ALMA MATER STUDIORUM – UNIVERSITA’ DI BOLOGNA II FACOLTA’ DI INGEGNERIA CORSO DI LAUREA SPECIALISTICA IN INGEGNERIA BIOMEDICA Valutazione sperimentale di metodi per la quantificazione della stabilità dello schema motorio Relatore: Prof. Ing. Rita Stagni Azienda/ente ospitante: DEIS Bologna/Cesena presentata da Davide Monari Anno Accademico 2008/2009
Transcript
ALMA MATER STUDIORUM – UNIVERSITA’ DI BOLOGNAII FACOLTA’ DI INGEGNERIA
CORSO DI LAUREA SPECIALISTICA IN INGEGNERIA BIOMEDICA
Valutazione sperimentale di metodi per la quantificazione della stabilità dello schema motorio
Relatore:
Prof. Ing. Rita Stagni
Azienda/ente ospitante:
DEIS Bologna/Cesena
presentata daDavide Monari
Anno Accademico 2008/2009
Introduzione
32% anziani cadono almeno una volta all’anno durante attività giornaliere; il 24% sostiene danni rilevanti (*)
(*) Tinetti, M.E., et al., Risk factors for serious injury during falls by older persons in the community. Journal of the American Geriatrics Society, 1995. 43(11): p. 1214
Valutazione indicatore di stabilità di task motori necessaria!!!
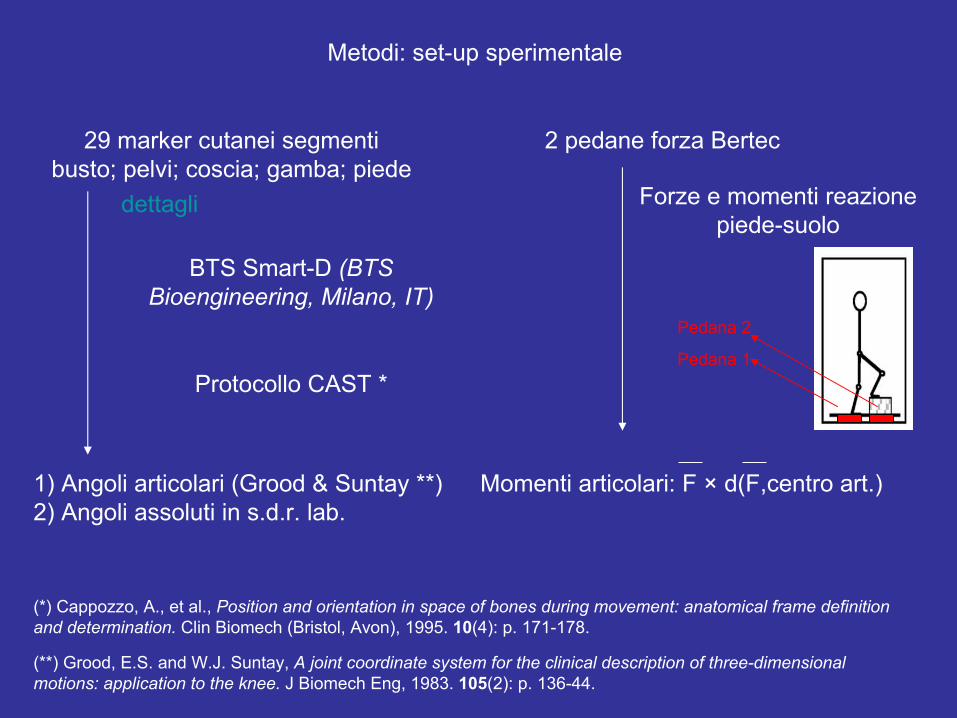
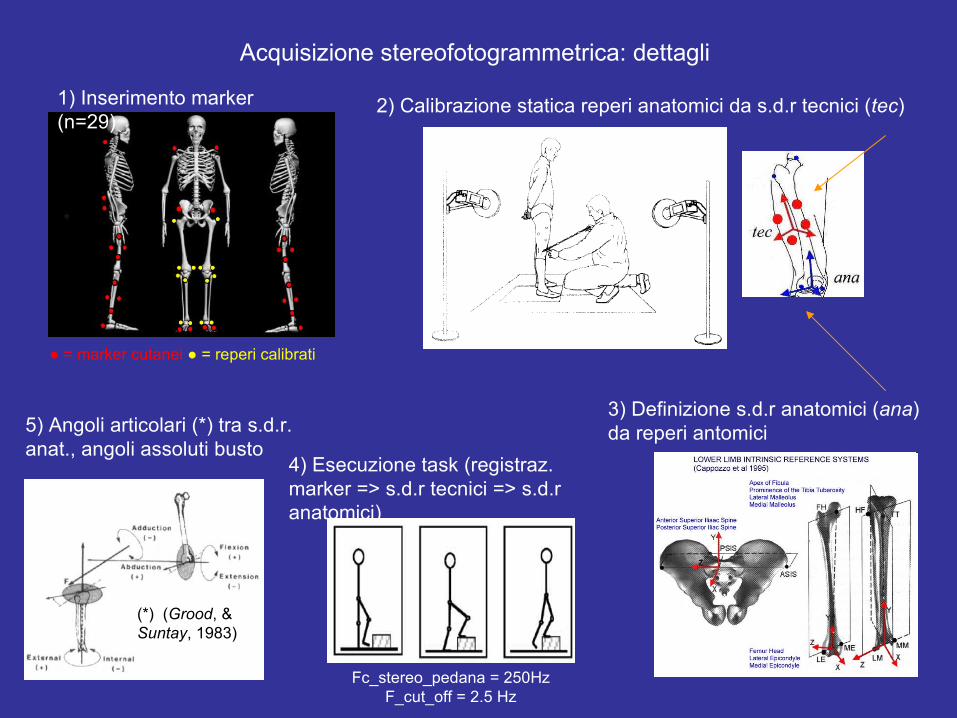
(*) Cappozzo, A., et al., Position and orientation in space of bones during movement: anatomical frame definition and determination. Clin Biomech (Bristol, Avon), 1995. 10(4): p. 171-178.
(**) Grood, E.S. and W.J. Suntay, A joint coordinate system for the clinical description of three-dimensional motions: application to the knee. J Biomech Eng, 1983. 105(2): p. 136-44.