Page 1
Prof. Carlo Cosentino Fondamenti di Automatica, A.A. 2017/18 1
Corso di “Fondamenti di Automatica” A.A. 2017/18
Prof. Carlo Cosentino Dipartimento di Medicina Sperimentale e Clinica
Università degli Studi Magna Graecia di Catanzaro tel: 0961-3694051
[email protected] http://bioingegneria.unicz.it/~cosentino
http://wpage.unina.it/carcosen
Page 2
Prof. Carlo Cosentino Fondamenti di Automatica, A.A. 2017/18
Informazioni sul Corso
E-mail: [email protected]
Ricevimento: appuntamento via e-mail
Libro di testo: Fondamenti di Controlli Automatici, 4° Ed.
Autori: P. Bolzern, R. Scattolini, N. Schiavoni
Editore: McGraw-Hill
Integrazione con i lucidi del corso
http://wpage.unina.it/carcosen
Modalità di esame
Prova scritta
Prova orale
Elaborato Matlab
2
Page 3
Prof. Carlo Cosentino Fondamenti di Automatica, A.A. 2017/18
Prerequisiti
Polinomi: somma, prodotto, radici di polinomi,…
Vettori: somma, prodotto scalare e vettoriale,…
Trigonometria: funzioni trigonometriche e loro proprietà
Matrici: somma, prodotto, determinante, autovalori, autovettori, inversa di una
matrice,…
Limiti, Derivate, Integrali di funzioni
Numeri complessi: somma, prodotto, modulo, fase, rappresentazione algebrica e
trigonometrica, formula di eulero…
Equazioni differenziali ordinarie
Fisica I e II: leggi di Newton, legge di Ohm, principi di Kirchhoff, …
3
Page 4
Prof. Carlo Cosentino Fondamenti di Automatica, A.A. 2017/18
Introduzione al Corso
L’automazione è una disciplina che ha come obiettivo lo studio di
metodologie atte a ridurre o eliminare l’intervento dell’uomo nella
produzione di beni e/o servizi.
Vantaggi:
Affidabilità
Ripetibilità
Produttività
Riduzione dei costi
Gestione di sistemi complessi
Gestione di sistemi safety-critical
…
4
Page 5
Prof. Carlo Cosentino Fondamenti di Automatica, A.A. 2017/18
Automazione nell’Industria di Processo
5
Page 6
Prof. Carlo Cosentino Fondamenti di Automatica, A.A. 2017/18
Automazione nei veicoli per il trasporto
