilità consiste nel determinare lo stato finale x(t1) mediante osservazioni degli ingressi u(t) e delle uscite y(t) del sistema considerato per t<t1
Cristian Secchi Pag. 4
Osservabilità e Ricostruibilità-- 7 Cristian Secchi
Osservabilità e ricostruibilità
Un concetto fondamentale per lo sviluppo dell’analisi dell’osservabilità e della ricostruibilità è quello dell’indistinguibilità tra stati:
Definizione [stati indistinguibili nel futuro]: Due stati x1 e x2 sono indistinguibili nel futuro nell’intervallo [t0,t1] (o, in altre parole, appartengono alla stessa classe di indistinguibilità nel futuro) se per tutte le funzioni di ingresso u(·) ∈ Ω si ha:
Due stati sono indistinguibili nel futuro quando non c’è la possibilità di differenziare le due uscite operando sull’ingresso in tutti i modi possibili.
Osservabilità e Ricostruibilità-- 8 Cristian Secchi
Osservabilità e ricostruibilità
L’analisi di osservabilità e ricostruibilità verrà specializzata per la classe dei sistemi LTI. Siccome sia il problema dell’osservabilità che quello della ricostruibilità consistono nella determinazione dello stato dall’uscita, non si perde di generalità nel considerare sistemi LTI puramente dinamici, cioè caratterizzati da:
Infatti il contenuto informativo sullo stato contenuto nell’uscita è lo stesso sia nel caso in cui y=Cx che nel caso y=Cx+Du. Il contributo relativo al termine Du agisce come un offset che non porta nessun ulteriore contributo informativo.
Cristian Secchi Pag. 5
Osservabilità e Ricostruibilità-- 9 Cristian Secchi
Osservabilità e ricostruibilità
Dato un sistema LTI generico, esso può essere sempre ricondotto a un sistema puramente dinamico considerando come uscita y’=y-Du:
E’ sempre possibile ricondursi alla forma puramente dinamica in quanto l’ingresso u(·), fissato dall’operatore, è sempre disponibile, al contrario dello stato x.
Pertanto i concetti illustrati per sistemi LTI puramente dinamici possono essere utilizzati anche per sistemi LTI generici.
D’ora innanzi, se non specificato diversamente, si considereranno sistemi puramente dinamici.
Osservabilità e Ricostruibilità-- 10
Osservabilità e ricostruibilità
Due stati x1 e x2 di un sistema puramente dinamico sono indistinguibili nel futuro nell’intervallo [0,t] se per tutte le funzioni di ingresso ammissibili u(·) ∈ Ω le funzioni di uscita coincidono su tale intervallo. Ovvero se:
[ ]tsdBuexeCdBuexeCs
sAAss
sAAs ,0)()(0
)(2
0
)(1 ∈∀⎟
⎟⎠
⎞⎜⎜⎝
⎛+=⎟
⎟⎠
⎞⎜⎜⎝
⎛+ ∫∫ −− ττττ ττ
[ ]tsxCexCe AsAs ,021 ∈∀=
La possibilità di distinguere due stati non dipende da come l’ingresso entra nel sistema ma solo dalla dinamica autonoma del sistema e dall’uscita
[ ]tsxxCeAs ,00)( 21 ∈∀=−
Cristian Secchi Pag. 6
Osservabilità e Ricostruibilità-- 11 Cristian Secchi
Osservabilità nei sistemi LTI
Pertanto, nei sistemi lineari, l’indistinguibilità nel futuro di due stati dipende solo dall’ uscita libera, cioè dalla componente dell’uscita relativa al movimento libero. Di conseguenza, l’indistinguibilità dipende unicamente dal movimento libero del sistema e non dal movimento forzato. La possibilità di stimare lo stato iniziale del sistema dall’uscita e dall’ingresso non dipende da come l’ingresso entra nel sistema ma solo dalla dinamica autonoma del sistema e dall’uscita.
Osservabilità e Ricostruibilità-- 12 Cristian Secchi
Osservabilità nei sistemi LTI
Dato un sistema LTI descritto da:
due stati x1 e x2 sono indistinguibili nell’intervallo [0,t] se e solo se
E’ impossibile capire, nell’intervallo [0,t], se il movimento libero è stato generato partendo da x1 o x2
Cristian Secchi Pag. 7
Osservabilità e Ricostruibilità-- 13
Osservabilità nei sistemi LTI
Uno stato x di un sistema LTI si dice non osservabile nell’intervallo [0,t], se è indistinguibile nel futuro dallo stato 0, cioè se:
[ ]tsxCeAs ,00 ∈∀=
• La proprietà di osservabilità, in quanto caso particolare del problema dell’indistinguibilità nel futuro, dipende unicamente dalla coppia di matrici (A,C) del sistema LTI in considerazione
• L’insieme degli stati non osservabili nell’intervallo [0,t] verrà indicato con E-(t).
• Utilizzando l’uscita e l’ingresso, non è possibile capire se un sistema si trova in uno stato non osservabile!
Osservabilità e Ricostruibilità-- 14 Cristian Secchi
Osservabilità nei sistemi LTI
Proposizione L’insieme degli stati non osservabili nell’intervallo [0,t] E-(t) di un sistema LTI è un sottospazio vettoriale dello spazio vettoriale degli stati X e, pertanto, d’ora in avanti verrà detto sottospazio di non osservabilità.
Analogamente a quanto visto per la raggiungibilità, per i sistemi LTI vale un importante risultato che consente di dare la struttura di spazio vettoriale all’insieme degli stati non osservabili. Tale struttura consente di calcolare in maniera agevole l’insieme degli stati non osservabili:
Cristian Secchi Pag. 8
Osservabilità e Ricostruibilità-- 15 Cristian Secchi
Osservabilità nei sistemi LTI
Definiamo la matrice di osservabilità come:
dove n è l’ordine della matrice di stato A.
Proposizione: Il sottospazio di non osservabilità relativo all’intervallo [0,t] E-(t) è, per ogni t>0, il kernel della matrice di osservabilità O -.
−− = OtE ker)(
Osservabilità e Ricostruibilità-- 16 Cristian Secchi
Osservabilità nei sistemi LTI
E’ pertanto possibile ottenere il sottospazio di non osservabilità semplicemente calcolando il kernel della matrice di osservabilità che può essere costruita a partire dall’equazione di stato del sistema LTI. Ovviamente nella matrice di osservabilità compaiono solo le matrici A e C.
Il sottospazio di non osservabilità non dipende da t, cioè la proprietà di osservabilità dei sistemi LTI non dipende dall’ampiezza dell’intervallo in cui si considera l’uscita. Pertanto, d’ora in avanti, si ometterà la dipendenza da t e si indicherà il sottospazio di non osservabilità con E-.
Cristian Secchi Pag. 9
Osservabilità e Ricostruibilità-- 17 Cristian Secchi
Osservabilità nei sistemi LTI
Il complemento ortogonale del sottospazio di non osservabilità è il sottospazio vettoriale degli stati distinguibili da 0 e, quindi, osservabili. Tale sottospazio è detto sottospazio di osservabilità.
