Page 1
Tesi di Dottorato di Ricerca in
"METODI E TECNOLOGIE PER IL MONITORAGGIO AMBIENTALE"
Curriculum II
Ciclo XII
Sede Amministrativa: Università di Firenze
Modellistica fisica
di emissione atmosferica a microonde:
applicazioni alla stima dell’acqua precipitabile
mediante telerilevamento da satellite
Università di Firenze
Facoltà di Ingegneria
Dipartimento di Ingegneria Elettronica
A.A. 1998/1999
Candidato: Stefano Migliorini
Tutori: Prof. Vincenzo Cuomo
Prof. Giorgio Federici
Dott. Ing. Stefano Nativi
Coordinatore: Prof. Enzo Dalle Mese
Page 2
2
Indice
Introduzione 4
1 Importanza del vapore d’acqua atmosferico ........................................................ 4
2 Obiettivi della Tesi .................................................................................................. 7
Capitolo 1 Radiometria a microonde ................................................................ 9
1 Introduzione ............................................................................................................ 9
2 Teoria delle antenne .............................................................................................. 10
2.1 Corrispondenza fra potenza e temperatura ................................................... 14
2.2 Temperatura di antenna ................................................................................... 15
3 Processo di misura radiometrica ......................................................................... 17
4 Sensibilità del radiometro..................................................................................... 18
5 Calibrazione del radiometro ................................................................................ 18
6 Determinazione della temperatura di brillanza ................................................. 20
7 Radiometri a microonde su satellite .................................................................... 21
7.1 Il sensore SSM/I ................................................................................................ 23
7.1.1 I dati di temperatura di brillanza SSM/I ................................................ 25
7.2 Il sensore TMI ................................................................................................... 26
7.2.1 I dati di temperatura di brillanza TMI ................................................... 29
Capitolo 2 Trasferimento radiativo in atmosfera ...................................... 30
1 Radiazione non polarizzata .................................................................................. 30
2 Radiazione polarizzata.......................................................................................... 37
2.1 Trasporto di radiazione polarizzata ................................................................ 41
2.2 La matrice di fase .............................................................................................. 44
3 Scattering Rayleigh ............................................................................................... 47
3.1 Scattering Rayleigh isotropo ............................................................................ 49
4 Scattering di Mie ................................................................................................... 54
5 Il caso del telerilevamento passivo da satellite a microonde ............................. 56
5.1 Costante dielettrica complessa dell'acqua pura e del ghiaccio ..................... 57
5.2 Importanza dello scattering a microonde ....................................................... 59
5.3 Soluzione formale dell'equazione del trasporto radiativo ............................. 62
5.4 La matrice di riflessione di Fresnel: applicazione al mare calmo ................ 65
5.5 L'approssimazione di Rayleigh-Jeans ............................................................. 68
5.6 La funzione peso ................................................................................................ 68
Capitolo 3 Estinzione atmosferica nelle microonde .................................. 71
1 Introduzione .......................................................................................................... 71
2 Estinzione dovuta ai gas atmosferici ................................................................... 72
Page 3
3
2.1 Profili di riga ...................................................................................................... 74
3 Estinzione dovuta a nubi ...................................................................................... 76
4 Il Modello di Propagazione per onde Millimetriche (MPM) ............................ 77
Capitolo 4 Tecniche di inversione per la stima dei parametri del
modello ......................................................................................................................... 80
1 Inversione lineare .................................................................................................. 80
2 Inversione non lineare .......................................................................................... 82
2.1 Metodo di Levenberg-Marquardt ................................................................... 84
Capitolo 5 Elaborazione del modello diretto di emissione ...................... 87
1 Il modello atmosferico........................................................................................... 87
2 Modello diretto di emissione ................................................................................ 90
3 Rugosità della superficie marina indotta dal vento ........................................... 93
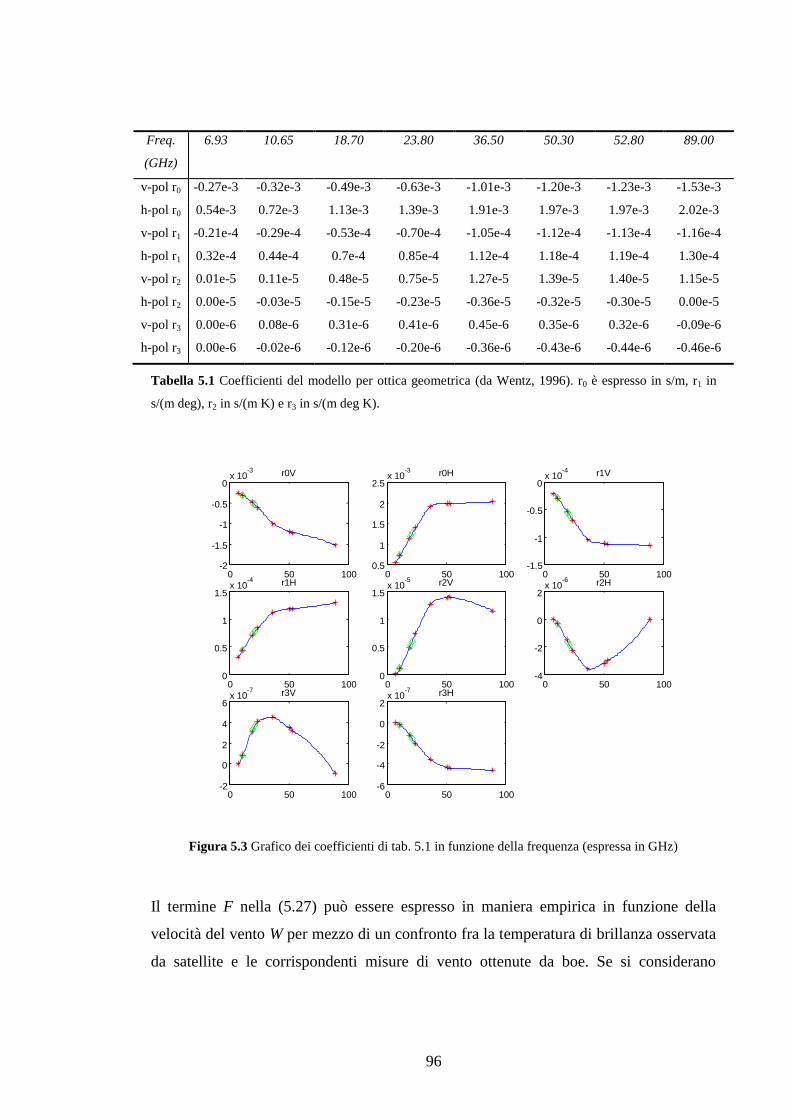
3.1 Effetti di direzione del vento ............................................................................ 99
4 Modello diretto di emissione in presenza di vento su mare ............................. 100
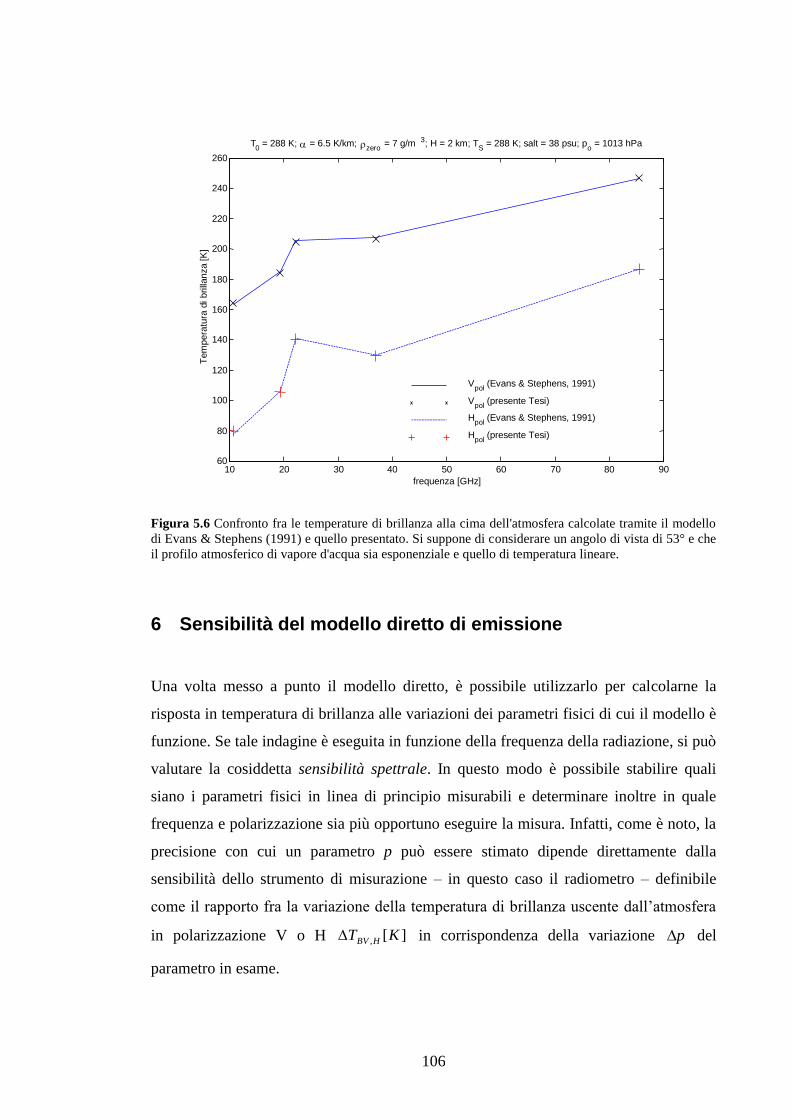
5 Confronto con il modello PolRadTran ............................................................... 101
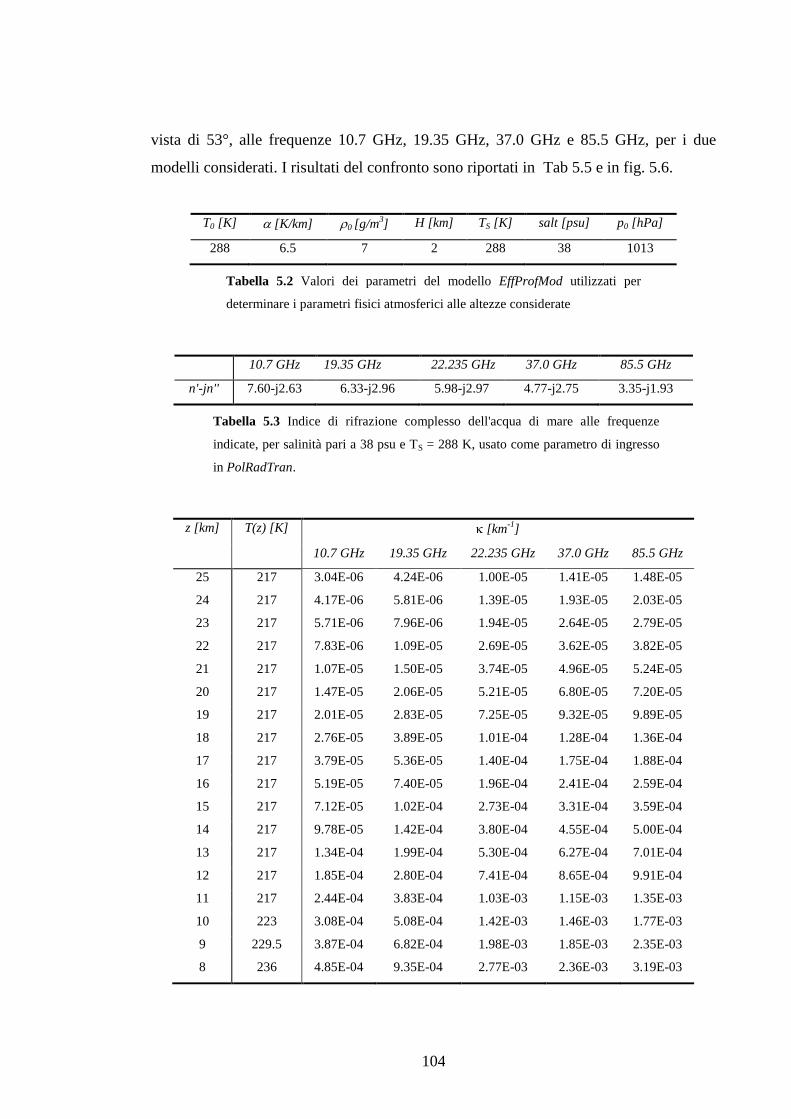
6 Sensibilità del modello diretto di emissione ...................................................... 106
Capitolo 6 Stime del contenuto colonnare di vapore d’acqua ............. 111
1 Pre-elaborazione dei dati SSM/I ........................................................................ 111
2 Pre-elaborazione dei dati TMI ........................................................................... 114
3 Casi di studio ....................................................................................................... 117
4 Determinazione dell'acqua precipitabile tramite tecnica di inversione ......... 118
5 Determinazione dell'acqua precipitabile con metodi empirici........................ 123
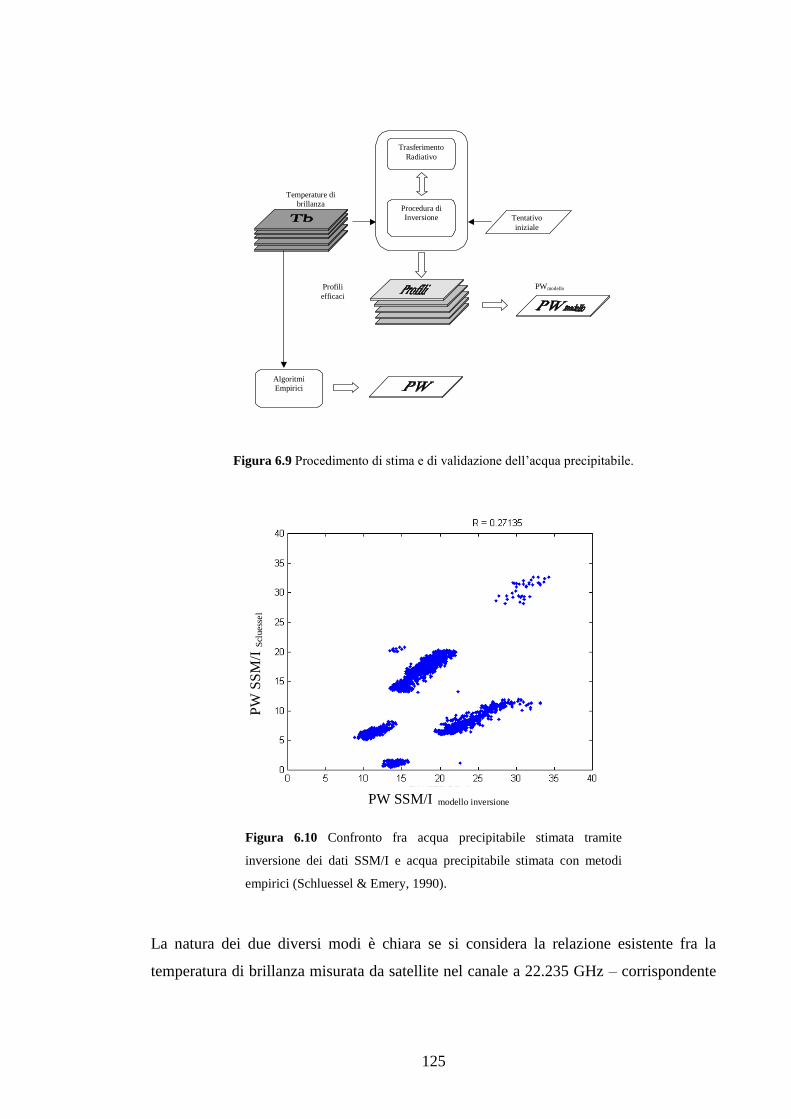
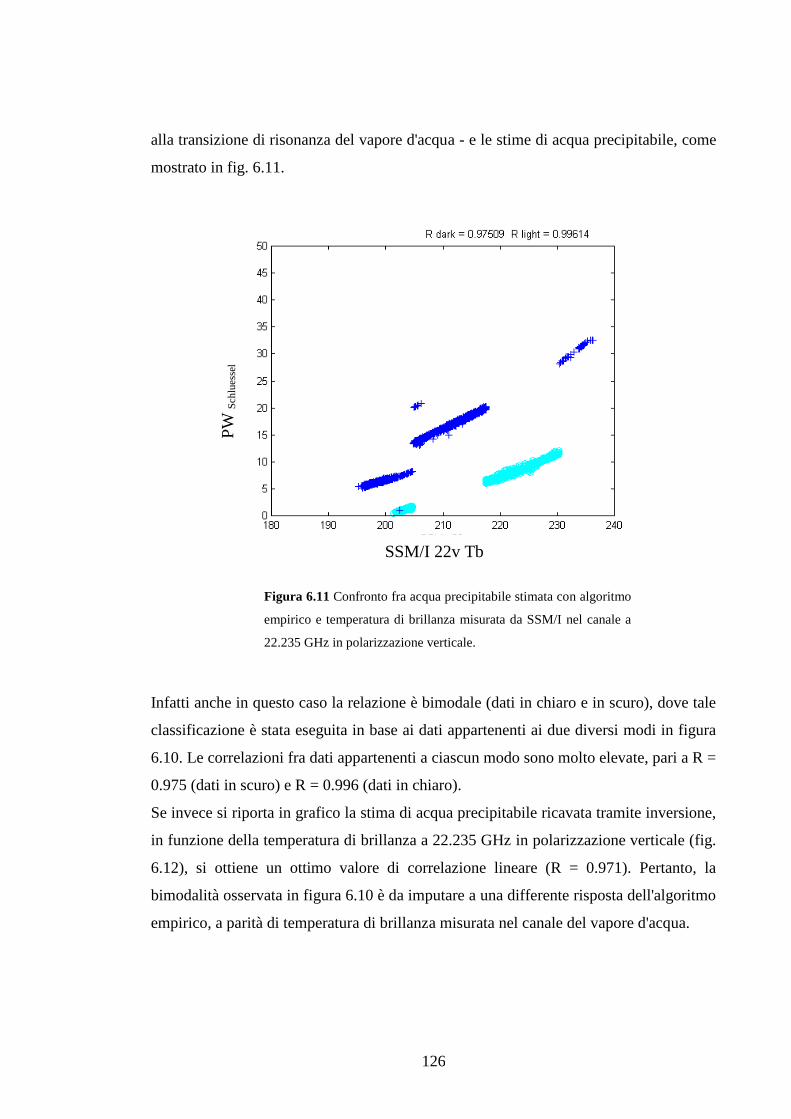
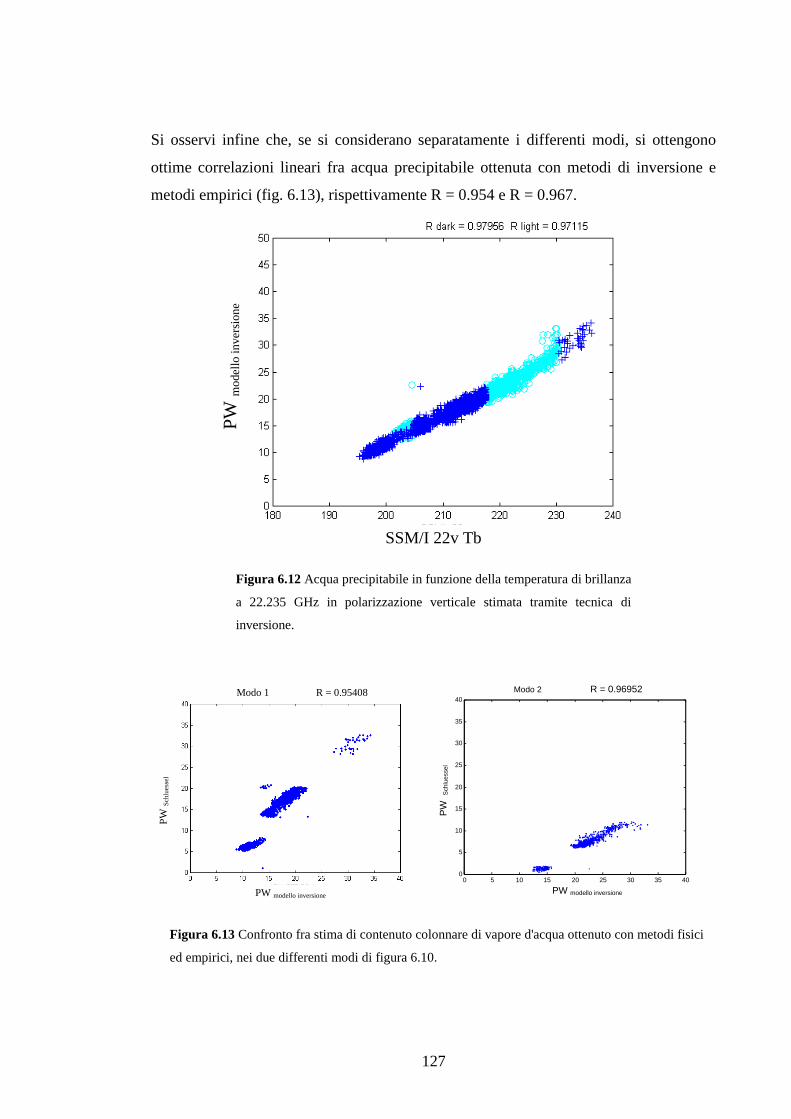
6 Confronto dei risultati ........................................................................................ 124
Conclusioni 128
Bibliografia 131
Page 4
4
Introduzione
1 Importanza del vapore d’acqua atmosferico
La composizione dell'aria secca - fino ad un'altitudine di 90 100 km, detta omosfera. -
può essere considerata uniforme sia temporalmente che spazialmente, a causa
dell'azione omogeneizzante esercitata dalla circolazione atmosferica. Altrettanto non
può essere detto riguardo le specie presenti in tracce come l'ozono e il vapore d'acqua,
che sono invece altamente variabili. Essi infatti non sono soltanto ridistribuiti dai moti
atmosferici, ma vengono invece continuamente creati in alcune regioni e distrutti in
altre.
Il vapore d'acqua è considerata la specie minore più importante a causa del suo ruolo
nella formazione delle nubi, nei processi radiativi e negli scambi energetici con gli
oceani (per es. Salby, 1996). In fig. I.1 è riportata la sua distribuzione zonale media in
funzione della latitudine e dell'altezza.
Figura I.1 Distribuzione zonale media del rapporto di mescolamento di massa (g/kg)
del vapore d'acqua (linee di livello) e di densità di vapore d'acqua (ombreggiatura) in
funzione della latitudine e dell'altezza. I toni di grigio corrispondono al 20%, 40% e
60% rispetto al massimo. Da Oort & Peixoto, 1983.
Page 5
5
Si può notare che il vapore d'acqua è concentrato quasi esclusivamente nella troposfera
(il rapporto di mescolamento ai tropici passa da un valore di circa 20 g/kg alla
superficie, a poche parti per milione alla tropopausa). Analogamente si ha un
decremento del rapporto di mescolamento in funzione del valore assoluto della
latitudine. Tale comportamento rispecchia i processi di produzione del vapore d'acqua
per evaporazione alla superficie, di ridistribuzione dovuta alla circolazione atmosferica
e di distruzione in quota e alle medie e alte latitudini a causa della condensazione e della
precipitazione.
Lo spostamento delle masse d'aria da una regione di produzione di vapore d'acqua a una
di distruzione avviene in maniera rapida: il vapore d'acqua troposferico all’interno di
una particella di aria ha una vita media breve, dell'ordine di qualche giorno. La maggior
parte di esso si forma in prossimità dell'equatore, in corrispondenza delle superfici
oceaniche calde; viene quindi trasportato verticalmente dalle celle convettive o
orizzontalmente da vortici a larga scala (fenomeno detto advezione). Si noti comunque
che l'abbondanza del vapore d'acqua ad altezze elevate è comunque limitata dai processi
di fotodissociazione dovuta all'energia solare.
Se dal punto di vista lagrangiano (solidale con la particella d’aria) si passa a un punto di
vista euleriano (ovvero in cui si considera un volume d’aria di coordinate fissate, nel
sistema di riferimento solidale con la Terra), si può affermare che si hanno variazioni di
rapporto di mescolamento del vapore d’acqua nel corso del giorno, dovute al ciclo
diurno dei processi di evapotraspirazione e di condensazione, della temperatura
superficiale, dell’intensità e direzione del vento e delle turbolenze nello strato limite
atmosferico (per es. Arya, 1988).
L’importanza del vapore d’acqua e delle nubi nella dinamica e termodinamica
dell’atmosfera è dovuta al fatto che è uno dei regolatori del bilancio energetico globale
del nostro pianeta.
Il sistema Terra-atmosfera, su tempi scala lunghi rispetto a quelli caratteristici dei
processi di ridistribuzione di energia, può essere considerato in equilibrio. La sorgente
energetica del sistema è la parte di energia solare che viene intercettata e assorbita dalla
Terra. Il rapporto fra l’energia incidente e l’energia riflessa dal sistema Terra-atmosfera
è detta albedo: conoscendo il valore numerico dell’albedo (pari circa a 0.3) e calcolando
Page 6
6
il flusso energetico proveniente dal Sole (1372 W/m2) è possibile stimare la temperatura
di corpo nero equivalente del sistema, che rappresenta la stima della temperatura del
nostro pianeta. Eseguendo tale calcolo si trova una temperatura di 255 K, sensibilmente
più fredda della temperatura superficiale globale media, pari circa a 288 K. La
superficie terrestre dunque deve subire un processo di riscaldamento da parte
dell’atmosfera: esso è dovuto all’assorbimento della parte infrarossa della radiazione
solare da parte del vapore d’acqua, delle nubi e dell’anidride carbonica in atmosfera1.
Tale radiazione viene quindi ceduta alla superficie terrestre: tale fenomeno è detto
effetto serra. In realtà il quantitativo energetico fornito alla superficie terrestre per
effetto serra è tale che, in assenza di altri fenomeni, la superficie terrestre dovrebbe
avere una temperatura globale superiore di circa 50 K rispetto a quella reale.
L’equilibrio è mantenuto tramite trasferimento conduttivo dalla superficie terrestre
all’atmosfera, detto calore sensibile, e soprattutto tramite trasferimento di calore latente,
dovuto all’evaporazione degli oceani. In tale processo è nuovamente coinvolto il vapore
d’acqua, che per quanto detto rappresenta una delle forme in cui l’atmosfera
immagazzina energia. Essa viene rilasciata tramite condensazione - in nubi e
precipitazione verso la superficie - che aumenta la temperatura della massa d’aria,
alimentando così i moti convettivi. Tale fenomeno è particolarmente importante nelle
zone tropicali in cui è maggiore il quantitativo di vapore d’acqua, soprattutto in
corrispondenza degli oceani, ossia nella cosiddetta zona di convergenza intertropicale:
ciò contribuisce a mantenere la circolazione generale atmosferica, bilanciandone le
perdite per attrito.
Su dimensioni della mesoscala, invece, anche alle medie latitudini ciò costituisce la
causa dei fenomeni temporaleschi, che possono produrre anche elevate precipitazioni. È
per questa ragione che il profilo verticale di densità di vapore d’acqua integrato sulla
colonna atmosferica è detto acqua precipitabile, la cui conoscenza permette di stimare
lo scambio di acqua fra superficie terrestre e atmosfera - il cosiddetto ciclo idrologico –
particolarmente importante in corrispondenza di mari e oceani, che coprono circa i due
terzi della superficie terrestre.
1 In maniera minore anche da parte di ozono, metano, ossido di azoto, aerosoli e clorofluorocarburi
(CFC).
Page 7
7
Il telerilevamento dell’atmosfera nelle microonde, ossia la regione di spettro
elettromagnetico a lunghezze d’onda centimetriche, millimetriche e sub-millimetriche, è
importante perché – come l’infrarosso termico – è indipendente dalla radiazione solare.
Un sensore a microonde è pertanto in grado di eseguire una misura anche di notte.
Inoltre, a differenza dell’infrarosso, le microonde riescono a penetrare le nubi: possono
essere effettuate misure in qualsiasi condizione meteorologica. Di conseguenza esse
rappresentano l’unico modo con cui eseguire misure dirette del contenuto di acqua
liquida nelle nubi e della pioggia, oltre che del contenuto atmosferico di vapore d’acqua
in presenza di nubi (per es. Janssen, 1993).
Lo studio dell’atmosfera nelle microonde da satellite permette inoltre di eseguire misure
globali, ossia di avere a disposizione misure relative anche a regioni altrimenti molto
difficilmente studiabili in maniera estensiva, come i mari e gli oceani che, come detto,
svolgono un ruolo di grande importanza.
2 Obiettivi della Tesi
Il lavoro svolto all'interno di questa Tesi è consistito innanzitutto nell'elaborazione di un
codice di trasferimento radiativo nelle microonde per osservazioni da satellite in doppia
polarizzazione, calibrato per un'atmosfera avente un profilo verticale di temperatura
lineare a tratti e un profilo verticale di densità di massa di vapore d'acqua
esponenzialmente decrescente. Le temperature di brillanza calcolate con tale codice
sono state confrontate con quelle ottenute mediante un codice di trasferimento radiativo
di letteratura (Evans & Stephens, 1991): si è così dimostrato la piena affidabilità del
codice sviluppato.