6
Page 7
Automazione nelle Reti di Servizi
Prof. Carlo Cosentino Fondamenti di Automatica, A.A. 2017/18 7
Page 8
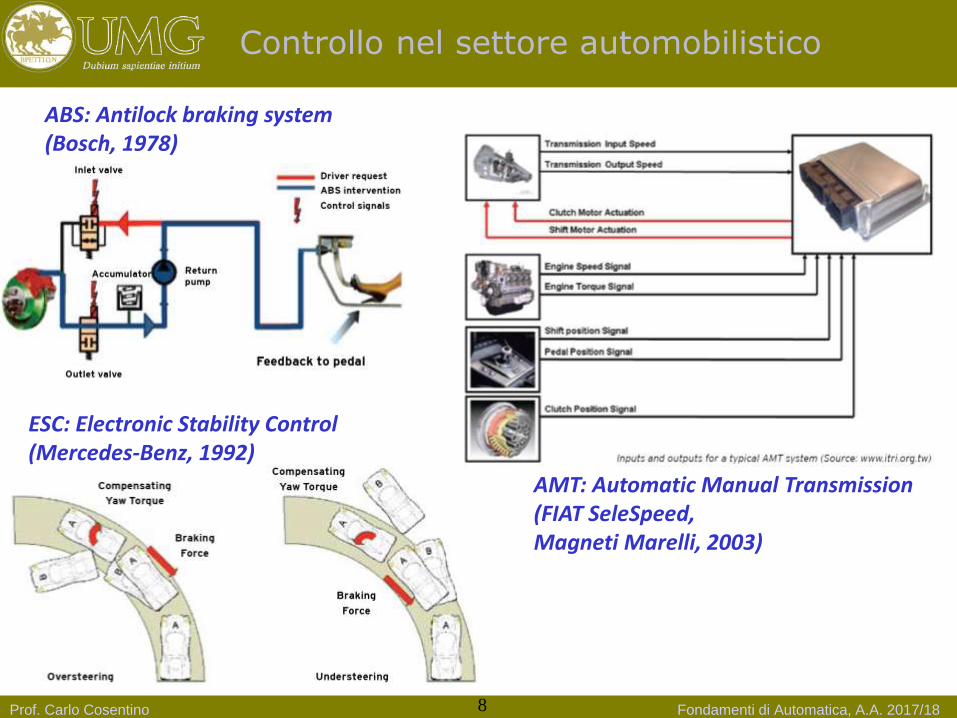
Controllo nel settore automobilistico
Prof. Carlo Cosentino Fondamenti di Automatica, A.A. 2017/18 8
ABS: Antilock braking system (Bosch, 1978)
ESC: Electronic Stability Control (Mercedes-Benz, 1992)
AMT: Automatic Manual Transmission (FIAT SeleSpeed, Magneti Marelli, 2003)
Page 9
Controllo nel settore ferroviario: Trip Optimizer
Trip Optimizer (General Electric)
Ottimizza il profilo di velocità di un treno sull’intero percorso, portando in
conto
caratteristiche del treno
caratteristiche del percorso
orari da rispettare
eventi imprevisti
Riduzione media del 10% dei consumi di energia e delle emissioni
Prof. Carlo Cosentino Fondamenti di Automatica, A.A. 2017/18 9
Page 10
Controllo del traffico autostradale
Prof. Carlo Cosentino Fondamenti di Automatica, A.A. 2017/18 10
Page 11
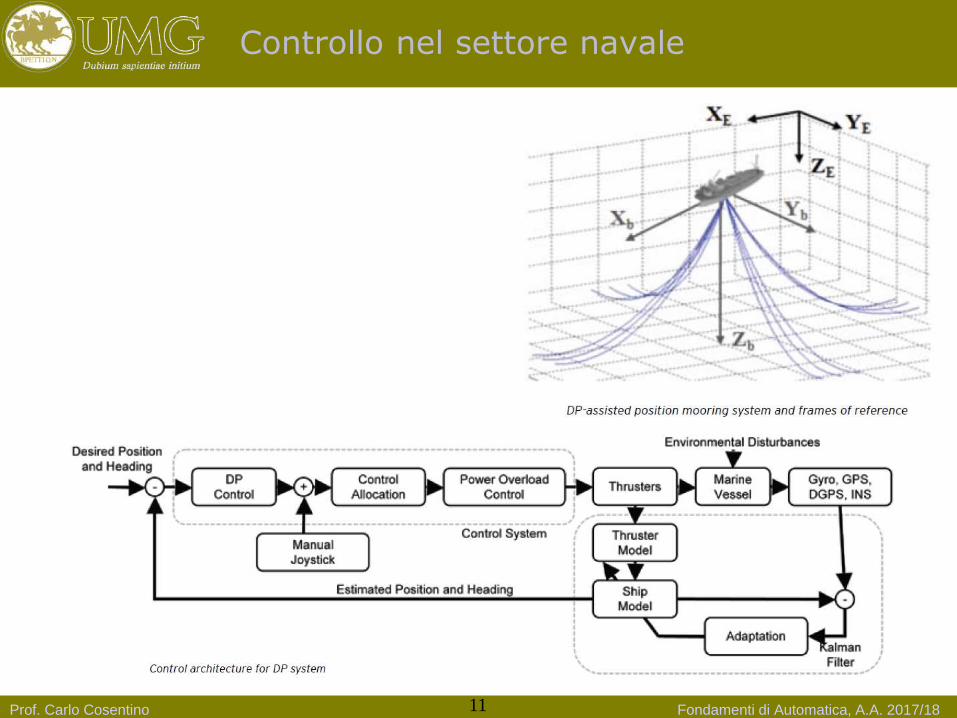
Controllo nel settore navale
Prof. Carlo Cosentino Fondamenti di Automatica, A.A. 2017/18 11
Page 12
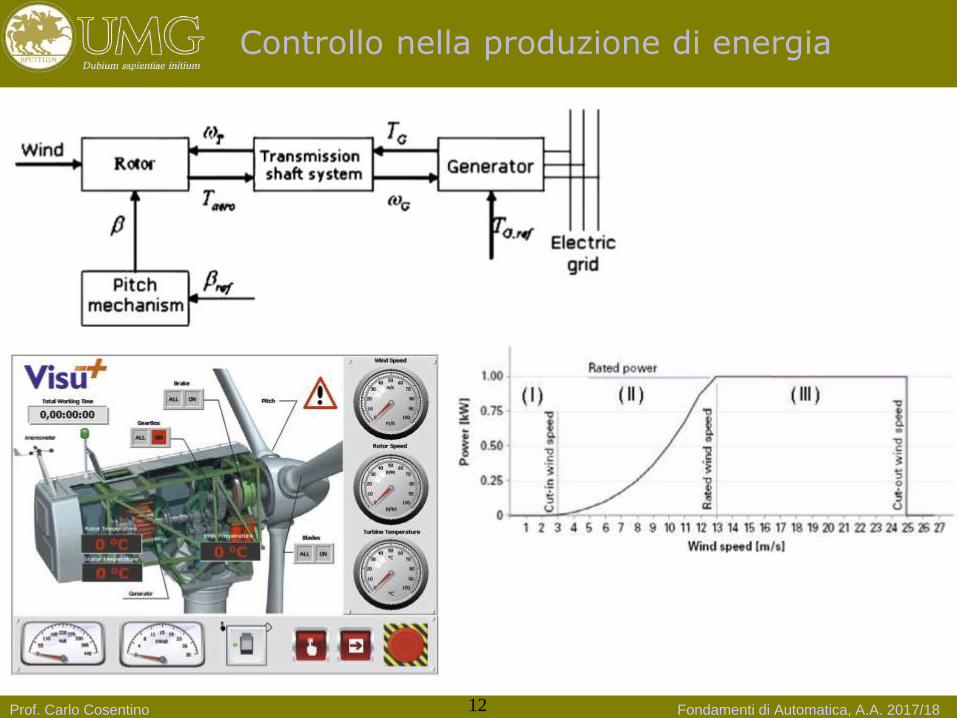
Controllo nella produzione di energia
Prof. Carlo Cosentino Fondamenti di Automatica, A.A. 2017/18 12
Page 13
Automazione nella logistica
Gestione robotizzata di un magazzino (KIVA Systems)
Prof. Carlo Cosentino Fondamenti di Automatica, A.A. 2017/18 13
Page 14
Automazione nelle Costruzioni
Prof. Carlo Cosentino Fondamenti di Automatica, A.A. 2017/18 14
Page 15
Automazione nelle Scienze della Vita
Prof. Carlo Cosentino Fondamenti di Automatica, A.A. 2017/18 15
Università Magna Græcia di Catanzaro
Page 16
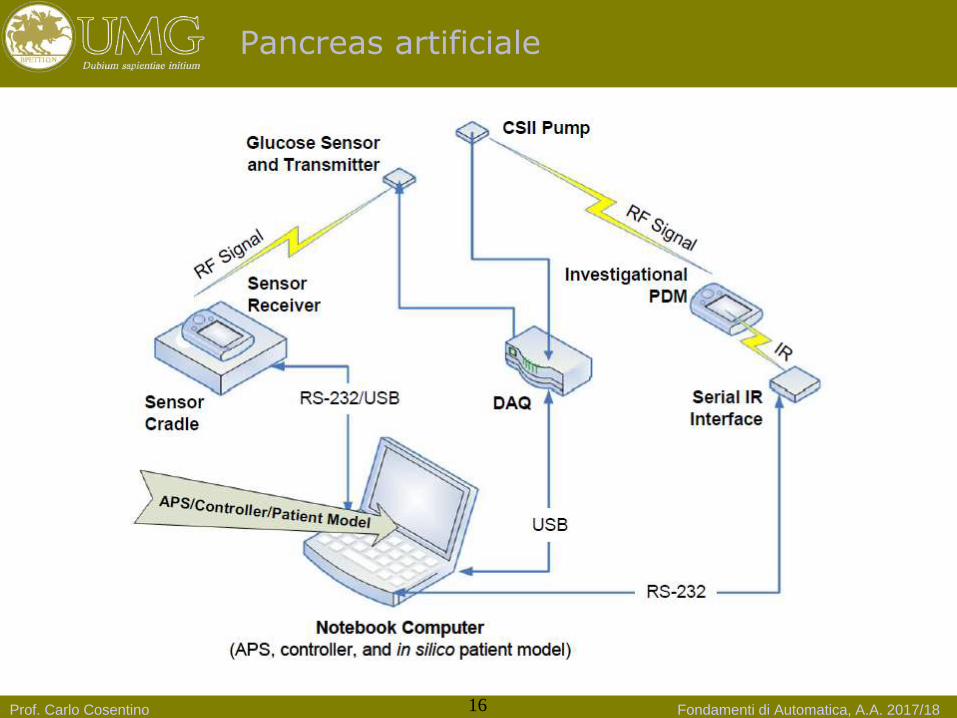
Pancreas artificiale
Prof. Carlo Cosentino Fondamenti di Automatica, A.A. 2017/18 16
Page 17
Protesi ed esoscheletri robotici
Prof. Carlo Cosentino Fondamenti di Automatica, A.A. 2017/18 17
Page 18
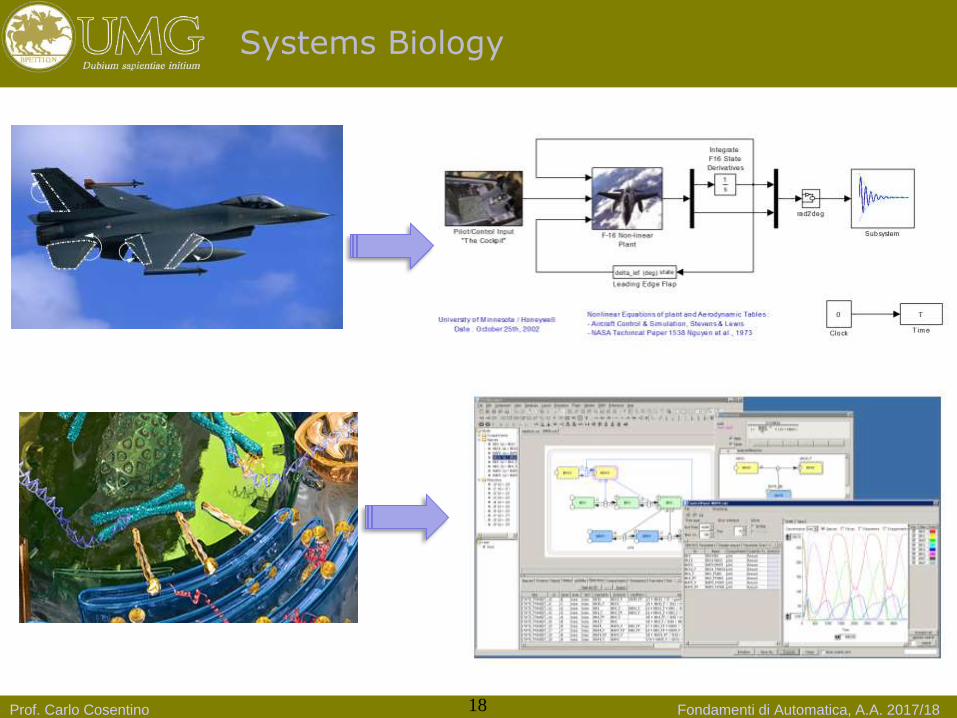
Systems Biology