Siccome E-=ker O- e siccome, dalle proprietà delle trasformazioni lineari, (kerO-)⊥=Im(O-)T, si ha che:
Osservabilità e Ricostruibilità-- 18 Cristian Secchi
Osservabilità nei sistemi LTI
Un sistema LTI si dice completamente osservabile se il sottospazio di non osservabilità coincide con lo stato nullo, cioè se:
Il fatto che un sistema LTI sia completamente osservabile significa che non vi sono stati indistinguibili dallo stato nullo e, come si vedrà in seguito, questo consente di poter usare l’uscita e l’ingresso per stimare lo stato del sistema.
o, equivalentemente, se il sottospazio di osservabilità coincide con l’intero spazio degli stati, cioè se:
Cristian Secchi Pag. 10
Osservabilità e Ricostruibilità-- 19
Osservabilità nei sistemi LTI
Che cosa implica la completa osservabilità in termini di indistinguibilità tra stati?
[ ]tsxxCeAs ,00)( 21 ∈∀=−
−∈− Exx )( 21
{ }0=−E
21 xx =
Se un sistema è completamente osservabile non esistono stati indistinguibili nel futuro
Osservabilità e Ricostruibilità-- 20 Cristian Secchi
Esempio
L1 L2
C
x1
x2 x3 u
y Le variabili di stato sono: x1 = corrente attraverso l’induttore L1 x2 = corrente attraverso l’induttore L2 x3= tensione ai capi del condensatore C L’ingresso u è la tensione ai morsetti e l’uscita è la corrente indicata in figura
Il circuito è un sistema LTI puramente dinamico descritto da:
Cristian Secchi Pag. 11
Osservabilità e Ricostruibilità-- 21 Cristian Secchi
Esempio
Per determinare il sottospazio di non osservabilità E- bisogna innanzitutto costruire la matrice di osservabilità O-. Siccome l’ordine della matrice A è n=3, O- sarà:
Utilizzando le matrici del sistema si ottiene:
il rango della matrice di osservabilità è 2: infatti la prima e la seconda colonna sono linearmente dipendenti mentre la terza è linearmente indipendente dalla prima e dalla seconda. Pertanto il kernel di O- avrà dimensione n-rank(O-)=1.
Osservabilità e Ricostruibilità-- 22 Cristian Secchi
Esempio
Calcoliamo una base del Kernel della matrice di osservabilità:
Si deve avere che:
Quindi
Cristian Secchi Pag. 12
Osservabilità e Ricostruibilità-- 23 Cristian Secchi
Esempio
Il sottospazio di osservabilità è il complemento ortogonale di E- e, pertanto, ed è dato dall’immagine di (O-)T:
Quindi:
Giustamente, la base di Eo- risulta ortogonale alla base di E-.
Alternativamente era possibile ottenere una base di Eo- sfruttando un
algoritmo per trovare il sottospazio ortogonale al sottospazio E-.
Osservabilità e Ricostruibilità-- 24 Cristian Secchi
Osservabilità nei sistemi LTI
Se uno stato x0=x(0) è osservabile, come è possibile, calcolarlo a partire dal modello del sistema, dalla funzione di ingresso e dalla funzione di uscita?
Consideriamo un sistema LTI descritto da:
dove la dimensione di A è n. Supponiamo che lo stato iniziale x0=x(0) sia osservabile e che la dimensione dello spazio di non osservabilità sia k, cioè dim E-=k.
Siccome Eo-=(E-)⊥, la dimensione del sottospazio di osservabilità è n-k.
Pertanto uno stato osservabile è individuato da n-k scalari che consentono di ottenerlo come combinazione lineare degli n-k vettori che costituiscono una base di Eo
-
Cristian Secchi Pag. 13
Osservabilità e Ricostruibilità-- 25 Cristian Secchi
Osservabilità nei sistemi LTI
L’uscita è data da:
lo stato iniziale compare solo nella componente libera dell’uscita. E’ possibile ottenere l’uscita libera tramite la seguente operazione, che è lecita in quanto l’ingresso u(¢) e il modello del sistema sono noti:
Siccome l’uscita è nota, lo sono anche le sue derivate. E’ quindi possibile ricavare le seguenti relazioni:
Osservabilità e Ricostruibilità-- 26 Cristian Secchi
Osservabilità nei sistemi LTI
Siccome dim E-=k e E-=kerO-, otteniamo n-k equazioni linearmente indipendenti nell’incognita x0 che, nota una base di Eo
-, ci consentono di calcolare gli n-k coefficienti tramite i quali x0 è combinazione lineare dei vettori di base di Eo
-, e, quindi, x0
Cristian Secchi Pag. 14
Osservabilità e Ricostruibilità-- 27 Cristian Secchi
Ricostruibilità nei sistemi LTI
Consideriamo il problema di determinare lo stato finale x(t) a partire dall’ingresso e dall’uscita nell’intervallo [0,t].
Il problema ammette un’unica soluzione se lo stato iniziale x0=x(0) è osservabile; infatti, siccome è possibile determinare in modo univoco lo stato iniziale utilizzando ingressi e uscite, in tal caso la soluzione, lo stato finale x(t), è data dalla semplice applicazione della formula di Lagrange:
Se lo stato iniziale x0=x(0) non è osservabile, utilizzando gli ingressi e le uscite non si ottiene univocamente lo stato x(0), ma un generico elemento dell’insieme x0+E-, cioè x0 sommato a un qualsiasi stato non osservabile.
Osservabilità e Ricostruibilità-- 28 Cristian Secchi
Ricostruibilità nei sistemi LTI
In tal caso, applicando la formula di Lagrange, si ottiene che l’insieme degli stati finali compatibili con la funzione di ingresso e la funzione di uscita nell’intervallo [0,t] è:
Se il sistema non è completamente osservabile, si ottiene un classe di stati finali compatibili con l’ingresso u(·) e l’uscita y(·). Due stati x1 e x2 appartenenti a questa classe si dicono indistinguibili nel passato nell’intervallo [0,t] :
Si noti che anche la proprietà di ricostruibilità, dipende solo dalle matrice A e C e dalle funzioni u(·) e y(·).
Cristian Secchi Pag. 15
Osservabilità e Ricostruibilità-- 29 Cristian Secchi
Ricostruibilità nei sistemi LTI
Definizione (stato non ricostruibile): Uno stato x di un sistema LTI si dice non ricostruibile nell’intervallo [0,t], se è indistinguibile nel passato dallo stato 0, cioè se:
L’insieme degli stati non ricostruibili eAtE- è indicato con E+(t).
Analogamente a quanto dimostrato per le proprietà di raggiungibilità e di controllabilità, è possibile dimostrare che:
Proposizione: In un sistema LTI l’insieme degli stati non ricostruibili E+ è un sottospazio vettoriale, detto sottospazio di non ricostruibilità, non dipende dall’ampiezza dell’intervallo preso in considerazione e coincide con il sottospazio di non osservabilità E-
Osservabilità e Ricostruibilità-- 30 Cristian Secchi
Ricostruibilità nei sistemi LTI
In generale il sottospazio di non osservabilità e quello di non ricostruibilità non coincidono. Il fatto che per sistemi LTI E+=E- è dovuto all’invertibilità della matrice di transizione dello stato eAt. Questa proprietà è molto forte e non è più verificata già per sistemi LTI discreti.