Si noti che, a differenza del codice di confronto, il codice elaborato ha la caratteristica
di poter essere utilizzato operativamente, per la determinazione dei parametri fisici
atmosferici (e/o terrestri), in funzione delle misure acquisite da satellite. In particolare si
è applicato tale codice, unitamente ad un modulo di inversione non lineare posto in
cascata, alla determinazione del contenuto colonnare atmosferico di vapore d'acqua,
facendo uso di osservazioni temporalmente quasi coincidenti dei radiometri SSM/I e
Page 8
8
TMI. A tale scopo, sono state elaborate nel corso del lavoro di Tesi, procedure in grado
di elaborare e georeferenziare i dati del radiometro TMI.
Le stime di acqua precipitabile determinate in corrispondenza della parte meridionale
del bacino del Mediterraneo, ottenute dai due diversi sensori, sono state confrontate tra
loro e infine comparate con stime empiriche prodotte dai dati SSM/I, utilizzando
algoritmi di letteratura (Alishouse et al., 1990; Schluessel & Emery, 1990). Le diverse
stime risultano essere molto ben correlate tra loro; i risultati ottenuti nel corso dello
svolgimento della Tesi sono stati inoltre presentati a congressi internazionali (Migliorini
et al., 1998; Migliorini et al., 1999; Nativi et al., 1998; Nativi et al., 1999).
Page 9
9
Capitolo 1
Radiometria a microonde
1 Introduzione
Il termine radiometria indica in generale la misura dell’intensità della radiazione
elettromagnetica proveniente da una sorgente. Il dispositivo che si utilizza per effettuare
tale misura è detto radiometro. Nella regione delle microonde, a cui si è interessati, i
radiometri fanno solitamente uso del principio detto supereterodina (o semplicemente
eterodina, essendo ormai superata la distinzione fra i due termini). Esso consiste nella
traslazione del segnale a radiofrequenza (RF) ricevuto, in uno a frequenza intermedia
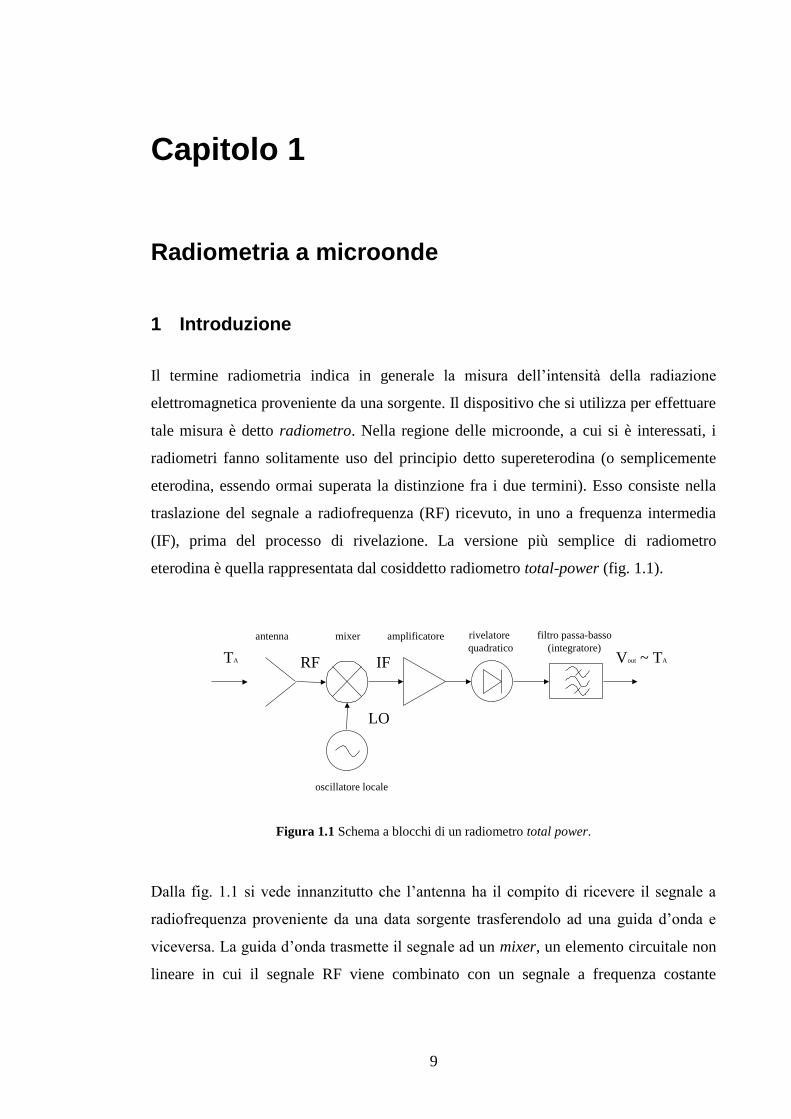
(IF), prima del processo di rivelazione. La versione più semplice di radiometro
eterodina è quella rappresentata dal cosiddetto radiometro total-power (fig. 1.1).
TA
antenna
RF
mixer
IF
LO
oscillatore locale
amplificatore rivelatore
quadratico
filtro passa-basso
(integratore)Vout ~ TA
Figura 1.1 Schema a blocchi di un radiometro total power.
Dalla fig. 1.1 si vede innanzitutto che l’antenna ha il compito di ricevere il segnale a
radiofrequenza proveniente da una data sorgente trasferendolo ad una guida d’onda e
viceversa. La guida d’onda trasmette il segnale ad un mixer, un elemento circuitale non
lineare in cui il segnale RF viene combinato con un segnale a frequenza costante
Page 10
10
generato da un oscillatore locale LO. Il mixer, a causa della sua non linearità, produce
due segnali a frequenze diverse, di cui una è data, per segnale di ingresso
monocromatico, dalla differenza fra il segnale RF e quello del LO. Tale segnale,
presente con una data ampiezza di banda anche nel caso non monocromatico, è detto
segnale a frequenza intermedia (IF). Tale segnale è molto più facilmente trattabile di
quello originario: viene infatti successivamente amplificato, fino ad arrivare al
rivelatore quadratico. Esso è tipicamente un diodo, fatto lavorare nella regione per cui
esso genera una corrente proporzionale al valore quadratico medio della tensione di
ingresso: si ha dunque proporzionalità fra tensione di uscita e potenza di ingresso. La
tensione di uscita è però caratterizzata da un rapporto segnale-rumore pari a uno, del
tutto insoddisfacente. Per tale motivo si utilizza in cascata un filtro passa basso (detto
integratore) che filtra dal segnale rivelato le fluttuazioni di tensione ad alta frequenza,
mediando la tensione rivelata su un intervallo di tempo , detto tempo di integrazione.
Si vuole ora introdurre brevemente alcuni concetti di interesse radiometrico.
2 Teoria delle antenne
Dalle equazioni di Maxwell, che riassumono varie leggi empiriche sui fenomeni
elettromagnetici, è possibile ricavare una legge di conservazione dell’energia che
stabilisce che la variazione di energia meccanica e elettromagnetica all’interno di un
volume V è uguale al flusso entrante di energia attraverso la superficie di V (per es.
Rybicki & Lightman, 1979). Se si suppone che i campi elettromagnetici siano
rappresentati da grandezze complesse che variano nel tempo come1 tje , si ha che il
vettore flusso elettromagnetico S, detto vettore di Poynting, mediato nel tempo è dato da
(in unità di Gauss)
)Re(8
HES
c (1.1)
1 Tale assunzione è del tutto generale in quanto è sempre possibile fare un’analisi di Fourier e trattare
ogni singolo componente separatamente
Page 11
11
dove E e H sono rispettivamente il campo elettrico e magnetico e dove c è la velocità
della luce nel vuoto. Un’antenna dunque trasmetterà e riceverà energia con distribuzione
spaziale determinata dal vettore di Poynting associato all’onda trasmessa o ricevuta.
Se si suppone di essere in un mezzo omogeneo, a una distanza r da un’antenna tale che
l’onda trasmessa possa essere ben approssimata da un’onda piana (regione di campo
lontano) si ha (per es. Jackson, 1975)
Er
B || r
(1.2)
con e rispettivamente costante dielettrica relativa e permittività del mezzo. I campi
sono cioè trasversali (ovvero perpendicolari) rispetto alla direzione di propagazione
dell’onda. Dalla (1.1) si ha inoltre che il modulo del vettore di Poynting mediato nel
tempo, coincidente con l’intensità I della radiazione - definita come l’energia
elettromagnetica alla frequenza per unità di superficie normale, di tempo e angolo
solido - è dato da
2
8|| E
cI
S (1.3)
Il campo elettromagnetico a grande distanza dipende dall’inverso della distanza r dalla
sorgente, in quanto il flusso del vettore di Poynting deve essere diverso da zero anche
per r che tende all’infinito. In coordinate sferiche si ha dunque
),(
),(
0
2
1
fr
eE
fr
eE
E
jkr
jkr
r
(1.4)
dove k = 2/ con lunghezza d'onda della radiazione.
Si definisce diagramma di radiazione F() dato da
Page 12
12
)|,(||),((|8
||),( 2
2
2
1
2
ff
cSrF (1.5)
e diagramma di radiazione normalizzato Fn() dato da F() con massimo
normalizzato a 1:
max),(
),(),(
F
FFn (1.6)
Un esempio di diagramma di radiazione normalizzato è riportato in fig. 1.2.
Figura 1.2 Diagramma di radiazione normalizzato di
un’apertura circolare illuminata uniformemente.
Si definisce inoltre p e M rispettivamente angolo solido del diagramma e angolo
solido del lobo principale, dati da
Page 13
13
principalelobo
nM
np
dF
dF
4
),(
),(
(1.7)
Si ha p
MM
detta efficienza del lobo principale. Se si definisce Aeff area efficace
dell’antenna, data da
AA aeff (1.8)
con A area fisica dell’antenna e a efficienza di apertura, si può infine dimostrare che
(per es. Ulaby et al., 1981)
p
effA
2
(1.9)
dove 1a nel caso ideale di illuminazione uniforme dell’antenna.
Dalla (1.9) si ha che il lobo principale diventa più direttivo all’aumentare dell’area
dell’apertura. Se per esempio si considera un lobo simmetrico per rotazione, con
ampiezza angolare del fascio a metà potenza (HPBW, dall’inglese half-power
beamwidth) HPBW e un’area fisica circolare di diametro D, si ha
444 ;
4
2
22 HPBWHPBW
paeff sinDA
(1.10)
e dunque
DMa
HPBW
41 rad (1.11)
Page 14
14
Per antenne utilizzate tipicamente nel telerilevamento a microonde si ha in genere una
relazione dell’ordine di (Janssen, 1993)
DHPBW
5.1 rad (1.12)
Per avere dunque un’ampiezza angolare a metà potenza di un grado a una frequenza di
30 GHz è necessario avere un’antenna di diametro pari a circa 86 cm.
2.1 Corrispondenza fra potenza e temperatura
Dalla definizione di intensità della radiazione e dalla (1.6) si può scrivere che la potenza
dP ricevuta da un’antenna nell’angolo solido infinitesimo alla frequenza , proveniente
da una sorgente di intensità ),( I è data da
ddFIAdP neff ),(),( (1.13)
Si ha dunque
B
neff ddFIAP
4
),(),( (1.14)
dove B è la banda passante del rivelatore. Se si pone l’antenna, supposta senza perdite,
all’interno di una cavità approssimabile ad un corpo nero alla temperatura T, essa
misura la potenza Pbb data da
B
neffbb ddFc
kTAP
4
2
2
),(2
(1.15)
Page 15
15
dove si è utilizzato l’approssimazione di Rayleigh-Jeans della curva di corpo nero. Se
all’interno della banda del rivelatore, il corpo nero si suppone costante in frequenza, si
ha
4
2
2
),(2
dFBc
kTAP neffbb (1.16)
Se si suppone infine che l’antenna stia misurando la potenza Pbb,p lungo una data
direzione di polarizzazione p, dalla (1.7) e dalla (1.9) si ha
kTBP pbb , (1.17)
La (1.17) afferma che c’è una relazione di proporzionalità fra la potenza misurata da
un’antenna e la temperatura di una sorgente assimilabile a un corpo nero.
2.2 Temperatura di antenna
Se si osserva una sorgente generica in polarizzazione p, si potrà sempre determinare una
temperatura TB,p tale che l’intensità incidente sull’antenna sia equivalente all’intensità di
un corpo nero alla temperatura TB,p:
)),((),( ,, pBp TBI (1.18)
Tale temperatura è detta temperatura di brillanza della sorgente. In questo caso la
(1.14) diventa
4
,,2
4
,, ),(),( ),(),(2
1dFTkB
AddFIAP pnpB
eff
B
pnpeffp (1.19)
Page 16
16
dove ),(, pnF è il diagramma di antenna in polarizzazione p. Se inoltre si definisce
temperatura di antenna pAT , la temperatura in polarizzazione p tale che BkTP pAp , ,
dalla (1.9) si ha
4
,
4
,,
,
),(
),(),(
dF
dFT
T
pn
pnpB
pA (1.20)
Se infine si definisce guadagno di antenna normalizzato in polarizzazione p la
grandezza
),(),( ,2
pn
eff
p FA
G (1.21)
si ha
4
,, ),(),( dGTT ppBpA (1.22)
Per un’antenna polarizzata linearmente si definiscono (per es. Kraus, 1966) due piani
principali, in genere passanti per = 90° (indicato con la lettera H’) e per = 0°
(indicato con la lettera V’), su cui vengono determinati i guadagni di antenna ),(' VG
e ),(' HG . Nelle applicazioni per telerilevamento della Terra si sceglie invece il piano
orizzontale e quello verticale locale, indicati rispettivamente con H e V. Se l’antenna
osserva la Terra con un angolo rispetto alla verticale terrestre, esprimendo il campo
elettrico nella (1.1) lungo i piani principali terrestri, dall’approssimazione di Rayleigh-
Jeans si ha
22
22
cos
cos
sinTTT
TsinTT
HVH
HVV
(1.23)
Page 17
17
e dalla (1.22)
22
22
cos
cos
HVH
HVV
GsinGG
sinGGG
(1.24)
3 Processo di misura radiometrica
In un radiometro total-power, la grandezza effettivamente misurabile è la tensione di
uscita Vout ai terminali del filtro passa-basso (o integratore). Essa è composta da una
componente continua outV , costante nel tempo e da una alternata. La prima componente
rappresenta effettivamente la misura, mentre la seconda determina la sensibilità del
radiometro (si veda il prossimo paragrafo). Se si assume che il radiometro possa essere
considerato lineare (ipotesi in genere ben verificata in pratica), si può scrivere
sysSsysdout TGGkBTCV (1.25)
dove Cd è la costante del rivelatore quadratico (in volt/watt), G è il guadagno totale del
radiometro, B è la banda passante di prerivelazione (ovvero quella dell’amplificatore IF)
e dove GkBCG dS è detto fattore di guadagno del radiometro, in volt/K.
Si definisce inoltre (per es. Ulaby et al., 1981) creAsys TTT temperatura di rumore
del sistema, dove AT è la temperatura di rumore dell’antenna, data dalla frazione di
temperatura d’antenna (1.22) non assorbita dall’antenna sotto forma di calore2, a cui è
sommato un termine di emissione termica dell’antenna stessa. creT è invece la
temperatura di rumore equivalente del sistema formato dalla linea di trasmissione e dal
ricevitore: è determinata dall’emissione termica della linea di trasmissione e di quella
del ricevitore. La temperatura di rumore di sistema rappresenta dunque in un radiometro
la temperatura della scena osservata dall’antenna, così come arriva ai terminali di
Page 18
18
ingresso del ricevitore, supposto ideale ovvero senza temperatura di rumore. Essa è
quindi la temperatura effettivamente misurata da un radiometro.
4 Sensibilità del radiometro
La sensibilità del radiometro è la deviazione standard dell’uscita del radiometro relativa
all’energia della radiazione incidente sull’apertura dell’antenna. Essa dunque determina
la più piccola variazione di energia misurabile, espressa solitamente in unità di
temperatura e indicata con T . Si può far vedere che per un radiometro total-power la
sensibilità è esprimibile come (per es. Ulaby et al., 1981)
22 )/()/1( SSsys GGBTT (1.26)
dove è il tempo di integrazione del radiometro e SS GG / è la fluttuazione media di
SG .
Per misurare in pratica la sensibilità, si osserva con il radiometro una sorgente di
calibrazione, a temperatura stabilizzata3. Ripetendo più volte tale misura si può
calcolare la deviazione standard delle varie misure, in volt: conoscendo SG nella (1.25)
e ricordando che la temperatura di sistema è linearmente correlata alla temperatura di
antenna, si determina la sensibilità in temperatura d’antenna T .
5 Calibrazione del radiometro
Il procedimento che correla la tensione misurata dal radiometro, alla temperatura di
antenna della sorgente di effettivo interesse è detto calibrazione del radiometro. Esso si
divide in due passi: il primo, detto di calibrazione del ricevitore, consiste nello stimare
2 Il rapporto r fra la potenza ricevuta ai terminali dell’antenna e la potenza incidente è detto efficienza di
radiazione. 3 Si ricordi però che dalla (1.26) segue che la sensibilità è funzione (lineare) della temperatura della scena
osservata.
Page 19
19
la temperatura di rumore d’antenna AT , il secondo, detto di calibrazione di antenna,
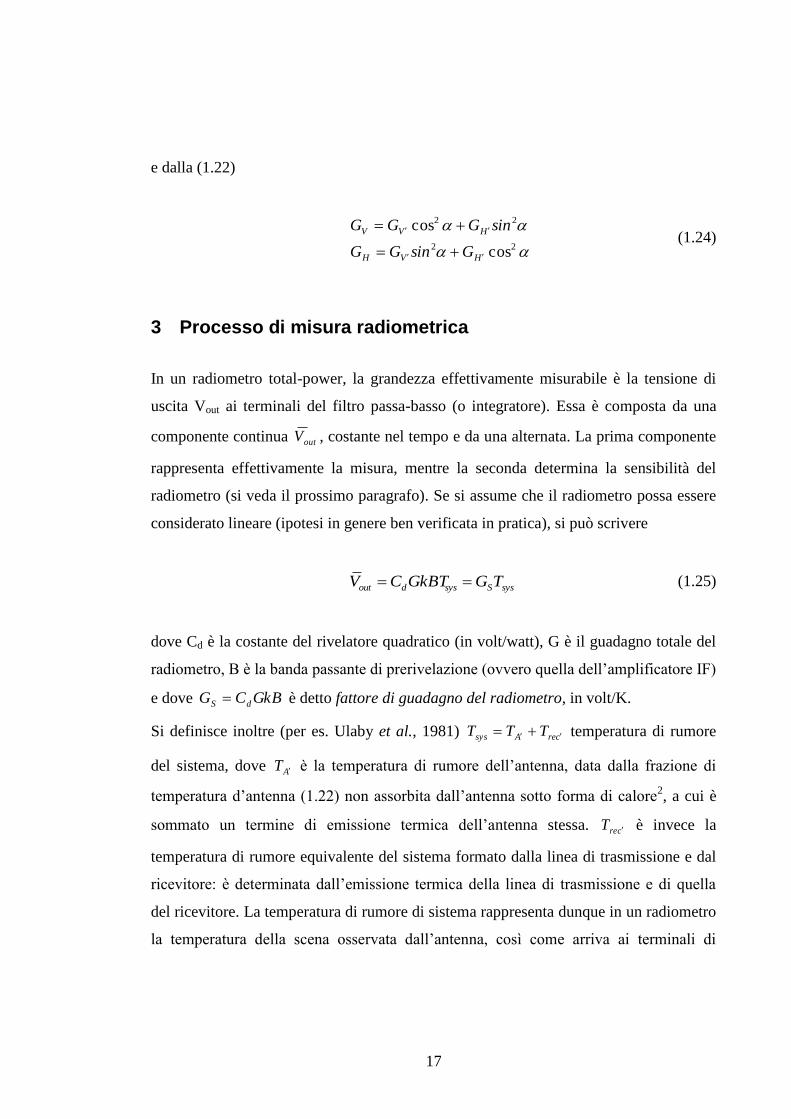
nella stima della temperatura di antenna AT vera e propria. Se riscriviamo la (1.25) nella
forma
)( creASout TTGV (1.27)
e supponiamo di osservare con il radiometro alternativamente due emettitori a
temperature differenti, entrambe supposte note, si ha (fig. 1.3)
CH
CHHC
cre
CH
CH
SVV
TVTVT
TT
VVG
; (1.28)
Figura 1.3 Calibrazione della temperatura di antenna con carico caldo e carico freddo.
dove si è indicato con VH e TH rispettivamente la tensione e la temperatura di rumore di
antenna dell’emettitore a temperatura più alta (detto carico caldo) e con VC e TC
rispettivamente la tensione e la temperatura di rumore di antenna dell’emettitore a
temperatura più bassa (detto carico freddo).
Il secondo passo consiste nel correlare la temperatura AT alla temperatura di antenna,
che, nota l’efficienza del lobo principale M , può infine essere messa in relazione alla
temperatura del lobo principale di antenna. Per ottenere ciò è necessario stimare
Page 20
20
l’efficienza di radiazione, l’efficienza del lobo principale, la temperatura fisica
dell’antenna e la temperatura dei lobi laterali di antenna. Attualmente esistono metodi
soddisfacenti per misurare sperimentalmente l’efficienza di radiazione; inoltre, dalla
conoscenza di Fn() su tutto l’angolo solido è possibile stimare M . La temperatura
dei lobi laterali di antenna è invece una quantità non misurabile in quanto il suo valore
dipende dalla radiazione che entra nei lobi laterali dell’antenna, dunque sempre diversa:
l’unico accorgimento possibile è cercare di eliminare tale contributo massimizzando
M . Ciò in generale produce un allargamento del lobo principale: si deve cercare un
compromesso fra risoluzione radiometrica e risoluzione spaziale.
6 Determinazione della temperatura di brillanza
La grandezza direttamente correlata ai parametri fisici della sorgente che si vuole
studiare è la temperatura di brillanza TB, definita precedentemente, correlata alla
temperatura di antenna tramite la (1.22). Essa è un’equazione integrale in cui la
temperatura di brillanza non è linearmente correlata alla temperatura di antenna. Per
trovare TB è dunque necessario invertire la relazione (1.22), noto il guadagno di antenna
normalizzato. A tale scopo in genere si fa uso di un modello fisico di temperatura di
brillanza, con cui si determina la temperatura di antenna per diverse condizioni fisiche
della scena. Si cerca poi di approssimare tali valori mediante una legge del tipo (per es.
Wentz, 1991)
SLppBppA TQTQT ,0,, )( (1.29)
determinando così Qp e Q0, dove è il coseno dell’angolo di vista della direzione di
puntamento dell’antenna rispetto alla verticale e SLT è un modello di temperatura di
brillanza entrante dai lobi laterali dell’antenna (nel caso di radiometro su satellite sarà
data dalla temperatura del fondo cosmico). Si ha quindi
Page 21
21
p
SLppA
pBQ
TQTT
,0,
, )(
(1.30)
Si noti che la (1.30) rappresenta la quantità direttamente confrontabile con la
temperatura di brillanza ottenuta da modello fisico dell’emissione della sorgente
studiata. Per determinare l’errore sulla determinazione della temperatura di brillanza,
detto errore di calibrazione assoluta BT si fa in genere ricorso a confronti con misure
effettuate tramite radiometri diversi, anch’essi calibrati, in condizioni di misura più
possibile equivalenti: la differenza media delle misure rappresenta l’errore commesso.
7 Radiometri a microonde su satellite
I dati sperimentali necessari per determinare - con le modalità che saranno chiare in
seguito – i parametri geofisici di interesse, nel caso presente consistono nelle
temperature di brillanza misurate da un radiometro a bordo di un satellite, relative a una
determinata banda nella regione delle microonde e di polarizzazione data.
I sensori a microonde su satellite sono in genere di due tipi (per es. Grody, 1993):
panoramici (indicati con il termine inglese imagers) e spettrometrici (indicati con il
termine inglese sounders). La suddivisione in queste due classi non è rigida ma si può in
genere affermare che i primi privilegiano la risoluzione spaziale per la determinazione
di caratteristiche della superficie terrestre o dell’atmosfera, mentre i secondi hanno in
genere bande spettrali che analizzano il profilo di una intensa riga atmosferica per
determinare profili atmosferici. Entrambi i tipi di sensori utilizzano antenne a scansione,
per aumentare la copertura della scena. La scansione può essere perpendicolare alla
traccia (cross-track scanning) o conica (conical scanning). Nel primo caso è possibile
osservare anche in direzione del nadir: ciò può essere utile per minimizzare l’effetto
dell’atmosfera e per trascurare, nel caso di osservazioni per esempio del mare calmo,
l’effetto della polarizzazione. Il principale vantaggio della scansione conica è invece che
l’angolo di osservazione rispetto alla verticale è approssimativamente costante.
Il primo radiometro a microonde montato su satellite è stato ospitato a bordo del
satellite sovietico Cosmos-243 nel 1968 e successivamente sul Cosmos-384 nel 1970.
Page 22
22
Tale strumento era puntato in direzione del nadir e aveva quattro canali, con frequenze
comprese fra 3.5 e 37.0 GHz. Il primo radiometro imager a microonde su satellite
statunitense è stato l’EMSR (Electrically Scanning Microwave Radiometer), lanciato
nel 1972 a bordo del satellite Nimbus-5. Esso era un radiometro a cross-track scanning
centrato a 19.35 GHz. Il primo sounder è stato invece il NEMS (Nimbus-E Microwave
Spectrometer), ospitato anch’esso sul Nimbus-5 nel 1972 (la lettera E sta infatti per il
corrispondente numero d’ordine alfabetico 5). Esso aveva due canali nella riga 22.2
GHz del vapore d’acqua e nella finestra a 31.4 GHz, oltre a tre canali nella banda
dell’ossigeno, fra 50 e 60 GHz, con vista nadirale. Nel 1975 è stato poi lanciato il
satellite Nimbus-6 con a bordo EMSR, con il canale centrato stavolta a 37 GHz e, per la
prima volta, con scansione conica e in doppia polarizzazione. Sempre sul Nimbus-6 era
ospitato inoltre SCAMS (SCAnning Microwave Spectrometer), con canali simili a quelli
di NEMS ma stavolta in modalità cross-track scanning. I risultati ottenuti con questi
due sensori hanno contribuito alla realizzazione da parte della NOAA (National
Oceanic and Atmospheric Administration), di una versione operativa di SCAMS detta
MSU (Microwave Sounding Unit), con quattro canali fra 50 e 60 GHz cross-track,
lanciato a bordo TIROS-N a partire dal 1978.
Nel 1978 è stata anche la volta di SMMR (Scanning Multichannel Microwave
Radiometer) ospitato a bordo dei satelliti SEASAT e Nimbus-7, con cinque canali fra
6.6 e 37 GHz in doppia polarizzazione e scansione conica. Nel 1979 è stato poi
sviluppato SSM/T (Special Sensor Microwave/Temperature) lanciato a partire dal 1979
da parte del DMSP (Defense Meteorological Satellite Program), a bordo dei satelliti Air
Force Block 5D e caratterizzato da avere sette canali nella finestra 50-60 GHz. Una
versione più recente di tale strumento, detta SSM/T2, con canali a 90, 150 GHz e
intorno alla riga a 183 GHz del vapore d’acqua, è stata lanciata dal DMSP a partire dal
1991.
Gli strumenti le cui misure sono state utilizzate nella presente Tesi sono i due più
recenti radiometri panoramici lanciati: SSM/I (Special Sensor Microwave/Imager) e
TMI (TRMM Microwave Imager), che analizzeremo con maggior dettaglio.
Page 23
23
7.1 Il sensore SSM/I
Il sensore SSM/I (Hollinger et al., 1990) fa parte dei radiometri sviluppati per il DMSP
ed ha volato a bordo del satellite Air Force Block 5D-2 F8 nel 1987, ed è tuttora attivo
sui satelliti F13 e F14 dello stesso gruppo. Tali satelliti volano su un’orbita circolare
eliosincrona quasi polare, ad una altezza di circa 833 km, con un’inclinazione di 98.8°
ed un periodo orbitale di 102.0 minuti. Esso compie 14.1 orbite complete al giorno e il
nodo ascendente sull’equatore è raggiunto alle 6:13 ora locale. Esso compie una
scansione conica, la cui parte attiva copre un’estensione (detta swath) di circa 1400 km
(fig. 1.4) che permette una copertura quasi completa del globo terrestre nelle 24 ore.
L’SSM/I è un sistema radiometrico total-power a sette canali e quattro frequenze,
linearmente polarizzato. I canali a 19.35, 37.0 e 85.5 GHz sono polarizzati sia
orizzontalmente sia verticalmente, mentre quello a 22.235 GHz è polarizzato soltanto
verticalmente. L’SSM/I è composto da un riflettore parabolico di dimensioni 61 x 66
cm, illuminato da una antenna di tipo feed-horn a sette porte. Il riflettore e l’antenna
sono montati su un tamburo che contiene i radiometri, il sottosistema dati digitali, il
sottosistema di scansione meccanica e il sottosistema di potenza. Il tamburo viene
ruotato intorno al suo asse per permettere al sistema radiometrico di eseguire una
scansione conica. Uno specchio e un carico caldo di riferimento sono invece solidali col
satellite e posizionati in modo da occultare il feed-horn nella parte non attiva di ciascuna
scansione. Lo specchio ha la funzione di riflettere la radiazione cosmica di fondo a 2.7
K, utilizzata come carico freddo. In questo modo si può produrre una calibrazione
assoluta ad ogni scansione.