Prof. Carlo Cosentino Fondamenti di Automatica, A.A. 2017/18 18
Page 19
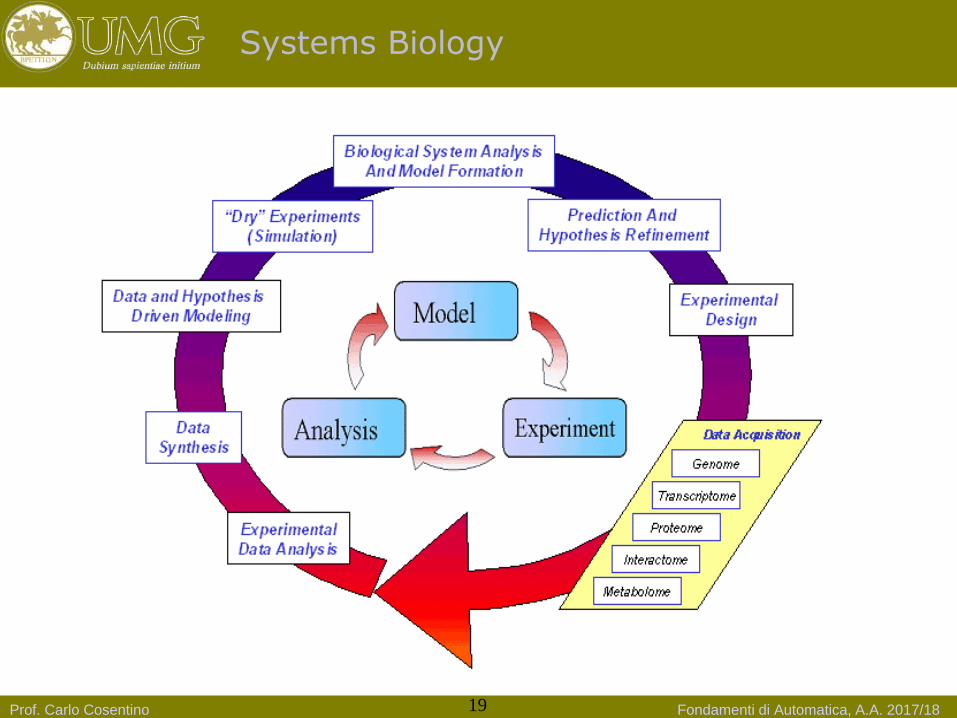
Systems Biology
Prof. Carlo Cosentino Fondamenti di Automatica, A.A. 2017/18 19
Page 20
Programma del Corso 1/2
Introduzione al corso
Modellistica dei sistemi
Modellistica di sistemi elettrici, meccanici, elettro-meccanici
Rappresentazione ISU e IU
Classificazione dei sistemi
Analisi dei sistemi lineari nel dominio del tempo
Trasformata di Laplace
Evoluzione libera e forzata
Risposte notevoli nel dominio del tempo (gradino e impulso)
I modi di evoluzione: studio della stabilità
Funzione di trasferimento
Risposta a regime ed in transitorio
Prof. Carlo Cosentino Fondamenti di Automatica, A.A. 2017/18 20
Page 21
Programma del Corso 2/2
Analisi dei sistemi lineari nel dominio della frequenza
Risposta in regime sinusoidale
Azione filtrante dei sistemi dinamici
Diagrammi di Bode
Analisi Parametrica della stabilità
Criterio di Routh-Hurtwitz
Criterio di Kharitonov
Il problema della realizzazione, osservabilità e controllabilità
Linearizzazione di sistemi nonlineari
Analisi e Simulazione dei sistemi lineari con l’ausilio del MATLAB
Prof. Carlo Cosentino Fondamenti di Automatica, A.A. 2017/18 21
Page 22
Componenti di un Sistema di Automazione
Se si esamina il comportamento umano in una qualsiasi attività
lavorativa, si osserva che gli organi essenziali in un sistema di
automazione sono di tre tipi:
Organi sensoriali
Organi di elaborazione
Organi di attuazione
Prof. Carlo Cosentino Fondamenti di Automatica, A.A. 2017/18 22
Page 23
Componenti di un Sistema di Automazione
Gli organi sensoriali svolgono la funzione di misurare le grandezze di interesse
per valutare lo stato di avanzamento e/o il corretto svolgimento del lavoro
in esecuzione.
Gli organi di elaborazione, sulla base delle misure fornite dagli organi sensoriali
e degli obiettivi del lavoro in esecuzione, decidono le azioni da
intraprendere.