• Per i sistemi LTI, quindi, uno stato è non ricostruibile se e solo se esso non è osservabile.
• Il sottospazio di non ricostruibilità è il kernel della matrice di osservabilità
Cristian Secchi Pag. 16
Osservabilità e Ricostruibilità-- 31 Cristian Secchi
In Matlab esiste il comando obsv che, data la matrice di stato A e la matrice di uscita C, calcola la matrice di raggiungibilità O-
Siccome il sottospazio di osservabilità è dato dall’immagine di (O-)T, la dimensione d del sottospazio di osservabilità è dato dal rango di O-
>> d=rank(O);
Osservabilità e Ricostruibilità-- 32 Cristian Secchi
Sistemi equivalenti
Abbiamo visto che dato un sistema LTI descritto dalle matrici (A,B,C,D) e una matrice non singolare T, è possibile, tramite il cambio di variabile:
ottenere un sistema LTI equivalente descritto dalle matrici:
Tramite il cambio di variabile si ottengono due descrizioni equivalenti dello stesso sistema. Cosa succede alla proprietà di osservabilità (e, quindi, anche di ricostruibilità) nel cambio di rappresentazione?
Cristian Secchi Pag. 17
Osservabilità e Ricostruibilità-- 33 Cristian Secchi
Sistemi equivalenti
Sistemi LTI equivalenti hanno le stesse proprietà di osservabilità
Quindi, la proprietà di osservabilità è una proprietà intrinseca del sistema, cioè una proprietà indipendente dalla particolare rappresentazione. In particolare, se un sistema è completamente osservabile, tali sono tutte le sue rappresentazioni equivalenti.
In generale, si troveranno diverse espressioni della matrice di osservabilità e dei sottospazi di osservabilità per ciascuna rappresentazione equivalente del sistema. Ciò che è invariante in ogni rappresentazione equivalente è la dimensione del sottospazio di non osservabilità che esprime il tipo di regione dello spazio degli stati che è costituita da stati indistinguibili nel futuro dall’origine (retta, piano, iperpiano,…)
Osservabilità e Ricostruibilità-- 34 Cristian Secchi
Sistemi equivalenti
E’ possibile legare tra di loro le espressioni del sottospazio di non osservabilità e della matrice di osservabilità che si ottengono da due sistemi equivalenti. Siano
due rappresentazioni equivalenti di un sistema LTI puramente dinamico. Dalle espressioni delle matrici barrate in funzione della trasformazione T e delle matrici A,B e C si ottiene che le matrici di osservabilità sono legate da:
e
e i sottospazi di non osservabilità sono legati da
Cristian Secchi Pag. 18
Osservabilità e Ricostruibilità-- 35 Cristian Secchi
Dualità
Confrontando i risultati ottenuti finora sull’osservabilità e la ricostruibilità e quello ottenuti per la raggiungibilità e la controllabilità, si può mettere in evidenza una stretta analogia tra osservabilità e ricostruibilità da una parte e raggiungibilità e controllabilità dall’altra. Questa analogia è detta dualità e può essere individuata a livello generale ed è particolarmente semplice ed espressiva nel caso di sistemi LTI.
Dato un sistema LTI descritto da:
il sistema LTI SD descritto da:
viene detto sistema duale di S
Osservabilità e Ricostruibilità-- 36 Cristian Secchi
Dualità
• Il numero di ingressi di S è uguale al numero di uscite di SD • Il numero di uscite di S è uguale al numero di ingressi di SD
Proprietà: Le matrici di osservabilità e di raggiungibilità RD+ e OD
- di SD sono legate alle matrici R+ e O- di S dalle seguenti relazioni:
Cristian Secchi Pag. 19
Osservabilità e Ricostruibilità-- 37 Cristian Secchi
Dualità
Proprietà: Il sottospazio di osservabilità Eo- di S coincide con il
sottospazio di raggiungibilità di SD XD+ e il sottospazio di raggiungibilità X+
di S coincide con il sottospazio di osservabilità EoD- di SD.
Proprietà: Se due sistemi S e S’ sono algebricamente equivalenti, cioè se sono una rappresentazione dello stesso sistema in basi diverse nello spazio degli stati, anche i loro duali SD e SD’ sono algebricamente equivalenti.
Osservabilità e Ricostruibilità-- 38 Cristian Secchi
Dualità
E’ facile dimostrare che valgono le seguenti associazioni:
Dualità Dualità
T
T-T
Se i sistemi S e S’ sono legati tra di loro da x’=Tx, allora i rispettivi sistemi duali sono legati tra loro dalla relazione x’D=T-TxD
Questo mostra intuitivamente che la rappresentazione duale di un sistema non è semplicemente un modo di riscrivere le equazioni in una certa forma ma che essa è una proprietà intrinseca del sistema. Ogni sistema LTI ammette infinite coppie di rappresentazioni duali equivalenti.
Cristian Secchi Pag. 20
Osservabilità e Ricostruibilità-- 39 Cristian Secchi
Dualità
Il principio di dualità, soprattutto grazie alle relazioni che esistono tra sottospazi di raggiungibilità e sottospazi di osservabilità delle rappresentazioni duali, è molto utile perché permette di riportare molti problemi di osservabilità a problemi di raggiungibilità. In particolare, è possibile usare le tecniche sviluppate per la raggiungibilità (formula di Ackerman, lemma di Heymann) per risolvere problemi relativi all’osservabilità come ad esempio il problema della stima dello stato.
Osservabilità e Ricostruibilità-- 40 Cristian Secchi
Stima asintotica dello stato
Per risolvere il problema della regolazione è necessario disporre di una misura di tutte le variabili di stato. Questo, nella pratica, non è quasi mai verificato, specialmente per sistemi complessi, dotati di un gran numero di variabili di stato.
Ogni sistema è dotato di un certo numero di sensori che consentono di misurare solo alcune grandezze che possono corrispondere ad alcune variabili di stato o ad alcune combinazioni lineari delle variabili di stato. L’insieme delle grandezze misurate non è altro che l’uscita y(¢) del sistema.
Quindi, quello che è disponibile in pratica non è lo stato del sistema ma l’uscita del sistema, che non è sufficiente, in generale per risolvere il problema della regolazione.
Sfruttando la proprietà di osservabilità di un sistema LTI è possibile, tuttavia, costruire un dispositivo che riesca ad ottenere una stima dello stato del sistema a partire da misure sull’ingresso e sull’uscita.
Cristian Secchi Pag. 21
Osservabilità e Ricostruibilità-- 41 Cristian Secchi
Stima asintotica dello stato
Problema della stima asintotica dello stato: Dato un sistema S LTI puramente dinamico descritto dalle matrici (A,B,C), costruire un sistema, detto stimatore asintotico dello stato, che, disponendo solamente di misure dell’ingresso u(·) e dell’uscita y(·), fornisca una stima dello stato x del sistema S. Inoltre l’errore di stima deve annullarsi asintoticamente, cioè deve essere:
Lo stimatore asintotico dello stato, detto anche osservatore dello stato, parte da un errore iniziale di stima non nullo ma, se propriamente disegnato, dopo un certo intervallo di tempo l’errore di stima annulla e la stima dello stato si “aggancia” allo stato vero del sistema. L’intervallo di tempo che impiega l’errore di stima ad annullarsi dipende da come è stato costruito lo stimatore.