L’SSM/I ruota con un periodo di 1.9 s, durante i quali il punto sotto il satellite si sposta
di 12.5 km, pari circa alla risoluzione spaziale a terra dei canali a 85.5 GHz. In ciascuna
scansione vengono acquisiti 128 misure a 85.5 GHz uniformemente spaziate, per
un’apertura angolare totale di 102.4°. L’intervallo di ciascuno dei 128 campionamenti è
di 4.2 ms, pari al tempo necessario al fascio per spostarsi di 12.5 km cross-track. Le
misure alle altre frequenze vengono eseguite una volta ogni due scansioni: quando si
misurano tutti i canali si parla di scansione A, mentre quando si acquisisce soltanto il
canale ad alta frequenza si parla di scansione B. I tempi di integrazione dei canali a
bassa frequenza sono scelti in modo da raggiungere il massimo tempo di integrazione
Page 24
24
mantenendo fasci concentrici per ciascun canale: è stato scelto un intervallo di
campionamento di 8.44 ms che produce 64 campionamenti. Da tali considerazioni
risulta chiaro che la risoluzione spaziale dell’antenna effettiva sarà data da quella reale
(detta IFOV, Istantaneous Field Of View) tenendo però conto dello spostamento
dell’antenna durante il tempo di integrazione. Tale grandezza è detta EFOV (Effective
Field Of View) e sarà significativamente maggiore dell’IFOV nella direzione cross-
track, mentre sarà sostanzialmente uguale nella direzione di moto del satellite (direzione
along-track) (tab. 1.1).
HPBW [deg] EFOV a terra [km]
Frequenza
Canale
[GHz]
Pol. V/H Banda
passante
IF (MHz)
Along-track
IFOV
Cross-track
IFOV
Cross-track
EFOV
Along-
track
Cross-
track
19.35 V 240 1.86 1.87 1.93 69 43
19.35 H 240 1.88 1.87 1.93 69 43
22.235 V 240 1.60 1.65 1.83 60 40
37.0 V 900 1.00 1.10 1.27 37 28
37.0 H 900 1.00 1.10 1.31 37 29
85.5 V 1400 0.41 0.43 0.60 15 13
85.5 H 1400 0.42 0.45 0.60 15 13
Tabella 1.1 Caratteristiche di antenna dell’SSM/I (da Hollinger et al., 1990).
La direzione di puntamento dell’antenna (fig. 1.4) forma un angolo di 45° rispetto al
nadir, da cui risulta un angolo di 53.1° rispetto alla verticale terrestre, sostanzialmente
costante a causa della scansione conica. Si noti che nel corso della presente Tesi, il
coseno di tale angolo sarà indicato con la lettera : si ha 6.0)1.53cos(/ ISSM .
La sensibilità radiometrica, definita dalla (1.26), è stimata essere dell’ordine di 1 K,
mentre l’errore di calibrazione assoluta BT è dell’ordine di 3 K per ciascun canale.
Tale errore è da intendersi come l’incertezza sulla temperatura di brillanza misurata dal
radiometro.
Page 25
25
Figura 1.4 Geometria di acquisizione del sensore SSM/I (da Hollinger et al., 1987)
7.1.1 I dati di temperatura di brillanza SSM/I
I dati relativi al satellite considerato (per es. F13 o F14) sono distribuiti alla comunità
scientifica dal GHRC (Global Hydrology Resource Center) di Huntsville, Alabama
(USA). È innanzitutto necessario esaminare l’immagine relativa all’insieme dei
passaggi su tutta la Terra per il giorno di interesse, allo scopo di stabilire se la copertura
comprenda la regione che si vuole studiare (fig. 1.5). In caso affermativo si formula la
richiesta al GHRC per l’insieme dei passaggi relativi al dato giorno, specificando
l’interesse per il passaggio ascendente o discendente. I dati relativi alla temperatura di
brillanza nei vari canali che si ricevono sono composti dai dati veri e propri, in formato
HDF (Hierarchical Data Format) e da informazioni sulla georeferenziazione.
Page 26
26
Figura 1.5 Immagine relativa ai passaggi del giorno 6 Settembre 1999 del sensore SSM/I, canale a
22.235 GHz in polarizzazione verticale.
7.2 Il sensore TMI
Il radiometro TMI è uno degli strumenti che fanno parte del carico scientifico del
satellite TRMM (Tropical Rainfall Measuring Mission), sviluppato congiuntamente
dalla NASA e dall’Agenzia Spaziale Giapponese NASDA, lanciato nel 1997. Gli
obiettivi di tale missione sono quelli di misurare la precipitazione e lo scambio di
energia (ossia di calore latente di condensazione) nelle regioni tropicali e subtropicali. Il
satellite descrive un’orbita circolare di altezza pari a 350 km, con un’inclinazione di
35°. Il radiometro TMI è in configurazione total-power, composto da nove canali ed è
basato sull’SSM/I. Le principali differenze sono l’aggiunta di una coppia di canali a
10.7 GHz in polarizzazione verticale e orizzontale e il cambiamento di frequenza del
canale del vapore d’acqua da 22.235 GHz a 21.3 GHz. Tale cambiamento è stato fatto
allo scopo di evitare saturazioni nella parte tropicale dell’orbita del satellite. In tabella
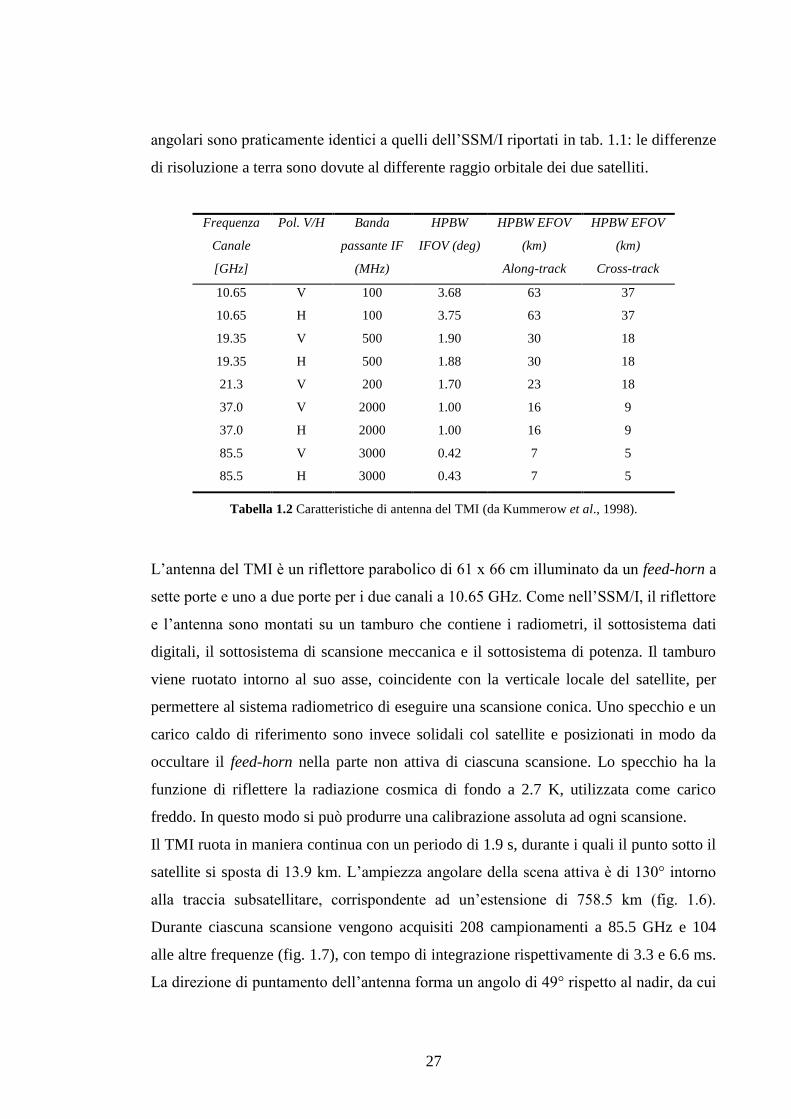
1.2 sono state riportate le caratteristiche dei nove canali del TMI. Si noti che gli IFOV
Page 27
27
angolari sono praticamente identici a quelli dell’SSM/I riportati in tab. 1.1: le differenze
di risoluzione a terra sono dovute al differente raggio orbitale dei due satelliti.
Frequenza
Canale
[GHz]
Pol. V/H Banda
passante IF
(MHz)
HPBW
IFOV (deg)
HPBW EFOV
(km)
Along-track
HPBW EFOV
(km)
Cross-track
10.65 V 100 3.68 63 37
10.65 H 100 3.75 63 37
19.35 V 500 1.90 30 18
19.35 H 500 1.88 30 18
21.3 V 200 1.70 23 18
37.0 V 2000 1.00 16 9
37.0 H 2000 1.00 16 9
85.5 V 3000 0.42 7 5
85.5 H 3000 0.43 7 5
Tabella 1.2 Caratteristiche di antenna del TMI (da Kummerow et al., 1998).
L’antenna del TMI è un riflettore parabolico di 61 x 66 cm illuminato da un feed-horn a
sette porte e uno a due porte per i due canali a 10.65 GHz. Come nell’SSM/I, il riflettore
e l’antenna sono montati su un tamburo che contiene i radiometri, il sottosistema dati
digitali, il sottosistema di scansione meccanica e il sottosistema di potenza. Il tamburo
viene ruotato intorno al suo asse, coincidente con la verticale locale del satellite, per
permettere al sistema radiometrico di eseguire una scansione conica. Uno specchio e un
carico caldo di riferimento sono invece solidali col satellite e posizionati in modo da
occultare il feed-horn nella parte non attiva di ciascuna scansione. Lo specchio ha la
funzione di riflettere la radiazione cosmica di fondo a 2.7 K, utilizzata come carico
freddo. In questo modo si può produrre una calibrazione assoluta ad ogni scansione.
Il TMI ruota in maniera continua con un periodo di 1.9 s, durante i quali il punto sotto il
satellite si sposta di 13.9 km. L’ampiezza angolare della scena attiva è di 130° intorno
alla traccia subsatellitare, corrispondente ad un’estensione di 758.5 km (fig. 1.6).
Durante ciascuna scansione vengono acquisiti 208 campionamenti a 85.5 GHz e 104
alle altre frequenze (fig. 1.7), con tempo di integrazione rispettivamente di 3.3 e 6.6 ms.
La direzione di puntamento dell’antenna forma un angolo di 49° rispetto al nadir, da cui
Page 28
28
risulta un angolo di 52.8° rispetto alla verticale terrestre ( 6.0)8.52cos( TMI ). La
sensibilità radiometrica è per i vari canali è compresa fra 0.83 e 1.34 K e l’errore di
calibrazione assoluta è stimato essere pari a 2 K (Peirce, 1993): 2 TMI
BT K.
Figura 1.6 Geometria della scansione del TMI (da Peirce, 1993).
5 km
14 km
10.65 GHz
19.35 GHz
21.3 GHz
37.0 GHz
85.5 GHz
Figura 1.7 Proiezione a terra dei campionamenti TMI intorno alla traccia subsatellite.
Page 29
29
7.2.1 I dati di temperatura di brillanza TMI
L’elaborazione in tempo reale dei dati scientifici del TRMM è svolta dal TSDIS
(TRMM Science Data and Information System) all’interno del GSFC (Goddard Space
Flight Center). Esso infatti riceve i dati grezzi in tempo quasi reale e si occupa di
produrre i dati strumentali calibrati (detti prodotti di livello 1B). Per quanto riguarda il
TMI essi consistono nelle temperature di brillanza e sono chiamati prodotti di livello
1B-11. Tali dati, come anche gli altri dati scientifici del TRMM, sono distribuiti al
pubblico dal Goddard DAAC (Distributed Active Archive Center). I dati sono suddivisi
in granuli, che contengono le scansioni relative ad un orbita del satellite, a sua volta
definita come l’intervallo di tempo fra due passaggi del satellite alla latitudine più bassa.
Tale tempo è in media pari a 91.5 minuti, duranti i quali il TMI esegue in media 2891
scansioni. Per ordinare i dati è dunque necessario osservare l’immagine relativa ai
passaggi del satellite per il giorno considerato e determinare il numero dell’orbita (che
identifica il granulo) a cui si è interessati (fig. 1.8).
Figura 1.8 Immagine relativa ai passaggi del giorno 6 Settembre 1999 del sensore TMI.
Page 30
30
Capitolo 2
Trasferimento radiativo in atmosfera
1 Radiazione non polarizzata
L’energia incidente nell’unità di tempo sulla superficie d nel punto P, nella direzione
alla frequenza (fig. 2.1) è data da (per es. Chandrasekhar, 1960)
d d d cos)t,(P,Idt
dE
(2.1)
d
d
P
Figura 2.1 Definizione delle grandezze correlate all'intensità della radiazione elettromagnetica.
dove )t,(P,I
è detta intensità del campo di radiazione.
Page 31
31
Nel seguito si supporrà di essere in condizioni stazionarie, omettendo dunque l’esplicita
dipendenza dal tempo t. L’intensità del campo di radiazione che attraversa un mezzo
materiale di spessore ds subisce una diminuzione pari a
dsIdI (2.2)
dove è detto coefficiente di estinzione (o semplicemente estinzione).
Tale diminuzione può avvenire tramite assorbimento o tramite scattering (diffusione).
Nel primo caso si ha una trasformazione dell’energia del campo elettromagnetico in un
altra forma di energia (per esempio in energia cinetica degli atomi del mezzo materiale)
o in energia e.m. a diversa frequenza, nel secondo caso si ha invece una diminuzione
dell’intensità dovuta alla deviazione del fascio rispetto alla direzione considerata1.
Se si suppone di essere in presenza del solo scattering ()(s
), tutta l’energia
dt
),(dE
s incidente su d proveniente dalla direzione
alla frequenza nell'unità di
tempo, viene diffusa su tutto l’angolo solido dall’elemento di volume dV ed è pari a
d d dV I
d d d cos I dsdt
dE ds
)(
)()(
s
ss
(2.3)
dove si è posto (fig. 2.2)
ds d cos=dV (2.4)
1 Si suppone di considerare soltanto scattering elastico, ovvero scattering che non modifica la frequenza
del fascio diffuso rispetto a quella del fascio incidente (al contrario di quanto avviene per esempio nello
scattering Raman).
Page 32
32
’
d’
d
I
d
ds
Figura 2.2 Geometria dello scattering.
Se si introduce )p(cos detta funzione di fase tale che
1d )p(cos4
1
4
(2.5)
si ha che l’energia diffusa da dV nell’unità di tempo, nella direzione
e nell’angolo
solido infinitesimo
d è data da
d d dV 4
d )p(cos )(P,I )(
s (2.6)
In generale si può porre
0
)(cosP =)p(cos
l
ll (2.7)
Page 33
33
dove lP è il polinomio di Legendre di ordine l e dove 0
4
P4
1ll d
, con 00 l
tranne che per l = 0.
Si avrà pertanto 10 per la condizione di normalizzazione. Nei casi pratici lo
sviluppo in serie di Legendre viene troncato dopo un numero finito di termini.
Si definisce j coefficiente di emissione, tale che l’energia emessa da un volume dV in
d d dt è data da
dt d d dV j (2.8)
In presenza di scattering ((s)jj ) si ha che l'energia totale diffusa nella direzione
,
proveniente da una qualsiasi direzione
è pari a
4
(s)(s)
4
d ),p( )P,(Idt d d dV =dt d d dV j (2.9)
e dunque
d ),p( )P,(I 4
j
4
(s)
(s)
(2.10)
Se si ha soltanto questo contributo si parla di atmosfera di scattering. Il caso opposto è
rappresentato dalla condizione di equilibrio termodinamico locale, in cui si può porre
((a)jj )
)T(B j )(
a (2.11)
dove (T)B è la funzione di Planck alla temperatura T data da
Page 34
34
1
12)(
/2
3
kThec
hTB
(2.12)
Da quanto detto in precedenza segue che la variazione nella direzione
dell’intensità
del campo di radiazione dovuta all’interazione con la materia in un volume dV di
spessore ds è data da
j + I
ds
dI (2.13)
Tale espressione viene detta equazione del trasporto radiativo.
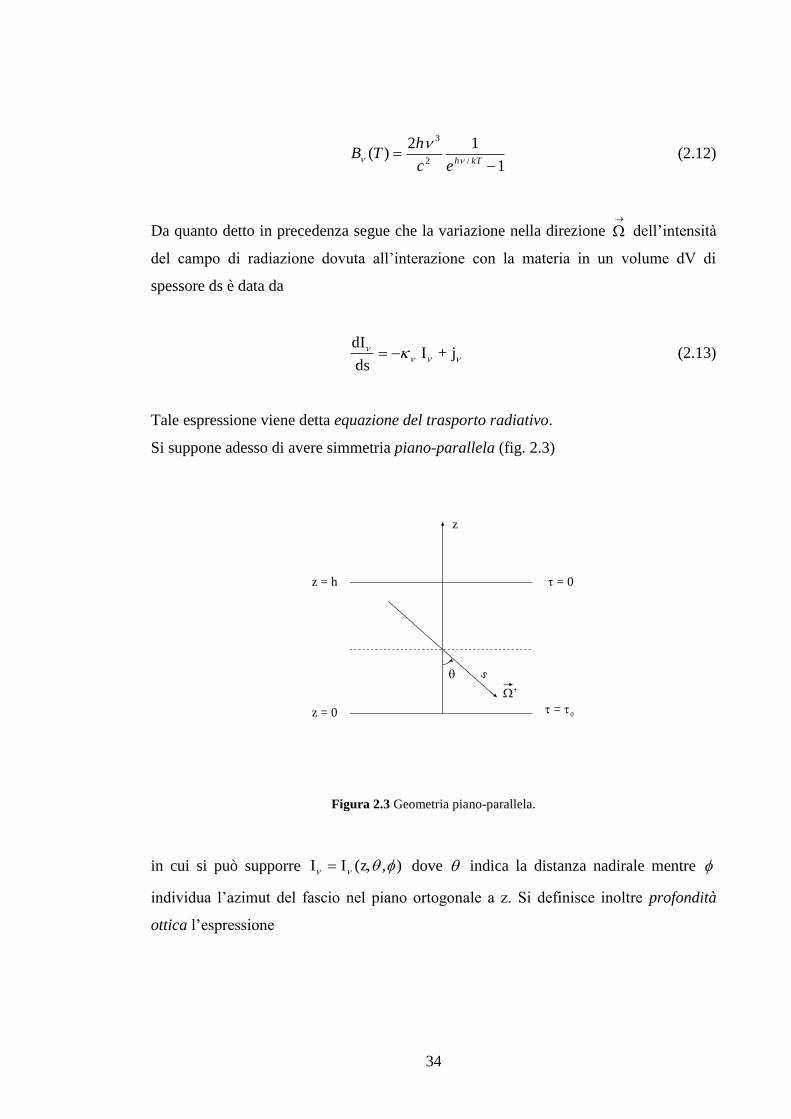
Si suppone adesso di avere simmetria piano-parallela (fig. 2.3)
= 0
= 0
z
z = h
z = 0
’
s
Figura 2.3 Geometria piano-parallela.
in cui si può supporre ),z,(II dove indica la distanza nadirale mentre
individua l’azimut del fascio nel piano ortogonale a z. Si definisce inoltre profondità
ottica l’espressione
Page 35
35
z
dz (2.14)
in cui si è posto all’infinito l’estremo superiore dell’integrale, dato che per z > h (altezza
dell’atmosfera) il coefficiente di assorbimento è zero.
Se si pone inoltre =cos si ha ),,(II e l’equazione del trasporto lungo s
(equazione 2.13) diventa
S + I d
dI
j + I dz
dI
(2.15)
dove
jS è detta funzione sorgente.
In simmetria piano-parallela l’equazione del trasporto in atmosfera, in presenza di
emissione termica e di scattering, è data da ()()( as
)
2
0
1
1-
2
0
1
1-
)(
)(
T)(B)1( + d d ),,,p( ),,(I4
+ ),,(Id
),,(dI
T)(B + d d ),,,p( ),,z(I4
),,z(Ids
),,z(dI a
s
(2.16)
dove
)(
)()(
)(
s
as
s
(2.17)
è detta albedo di singolo scattering.
Page 36
36
Si suppone ora di essere in presenza anche di una sorgente solare. Il flusso della
radiazione solare FSole fuori dall'atmosfera è dato da
0
2sin )( )( SoleSoleSoleSole TBTBF (2.18)
dove con TSole si è indicato la temperatura di brillanza del Sole alla frequenza
considerata, con Sole l'angolo solido sotto cui il Sole è visto dalla Terra e con 0
l'angolo sotteso dal raggio solare (la cui lunghezza dipende dalla frequenza) quando
visto dalla Terra. Per poter trattare tale caso in geometria piano-parallela si suppone che
tale sorgente sia di tipo puntiforme, la cui radiazione incida cioè sul piano atmosferico
orizzontale provenendo esclusivamente dalla direzione 0
relativa al centro del Sole. In
questo caso la funzione di fase diventa
)()(),,,(),,,( 00 pp (2.19)
dove 0 , 0 individuano la posizione del Sole e dove si è introdotto la funzione di
Dirac. Tramite la (2.2), la (2.18) scritta alla profondità ottica diventa
0esin )( ),( 0
2
0
SoleSole TBF (2.20)
e ricordando la (2.10), dalla (2.20) si ha
),,,p( e 4
)sin(
d d )-( )-( ),,,(p4
e )sin( ),,(j
00
-)(
0
2
00
2
0
1
1
)(-
0
2(Sole)
0
0
s
Sole
s
Sole
TB
TB
(2.21)
L’equazione (2.16) diventa dunque
Page 37
37
2
0
1
1-
),,( + d d ),,,p( ),,(I4
+ ),,(Id
),,(dI
(2.22)
dove
),,,p( e )sin(4
+ T)(B)1(),,( 00
-
0
2 0
SoleTB (2.23)
2 Radiazione polarizzata
Si consideri adesso il caso in cui si abbia radiazione polarizzata, come ad esempio
avviene in presenza di scattering. Nel caso ideale di onda piana monocromatica i vettori
campo elettrico, magnetico e vettore d’onda formano una terna ortogonale: i vettori
campo elettrico e magnetico giacciono dunque su un piano, ortogonale alla direzione di
propagazione, detto piano di polarizzazione, su cui essi descrivono due ellissi di
polarizzazione sfasate di 90 gradi. È dunque sufficiente considerare soltanto il
comportamento per esempio del vettore campo elettrico. Se nel piano di polarizzazione
si individua una direzione di riferimento le
e una ortogonale associata re
, la direzione
di propagazione e le
individuano un piano, detto piano di riferimento; si ha (fig. 2.4)
) - t cos( E=)e Re(=t)(E
) - t cos( E=)e Re(=t)(E
ti
ti
rrrr
llll
E
E (2.24)
dove l,r
l,rl,r
ie E
E . Se si indica con l’angolo la cui tangente è data dal rapporto fra il
semiasse maggiore e il semiasse minore dell’ellisse di polarizzazione (22
) si
ha
Page 38
38
tsin cos E=t)(E
tcos sin E=t)(E
0
0
r
l
(2.25)
da cui, per 0 , segue
t)sin cos cos + t cos sin (sin E)t(E
t)sin sin cos - t cos cos (sin Et)(E
0
0
r
l (2.26)
Uguagliando la (2.26) alla (2.24) e combinando opportunamente i risultati si trovano le
seguenti relazioni:
re
re
le
le
Figura 2.4 Ellisse di polarizzazione
V=sin2 Ek )sin( EEk 2)i(k
U=2sin cos2 Ek )cos( EEk 2)+(k
Q2 cos cos2 Ek )E(Ek )(k
IkE)E(Ek )+(k
2
0
2
0
2
0
22
2
0
22
rlrllrrl
rlrllrrl
rlrrll
rlrrll
EEEE
EEEE
EEEE
EEEE
(2.27)
dove k è una costante che dipende dal sistema di unità di misura usato. I, Q, U, V sono
detti parametri di Stokes, definiti rispetto al piano di riferimento scelto e correlati dalla
relazione
Page 39
39
2222 VU+QI (2.28)
Per ottenere la legge di trasformazione dei parametri di Stokes dovuta alla rotazione del
piano di riferimento è sufficiente supporre, in base alle convenzioni precedentemente
adottate (fig. 2.4), di ruotare la direzione le
di un angolo i. Se dunque si riscrivono le
(2.27) con i (rotazione in senso antiorario) si ottiene:
V=V
U2 cos Q 2sin =U
U2sin Q 2 cos=Q
I=I
ii
ii (2.29)
Come si è accennato in precedenza, il concetto di radiazione monocromatica è una pura
astrazione matematica. La radiazione infatti si presenta sotto forma di pacchetti d’onda
con ampiezza di banda finita e dispersa su un angolo solido finito: è però sempre
possibile considerare un pacchetto d’onda con dispersione angolare e ampiezza di banda
infinitesime (onda quasi-monocromatica). In questo caso si può far vedere che ancora
possibile definire un piano di polarizzazione e un’ellisse di polarizzazione i cui
parametri variano lentamente nel tempo, ovvero su tempi scala molto maggiori
dell’inverso della frequenza centrale del pacchetto. Se si ridefiniscono i parametri di
Stokes introducendovi opportune medie temporali2 si ha in generale
2222 VU+Q I (2.30)
L’uguaglianza vale quando una delle due componenti del campo elettrico è
identicamente nulla o quando il rapporto fra le ampiezze e la differenza delle fasi è
costante nel tempo: in questo caso si parla di onda totalmente polarizzata. Se invece le
componenti hanno la stessa media temporale e differenza di fase casuale si ha
2 D’ora in avanti quando si parlerà di parametri di Stokes si intenderà fare riferimento alla corrispondente
definizione valida per onde quasi-monocromatiche.
Page 40
40
0=V=U=Q (2.31)
e si parla di onda totalmente non polarizzata. Si definisce grado di polarizzazione
l’espressione
I
V + U+ Q 222
p (2.32)
con 10 p . Dalla definizione dei parametri di Stokes si può far vedere che i
parametri di Stokes di due fasci incoerenti (ovvero con differenza di fase casuale) sono
dati dalla somma dei rispettivi parametri. Ricordando la (2.30) dunque si ha
V
U
Q
V + U+ Q
+
0
0
0
V + U+ Q - I
V
U
Q
I 222222
(2.33)
si può cioè sempre supporre che la radiazione considerata sia composta dalla somma
incoerente di un fascio totalmente non polarizzato e uno totalmente polarizzato, i cui
parametri dell’ellisse di polarizzazione sono dati da
222 V + U+ Q
V2sin
Q
U=2 tg
(2.34)
Dalla definizione di segue che per 2
,0
si ha polarizzazione lineare: dalla
(2.34) e dalla definizione dei parametri di Stokes si ha
Page 41
41
pol. linI U+ Q=I
0=V
22 (2.35)
mentre per 4
si ha polarizzazione circolare, con
..I=V =I
0=U=Q
circpol (2.36)
2.1 Trasporto di radiazione polarizzata
Considerando l’intensità unitamente alla polarizzazione, l’equazione del trasporto (2.13)
diventa
jI
I +
ds
d (2.37)
dove si ha I = ( I, Q, U, V)T e dove
0
0
0
1
),( e4
)sin( +
0
0
0
1
T)(B )-(1 + d )P,( ),( 4
00
2
4
(s)
0 PIPj
SoleTB
(2.38)
)(cos),(
PP è una matrice 4x4, detta matrice di fase, in cui per definizione
l’elemento 11P coincide con la funzione di fase ed è pertanto normalizzato su tutto
l'angolo solido. Il contributo al coefficiente di emissione (2.38) dovuto allo scattering
del fascio proveniente dalla direzione
è dato da
d )P,( ),( 4
(s)
IP . Il piano
Page 42
42
di riferimento su cui è naturale definire tale contributo e )P,(
I è il piano dello
scattering: nel seguito si supporrà implicitamente tale scelta.
z
y
x
2i
1i
Figura 2.5 Geometria di definizione della matrice di fase.
In simmetria piano-parallela il piano di riferimento naturale su cui definire i parametri
di Stokes del fascio è il piano meridiano (locale), definito come il piano passante per
una data direzione
e la verticale locale. Per scrivere l’equazione del trasporto nel
caso di simmetria piano-parallela è dunque innanzitutto necessario ruotare il piano di
riferimento della radiazione incidente di un angolo pari all’angolo compreso fra il piano
meridiano e il piano dello scattering considerato. La radiazione diffusa avrà, come si è
visto, come piano di riferimento il piano dello scattering: esso dovrà dunque essere
ruotato fino a farlo coincidere con il piano meridiano. Con riferimento alla (fig. 2.5) e
ricordando la (2.29), la matrice di fase in simmetria piano-parallela è data da
)( ) (cos )(),,,( 12 ii LPLM (2.39)
dove
Page 43
43
sin
cos sin ) cos( sin cos cos
sin
cos sin ) cos( sin cos cos
) cos( sin sin + cos cos = cos
1000
02 cos2sin 0
02sin 2 cos0
0001
)(
2
1
-i
-i
-
ii
iiiL
(2.40)
L’equazione del trasporto in simmetria piano-parallela prende dunque la forma
2
0
1
1-
),,( + d d ),,( ),,,(4
+ ),,(d
),,(d IMI
I
(2.41)
dove
0
0
0
1
),,,( e4
)sin( +
0
0
0
1
T)(B )-(1 =),,( 000
2 0
MSoleTB
(2.42)
È importante notare fin d’ora che nella (2.41) l’unico termine che non ha simmetria
assiale rispetto alla verticale è il contributo solare3. In assenza di tale termine la
radiazione è simmetrica per rotazione intorno all’asse z e per riflessione rispetto a un
piano passante per l’asse z. Essa dunque è necessariamente polarizzata linearmente sul
piano meridiano ( 0= ,2
= ; 2
= ,0
) o sul piano orizzontale
3 Infatti la matrice di fase M dipende da i1 e i2 che a loro volta dipendono da ’- (oltre che dalle
rispettive distanze nadirali).