Gli organi di attuazione eseguono le azioni comandate dagli organi di
elaborazione.
Prof. Carlo Cosentino Fondamenti di Automatica, A.A. 2017/18 23
Page 24
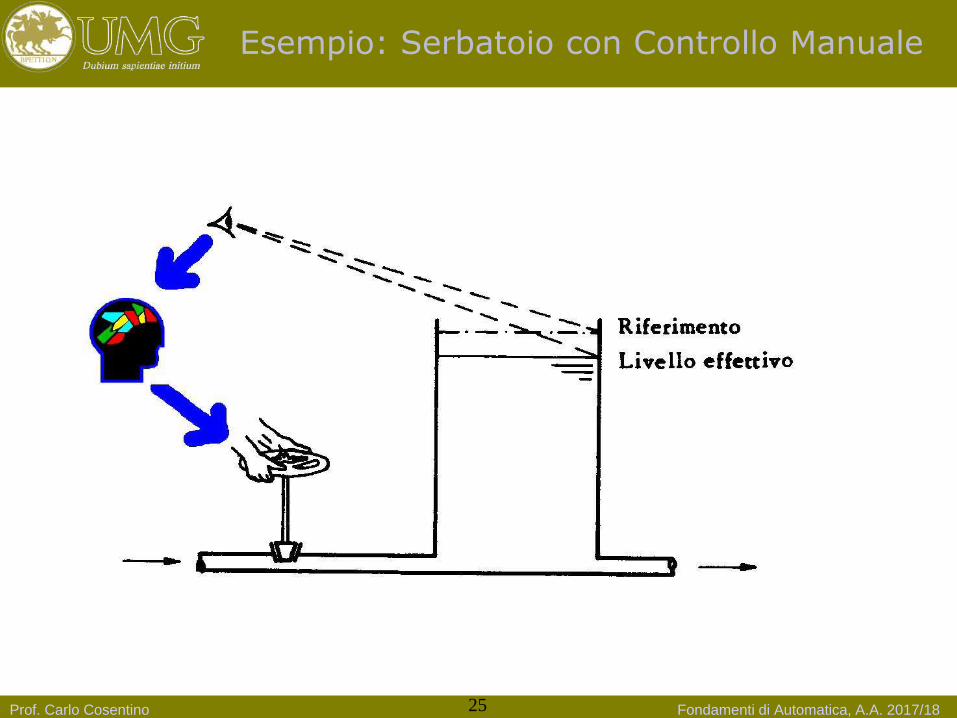
Esempio: Serbatoio
Si consideri un serbatoio e si supponga di voler mantenere costante il livello
di liquido in esso contenuto, a fronte di prelievi non noti effettuati da alcune
utenze.
Questa è una situazione che si presenta in molti ambiti, sia industriale
(impianti chimici, farmaceutici, etc.) che civile (acquedotti, rete idrica, etc.).
Il problema può essere risolto attraverso un operatore umano che dovrà
manovrare in maniera opportuna una valvola di regolazione.
Prof. Carlo Cosentino Fondamenti di Automatica, A.A. 2017/18 24
Page 25
Esempio: Serbatoio con Controllo Manuale
Prof. Carlo Cosentino Fondamenti di Automatica, A.A. 2017/18 25
Page 26
Esempio: Serbatotio – Automazione
Lo stesso compito può essere eseguito in modo automatico da
un sistema che sia in grado di svolgere le tre funzioni
dell’operatore umano:
Misurazione del livello effettivo
Decisione sul modo di intervenire sulla valvola di regolazione
Attuazione della decisione mediante un motore che azioni la valvola di
regolazione.
Prof. Carlo Cosentino Fondamenti di Automatica, A.A. 2017/18 26
Page 27
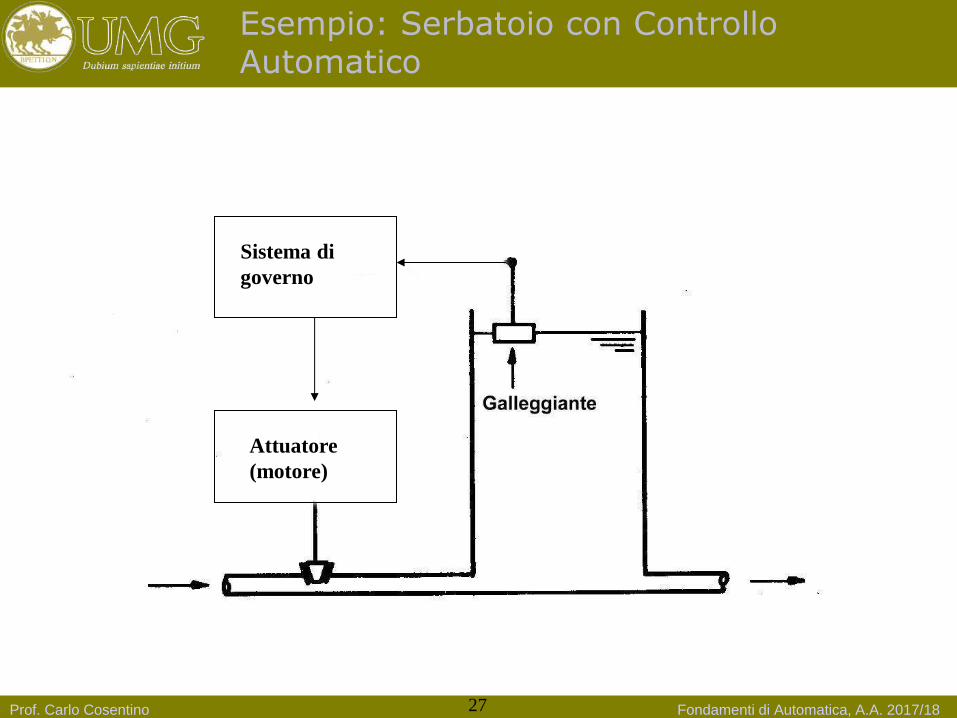
Esempio: Serbatoio con Controllo Automatico
Prof. Carlo Cosentino Fondamenti di Automatica, A.A. 2017/18 27
Sistema di
governo
Attuatore
(motore)
Page 28
Esempio: Automobile
Si consideri il problema della guida di un autoveicolo, supponendo che esso
debba percorrere una strada pianeggiante lungo una traiettoria e con una
velocità assegnate.
Questo compito è generalmente assolto da un operatore umano che, agendo
in modo opportuno su volante, freno e acceleratore, determina
completamente posizione e velocità del veicolo.
In linea di principio la guida dell’autovettura potrebbe essere (parzialmente)
automatizzata: ciò è già realizzato (cruise control e cars plotoon).