Osservabilità e Ricostruibilità-- 42 Cristian Secchi
Stimatore asintotico in catena aperta
La struttura dello stimatore asintotico in catena aperta non è altro che una “copia” delle equazioni dinamiche del sistema:
Stimatore asintotico in catena aperta
Sistema
u y x
Cristian Secchi Pag. 22
Osservabilità e Ricostruibilità-- 43 Cristian Secchi
Stimatore asintotico in catena aperta
Lo stimatore in catena aperta utilizza solamente l’ingresso u(¢) e il modello del sistema. Non è utilizzata l’uscita.
Le equazioni dello stimatore in catena aperta sono:
Definendo come errore di stima la seguente variabile:
si ottiene che la dinamica dell’errore di stima è data da:
Osservabilità e Ricostruibilità-- 44 Cristian Secchi
Stimatore asintotico in catena aperta
Partendo da un errore di stima iniziale:
si ottiene che l’evoluzione dell’errore di stima è data da:
Pertanto, l’evoluzione dell’errore di stima dipende dagli autovalori della matrice di stato del sistema. In particolare, se il sistema di partenza è instabile, l’errore di stima diverge anziché convergere a 0.
Inoltre, anche se il sistema LTI di cui si vuole stimare lo stato è asintoticamente stabile, non è possibile scegliere arbitrariamente la velocità con cui fare annullare l’errore di stima. Tale velocità dipende dalla dinamica del sistema LTI in considerazione.
Cristian Secchi Pag. 23
Osservabilità e Ricostruibilità-- 45 Cristian Secchi
Stimatore asintotico in catena aperta
Ricapitolando, lo stimatore asintotico in catena aperta ha i seguenti pro e contro:
Pro • Ha una struttura molto semplice. Per costruirlo basta replicare le
equazioni dinamiche del sistema LTI il cui stato è da stimare da stimare
Contro • Se il sistema il cui stato è da stimare è instabile l’errore di stima
diverge.
• Non è possibile fissare a piacere la velocità con cui l’errore di stima tende a 0.
Osservabilità e Ricostruibilità-- 46 Cristian Secchi
Stimatore asintotico in catena chiusa L’idea che sta alla base dello stimatore asintotico in catena chiusa è quella di retroazionare l’errore di stima sulle misure disponibili, cioè sull’uscita y(·), tramite un opportuno guadagno per modificare il comportamento dello stimatore asintotico. Lo schema di principio è il seguente:
Sistema
u y x
B
L
C w +
+
-
-
Stimatore asintotico in catena chiusa
Cristian Secchi Pag. 24
Osservabilità e Ricostruibilità-- 47 Cristian Secchi
Stimatore asintotico in catena chiusa
Lo stimatore asintotico in catena chiusa utilizza tutte le informazioni disponibili. Tramite un’opportuna scelta della matrice di guadagno di retroazione L è possibile controllare la velocità con cui l’errore di stima tende a 0.
Le equazioni dello stimatore in catena chiusa sono:
Definendo come errore di stima la seguente variabile:
è possibile calcolare la dinamica dell’errore di stima.
e considerando che
Siccome non si ha nessuna informazione su x(0), si può porre lo stato iniziale dello stimatore a un valore casuale; spesso si pone
Osservabilità e Ricostruibilità-- 48 Cristian Secchi
Stimatore asintotico in catena chiusa
La dinamica dell’errore di stima dipende dagli autovalori della matrice A+LC; pertanto lo stimatore è uno stimatore asintotico dello stato se e solo se gli autovalori della matrice A+LC hanno parte reale negativa.
Per il progetto di uno stimatore asintotico dello stato occorre scegliere la matrice dei guadagni L in modo che gli autovalori della matrice A+LC abbiano tutti parte reale negativa. Inoltre, per assegnare arbitrariamente la velocità a cui tende a zero l’errore di stima, è necessario poter assegnare arbitrariamente gli autovalori della matrice A+LC tramite un’opportuna scelta di L.
Cristian Secchi Pag. 25
Osservabilità e Ricostruibilità-- 49 Cristian Secchi
Scelta del guadagno di retroazione
Nello studio della raggiungibilità, abbiamo visto che, data un coppia di matrici (A,B) è possibile modificare a piacimento gli autovalori della parte raggiungibile del sistema; in particolare è possibile scegliere una matrice K tale che gli autovalori di (A+BK) relativi alla parte raggiungibile siano in una posizione desiderata.
Consideriamo un sistema LTI puramente dinamico descritto da:
In generale, grazie alla dualità tra raggiungibilità e osservabilità, si ha che:
quindi, il sottospazio di osservabilità individuato dalla coppia di matrici (A,C) è uguale al sottospazio di raggiungibilità individuato dalla coppia di matrici (AT,CT).
Osservabilità e Ricostruibilità-- 50 Cristian Secchi
Scelta del guadagno di retroazione
E’ quindi possibile scegliere una matrice K tale che gli autovalori di AT+CTK relativi alla parte raggiungibile siano in una posizione desiderata. Per dualità, allora, è possibile tramite una matrice KT portare nella stessa posizione desiderata gli autovalori relativi alla parte osservabile relativa alla coppia (A,C).
Infatti, siccome due matrici trasposte hanno lo stesso polinomio caratteristico e, quindi, gli stessi autovalori, si ha che gli autovalori della matrice A+KTC =(AT+CTK)T relativi alla parte osservabile sono nella posizione desiderata.
Se la coppia (A,C) è completamente osservabile, allora la coppia (AT,CT) è completamente raggiungibile e, quindi, dato un polinomio caratteristico p(λ) è possibile trovare una matrice K tale che il polinomio caratteristico di AT+CTK sia p(λ). Per dualità, anche il polinomio caratteristico di A+KTC è p(λ).
Cristian Secchi Pag. 26
Osservabilità e Ricostruibilità-- 51 Cristian Secchi
Scelta del guadagno di retroazione
Vale il seguente fondamentale risultato, analogo al teorema di Wonham:
Teorema Un sistema LTI di dimensione n è completamente osservabile se e solo se per ogni polinomio p(λ) monico di grado n esiste una matrice L tale che il polinomio caratteristico della matrice A+LC che descrive la dinamica dell’errore di stima che si ottiene tramite uno stimatore asintotico in catena chiusa coincide proprio con p(λ).
Questo garantisce che in un sistema LTI completamente osservabile possiamo piazzare tutti gli autovalori della matrice che descrive la dinamica dell’errore di stima in maniera arbitraria tramite un opportuna scelta di L.
Osservabilità e Ricostruibilità-- 52 Cristian Secchi
Scelta del guadagno di retroazione
Pertanto, dato un sistema LTI completamente osservabile, è possibile sfruttare le tecniche utilizzate nell’analisi della raggiungibilità per disegnare uno stimatore asintotico dello stato in cui la dinamica dell’errore di stima, cioè gli autovalori della matrice A+LC, sia assegnabile a piacere.
Se vogliamo assegnare agli autovalori della matrice di stato (A+LC) i valori λ1, …, λn , questo è equivalente a richiedere che il polinomio caratteristico del sistema chiuso in retroazione valga:
Per assegnare la dinamica desiderata all’errore di stima occorre scegliere il guadagno di retroazione in modo che la matrice A+LC abbia p(λ) come polinomio caratteristico.