Page 44
44
(2
= ,2
= ; 0 ,0
Dalle (2.27) si ha dunque U = V = 0: il campo di
radiazione è individuato unicamente da I e Q o alternativamente dalle intensità lungo la
direzione di riferimento e da quella ortogonale associata, date da
2
QIEk I
2
Q+I=Ek I 22
rrll (2.43)
2.2 La matrice di fase
Per determinare la radiazione in una direzione data tramite l’equazione del trasporto è
dunque necessario conoscere l’espressione della matrice di fase P definita in
precedenza. In particolare si è visto che essa correla linearmente la radiazione diffusa a
quella incidente: in termini di campo elettrico in notazione complessa si potrà dunque
scrivere
r
l
rrrl
lrll
s
r
s
l
E
E
E
E
SS
SS
)(
)(
(2.44)
dove )(
,
s
rlE è l’ampiezza complessa a grande distanza (far-field) del campo elettrico
diffuso. Dalla (2.44) e dalle (2.27) scritte per la radiazione diffusa si trova
V )SS+SS Im( U)SS+SRe(S +
+ Q )SSS+S(2
1 + I )SS+S+S(
2
1III
V )SIm(S U)SRe(SI SI SI
V )SIm(S U)SRe(SI SI SI
22222222))(
22)
22
rrrllrllrlrrlrll
lrrrrllllrrlrrll
(s
r
(s)
l
s
rlrrrlrrlrlrrr
(s
r
lrlllrllrlrlll
(s)
l
Page 45
45
V )SSSRe(S
+ U)SSSIm(S + Q )SSSIm(S + I )SSSIm(S V
V )SSSIm(S
+ U)SSSRe(S + Q )SSSRe(S + I )SSSS Re(=U
V )SS+SS Im( U)SSSRe(S +
+ Q )SSSS(2
1 + I )SSSS(
2
1IIQ
)(
)(
22222222))(
rllrrrll
rllrrrllrrlrrlllrrlrrlll
s
rllrrrll
rllrrrllrrlrrlllrrlrrlll
s
rrrllrllrlrrlrll
rlrrlrlllrrlrrll
(s
r
(s)
l
s
(2.45)
Si può dunque scrivere FII )(s , dove
)SSSRe(S )SSSIm(S)SSSIm(S)SSSIm(S
)SSSIm(S )SSSRe(S)SSSRe(S )SSSS Re(
)SS+SS Im( )SSSRe(S )2
|S| 2
|S| +2
|S| 2
|S| (
2
1)
2|S|
2|S|
2|S|
2|S| (
2
1
)SS+SS Im( )SS+SRe(S)2
|S| 2
|S| 2
|S| +2
|S| (2
1)
2|S|
2|S| +
2|S| +
2|S| (
2
1
=
rllrrrllrllrrrllrrlrrlllrrlrrlll
rllrrrllrllrrrllrrlrrlllrrlrrlll
rrrllrllrlrrlrllrlrrlrlllrrlrrll
rrrllrllrlrrlrlllrrrrllllrrlrrll
F
(2.46)
Per radiazione incidente non polarizzata, ricordando la (2.31), si può dunque scrivere
IFI 11
)( s . Se si definisce P = F/c tale che 1d P4
1
4
11
si ha che P11 rappresenta la
probabilità di avere diffusione di radiazione non polarizzata in una data direzione: P11
coincide con la funzione di fase p(cos) definita dalla (2.5). P è dunque l'estensione per
radiazione polarizzata del concetto di funzione di fase visto in precedenza per
radiazione non polarizzata. L'intensità della radiazione è proporzionale al modulo
quadro del campo elettrico: il rapporto (s) fra l'energia diffusa - per unità di tempo, di
frequenza e di angolo solido, raccolta da una superficie sferica di raggio r centrata sulla
particella - e l'intensità incidente sulla particella è data da
)(I
)(I
4
2)(
)(
drs
s (2.47)
Page 46
46
detta sezione d'urto di scattering, avente le dimensioni di una superficie.
Dalle relazioni precedenti si può infine scrivere
2
)(
4
)(
4
114
d I 4
1d F
4
1
rIc
ss
(2.48)
e quindi
FP)(
24
s
r
(2.49)
Si è studiato lo scattering dovuto a particelle contenute in un volumetto dV. Si suppone
ora che fra le radiazioni diffuse con un dato angolo di scattering, da parte di particelle
diverse all’interno di dV non vi sia una relazione di fase determinata: ipotesi di
scattering indipendente. Questa ipotesi è certamente verificata se i centri diffusori sono
disposti in maniera casuale all’interno del volumetto. In questo caso il coefficiente di
scattering può essere espresso nella forma )(
)( n s
s : è cioè proporzionale alla
concentrazione n delle particelle in dV, con costante di proporzionalità data dalla
sezione d’urto di scattering. I parametri di Stokes della radiazione diffusa possono
invece, come si è visto, essere interpretati come la somma incoerente dei parametri di
Stokes della radiazione diffusa dalla singola particella in dV. Se nel volumetto sono
presenti particelle di diversa forma o orientazione, ciascuna di esse avrà in generale la
sua propria concentrazione ni e matrice di fase Pi. In questo caso il contributo al
coefficiente di emissione potrà essere scritto come
i
iii d )n(4
1
IP (2.50)
Per un dato scattering si è visto che la matrice di fase ha in generale 16 elementi. Se
però si suppone che in dV le particelle di ciascuna specie siano orientate in maniera
casuale, per ogni scattering in una data direzione dovuto a una particella con una data
Page 47
47
orientazione ne esisterà un altro dovuto a una particella orientata a 180° rispetto alla
bisettrice di . Dato che le corrispondenti matrici di fase hanno tra loro una
relazione determinata, si può dimostrare che la matrice di fase risultante dalla somma
delle due matrici ha solo 10 parametri indipendenti. Se inoltre le particelle hanno un
piano di simmetria la matrice di fase risulta della forma
64
43
52
21
PP00
PP00
00PP
00PP
P (2.51)
Se infine le particelle sono sferiche, per simmetria si ha che le componenti del campo
elettrico diffuso (s)
lE e (s)
rE non possono essere ruotate nel piano di polarizzazione in
conseguenza dello scattering: nella (42) si ha dunque Slr = Srl = 0 e la (2.51) diventa
della forma
34
43
12
21
PP00
PP00
00PP
00PP
P (2.52)
3 Scattering Rayleigh
Se la dimensione lineare d della particella scatterante è tale che |m|d << / 2 dove m =
nr + ini è l’indice di rifrazione complesso della particella di forma arbitraria si parla di
scattering Rayleigh. Il significato fisico di tale condizione consiste nel fatto che la
particella deve essere piccola rispetto alla lunghezza d'onda della radiazione incidente
sia dentro che fuori la particella. In tal modo si può sia considerare omogeneo il campo
elettrico esterno, sia supporre che il momento di dipolo p indotto sulla particella da
quest'ultimo si stabilisca in un tempo molto più breve del periodo dell'onda. In questo
caso si può scrivere
Page 48
48
E
p (2.53)
dove E
è il campo elettrico esterno incidente sulla particella e dove è detta tensore di
polarizzabilità. Il fatto che la polarizzabilità sia un tensore implica che la direzione di p
e di E
in generale non coincidano, tranne nel caso in cui la radiazione incidente sia
polarizzata linearmente nella direzione di uno dei tre autovettori di .
Se si indicano con 1n
, 2n
e 3n
gli autovettori di si può nel caso generale scrivere
312111
321
332211
n n n
nnn
n n n
321
EEE
EEEE
nml
nnn
p
(2.54)
dove l, m e n indicano i parametri direttori del vettore campo elettrico rispetto a
ciascuno degli autovettori di .
Ad una distanza r >> il campo elettrico complesso diffuso nella direzione )(s
si
esprime come
)()(ikr2
)(
(s) ) p ( r
e k)(r,
sss
E (2.55)
il cui modulo è pari a
sin r
e ikr2)( pks E (2.56)
dove è l'angolo compreso fra p ed E(s)
.
Dalle (2.47), (2.53) e (2.56) si ha
Page 49
49
24
0
3
2
24
)( ||3
8sin2
kdE
pks (2.57)
detta sezione d'urto di scattering Rayleigh, dove 2
3
22
2
22
1
22 |||||||| nml .
Si noti che dalla (2.57) consegue che la sezione d'urto dipende dall'orientazione di E
rispetto alla particella: per particelle dello stesso tipo orientate a caso si avrà
)|||||(|3
1|||||||| 2
3
2
2
2
1
2
3
22
2
22
1
22 nml (2.58)
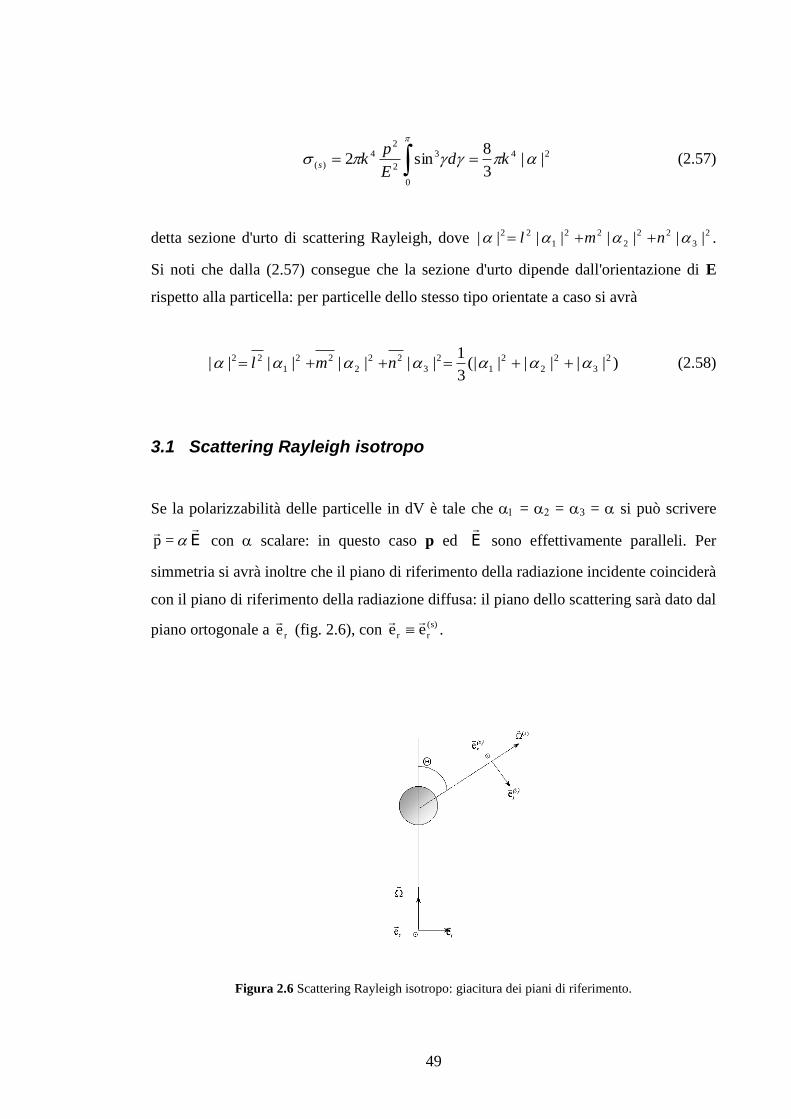
3.1 Scattering Rayleigh isotropo
Se la polarizzabilità delle particelle in dV è tale che = = 3 = si può scrivere
E
=p con scalare: in questo caso p ed E
sono effettivamente paralleli. Per
simmetria si avrà inoltre che il piano di riferimento della radiazione incidente coinciderà
con il piano di riferimento della radiazione diffusa: il piano dello scattering sarà dato dal
piano ortogonale a re
(fig. 2.6), con (s)
rr ee
.
Figura 2.6 Scattering Rayleigh isotropo: giacitura dei piani di riferimento.
Page 50
50
Dalla (2.55) si ha
)()()(ikr
2
)()(ikr2
)()(ikr2
)(
(s)
eecos)ee)(sin(r
e k
))ee(( r
e k ) (
r
e k)(r,
s
rr
s
ll
s
lrrl
s
rrll
ssss
EEEE
EEEE
(2.59)
Dalla (2.44) si può anche scrivere
r
l
s
r
s
l
E
E
E
E
10
0cos
r
ek
ikr2
)(
)(
(2.60)
Dalla (2.46) si ha che l'elemento F11 è dato da
)1(cos||2
kF 22
2
4
11 r
(2.61)
Dalla (2.49), (2.52) e dalla (2.57) si trova
cos2
3000
0 cos2
300
00)1(cos4
3)1(cos
4
3
00)1(cos4
3)1(cos
4
3
22
22
P (2.62)
Per radiazione incidente non polarizzata si ha dunque
Page 51
51
)(I)1(cos4
3
4)(IF),(Q
)(I)1(cos4
3
4)(IF),(I
2
2
)(
21
)(
2
2
)(
11
)(
rr
rr
ss
ss
(2.63)
da cui (fig. 2.7)
)(I 1) (cos4
3
4II),(I
)(I 4
)(I2
FF
2
QI),(I
)(I cos4
3
4)(I
2
FF
2
QI),(I
2
2
)()()((s)
2
)(1211
(s)(s))(
2
2
)(1211
(s)(s))(
rr
rr
rr
ss
r
s
l
ss
r
ss
l
(2.64)
2
)(
8 r
s
2
)(
4 r
s
2
)(
8
3
r
s
30
210
60
240
90
270
120
300
150
330
180 0
Il(s)
Ir(s)
I(s)
)( s
Figura 2.7 Funzione di fase per scattering Rayleigh isotropo per campo elettrico diffuso
parallelo al piano del disegno (in rosso), perpendicolare (in blu) e totale (in nero).
Si vuole adesso calcolare la sezione d’urto di estinzione per scattering Rayleigh
isotropo, dato dalla somma della sezione d’urto di scattering e di quella di assorbimento.
Quest’ultima è in generale correlata alla diminuzione dell’intensità incidente sulla
Page 52
52
particella, nella direzione stessa di incidenza ( = 0). In tale direzione non si può
distinguere fisicamente la radiazione incidente da quella diffusa: si ha interferenza fra le
due onde.
Se si considera un punto (x,y) del piano ortogonale alla direzione dell’onda incidente e
diffusa in avanti a distanza z dalla particella scatterante, il campo elettrico non assorbito
)0(res)( E - supposto per il momento scalare - consisterà a grande distanza in un’onda
sferica di ampiezza inversamente proporzionale alla distanza 222 zyxr . Dalle
(2.44) e (2.60) si ha Sll(0) = Srr(0) S(0) e Slr (0) = Srl(0) = 0; si può scrivere
EEEr
e (0)S= S(0))0(
ikrres)( (2.65)
con, per definizione, ikrerSS )0()0( .
Per z2 >> x
2 + y
2 (regione di Fresnel) e = 0 si ha
(res)2z
)y(xik
ikz22(res)(tot) II) )e
z
e(0)S Re( 2 + 1 (|=||| )r(I
22
EEE (2.66)
dove I(res)
è l’intensità non assorbita dalla particella, data da
)ez
e(0)S Re( 2 )r(I 2z
)y(xik
ikz(res)
22
.
L'energia per unità di tempo, frequenza e angolo solido W(res)
incidente sulla superficie
perpendicolare a z, a distanza r, sarà data dall’integrale di I(res)
su tutto il piano.
Ricordando che vale
k
zi 2=dydx e 2z
)y(xik
22
(2.67)
a meno di un fattore di fase si ha
Page 53
53
I=I (0))SIm(k
4W (a))ass(
(2.68)
dove
(0))SIm(k
4)(
a (2.69)
è per definizione la sezione d’urto di assorbimento. La radiazione che oltrepassa la
particella nella direzione di incidenza subisce dunque una dissipazione sia a causa
dell'assorbimento sia a causa dello scattering in avanti. Si può quindi definire una
sezione d’urto di estinzione data dalla somma della sezione d’urto di assorbimento e di
quella di scattering.
Per scattering dovuto a particelle sferiche (scattering isotropo), per simmetria si può
dimostrare che nella (2.44) si ha Slr = Srl = 0 e che per diffusione in avanti si ha inoltre
Sll(0) = Srr(0). Per scattering isotropo l’assorbimento dunque non dipende dalla
polarizzazione della radiazione incidente: valgono i risultati trovati nella trattazione
precedente4 e in particolare la (2.69).
Per scattering Rayleigh isotropo, dalla (2.60) si ha
Imk 4
ke
rS(0)=(0)S
)(
2
ikr
a
(2.70)
Si noti che per reale l’estinzione è data soltanto dal termine di scattering.
Per particelle sferiche si ha (p.es. van de Hulst, 1981) 3
2
2
a 2m
1m
dove, al solito, m è
l’indice di rifrazione complesso della particella sferica di raggio a. Dalla (2.70) e dalla
(2.57) si ha
4 Nel caso più generale si dovrà tenere conto del fatto che la polarizzabilità è un tensore e introdurre
conseguentemente una matrice di assorbimento.
Page 54
54
(s)(a)(ext)
2
23)(
6
2
2
24)(
2m
1m Im ka 4
a 2m
1mk
3
8
a
s
(2.71)
4 Scattering di Mie
Quando non sono verificate le condizioni di applicabilità dello scattering Rayleigh e si è
in presenza di diffusori sferici omogenei, si deve ricorrere alla teoria della diffusione
sviluppata per la prima volta da Mie nel 1908. In questo caso, per simmetria si dimostra
che la (2.44) si può scrivere come
r
l
rr
ll
s
r
s
l
E
E
E
E
S0
0S
)(
)(
(2.72)
dove (p.es. Hansen & Travis, 1974)
ikr
e)cos(a+)cos(b
1)+n(n
1+2nS
ikr
e)cos(b+)cos(a
1)+n(n
1+2nS
ikr
nnnn
1=n
ikr
nnnn
1=n
rr
ll
(2.73)
con an e bn complesse5, funzioni di m e
a2, e dove
dcos
)(cosdsin)cos( cos)(cos
dcos
)(cosd)(cos
n2
nn
nn
P
(2.74)
5 Possono essere calcolate per mezzo di una procedura iterativa (p. es. Ulaby et al., 1981)
Page 55
55
con Pn polinomio di Legendre di ordine n.
Dalla (2.47) e dall’ortogonalità di n e n su tutto l’angolo solido si può far vedere che
1=n
2
n
2
n2
s)( |b||a|1)+(2nk
2 (2.75)
mentre dalle (2.69), (2.73) e (2.74) e dalla relazione
1)+(nn 2
1)1()1( nn (2.76)
si ha
(s)(ext))(
nn
1=n
2
(ext) baRe 1+2nk
2
a
(2.77)
Si noti che nella trattazione di Mie la (2.77) assume il significato di sezione d’urto di
estinzione mentre nella trattazione di Rayleigh soltanto quella di sezione d'urto di
assorbimento. Il motivo di questa apparente incongruenza è che nell'approssimazione di
Rayleigh si è implicitamente trascurato l'effetto del campo elettrico prodotto dal dipolo
indotto – la cosiddetta radiazione di reazione – che tiene conto del contributo della
sezione d'urto di scattering.
Ricordando la (2.46), la (2.49) e la (2.72) si ha che la matrice di fase P potrà infine
essere scritta nella forma (2.52), con
)S(S Imr4
P)S(S Rer4
P
)|S| |S(|r2
P)|S| |S(|r2
P
(s)
2
4
(s)
2
3
22
(s)
2
2
22
(s)
2
1
rrllrrll
rrllrrll
(2.78)
Page 56
56
5 Il caso del telerilevamento passivo da satellite a microonde
Si vuole adesso applicare i concetti e il formalismo visti in precedenza al caso
particolare che ci interessa in questa sede, ovvero il telerilevamento passivo da satellite
nella regione spettrale delle microonde (fig. 2.8), che coprono la banda di frequenza
compresa fra 3 GHz e 3 THz.
Figura 2.8 La banda spettrale delle microonde.
Si fa innanzitutto, come in precedenza, l'ipotesi di essere in geometria piano-parallela: si
suppone cioè che le disomogeneità all'interno della cella di risoluzione del satellite
relativa a una data altezza in atmosfera (o a terra per altezza zero) siano trascurabili, in
modo da poterne considerare la media. Si considera inoltre, come in precedenza, il
trasporto di radiazione monocromatica: tale ipotesi è ragionevole in quanto, come si
vedrà, le variazioni del coefficiente di scattering e di assorbimento in funzione della
frequenza sono dolci in rapporto alla banda spettrale tipica di un radiometro a
microonde (dell'ordine di 1 GHz).
Si vuole ora discutere l'importanza dello scattering nel trasferimento radiativo a
microonde. Per fare ciò, è necessario conoscere la costante dielettrica complessa delle
particelle di acqua e ghiaccio che possono essere presenti in atmosfera.
Page 57
57
5.1 Costante dielettrica complessa dell'acqua pura e del ghiaccio
Il calcolo della costante dielettrica complessa di una sostanza omogenea e isotropa è
stato svolto per la prima volta da Debye (1929). Tale lavoro è stato proseguito da molti
altri autori, tra i quali – per il caso dell'acqua pura – Stogryn (1971) e Klein & Swift
(1977). Da tali lavori si può scrivere
2
0
0
0
2
0
0
)/(1)/(1
jj (2.79)
dove è la costante dielettrica ad alta frequenza, 0 quella statica e 0 la frequenza di
rilassamento, corrispondente al massimo della parte immaginaria di . Per quanto
riguarda l'acqua pura, più recentemente sono state proposte espressioni di che fanno
uso di un modello di Debye doppio, ovvero con due frequenze di rilassamento. Nella
presente tesi si è utilizzato l'espressione di Liebe et al. (1989), ricavata tramite un
adattamento a valori misurati, per frequenze fino a 1 THz, data da
22
21
2
10
2
21
2
10
)/(1)/(1
)/(1)/(1
sp
sspp (2.80)
dove p e s sono rispettivamente la frequenza di rilassamento principale e secondaria e
con
51.3
48.5
)1(3.10366.77
GHz )1(1500590
GHz )1(294)1(14209.20
)(/300
2
1
0
2
s
p
KT
(2.81)
Page 58
58
Come si vede dalla (2.81), entrambe le frequenze di rilassamento cadono nelle
microonde. Per quanto riguarda il ghiaccio invece la frequenza di rilassamento è 7.23
kHz a 0° C e decresce a 3.5 kHz a –66° C (Auty & Cole, 1952). Se dunque si suppone
di considerare l'espressione della costante dielettrica relativa del ghiaccio nelle
microonde, la (2.79) si scrive come
)( 0
0
j (2.82)
dove 15.3 indipendente dalla temperatura e 5.910 a 0° C (Auty & Cole,
1952). In realtà, da misure sperimentali si vede che la (2.82) non riesce a spiegare il
comportamento in frequenza di '' del ghiaccio oltre qualche gigahertz, il cui valore
tende ad aumentare, probabilmente a causa del contributo dell'assorbimento del ghiaccio
nell'infrarosso (Evans, 1965). Una espressione recente che tiene conto in modo
completo della dipendenza di del ghiaccio dalla frequenza e dalla temperatura è per
esempio quella di Liebe et al., (1991), data da
)(15.3
ba
j (2.83)
con
)(/300
103.133.6
/993.01
233.0
)1.220.17exp()171.0(
5
2
KT
b
a
(2.84)
In fig. 2.9 è presentato l'andamento della costante dielettrica complessa dell'acqua e del
ghiaccio, in funzione della frequenza.
Page 59
59
10-1
100
101
102
103
100
101
102
frequenza [GHz]
' acq
ua
10-1
100
101
102
103
100
101
102
frequenza [GHz]
" acq
ua
10-1
100
101
102
103
100
101
102
frequenza [GHz]
' gh
iaccio
10-1
100
101
102
103
10-4
10-3
10-2
10-1
frequenza [GHz]
" gh
iaccio
Figura 2.9 Costante dielettrica complessa dell'acqua liquida pura a 20° C e del ghiaccio puro a 0° C.
5.2 Importanza dello scattering a microonde
Si suppone ora di considerare lo scattering dovuto a goccioline d'acqua o di ghiaccio
sospese in atmosfera, dovute esclusivamente a foschia, nebbia e nubi: si esclude quindi
la presenza della pioggia. Sotto questa ipotesi la dimensione delle goccioline, supposte
sferiche, è generalmente inferiore a 50 micron (p.es. Liebe, 1989). Si è dunque in
generale in condizioni di scattering isotropo o di Mie, a meno che non sia verificata la
condizione di Rayleigh 2/|| rm dove, come in precedenza, m è l'indice di
rifrazione complesso della goccia, r il raggio e la lunghezza d'onda della radiazione
incidente. Come si vede in (fig. 2.10), per r < 50 m e frequenza < 100 GHz si ha
1||2
||
m
rm : è possibile considerare in questo caso l'approssimazione di
Rayleigh.
Page 60
60
Figura 2.10 Parametro di scattering per acqua pura e ghiaccio.
L'espressione dell'albedo di singolo scattering per scattering di Rayleigh isotropo si può
scrivere come
)()(
)()(
)()(
)(
/1
/
as
as
as
s
(2.85)
dove, dalle (2.71) si ha
)Im(
||
3
2
23
)(
)(
K
Ka
s
(2.86)
con 2
1
2m
1m2
2
K , dove, al solito, è la costante dielettrica complessa relativa
della goccia. In fig (2.11) si è riportato il caso dell'acqua liquida a 280 K e del ghiaccio
a 273.15 K per un intervallo di raggi di gocce tipico delle nubi. Da tale figura si vede
che nelle condizioni supposte è possibile trascurare la presenza dello scattering nei
fenomeni di trasferimento radiativo a microonde in atmosfera. Si ricorda che tale
Page 61
61
affermazione vale in assenza di pioggia: le gocce di pioggia infatti hanno un diametro
molto maggiore delle goccioline d'acqua liquida e dei cristalli di ghiaccio che
costituiscono le nubi. Tale dimensione dipende dalla locazione geografica del
fenomeno, dal tipo di pioggia (stratiforme o convettiva), dalla stagione e dalla posizione
della cella di pioggia all'interno dell'evento (per es. Doviak & Zrnic, 1993), ma è
generalmente inferiore o uguale a 5 mm. In ogni caso si può far vedere (per es. Bauer &
Schlussel, 1993) che in presenza di pioggia non è più in generale a microonde
applicabile l'approssimazione di Rayleigh e che l'albedo di singolo scattering tende a
diventare dell'ordine dell'unità all'aumentare della frequenza (fig 2.12).
Figura 2.11 Albedo di singolo scattering per acqua e ghiaccio.
Si ha inoltre che la temperatura di brillanza alla sommità dell'atmosfera aumenta in
funzione del tasso di pioggia su mare e raggiunge la saturazione già a partire da alcuni
mm/h (per es. Kummerow & Weinmann, 1988): in presenza di pioggia, l'affidabilità
delle stime di altri parametri atmosferici è dunque molto ridotta. Pertanto, nella presente
Tesi si supporrà sempre di essere in assenza di pioggia: conseguentemente si potrà
trascurare l'effetto dello scattering.
Page 62
62
Figura 2.12 Albedo di singolo scattering per gocce di pioggia (da Bauer & Schluessel, 1993).
5.3 Soluzione formale dell'equazione del trasporto radiativo
Se si suppone di essere in geometria piano-parallela e se la sorgente solare è trascurabile
si è visto che gli unici parametri di Stokes non nulli sono I e Q. Dalla (2.23) si ha che il
contributo solare dipende dall'albedo di singolo scattering: in assenza di pioggia si può
trascurare. Se si fa inoltre l'ipotesi di essere in condizioni di equilibrio termodinamico
locale, la (2.41) e la (2.42) possono essere scritte come
T)( ),(d
),(d
BI
I (2.87)
con
Q
II e
0
1B . Moltiplicando ambo i membri della (2.87) per il fattore
e
si ottiene
eed
dBI
),( (2.88)
Page 63
63
Integrando la (2.88) fra 0 e si ottiene l'intensità entrante nell'atmosfera ),(
I
mentre integrando fra e 0 si trova l'intensità uscente dall'atmosfera ),(
I , date da
de ))T((e),(),(
de ))T((e),0(),(
00
0
0
BII
BII
(2.89)
dove ' è, per l'intensità entrante, un punto compreso fra 0 e mentre per l'intensità
uscente, un punto compreso fra e 0. Si suppone ora di avere come limite
dell'atmosfera in = 0 una superficie di tipo speculare, ovvero caratterizzata da
riflessione di Fresnel, come per esempio il mare calmo. Sotto tale ipotesi si può scrivere
),( )1(),( 0s0 IeI (2.90)
dove s1 e è detta matrice di riflessione di Fresnel ed se matrice di emissione di
Fresnel. Inserendo la (2.90) nelle (2.89) si ha che l'intensità uscente dalla sommità
dell'atmosfera ),0(
I alla frequenza e distanza zenitale è data da
000
e)T( )( + )(e )1( + e ),0( )1(),0( Ss,,s
2
s
BeIIeIeI skysky
(2.91)
dove
d
e ))T(( )(
de ))T(( )(
0
0 0
0
,
0
,
BI
BI
sky
sky
(2.92)
Page 64
64
sono l'intensità dovuta all'emissione termica del cielo rispettivamente uscente ed
entrante dall'intera atmosfera sotto l'angolo , mentre TS indica la temperatura assoluta
della superficie speculare. Il termine ),0(
I rappresenta invece l'intensità entrante
nella sommità dell'atmosfera sotto l'angolo . Tale termine comprende sicuramente la
cosiddetta intensità del fondo cosmico, molto ben approssimabile alla radiazione di un
corpo nero a 2.7 K. Esso comprende inoltre l'intensità di eventuali sorgenti che
emettano nella direzione individuata dall'angolo , come ad esempio il Sole.