Prof. Carlo Cosentino Fondamenti di Automatica, A.A. 2017/18 28
Page 29
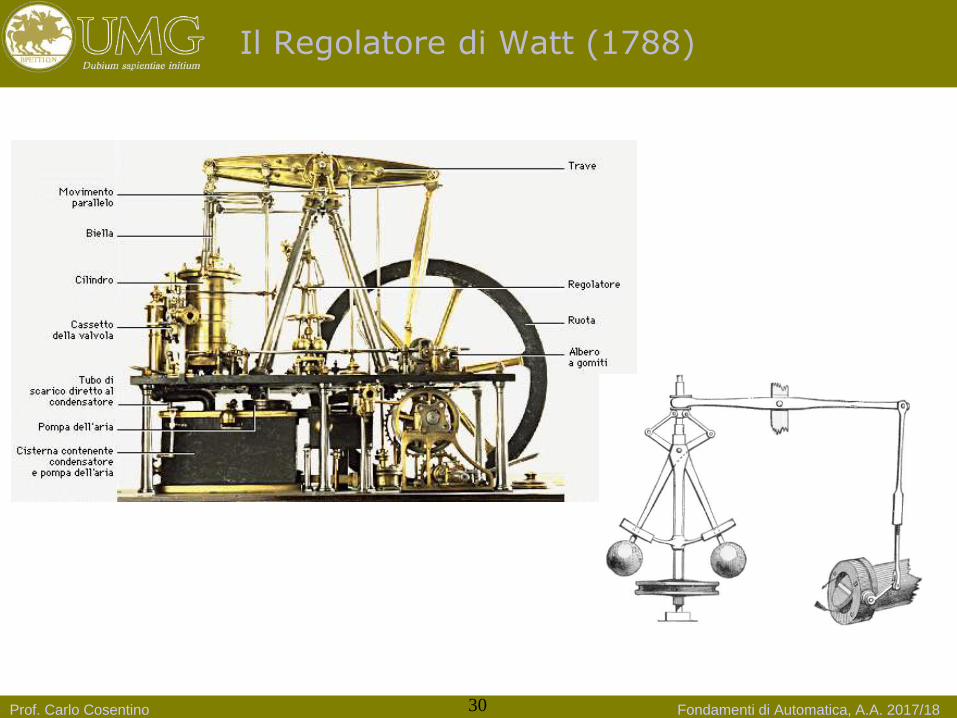
Problematiche Tecnologiche
Fino all’inizio degli anni ’50 la diffusione dell’automazione è stata limitata da
due fattori:
La difficoltà nel realizzare organi di elaborazione in grado di eseguire
algoritmi di decisione complessi
La difficoltà nel far colloquiare gli organi sensoriali, di attuazione e
decisionali.
Infatti, in un primo tempo gli organi di elaborazione erano costituiti da
sofisticati congegni di tipo meccanico o pneumatico, che consentivano di
implementare solo banali algoritmi di elaborazione.
Prof. Carlo Cosentino Fondamenti di Automatica, A.A. 2017/18 29
Page 30
Il Regolatore di Watt (1788)
Prof. Carlo Cosentino Fondamenti di Automatica, A.A. 2017/18 30
Page 31
Automazione nell’Era Digitale
Le moderne tecnologie dell’informazione hanno portato ad una rivoluzione
dei sistemi di automazione.
La disponibilità di sistemi di elaborazione potenti, versatili e a basso costo
(microprocessori) consente di implementare complessi algoritmi decisionali.
La semplificazione nello scambio di informazioni tra i vari organi di un
sistema di automazione, consentito dalle reti di comunicazione e dalla
disponibilità di attuatori e sensori “intelligenti” ha consentito di semplificare
i problemi di progetto e realizzazione, e quindi di ridurre i costi dei sistemi
di automazione.
Al giorno d’oggi l’automazione trova applicazione in moltissimi ambiti