Cristian Secchi Pag. 27
Osservabilità e Ricostruibilità-- 53 Cristian Secchi
Scelta del guadagno di retroazione
Per calcolare il guadagno di retroazione L si procede come segue:
1. Sia p(λ) il polinomio caratteristico desiderato per la matrice A+LC
2. Si calcoli, mediante la formula di Ackerman o il lemma di Heymann, la matrice K tale che il polinomio caratteristico di AT+CTK sia p(λ)
3. Si ponga L=KT
In tal modo è possibile costruire uno stimatore asintotico la cui dinamica è indipendente da quella del sistema il cui stato è da stimare. In particolare è possibile assegnare arbitrariamente la dinamica dell’errore di stima e di fare in modo che la stima converga asintoticamente a 0 con la velocità desiderata.
Osservabilità e Ricostruibilità-- 54 Cristian Secchi
Stimatore asintotico in catena chiusa
Ricapitolando, lo stimatore asintotico in catena chiusa ha i seguenti pro e contro:
Contro • La struttura dello stimatore asintotico in catena chiusa è più
complessa di quella dello stimatore in catena aperta
Pro • Anche se il sistema il cui stato è da stimare è instabile si può
disegnare lo stimatore in modo che l’errore di stima converga a 0
• E’ possibile fissare a piacere la velocità con cui l’errore di stima tende a 0.
I vantaggi sono molto maggiori degli svantaggi dovuti alla maggiore complessità realizzativa. In pratica si usano sempre stimatori asintotici in catena chiusa.
Cristian Secchi Pag. 28
Osservabilità e Ricostruibilità-- 55 Cristian Secchi
Esempio
Si consideri il sistema LTI descritto da:
Disegnare uno stimatore asintotico dello stato in modo che la dinamica dell’errore di stima sia caratterizzata da un polinomio caratteristico p(λ)=(λ+1)2
Osservabilità e Ricostruibilità-- 56 Cristian Secchi
Esempio
La matrice di osservabilità del sistema è:
Si ha che ker O-={0} e, quindi, il sistema è completamente osservabile. Pertanto è possibile progettare uno stimatore asintotico dello stato tale che la dinamica dell’errore di stima sia assegnabile in modo arbitrario.
Esiste pertanto una matrice L tale che il polinomio della matrice A+LC sia p(λ). Per calcolare L, non è necessario scomodare la formula di Ackerman o il lemma di Heymann, visto che le matrici in gioco hanno una dimensione molto piccola. Si può procedere tramite calcolo diretto.
Cristian Secchi Pag. 29
Osservabilità e Ricostruibilità-- 57 Cristian Secchi
Esempio
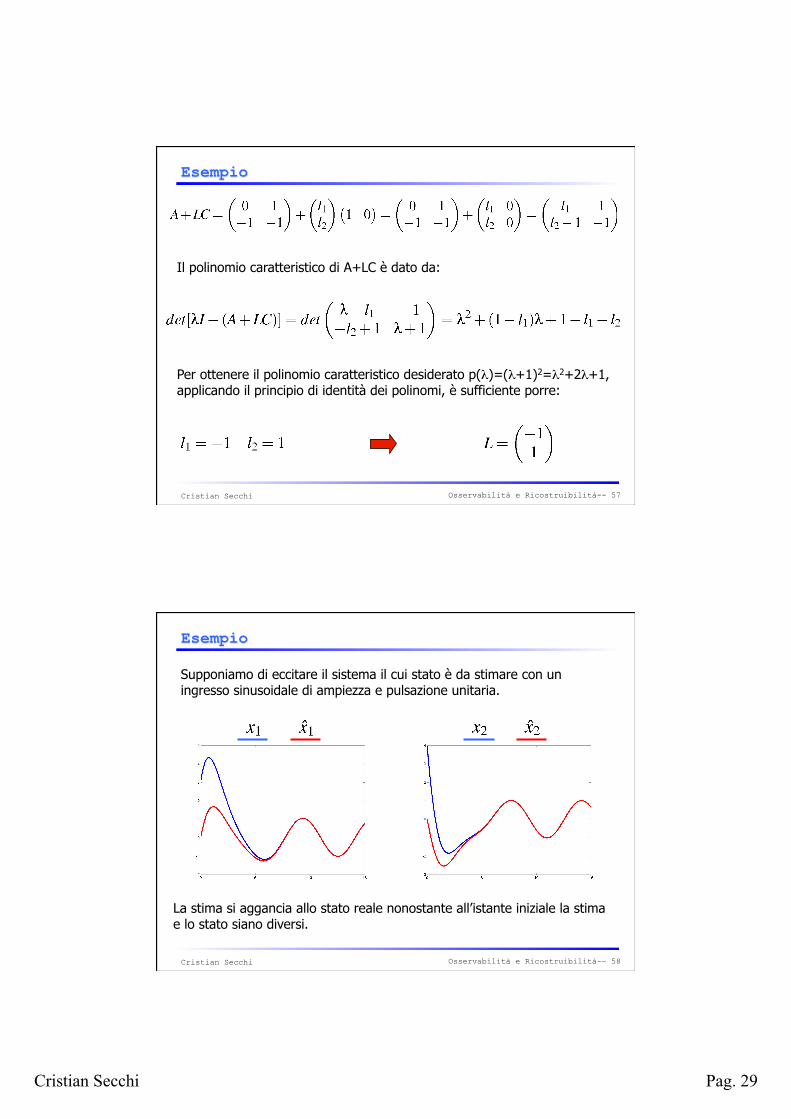
Il polinomio caratteristico di A+LC è dato da:
Per ottenere il polinomio caratteristico desiderato p(λ)=(λ+1)2=λ2+2λ+1, applicando il principio di identità dei polinomi, è sufficiente porre:
Osservabilità e Ricostruibilità-- 58 Cristian Secchi
Esempio
Supponiamo di eccitare il sistema il cui stato è da stimare con un ingresso sinusoidale di ampiezza e pulsazione unitaria.
La stima si aggancia allo stato reale nonostante all’istante iniziale la stima e lo stato siano diversi.
Cristian Secchi Pag. 30
Osservabilità e Ricostruibilità-- 59 Cristian Secchi
Sintesi del regolatore Consideriamo un sistema LTI di dimensione n completamente raggiungibile e completamente osservabile descritto da:
Abbiamo visto che, dato un sistema completamente raggiungibile, è possibile risolvere il problema della regolazione, cioè riportare a 0 lo stato del sistema con una velocità assegnabile arbitrariamente, mediante un’opportuna retroazione statica dello stato.
In particolare abbiamo visto che la retroazione statica dello stato u=Kx porta il sistema controllato nella forma:
Scegliendo opportunamente la matrice K è possibile portare a 0 lo stato del sistema con una dinamica arbitraria o, equivalentemente, assegnare alla matrice A+BK un polinomio caratteristico desiderato p(λ) qualsiasi.
Osservabilità e Ricostruibilità-- 60 Cristian Secchi
Sintesi del regolatore
Tuttavia, in generale, le variabili di stato non sono direttamente accessibili e, quindi, la legge di controllo u=Kx non è realizzabile.