Ricordando la (2.18) si ha )sin(T 0
2
SoleSole BF dove a 10 GHz 0 = 0.293° e TSole
= 2 104 K (p. es Aarons, 1965). Il fatto però che tale flusso provenga solo da una
regione limitata di cielo fa sì che, per riflessione speculare, tale termine sia presente solo
per angoli di vista uguali alla distanza zenitale del Sole. In questo caso, a causa della sua
intensità, esso coprirebbe il segnale dei parametri geofisici di interesse: per riflessione
speculare si suppone in generale assente.
La (2.91) rappresenta, per quanto visto, la soluzione dell'equazione del trasporto
radiativo in atmosfera, adatta – relativamente alle ipotesi assunte – per essere applicata
al telerilevamento della Terra da satellite (fig. 2.13).
Figura 2.13 Contributi emissivi misurati da un radiometro su satellite per osservazione della Terra.
Page 65
65
5.4 La matrice di riflessione di Fresnel: applicazione al mare calmo
Si suppone d'ora in avanti di considerare una precisa direzione di polarizzazione di
riferimento, ovvero la direzione della verticale (locale), indicata con la lettera V: la
direzione ortogonale associata giacerà dunque sul piano orizzontale e sarà indicata dalla
lettera H. Dalla (2.43) si ha
2
QIII
2
Q+I=II HV
rl (2.93)
Con questa convenzione (universalmente accettata nella regione delle microonde) si può
far vedere (per es. Tsang et al., 1985) che la matrice di riflessione di Fresnel è data da
)rRe(r)rIm(r00
)rIm(r)rRe(r00
00|r|0
000|r|
= )(1
*
hv
*
hv
*
hv
*
hv
2
h
2
v
se (2.94)
che per U = V = 0 diventa
|r|0
0|r|= )(1
2
h
2
v
s
e (2.95)
dove
2
2
2
2
v
1
1 |r|
(2.96a)
2
2
2
2
h
1
1 |r|
(2.96b)
Page 66
66
con swswsw i costante dielettrica relativa complessa del mezzo riflettente, in
questo caso dell'acqua di mare. Essa si può scrivere come
2
0
)2(1 sw
swsw
swsw
0
2
0
2)2(1
)(2ion
sw
swswsw
sw
(2.97)
con 9.4sw limite ottico (ovvero ad alta frequenza) della costante dielettrica
dell'acqua salata, identico a quello dell'acqua pura (Stogryn, 1971),
-112
0 Fm 10854.8 costante dielettrica del vuoto. La costante dielettrica statica
dell'acqua salata è invece data da
)10232.410210.310656.310613.10.1(
)10491.210276.110949.1134.87(),(
372535
34221
0
SSSTS
TTTSTsw
(2.98)
con T temperatura dell'acqua in gradi centigradi e S salinità dell'acqua in ‰ o p.s.u.
(practical salinity unit). Il tempo di rilassamento in secondi sw si esprime come
)10105.110760.710638.710282.20.1(
)10096.510938.610824.3101109.1(2
1),(
382645
3162141210
SSSTS
TTTSTsw
(2.99)
mentre la conducibilità ionica dell'acqua salata in 11 m è data da
)]}10551.210551.210849.1(10464.210266.1
10033.2[exp{)10282.110093.2104619.118252.0(
2875264
237253
S
SSSSion
(2.100)
con T 25 .
Un andamento tipico della costante dielettrica complessa dell'acqua di mare in funzione
della frequenza nelle microonde è riportato in fig 2.14. Introducendo nelle (2.96)
l'espressione della costante dielettrica complessa dell'acqua di mare per un caso tipico
Page 67
67
alle microonde si può ottenere per esempio l'andamento della matrice di emissione in
funzione dell'angolo di vista (fig 2.15).
.10
010
110
210
310
0
101
102
Frequenza [GHz]
co
sta
nte
die
lett
rica
Temperatura dell'acqua di mare = 300 K; salinità = 38 psu
parte realeparte immaginaria
Figura 2.14 Costante dielettrica relativa per acqua salata alla temperatura di 300 K e
salinità pari a 38 parti per mille (o psu = practical salinity unit), tipica del mare
mediterraneo in estate
0 10 20 30 40 50 60 70 80 900
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
distanza zenitale = arccos() [deg]
em
issiv
ità =
1 -
|r p
|2
temperatura dell'acqua di mare = 300 K; salinità = 38 psu; frequenza = 22.235 GHz
polarizzazione orizziontalehhdpppolarisedpolarisedpolarizzazione verticale
Figura 2.15 Emissività a polarizzazione orizzontale e verticale, definita come 2
p |r|1 ,
dove p = h, v e 2
p |r| è dato dalle (2.96), per KTS 300 , psu 38S e GHz 235.22
Page 68
68
5.5 L'approssimazione di Rayleigh-Jeans
Se si è nelle condizioni per cui vale 1kT
h, dove h = 6.6256 10
-34 J s e k = 1.38054
10-23
J K-1
si può approssimare l'espressione della curva di corpo nero B(T) nella forma
kTc
h
ec
hTB
kTh 2
2
/2
3 2
1
12)(
(2.101)
Tale approssimazione è detta di Rayleigh-Jeans. Dalla (2.101) si ha per esempio che per
una frequenza di 100 GHz e una temperatura di 250 K (rappresentativa della fase
ghiacciata di una nube) si ha 02.0kT
h, per cui alle frequenze di nostro interesse si
può assumere valida tale approssimazione.
Indicando con a e con b rispettivamente l'altezza della superficie e dello strato più alto
di atmosfera considerato, si trova che la temperatura di brillanza della radiazione per z =
b uscente dall'atmosfera alla frequenza e angolo , per le (2.91) e (2.101) è data da
dz
)(e T(z) + e)T|r| (1 + dz
)(e T(z)|r| + eT |r| = ),,(T
b
s
2
2b
2
2
cos
2
B
000
zzp
a
p
a
pp
(2.102)
dove p = v, h indica il canale di polarizzazione rispettivamente verticale e orizzontale.
5.6 La funzione peso
La (2.102) può anche essere scritta come
Page 69
69
dz ),z,,( W(z) + ),,(T = ),,(T
b
a
BGDB ppp (2.103)
dove TBGD è il contributo alla temperatura di brillanza vista da satellite dovuta
all'emissione della superficie e alla riflessione della radiazione cosmica da parte della
superficie, data da
00
e T )|r|(1 + e T |r| = ),,(T S
2
2
COS
2
BGD
ppp (2.104)
e dove
e + e|r|
(z)
)z(
T(z) = ),z,,(W
02
2
pp (2.105)
è detta funzione peso del costituente atmosferico . Nella presente Tesi si supporrà di
indicare con (z) il profilo verticale di densità di massa del vapore d'acqua atmosferico.
La conoscenza della funzione peso permette in questo caso di determinare i valori di
altezza in cui il vapore d'acqua atmosferico contribuisce maggiormente. Dalla (2.105) si
ha però che W dipende a sua volta esplicitamente da (z) attraverso il termine (z)
)z(
.
Se però si osserva ad una frequenza tale che il contributo dominante all'estinzione
provenga dal vapore d'acqua, si ha che OHOH 2
2
2
)z(
OHM dove H O2
è la sezione
d’urto di estinzione e OHM2
il peso molecolare del vapore d’acqua: OHM
2
2OH
(z)
)z(
indipendente da (z). La funzione peso, noto il profilo atmosferico di temperatura,
dipende dunque in questo caso quasi esclusivamente dalle proprietà spettrali del
Page 70
70
coefficiente di estinzione, sia direttamente che attraverso la profondità ottica6. Pertanto,
facendo osservazioni in regioni spettrali a coefficiente di estinzione sufficientemente
diverso, come ad esempio in prossimità di una riga di assorbimento molecolare del
vapore d'acqua (per esempio quella centrata a 183.3 GHz), è possibile, in linea di
principio, dare una stima del profilo di vapore d'acqua (fig. 2.16).
0 100 200 300 400 500 600 7000
5
10
15
20
25
funzione peso per il vapore d'acqua [(K/km) / (g/cm3)]
altezza [km
]
183.31 GHz
183.33 GHz
183.35 GHz
Figura 2.16 Funzione peso per frequenze di osservazione intorno alla riga a 183.3 GHz del vapore
d'acqua.
6 In realtà la profondità ottica dipende anche da (z), ma tale dipendenza è comunque all'interno di un
integrale: si avranno differenze significative solo nel caso in cui il contenuto totale di vapore d'acqua
atmosferico sia sufficientemente differente, nei vari casi considerati.
Page 71
71
Capitolo 3
Estinzione atmosferica nelle microonde
1 Introduzione
Risolvendo l’equazione delle onde (ottenibile dalle equazioni di Maxwell), ricordando
la nota 1 nel cap. 1, si ha che il campo elettrico può essere scritto in notazione
complessa, nella forma di un’onda piana data da
)(
0
tje rkEE (3.1)
Per un generico mezzo assorbente, caratterizzato da una conducibilità e da una
permittività1 si trova (per es. Stratton, 1941)
2
2
2
2
2
2
22 4
1 mcc
jc
k
(3.2)
dove e mjmm sono rispettivamente la costante dielettrica complessa e l’indice
di rifrazione complesso del mezzo attraversato dall’onda. Dalla (1.3) si ha
smceEEI
22
0
2~ (3.3)
dove s è la coordinata della componente di r lungo la direzione di k. Dalla (2.2) si ha
1 Si noti che il simbolo storicamente scelto per la permittività non deve essere confuso con l’identico
simbolo scelto per il coseno dell’angolo rispetto alla verticale.
Page 72
72
Imc
Ids
dI 2 (3.4)
e quindi
SS N
i
e
ii
s
i
N
i
a
ii nnmc
1
)()(
1
)( )( 4
(3.5)
che permette di esprimere il coefficiente di estinzione in funzione della parte
immaginaria dell’indice di rifrazione del mezzo e infine, ricordando quanto detto nel
cap. 2, in funzione della densità numerica ni e della sezione d’urto di estinzione )(e
i
della specie molecolare i-esima, dove NS è il numero totale di specie diverse nel mezzo.
Si vuole adesso discutere in particolare l’estinzione dovuta ai gas atmosferici e alle
nubi, trascurando la trattazione relativa alla pioggia, che verrà supposta assente.
2 Estinzione dovuta ai gas atmosferici
Dalla (3.5) si vede che per determinare il coefficiente di estinzione a una data frequenza
è necessario conoscere sia lo stato termodinamico dell’atmosfera (temperatura,
pressione e composizione) sia i livelli energetici di ciascuna delle specie molecolari
presenti in atmosfera. Si può inoltre porre
),()()(
,
)(
ba
ab
ba
e
i FTS (3.6)
dove a e b indicano due livelli energetici di una molecola isolata di specie i, Sba(T) è
detta forza della transizione e ),( baF è il profilo di riga normalizzato in modo da
essere uguale alla delta di Dirac )( ba per una molecola isolata. Si può far vedere
che (per es. Rosenkranz, 1993)
Page 73
73
kT
E
kT
E
ibaba
ba
ba
eeThcQ
gpTS
)(3
||8)(
223
(3.7)
dove 2|| bap
è l’elemento di matrice di dipolo della molecola rispetto ai livelli energetici
a e b, mediato su tutte le possibili orientazioni della molecola rispetto ai versori di
polarizzazione, gi è il peso statistico dovuto allo spin nucleare per il livello i, Ea ed Eb
sono le energie dei livelli molecolari a e b, con
hEE abba /)( (3.8)
con h costante di Planck e infine dove
i
kT
E
ii
i
eJgTQ )12()( (3.9)
è la funzione di partizione interna, con Ji numero quantico del momento angolare totale
del livello i.
Nella (3.7) si è supposto di essere in condizioni di equilibrio termodinamico locale, così
da poter utilizzare la distribuzione di Maxwell-Boltzmann come densità di probabilità di
occupazione del livello i. Se si ha una tabella delle forze delle transizioni ad una data
temperatura T0 insieme con i livelli energetici associati, si può calcolare la forza della
transizione ab alla temperatura T come
T
T
kT
EE
TTQ
TQTTSTS ba
baba0
0
00
0 12
exp)(
)()()( (3.10)
Si noti infine che le possibili transizioni in una molecola possono essere dovute sia agli
elettroni che ai nuclei. Inoltre i nuclei possono assorbire ed emettere energia sia sotto
forma di rotazione relativa che di vibrazione intorno alla posizione di equilibrio di
ciascun nucleo. Data la grande differenza di massa fra elettroni e nuclei (dell’ordine di
Page 74
74
10-4
-10-5
), l’insieme delle transizioni elettroniche può essere considerato separatamente
da quello delle transizioni nucleari (approssimazione di Born-Oppenheimer). Inoltre le
energie relative a transizioni vibrazionali sono in genere di energia più elevata rispetto a
quelle dovute a rotazioni: è possibile disaccoppiare anche questi due tipi di transizioni.
Si può quindi osservare che le transizioni elettroniche giacciono tipicamente
nell’ultravioletto, quelle vibrazionali nell’infrarosso e quelle rotazionali nelle
microonde, nel submillimetrico e nell’infrarosso lontano. Nella presente Tesi saremo
pertanto interessati alle sole righe rotazionali.
2.1 Profili di riga
Oltre all’allargamento di riga naturale, dovuto cioè al principio di indeterminazione di
Heisenberg, in genere trascurabile, esistono altri tipi di allargamento, come
l’allargamento Doppler termico e l’allargamento collisionale. Il primo è dovuto al moto
di agitazione termica delle molecole che causa uno spostamento Doppler della
frequenza di riga, proporzionale alla proiezione della velocità molecolare nella
direzione di assorbimento (o emissione) della radiazione. All’equilibrio termodinamico
locale, la distribuzione della velocità delle molecole lungo una data direzione è
gaussiana. Se si suppone di considerare positivo per velocità dirette dalla sorgente
verso l’osservatore, si ha (effetto Doppler non relativistico)
)1(c
ba
(3.11)
Si avrà dunque che il profilo di riga Doppler ),( baDF è dato da
2
1),(
D
ba
eFD
baD
(3.12)
con
Page 75
75
baDmc
kT
2/1
2
2
(3.13)
e si ha che la larghezza di allargamento a metà altezza D è data da
DD 2ln2 (3.14)
L’allargamento collisionale è invece dovuto alla perturbazione dello spettro di riga della
molecola assorbente, causato dalle collisioni con altre molecole. Indicando ora con j la
generica transizione, si può far vedere che il profilo di riga collisionale si può esprimere
mediante un profilo di Van Vleck e Weisskopf (Van Vleck & Weisskopf, 1945),
modificato in modo da tenere conto - attraverso il termine - delle eventuali
interferenze fra righe della stessa molecola a diverse frequenze di risonanza
(Rosenkranz, 1988).
0
2222
2
)(
)(
)(
)(1),(
j jj
jjj
jj
jjj
j
jcollF
(3.15)
Nella (3.15) sono inclusi i contributi di ali di righe a frequenza di risonanza negativa2,
formalmente relative a processi di emissione stimolata, che a pressioni elevate (incluso
quelle tipiche della troposfera) possono apportare un contributo non trascurabile.
Se non ci sono sovrapposizioni di altre righe della stessa molecola e la pressione è
sufficientemente bassa (ossia in stratosfera e parte della mesosfera) da poter essere
trascurato il contributo delle righe a frequenza di risonanza negativa, il profilo di riga
collisionale ),( bacollF può essere approssimato dalla curva lorenziana ),( baLF ,
data da
2 Proprio perché sono inclusi è sufficiente considerare nella (3.14) solo le transizioni a frequenza positiva
(j 0). Il termine j = 0 è invece quello dovuto all’assorbimento continuo (o non risonante).
Page 76
76
22
2
)(
1),(
cba
c
ba
baLF
(3.16)
dove c è la semilarghezza a metà altezza della riga, dipendente dalla pressione
atmosferica (in quanto dovuta alle collisioni con le molecole d’aria). Ad un dato livello
di pressione in mesosfera, l’ampiezza della riga collisionale diventa confrontabile con
quella termica D: il profilo di riga sarà dato dalla convoluzione fra i due profili. Tale
profilo ),( baVoigtF , dato da
dFF baDL ),(),( (3.17)
è detto profilo di Voigt, con ’ dato dalla (3.11).
3 Estinzione dovuta a nubi
Oltre al contributo dovuto ai gas atmosferici, si deve considerare quello dovuto
all’estinzione delle particelle – di acqua o ghiaccio - sospese nelle nubi (o anche nella
nebbia e nella foschia). Tale estinzione, per quanto detto nel cap. 2, può essere trattata a
microonde utilizzando l’approssimazione di Rayleigh all’estinzione di Mie. In questo
caso la (3.5) può essere riscritta come
w
e
cce
ccc
a
n
3
)(
)(
.
3
4 (3.18)
dove w è la densità dell’acqua o del ghiaccio (o della mistura), nc, c e a sono
rispettivamente la densità numerica, la densità di massa e il raggio (supposto costante3)
3 In caso contrario è necessario conoscere la distribuzione dei raggi delle particelle e utilizzare un
opportuno integrale.
Page 77
77
delle particelle presenti nella nube e dove )(e
c è dato dalle (2.71). Ricordando che per
particelle tipiche delle nubi si può trascurare a microonde lo scattering rispetto
all'assorbimento, si ha
ww
w
w
c
w
wc
a
cc
e
cccc
nnn
2
3)()(
)2(
12
2
1 Im ka 4 (3.19)
dove nel caso dell’acqua liquida si ha 36 /102
mgOHw mentre per il ghiaccio si
ha OHicew 2916.0 e dove w è dato dalla (2.80) o dalla (2.83) rispettivamente
per l’acqua o il ghiaccio.
4 Il Modello di Propagazione per onde Millimetriche (MPM)
Da quanto si è detto si vede che per calcolare numericamente l’estinzione a una data
frequenza è necessario conoscere:
Le frequenze di risonanza delle righe che contribuiscono significativamente
all’estinzione alla frequenza considerata, per ciascuna specie molecolare presente in
atmosfera.
La forza )( 0TSba di ciascuna riga ba alla temperatura di riferimento T0
La temperatura atmosferica all’altezza (o al livello di pressione) considerata.
La densità delle specie molecolari che contribuiscono all’estinzione e la densità
totale dell’aria (è necessaria per determinare l’allargamento collisionale delle righe).
La forma funzionale del profilo di riga adatta alla specie molecolare considerata e
alle condizioni di pressione del livello atmosferico considerato.
La forma dell’eventuale termine non risonante (estinzione continua) per ciascuna
specie.
La densità di acqua o ghiaccio presente nell’eventuale nube
Page 78
78
L’Istituto per le Scienze delle Telecomunicazioni (ITS, Institute for Telecommunication
Sciences) di Boulder, Colorado (USA) ha elaborato nel corso degli anni, un modello
detto MPM (Millimeter-wave Propagation Model) che mette in relazione le variabili
meteorologiche con i parametri spettroscopici necessari a stimare l’indice di rifrazione
atmosferico - la cui parte immaginaria è legata all’estinzione in atmosfera tramite la
(3.5) - per frequenze minori di 1000 GHz (Liebe, 1985; Liebe, 1989; Liebe et al., 1993).
Per quanto riguarda le transizioni di riga, esso considera esclusivamente quelle relative
all’ossigeno e al vapore d’acqua: in particolare utilizza 44 righe di O2 e 34 righe di H2O.
Il profilo di riga per l’ossigeno è posto uguale alla (3.15), mentre per il vapore d’acqua
usa la (3.15) con j = 0 per ogni transizione j, in quanto esso è di circa due ordini di
grandezza inferiore al termine j (Lam, 1977; Hill 1986). Il modello considera inoltre il
termine non risonante dell’ossigeno4, la cui forma è derivabile - tramite la (3.2) -
dall’espressione della costante dielettrica complessa in un mezzo assorbente omogeneo
e isotropo (si ricordi la 2.79 nel caso dell’acqua). Per quanto riguarda il vapore d’acqua
è necessario conoscerne la densità5, o alternativamente – nota la pressione di
saturazione – l’umidità relativa, più facilmente misurabile. È stato inoltre aggiunto un
termine di continuo di vapore d’acqua, poiché i contributi delle righe teoriche non
riescono a spiegare completamente i risultati sperimentali. Infatti si ha in particolare una
discrepanza di un fattore cinque fra assorbimento teorico di riga e assorbimento
misurato, nelle finestre spettrali comprese fra le frequenze di risonanza (Liebe, 1993).
L’origine teorica di tale “continuo” non è ancora chiara, ma una delle tesi più
accreditate è che provenga dalle ali di righe nell’infrarosso: è comunque possibile
approssimare tale contributo misurato tramite un fit con una pseudo-riga fuori dalla
banda spettrale di applicazione del modello (ossia a frequenza maggiore di 1 THz).
Il modello MPM ha dunque i seguenti parametri di ingresso:
Frequenza della radiazione [GHz]
Pressione barometrica (cioè secca più umida) [hPa]
Temperatura ambientale [°C]
Umidità relativa [%]
4 Per frequenze maggiori di 100 GHz, anche dell’azoto (N2).
Page 79
79
Esso ha come uscita l’indice di rifrazione del gas atmosferico complesso MPMm in ppm,
la cui parte immaginaria si correla all’estinzione atmosferica totale come
ww
w
w
cMPM
mgppmmGHzkm
2
3
1
)2(
)/(3)()( 041917.0)( (3.19)
dove w = 1 per particelle di acqua, mentre w = 0.916 per particelle di ghiaccio. Un
andamento dell’estinzione in funzione della frequenza nelle microonde, per valori tipici
dei parametri atmosferici è riportata in fig. 3.1.
0 100 200 300 400 500 600 700 800 900 100010
-3
10-2
10-1
100
101
102
103
104
frequenza [GHz]
p=1013 hPa; T=15 °C; rh=[0, 10, 50, 100] %; c = [0, 0.1, 0.25, 0.5] g/m3
estinzio
ne [km
-1]
Figura 3.1 Estinzione (km-1
) per frequenze inferiori a 1000 GHz. I grafici in figura, dal
basso verso l'alto, sono relativi rispettivamente a umidità relativa (RH) uguale a zero, RH
= 10, RH = 50, RH = 100% e densità di acqua liquida w = 0, w = 0.1, w = 0.25, w = 0.5
g/m3.
5 Per l’ossigeno, elemento molto stabile in atmosfera, si sa che costituisce il 20.85% dell’aria secca.
Page 80
80
Capitolo 4
Tecniche di inversione per la stima dei parametri del modello
1 Inversione lineare
Si supponga che nella (2.104) e nella (2.105) si possa trascurare la dipendenza dal
profilo (z), considerando ad esempio una frequenza della radiazione prossima a quella
di una transizione del vapore d’acqua (si ricordi la nota 6 del capitolo 2). La (2.103) si
può allora scrivere come
b
a
BGDB dzzpWzpTzpTzpT ),,,()(),,())(,,,())(,,,( (4.1)
dove la dipendenza della (4.1) dal profilo di vapore d’acqua è dovuta unicamente a (z)
che moltiplica la funzione peso all’interno dell’integrale. In questo caso la (4.1)
rappresenta un’equazione integrale di Fredholm di primo tipo, in cui W e sono detti
rispettivamente nucleo e funzione sorgente dell’equazione. La (4.1) è un’equazione
lineare: la misura T rappresenta la proiezione dell’incognita sull’insieme delle
funzioni base di W. Ma a meno che tale insieme non sia ortogonale (e ciò non accade
nel caso in cui si abbia una base di tipo esponenziale, come nei casi di radiazione che
subisce un’estinzione dovuta a un mezzo attraverso cui passa), lo spazio su cui la
funzione sorgente è mappata è di dimensione inferiore a quello della funzione stessa.
Un’inversione diretta della (4.1) conduce dunque in generale a delle instabilità non
fisicamente accettabili: si devono pertanto porre dei condizionamenti arbitrari.
Page 81
81
Per poter trattare la (4.1) numericamente è innanzitutto necessario approssimare
l’integrale in una somma finita di termini mediante un procedimento detto di quadratura
(per es. Twomey, 1977). Si ha
M
i
ijiiij
M
i
ji
b
a
jjj KzzpWcdzzpWzzpTT
11
)(),,,(),,,()())(,,,(
(4.2)
Se si hanno a disposizione N misure, con j = 1, 2, …, N, la (4.2) può essere scritta in
forma matriciale:
KT (4.3)
La (4.3) rappresenta un sistema lineare di N equazioni in M incognite. Per quanto detto
a proposito della non ortogonalità della base di K si ha che parte degli autovalori di K
saranno nulli (o meglio: minori o uguali alla precisione del calcolatore utilizzato). Se si
dispone di N = M misure e si inverte direttamente la (4.3) si trova la soluzione
T 1 K (4.4)
Ma tale soluzione sarà fortemente instabile a causa della singolarità di K-1
: piccole
variazioni di T
danno luogo a grandi variazioni della soluzione. Considerando che gli
elementi di T
rappresentano delle misure, che se ripetute producono valori all’interno
di una data distribuzione, si comprende che tale soluzione non può essere fisicamente
accettabile.
Se si dispone di un numero di misure N > M si può pensare di fare fronte a tali
instabilità risolvendo la (4.3) con il metodo del minimo di 2, dato da
Page 82
82
2
1
12
N
j j
M
i
ijij
T
KT
T
K (4.5)
Ponendo 02
kd
d
per k = 1, 2, ... , M si trova il minimo di
2 in 0
, dato da
TVV T
T
T
T 111
0 )( KKK (4.6)
con TV matrice di varianza-covarianza di T. Gli errori su 0
sono dati da
11 )( KK T
TVV (4.7)
con M x MV .
Tale soluzione è però applicabile soltanto a problemi di tipo lineare e per grandezze con
errori (sia a priori che a posteriori) di tipo gaussiano (per es. Tarantola, 1987). Se inoltre
i parametri del modello sono definiti positivi, non è coerente rappresentarli con una
distribuzione gaussiana: è però possibile utilizzare un condizionamento alla positività o
considerare per esempio una distribuzione log-normale. Infine tale metodo non è in
generale robusto: risente molto di un piccolo numero di errori elevati all’interno di un
insieme di dati.
2 Inversione non lineare
Se il modello diretto, che lega le quantità osservabili con i parametri che si vuole
stimare, è una funzione non lineare di tali parametri, essi non possono essere
determinati invertendo analiticamente la soluzione dell’equazione del trasferimento
radiativo. È però sempre possibile definire la funzione di costo 2, nel caso presente
data da
Page 83
83
2
1 ,
mod
2);,,(),,(
)(
polN
j
sat
jB
jjBjj
sat
B
T
qpTpTq
(4.8)
dove ),,( jj
sat
B pT è la temperatura di brillanza misurata da satellite alla frequenza j,
in polarizzazione pj e per coseno dell’angolo di vista , );,,(mod qpT jjB
è la
corrispondente temperatura di brillanza ottenuta tramite la (2.102), con q
vettore dei
parametri atmosferici che si vogliono stimare e infine sat
jBT , è il corrispondente errore di
calibrazione assoluta in temperatura del radiometro.
Il processo di minimizzazione dovrà ora essere condotto in maniera iterativa: dato un
valore di prova per il vettore dei parametri, è necessario sviluppare una procedura che
migliori tale soluzione, fino a raggiungere il minimo della funzione di costo. Se si
suppone che il punto di prova 0q
nello spazio dei parametri sia sufficientemente vicino
al minimo minq
, si può assumere che la funzione di costo calcolata nel punto di minimo
sia ben approssimabile a uno sviluppo di Taylor del secondo ordine centrato nel punto
di prova. Si ha dunque
)()(2
1))(()()( 0min0min0min0
2
0
2
min
2 qqqqqqqqq
H (4.9)
dove M x MH è la matrice hessiana calcolata in 0q
, con
oqji
ijqq
qH
22
0 )(
.
Calcolando il gradiente della (4.9) si ha, per definizione di punto estremante
)()()(0 0min0
2
min
2 qqqq
H (4.10)
Il valore dei parametri che minimizzano la funzione di costo, ovvero la soluzione del
problema inverso è dunque data da
Page 84
84
)]([ 0
21
0min qqq
H (4.11)
Tale metodo è detto metodo di Gauss-Newton
2.1 Metodo di Levenberg-Marquardt
In generale non è purtroppo vero che il punto di prova sia sufficientemente vicino a
quello di minimo. Si può però sempre procedere iterativamente, partendo da un punto di
prova, applicando poi la (4.11) e ricalcolando il 2. Se esso è minore si prosegue,
altrimenti si può far ricorso a una versione modificata della (4.11) in cui al posto di H si
utilizza una generica costante . In tal caso la (4.11) rappresenta il cosiddetto metodo
della discesa più ripida (steepest descent method).