(industriale, civile, trasporti, servizi, …)
Prof. Carlo Cosentino Fondamenti di Automatica, A.A. 2017/18 31
Page 32
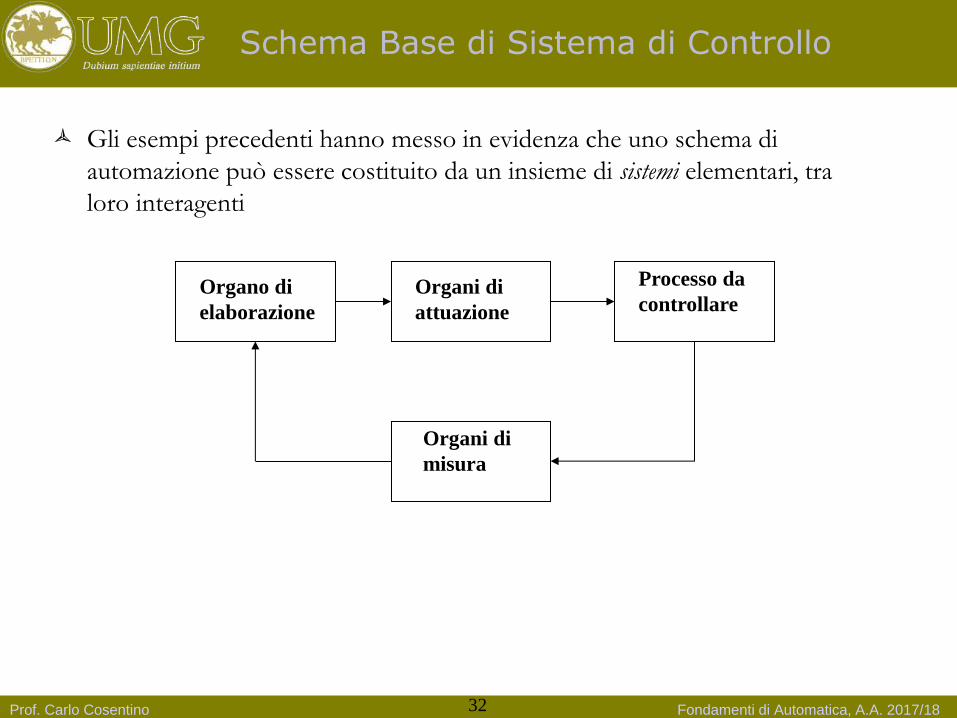
Schema Base di Sistema di Controllo
Gli esempi precedenti hanno messo in evidenza che uno schema di
automazione può essere costituito da un insieme di sistemi elementari, tra
loro interagenti
Prof. Carlo Cosentino Fondamenti di Automatica, A.A. 2017/18 32
Organi di
attuazione
Processo da
controllare Organo di
elaborazione
Organi di
misura
Page 33
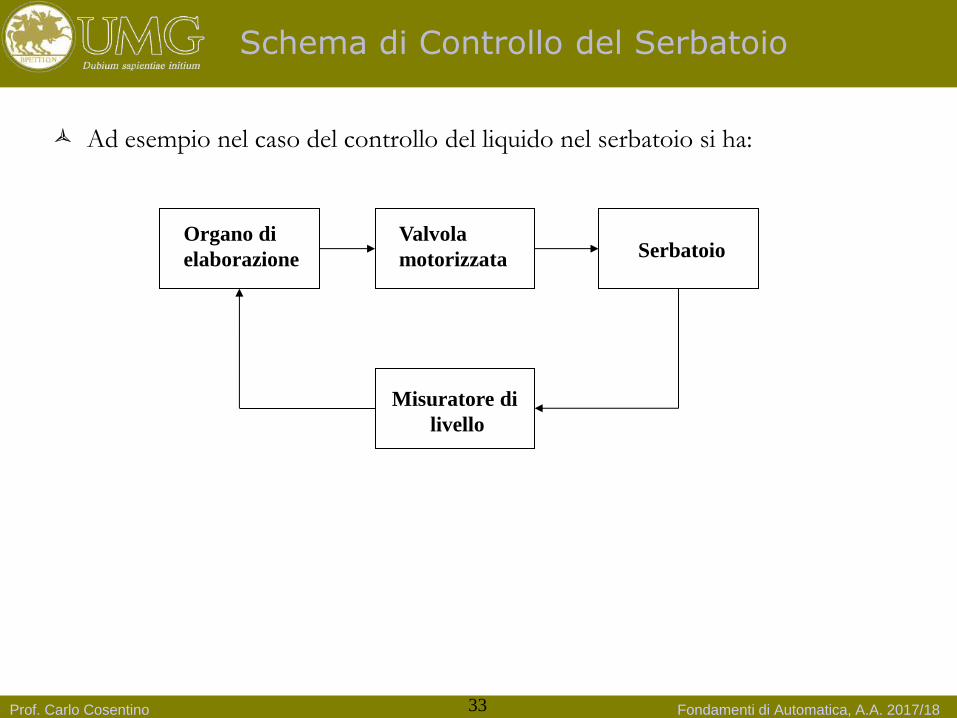
Schema di Controllo del Serbatoio
Ad esempio nel caso del controllo del liquido nel serbatoio si ha:
Prof. Carlo Cosentino Fondamenti di Automatica, A.A. 2017/18 33
Valvola
motorizzata Serbatoio Organo di
elaborazione
Misuratore di
livello
Page 34
La Teoria dei Sistemi
Per studiare il comportamento di un sistema di automazione occorre
innanzitutto studiare il comportamento dei singoli sottosistemi.
La disciplina che studia il comportamento dei sistemi, nella loro accezione
più generale, è la Teoria dei Sistemi.
Prof. Carlo Cosentino Fondamenti di Automatica, A.A. 2017/18 34
Page 35
Sistema Dinamico
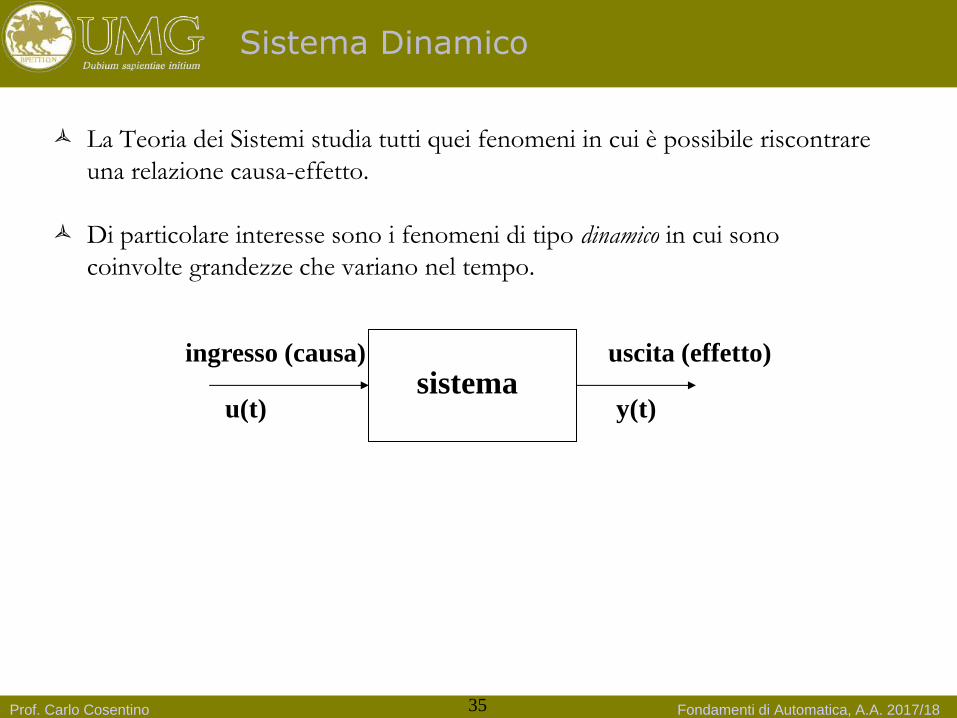
La Teoria dei Sistemi studia tutti quei fenomeni in cui è possibile riscontrare
una relazione causa-effetto.
Di particolare interesse sono i fenomeni di tipo dinamico in cui sono
coinvolte grandezze che variano nel tempo.