Siccome il sistema LTI è completamente osservabile, è possibile costruire uno stimatore asintotico dello stato che consenta di ottenere una stima dello stato del sistema.
Siccome lo stato del sistema non è direttamente accessibile, l’idea principale per risolvere in modo realizzabile il problema della regolazione è quella di utilizzare, nella legge di retroazione statica dello stato, lo stato stimato anziché lo stato vero del sistema.
Si definisce regolatore il sistema composto dallo stimatore asintotico e dall’elemento statico di retroazione K.
Cristian Secchi Pag. 31
Osservabilità e Ricostruibilità-- 61 Cristian Secchi
Sintesi del regolatore
Le equazioni che descrivono il sistema complessivo sono:
Le equazioni del sistema complessivo possono essere descritte in termini di x e di come:
Osservabilità e Ricostruibilità-- 62 Cristian Secchi
Sintesi del regolatore
Otteniamo un sistema LTI di dimensione 2n descritto da:
Siccome le grandezza a cui si desidera assegnare una dinamica arbitraria sono lo stato x(t) del sistema e l’errore di stima e(t) dello stimatore asintotico, conviene rappresentare il sistema in termini di x ed e anziché in termini di x e .
Effettuiamo quindi il seguente cambio di variabile:
Cristian Secchi Pag. 32
Osservabilità e Ricostruibilità-- 63 Cristian Secchi
Sintesi del regolatore
La trasformazione T è non singolare e, quindi, porta a una rappresentazione equivalente del regolatore. Pertanto, nel cambio di rappresentazione, le proprietà intrinseche del sistema vengono lasciate invariate. Nelle nuove coordinate il regolatore è descritto da:
La dinamica di x(t) è determinata dagli autovalori di A+BK mentre la dinamica di e(t) è determinata dagli autovalori di A+LC. La dinamica del sistema complessivo è determinata dagli autovalori di AR.
Osservabilità e Ricostruibilità-- 64 Cristian Secchi
Sintesi del regolatore
La matrice di stato AR del sistema complessivo è una matrice triangolare superiore a blocchi, pertanto i suoi autovalori sono l’unione degli autovalori della matrice A+BK e degli autovalori della matrice A+LC:
Cioè gli autovalori del sistema complessivo coincidono con l’unione degli autovalori del sistema che si sarebbe ottenuto retroazionando direttamente il sistema dato con lo stato vero x, se questo fosse stato misurabile, e degli autovalori della matrice relativa alla dinamica dell’errore di stima. Questa proprietà viene spesso indicata con il nome di proprietà di separazione degli autovalori.
Cristian Secchi Pag. 33
Osservabilità e Ricostruibilità-- 65 Cristian Secchi
Sintesi del regolatore
La proprietà di separazione degli autovalori ci dice che il contributo alla dinamica dovuto alla retroazione statica dello stato e quello dovuto allo stimatore asintotico sono separati. Il particolare modo di progettare la retroazione statica dello stato (cioè la scelta di K) non influenza il modo di progettare lo stimatore asintotico dello stato (cioè la scelta della matrice L) e viceversa.
Pertanto, nella sintesi del regolatore, è possibile progettare la retroazione dello stato e lo stimatore asintotico in modo indipendente.
Si noti che
pertanto il comportamento del sistema da controllare approssima tanto più il comportamento ideale (cioè u(t)=Kx(t)) quanto più velocemente va a 0 l’errore di stima e(t). Pertanto, è buona norma scegliere la matrice L in modo che la velocità della dinamica di stima sia maggiore della velocità desiderata per lo stato del sistema.
Osservabilità e Ricostruibilità-- 66 Cristian Secchi
Sintesi del regolatore
Di seguito è riportata la procedura per la sintesi del regolatore. Supponiamo che p(λ) sia il polinomio caratteristico da assegnare alla matrice di stato del sistema chiuso in retroazione:
1. Progetto della retroazione statica: Scegliere la matrice K di retroazione in modo che la matrice A+BK abbia come polinomio caratteristico p(λ)
2. Progetto dell’osservatore: Disegnare un osservatore dello stato tale che la dinamica dell’errore di stima sia più veloce di quella imposta da p(λ); pertanto scegliere L in modo che il polinomio caratteristico di A+LC abbia radici “più negative” di quelle di p(λ)
3. Progetto della legge di controllo: Utilizzare come legge di controllo:
Cristian Secchi Pag. 34
Osservabilità e Ricostruibilità-- 67 Cristian Secchi
Sintesi del regolatore
Lo schema del regolatore è:
Sistema
u y x
B
L
C w +
+
-
-
Stimatore asintotico in catena chiusa
K Regolatore
Osservabilità e Ricostruibilità-- 68 Cristian Secchi
Sintesi del regolatore
• Il regolatore costruito è realizzabile in quanto non utilizza direttamente lo stato del sistema da controllare ma ne utilizza una stima che ottiene, tramite uno stimatore asintotico, dal modello del sistema e dai segnali di ingresso e uscita.
• Perché il regolatore risolva il problema della regolazione a zero con una velocità arbitraria, il sistema da controllare deve essere completamente raggiungibile e completamente osservabile
• La dinamica del sistema controllato approssima tanto meglio il caso ideale (cioè la retroazione statica dello stato “vero” del sistema) quanto più velocemente va a 0 la dinamica dell’errore di stima.
• E’ bene che gli autovalori della matrice A+LC siano più negativi dell’autovalore più negativo della matrice A+BK
• Non è bene esagerare nel disegno dello stimatore. Se L viene disegnata in modo da avere autovalori molto negativi, si amplia la banda passante dello stimatore e, quindi, c’è il rischio di amplificare eventuali rumori di misura sull’uscita
Cristian Secchi Pag. 35
Osservabilità e Ricostruibilità-- 69 Cristian Secchi
Esempio – Pendolo inverso
M
m
mg
J
ϑ
u(t)
L
V H
F
Calcolare una retroazione dinamica dell’uscita ϑ che stabilizzi il sistema nell’intorno del punto ϑ=0
x
y
La posizione dell’asta rispetto al carrello è individuata da ϑ mentre x individua la posizione del carrello.
La posizione angolare ϑ dell’asta è misurabile
Osservabilità e Ricostruibilità-- 70 Cristian Secchi
Esempio – Calcolo del modello
Il sistema è composto da due sottosistemi: l’asta e il carrello. L’asta è vincolata al carrello tramite una cerniera che ne vincola il movimento alla sola rotazione attorno all’asse passante per la cerniera e perpendicolare al piano xy. Il carrello può muoversi solo lungo l’asse x sotto l’azione di una forza u(t). L’asta e il carrello interagiscono tramite una forza F diretta lungo l’asta che può essere scomposta in una componente verticale V e una componente orizzontale H.
Quello che ci interessa modellare è la dinamica dell’asta rispetto al carrello e il ruolo che riveste la forza u in essa.
Il modello del sistema si può ottenere facendo bilanci di forza e coppia sia per l’asta che per il carrello.