Il problema nell’applicazione del metodo della discesa più ripida risiede nel fatto che
tale costante moltiplicativa non ha un valore ottimale definito. Se si sceglie un valore
piccolo rispetto al modulo del gradiente in 0q
si rischia di arrivare in un punto con
funzione di costo più elevata di quella di partenza; se invece si prende un valore
sufficientemente grande si è sicuri non aver aumentato la funzione di costo, ma il
numero di iterazioni necessarie a raggiungere il minimo potrebbe essere non tollerabile.
Un efficace compromesso fra il metodo di Gauss-Newton e il metodo della discesa più
ripida è il cosiddetto metodo di Levenberg-Marquardt, la cui ricetta si origina dal
seguente ragionamento. Nel metodo di Gauss-Newton si suppone di scegliere invece
della direzione dell’opposto del gradiente locale, la direzione di un vettore dato dal
prodotto dell'opposto del gradiente locale per l’inverso della matrice hessiana calcolati
nel punto considerato. D'altra parte, nel metodo della discesa più ripida le dimensioni
della costante moltiplicativa devono necessariamente essere pari all'inverso del quadrato
di ciascun parametro: l’unico elemento della matrice hessiana di dimensioni non miste è
quello diagonale ed ha in particolare proprio le dimensioni cercate. Per ovviare dunque
ai problemi di non applicabilità del metodo di Gauss-Newton, nel metodo di Levenberg-
Page 85
85
Marquardt si prevede di sommare a ciascun termine diagonale della matrice hessiana1
una costante positiva. In questo modo, più è grande e più si tende al metodo della
discesa più ripida, sempre applicabile, diminuendo nel contempo però la distanza fra
due punti appartenenti a iterazioni successive, aumentando così il tempo di
minimizzazione. Per piccolo ci si riconduce invece al caso di Gauss-Newton.
Per introdurre tali considerazioni nella (4.11) è necessario definire una matrice H’ data
da (Press et al., 1992)
jiH
jiHH
ij
ij
ij )1( (4.12)
e la (4.11) diventa
)]([ 0
21
1 qqq mm
H (4.13)
dove m è il passo dell’iterazione. Si noti che, consistentemente con quanto descritto,
nella (4.13) quando è grande i termini diagonali hanno maggiore importanza, mentre
per =0 si ritrova la (4.11).
In pratica, il metodo di Levenberg-Marquardt consiste nel seguente schema:
a) si sceglie un vettore di parametri 0q
b) si calcola )( 0
2 q
c) si sceglie un valore di molto piccolo (per es. 0.001)
d) si risolve la (4.13) e si calcola )( 1
2 q
e) se )()( 0
2
1
2 qq
si aumenta (per es. di un fattore 10) e si torna al punto d)
f) se )()( 0
2
1
2 qq
si decresce della stessa quantità, si aggiorna il vettore dei
parametri al nuovo valore 1q
e si torna al punto d)
1 In realtà si considera una matrice hessiana modificata in modo da risultare definita positiva, per non
invertire la direzione del gradiente.
Page 86
86
Il procedimento iterativo si interrompe quando dopo un dato numero di iterazioni non si
è riusciti a diminuire il 2 di una quantità significativa. Si ricordi infatti che una
diminuzione di 2 molto inferiore alla deviazione standard della distribuzione di
2
attesa (determinata cioè dalla scelta del particolare modello diretto), che è pari alla
radice quadrata della differenza delle misure meno i parametri del modello che si
vogliono determinare2, non è statisticamente significativa.
Per concludere, si osservi che per risolvere la (4.13) numericamente è necessario
assicurarsi che nessun autovalore della matrice da invertire sia nullo o comunque vicino
alla precisione del calcolatore. In altre parole è necessario che la matrice da invertire
non sia singolare. Per evidenziare questo possibile problema si può esprimere la matrice
simmetrica H’ come
TUWUH (4.14)
con U matrice le cui colonne sono gli autovettori di H’ mentre W è una matrice
diagonale contenente gli autovalori di H’. Si ha
TUUW 11 H (4.15)
Se nella (4.15) si pone 1/wij = 0 per wij 0, la (4.15) è detta matrice inversa
generalizzata di H’.
2 In realtà tale proprietà vale soltanto per modelli lineari e per errori nei parametri distribuiti
normalmente. Si può però sempre supporre di poter linearizzare il modello in prossimità della soluzione, a
patto che gli errori sui parametri trovati siano sufficientemente piccoli.
Page 87
87
Capitolo 5
Elaborazione del modello diretto di emissione
1 Il modello atmosferico
Dallo studio dei profili standard di temperatura e vapore d’acqua alle latitudini
mediterranee (McClatchey, 1972) si trova che, sia nella stagione estiva che in quella
invernale, è possibile supporre che il profilo di temperatura T(z) vari linearmente con la
quota fino alla tropopausa e che poi fino a circa 25 km da terra possa essere considerato
costante. Il profilo di densità di massa di vapore d’acqua (z) invece presenta un
andamento approssimabile in maniera soddisfacente ad un’esponenziale. Per z 25 km
si ha dunque (fig. 5.1)
tptp
tp
zzT
zzazTzT
)()(
0 (5.1)
dove T0 è la temperatura dell’aria a az e Ttp è la temperatura della tropopausa che si
suppone inizi all’altezza ztp. Si ha poi (fig. 5.2)
)/)(exp()( 0 Hazz (5.2)
dove 0 è la densità superficiale di vapore d'acqua e H è la scala di altezza del vapore
d'acqua in km.
Dall’equazione idrostatica gdzzzdp dry )()( e dall’equazione di stato dei gas
MRzTzzp dry )()()( , dove )(zdry è la densità di massa dell’aria secca, dalla (5.1)
si trova che la pressione dell’aria secca p(z) è data da
Page 88
88
0 5 10 15 20 25210
220
230
240
250
260
270
280
290
300
altezza [km]
tem
pera
tura
atm
osfe
rica [K
]
dati invernali a media latitudine
fit invernale a media latitudine
dati estivi a media latitudine
fit estivo a media latitudine
Figura 5.1 Profilo di temperatura per atmosfera standard a latitudini mediterranee
nel caso invernale (*) ed estivo (o) e relativi fit lineari a tratti.
tptptp
tp
zzzzp
zzazT
pzp
))(exp(
))(1()(
0
0
(5.3)
dove p0 è la pressione a z = a, ) (178.34 1 kmKRgM , g = 9.81 m s-2
l’accelerazione di gravità, M = 28.966 kg kmol-1
il peso molecolare medio dell’aria
secca, R = 8.314 103 J kmol
-1 K
-1 la costante universale dei gas, )( 00 TTpp tptp è la
pressione ad altezza ztp e )(178.34 KTRTgM tptp km-1
.
La pressione dovuta al vapore d’acqua e(z) è invece calcolata dall'equazione di stato dei
gas:
tp
tp
tp
zzHazT
zzazTHazzTz
ze
))(exp(9.2166
))()()(exp(9.2166
87.2166
)()()(
0
0
0
kPa (5.4)
Page 89
89
dove si è fatto uso della (5.1) e (5.2) con (z) espresso in g/m3 e OHM
2 = 18.01534 kg
kmol-1
. La pressione barometrica P(z) sarà dunque determinata come
)()()( zezpzP kPa (5.5)
Approssimando la dipendenza dalla temperatura della pressione di vapore saturo (Liebe,
1993) si ha:
)(
2.6793exp
)(
1085144.5)(
5
22
zTzTzesat kPa (5.6)
L’umidità relativa RH(z) percentuale è pertanto data da:
100)(sate
ezRH % (5.7)
0 5 10 15 20 250
5
10
15
altezza [km]
densità d
i vapore
d'a
cqua [
g/m
3]
dati invernali a media latitudine
fit invernale a media latitudine
dati estivi a media latitudine
fit estivo a media latitudine
Figura 5.2 Profilo di vapore d’acqua per atmosfera standard a latitudini
mediterranee nel caso invernale (*) ed estivo (o) e relativi fit esponenziali
Page 90
90
2 Modello diretto di emissione
Introducendo la (2.104), (5.1), (5.2) e (5.5) nella (2.102) per b< ztp si ha
b
a
b
a
p
b
a
b
a
p
b
a
b
a
p
zz
aTaT
dz e)z(dz e)z(e|r|
dz e)z(dz e)z()(e|r|
+T
dz e)z( T(z)1
+dz e)z( T(z)e|r|
+TT
0
0
0
22
0
0
22
BGD
22
BGDB
(5.8)
Tenendo conto che
)dee(dz e)z(
)dee(dz e)z(
)1(dz e)z(
)1(dz e)z(
0
0
0
0
zabz
zbaz
e
e
b
a
b
a
b
a
b
a
b
a
b
a
(5.9)
e definendo l’altezza efficace l come
zl
b
a
de
(5.10)
la (5.8) diventa
Page 91
91
)e()e(e|r|
)1)(()1)((e|r| +TT
000
000
2
2
00
2
2
BGDB
lablba
eaTeaT
p
p
(5.11)
che, ponendo b – a = h, può essere riordinata nella forma
00 2
2
0
2
00BGDB e|r|))(()|r|(1)(+TT
pp lhTeTlhT
(5.12)
ovvero, inserendo la (2.104)
00 2
2
0
2
00B e|r|))(()|r|)(1()(T
pCOSpS lhTTeTTlhT
(5.13)
Per b > ztp la (2.103) può essere scritta spezzando l’integrale in due pezzi:
dz ),z,,( W(z) dz ),z,,( W(z)
b
z
z
a tp
tp
ppTT BGDB (5.14)
Dalla (5.8) si ha
b
z
tp
b
z
tp
p
z
a
z
a
p
z
a
z
a
p
tptp
tp
tptptp
TTz
zaT
aT
dz e)z(dz e)z(e|r|
dz e)z(
dz e)z(e|r|
dz e)z(dz e)z()(e|r|
+TT
0
00
22
22
0
0
22
BGDB
(5.15)
Osservando che
Page 92
92
)dee(dz e)z(
)dee(dz e)z(
)(dz e)z(
)(dz e)z(
0
0
0
0
zaezz
zezaz
ee
ee
tptptp
tptptp
tptp
tptp
z
a
tp
z
a
z
a
tp
z
a
z
a
z
a
(5.16)
e che
)1(dz e)z(
)1(dz e)z(
tp
tp
tp
tp
e
e
b
z
b
z
(5.17)
si ha
)1()1(e|r|
)dee()dee(e|r|
))(())((e|r| +TT
0
000
000
2
2
2
2
00
2
2
BGDB
tptp
tptptptp
tptp
eTeT
zaezzeza
eeaTeeaT
tptpp
z
a
tp
z
a
tpp
p
(5.18)
Ricordando che )(0 azTT tptp e ponendo azh tptp altezza della tropopausa,
dalla (5.18) si ha
Page 93
93
00 2
2
0
2
00BGDB e|r|))~
(()|r|(1)~
(+TT
ptpptp lhTeTlhT
(5.19)
dove si è posto
zl
tpz
a
de~
(5.20)
Introducendo la (2.104) nella (5.19) si arriva infine all’espressione
00 2
2
0
2
00B e|r|))~
(()|r|)(1()~
(T
pCOSpStp lhTTeTTlhT
(5.21)
In definitiva, dalla (5.13) e dalla (5.21) si ha
tpptpCOSpStp
tppCOSpS
B
zblhTTeTTlhT
zblhTTeTTlhTT
00
00
2
2
0
2
00
2
2
0
2
00
e|r|))~
(()|r|)(1()~
(
e|r|))(()|r|)(1()(
(5.22)
È dunque possibile esprimere la temperatura di brillanza uscente dallo strato
atmosferico ad altezza b in funzione dei parametri dei profili atmosferici e delle
condizioni al contorno, rispettivamente nel caso in cui tale livello sia situato al disotto o
al disopra della base della tropopausa.
3 Rugosità della superficie marina indotta dal vento
La riflessione su una superficie piatta è, come si è visto, modellizzabile facendo uso dei
coefficienti di riflessione di Fresnel (2.96). La radiazione riflessa è originata dalla
Page 94
94
radiazione incidente proveniente dallo stesso angolo rispetto alla normale alla superficie
e da angolo azimutale opposto e risulta fortemente polarizzata. In presenza di vento la
superficie del mare si increspa: non è più possibile assumere una riflessione della
radiazione di tipo speculare. Si formano inoltre zone in cui è presente la schiuma,
ovvero una mistura di aria e acqua che fa da interfaccia ai due mezzi, che ha la
caratteristica di produrre un sostanziale incremento della emissività del mare (Stogryn,
1972), (Smith, 1988).
La rugosità della superficie marina può essere schematizzata con un modello a doppia
scala (Wu & Fung, 1972; Wentz, 1975) che considera la riflessione della radiazione
dovuta a onde a larga scala (onde di gravità) e a piccola scala (onde capillari),
schematizzate mediante una distribuzione di superfici speculari indipendenti, con una
data altezza e pendenza. Nel primo caso l'altezza quadratica media di ciascuna
superficie è grande rispetto alla lunghezza d'onda della radiazione incidente, mentre nel
secondo caso si suppone che l'altezza quadratica media delle superfici sia piccola
rispetto alla lunghezza d'onda: è possibile schematizzare la riflessione facendo uso nel
primo caso dell'ottica geometrica e nel secondo caso della teoria delle perturbazioni alla
trattazione rigorosa della diffrazione.
Per tenere conto della presenza di schiuma si indica con f la frazione di superficie
marina non coperta da schiuma. La riflettività può dunque essere espressa come (Wentz,
1996)
222 || ||)1(|| clearpclearpp rkfrfr (5.23)
dove k, supposto minore di uno, indica la diminuzione di riflettività dovuta alla
schiuma.
La riflettività in assenza di schiuma 2|| clearpr è data dalla somma della riflettività
incoerente calcolata integrando su tutte le direzioni di incidenza il coefficiente di
scattering bistatico dipendente dalla polarizzazione e dalla riflettività coerente (Yueh
et al., 1997). Quest'ultima è rappresentata al primo ordine dalla riflettività di Fresnel
vista in precedenza, mentre la prima si trova calcolando l'espressione
Page 95
95
iisshvhviisshhhh
iissvhvhiissvvvv
iii
sclearh
clearv
r
r
,;,(),;,(
),;,(),;,(dd
4
1
||
||1
0
2
0
2
2
(5.24)
dove i e s indicano rispettivamente la direzione incidente e quella diffusa, mentre v e h
indicano la direzione di polarizzazione verticale e orizzontale. Il coefficiente di
scattering dipende dalla distribuzione delle pendenze delle superfici speculari del mare
a piccola e a grande scala e dal numero d'onda della radiazione incidente.
La (5.24) può essere anche pensata come dovuta al contributo dell'ottica geometrica e
della diffrazione:
2
om
2 ||)1(|| gevclearv rr (5.25)
dove rappresenta il contributo della diffrazione, piccolo rispetto a uno (Wentz, 1975).
Combinando la (5.23) con la (5.25) si trova che il coefficiente di riflessione in presenza
di vento si scrive come
2
om
2 ||)1(|| gevv rFr (5.26)
dove F include le costanti viste in precedenza.
Se si suppone di prendere una distribuzione di pendenze di tipo gaussiano si può far
vedere (Wentz, 1996) che il coefficiente di riflessione è approssimabile nella forma
WTrTrrrrr sisiFresnvgev )288)(53()288()53(|||| 3210
22
om (5.27)
dove 2|| Fresnvr è il coefficiente di riflessione di Fresnel dato nelle (2.96), i l'angolo di
incidenza in gradi, Ts la temperatura superficiale del mare in kelvin e W il modulo della
velocità del vento in m/s. I valori dei coefficienti ri sono dati in tab. 5.1 ed in fig. 5.3.
Page 96
96
Freq.
(GHz)
6.93 10.65 18.70 23.80 36.50 50.30 52.80 89.00
v-pol r0 -0.27e-3 -0.32e-3 -0.49e-3 -0.63e-3 -1.01e-3 -1.20e-3 -1.23e-3 -1.53e-3
h-pol r0 0.54e-3 0.72e-3 1.13e-3 1.39e-3 1.91e-3 1.97e-3 1.97e-3 2.02e-3
v-pol r1 -0.21e-4 -0.29e-4 -0.53e-4 -0.70e-4 -1.05e-4 -1.12e-4 -1.13e-4 -1.16e-4
h-pol r1 0.32e-4 0.44e-4 0.7e-4 0.85e-4 1.12e-4 1.18e-4 1.19e-4 1.30e-4
v-pol r2 0.01e-5 0.11e-5 0.48e-5 0.75e-5 1.27e-5 1.39e-5 1.40e-5 1.15e-5
h-pol r2 0.00e-5 -0.03e-5 -0.15e-5 -0.23e-5 -0.36e-5 -0.32e-5 -0.30e-5 0.00e-5
v-pol r3 0.00e-6 0.08e-6 0.31e-6 0.41e-6 0.45e-6 0.35e-6 0.32e-6 -0.09e-6
h-pol r3 0.00e-6 -0.02e-6 -0.12e-6 -0.20e-6 -0.36e-6 -0.43e-6 -0.44e-6 -0.46e-6
Tabella 5.1 Coefficienti del modello per ottica geometrica (da Wentz, 1996). r0 è espresso in s/m, r1 in
s/(m deg), r2 in s/(m K) e r3 in s/(m deg K).
0 50 100-2
-1.5
-1
-0.5
0x 10
-3 r0V
0 50 1000.5
1
1.5
2
2.5x 10
-3 r0H
0 50 100-1.5
-1
-0.5
0x 10
-4 r1V
0 50 1000
0.5
1
1.5x 10
-4 r1H
0 50 1000
0.5
1
1.5x 10
-5 r2V
0 50 100-4
-2
0
2x 10
-6 r2H
0 50 100-2
0
2
4
6x 10
-7 r3V
0 50 100-6
-4
-2
0
2x 10
-7 r3H
Figura 5.3 Grafico dei coefficienti di tab. 5.1 in funzione della frequenza (espressa in GHz)
Il termine F nella (5.27) può essere espresso in maniera empirica in funzione della
velocità del vento W per mezzo di un confronto fra la temperatura di brillanza osservata
da satellite e le corrispondenti misure di vento ottenute da boe. Se si considerano
Page 97
97
osservazioni tramite radiometro SSM/I nella banda 19-37 GHz (Wentz, 1997) e
SMMR-SASS (Wentz, 1992; Wentz, 1996) a 6.9 e 10.7 GHz si trova:
212121
21
12
2
1121
11
))((2
1m
)()(
2
1m
m
WWWWmmWF
WWWWW
WWmmWF
WWWF
(5.28)
dove
GHz 191035.31026.11042.8m
GHz 191083.51028.91089.2m37254
2
38264
1
(5.29)
e
GHz 1900915.0GHz) 19(mm
GHz 190.00254GHz) 19(mm
22
11
(5.30)
e dove W1 e W2 sono rispettivamente uguali a 7 e 12 m/s.
Se si indica con TB la temperatura uscente dalla superficie del mare, si ha
),;,(),;,(
),;,(),;,()(
4
1cos,
2
0
1
0
0
iisshvhviisshhhh
iissvhvhiissvvvvskyBiii
sHB
VBTeTdd
T
T
(5.31)
dove
0 0
0
,
de ))T((
i
skyBiT B (5.32)
è la temperatura di brillanza incidente sulla superficie del mare, mentre Tcos è al solito la
temperatura del fondo cosmico.
La (5.31) può essere approssimata nella forma (Wentz, 1996)
Page 98
98
2
cos, ||)e)(1(
0
vskyBB rTTT
(5.33)
dove 2|| vr è dato dalla (5.26) e dove
0
0
2
622
4.3
62
e)0.70)()37(001.02.6(
e)0.70))(37(018.05.2(
SS
SS
H
V (5.34)
Nella (5.34) 2S rappresenta la varianza totale della pendenza delle superfici speculari
del mare, data dalla somma della varianza controvento e per vento laterale, all'interno
della distribuzione P(Suw,Scw) gaussiana delle pendenze Suw e Scw (Cox & Munk, 1954)
2
22
2exp
1),(P
S
SS
SSS cwuw
cwuw
(5.35)
dove la varianza 2S aumenta al diminuire della lunghezza d'onda della radiazione a
causa del fatto che le onde del mare di lunghezza minore della lunghezza d'onda della
radiazione non contribuiscono alla distribuzione di pendenze. Si può far vedere (Wilheit
& Chang, 1980) che il valore massimo di varianza, detto limite ottico, si raggiunge a 37
GHz. Si ha dunque (Wentz, 1996)
GHz 37)37(00748.01(1022.5
GHz 371022.53.132
32
WS
WS (5.36)
dove W è la velocità del vento a 10 metri di altezza sul livello del mare.
Nella (5.34) il termine 62 0.70 SS ha un massimo per 069.02 S . Per
069.02 S , tale termine è mantenuto al suo valore massimo (Wentz, 1996). Inoltre
per GHz 37 si ha che H è posto uguale al suo valore massimo, raggiunto a 37
Page 99
99
GHz.. Si noti infine che quando l'assorbimento atmosferico diventa molto elevato,
tende a zero e la temperatura uscente dalla superficie del mare (5.33) tende a non
dipendere più dalla rugosità del mare e tende al valore assunto in condizioni di
riflessione speculare.
3.1 Effetti di direzione del vento
A causa dell'anisotropia della distribuzione delle pendenze delle onde e della differenza
di altezza delle onde nella direzione controvento e laterale al vento, si ha una
dipendenza della temperatura di brillanza dalla direzione del vento. Tale effetto è molto
dipendente dall'angolo di osservazione del radiometro rispetto alla verticale (Yueh,
1997): la temperatura di brillanza in polarizzazione verticale per = 40° e angolo
azimutale = 0° (controvento) risulta più elevata di quella per = 90° (laterale al
vento) mentre vale l'opposto per angolo di osservazione = 70°. Per = 53° si può far
vedere che (Wentz, 1996) l'incremento di emissività E (uguale e opposto alla
diminuzione di riflettività) dovuto alla direzione del vento nella banda 19–37 GHz è
esprimibile come
2coscos 21 E (5.37)
dove i coefficienti dipendono dalla polarizzazione e dalla velocità del vento ma sono
sostanzialmente indipendenti dalla frequenza:
254
2
253
1
254
2
254
1
1076.31093.8
1057.81020.1
1000.31046.4
1018.21083.7
WW
WW
WW
WW
H
H
V
V
(5.38)
Per quanto riguarda la dipendenza della temperatura di brillanza dalla direzione del
vento al di fuori della banda di frequenze considerata si può solo supporre che si
Page 100
100
comporti in modo analogo a quello dovuto al modulo della direzione del vento. In
particolare dalla (5.30) si può affermare che la (5.38) può ragionevolmente essere usata
anche per frequenze maggiori di 37 GHz. Per frequenze minori di 19 GHz invece, la
(5.29) indica che si ha una diminuzione del segnale di intensità del vento al diminuire
della frequenza: la variazione di emissività per direzione del vento può essere presa pari
a
) 19(1
3719
1GHzm
EmE
(5.39)
dove 3719E è data dalla (5.37).
4 Modello diretto di emissione in presenza di vento su mare
Da quanto visto precedentemente si ha che in presenza di vento, l’intensità uscente dalla
sommità dell’atmosfera, espressa tramite l’equazione (2.91), può essere scritta nella
forma
000
e)T( )( +e )(e ),0( )1)(1(),0( Ss,,s
BeIIIeI skysky
(5.40)
In approssimazione di Rayleigh-Jeans le (5.22) diventano quindi, dopo alcuni passaggi,
tppptpCOSpppStp
tpppCOSpppS
B
hhlhTTeTeTTlhT
hhlhTTeTeTTlhTT
000
000
2
0000
2
0000
)e(1))~
(())(1()~
(
)e(1))(())(1()(
(5.41)
Page 101
101
Si noti che per un valore fissato della temperatura della tropopausa Ttp si trova – tramite
la (5.1) – un valore specifico di altezza della tropopausa htp. Se si sceglie poi un valore
fissato di altezza dell’atmosfera h (per esempio 25 km), la temperatura di brillanza
uscente dall’atmosfera sarà data dalla parte superiore della (5.41), nel caso in cui
l’altezza della tropopausa risulti maggiore o uguale all’altezza dell’atmosfera scelta.
Sarà viceversa data dalla parte inferiore della (5.41) se l’altezza della tropopausa risulta
inferiore ad h.
5 Confronto con il modello PolRadTran
Il modello di trasferimento radiativo che è stato scelto allo scopo di confrontare i
risultati numerici ottenuti tramite il modello presentato in questa Tesi è denominato
PolRadTran. Tale modello è stato elaborato da Frank Evans e collaboratori, presso
l'Università del Colorado a Boulder, a partire dal 1991 (Evans & Stephens, 1991). Esso
risolve numericamente l'equazione del trasporto radiativo per un'atmosfera piano-
parallela verticalmente non omogenea, in presenza di scattering. Tale codice è in grado
di trattare in modo completo le caratteristiche di polarizzazione di particelle orientate a
caso (il mezzo è conseguentemente isotropo), di qualsiasi forma, aventi un piano di
simmetria. La formulazione prevede la presenza sia di sorgenti termiche sia di una
sorgente solare collimata. Il campo angolare di radiazione è rappresentato mediante una
serie di Fourier per la coordinata azimutale e tramite discretizzazione dell'angolo
zenitale. Il modello calcola la radiazione monocromatica polarizzata emergente da
un'atmosfera, ed è dunque configurato per applicazioni nel campo del telerilevamento.
Per particelle orientate a caso con un piano di simmetria si ha, come si è visto, una
matrice di fase con solo sei elementi differenti su sedici. Le informazioni sulla matrice
di fase sono lette da un file contenente i valori dell'espansione in polinomi di Legendre
di ciascuno dei sei elementi. Viene inoltre calcolata l'emissione termica per ciascun
livello verticale, che è poi interpolata linearmente all'interno di ciascuno strato. È infine
incorporata l'emissione termica superficiale e la riflettività superficiale, che può essere
sia di tipo speculare che di tipo Lambertiano. I parametri per ciascuno strato sono letti
anch'essi da un file che contiene l'altezza e la temperatura di ogni livello (ovvero
Page 102
102
l'interfaccia fra strato e strato successivo), l'assorbimento gassoso per lo strato
sottostante e - in presenza di scattering - il nome del file contenente, come detto, i valori
degli elementi della matrice di fase. L'uscita è rappresentata da un file che riporta per
ogni livello verticale i valori dei parametri di Stokes calcolati per ciascun azimut e per
ciascun angolo zenitale di quadratura impostato, sia per la radiazione entrante che per la
radiazione uscente dal livello dato, oltre che il flusso totale entrante e uscente dal
medesimo livello.
L'equazione del trasporto radiativo in geometria piano-parallela è risolta tramite il
metodo di somma e raddoppiamento (doubling and adding method), basato
fondamentalmente sull'ipotesi di interazione lineare fra materia e campo di radiazione.
Se si indica con I+ e con I
- la radiazione polarizzata rispettivamente entrante ed uscente
da un dato strato di atmosfera, si ha (fig. 5.4)
SIRITI
SIRITI
010
101 (5.42)
1I
1I
0I
0I
R
T
S
Figura 5.4 Illustrazione schematica del principio di interazione
dove T è la matrice di trasmissione, R la matrice di riflessione e S il vettore sorgente. Se
lo strato considerato è l'intera atmosfera (comprensiva della superficie), calcolare R, T
ed S equivale a risolvere l'equazione del trasporto radiativo. Se però la profondità dello
strato considerato è sufficientemente piccola, è possibile per esempio considerare il
termine sorgente lineare nella profondità ottica. In pratica il codice suddivide ciascuno
Page 103
103
strato di ingresso in un dato numero di sottostrati di profondità pari alla precisione
desiderata per il calcolo delle differenze finite, applicando quindi la relazione (5.42) ad
ogni sottostrato.
Per confrontare i valori di temperatura di brillanza uscenti dall'atmosfera ottenuti con il
modello presentato nella Tesi (in questa sezione denominato EffProfMod) e quello di
Evans si è pensato di considerare un'atmosfera in condizioni di cielo sereno composta
da ventisei livelli di profondità pari a un chilometro, in modo da raggiungere l'altezza
massima di 25 km. Si è quindi considerato un insieme di valori di riferimento (Tab. 5.2)
relativi ai parametri di ingresso di EffProfMod, controllando che non venisse mai
raggiunta la condizione di saturazione di vapore d'acqua.
Tramite tali valori sono stati costruiti i corrispondenti profili atmosferici efficaci ed i
valori dell'indice di rifrazione complesso dell'acqua di mare n - parametro richiesto da
PolRadTran - legato alla costante dielettrica complessa mediante la relazione 2n .