Prof. Carlo Cosentino Fondamenti di Automatica, A.A. 2017/18 35
ingresso (causa)
u(t)
uscita (effetto)
y(t) sistema
Page 36
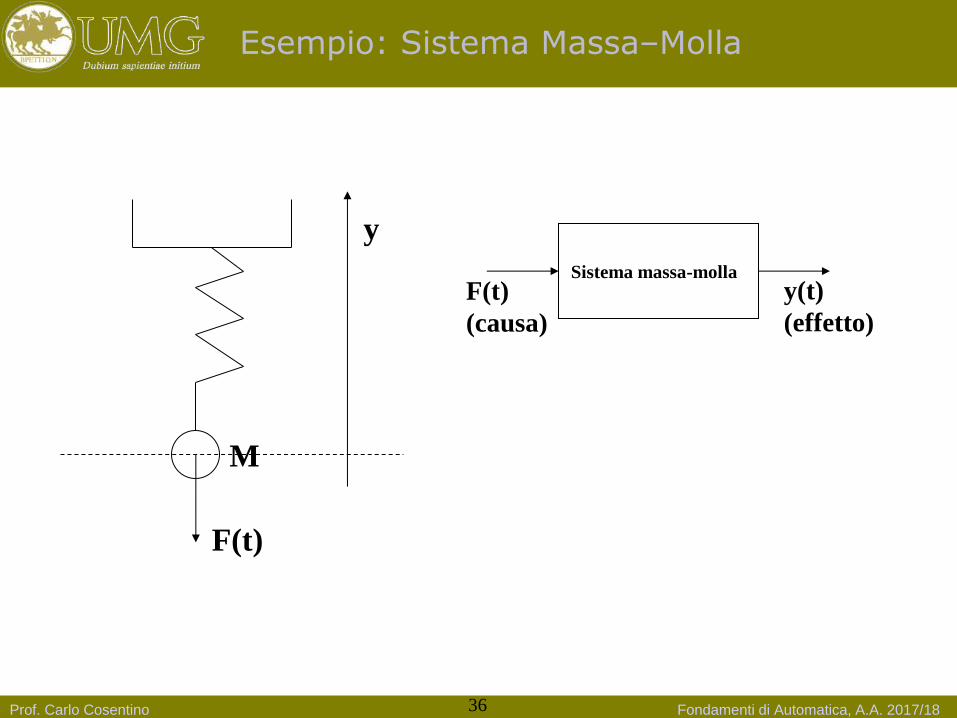
Esempio: Sistema Massa–Molla
Prof. Carlo Cosentino Fondamenti di Automatica, A.A. 2017/18 36
M
F(t)
y
F(t)
(causa)
y(t)
(effetto)
Sistema massa-molla
Page 37
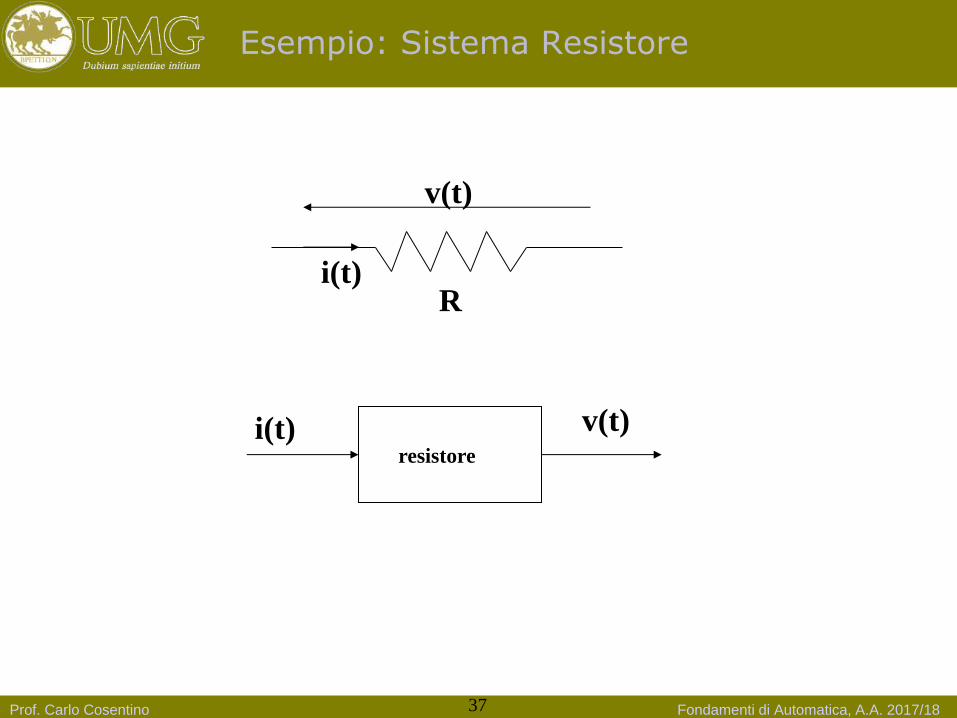
Esempio: Sistema Resistore
Prof. Carlo Cosentino Fondamenti di Automatica, A.A. 2017/18 37
R i(t)
v(t)
i(t) v(t) resistore
Page 38
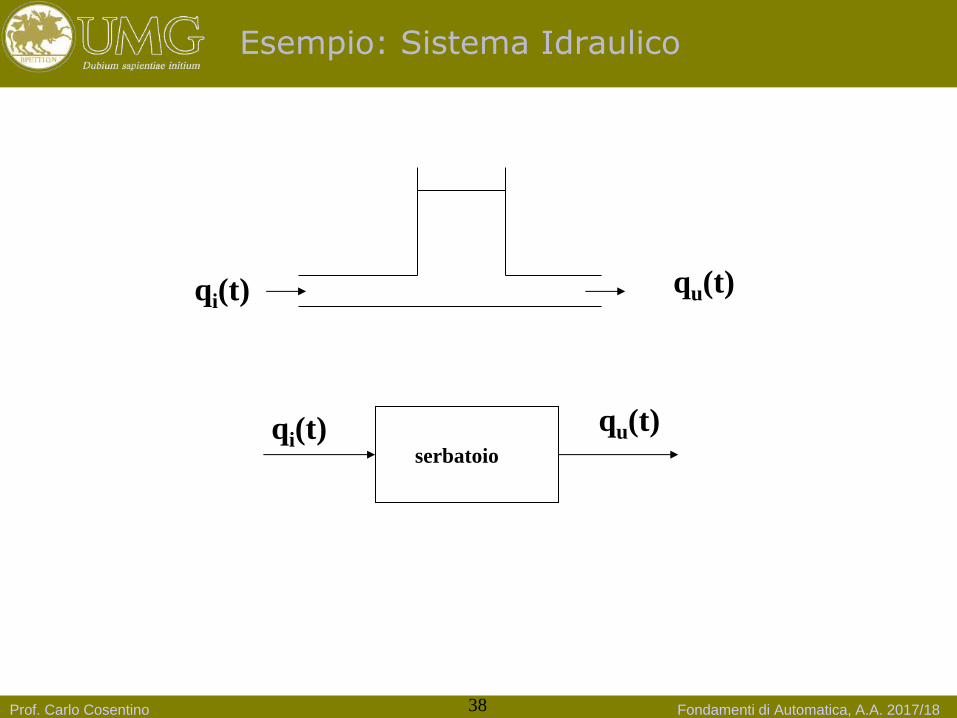
Esempio: Sistema Idraulico
Prof. Carlo Cosentino Fondamenti di Automatica, A.A. 2017/18 38
qi(t) qu(t)
qi(t) qu(t)
serbatoio
Page 39
Obiettivi della Teoria dei Sistemi
In particolare gli obiettivi della Teoria dei Sistemi sono:
Modellistica dei fenomeni fisici
Analisi del comportamento
Realizzazione di sistemi
Prof. Carlo Cosentino Fondamenti di Automatica, A.A. 2017/18 39
Page 40
Modellistica
Modellistica. Per poter analizzare un sistema occorre descrivere lo stesso
tramite un modello matematico (ad esempio tramite equazioni differenziali).
Il modello matematico dipenderà dalle leggi fisiche che regolano il sistema
(relazioni costitutive).
Ad esempio:
Sistemi meccanici: leggi di Newton
Sistemi elettrici: Legge Ohm, Principi di Kirkhoff, …
…
Prof. Carlo Cosentino Fondamenti di Automatica, A.A. 2017/18 40
Page 41
Modellistica
Data la varietà delle possibili tipologie di sistemi è impossibile trattarli tutti.