Cristian Secchi Pag. 36
Osservabilità e Ricostruibilità-- 71 Cristian Secchi
Esempio – Calcolo del modello
Dinamica dell’asta
Dal bilancio delle forze sulla massa m (la massa dell’asta è supposta trascurabile), si ottiene che:
Tenendo conto che l’accelerazione di gravità è diretta nel senso negativo dell’asse y e che H e V sono, rispettivamente, le componenti lungo l’asse x e lungo l’asse y della forza F, il bilancio di forze può essere scritto come una coppia di equazioni che descrivono il comportamento dell’asta lungo l’asse x e lungo l’asse y:
Osservabilità e Ricostruibilità-- 72 Cristian Secchi
Esempio – Calcolo del modello
Il bilancio delle coppie ci dà la seguente equazione:
La dinamica dell’asta, pertanto, è rappresentata dalle seguenti equazioni:
Cristian Secchi Pag. 37
Osservabilità e Ricostruibilità-- 73 Cristian Secchi
Esempio – Calcolo del modello
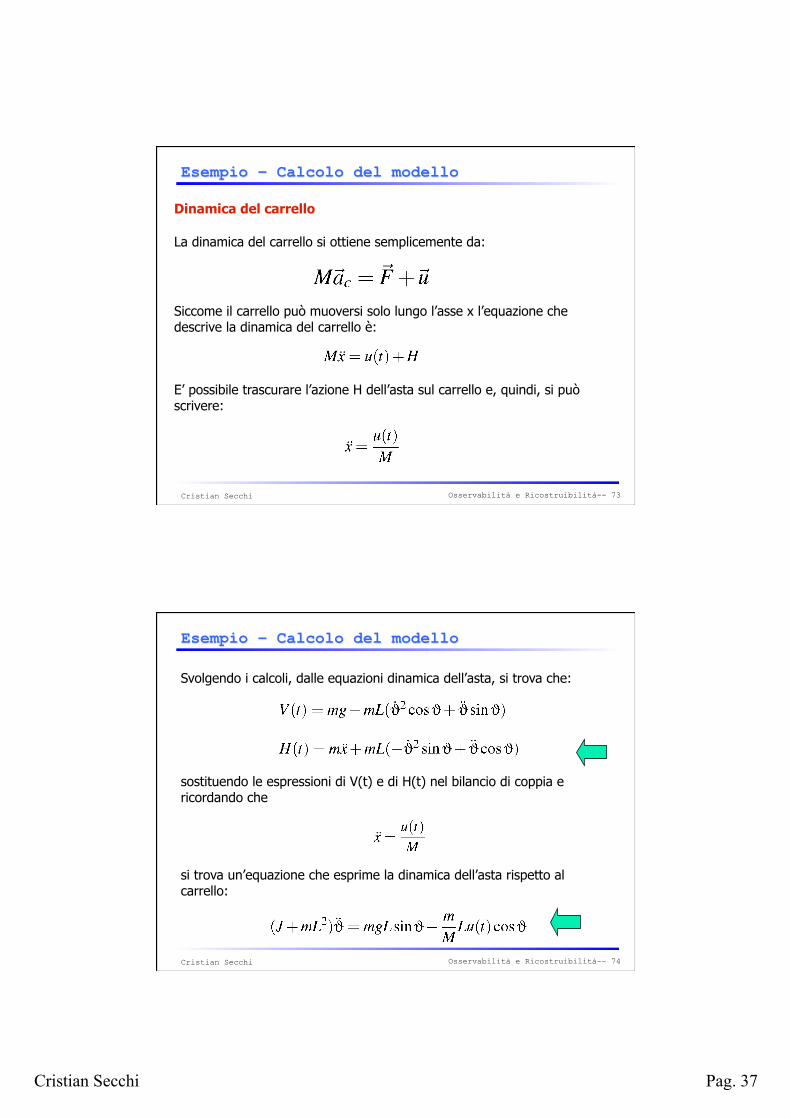
Dinamica del carrello
La dinamica del carrello si ottiene semplicemente da:
Siccome il carrello può muoversi solo lungo l’asse x l’equazione che descrive la dinamica del carrello è:
E’ possibile trascurare l’azione H dell’asta sul carrello e, quindi, si può scrivere:
Osservabilità e Ricostruibilità-- 74 Cristian Secchi
Esempio – Calcolo del modello
Svolgendo i calcoli, dalle equazioni dinamica dell’asta, si trova che:
sostituendo le espressioni di V(t) e di H(t) nel bilancio di coppia e ricordando che
si trova un’equazione che esprime la dinamica dell’asta rispetto al carrello:
Cristian Secchi Pag. 38
Osservabilità e Ricostruibilità-- 75 Cristian Secchi
Esempio – Calcolo del modello
Ponendo, per brevità:
l’equazione può essere descritta come:
ponendo:
il sistema può essere descritto nello spazio degli stati come:
Osservabilità e Ricostruibilità-- 76 Cristian Secchi
Esempio – Calcolo del modello
Siccome la posizione angolare dell’asta è misurabile:
Cristian Secchi Pag. 39
Osservabilità e Ricostruibilità-- 77 Cristian Secchi
Esempio – Studio dell’equilibrio
Siamo interessati allo studio dei punti di equilibrio del sistema in quiete. Quando u=0, i punti di equilibrio dell’asta si trovano ponendo:
Ho due soluzioni:
la seconda soluzione non è fisicamente accettabile perché l’asta non può andare sotto al carrello. Pertanto il sistema ha un solo punto di equilibrio che è quello nell’intorno del quale dobbiamo stabilizzare il sistema.
Osservabilità e Ricostruibilità-- 78 Cristian Secchi
Esempio – Studio dell’equilibrio
In un intorno del punto di equilibrio (0,0) è possibile approssimare il sistema non lineare che abbiamo trovato con un sistema LTI mediante la tecnica della linearizzazione. Possiamo quindi scrivere:
quindi, la dinamica del sistema linearizzato risulta:
Cristian Secchi Pag. 40
Osservabilità e Ricostruibilità-- 79 Cristian Secchi
Esempio – Studio dell’equilibrio
Pertanto, nell’intorno del punto di equilibrio x=(0,0) u=0, il sistema può essere rappresentato come:
Osservabilità e Ricostruibilità-- 80 Cristian Secchi
Esempio – Studio della stabilità
La stabilità del punto di equilibrio corrispondente a x=(0,0), u=0, può essere studiata analizzando gli autovalori della matrice di stato del sistema linearizzato. In particolare si ha che gli autovalori di A si ottengono risolvendo:
da cui segue che gli autovalori di A sono:
Pertanto, il punto di equilibrio è instabile. Il nostro compito è di trovare, se possibile, un ingresso u(¢) che stabilizzi l’equilibrio. Il problema può, quindi, essere visto come un problema di regolazione per il sistema linearizzato descritto da (A,B,C).
Cristian Secchi Pag. 41
Osservabilità e Ricostruibilità-- 81 Cristian Secchi
Esempio – Studio della raggiungibilità
La matrice di raggiungibilità del sistema è:
Il rango di R+ è 2 e, quindi, ImR+=X e, quindi, il sistema è completamente raggiungibile. E’ pertanto possibile progettare una retroazione statica dello stato u=Kx tale che gli autovalori del sistema chiuso in retroazione siano assegnabili a piacere; in altre parole, è possibile trovare una matrice K tale che A+BK ha gli autovalori nella posizione desiderata.