Esprimendo n come
ninn (5.43)
e ricordando che i si trova (Tab 5.3)
)Im(
)Re(
n
n (5.44)
Per ogni livello di altezza scelto (ovvero per ogni chilometro) sono stati calcolati i
valori dei profili efficaci trovati, mentre per ogni strato compreso fra due livelli
consecutivi si è calcolato la media del coefficiente di assorbimento gassoso su una
sottogriglia di valori corrispondente al passo di quadratura per il calcolo della
profondità ottica in EffProfMod (Tab. 5.4 e fig. 5.5). Si è in particolare scelto il passo
pari a 0.1 km, compromesso soddisfacente fra la velocità di calcolo e la scala di
variazione dei profili atmosferici verticali. Si è dunque calcolato le temperature di
brillanza uscenti dall'atmosfera in polarizzazione verticale e orizzontale per un angolo di
Page 104
104
vista di 53°, alle frequenze 10.7 GHz, 19.35 GHz, 37.0 GHz e 85.5 GHz, per i due
modelli considerati. I risultati del confronto sono riportati in Tab 5.5 e in fig. 5.6.
T0 [K] [K/km] 0 [g/m3] H [km] TS [K] salt [psu] p0 [hPa]
288 6.5 7 2 288 38 1013
Tabella 5.2 Valori dei parametri del modello EffProfMod utilizzati per
determinare i parametri fisici atmosferici alle altezze considerate
10.7 GHz 19.35 GHz 22.235 GHz 37.0 GHz 85.5 GHz
n'-jn'' 7.60-j2.63 6.33-j2.96 5.98-j2.97 4.77-j2.75 3.35-j1.93
Tabella 5.3 Indice di rifrazione complesso dell'acqua di mare alle frequenze
indicate, per salinità pari a 38 psu e TS = 288 K, usato come parametro di ingresso
in PolRadTran.
z [km] T(z) [K] [km-1
]
10.7 GHz 19.35 GHz 22.235 GHz 37.0 GHz 85.5 GHz
25 217 3.04E-06 4.24E-06 1.00E-05 1.41E-05 1.48E-05
24 217 4.17E-06 5.81E-06 1.39E-05 1.93E-05 2.03E-05
23 217 5.71E-06 7.96E-06 1.94E-05 2.64E-05 2.79E-05
22 217 7.83E-06 1.09E-05 2.69E-05 3.62E-05 3.82E-05
21 217 1.07E-05 1.50E-05 3.74E-05 4.96E-05 5.24E-05
20 217 1.47E-05 2.06E-05 5.21E-05 6.80E-05 7.20E-05
19 217 2.01E-05 2.83E-05 7.25E-05 9.32E-05 9.89E-05
18 217 2.76E-05 3.89E-05 1.01E-04 1.28E-04 1.36E-04
17 217 3.79E-05 5.36E-05 1.40E-04 1.75E-04 1.88E-04
16 217 5.19E-05 7.40E-05 1.96E-04 2.41E-04 2.59E-04
15 217 7.12E-05 1.02E-04 2.73E-04 3.31E-04 3.59E-04
14 217 9.78E-05 1.42E-04 3.80E-04 4.55E-04 5.00E-04
13 217 1.34E-04 1.99E-04 5.30E-04 6.27E-04 7.01E-04
12 217 1.85E-04 2.80E-04 7.41E-04 8.65E-04 9.91E-04
11 217 2.44E-04 3.83E-04 1.03E-03 1.15E-03 1.35E-03
10 223 3.08E-04 5.08E-04 1.42E-03 1.46E-03 1.77E-03
9 229.5 3.87E-04 6.82E-04 1.98E-03 1.85E-03 2.35E-03
8 236 4.85E-04 9.35E-04 2.77E-03 2.36E-03 3.19E-03
Page 105
105
7 242.5 6.08E-04 1.31E-03 3.90E-03 3.02E-03 4.43E-03
6 249 7.65E-04 1.89E-03 5.53E-03 3.91E-03 6.35E-03
5 255.5 9.70E-04 2.79E-03 7.88E-03 5.16E-03 9.41E-03
4 262 1.25E-03 4.21E-03 1.13E-02 6.98E-03 1.45E-02
3 268.5 1.63E-03 6.49E-03 1.64E-02 9.75E-03 2.31E-02
2 275 2.20E-03 1.02E-02 2.38E-02 1.42E-02 3.82E-02
1 281.5 3.08E-03 1.61E-02 3.49E-02 2.16E-02 6.55E-02
0 288 0.00E+00 0.00E+00 0.00E+00 0.00E+00 0.00E+00
Tabella 5.4 Parametri di ingresso considerati per il modello PolRadTran.
0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 0.160
5
10
15
20
25
somma del coefficiente di assorbimento alle frequenze considerate [km]
altezza [
km
]
valori mediati su 1 km
10.7 GHz
19.35 GHz
22.235 GHz37.0 GHz
85.5 GHz
Figura 5.5 Rappresentazione grafica dei coefficienti di assorbimento gassoso riportati in Tab. 5.4
EffProfMod PolRadTran
freq [GHz] TbV [K] TbH [K] TbV [K] TbH [K]
10.7 164.46 79.69 163.45 77.58
19.35 184.47 105.62 185.35 106.01
22.235 204.77 140.66 205.53 140.97
37.0 206.56 129.50 207.95 130.22
85.5 246.51 186.80 246.56 186.83
Tabella 5.5 Temperature di brillanza in polarizzazione verticale (TbV) e orizzontale (TbH)
alla cima dell'atmosfera su mare calmo.
Page 106
106
10 20 30 40 50 60 70 80 9060
80
100
120
140
160
180
200
220
240
260
frequenza [GHz]
Tem
pera
tura
di brilla
nza [K
]
T0 = 288 K; = 6.5 K/km; zero
= 7 g/m 3; H = 2 km; TS = 288 K; salt = 38 psu; p
o = 1013 hPa
Vpol
(Evans & Stephens, 1991)
Vpol
(presente Tesi)
Hpol
(Evans & Stephens, 1991)
Hpol
(presente Tesi)
Figura 5.6 Confronto fra le temperature di brillanza alla cima dell'atmosfera calcolate tramite il modello
di Evans & Stephens (1991) e quello presentato. Si suppone di considerare un angolo di vista di 53° e che
il profilo atmosferico di vapore d'acqua sia esponenziale e quello di temperatura lineare.
6 Sensibilità del modello diretto di emissione
Una volta messo a punto il modello diretto, è possibile utilizzarlo per calcolarne la
risposta in temperatura di brillanza alle variazioni dei parametri fisici di cui il modello è
funzione. Se tale indagine è eseguita in funzione della frequenza della radiazione, si può
valutare la cosiddetta sensibilità spettrale. In questo modo è possibile stabilire quali
siano i parametri fisici in linea di principio misurabili e determinare inoltre in quale
frequenza e polarizzazione sia più opportuno eseguire la misura. Infatti, come è noto, la
precisione con cui un parametro p può essere stimato dipende direttamente dalla
sensibilità dello strumento di misurazione – in questo caso il radiometro – definibile
come il rapporto fra la variazione della temperatura di brillanza uscente dall’atmosfera
in polarizzazione V o H ][, KT HBV in corrispondenza della variazione p del
parametro in esame.
Page 107
107
10.7 GHz 19.35 GHz 22.235 GHz
p
p
KTBV
][
p
KTBH
][
p
KTBV
][
p
KTBH
][
p
KTBV
][
p
KTBH
][
p0 [hPa] 0.01 0.01 0.01 0.02 -0.01 -0.02
sal [psu] -0.01 0.00 -0.02 -0.01 -0.02 -0.01
TS [K] 0.52 0.23 0.31 0.13 0.26 0.10
T0 [K] -0.02 -0.03 0.03 0.02 0.20 0.23
[K/km] -0.19 -0.01 -0.37 -0.23 -1.02 -1.28
0 [g/m3] 0.19 0.34 1.54 2.77 3.06 5.55
H [km] 0.45 0.78 3.79 6.94 9.27 17.78
CLW [kg/m2] 2.15 4.30 4.90 10.80 3.95 9.65
w [m/s] -0.08 0.24 0.89 1.92 0.65 1.53
[deg] 0.00 0.00 -0.01 -0.02 -0.01 -0.01
37 GHz 85.5 GHz
p
p
KTBV
][
p
KTBH
][
p
KTBV
][
p
KTBH
][
p0 [hPa] 0.03 0.05 0.02 0.05
sal [psu] -0.04 -0.03 -0.04 -0.03
TS [K] 0.08 -0.05 0.00 -0.14
T0 [K] -0.02 -0.11 0.04 -0.22
[K/km] -0.35 -0.02 -0.64 -0.14
0 [g/m3] 1.23 2.40 2.35 5.80
H [km] 2.74 5.49 4.59 12.44
CLW [kg/m2] 10.90 29.60 -2.50 51.05
w [m/s] 0.50 1.60 -0.30 0.30
[deg] -0.01 -0.02 -0.01 -0.02
Tabella 5.6 Sensibilità del modello diretto di emissione ai parametri fisici considerati.
Dalla tabella 5.6 e dalla fig. 5.7 si possono dedurre informazioni sulla possibilità di
misurare un dato parametro fisico nelle frequenze delle microonde caratteristiche dei
sensori SSM/I e TMI, i cui dati sono stati utilizzati nella presente Tesi. Si può notare
innanzitutto che per variazioni tipiche della pressione secca e della salinità del mare si
hanno variazioni della temperatura di brillanza inferiori a 1 K. È del resto noto (per es.
Ulaby et al., 1981) che si ha sensibilità alla salinità fino a circa 4 GHz. Per quanto
Page 108
108
riguarda la temperatura atmosferica si ha che la massima sensibilità fra quelle calcolate
è raggiunta in corrispondenza della riga di risonanza del vapore d’acqua a 22.235 GHz
(che è l’unica riga di risonanza all’interno delle frequenza studiate). Ciò è spiegabile
osservando che la sensibilità alla temperatura è massimizzata al centro della riga in
quanto si massimizza in funzione della frequenza il termine dipendente dalla
temperatura all’interno del profilo di riga, dato dall’ampiezza di riga collisionale (si
ricordi la 3.15 e la 3.16). Inoltre, il fatto che tale sensibilità sia positiva1 si spiega
notando che la temperatura di brillanza uscente dall’atmosfera è, nel caso di un mezzo
otticamente sottile come l’atmosfera terrestre, caratterizzato cioè dall’avere una
profondità ottica molto minore di uno, approssimabile (si ricordi la 2.92) come
effskyB TT
0
, , dove effT è la temperatura atmosferica ad una data altezza efficace.
Dalla (2.14) si dunque che la temperatura di brillanza uscente dall’atmosfera è correlata
linearmente all’estinzione che è (per es. Liebe et al., 1993) funzione di una potenza
positiva della temperatura.
Le sensibilità maggiori si ottengono però in corrispondenza dei parametri del profilo di
vapore d’acqua e del contenuto di acqua liquida atmosferica, nel primo caso in
corrispondenza della risonanza del vapore d’acqua a 22.235 GHz e a 85.5 GHz in cui si
sente l’effetto dell’ala della riga a 183.3 GHz, molto più intensa della risonanza a
frequenza inferiore. Nel caso dell’acqua liquida si ha la massima sensibilità in
polarizzazione orizzontale a 85.5 GHz, mentre si ha un massimo relativo a 37.0 GHz in
polarizzazione verticale: le differenze di forma funzionale al variare della
polarizzazione sono dovute a corrispondenti variazioni di riflettività della superficie
che, nel caso presente, è supposta essere composta di acqua (salata). Per quanto riguarda
il vento su mare, infine, si ha che la sensibilità massima è raggiunta a 19.35 GHz in
polarizzazione orizzontale, sia per l’intensità che, in maniera però decisamente minore,
per la direzione.
1 Si noti che il gradiente di temperatura è in realtà (si ricordi la (2.106)) dato dall’opposto di .
Page 109
109
0 50 100-0.05
0
0.05
se
nsib
ilità
[K
/hP
a]
pressione secca superficiale
0 50 100-0.04
-0.02
0
se
nsib
ilità
[K
/psu
]
salinità del mare
0 50 100-0.5
0
0.5
1
se
nsib
ilità
[K
/K]
temperatura del mare
0 50 100-0.5
0
0.5
se
nsib
ilità
[K
/K]
temperatura atmosferica superficiale
0 50 100-1.5
-1
-0.5
0
se
nsib
ilità
[K
/(K
/km
)]
gradiente temperatura atmosferica
0 50 1000
2
4
6
se
nsib
ilità
[K
/(g
/m3)]
densità superficiale di vapore d'acqua
0 50 1000
10
20
se
nsib
ilità
[K
/km
]
scala di altezza del vapore d'acqua
0 50 100-50
0
50
100
se
nsib
ilità
[K
/(kg
/m2)]
contenuto colonnare di acqua liquida
frequenza [GHz]
0 50 100-1
0
1
2
se
nsib
ilità
[K
/(m
/s)]
velocità del vento su mare
frequenza [GHz]
0 50 100-0.02
-0.01
0
se
nsib
ilità
[K
/de
g]
direzione del vento
frequenza [GHz]
Figura 5.7 Sensibilità del modello diretto ai parametri fisici, calcolata alle frequenze 10.7, 19.35,
22.235, 37 e 85.5 GHz, in polarizzazione verticale (colore blu) e orizzontale (colore rosso), per valori
atmosferici e superficiali standard e angolo di vista 53°.
Per calcolare infine la sensibilità del modello al contenuto colonnare di vapore d’acqua
o acqua precipitabile HWV 0 - espressione trovata integrando la (5.2) per altezza
dell'atmosfera molto maggiore della scala di altezza del vapore d'acqua - basta osservare
che
H
TT
HWV
T BBB
00
11
(5.44)
In fig. 5.8 si è riportato l’andamento in frequenza della sensibilità all’acqua
precipitabile: risultano confermate le considerazioni fatte a proposito della densità
Page 110
110
superficiale e della scala di altezza del vapore d’acqua, per cui la massima sensibilità si
ha a 22.235 GHz, con un massimo secondario a 85.5 GHz, particolarmente in
polarizzazione orizzontale.
10 20 30 40 50 60 70 80 900
1
2
3
4
5
6
frequenza [GHz]
Sensib
ilità
all’
acqua
pre
cip
ita
bile
[K
m2/k
g]
Figura 5.8 Sensibilità del modello all’acqua precipitabile in polarizzazione verticale (in
blu) e orizzontale (in rosso)
Page 111
111
Capitolo 6
Stime del contenuto colonnare di vapore d’acqua
1 Pre-elaborazione dei dati SSM/I
In base alle librerie HDF a disposizione della comunità scientifica, sono stati
implementati al PIN – Centro Studi Ingegneria dell’Università di Firenze, programmi in
grado di gestire i dati SSM/I a disposizione secondo le esigenze. In particolare viene
eseguito:
Ricampionamento dell’EFOV a terra, alla risoluzione spaziale desiderata, mediante
deconvoluzione del profilo di antenna.
Georeferenziazione dell’immagine in una data proiezione cartografica, relativa alla
zona di interesse e di risoluzione data, sulla base dei dati orbitali nominali e sulla
geometria di acquisizione.
Creazione di una maschera mare-terra relativa alla medesima scena e di uguale
risoluzione.
Correzione di eventuali errori nella procedura di georeferenziazione, dovuti alla non
completa accuratezza dei dati di ingresso.
Filtraggio dei pixel in corrispondenza dei quali sia stimato in atto un evento
precipitativo.
Il ricampionamento dell’EFOV è un passaggio fondamentale perché permette di creare
un insieme omogeneo di dati a diverse frequenze (si ricordi la (1.12) e le tab. 1.1 e 1.2).
Se la cella di ricampionamento è scelta pari al dato a minor risoluzione (ovvero a minor
frequenza), è sufficiente mediare su tale estensione i dati a risoluzione più elevata. Nel
caso dell’SSM/I si ottengono risoluzioni di circa 56 km (tab. 1.1). Se, come nel caso
presente, si necessita di risoluzioni più elevate sia a causa del fatto che la zona di studio
Page 112
112
non ha una elevata estensione spaziale, sia per esigenze di integrazione dei dati con
quelli provenienti da altri sensori a più alta risoluzione, si deve ricorrere a tecniche di
miglioramento della risoluzione mediante deconvoluzione del profilo di antenna1. Si
noti che il miglioramento della risoluzione ottenuto applicando tali tecniche corrisponde
inevitabilmente ad un aumento del livello di rumore del dato. Se si riscrive la
temperatura di antenna (1.22), supposta corretta per l’emissione spuria entrante dai lobi
laterali, come
dxdyyxGyxTiT
iS
iccBcA ),(~
),()( ,,, (6.1)
dove (x,y) e ),(~
, yxG ic sono rispettivamente le coordinate e la proiezione del guadagno
di antenna sul piano immagine per la i-esima misura di temperatura di antenna nel
canale c e dove Si rappresenta l’area su cui il guadagno ),(~
, yxG ic è significativo. La
dipendenza del guadagno da i è dovuta al fatto che la direzione di puntamento cambia
per ogni misura (fig. 6.1).
Figura 6.1 Impronta a terra dell'antenna del radiometro SSM/I per due misure diverse sia
lungo la traccia sia perpendicolarmente alla traccia (da Long & Daum, 1998).
1 In realtà tali tecniche possono essere applicate anche nel caso precedente, per ottenere una riduzione di
risoluzione che consideri le differenze dei profili di antenna dei vari canali: in questo caso si parla di
interpolazione ottimale.
Page 113
113
Per determinare la temperatura di brillanza in ciascuno dei canali le cui misure sono
spazialmente sovrapposte si possono utilizzare tecniche di inversione come quella di
Backus-Gilbert (per es. Stogryn, 1978), che sono state applicate specificamente ai dati
SSM/I (Poe, 1990; Farrar & Smith, 1992; Robinson et al., 1992). Tale metodo esprime
la temperatura di brillanza nel pixel (xj,yj) e nel canale c come combinazione lineare di
N misure vicine2:
N
i
cAijjjcB iTayxT
1
,, )(),( (6.2)
dove gli aij sono determinati dalla geometria di acquisizione e dalla matrice di
correlazione del rumore. La soluzione, come è noto, non è unica: si devono porre dei
condizionamenti arbitrari. Nel caso dell’SSM/I (ma vale in generale per radiometri
multifrequenza) si può ad esempio scegliere, fissata la risoluzione spaziale, la soluzione
che determina un livello di rumore tale da massimizzare la correlazione fra il canale
considerato e quello a 85.5 GHz, a più alta risoluzione. È chiaro però che per il canale
ad alta risoluzione il condizionamento è nuovamente del tutto arbitrario.
Per applicare la tecnica sopra descritta è necessario avere a disposizione una relazione
fra la direzione di puntamento dell’antenna per una data misura e le coordinate terrestri.
Tali relazioni possono essere determinate mediante calcoli geometrici e di meccanica
celeste basati sui parametri orbitali (o effemeridi) del satellite (per es. Wentz, 1991). Si è
scelto poi di applicare la tecnica di inversione in modo da ottenere il piano immagine
nella cosiddetta rappresentazione equiangola, in cui la coordinata x è la longitudine
geografica e la coordinata y la latitudine geografica , con risoluzione del pixel pari a
2.0jj per ogni pixel j dell’immagine.
Sulla base di informazioni contenute all’interno dei dati stessi, si produce un’immagine
sovrapponibile a quelle contenenti le temperature di brillanza georeferenziate, in cui è
riportata una classificazione della tipologia di superficie terrestre osservata. In
particolare interessa discriminare i pixel appartenenti al mare, da quelli relativi alla
2 N può essere scelto pari al numero di misure che hanno un guadagno significativo all’interno del pixel
di interesse (Long & Daum, 1998 scelgono per esempio una soglia di 11 dB dal picco). Ciò evita
problemi di singolarità nell’inversione.
Page 114
114
costa o alla terra. Il presente studio infatti suppone di considerare le caratteristiche di
emissività proprie del mare.
Una volta prodotta l’immagine georeferenziata si procede al controllo di eventuali errori
di georeferenziazione dell'immagine. Essi sono in genere dovuti a inesattezze sui valori
delle effemeridi del satellite (che possono cambiare per esempio in periodi di
accresciuta attività solare) o a problemi di disallineamento del sensore rispetto al
satellite o infine a una cattiva accuratezza della conoscenza dell’angolo di puntamento
dell’antenna rispetto al nadir. Tali errori possono essere anche dell’ordine di 15 km. Per
ovviare a tali problemi si può sovrapporre alle immagini georeferenziate una immagine
vettoriale della linea di costa e traslare l’origine delle coordinate fino a raggiungere il
miglior accordo visivo fra la linea di costa misurata e quella sovraimpressa.
Infine si eliminano dall'analisi successiva i pixel di immagine in cui si stimi sia presente
la pioggia. Infatti tale fenomeno, come si è detto, oltre che rendere meno intelligibile il
segnale radiometrico del vapore d'acqua, deve essere trattato tenendo conto
dell'incremento dell'emissività al satellite dovuto allo scattering da parte delle gocce di
pioggia. Nel modello diretto presentato tale eventualità è invece stata scartata a priori.
Per filtrare tali pixel si è scelto di adottare una tecnica che considera la differenza di
polarizzazione nel canale a 19 GHz (Ferriday & Avery, 1997).
In fig. 6.2 è riportato un esempio di scena georeferenziata relativa alle diverse bande
SSM/I.
2 Pre-elaborazione dei dati TMI
I dati 1B11 sono distribuiti in granuli in formato HDF e sono organizzati sotto forma di
metadati e di dati di scansione (swath data). I metadati, a loro volta suddivisi in
metadati generali (ECS core metadata) e metadati specifici per il prodotto (product
specific metadata), forniscono una descrizione del contenuto, del formato e dell’utilità
dell’insieme di dati. In particolare è importante il parametro contenente il numero di
scansioni nscan nell’orbita, detto Orbit Size.
Page 115
115
19.35 GHz V
50 100 150 200 250
20
40
60
80
100 0
100
200
300
19.35 GHz H
50 100 150 200 250
20
40
60
80
100 0
100
200
300
22.235 GHz V
50 100 150 200 250
20
40
60
80
100 0
100
200
300
37 GHz V
50 100 150 200 250
20
40
60
80
100 0
100
200
300
37 GHz H
50 100 150 200 250
20
40
60
80
100 0
100
200
300
85.5 GHz V
50 100 150 200 250
20
40
60
80
100 0
100
200
300
85.5 GHz H
50 100 150 200 250
20
40
60
80
100 0
100
200
300
Figura 6.2 Esempio di insieme di dati SSM/I georeferenziati, relativi al 12 Novembre 1998. La scala a
destra di ogni immagine è riferita alla TB in K.
I dati di scansione contengono un’insieme di campi tra cui:
Scan Time:
- Year: anno a quattro cifre (per es. 1999)
- Month: mese dell’anno
- Day of Month: giorno del mese
- Hour: ora (UTC) del giorno
- Minute: minuti dell’ora
- Second: secondi del minuto
- Day of Year: giorno dell’anno
Geolocation:
- Latitudine del centro dell’EFOV dei canali a 85.5 GHz al livello dell’ellissoide
terrestre (208 x nscan dati).
- Latitudine del centro dell’EFOV dei canali a 85.5 GHz al livello dell’ellissoide
terrestre (208 x nscan dati).
LowResCh:
- Temperatura di brillanza dei sette canali a bassa risoluzione in una data
scansione (104 x nscan dati).
Page 116
116
HighResCh:
- Temperatura di brillanza dei due canali ad alta risoluzione in una data scansione
(208 x nscan dati).
Per leggere ed elaborare i dati sopra descritti sono stati sviluppati appositi programmi
scritti in linguaggio C, che fanno uso della libreria Science Algorithm Toolkit
appositamente creata dal TSDIS per leggere dati relativi agli strumenti a bordo del
satellite TRMM e distribuita agli sviluppatori su richiesta. Tramite tale libreria è
possibile anche interfacciarsi con un database fornito con il toolkit che fornisce, per una
data longitudine e latitudine relativa a tutto il globo terrestre, la classificazione del tipo
di superficie: In particolare esso permette di discriminare: terra, ghiaccio, mare, costa e
costa vicino al ghiaccio. In particolare si sono elaborate procedure per:
Georeferenziazione dei dati relativi a una scena di interesse, in rappresentazione
equiangola di risoluzione 2.0jj . Si noti che tale risoluzione corrisponde
alle nostre latitudini a dimensioni, in approssimazione di Terra sferica, dell’ordine di
22 km (lungo il meridiano) x 16 km (lungo il parallelo). Come si vede dalla fig. 1.7,
tale risoluzione è tale da contenere sempre in ciascun pixel un numero maggiore di
zero di centri di EFOV del satellite: si è pertanto evitato di applicare la procedura di
ricampionamento sopra descritta nel caso dell’SSM/I, semplicemente mediando in
ciascun pixel i diversi valori di temperatura di brillanza. Si noti inoltre che la
risoluzione è stata posta uguale a quella scelta per i dati SSM/I al fine di rendere i
dati confrontabili.
Produzione di un’immagine di estensione e risoluzione identica ai dati di
temperatura di brillanza, contenente la classificazione mare-terra.
Filtraggio dei pixel in cui sia presente pioggia.
In fig. 6.3 è riportato un esempio di scena georeferenziata relativa alle diverse bande
TMI.
Page 117
117
3 Casi di studio
L'insieme dei dati utilizzati per l'analisi presentata consiste in otto acquisizioni
temporalmente quasi coincidenti dei radiometri SSM/I e TMI, nel 1998 e 1999, in tutti i
rispettivi canali di frequenza e polarizzazione. La zona di studio è relativa alla parte
meridionale del bacino del Mediterraneo, delimitata a nord dalla latitudine massima
osservabile con il TMI, pari circa a 36°.
10.7 GHz V
100 200 300
20
40
60
80
100 0
100
200
300
10.7 GHz H
100 200 300
20
40
60
80
100 0
100
200
300
19.4 GHz V
100 200 300
20
40
60
80
100 0
100
200
300
19.4 GHz H
100 200 300
20
40
60
80
100 0
100
200
300
21.3 GHz V
100 200 300
20
40
60
80
100 0
100
200
300
37.0 GHz V
100 200 300
20
40
60
80
100 0
100
200
300
37.0 GHz H
100 200 300
20
40
60
80
100 0
100
200
300
85.5 GHz V
100 200 300
20
40
60
80
100 0
100
200
300
85.5 GHz H
100 200 300
20
40
60
80
100 0
100
200
300
Figura 6.3 Esempio di insieme di dati TMI georeferenziati. La scala a destra di ogni immagine è riferita
alla TB in K.
L'intervallo temporale massimo accettato fra i tempi di attraversamento dei rispettivi
satelliti sopra l'area studiata è stato scelto inferiore a venti minuti. I dati sono relativi
alla stagione primaverile, estiva ed invernale; sono stati acquisiti inoltre a partire da
circa le 04:00 del mattino, fino a circa le 19:30 ora locale. In fig. 6.4 si è riportato un
esempio della zona di acquisizione coincidente, relativa al 12 Novembre 1998, nel
canale a 85.5 GHz in polarizzazione verticale.
Page 118
118
50 100 150 200 250
10
20
30
40
50
60
70
80
90
100
Figura 6.4 Acquisizione nel canale 85.5 V relativa al bacino del Mediterraneo meridionale ottenuta dal
TMI (striscia quasi orizzontale) e dall'SSM/I (striscia quasi verticale), del 12 Novembre 1998.
4 Determinazione dell'acqua precipitabile tramite tecnica di inversione
A frequenza, polarizzazione e angolo di acquisizione fissati, il modello diretto (5.41) è,
come si è visto, funzione di un dato insieme di parametri fisici, parte dei quali possono
essere considerati costanti durante tutta l'acquisizione considerata, come ad esempio
l'altezza dell'atmosfera. Infatti, per valori tipici dei parametri, il limite asintotico della
temperatura di brillanza in funzione dell'altezza è raggiunto entro i primi 25 chilometri:
pertanto si sceglie tale valore come altezza dell'atmosfera. Inoltre si fissa il valore della
temperatura della tropopausa considerandolo pari a quello climatologico.
Si è inoltre determinato il valore della temperatura superficiale del mare utilizzando i
dati relativi alle medie settimanali stimate nell'infrarosso termico dal sensore NOAA-
AVHRR e distribuiti dal Physical Oceanography Distributed Active Archive Center
(PO.DAAC) del JPL (Jet Propulsion Laboratory) di Pasadena (fig. 6.5).
Si è inoltre posto la temperatura atmosferica superficiale uguale a quella del mare, allo
scopo di ridurre le variabili nell'algoritmo di inversione, confidando sia sul fatto che la
Page 119
119
stima della temperatura superficiale del mare nell'infrarosso risente anche della
temperatura dei bassi strati atmosferici, sia sul fatto che la sensibilità del modello diretto
a tale parametro non è delle più elevate, anche se non certo trascurabile (si veda la
tabella 5.6).
sd1998322.hdf
20 40 60 80 100 120 140 160 180 200
20
40
60
800
10
20
30
14 15 16 17 18 19 20 21 22 23 24 250
5
10
15
20
num
ero
di pix
el [%
]
SST [°C]
temperatura mediana: 19.95°C
Figura 6.5 Distribuzione spaziale della media settimanale della temperatura superficiale del mare (SST)
in gradi centigradi, stimata mediante osservazioni del NOAA-AVHRR nell'infrarosso termico, relativa al
periodo 9 – 16 Novembre 1998.
Per quanto riguarda la salinità del mare si è fatto riferimento a valori medi mensili
relativi alla parte meridionale del bacino del Mediterraneo, ricavati dal Mediterranean
Oceanic Data Base (MODB), sviluppato all'interno del programma MAST (Marine
Science and Technology) dell'Unione Europea.