I sistemi che ci interessano maggiormente per i nostri fini sono:
Sistemi elettrici
Sistemi meccanici
Sistemi elettromeccanici
Sistemi idraulici/pneumatici
Sistemi biologici e fisiologici
Prof. Carlo Cosentino Fondamenti di Automatica, A.A. 2017/18 41
Page 42
Modellistica
Una volta messo a punto il modello matematico lo studio diventa
indipendente dal sistema in esame.
Vedremo che sistemi molto diversi possono essere descritti dallo stesso
“tipo” di equazioni.
Prof. Carlo Cosentino Fondamenti di Automatica, A.A. 2017/18 42
Page 43
Analisi del Comportamento
Un primo problema è quello della determinazione dell’evoluzione temporale
delle uscite noto che sia quello degli ingressi.
In altre parole bisogna risolvere il sistema di equazioni differenziali associato
al sistema.
Mentre in alcuni casi la soluzione è esplicitabile in forma chiusa, in altri casi
il sistema è così complicato che ciò non è possibile. In questo caso si adotta
una soluzione di tipo numerico, che va sotto il nome di procedura di
simulazione.
Altre problematiche, relative all’analisi del comportamento di un sistema,
sono lo studio della stabilità e l’analisi della risposta in frequenza del sistema.
Prof. Carlo Cosentino Fondamenti di Automatica, A.A. 2017/18 43
Page 44
Realizzazione
In alcuni casi le equazioni differenziali non descrivono una realtà
fisicamente esistente, ma piuttosto un oggetto che vogliamo realizzare.
Ad esempio realizzazione dell’elaboratore di decisioni (controllore).
Prof. Carlo Cosentino Fondamenti di Automatica, A.A. 2017/18 44
Page 45
Controlli Automatici
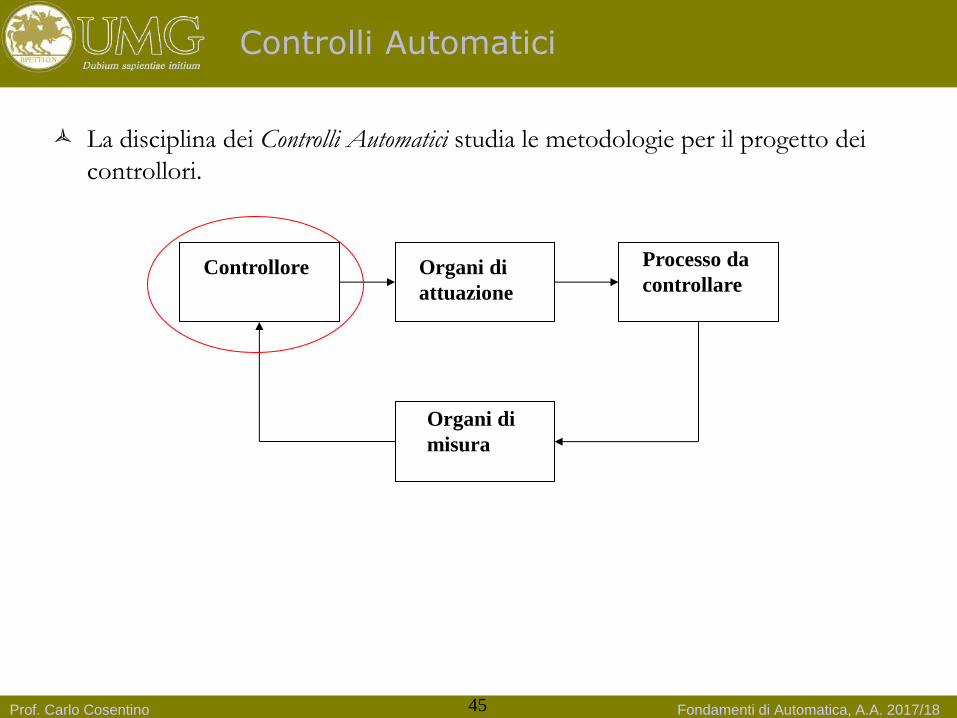
La disciplina dei Controlli Automatici studia le metodologie per il progetto dei
controllori.
Prof. Carlo Cosentino Fondamenti di Automatica, A.A. 2017/18 45
Organi di
attuazione
Processo da
controllare Controllore
Organi di
misura
Page 46
Tecnologie dei Sistemi di Controllo
In passato i controllori erano realizzati in “analogico” con tecnologia
Meccanica
Idraulica o pneumatica
Elettromeccanica
Elettrica
Elettronica
Con i controllori elettrici ed elettronici si comincia a separare la parte di
“intelligenza” da quella di “potenza” aumentando la flessibilità del
controllore
Il più recente sviluppo è costituito dai controllori basati su tecnologia
digitale, che si stanno diffondendo in modo rapido nelle più svariate
applicazioni
Prof. Carlo Cosentino Fondamenti di Automatica, A.A. 2017/18 46
Ingombro/costo Flessibilità/complessità
Page 47
Controllori Digitali: Vantaggi
I vantaggi esibiti dai controllori digitali sono:
Basso costo
Flessibilità
Possibilità di implementare leggi di controllo comunque complesse
Integrazione delle funzionalità proprie di un sistema di controllo con
funzionalità di altra natura (supervisione, diagnostica, etc.)
Prof. Carlo Cosentino Fondamenti di Automatica, A.A. 2017/18 47
Page 48
Controllori Digitali: Svantaggi
I controllori digitali presentano anche svantaggi:
Progettazione più difficile e articolata
Stabilità meno robusta
Possibilità di arresti non previsti dovuti a bug del SW
Necessità di utilizzare energia elettrica
Prof. Carlo Cosentino Fondamenti di Automatica, A.A. 2017/18 48
Page 49
Contenuti del Corso
Nel corso di Fondamenti di Automatica ci occuperemo essenzialmente delle
problematiche legate alla Teoria dei Sistemi
L’analisi dei sistemi di controllo e le metodologie per il progetto dei
controllori saranno illustrate nel corso di Controlli Automatici
Le principali tecnologie per l’implementazione dei sistemi di automazione
saranno invece trattate nel corso di Tecnologie dei Sistemi di Controllo
Prof. Carlo Cosentino Fondamenti di Automatica, A.A. 2017/18 49














![Banda Larga e DigitalDivide - wpage.unina.itwpage.unina.it/pescape/doc/bandalarga_linuxday2010_pescape.pdf · Diffusione PC, Internet e Banda Larga 19 [Rapporto Caio] Accessi Banda](https://static.documenti.site/doc/80x56/5bf713d909d3f2ac7c8b597b/banda-larga-e-digitaldivide-wpageunina-diffusione-pc-internet-e-banda-larga.jpg)