Siccome il nostro compito è quello di stabilizzare il punto di equilibrio, dobbiamo fare in modo che gli autovalori della matrice A+BK abbiano tutti parte reale negativa.
Osservabilità e Ricostruibilità-- 82 Cristian Secchi
Esempio – Studio della raggiungibilità
Imponiamo, per esempio, che gli autovalori di A+BK siano entrambi in -2. Questo equivale a imporre che il polinomio caratteristico di A+Bk sia:
Siccome il sistema è completamente raggiungibile e ha un solo ingresso, è possibile usare la formula di Ackerman per calcolare K:
svolgendo i calcoli si trova:
Cristian Secchi Pag. 42
Osservabilità e Ricostruibilità-- 83 Cristian Secchi
Esempio – Studio della raggiungibilità
L’azione di controllo:
porta gli autovalori del sistema chiuso in retroazione in -2 e, quindi, stabilizza il sistema. Sfortunatamente lo stato non è accessibile e, quindi, l’azione trovata non è realizzabile.
In virtù della proprietà di separazione degli autovalori, se fosse possibile realizzare uno stimatore asintotico dello stato per il sistema, potrei usare la stima dello stato anziché lo stato “vero” per l’implementazione di u(¢). Gli autovalori del sistema controllato risulterebbero comunque posizionati in -2 e il sistema continuerebbe a essere stabilizzato dall’azione di controllo.
Osservabilità e Ricostruibilità-- 84 Cristian Secchi
Esempio – Studio dell’osservabilità
La matrice di osservabilità del sistema è:
Il rango di O- è due e, quindi, ker O-={0} e, pertanto, il sistema è completamente osservabile. E’ possibile allora costruire uno stimatore asintotico dello stato con una dinamica dell’errore di stima arbitraria. In altre parole, è possibile trovare una matrice L tale che la matrice A+LC abbia gli autovalori nella posizione desiderata.
Per avere una buona approssimazione del comportamento che si avrebbe se si retroazionasse lo stato “vero”, occorre imporre che la dinamica dell’errore di stima sia più veloce di quella desiderata per il sistema chiuso con la retroazione statica dello stato.
Cristian Secchi Pag. 43
Osservabilità e Ricostruibilità-- 85 Cristian Secchi
Esempio – Studio dell’osservabilità
Imponiamo, per esempio, che gli autovalori di A+LC siano entrambi in -10. Questo equivale a imporre che il polinomio caratteristico di A+LC sia:
Per il calcolo di L, siccome il sistema è di dimensioni piccole, si può procedere svolgendo direttamente i calcoli. Sia
e, quindi:
Osservabilità e Ricostruibilità-- 86 Cristian Secchi
Esempio – Studio dell’osservabilità
Il polinomio caratteristico di A+LC è dato da:
Quindi, il polinomio caratteristico di A+LC è uguale a p(λ) se e solo se:
Le equazioni dell’osservatore sono quindi:
e l’azione di controllo, realizzabile, da imporre è:
Impossibil
Cristian Secchi Pag. 44
Osservabilità e Ricostruibilità-- 87 Cristian Secchi
Esempio - Simulazioni
Supponiamo che i parametri che caratterizzano il sistema siano:
M=2 Kg m= 0.5 Kg L=0.4 m J=0.02 Kgm2
Se u(¢)= e x=(0,0) il sistema rimane nella posizione di equilibrio:
Osservabilità e Ricostruibilità-- 88 Cristian Secchi
Esempio - Simulazioni
Se lo stato iniziale viene perturbato, siccome lo stato di equilibrio (0,0) è instabile, il sistema si allontana indefinitamente dall’equilibrio. Se x0=(0.1,0) l’andamento del sistema è il seguente:
Cristian Secchi Pag. 45
Osservabilità e Ricostruibilità-- 89 Cristian Secchi
Esempio - Simulazioni
Il comportamento del sistema utilizzando l’azione di controllo u=Kx è rappresentato, per condizioni iniziali (0,1),(0.1,1), …, (0.5,1), da:
Osservabilità e Ricostruibilità-- 90 Cristian Secchi
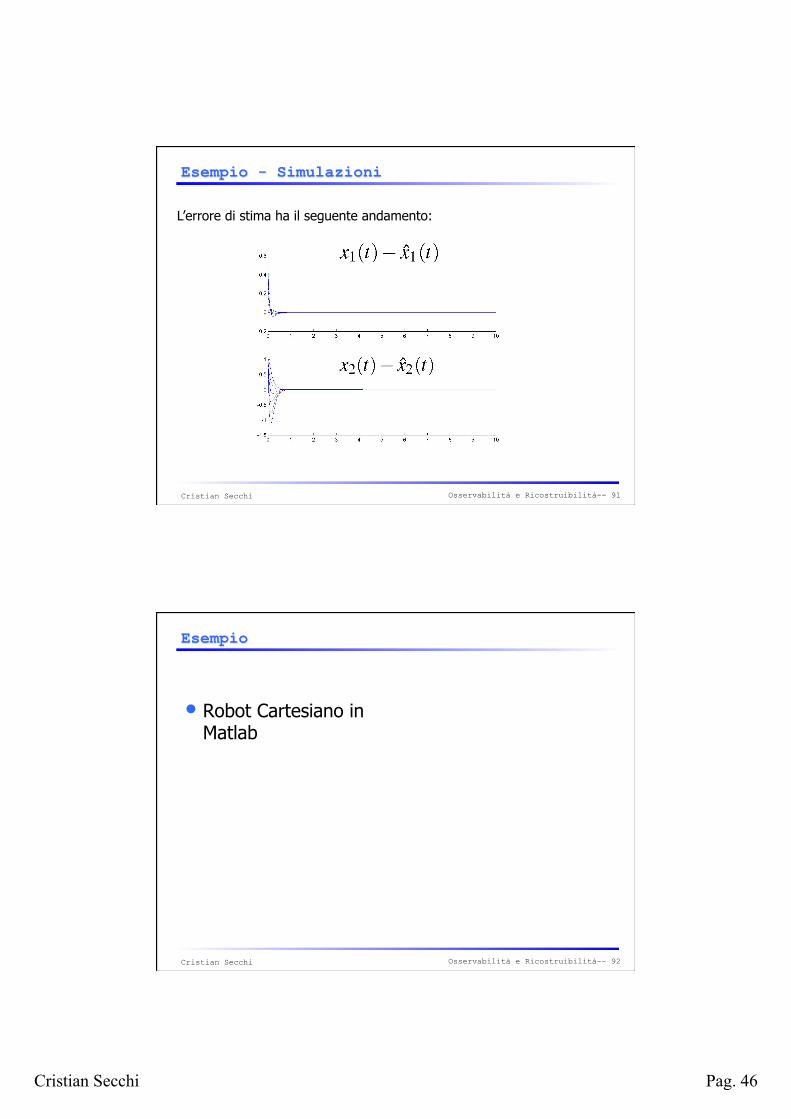
Esempio - Simulazioni
Il comportamento del sistema utilizzando la retroazione dello stato stimato anziché quella dello stato “vero”, non disponibile, è rappresentato, per condizioni iniziali (0,1),(0.1,1), …, (0.5,1), da
Cristian Secchi Pag. 46
Osservabilità e Ricostruibilità-- 91 Cristian Secchi