Per la pressione superficiale secca si è infine fatto riferimento ai valori climatologici,
data la scarsa variabilità temporale di tale parametro oltre che della sua bassa sensibilità
all'interno del modello diretto.
I restanti sei parametri del modello diretto (gradiente di temperatura atmosferica, densità
superficiale e scala di altezza del vapore d'acqua, densità di acqua liquida, velocità e
direzione del vento su mare) sono stati stimati tramite la tecnica di inversione descritta
Page 120
120
precedentemente. Si noti infatti che il numero dei canali Npol a disposizione nel caso
dell'SSM/I è pari a sette, mentre nel caso del TMI è pari a nove: in entrambi i casi si ha
un numero sufficiente di dati per stimare i sei parametri del modello scelti. L'errore
quadratico medio della stima rms può essere definito come
1
)(
)(1
2
min
mod
,,
min
pol
N
j
jB
sat
jB
N
qTT
qrms
pol
(6.3)
dove minq
è il vettore dei parametri in cui è minimo il 2 e che rappresenta dunque la
miglior stima delle quantità fisiche osservate dal radiometro durante un tempo di
integrazione; sat
jBT , e mod
, jBT sono invece, come noto, le temperature di brillanza
rispettivamente misurate e stimate da modello nel j-esimo canale. Se l'errore di
calibrazione assoluta può essere considerato lo stesso per tutti i canali di uno stesso
radiometro, dalla definizione di 2 e dalla (6.3) segue
1
)()( min
2
min
pol
sat
BN
qTqrms
(6.4)
Dalla (6.4) si vede che dato un valore di 2 minimo, la stima dei parametri è tanto più
accurata quanto maggiore è il numero dei canali radiometrici con cui è stata
determinata.
Per rendere più attendibile l'eventuale contributo emissivo dell'acqua liquida si è scelto
di moltiplicare il valore della densità di goccioline di acqua per il rapporto di
supersaturazione corrispondente al livello atmosferico considerato (Wang & Chang,
1990). Esso è dato dal rapporto fra la pressione nominale di vapore d'acqua )(~ ze – ossia
la pressione che raggiungerebbe il vapore d'acqua senza considerare il limite di
saturazione - e la pressione di saturazione di vapore d'acqua esat(z) alla stessa altezza.
Infatti è ragionevole supporre che la densità di acqua liquida aumenti all'aumentare
della pressione nominale di vapore d'acqua in quanto in tal modo aumenta la quantità di
Page 121
121
acqua condensabile, anche se il processo di condensazione ha come condizione
necessaria la presenza dei cosiddetti nuclei di condensazione. Si noti che tale scelta non
implica un aumento delle variabili del modello e presenta il vantaggio di disporre di un
profilo verticale di densità di acqua liquida nella nube. Il contenuto colonnare di acqua
liquida CLW sarà pertanto dato da
2
1
)(
)(~z
zsat
dzze
zeclwCLW (6.5)
dove clw, densità di acqua liquida alla saturazione del vapore d'acqua, è il parametro
che viene in realtà stimato e dove z1 e z2 sono i livelli di saturazione del vapore d'acqua.
Per ciascun insieme di osservazioni multispettrali di una data regione spaziale, dal
profilo efficace di vapore d'acqua stimato (fig. 6.6) si calcola infine il contenuto
colonnare di vapore d'acqua PW, dato da
HdzePW
h
H
z
0
0
0
(6.6)
la cui affidabilità è correlata al corrispondente valore di scarto rms della stima. In
generale si può dire che un valore elevato di rms, ossia significativamente maggiore
dell’errore di calibrazione assoluta nominale caratteristico del radiometro considerato, è
imputabile o all’inefficacia del modello fisico a schematizzare il fenomeno sotto
osservazione, o ad una scelta non appropriata del tentativo iniziale in ingresso alla
tecnica di inversione utilizzata. In figura 6.7 sono riportate le distribuzioni di rms
ottenute con i dati acquisiti da SSM/I e TMI, relativi ai casi di studio considerati.
Dalla fig. 6.7 si nota che per i valori dei parametri fisici utilizzati come primo tentativo
nell’inversione, le prestazioni del modello fisico sviluppato sono significativamente
migliori per i dati SSM/I, sia in assoluto che rispetto all’errore di calibrazione nominale,
pari a 3 K per l’SSM/I e a 2 K per il TMI. Tramite tali istogrammi è possibile fissare
una soglia di rms per i dati relativi a ciascun radiometro e considerare soltanto i risultati
dell’inversione con rms inferiore alla soglia.
Page 122
122
220 230 240 250 260 270 2800
5
10
15
20
25
profilo temperatura [K]
altezza [km
]
T0 = 288 K; = 6.5 K/km; Ttp = 217 K; 0 = 7.78 g/cm3; H = 2 km; p0 = 1013 hPa; CLW = 0.00416 kg/m2
1 2 3 4 5 6 70
5
10
15
20
25
profilo densità vapore d'acqua [g/m3]
altezza [km
]
200 400 600 800 10000
5
10
15
20
25
profilo pressione secca [hPa]
altezza [km
]
2 4 6 8 100
5
10
15
20
25
profilo di pressione di vapore d'acqua [hPa]
altezza [km
]
0 20 40 60 80 1000
5
10
15
20
25
profilo umidità relativa [%]
altezza [km
]
0 0.002 0.004 0.006 0.008 0.010
5
10
15
20
25
densità acqua liquida nella nube [g/m3]
altezza [km
]
Figura 6.6 Profili atmosferici risultanti dalla stima tramite inversione del modello fisico di emissione.
-2 0 1 2 3 4 5 6 8 11 140
250
500
750
1000
1200
1400
RMS da inversione SSM/I [K]
Num
ero
di d
ati u
tiliz
zati
Mediana SSM/I =1.6 K; Var = 0.41 K
-2 0 1 2 3 4 5 6 8 11 140
250
500
750
1000
1200
1400
RMS da inversione TMI [K]
Num
ero
di d
ati u
tiliz
zati
Mediana TMI = 3.8 K; Var = 2.55 K
Figura 6.7 Distribuzione dello scarto quadratico medio della stima
(RMS) dell’acqua precipitabile per i dati SSM/I e TMI utilizzati.
In figura 6.8 sono riportati i valori di acqua precipitabile stimati mediante TMI con
valore di soglia di rms pari a 5 K, in funzione dei valori di acqua precipitabile stimati
Page 123
123
con l’SSM/I con valore di soglia di rms pari a 2 K, relativi alla medesima regione
spaziale di estensione 0.2° x 0.2°, osservata con uno sfasamento temporale non
superiore a venti minuti. Il valore di correlazione ottenuto risulta pari a 0.85, dunque
estremamente significativo, anche se è ben visibile un fenomeno di saturazione per le
stime SSM/I in corrispondenza di 30-35 kg/m2, non presente nelle stime TMI. Tale
differenza di comportamento potrebbe essere spiegabile con il fatto che nel caso del
TMI il canale del vapore d'acqua non coincide con la transizione di risonanza, come per
l'SSM/I.
PW SSM/I modello inversione
PW
TM
I m
odell
o i
nvers
ione
Figura 6.8 Confronto fra l’acqua precipitabile PWmodello inversione stimata con il TMI e con l’SSM/I.
5 Determinazione dell'acqua precipitabile con metodi empirici
Per confrontare i valori di acqua precipitabile stimati mediante la tecnica di inversione
utilizzata nella presente Tesi, si sono applicati ai dati SSM/I considerati, due algoritmi
empirici di letteratura (Alishouse et al., 1990; Schluessel & Emery, 1990). Essi mettono
in relazione il contenuto colonnare di vapore d'acqua e la temperatura di brillanza
misurata dal sensore SSM/I in determinati canali, mediante regressione con una serie di
Page 124
124
misurazioni del profilo di vapore d'acqua ottenute tramite radiosondaggi. In particolare,
se si indica con PWAlishouse e con PWSchluessel il contenuto colonnare di vapore d'acqua in
kg/m2 stimato rispettivamente con il primo e con il secondo metodo empirico citato, si
ha
PWalishouse = 232.89393 - 0.148596*Tb19v - 1.829125*Tb22v + 0.006193*Tb22v2 -
0.36954*Tb37v (6.7)
PWschluessel = 10.0*(23.82 - 4.059loge(280.0 - Tb22v) + 0.02451(loge(280.0 - Tb22v) -
Tb37v)) (6.8)
Nel primo caso l'accuratezza stimata è di 2.4 kg/m2 e gli autori avvertono che tale
accuratezza è stata raggiunta per misure relative a latitudini maggiori di 60° e
nell'ipotesi di assenza di nubi. Nel secondo caso, la scelta della forma funzionale della
legge di regressione e dei canali radiometrici è stata invece effettuata con l'aiuto di
simulazioni di trasferimento radiativo: l'accuratezza è pertanto in linea di principio
indipendente dalla latitudine e, entro certi limiti, dalla presenza di acqua liquida. La
regressione riportata nella (6.8) è una delle tre regressioni presentate dagli autori ed ha
un accuratezza stimata pari a 1.6 kg/m2.
Lo schema della procedura di stima dell’acqua precipitabile tramite inversione e tramite
algoritmi empirici è presentato in figura 6.9.
6 Confronto dei risultati
In figura 6.10 si è riportato il contenuto colonnare di vapore d’acqua stimato con la
tecnica di inversione applicata ai dati SSM/I, in funzione di quello stimato con
l’algoritmo di Schluessel & Emery rappresentato dalla (6.8). La relazione trovata è
chiaramente bimodale, pertanto la correlazione ottenuta è bassa (R = 0.27). Stesso tipo
di risultato è ottenuto utilizzando l’algoritmo di Alishouse.
Page 125
125
Trasferimento
Radiativo
Temperature di
brillanza
Profili
efficaci
Procedura di
Inversione Tentativo
iniziale
Algoritmi
Empirici
PWmodello
Figura 6.9 Procedimento di stima e di validazione dell’acqua precipitabile.
PW SSM/I modello inversione
PW
SS
M/I
Scl
ues
sel
Figura 6.10 Confronto fra acqua precipitabile stimata tramite
inversione dei dati SSM/I e acqua precipitabile stimata con metodi
empirici (Schluessel & Emery, 1990).
La natura dei due diversi modi è chiara se si considera la relazione esistente fra la
temperatura di brillanza misurata da satellite nel canale a 22.235 GHz – corrispondente
Page 126
126
alla transizione di risonanza del vapore d'acqua - e le stime di acqua precipitabile, come
mostrato in fig. 6.11.
SSM/I 22v Tb
PW
Sch
lues
sel
Figura 6.11 Confronto fra acqua precipitabile stimata con algoritmo
empirico e temperatura di brillanza misurata da SSM/I nel canale a
22.235 GHz in polarizzazione verticale.
Infatti anche in questo caso la relazione è bimodale (dati in chiaro e in scuro), dove tale
classificazione è stata eseguita in base ai dati appartenenti ai due diversi modi in figura
6.10. Le correlazioni fra dati appartenenti a ciascun modo sono molto elevate, pari a R =
0.975 (dati in scuro) e R = 0.996 (dati in chiaro).
Se invece si riporta in grafico la stima di acqua precipitabile ricavata tramite inversione,
in funzione della temperatura di brillanza a 22.235 GHz in polarizzazione verticale (fig.
6.12), si ottiene un ottimo valore di correlazione lineare (R = 0.971). Pertanto, la
bimodalità osservata in figura 6.10 è da imputare a una differente risposta dell'algoritmo
empirico, a parità di temperatura di brillanza misurata nel canale del vapore d'acqua.
Page 127
127
Si osservi infine che, se si considerano separatamente i differenti modi, si ottengono
ottime correlazioni lineari fra acqua precipitabile ottenuta con metodi di inversione e
metodi empirici (fig. 6.13), rispettivamente R = 0.954 e R = 0.967.
SSM/I 22v Tb
PW
model
lo i
nver
sione
Figura 6.12 Acqua precipitabile in funzione della temperatura di brillanza
a 22.235 GHz in polarizzazione verticale stimata tramite tecnica di
inversione.
Modo 1
PW
Sch
lues
sel
PW modello inversione
R = 0.95408
0 5 10 15 20 25 30 35 400
5
10
15
20
25
30
35
40
PW modello inversione
PW
S
chlu
essel
Modo 2 R = 0.96952
Figura 6.13 Confronto fra stima di contenuto colonnare di vapore d'acqua ottenuto con metodi fisici
ed empirici, nei due differenti modi di figura 6.10.
Page 128
128
Conclusioni
Nel corso della Tesi sono stati presentati innanzitutto gli strumenti e le tecniche in grado
di misurare la radiazione elettromagnetica nella regione spettrale delle microonde.
Particolare attenzione è stata prestata alla descrizione delle relazioni che intercorrono
fra le grandezze direttamente misurabili e la temperatura di brillanza, parametro
correlato alle caratteristiche fisiche della sorgente osservata. Ci si è inoltre soffermati
sulle quantità che caratterizzano la qualità della misura: sensibilità radiometrica, errore
di calibrazione assoluta e risoluzione spaziale in funzione della frequenza di
osservazione. Si sono poi passati in rassegna gli strumenti che hanno volato o che
stanno attualmente volando su satellite, approfondendo le caratteristiche dei radiometri
SSM/I e TMI i cui dati sono stati utilizzati in questa sede.
Per poter ricavare informazioni fisiche sulla sorgente emettente di interesse – in questo
caso l'atmosfera terrestre - è necessario conoscere i meccanismi di interazione fra
radiazione e materia lungo il percorso fra la sorgente e il sensore. Si è pertanto studiato
approfonditamente sia il trasporto radiativo in atmosfera nella regione delle microonde
sia le proprietà elettromagnetiche dei mezzi al contorno, nel caso di osservazioni da
satellite su mare in assenza di pioggia. Tale analisi è stata condotta considerando in
maniera completa le caratteristiche di polarizzazione della radiazione, in quanto il
processo di misura con antenna è di per sé una misura di una componente di
polarizzazione. Ciascuna approssimazione fatta allo scopo di rendere più trattabile la
grande complessità del problema, è stata discussa in dettaglio.
Tale studio ha reso possibile lo sviluppo di un modello diretto di emissione calibrato per
profili atmosferici analitici, con la caratteristica di poter essere impiegato in modo
operativo per la stima di parametri geofisici, qualora sia affiancato sia da misure
radiometriche a microonde sia da un'opportuna tecnica di inversione dei dati. Tali
tecniche sono state dunque illustrate, soffermandosi su quella di Levenberg-Marquardt,
effettivamente utilizzata.
Le uscite in temperatura di brillanza del modello diretto elaborato sono state confrontate
con le corrispondenti uscite di un modello diretto di letteratura (Evans & Stephens,
1991) con caratteristiche di flessibilità e accuratezza di calcolo maggiori, che vanno a
Page 129
129
scapito sia della velocità di esecuzione, sia della possibilità di integrazione in un sistema
adatto alla stima di parametri fisici della sorgente. Le differenze trovate in condizioni
atmosferiche e superficiali standard e per cielo sereno sono sempre all'interno degli
errori di calibrazione assoluta dei radiometri utilizzati.
Si è poi valutato la sensibilità spettrale del modello diretto elaborato, al variare dei
parametri geofisici di ingresso. Tale analisi è di fondamentale importanza per la
determinazione dei parametri da stimare con la tecnica di inversione. Si è dunque scelto
di stimare sei parametri - densità superficiale e scala di altezza del vapore d'acqua,
densità di acqua liquida, gradiente di temperatura atmosferica, velocità e direzione del
vento su mare – che sono caratterizzati dall'essere altamente variabili spazialmente e
temporalmente e/o che influenzano significativamente le uscite del modello. I restanti
valori sono stati invece fissati sulla base di informazioni climatologiche (temperatura
della tropopausa, pressione superficiale secca, salinità del mare) o mediante tecniche di
integrazione dei dati (temperatura atmosferica superficiale e temperatura del mare)
provenienti da sensori diversi.
Sono stati infine raccolti dati relativi ad otto acquisizioni quasi simultanee dei sensori
SSM/I e TMI, in corrispondenza della parte meridionale del bacino del Mediterraneo. I
profili efficaci di vapore d'acqua stimati applicando la metodologia descritta ai dati di
entrambi i radiometri, sono stati integrati su tutta la colonna atmosferica e confrontati
sia tra loro sia con i valori di acqua precipitabile stimati applicando ai dati del
radiometro SSM/I, metodi empirici di letteratura. Da tali confronti è possibile trarre le
seguenti conclusioni:
Le stime di acqua precipitabile ottenute con i dati acquisiti dal radiometro TMI
denotano una buona correlazione con le corrispondenti stime ottenute utilizzando i
dati acquisiti tramite SSM/I, applicando in entrambi i casi la tecnica di inversione e
il modello fisico sviluppato nella presente Tesi.
In corrispondenza della parte meridionale del bacino del Mediterraneo, gli algoritmi
empirici (6.7) e (6.8) stimano l'acqua precipitabile in maniera bimodale. Ciò è
dovuto a una relazione non unica fra acqua precipitabile e irradiazione nel canale del
vapore d'acqua. Tale relazione risulta invece unica se si applicano tecniche di
modellistica fisica.
Page 130
130
Se si considerano separatamente i due differenti modi, si ottengono ottime
correlazioni fra acqua precipitabile stimata empiricamente e tramite tecniche di
inversione.
Il modello diretto sviluppato e la tecnica di inversione utilizzata dimostrano di
essere molto affidabili e applicabili in maniera consistente a radiometri su satellite
differenti.
La strategia modellistica adottata, a differenza delle tecniche empiriche, consente di
determinare contemporaneamente differenti parametri geofisici, rendendo inoltre
possibile la valutazione di profili atmosferici verticali efficaci di temperatura, vapore
d'acqua e – dove presente – di acqua liquida. L'affidabilità di tali stime ed il
miglioramento della loro accuratezza rappresentano le direzioni in cui estendere il
presente lavoro.
Page 131
131
Bibliografia
1. J. Aarons, "Solar System Radio Astronomy", Plenum, New York, 1965.
2. J.C. Alishouse, J.B. Snider, J. Vongsathorn, and R.R. Ferraro, "Determination of
oceanic total precipitable water from the SSM/I", IEEE Trans. Geosci. Remote
Sensing, vol. 28, No. 5, pp. 811-816, 1990.
3. S. P. Arya, "Introduction to Micrometeorology", Academic Press, San Diego, CA,
1988.
4. R. Auty, R. Cole, "Dielectric properties of ice and solid D2O", J. Chem. Phys., 20,
1309-1314, 1952.
5. P. Bauer, P. Schluessel, J. Geophys. Res., "Rainfall, total water, ice water, and water
vapor over sea from polarized microwave simulations and Special Sensor
Microwave / Imager data", 98, D11, 20737-20759, 1993.
6. S. Chandrasekar, "Radiative Transfer", Dover, New York, 1960.
7. C. S. Cox, W. H. Munk, "Measurements of the roughness of the sea surface from
photographs of the sun's glitter", J. Opt. Soc. Am., vol. 44, 838-850, 1954.
8. P. Debye, "Polar Molecules", Dover, New York, 1929.
9. Doviak, R. J., and D. S. Zrnic, "Doppler Radar and Weather Observations", 2nd Ed.,
Academic Press, San Diego, California, 1993.
10. S. Evans, "Dielectric properties of ice and snow – a review", J. Glaciol., 5, 773-792,
1965.
11. K. F. Evans, G. L. Stephens, "A new polarized atmospheric radiative transfer
model", J. Quant. Spectrosc. Radiat. Transfer, vol. 46, no. 5, 413-423, 1991.
12. M. R. Farrar, E. A. Smith, "Spatial resolution enhancement of terrestrial features
using deconvolved SSM/I brightness temperatures", IEEE Trans. Geosci. Remote
Sensing, vol. 30, 349-355, 1992.
13. Ferriday and Avery, "Passive microwave remote sensing of rainfall with SSM/I", J.
Appl. Meteor. Vol. 33, 1587-1596, 1997.
14. N. C. Grody, “Remote sensing of the atmosphere from satellites using microwave
radiometry”, in “Atmospheric Remote Sensing by Microwave Radiometry”, M. A.
Janssen, Editor, John Wiley & Sons, New York, 1993.
Page 132
132
15. J. E. Hansen, L. D. Travis, "Light scattering in planetary atmospheres", Space Sci.
Rev., 16, 527-610, 1974.
16. R. J. Hill, "Water vapor absorption line shape comparison using the 22-GHz line:
the Van Vleck–Weisskopf shape affirmed", Radio Sci., 21, 447-451, 1986.
17. J. Hollinger, J. Pierce, G. A. Poe, "SSM/I instrument evaluation", IEEE Trans. on
Geosci. Rem. Sens., vol. 28, no. 5, 781-790, 1990.
18. J. D. Jackson, “Elettrodinamica Classica”, Zanichelli, Bologna, 1984.
19. M. A. Janssen, “An introduction to the passive microwave remote sensing of
atmospheres”, in “Atmospheric Remote Sensing by Microwave Radiometry”, M. A.
Janssen, Editor, John Wiley & Sons, New York, 1993.
20. L. A. Klein, C. T. Swift, "An improved model for the dielectric constant of sea
water at microwave frequencies", IEEE Trans. Antennas Propag., AP-25, 104-111,
1977.
21. J. D. Kraus, “Radio Astronomy”, McGraw-Hill, New York, 1966.
22. C. Kummerow, J. A. Weinman, "Determining microwave brightness temperature
from precipitating horizontally finite and vertically structured clouds", J. Geophys.
Res., 93, D4, 3720-3728, 1988.
23. C. Kummerow, W. Barnes, T. Kozu, J. Shiue, J. Simpson, "The Tropical Rainfall
Measuring Mission (TRMM) sensor package", J. Atmos. Ocean. Tech., 15, 809-817,
1998.
24. K. S. Lam, "Application of pressure broadening theory to the calculation of
atmospheric oxygen and water vapor microwave absorption", J. Quant. Spectrosc.
Radiat. Transfer, 17, 351-383, 1977.
25. H. J. Liebe, Radio Sci., "An updated model for millimeter wave propagation in
moist air", vol. 20, no. 5, 1069-1089, 1985.
26. H. J. Liebe, “MPM - an atmospheric millimeter-wave propagation model,” Int. J.
Infrared Millimeter Waves, vol. 10, No. 6, pp. 631-650, 1989.
27. H. Liebe, G. Hufford, and T. Manabe, "A model for the complex refractivity of
water and ice at frequencies below 1 THz", Int. J. IR & MM Waves, vol. 12, no. 7,
659-682, 1991.
Page 133
133
28. H. J. Liebe, G. A. Hufford, and M. G. Cotton, “Propagation modeling of moist air
and suspended water/ice particles at frequencies below 1000 GHz”, AGARD Conf.
Proc., vol. 542, pp. 3.1-3.10, 1993.
29. D. G. Long, D. L. Daum, "Spatial resolution enhancement of SSM/I data", IEEE
Trans. Geosci. Remote Sensing, vol. 36, no. 2, 407-417, 1998.
30. McClatchey, R. A., Fenn, R. W., Selby, J. E., A. Volz, F. E. and Garing, J. S.,
"Optical properties of the atmosphere", Environmental Research Papers, 411,
AFCRL-72-0497, Air Force Cambridge Research Laboratories, Bedford,
Massachussets, 1972.
31. S. Migliorini, S. Nativi, D. Giuli, "Atmospheric water vapour measurements using
SSM/I data and RTE approach", IGARSS '98, Vol. III, pp. 1411-1413, Seattle July
1998.
32. S. Migliorini, S. Nativi and D. Giuli, " Water vapour and cloud liquid water
effective profiles retrievals over sea using TRMM Microwave Imager (TMI)",
Satellite Remote Sensing of Clouds and the Atmosphere, SPIE- EUROPTO'99
Symposium, Firenze, Settembre 1999, in stampa.
33. S. Nativi, S. Migliorini and D. Giuli, "Atmospheric Water Vapour over
Mediterranean sea: using a physical model and satellite microwave data", Satellite
Remote Sensing of Clouds and the Atmosphere III, J. E. Russell, Editor,
Proceedings of SPIE Vol. 3495, pp. 136-144, 1998.
34. S. Nativi, S. Migliorini and D. Giuli, "Comparing SSM/I and TMI for the
Estimation of Atmospheric Water Vapour and Cloud Liquid Water over
Mediterranean sea", Satellite Remote Sensing of Clouds and the Atmosphere, SPIE-
EUROPTO'99 Symposium, Firenze, Settembre 1999, in stampa.
35. A. Oort, J. Peixoto, "Global angular momentum and energy balance requirements
from observations", Adv. Geophys., 25, 355-490, 1983.
36. G. Poe, "Optimum interpolation of imaging microwave radiometer data," IEEE
Trans. Geosci. Remote Sensing, vol. 28, No 5, pp. 800-810, 1990.
37. J. L. Peirce, “TMI technical description document”, CDRL 507, Hughes Space and
Communications Company, Los Angeles, CA, 1993.
38. W. H. Press, S. A. Teukolsky, W. T. Vetterling, B. P. Flannery, “Numerical Recipes
in C (2nd
edition)”, Cambridge University Press, Cambridge, 1992.
Page 134
134
39. W. D. Robinson, C. Kummerow, W. S. Olson, "A technique for enhancing and
matching the resolution of microwave measurements from the SSM/I instrument",
IEEE Trans. Geosci. Remote Sensing, vol. 30, 419-429, 1992.
40. P. W. Rosenkranz, "Interference coefficients for overlapping oxygen lines in air", J.
Quant. Spectrosc. Radiat. Transfer, 39, 287-297, 1988.
41. P. W. Rosenkranz, “Absorption of microwaves by atmospheric gases”, in
“Atmospheric Remote Sensing by Microwave Radiometry”, M. A. Janssen, Editor,
John Wiley & Sons, New York, 1993.
42. G. B. Rybicki & A. P. Lightman, “Radiative Processes in Astrophysics”, John
Wiley & Sons, New York, 1979.
43. M. L. Salby, “Fundamentals of Atmospheric Physics”, Academic Press, S. Diego,
1996.
44. P. Schluessel, and W.J. Emery, "Atmospheric water vapour over oceans from SSM/I
measurements", Int. Journal of Remote Sensing, , vol. 11, pp. 753-766, 1990.
45. P. M. Smith, "The emissivity of sea foam at 19 and 37 GHz", IEEE Trans. Geosci.
Remote Sensing, vol. GE-26, 541-547, 1988.
46. A. Stogryn, "Equations for calculating the dielectric constant of saline water", IEEE
Trans. Microwave Theory Techn., MIT-19, 733-736, 1971.
47. A. Stogryn, "The emissivity of sea foam at microwave frequencies", J. Geophys.
Res., 77, 1650-1666, 1972.
48. A. Stogryn, "Estimates of brightness temperatures from scanning radiometer data",
IEEE Trans. Antennas Propag., vol. AP-26, 720-726, 1978.
49. J. A. Stratton, “Electromagnetic Theory”, McGraw-Hill, New York, 1963.
50. A. Tarantola, “Inverse Problem Theory”, Elsevier, New York, 1987.
51. L. Tsang, J. A. Kong, and R. Shin, "Theory of Microwave Remote Sensing", Wiley-
Interscience, New York, 1985.
52. S. Twomey, “Introduction to the Mathematics of Inversion in Remote Sensing and
Indirect Measurements”, Dover, New York, 1977.
53. F. T. Ulaby, R. K. Moore, A. K. Fung, “Microwave Remote Sensing: Active and
Passive”, Vol. 1, Addison-Wesley, Reading, Massachussets, 1981.
54. H. C. van de Hulst, "Light Scattering by Small Particles", Dover, New York, 1981.
Page 135
135
55. J. H. Van Vleck, V. F. Weisskopf, "On the shape of collision-broadened lines", Rev.
Mod. Phys., 17, 227-236, 1945.
56. J. R. Wang and L. A. Chang, “Retrieval of water vapour profiles from microwave
radiometric measurements near 90 and 183 GHz,” J. Appl. Meteor., vol. 29, 1990,
pp. 1005-1013.
57. F. J. Wentz, "A two-scale scattering model for foam-free sea microwave brightness
temperature", J. Geophys. Res., vol. 80, 3441-3446, 1975.
58. F. J. Wentz, “User’s manual SSM/I antenna temperature tapes”, Rev. 1, RSS Tech.
Report 120191, Remote Sensing Systems, Santa Rosa, CA, 1991.
59. F. J. Wentz, "Measurement of oceanic wind vector using satellite microwave
radiometers", IEEE Trans. Geosci. Remote Sensing, vol. 30, no. 5, 960-972, 1992.
60. F. J. Wentz, “AMSR ocean algorithm”, RSS Tech. Report 120296, Remote Sensing
Systems, Santa Rosa, CA, 1996.
61. F. J. Wentz, "A well-calibrated ocean algorithm for SSM/I", J. Geophys. Res., Vol.
102, No. C4, 8703-8718, 1997.
62. T. T. Wilheit, A. T. C. Chang, "An algorithm for retrieval of ocean surface and
atmospheric parameters from the observations of the scanning multichannel
microwave radiometer", Radio Sci., vol. 15, no. 3, 525-544, 1980.
63. S. T. Wu, A. K. Fung, "A non coherent model for microwave emission and
backscattering from the sea surface", J. Geophys. Res., vol. 77(30), 5917-5929,
1972.
64. S. H. Yueh, "Modeling of wind direction signals in polarimetric sea surface
brightness temperatures", IEEE Trans. Geosci. Remote Sensing, vol. 35, no. 6,
1400-1418, 1997.